Изобретение относится к области информационно-измерительных систем и может быть использовано в системах компьютерного зрения, предназначенных для решения задачи измерения дальности до объекта по его единственному цифровому видеоизображению. Объектом, до которого измеряется дальность, является ближайший по ходу следования вагон железнодорожного состава, при этом оценивается расстояние между ним и маневровым тепловозом с автоматической системой управления с целью минимизации времени, затрачиваемого на торможение при приближении к составу до момента сценки с ним.
Известен способ измерения дальности до вагона (патент RU 2750364, опубликовано 28.06.2021, МПК: G01C 3/00 (2006.01)), в котором измерение расстояния реализуется с помощью цифровой видеокамеры. Известное техническое решение не требует установки на вагон, дальность до которого измеряется, специальных мишеней или иных реперных устройств, поскольку опорными (реперными) точками для измерения расстояния выступают автоматически выделяемые на изображении камеры точки контакта рельсов железнодорожного пути с колесной нарой. Поскольку ширина рельсового пути априорно известна, это позволяем решить задачу измерения дальности с применением математической модели проективной камеры. При лом при нахождении маневрового локомотива на прямолинейном участке нут с помощью установленной на нем камеры выделяют контурный препарат вертикальных линий наблюдаемой сцены, на котором применением преобразования Хафа выделяют N≤2 прямых линий. После анализа параметров данных линий ρ и θ в пространстве параметров Хафа оставляют только две прямые, которые потенциально соответствуют изображениям рельсов пути, на котором находится маневровый тепловоз. Для точек контурного препарата, принадлежащих указанным прямым, выполняют морфологическую дилатацию, определяют пиксельные координаты точек, соответствующих местам контакта рельсов с колесной парой вагона, и решают уравнения проективной геометрии.
Первым недостатком известного способа является необходимость выполнения контурного анализа и последующего преобразования Хафа для поиска прямых линий на контурном препарате изображения. Известно (Xuming Z., Zhouping Y., Youlun X. Edge detection of the low contrast welded joint image corrupted by noise // Proc. of 8th Int. Conf. on Electronic Measurement and Instruments. Xi'an, 2007. P. 2-876-2-879; Фисенко B.T., ФисенкоТ.К). Компьютерная обработка и распознавание изображений: учеб. пособие. СПб: СПбУ ИТМО, 2008. 192 с.), что на малоконтрастных изображениях, изображениях со смазом, вызванным движением носителя камеры, а также изображениях с неравномерной освещенностью или низким отношением сигнал-шум эффективность операторов выделения границ снижается.
Вторым недостатком известного способа является необходимость наблюдения рельсов железнодорожного пути в процессе сближения с вагоном, что при неблагоприятных для наблюдения метеоусловиях (например, после продолжительного снегопада на участке пути с низкой интенсивностью движения железнодорожных составов) может быть не достижимо.
Из уровня техники известны маневровый тепловоз и способ его эксплуатации без машиниста (патент RU 2630859, опубликовано 13.09.2017, МПК: B60L 11 /02 (2006.01), B61L 23/34 (2006.01), B61L 27/04 (2006.01), B61S 13/94 (2006.01), В61С 5/00 (2006.01)), в котором выполняется измерение дальности до ближайшего по ходу движения маневрового тепловоза вагона, по совокупности признаков выбранный в качестве прототипа. В способе прототипа применяют дальномеры бесконтактною действия, связанные с устройством управления, которое подключено к блоку возбуждения тягового генератора и предусмотрено для управления скоростью движения. Указанные дальномеры бесконтактного действия установлены на уровне автосцепки и их плоскость считывания расположена параллельно плоскости рельсового пути, при этом линия считывания формируется пересечением плоскости считывания и плоскости расположения автосцепки ближайшего по ходу движения вагона, перпендикулярной плоскости пути. Согласно описанию способа, в качестве дальномеров бесконтактного действия могут быть применены ультразвуковые или лазерные дальномеры.
К недостаткам применяемых согласно указанному способ) ультразвуковых дальномеров следует отнести сравнительно малую дальность действия (до 10 метров), а также влияние на абсолютную погрешность измерений скорости ветра.
К недостаткам лазерных дальномеров следует отнести низкое отношение сигнал-шум при проецировании луча на шероховатые поверхности с низкой отражающей способностью (альбедо), что в общем случае характерно для рам вагонов и устройства автосцепки из-за применяемых темных красок и оседающей в процессе эксплуатации вагона пыли, а также наличие интенсивной фоновой помехи от солнца при его расположении вблизи линии горизонта.
Техническая проблема, решаемая созданием заявленного изобретения, заключается в отсутствии сохраняющего работоспособность в различных метеоусловиях и условиях освещенности способа измерения дальности до ближайшего по ходу движения маневрового тепловоза вагона.
Технический результат изобретения заключается в оценивании дальности до вагона с помощью лазерного триангуляционного дальномера, состоящего из цифровой видеокамеры и устройства веерного лазерного подсвета, формирующего растр из N лучей в вертикальной плоскости.
Технический результат достигается следующим образом. Для измерения расстояния до вагона лазерный триангуляционный дальномер проектирую) таким образом, чтобы оптическая ось камеры и центральный луч устройства веерного лазерного подсвета были, по возможности, коллинеарны, или имели угловое расхождение не более десятых долей градуса. Лазерный триангуляционный дальномер располагают на маневровом тепловозе таким образом, чтобы тангаж центрального луча устройства подсвета и оптическая ось камеры были отрицательными (см. геометрическую постановку задачи на фиг. 1), что позволяет минимизировать влияние контрового света на фотоприемное устройство.
Предполагается, что цифровая видеокамера и устройство веерного лазерного подсвета предварительно откалиброваны, например, согласно известным из уровня техники способам (патент US 10436884 В2, опубликовано 08.10.2019, МПК: H04N 7/18 (2006.01), G01S 7/497 (2006.01).
Решение триангуляционной задачи для каждого i-го луча устройства веерного лазерного подсвета, i=1,2,…,N, потенциально позволяет оценить пространственные координаты М, в системе координат лазерного триангуляционного дальномера. В общем случае оцепить пространственные координаты возможно до М≤N точек сцены Mi, поскольку для части отражений отношение сигнал-шум может оказаться ниже порогового (зеркальное отражение, низкое альбедо и др.).
Для решения задачи измерения дальности до вагона необходимо осуществить переход из системы координат лазерного триангуляционного дальномера в систему координат автосцепки маневрового тепловоза. При априори известном конструктивном размещении лазерного триангуляционного дальномера для указанного перехода необходимо умножить вектор пространственных координат каждой точки М, на матрицу трансформации Т:
где
R и t - соответственно матрица поворота и вектор параллельного переноса системы координат автосцепки  относительно системы координат лазерного триангуляционного дальномера
относительно системы координат лазерного триангуляционного дальномера  , а вектор
, а вектор  .
.
Если ось  системы координат автосценки сопаправлена со строительной осью маневрового тепловоза, ось
системы координат автосценки сопаправлена со строительной осью маневрового тепловоза, ось  направлена вправо, а ось
направлена вправо, а ось  - вверх (фиг. 1), то, исходя из геометрической постановки задачи, дальность до точек
- вверх (фиг. 1), то, исходя из геометрической постановки задачи, дальность до точек
а их высота над поверхностью рельсового пути
где  - априори известная высота автосцепки над поверхностью рельсового пути.
- априори известная высота автосцепки над поверхностью рельсового пути.
Для геометрической постановки задачи и нумерации лучей устройства веерного лазерного подсвета согласно фиг. 1 значения, которые примут элементы массива {Hi}, иллюстрирует фиг. 2. Лучи подсвета, мощность отражений от которых не превышает порог, показаны на фиг. 1 пунктирными линиями (номера лучей 2, 4, 5). Оценка координат М, для них не производится, поэтому значениям высоты Hi ставится в соответствие (см. фиг. 2) признак «X» - «не измерено».
Для идентификации номера луча, который отражен от вагона, применяется пороговая обработка: для каждого луча, кроме лучей с признаком «X», в порядке возрастания номера выполняется сравнение значения Hi с порогом  . Если порог впервые превышен для некоторого
. Если порог впервые превышен для некоторого  за координаты точки вагона Мваг принимается точка
за координаты точки вагона Мваг принимается точка  Таким образом, если
Таким образом, если

то дальность до вагона
Поскольку исходя из постановки задачи (фиг. 1) в процессе сближения маневрового локомотива с вагоном измеренная дальность может скачкообразно меняться из-за того, что отражения одного или нескольких лучей от вагона лазерным триангуляционным дальномером не фиксируются, необходимо применение временной медианной или низкочастотной фильтрации измерений дальности  Для уменьшения флуктуации измерений дальности при наличии информации о скорости движения маневрового тепловоза также может применятьвся калмановская фильтрация.
Для уменьшения флуктуации измерений дальности при наличии информации о скорости движения маневрового тепловоза также может применятьвся калмановская фильтрация.
Из геометрической постановки задачи также следует, что абсолютная систематическая (вызванная ошибкой измерения углового направления на центр отражения лазерного луча о\р) и случайная (вызванная случайной скачкообразной ошибкой идентификации углового направления в связи с не обнаружением одного или нескольких отражений лучей подсвета от вагона) погрешность измерения линейно зависит от дальности до вагона, то в процессе сближения с составом обе погрешности линейно уменьшаются.
Изобретение относится к области информационно-измерительных систем и предназначено для решения задачи измерения дальности до ближайшего по ходу следования вагона железнодорожного состава. Сущность предлагаемого способа заключается в применении триангуляционного лазерного дальномера, состоящего из устройства веерного лазерного подсвета и регистрирующей камеры, а также формирующего растр из N лучей в вертикальной плоскости. Для отражений от лазерных лучей с отношением сигнал-шум выше порогового оцениваются пространственные координаты в системе координат лазерного триангуляционного дальномера и выполняется их пересчет в систему координат устройства автосцепки. Далее определяется номер луча, отражение от которого имеет высоту в системе координат автосцепки выше порога Нпор. Дальность до этого отражения в системе координат автосцепки принимается за оценку дальности до вагона Дваг. Техническим результатом осуществления заявленного изобретения является возможность оценки дальности до вагона с помощью лазерного триангуляционного дальномера. 3 з.п. ф-лы, 2 ил.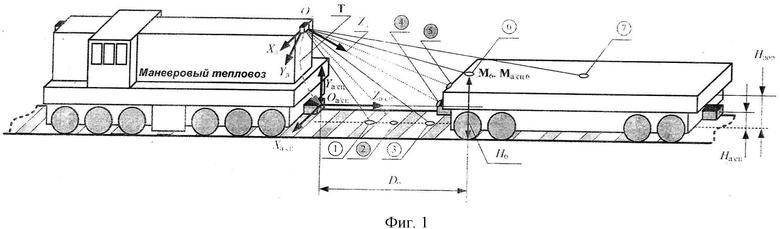
1. Способ косвенного измерения дальности от маневрового тепловоза до вагона с помощью лазерного триангуляционного дальномера, заключающийся в непрерывном бесконтактном контроле линии считывания по ходу движения маневрового тепловоза, на торцевых сторонах которого расположены дальномеры бесконтактного действия, связанные с устройством управления, при этом линия считывания формируется для ближайшего по ходу движения вагона, отличающийся тем, что в качестве дальномера бесконтактного действия применяют триангуляционный лазерный дальномер, состоящий из устройства веерного лазерного подсвета и регистрирующей камеры, при этом тангаж центрального луча устройства подсвета и оптической оси камеры является отрицательным, для отражений от лазерных лучей с отношением сигнал-шум выше порогового оцениваются пространственные координаты в системе координат лазерного триангуляционного дальномера, выполняется их пересчёт в систему координат устройства автосцепки, определяется номер луча, отражение от которого имеет высоту в системе координат автосцепки выше порога Hпор и дальность до этого отражения в системе координат автосцепки принимается за оценку дальности до вагона Dваг.
2. Способ по п.1, отличающийся тем, что для уменьшения флуктуаций измерений дальности до вагона Dваг применяется временная медианная фильтрация.
3. Способ по п.1, отличающийся тем, что для уменьшения флуктуаций измерений дальности до вагона Dваг применяется временная низкочастотная фильтрация.
4. Способ по п.1, отличающийся тем, что для уменьшения флуктуаций измерений дальности до вагона Dваг применяется Калмановская фильтрация.
| Маневровый тепловоз и способ его эксплуатации без машиниста | 2016 |
|
RU2630859C1 |
| Способ косвенного измерения дальности от маневрового тепловоза до вагона на прямолинейном участке железнодорожного пути | 2019 |
|
RU2729512C1 |
| US 20160046308 A1, 18.02.2016 | |||
| US 20010046310 A1, 29.11.2001 | |||
| WO 2018195999 A1, 01.11.2018. | |||
