Изобретение относится к железнодорожной технике и может быть использовано для автоматизированного вождения грузовых составов, с возможностью их соединения на ходу в соединенный поезд, движения в виде соединенного поезда и разъединения на ходу, а так же движения составов с минимальным интервалом между ними. Соединенным поездом принято считать, как минимум, два соединенных отдельных состава, содержащих локомотивы и вагоны, расположенные следом за ними. При этом хвостовой вагон впереди идущего состава соединен с локомотивом позади идущего состава. В настоящее время соединение составов в соединенный поезд производится на стоянке, а тормозные магистрали в соединенном поезде обычно сообщаются. Одна из сложностей ведения таких поездов заключается в необходимости определения величин допустимых продольных сил в соединенном поезде. Для оценки этих сил можно использовать как расчетный метод, так и непосредственные измерения. Так, для состава, содержащего, как минимум, один локомотив и вагоны, предложена методика расчета продольных сил, привязанная к траектории движения для каждой единицы в поезде. Данные расчетов при этом выводятся на экран для машиниста локомотива для более надежного и эффективного управления поездом (пат. № US 4042810, G09B 9/04, B61G 001/08, G06F 015/20, от 16.08.1977; пат. № US 6144901, В60Т 13/66; В60Т 17/18; В60Т 17/22; G05B 13/02; G05B 017/00, от 7, 11, 2000). В рамках развития этого метода предложено использование измерительной автосцепки с тензодатчиком в системе управления тягой локомотива (пат. US. №483 8173, В61С 17/12; B61G 9/20, G05D 15/01, В61С 17/00, B61G 9/00, G05D 15/00; от 13.06.1989). В дальнейшем такие автосцепки с датчиками усилий, расположенными на одной из сцепок локомотивов, было предложено применять и в соединенном поезде. Ведомые локомотивы передают их данные головному локомотиву, для минимизации динамических усилий соединенного поезда. При этом некоторые измеренные силы могут предназначаться для вычисления других расчетных данных. Управление осуществляет головной локомотив, используя средства связи и поддерживая измеряемые силы в области минимизированных расчетных значений. Как вариант, также предлагается независимое управление тормозами вспомогательных локомотивов при получении соответствующего сигнала с ведущего локомотива. Применение блока хвостового вагона для контроля и управления тормозной магистрали с хвоста поезда не предусмотрено. Предложенное решение описано в отношении двух ведомых локомотивов с вагонами, соединенных обычным образом с сообщением тормозных магистралей (пат. US №5950967, B60L 15/32, B60L 15/38, B60L 15/00, В61С 17/00, В61С 17/12, от 14.09.1999). Соединение отдельных составов в соединенный, по-видимому, выполнялось аналогично тому, как это описано Kraeling, et al. в патенте US №7177732, то есть один из составов находился в неподвижном состоянии. В вышеназванном патенте система для стыковки локомотива со стоящими вагонами использует датчик скорости, акселерометр, датчик расстояния, и/или датчик пробуксовки колеса. В качестве данных, свидетельствующих о факте присоединения локомотива к вагону, используются изменения скорости, ускорения и расстояния. В качестве датчика расстояний может применяться любое устройство, известное в области техники, типа ультразвукового или лазерного датчика расстояния. Вышеназванные решения касаются только отдельных аспектов вождения железнодорожных составов, включая присоединение локомотива к стоящим вагонам, и не затрагивают вопроса присоединения (и отсоединения в дальнейшем) одного состава к другому в движении без сообщения их тормозных магистралей.
Известна система автоматизированного вождения грузовых поездов повышенной массы и длины с распределенными по их длине локомотивами, содержащая установленные на каждом локомотиве приемопередающие блоки, микроконтроллеры, датчики контролируемых параметров (давления, скорости, тока и напряжения), средства для автоведения, диагностики, сигнализации и формирования сигналов управления исполнительными элементами системы отдельного локомотива, при этом на головном локомотиве блок центрального микроконтроллера подключен к передатчику приемопередающего блока через прибор формирования команд, несущих информацию об обобщенных режимах движения (пат. RU №2238860, В61С 17/12, от. 12.11.2003). Предлагаемое решение осуществляет способ передачи управляющих команд на ведомый локомотив и согласования рабочих параметров силовой установки и тормозной системы всего длинномерного состава за счет выполнения собственной программы управления локомотивами. Учет профиля пути движения выполнен за счет использования предварительно записанной в блоке памяти информации из бортовой базы данных профиля пути. При этом тормозные магистрали составов соединены обычным образом, в результате чего отсутствует возможность соединения и разъединения составов на ходу. Блок хвостового вагона (БХВ) для контроля и управления тормозной магистралью состава на хвостовом вагоне поезда и автосцепка с функций измерения продольных сил на локомотивах не используются. Поэтому этот способ не позволяет тестировать техническое состояние тормозной магистрали и параметры движения в хвосте соединенного поезда, а также проводить контроль продольных сил и ускорений. Трудности ведения такого поезда могут возникнуть при незапланированной остановке на станции, длина приемо-отправочных путей которой может оказаться меньше длины соединенного поезда, что влияет на безопасность движения. Возможность раздельного ведения составов с минимальным интервалом отсутствует.
Известна система предупреждения о впереди идущем составе, содержащая блок локомотива поезда с функцией контроля и управления, блок хвостового вагона с той же функцией контроля и управления, прибор определения положения на местности в виде приемников GPS, установленных как на локомотиве, так и в блоке хвостового вагона, и блоки приемопередачи с передачей информации в направлении голова состава - хвост на частоте 452,9375 МГц и хвост - голова на частоте 457,9375 МГц. Указанная система предназначена для отдельных составов, следующих друг за другом на расстоянии. Данные блока хвостового вагона впереди идущего состава передаются также на локомотив следом идущего состава. При этом блоки контроля и управления разрешают передачу данных только тогда, когда отсутствует прием на частоте передачи, используя протокол логики множественного доступа. Расстояние до впереди идущего поезда определяется с помощью данных со спутниковой системы GPS полученных на следом идущем локомотиве с хвоста впереди идущего состава (pat. US №5757291, B61L 23/34; B61L 25/02 от 26.05.1998). При таком способе ведения составов, несмотря на возможность получения данных о впереди едущем составе, не предусматривается возможность стыковки-расстыковки на ходу поезда. В указанном патенте решается задача только предупреждения о положении составов относительно друг друга на местности. Не рассматривается вопрос экономии энергии путем соединения поездов при прохождении сложных по профилю участков. Контроль ускорений и продольных усилий в составах не предусмотрен. Данные по профилю пути движения не используются.
Известна система для очень близкого попутного движения составов, содержащая на локомотивах средства определения положения (GPS), подготовки и передачи данных (радиомодем под управлением бортового компьютера), контроля и управления давлением тормозной магистрали и скоростью. Эффективное управление составами осуществляется диспетчерским центром через базовые ретрансляторы или спутниковую радиосвязь. Здесь отсутствует БХВ и средства непосредственного измерения расстояний между составами. Отсутствуют средства для стыковки-расстыковки составов на ходу. Отсутствует возможность синхронизации движения составов без использования диспетчеров.
Известен способ для очень близкого попутного движения составов на безопасном минимальном расстоянии, которое учитывает минимальный тормозной путь для следом идущего состава. Длина тормозного пути и продольные усилия в составе рассчитываются на основе данных о положении состава, скорости, ускорении и силе тяги (pat. US. №6580976, В60Т 7/12; В60Т 13/66; В60Т 17/18; В60Т 17/22; от 2003-06-17).
Недостатком является то, что контролируется только расстояние между составами, что приводит к задержке подачи команды торможения во втором составе, особенно при самопроизвольном срабатывании тормозов в первом составе. Поэтому в системах, которые контролируют только положение и скорость впереди идущего состава, возникает задержка выполнения торможения вторым составом, что приводит к необходимости вводить дополнительное резервное расстояние между составами. Синхронизацию движения осуществляет диспетчерский центр посредством радиосвязи, что может нарушить безопасность при ее временном отсутствии.
Известна система вождения соединенного поезда с распределенными по его длине локомотивами со своими группами вагонов, содержащая установленные на каждом локомотиве (вагоне) микроконтроллеры с подключенными к ним приборами индикации, памяти, датчиками давления и скорости, блоками приемопередачи и исполнения команд, переданных электропневматическому тормозу (pat. US №5681015 А, В61С 17/12, 1997). Здесь некоторое число вагонов объединено в отдельный узел с локальным передатчиком на некотором локомотиве (вагоне), который может связываться с ведущим локомотивом на одной частоте (400 МГц) и с другими аналогичными узлами по разным каналам другой полосы частот (2,4 ГГц). Передача информации между локальными узлами в составе группы проводится при этом на пониженной мощности на соответствующем канале. Хвостовой вагон поезда имеет БХВ.
Эта система обеспечивает способ ведения путем передачи команд управления на торможение по радиосети и электрическим проводам сети управления электропневматическими тормозами состава, состоящего из специализированных грузовых вагонов с толкачами или без оных (в России электропневматические тормоза на грузовых вагонах отсутствуют). Передача информации предусматривает режим малой мощности по выделенному каналу для отдельных групп вагонов на свой локомотив и ретранслирование им на ведущий (головной) локомотив. Здесь используется сложный алгоритм передач «малой» мощности на расстояние в несколько десятков вагонов с использованием одного и того же приемопередающего блока локомотива группы.
Приемопередатчик блока хвостового вагона использует разные частоты выделенной узкой полосы частот для приема и передачи сообщений с хвостового вагона на ведущий локомотив и обратно. Контроль продольных усилий и ускорений в составе с соединенными тормозными магистралями не производится. Не обеспечивается вождение поездов с минимальным интервалом и возможность сцепки-расцепки на ходу. Не заложено также использование данных по профилю пути движения для оптимизации параметров движения, экономии энергоресурсов.
В качестве прототипа принят способ управления тормозами в соединенных грузовых поездах, включающий синхронизацию управления объединенными тормозными магистралями и тягой с использованием радиосвязи. (Инструкция по эксплуатации тормозов подвижного состава железных дорог, ЦТ-ЦВ-ЦЛ-ВНИИЖТ/277.2002, стр 64-74). Управление тягой и тормозами осуществляется машинистами. Команды подаются голосом по радиосвязи. Для обеспечения плавности движения соединенного поезда вводятся ограничения темпов торможения и изменения тяги. Ведомый состав присоединяется к ведущему, находящемуся в неподвижном состоянии. Режимы ведения такого соединенного поезда отрабатываются с использованием измерительного вагона для снятия характеристик продольных сил в зависимости от профиля пути. При использовании способа управления с объединенной тормозной магистралью возможна ситуация, когда в режиме торможения за счет возникшей задержки на приведение машинистом подталкивающего локомотива тормозов в действие, будет осуществляться подпитка тормозной магистрали из крана машиниста ведомого локомотива. При этом в части вагонов ведущего состава произойдет несрабатывание тормозов, в результате чего может иметь место выдавливание вагонов первого состава ведомым локомотивом, выполняющим функцию подталкивающего. Инструкцией допускается в отдельных случаях использование разъединенных магистралей. Недостаток этого метода заключается в том, что при применении торможения вторым локомотивом задержка выполнения торможения первым локомотивом может привести к разрыву поезда.
Известна система для управления тормозами, где в блоке хвостового вагона используется датчик величины и направления ускорений (акселерометр) для контроля ускорений в вертикальном и горизонтальном направлениях (pat. US №6087950. B61L 1/14; B61L 15/00; B61L 1/00; B61L 15/00; G08B 21/00, от 2000.07.11). Конструкция пневматической части здесь не раскрывается. Указанный акселерометр, устанавливаемый как отдельным узлом от блока хвостового вагона, так и в виде его неотъемлемой части, предназначен только для контроля составляющих ускорения. Возможность использования в качестве уклономера для регистрации профиля пути здесь не предусмотрена, так же как и возможность использования в качестве датчика схода вагона с рельсов.
Известно техническое решение, используемое для контроля и управления тормозной магистралью поезда, содержащее блоки контроля с датчиками контроля параметров и управления с микропроцессором для приведения в действие исполнительных механизмов торможения или тяги и блоками приемопередачи радиосигнала на локомотиве и блоке хвостового вагона (пат. RU №046984, B60T 17/22, В61/Н 11/00, G05B 11/01, от 25.11.2004). Техническая задача, решаемая здесь, направлена на повышение надежности за счет модернизации пневматической части путем введения новых элементов в блок хвостового вагона. Предложенное решение позволяет надежно выполнять торможение с хвостового вагона состава.
Однако в указанном техническом решении, являющемся наиболее близким по совокупности признаков и по технической сущности к заявляемой системе, не обеспечивается возможность осуществления синхронизации тормозных магистралей и тяги двух составов. Кроме того, не имеется возможности выделения дополнительного канала для передачи данных по радиоканалу малой мощности на другой выделенной частоте на следом идущий локомотив для проведения процессов стыковки - расстыковки на ходу поезда. Не установлены средства для измерения имеющихся ускорений и уклонов пути соответствующими датчиками. На локомотиве отсутствуют средства определения расстояний до хвостового вагона впереди идущего состава, средства для контроля параметров профиля пути и средства для проведения автоматической стыковки-расстыковки и контроля указанного процесса. Отсутствуют средства для контроля продольных усилий на автосцепках локомотивов. Т.е. система не имеет необходимой совокупности технических средств для реализации способа, так как предназначена для ведения отдельного состава.
Технической задачей заявляемого способа и системы для вождения составов является расширение технических возможностей и выполнение требования гарантированной безопасности при движении составов с минимальным интервалом между ними, выполнении сцепки на ходу, движении в виде соединенного поезда и расцепки на ходу.
Поставленная задача решается следующим образом. Известный способ вождения составов включает присоединение ведомого состава к стоящему ведущему и дальнейшее их движение с синхронизацией управления объединенными тормозными магистралями соединенного поезда и тягой локомотивов с использованием радиосвязи. Предлагаемый способ отличается тем, что осуществляют соединение в единый поезд с автономными тормозными магистралями движущихся составов, контролируя при этом процессе дистанцию между составами с помощью нескольких средств определения дальности, например, в виде приборов GPS и расположенных на локомотивах дальномеров, а также используя, для обеспечения синхронизации необходимых параметров движения составов, передачу между локомотивом впереди идущего состава, блоком хвостового вагона впереди идущего состава и локомотивом позади идущего состава показаний датчиков давления в тормозной магистрали, ускорений и др. по двум каналам связи, затем выполняют движение соединенного поезда с продолжением указанной синхронизации параметров движения с контролем продольных усилий на автосцепках локомотивов, после чего, завершив движение в виде соединенного поезда, производят его расстыковку на ходу с последующим движением составов друг за другом, использующим алгоритм безопасного ведения на вычисленном опорном расстоянии между составами, полученном на основании всех имеющихся инструментальных данных и возможностей указанной синхронизации, до очередной стыковки или остановки по графику движения.
Выше указанное опорное расстояние является минимальным, обеспечивающим остановку составов при экстренном торможении первого состава без набегания второго состава на первый, определяемое с учетом тормозных путей первого и второго состава. В процессе выполнения стыковки и расстыковки при движении составов на расстоянии меньше опорного при использовании экстренного торможения ведущим составом способ и система обеспечивают остановку ведомого состава с набеганием на ведущий на скорости, не превышающей допустимую для стыковки составов.
Кроме того, движение составов друг за другом без их соединения выполняется с использованием алгоритма безопасного ведения на вычисленном опорном расстоянии между составами, полученном на основании всех имеющихся инструментальных данных и возможностей указанной синхронизации.
Данные о составляющих ускорения, получаемые с датчика ускорений блока хвостового вагона, могут быть переданы на локомотив и служить в качестве параметра плавности ведения поезда, данных о сходе вагона с рельсов, профиля пути и целостности состава. Кроме того, ведомый состав стыкуется к впереди стоящему ведущему, производя эту операцию без объединения тормозных магистралей с автоматическим контролем скорости сближения на основе имеющихся инструментальных данных. Параметры давления тормозной магистрали, скорости и другие с хвостового вагона на следом идущий локомотив дополнительно могут быть переданы передатчиком по второму каналу с началом работы второго канала по достижении расстояния, равного максимальному тормозному пути одного из составов.
Кроме того, показания датчика ускорений блока хвостового вагона передаются на локомотив и служат в качестве параметра плавности ведения соединенного поезда, данных о сходе вагона с рельсов, данных о профиле пути.
Способ управления реализуется путем использования системы для вождения составов, включающей блоки контроля и управления тормозной магистралью на локомотиве и в хвосте отдельного состава с использованием средств приемопередачи, имеющей, согласно изобретению, на локомотивах средства обмена данными и командами между локомотивами и блоком хвостового вагона, средства определения расстояний до впереди едущего состава, например, в виде дальномера и GPS, кроме того, измерительную автосцепку с управляемой при движении функцией сцепки - расцепки, при этом для контроля указанной функции используются приборы контроля, например видеокамеры, установленные на локомотивах с возможностью поворота, а в блоке хвостового вагона содержится дополнительное приемопередающее устройство для передачи параметров необходимых для управления движением, в том числе давления, координат и ускорений в соответствии с показаниями установленных на блоке хвостового вагона датчиков на локомотив следом идущего состава по двум каналам связи.
Кроме того, отдельные функции наблюдения видеокамеры (за автосцепкой, за впереди идущим поездом и др.) выполняют различные камеры.
Кроме того, для выполнения функции датчика схода вагона с рельс в блоке хвостового вагона может содержаться дополнительный датчик ускорений для измерения вертикальной составляющей ускорения.
Кроме того, датчик (и) ускорений одновременно выполняет функцию определения параметров профиля пути, привязанных к данным положения GPS, плавности хода и датчика схода вагона с рельс.
Может применяться дополнительный контроль расстояния между составами с помощью видеокамеры, работающей в режиме измерения дальности. Кроме того, видеокамера дополнительно выполняет функции контроля положения (высоты) автосцепки.
Кроме того, видеокамера, работающая в инфракрасном диапазоне, с инфракрасным прожектором и системой обработки и вывода изображения, в условиях осадков дополнительно обеспечивает увеличение дальности видимости без ослепления машиниста.
Предлагаемая система позволяет водить составы с любым расстоянием между ними, контролировать скорости сближения составов и проводить стыковку и расстыковку на ходу с необходимым уровнем безопасности, так как работа тормозных систем и тяги составов синхронизирована, расстояние контролируется по нескольким средствам измерения и его величина может определяться по координатам, передаваемым двумя независимыми передатчиками, работающими в разных частотных диапазонах, установленными в блоке хвостового вагона. В случае отказа БХВ впереди идущего состава, расстояние непосредственно контролируется с помощью дальномера, а так же по показаниям GPS ведущего локомотива и запомненной длине первого состава. При этом, если нет чрезвычайной ситуации, то задний состав отстает, контролируя дистанцию оставшимся средством. При этом расстояние дополнительно может контролироваться видеокамерой, работающей в режиме измерения дальности.
При выполнении стыковки составов на ходу управляющая система изменяет скорость сближения составов до нормативной и производит стыковку обоих составов. При ведении соединенных поездов достигается экономия энергоресурсов и увеличивается пропускная способность магистрали. Использование двух независимых приемопередатчиков блока хвостового вагона и локомотивов способствует повышению безопасности движения за счет повышения надежности используемой системы. При этом первый приемопередатчик используется для связи между локомотивами и передачи команд управления на БХВ, второй служит для связи между блоком хвостового вагона первого состава и локомотивом следом идущего состава и включается в работу при достижении расстояния, равного максимальному тормозному пути одного из составов. Плавность ведения обеспечивается контролем ускорений БХВ. Автосцепка с датчиком усилия способствуют плавному ведению соединенного поезда за счет соответствующего влияния второго локомотива на параметры движения и служит для контроля усилия толкания, предотвращения сверхнормативных продольных усилий, приводящих к выдавливанию вагонов и обрывам автосцепок. Используется отслеживание нештатных вертикальных ускорений для идентификации случаев схода вагона с рельсов. Именно все приведенные выше признаки позволяют решить поставленную задачу. Более конкретно, варианты исполнения заявляемого решения излагаются нижеследующим описанием.
Система вождения составов содержит блоки контроля и управления на локомотивах и на хвостовых вагонах (чертеж): 1 - блок контроля и управления локомотива, 2 - два приемопередатчика локомотива, работающих в разных диапазонах частот (например: один 160 МГц, а другой 430 МГц или 2,4 ГГц) 3 - блоки GPS на локомотивах, (на блоке хвостового вагона не показаны) 4 - дальномер, 5 - блок хвостового вагона БХВ, 6 - тормозная магистраль, 7 - автосцепка с датчиком продольных усилий, 8 - соединительный рукав тормозной магистрали хвостового вагона, 9 - видеокамера. 10 - антенна первого приемопередатчика для частоты f1, 11 - антенна второго приемопередатчика на другой частоте f2. Датчики продольных усилий, ускорений с функцией уклономера, датчика схода вагона с рельсов блока хвостового вагона на чертеже не показаны. Блок хвостового вагона с автономным электропитанием подключается соединительным рукавом тормозной магистрали 8 и устанавливается на автосцепке последнего вагона состава.
Реализуется заявляемый способ вышеприведенной системой, например, следующим образом. Два состава следуют друг за другом. Синхронизация работы тормозных магистралей и тяги производится, как только составы сближаются на расстояние, достаточное для устойчивой радиосвязи между всеми приборами связи системы.
Затем они могут следовать с некоторым минимальным интервалом между ними, обеспечивающим торможение (остановку) без соударений при любых вариантах торможений. Его величину выше назвали опорной для данной пары составов, и ее можно определить на основании всех имеющихся инструментальных данных с учетом тормозной эффективности и тормозного пути для каждого из составов. В таком рабочем режиме при использовании системы каждый локомотив получает данные о параметрах движения и давлении в тормозной магистрали с БХВ, установленных на хвостовых вагонах впереди идущего и сзади идущего составов. При этом данные о местоположении локомотивов и БХВ устройства контроля и управления получают с использованием GPS. При этом следом идущий состав, используя GPS-систему 3 и данные от блока хвостового вагона 5 впереди идущего состава, определяет расстояние до впереди идущего состава. Дополнительно это расстояние контролируется с использованием дальномера 4, установленного на этом локомотиве. Программа блока контроля и управления ведущего локомотива в соответствии с заложенным алгоритмом по имеющимся данным вырабатывает оптимальный режим движения и определяет последовательность команд на исполнительные элементы как локомотива, так и блока хвостового вагона состава, для поддержания опорного расстояния между составами. Другой вариант - первый состав идет со скоростью, определяемой графиком движения и другими условиями (видимость, наличие препятствий и т.п.), а второй состав самостоятельно поддерживает заданное расстояние. При этом на дисплей локомотива выводятся давление в тормозной магистрали, показания GPS, дальномера и другая необходимая информация, в том числе с датчиков ускорений с функцией определения профиля пути, схода вагона с рельс блоков хвостового вагона и с датчика усилий на автосцепке, имеющей функцию автоматической сцепки - расцепки (узел управления замком автосцепки здесь не показан). При управлении движением в качестве ограничительного параметра, кроме контроля предельных усилий на автосцепке, также возможно использование значения предельно допустимого ускорения. Данные о вертикальной составляющей ускорения с датчиков ускорений непрерывно отслеживаются для сигнализации в случае схода вагонов с рельсов. Дополнительно блок хвостового вагона передает на следом идущий локомотив данные о всех изменениях давления в тормозной магистрали, о местоположении и другую информацию. Следом идущий локомотив находится в пределах радиуса действия обоих приемопередатчиков БХВ и принимает их сообщения. Таким образом, обеспечивается движение составов друг за другом. При необходимости, соединение движущихся друг за другом составов в соединенный поезд блок-контроля и управления впереди идущего либо следом идущего локомотива вырабатывает алгоритм сближения таким образом, чтобы преодолеть опорное расстояние между составами и на допустимой разнице скоростей составов состыковаться. Затем блок контроля и управления ведущего локомотива формирует необходимые команды исполнительным устройствам системы соединенного поезда для дальнейшего движения.
При этом стыковка может быть реализована как в ручном, так и в автоматическом режиме (применяются известные решения по управлению тягой). В первом случае блок контроля и управления выдает параметры движения, а управление осуществляется машинистом. Во втором случае мягкая стыковка обеспечивается блоком управления. После соединения составов блоки контроля и управления обеспечивают как синхронную, так и асинхронную работу тормозных систем составов, задавая на основе алгоритма ведения параметры необходимой мощности для каждого локомотива по усилию на автосцепке ведомого локомотива. Стыковка может быть осуществлена и со стоящим поездом на скорости, допускаемой соответствующей инструкцией, с использованием показаний приборов измерения дистанции и скорости. При необходимости, может производиться расстыковка на отдельные составы, с использованием автосцепки с функцией расцепки на ходу. При этом блок контроля и управления второго локомотива вырабатывает соответствующий алгоритм управления локомотивом, формирует соответствующие команды исполнительным элементам системы и разъединяет соединенный поезд на отдельные составы в движении на перегоне. Затем в пункте остановки осуществляется их поочередный прием в соответствии с планом приема - отправлений.
Как одно из применений предложенного способа может рассматриваться стыковка двух отдельных составов перед подъемом: задний состав подталкивает передний на подъеме, а передний помогает заднему составу, когда он находится на спуске, а второй на подъеме. Кроме того, может быть достигнуто повышение безопасности движения и сокращение времени формирования соединенных поездов, формируемых стыковкой с неподвижно стоящим составом, но без объединения тормозных магистралей.
Передача состояния тормозной системы с локомотива и хвоста первого состава на локомотив второго состава обеспечивает безопасность движения составов на любой сколь угодно малой дистанции за счет синхронизации тормозных систем. Использование передачи по двум независимым радиоканалам повышает надежность системы.
Таким образом, заявляемые способ и система для вождения составов позволяют с соблюдением всех мер безопасности осуществлять их стыковку и расстыковку в движении, водить составы с минимальным интервалом между ними. На предлагаемое техническое решение разработано техническое задание и проводится подготовка к проведению испытаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗАМИ СОЕДИНЕННЫХ ПОЕЗДОВ | 2010 |
|
RU2453457C2 |
| СПОСОБ ВОЖДЕНИЯ СОЕДИНЕННЫХ ПОЕЗДОВ | 2007 |
|
RU2354569C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДОВ ПОВЫШЕННОГО ВЕСА И ДЛИНЫ | 2008 |
|
RU2385247C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИСПЫТАНИЯ ТОРМОЗНОГО ОБОРУДОВАНИЯ ВАГОНОВ | 2009 |
|
RU2414366C2 |
| ХВОСТОВОЕ УСТРОЙСТВО КОНТРОЛЯ ЦЕЛОСТНОСТИ ПОЕЗДА | 2021 |
|
RU2764478C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНОЙ МАГИСТРАЛЬЮ ПОЕЗДА | 2006 |
|
RU2311309C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2020 |
|
RU2729753C1 |
| Способ и устройство измерения величины и направления продольных динамических реакций в поезде | 2021 |
|
RU2770998C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2015 |
|
RU2591551C1 |
| СПОСОБ И СИСТЕМА ДЕЦЕНТРАЛИЗОВАННОГО ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2021 |
|
RU2763015C1 |
Изобретение относится к железнодорожной технике, в частности к способу вождения составов, как в виде соединенного поезда, так и отдельных составов. Способ предусматривает для соединения составов на ходу, а затем разъединения соединенного поезда и следования отдельных составов на минимальном расстоянии регистрацию измеряемых блоком хвостового вагона параметров в хвосте поезда и передачу данных, как головному локомотиву, так и следом идущему. Способ реализуется системой, содержащей устройства управления локомотивами и блоки хвостовых вагонов. При этом локомотивы оборудованы средствами определения расстояний до впереди идущего состава, например дальномером и GPS. В системе используют автосцепку с динамометром и с контролируемой функцией автоматической сцепки-расцепки, а также приборы контроля функции сцепки-расцепки, например, видеокамеры с возможностью поворота. В блоке хвостового вагона содержится дополнительное приемопередающее устройство для передачи по двум каналам связи параметров, необходимых для управления движением. Технический результат обеспечивает расширение технических возможностей и повышение безопасности движения. 2 н. и 10 з.п. ф-лы, 1 ил.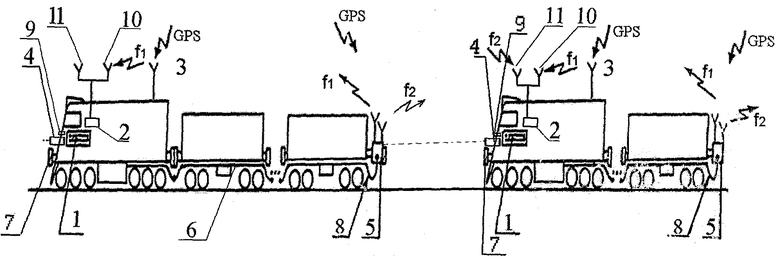
1. Способ вождения составов, включающий присоединение ведомого состава к ведущему с синхронизацией при дальнейшем движении управления тормозными магистралями составов и тягой локомотивов с использованием радиосвязи, отличающийся тем, что осуществляют соединение в единый поезд с автономными тормозными магистралями движущихся составов, контролируя при этом процессе дистанцию между составами с помощью нескольких средств определения дальности, например, в виде приборов GPS и расположенных на локомотивах дальномеров, а также используя для обеспечения синхронизации необходимых параметров движения составов передачу между локомотивом впереди идущего состава, блоком хвостового вагона впереди идущего состава и локомотивом позади идущего состава показаний видеокамер, дальномеров, GPS-системы датчиков давления в тормозной магистрали, ускорений и усилий автосцепки по двум каналам связи, затем выполняют движение соединенного поезда с продолжением указанной синхронизации параметров движения с контролем продольных усилий на автосцепках локомотивов, после чего, завершив движение в виде соединенного поезда, производят его расстыковку на ходу с последующим движением составов друг за другом, использующим алгоритм безопасного ведения на вычисленном опорном расстоянии между составами, полученном на основании всех имеющихся инструментальных данных и возможностей указанной синхронизации, до очередной стыковки или остановки по графику движения.
2. Способ по п.1, отличающийся тем, что движение составов друг за другом без их соединения выполняется с использованием алгоритма безопасного ведения на вычисленном опорном расстоянии между составами, полученном на основании всех имеющихся инструментальных данных и возможностей указанной синхронизации.
3. Способ по п.1, отличающийся тем, что ведомый состав стыкуется к впереди стоящему ведущему, производя эту операцию без объединения тормозных магистралей с автоматическим контролем скорости сближения на основе имеющихся инструментальных данных.
4. Способ по п.1, отличающийся тем, что параметры скорости, показания видеокамер, дальномеров, GPS-системы, датчиков давления в тормозной магистрали, ускорений и усилий автосцепки с хвостового вагона на следом идущий локомотив дополнительно передаются передатчиком по второму каналу с началом работы второго канала при достижении расстояния, равного максимальному тормозному пути одного из составов.
5. Способ по п.1, отличающийся тем, что показания датчика ускорений блока хвостового вагона передаются на локомотив и служат в качестве параметра плавности ведения соединенного поезда, данных о сходе вагона с рельсов, данных о профиле пути.
6. Система для вождения поездов, включающая блоки контроля и управления тормозной магистралью и тягой на локомотивах и блок контроля и управления тормозной магистралью в хвосте отдельного состава с использованием средств приемопередачи, отличающаяся тем, что имеет на локомотивах средства обмена данными и командами между локомотивами и блоком хвостового вагона, средства определения расстояний до впереди идущего состава, например, в виде дальномера и GPS-системы, кроме того, измерительную автосцепку с управляемой при движении функцией сцепки - расцепки, при этом для контроля указанной функции используются приборы контроля, например видеокамеры, установленные на локомотивах с возможностью поворота, а в блоке хвостового вагона содержится дополнительное приемопередающее устройство для передачи параметров, необходимых для управления движением, в том числе давления, координат и ускорений в соответствии с показаниями установленных на блоке хвостового вагона датчиков на локомотив следом идущего состава по двум каналам связи.
7. Система по п.6, отличающаяся тем, что отдельные функции наблюдения видеокамеры за автосцепкой и/или за впереди идущим поездом выполняют различные камеры.
8. Система по п.6, отличающаяся тем, что датчики ускорений одновременно выполняют функцию определения параметров профиля пути, привязанных к данным положения GPS-системы, плавности хода и датчика схода вагона с рельс.
9. Система по п.8, отличающаяся тем, что функцию датчика схода вагона с рельс в блоке хвостового вагона выполняет дополнительный датчик ускорений, измеряющий вертикальную составляющую ускорения.
10. Система по п.6, отличающаяся тем, что может применяться дополнительный контроль расстояния между составами с помощью видеокамеры, работающей в режиме измерения дальности.
11. Система по п.6, отличающаяся тем, что видеокамера дополнительно выполняет функции контроля положения автосцепки.
12. Система по п.6, отличающаяся тем, что видеокамера, работающая в инфракрасном диапазоне, с инфракрасным прожектором и системой обработки и вывода изображения, в условиях осадков дополнительно обеспечивает увеличение дальности видимости без ослепления машиниста.
| US 5757291 А, 26.05.1998 | |||
| СИСТЕМА АВТОМАТИЗИРОВАННОГО ВОЖДЕНИЯ ГРУЗОВЫХ ПОЕЗДОВ ПОВЫШЕННОЙ МАССЫ И ДЛИНЫ С РАСПРЕДЕЛЕННЫМИ ПО ИХ ДЛИНЕ ЛОКОМОТИВАМИ | 2003 |
|
RU2238860C1 |
| US 2003182030 А1, 25.09.2003 | |||
| US 5950967 А, 14.09.1999. | |||

