Изобретения относятся к железнодорожному рабочему транспортному средству, имеющему раму, опирающуюся на рельсовый путь при помощи ходовых механизмов и имеющую выполненную с возможностью перемещения по высоте рабочую площадку с устройством управления для приведения в действие механизма для перемещения, а также к способу эксплуатации без машиниста железнодорожного рабочего транспортного средства, выполненного с возможностью передвижения по рельсовому пути.
В отношении таких железнодорожных рабочих транспортных средств существует проблема, заключающаяся в том, что рабочие, находящиеся на рабочей площадке, не могут видеть участок пути, находящийся непосредственно перед транспортным средством. Кроме того, рабочие заняты выполнением своей работы и при изменении положения рабочей площадки видят рельсовый путь по-разному. Поэтому управлять железнодорожным транспортным средством с рабочей площадки крайне опасно и запрещено на многих железных дорогах.
Известен способ распознавания препятствий на рельсовых путях (заявка DE 19721901 А1, 13.11.1997, G 01 S 13/93, В 61 L 23/04) с использованием радиолокационной системы. При этом соответствующая область рельсового пути перед железнодорожным транспортным средствам подвергается излучению так называемого лепестка радиолокационной антенны. Лучи радиолокационной системы отражаются от содержащихся в рельсовом пути и имеющих определенное расположение отражателей и воспринимаются радиолокационным прибором, установленным на железнодорожном рабочем транспортном средстве. Находящееся на рельсовом пути препятствие перекрывает один или несколько отражателей, в результате чего происходит выпадение ожидаемых эхосигналов. Это отсутствие сигналов может быть воспринято как наличие препятствия и с учетом разрешающей способности радиолокационной установки определить место расположения препятствия.
Из уровня развития техники (патент US 5429329 A, 04.07.1995, В 61 L 1/00) известно, что необходимо контролировать приблизительно 1-2 мили рельсового пути перед пассажирским или товарным составом с использованием самодвижущегося вспомогательного железнодорожного транспортного средства. С помощью телекамеры следующий за ним машинист получает изображение рельсового пути перед самодвижущимся вспомогательным железнодорожным транспортным средством, а также - при наличии препятствия - предупредительные сигналы для своевременного торможения поезда.
Задачей предложенного изобретения является создание такого железнодорожного рабочего транспортного средства указанного типа, которым можно очень просто управлять с рабочей площадки.
Согласно изобретению данная задача решается с помощью железнодорожного рабочего транспортного средства указанного типа таким образом, что на его торце находится дальномер бесконтактного действия с плоскостью считывания, которая заключает с плоскостью пути, образованной рельсовым путем, угол наклона и служит для формирования линии считывания, образованной плоскостью пути и плоскостью считывания и проходящей поперек продольному направлению пути.
Благодаря такому выполнению железнодорожного рабочего транспортного средства надежно обеспечивается то, что рабочие, находящиеся на рабочей площадке, не проезжают даже те препятствия, которые не могут видеть, и транспортное средство вовремя останавливается. Таким образом, для рабочих это выгодно тем, что они могут полностью сосредоточиться на своей работе. Целесообразно, что при приближении к препятствию поступает сигнал, обращающий внимание рабочих на опасную ситуацию, так что они не могут пострадать от внезапной остановки машины.
Прочие преимущества и варианты выполнения изобретения даны в зависимых пунктах формулы и представлены на чертежах.
Изобретение описывается ниже более подробно с помощью примера выполнения, представленного на чертежах.
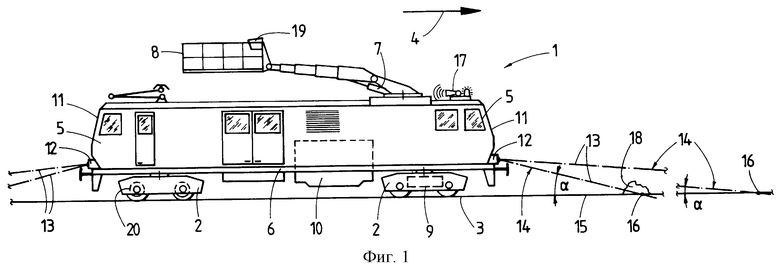
Фиг.1 - вид сбоку железнодорожного рабочего транспортного средства;
Фиг.2 - упрощенный вид сверху на фрагмент железнодорожного рабочего транспортного средства.
Железнодорожное рабочее транспортное средство 1, представленное на фиг.1 и 2, выполнено с возможностью передвижения по рельсовому пути 3 при помощи ходовых механизмов 2 в рабочем направлении 4. На раме транспортного средства 6, имеющей кабины машиниста 5, укреплена рабочая площадка 8, выполненная с возможностью перемещения по высоте при помощи приводов 7. Механизм для перемещения 9 приводится в действие с помощью энергетического блока 10.
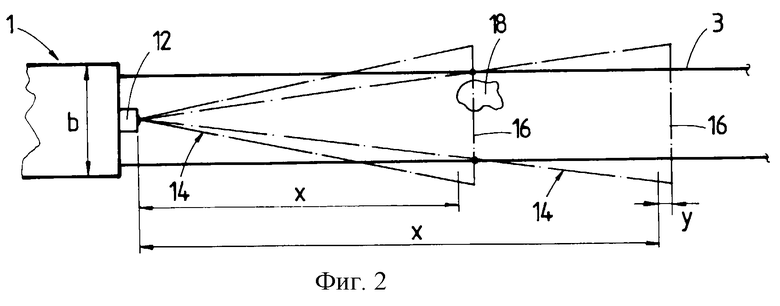
С каждой торцевой стороны 11 рамы 6 транспортного средства находится дальномер бесконтактного действия 12. Он посылает пульсирующий лазерный луч 13, который после отражения вновь регистрируется в дальномере 12. Время между выходом и приемом лазерного луча 13 прямо пропорционально дистанции между дальномером 12 и объектом, вызывающим отражение. С помощью зеркально-поворотного устройства, здесь не представленного, лазерный луч 13 отклоняется и диаграмма направленности расщепляется на множество лепестков с образованием плоскости считывания 14. Последняя заключает с плоскостью пути 15, образованной путем 3, угол наклона α, причем образуется общая линия считывания 16, проходящая перпендикулярно продольному направлению машины или пути.
Для большей надежности предусмотрены первая и вторая или передняя и задняя плоскости считывания 14, каждая из которых имеет различный угол наклона α. Передняя плоскость считывания 14 с передней линией считывания 16, имеющая меньший угол наклона α, служит для активизации акустического сигнального прибора 17 с помощью устройства управления 19, как только с помощью дальномера 12 происходит регистрация препятствия 18, находящегося на пути 3. Это тот случай, когда благодаря отражению лазерного луча 13 от препятствия 18 сокращается минимальное растояние х между дальномером 12 и линией считывания 16. Целесообразно включить определенную допустимую границу у для сокращения расстояния, так чтобы не при каждой малейшей неровности плоскости пути 15 происходила регистрация препятствия.
В процессе эксплуатации рабочее транспортное средство (1) перемещается при непрерывном бесконтактном считывании области рельсового пути (3), находящейся в рабочем направлении (4) непосредственно перед железнодорожным рабочим транспортным средством.
Как только препятствие 18 попадает в следующую плоскость считывания 14 и минимальное расстояние х до дальномера 12 сокращается, с помощью устройства управления 19, связанного с дальномером 12, происходит автоматическое срабатывание тормозного устройства 20 в сочетании с прерыванием нагрузки на механизм для перемещения 9. Таким образом происходит немедленная и надежная остановка транспортного средства 1.
Как видно на фиг.2, длина каждой линии считывания 16, проходящей пepпендикулярно продольному направлению машины, соответствует по меньшей мере ширине b транспортного средства 1.
Изобретения относятся к железнодорожному рабочему транспортному средству. Железнодорожное рабочее транспортное средство имеет раму, опирающуюся на рельсовый путь при помощи ходовых механизмов и имеющую выполненную с возможностью перемещения по высоте рабочую площадку с устройством управления для приведения в действие механизма для перемещения. На торцевой стороне железнодорожного транспортного средства расположен дальномер бесконтактного действия, связанный с устройством управления и имеющий плоскость считывания, заключающую с плоскостью пути, образованной рельсовым путем, угол наклона и служащую для формирования линии считывания, образованной плоскостью пути и плоскостью считывания и проходящей поперек продольному направлению пути. Способ распознавания препятствия в области рельсового пути, находящейся перед железнодорожным рабочим транспортным средством, при непрерывном бесконтактном считывании области рельсового пути, находящейся в рабочем направлении непосредственно перед железнодорожным рабочим транспортным средством, происходит автоматическая остановка транспортного средства, как только при считывании происходит регистрация препятствия, находящегося на пути, и сокращается минимальное расстояние до железнодорожного рабочего транспортного средства. Техническим результатом изобретений является создание железнодорожного рабочего транспортного средства, которым можно очень просто управлять с рабочей площадки. 2 н. и 6 з.п. ф-лы, 2 ил.
| DE 19721901 A1, 13.11.1997 | |||
| ПРОВЕРКА ОФТАЛЬМОЛОГИЧЕСКИХ ЛИНЗ С ПОМОЩЬЮ НЕСКОЛЬКИХ ВИДОВ ИЗЛУЧЕНИЯ | 2012 |
|
RU2586391C2 |
| US 5429329 A, 04.07.1995 | |||
| Способ определения резистентности эритроцитов | 1985 |
|
SU1347013A1 |

