Изобретение относится к области железнодорожного транспорта и может быть применено на транспортных средствах с тяговыми электродвигателями постоянного тока, в частности на маневровых тепловозах с тяговыми электродвигателями постоянного тока.
Известен способ распознавания препятствий на рельсовых путях (заявка DE 19721901 А1, МПК G01S 13/93, B61L 23/04, опубл. 13.11.1997) с использованием радиолокационной системы. При этом соответствующая область рельсового пути перед железнодорожным транспортным средством подвергается излучению так называемого лепестка радиолокационной антенны. Лучи радиолокационной системы отражаются от содержащихся в рельсовом пути и имеющих определенное расположение отражателей и воспринимаются радиолокационным прибором, установленным на железнодорожном рабочем транспортном средстве. Находящееся на рельсовом пути препятствие перекрывает один или несколько отражателей, в результате чего происходит выпадение ожидаемых эхосигналов. Это отсутствие сигналов может быть воспринято как наличие препятствия и с учетом разрешающей способности радиолокационной установки позволяет определить место расположения препятствия.
Недостатком указанного технического способа является необходимость в дополнительных стационарных отражателях радиолокационного сигнала, что наряду с бортовым радиолокационным приемо-передающим устройством существенно удорожает проект.
Известно техническое решение (патент US 5429329, МПК B61L 1/00, опубл. 04.07.1995), из которого следует, что необходимо контролировать приблизительно 1-2 мили рельсового пути перед пассажирским или товарным составом с использованием дополнительного самодвижущегося вспомогательного железнодорожного транспортного средства, причем с помощью телекамеры следующий за ним машинист получает изображение рельсового пути перед самодвижущимся вспомогательным железнодорожным транспортным средством, а также - при наличии препятствия - предупредительные сигналы для своевременного торможения поезда.
К недостаткам указанного технического решения следует отнести необходимость в дополнительном самодвижущемся вспомогательном железнодорожном транспортном средстве, оборудованном специальным телеоборудованием, что также является дорогим техническим решением.
Известно железнодорожное рабочее транспортное средство (патент на изобретение RU №2240942 С2, МПК B61L 23/04, G01S 13/93, Е01В 35/00, опубл. 27.11.2004), принятое за прототип, имеющее ходовые механизмы, причем на торцевой стороне железнодорожного транспортного средства расположен дальномер бесконтактного действия, связанный с устройством управления и имеющий плоскость считывания, образующую с плоскостью пути угол наклона и служащую для формирования линии считывания, образованной плоскостью пути и плоскостью считывания и проходящей поперек продольного направления пути.
Недостатком данного транспортного средства является то, что необходимое оборудование расположено на нем таким образом, что расстояние до препятствия определяется по линии считывания, находящейся в плоскости пути, что в случае естественной неровности рельсового пути, связанной со шпалами, снежными наносами и т.п., может привести к ложному определению расстояния до препятствия и соответствующим неправильным действиям системы управления.
Техническим результатом изобретения является расширение функциональных возможностей маневрового тепловоза путем обеспечения его производительной работы в пределах станции и сортировочной горки, где необходимо контролировать расстояние до ближайших по ходу движения вагонов, отсутствие необходимости в применении вспомогательных самодвижущихся средств и дополнительного стационарного оборудования, отсутствие влияния естественных неровностей рельсового пути, а также обеспечение возможности использования маневрового тепловоза в полностью автоматическом режиме работы без машиниста.
Указанный технический результат достигается тем, что маневровый тепловоз, имеющий ходовые механизмы, тяговую электропередачу с дизель-генераторной установкой с тяговым генератором переменного тока и тяговым выпрямителем или тяговым генератором постоянного тока, питающим тяговые электродвигатели постоянного тока последовательного возбуждения, на торцевых сторонах маневрового тепловоза расположены дальномеры бесконтактного действия, связанные с устройством управления, которое подключено к блоку возбуждения тягового генератора и предусмотрено для управления скоростью движения путем воздействия на блок возбуждения тягового генератора в режимах тяги и электрического торможения, оснащен устройством удаленного контроля, выполненным в виде бортовой специализированной радиостанции, соединенным каналом связи с устройством управления маневрового тепловоза, а дальномеры бесконтактного действия установлены на уровне автосцепных приборов и их плоскость считывания расположена параллельно плоскости рельсового пути, при этом линия считывания формируется пересечением плоскости считывания и плоскости расположения автосцепных приборов ближайшего по ходу движения вагона, перпендикулярной плоскости пути.
В качестве дальномеров бесконтактного действия могут быть применены ультразвуковые уровнемеры.
Указанный технический результат достигается также тем, что в способе эксплуатации маневрового тепловоза без машиниста, заключающемся в непрерывном бесконтактном контроле линии считывания по ходу движения маневрового тепловоза, осуществляют управление движением маневрового тепловоза по командам, поступающим от стационарного поста управления на устройство удаленного контроля, при расстоянии до линии считывания меньше наперед заданного значения контролируют момент скачкообразного увеличения нагрузки тяговых электродвигателей постоянного тока в режиме тяги и скачкообразного уменьшения нагрузки тяговых электродвигателей постоянного тока в режиме электрического торможения, принимают его за момент сцепки с ближайшим по ходу движения вагоном состава и останавливают маневровый тепловоз путем отключения возбуждения тягового генератора и снятия нагрузки с тяговых электродвигателей постоянного тока последовательного возбуждения.
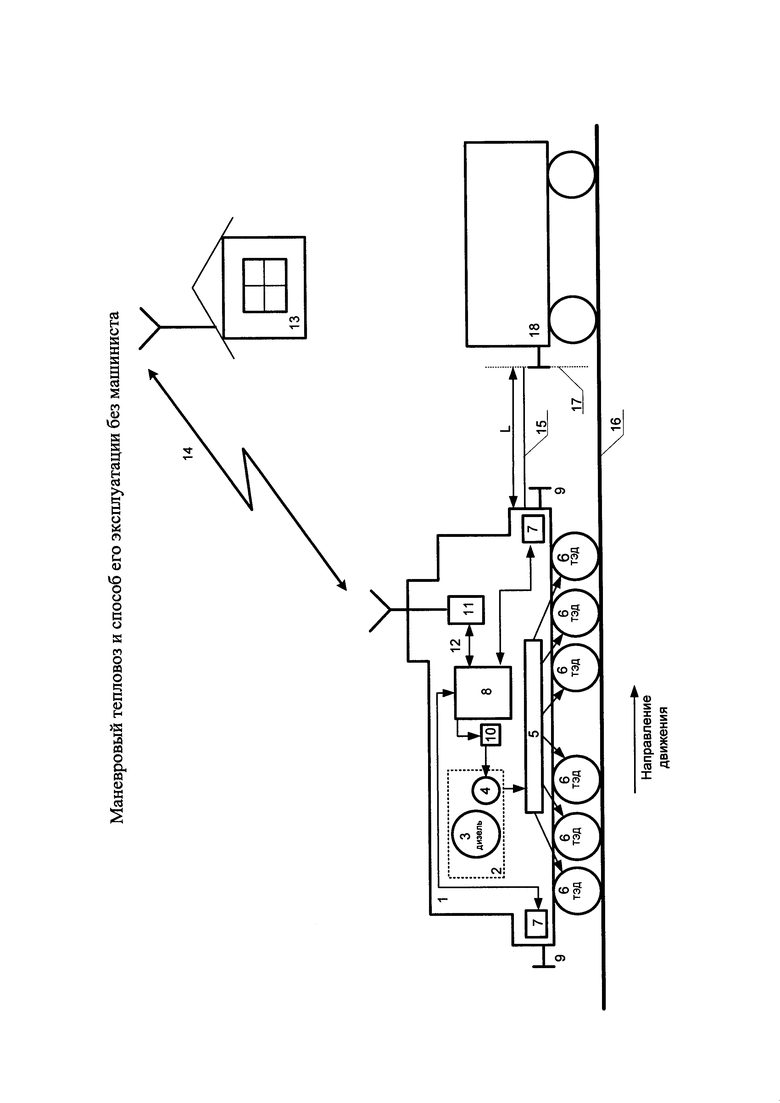
На чертеже схематично изображено устройство маневрового тепловоза, реализующего предложенный способ его эксплуатации без машиниста.
Маневровый тепловоз 1, имеющий ходовой механизм 2, выполненный в виде дизель-генераторной установки, содержащей дизель 3, тяговый генератор 4 переменного тока, подключенный к тяговому генератору 4 переменного тока тяговый выпрямитель 5, соединенный своим выходом с тяговыми электродвигателями 6 постоянного тока последовательного возбуждения, дальномеры 7 бесконтактного действия, подключенные к устройству управления 8 маневрового тепловоза 1 и установленные на уровне автосцепных приборов 9 маневрового тепловоза 1. Устройство управления 8 своим выходом подключено к блоку 10 возбуждения тягового генератора 4. Для обеспечения работы маневрового тепловоза 1 в режиме «без машиниста» он оснащается дополнительно устройством удаленного контроля 11, выполненным, например, в виде бортовой специализированной радиостанции, соединенным каналом связи 12 с устройством управления 8 маневрового тепловоза 1. При этом управление маневровым тепловозом 1 осуществляется со стационарного поста управления 13 по командам, передаваемым по радиоканалу 14. Плоскость считывания 15 дальномеров 7 бесконтактного действия параллельна плоскости 16 рельсового пути и на пересечении с плоскостью 17 автосцепных приборов ближайшего по ходу движения вагона 18, перпендикулярной плоскости 16 рельсового пути, образует линию считывания.
При работе маневрового тепловоза в режиме «без машиниста» все операции выхода маневрового тепловоза с исходной позиции к составу, подъезд и сцепка с составом, надвиг и роспуск состава и возврат на исходную позицию выполняются устройством управления автоматически по командам, поступающим на устройство удаленного контроля от стационарного поста управления по радиоканалу.
При подходе маневрового тепловоза к ближайшему по ходу вагону состава, ожидающего роспуска, устройством управления контролируется расстояние до него посредством непрерывного измерения дальномером бесконтактного действия положения линии считывания, сформированной пересечением плоскости считывания, параллельной плоскости рельсового пути, и плоскости расположения автосцепных приборов ближайшего по ходу движения вагона, перпендикулярной плоскости пути. При расстоянии до линии считывания меньше наперед заданного значения принимается решение о сцепке. Для повышения надежности определения момента сцепки с составом посредством датчиков тока (на чертеже не показаны) контролируется ток нагрузки тяговых электродвигателей постоянного тока последовательного возбуждения, в режиме тяги устройством управления фиксируется момент скачкообразного роста тока нагрузки тяговых электродвигателей постоянного тока последовательного возбуждения, что происходит при сцепке маневрового тепловоза с ближайшим по ходу вагоном состава. Если маневровый тепловоз подходит к ближайшему по ходу движения вагону состава в режиме электрического тормоза, что может быть при наличии уклона, фиксируется момент скачкообразного уменьшения тока нагрузки тяговых электродвигателей постоянного тока последовательного возбуждения, этот момент устройством управления идентифицируется как сцепка маневрового тепловоза с ближайшим по ходу вагоном состава. По факту свершившейся сцепки маневрового тепловоза с составом устройство управления останавливает маневровый тепловоз путем отключения возбуждения тягового генератора и снятия нагрузки с тяговых электродвигателей постоянного тока последовательного возбуждения. Далее по команде со стационарного поста управления маневровый тепловоз в автоматическом режиме осуществляет надвиг и роспуск состава с заданной скоростью. По завершении роспуска состава от стационарного поста управления поступает команда на переезд маневрового тепловоза с заданной скоростью по заданному маршруту на исходную позицию, после чего процесс повторяется.
Для маневровых тепловозов с электропередачей постоянного тока дизельгенераторная установка содержит тяговый генератор постоянного тока. Тяговые электродвигатели постоянного тока последовательного возбуждения в этом случае подключаются напрямую к выходу тягового генератора постоянного тока. В качестве дальномеров бесконтактного действия могут быть использованы ультразвуковые уровнемеры, лазерные приборы или их комбинация.
Предлагаемые изобретения опробованы на маневровом тепловозе ТЭМ7А в условиях работы на сортировочной горке станции Лужская Октябрьской ж.д. и показали положительные результаты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ косвенного измерения дальности от маневрового тепловоза до вагона на прямолинейном участке железнодорожного пути | 2019 |
|
RU2729512C1 |
| Способ измерения дальности от маневрового тепловоза до вагона с помощью лазерного триангуляционного дальномера | 2023 |
|
RU2799481C1 |
| Вагонотолкатель железнодорожных вагонов (варианты) | 2020 |
|
RU2747168C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ТЯГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ ТЕПЛОВОЗА | 1995 |
|
RU2076810C1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2421349C1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2529939C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2010 |
|
RU2423252C1 |
| Способ регулирования электрической передачи тепловоза | 2020 |
|
RU2729865C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ТЯГОВОЙ ПЕРЕДАЧИ МАНЕВРОВОГО ТЕПЛОВОЗА | 2010 |
|
RU2437778C1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2010 |
|
RU2450941C1 |
Группа изобретений относится к электрическим тяговым системам транспортных средств. Маневровый тепловоз содержит ходовые механизмы, тяговую электропередачу с дизель-генераторной установкой, питающую тяговые электродвигатели. На торцевых сторонах маневрового тепловоза расположены дальномеры бесконтактного действия, связанные с устройством управления, которое подключено к блоку возбуждения тягового генератора. Тепловоз содержит устройство удаленного контроля, выполненное в виде бортовой специализированной радиостанции, соединенное каналом связи с устройством управления маневрового тепловоза. Дальномеры бесконтактного действия установлены на уровне автосцепных приборов, и их плоскость считывания расположена параллельно плоскости рельсового пути. Линия считывания формируется пересечением плоскости считывания и плоскости расположения автосцепных приборов ближайшего по ходу движения вагона, перпендикулярной плоскости пути. Способ эксплуатации маневрового тепловоза без машиниста заключается в непрерывном бесконтактном контроле линии считывания по ходу движения маневрового тепловоза и остановке тепловоза в момент сцепки с вагоном. Технический результат заключается в возможности использовать маневровый тепловоз в полностью автоматическом режима. 2 н. и 1 з.п. ф-лы, 1 ил.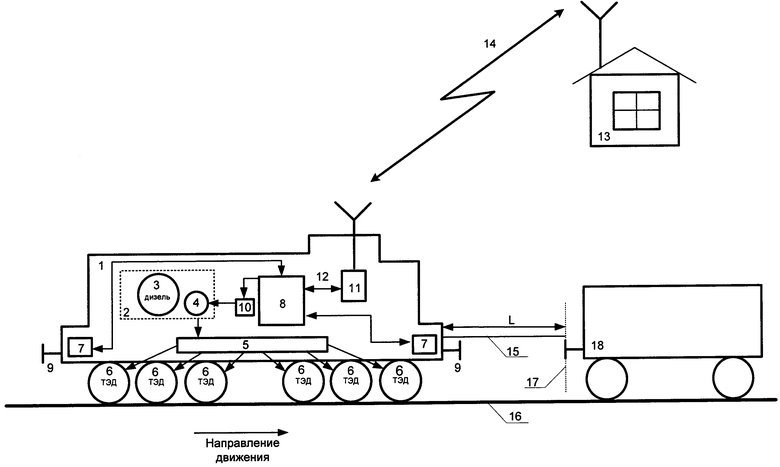
1. Маневровый тепловоз, имеющий ходовые механизмы, тяговую электропередачу с дизель-генераторной установкой с тяговым генератором переменного тока и тяговым выпрямителем или тяговым генератором постоянного тока, питающим тяговые электродвигатели постоянного тока последовательного возбуждения, на торцевых сторонах маневрового тепловоза расположены дальномеры бесконтактного действия, связанные с устройством управления, которое подключено к блоку возбуждения тягового генератора и предусмотрено для управления скоростью движения путем воздействия на блок возбуждения тягового генератора в режимах тяги и электрического торможения, отличающийся тем, что он оснащен устройством удаленного контроля, выполненным в виде бортовой специализированной радиостанции, соединенным каналом связи с устройством управления маневрового тепловоза, а дальномеры бесконтактного действия установлены на уровне автосцепных приборов и их плоскость считывания расположена параллельно плоскости рельсового пути, при этом линия считывания формируется пересечением плоскости считывания и плоскости расположения автосцепных приборов ближайшего по ходу движения вагона, перпендикулярной плоскости пути.
2. Маневровый тепловоз по п. 1, отличающийся тем, что в качестве дальномеров бесконтактного действия могут быть применены ультразвуковые уровнемеры.
3. Способ эксплуатации маневрового тепловоза без машиниста, заключающийся в непрерывном бесконтактном контроле линии считывания по ходу движения маневрового тепловоза, отличающийся тем, что осуществляют управление движением маневрового тепловоза по командам, поступающим от стационарного поста управления на устройство удаленного контроля, при расстоянии до линии считывания меньше наперед заданного значения контролируют момент скачкообразного увеличения нагрузки тяговых электродвигателей постоянного тока в режиме тяги и скачкообразного уменьшения нагрузки тяговых электродвигателей постоянного тока в режиме электрического торможения, принимают его за момент сцепки с ближайшим по ходу движения вагоном состава и останавливают маневровый тепловоз путем отключения возбуждения тягового генератора и снятия нагрузки с тяговых электродвигателей постоянного тока последовательного возбуждения.
| ЖЕЛЕЗНОДОРОЖНОЕ РАБОЧЕЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ БЕЗ МАШИНИСТА | 2002 |
|
RU2240942C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ВОЖДЕНИЯ СОСТАВОВ | 2007 |
|
RU2411147C2 |
| US 2016046308 A1, 18.02.2016 | |||
| US 5758848 A1, 02.06.1998. | |||

