Изобретение относится к самоходным транспортным средствам боевого применения, в частности, для разведки образцов вооружений и инженерной разведки местности, обеспечения ремонта, эвакуации раненого экипажа и других задач.
Известен мобильный робототехнический комплекс [1]. Мобильный робототехнический комплекс включает мобильный робот, пост дистанционного управления, комплект дополнительного оборудования. Мобильный робот представляет собой самоходное транспортное средство с электроприводными движителями и бортовыми источниками питания, на котором смонтирована система дистанционной связи с постом дистанционного управления, бортовая телевизионная система, которая включает отдельные видеоблоки, расположенные на звеньях многостепенного манипулятора и на корпусе транспортного средства, причем каждый видеоблок содержит видеокамеру, заключенную в защитный кожух с источниками подсветки, и по меньшей мере один из видеоблоков, выполняющий обзорные функции, расположен на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях, при этом на транспортном средстве закреплен манипулятор с захватным устройством и его приводы, система сигнализации, разъемы для подключения бортового, сервисного оборудования и зарядного устройства, кронштейны для укрепления бортового оборудования и бортовая система диагностики с бортовыми пультами управления и устройствами индикации. Мобильный робототехнический комплекс дополнительно снабжен выносной системой видеонаблюдения. Мобильный робот дополнительно включает устройство доставки выносной системы видеонаблюдения в заданную точку местности и ее оперативного развертывания, а комплект дополнительного оборудования - раздвижную телескопическую штангу-удлинитель, с узлом вертикального крепления ее в кормовой части транспортного средства мобильного робота на одном конце и узлом крепления привода наведения видеоблока, выполняющего обзорные функции, - на другом конце.
Недостатками аналога являются:
- высокая сложность устройств для установки оборудования;
- недостаточная конструктивная жесткость установочных устройств, эксплуатирующихся в составе самоходного транспортного средства, передвигающегося в условиях пересеченной местности;
- сложность монтажных работ;
- низкая степень оптимизации компоновочных решений.
Известен робототехнический комплекс разведки и огневой поддержки [2]. Робототехнический комплекс построен по модульному принципу и содержит следующие функционально законченные модули: платформу, представляющую собой базовое шасси с системой управления движением, средствами связи, пунктом дистанционного управления и системой электропитания, навесное оборудование: боевой модуль с комплектом вооружения и пунктом дистанционного управления, разведывательный модуль. Составные части комплекса выполнены с возможностью реализации задач по назначению самостоятельно. Шасси выполнено в гусеничном варианте с возможностью передвижения в городских условиях, по пересеченной местности, преодоления препятствий, разворота на 360° на месте, с возможностью обеспечения максимальной скорости передвижения до 25 км/ч. Корпус шасси - несущий, сварной из броневых стальных листов. Система управления платформой дополнительно оснащена системой топопривязки и ориентирования, выполненной с возможностью начального определения координат с помощью аппаратуры спутниковой навигации, определения азимута продольной оси шасси, выставления известного азимута, непрерывного расчета координат местоположения и углов крена, тангажа, азимута. Система электропитания робототехнического комплекса имеет два номинала напряжения для силовой установки движителя и бортовую сеть питания аппаратуры и навесное оборудование. Для каждого номинала напряжения предусмотрена литий-железофосфатная аккумуляторная батарея. Система электропитания оснащена микропроцессорным блоком контроля заряда, выполненным с возможностью регулирования, контроля зарядного тока, а также контроля и устранения дисбаланса заряда каждого элемента аккумуляторной батареи. Роботизированный комплекс дополнительно оснащен системой предупреждения столкновений, принцип действия которой основан на обработке сигналов с ультразвуковых датчиков.
Недостатками аналога являются:
- ограниченные функциональные возможности основных систем мобильного робота, обеспечивающих его управляемость, ориентацию в пространстве, информационный обмен, предупреждение столкновений;
- недостаточная эффективность системы технического зрения;
- несовершенная система подвески шасси;
- низкая эффективность системы связи и передачи данных;
- отсутствие мониторинга состояния независимых электроприводов;
- отсутствие оптимальных алгоритмов управления движением платформы;
- низкая оснащенность пункта дистанционного управления.
Наиболее близким к предлагаемому техническому решению является многофункциональный робототехнический комплекс обеспечения боевых действий [3], сформированный из группы универсальных роботизированных платформ, выполненных с возможностью их комплектации различными вариантами функциональных модулей: боевой дистанционно-управляемый модуль, модуль разведки, транспортный модуль, причем составляющая наполненность комплекса определяется в зависимости от планируемой боевой задачи, универсальная роботизированная платформа оснащена системой навигации и топопривязки и обеспечивает перемещение как в дистанционном ручном режиме, так и в полуавтоматическом, который подразумевает движение по траектории, задаваемой оператором путем ввода географических координат узловых точек маршрута, передачи информации о скорости и направлении движения, углах продольного и поперечного крена, текущих координатах, движение по траектории, сохраненной ранее при движении в ручном режиме, автоматическое возвращение в исходную точку по пройденному маршруту, универсальная роботизированная платформа обеспечивает автоматический объезд препятствий, пункт дистанционного управления обеспечивает как одновременное управление всей группой универсальных роботизированных платформ с любыми установленными на них функциональными модулями, так и их последовательное управление, после выхода платформы в точку дислокации боевой дистанционно-управляемый модуль обеспечивает обнаружение цели, ее автоматическое сопровождение и поражение, запоминание в произвольной последовательности нескольких неподвижных целей с последующим автоматическим наведением и открытием огня, модуль разведки обеспечивает обнаружение цели, ее распознавание с определением координат, определение дальности до цели, транспортный модуль обеспечивает транспортирование возимой полезной нагрузки и ее надежную фиксацию на платформе, а также при необходимости эвакуацию раненых, дополнительное оборудование в виде автомобиля с кузовом-фургоном обеспечивает размещение и доставку к месту использования всей группы платформ с установленными на них функциональными модулями, пульта дистанционного управления и выгрузку платформ из кузова-фургона своим ходом.
Недостатками прототипа являются:
- ограниченные функциональные возможности составных частей робототехнического комплекса, обеспечивающих его управляемость, ориентацию в пространстве, информационный обмен;
- ограниченные функциональные возможности боевого применения робототехнического комплекса;
- недостаточная мощность огневого поражения.
Задача изобретения - повышение эффективности разработанного роботизированного комплекса и его надежности, а также расширение его функциональных возможностей.
Поставленная задача достигается тем, что в многофункциональном наземном робототехническом комплексе, содержащем самодвижущее транспортное средство, систему связи и передачи данных и систему управления, различные функциональные модули, устанавливаемые в зависимости от планируемой боевой задачи, согласно изобретению самодвижущееся транспортное средство выполнено виде универсальной платформы на гусеничном ходу, состоящей из корпуса с поплавковой подложкой, ходовой части, трансмиссии, силовой установки, источника питания, основной и дублирующей системы управления, причем источник питания выполнен в виде двух аккумуляторных батарей, размещенных в герметичных отсеках, а блоки корпуса представляют собой комплекс сборочных единиц, предназначенных для размещения оборудования ходовой части, трансмиссии, силовой установки, систем управления, источника питания, при этом универсальная платформа выполнена с широкой площадью соприкосновения и оснащена клиновидным бампером для преодоления густорастущих зеленых насаждений и низкорастущих деревьев, позволяющей преодолевать заболоченные участки, а устройства крепления на корпусе выполнены универсальными под сменную пластину с возможностью установки нескольких модулей, а также на корпусе размещены крепление для установки манипулятора , на конце которого прикреплен крюк с лебедкой на электроприводе для эвакуации раненого из окопов и блиндажей и буксировочное сцепное приспособление с механизмом дистанционной сцепки.
Достигаемым техническим результатом является создание эффективного роботизированного комплекса низкой стоимости, высокой надежности и одновременным расширенным кругом задач боевого применения со следующими функциями:
• транспортировка одновременно нескольких систем вооружения при различных условиях боевых действий;
• транспортировка полезного груза;
• транспортировки боеприпасов и буксировки других РТК;
• обнаружение и обезвреживание минно-взрывных заграждений;
• эвакуация раненых из-под огня противника, в ближайшие укрытия.
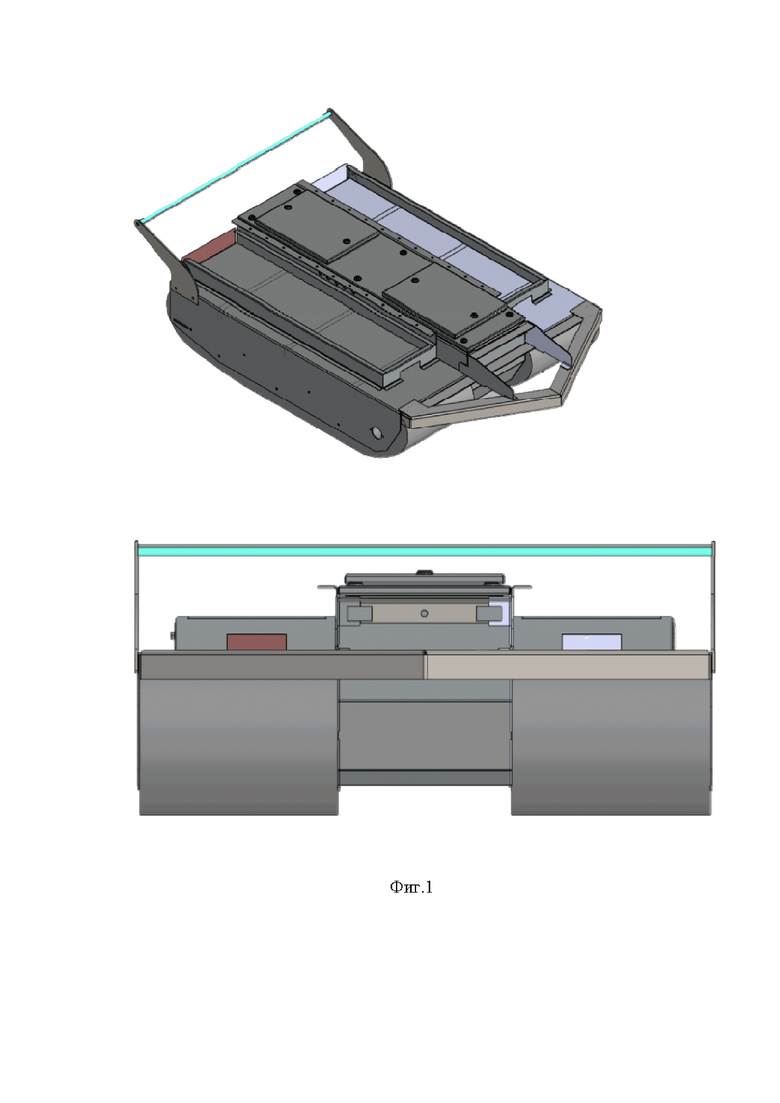
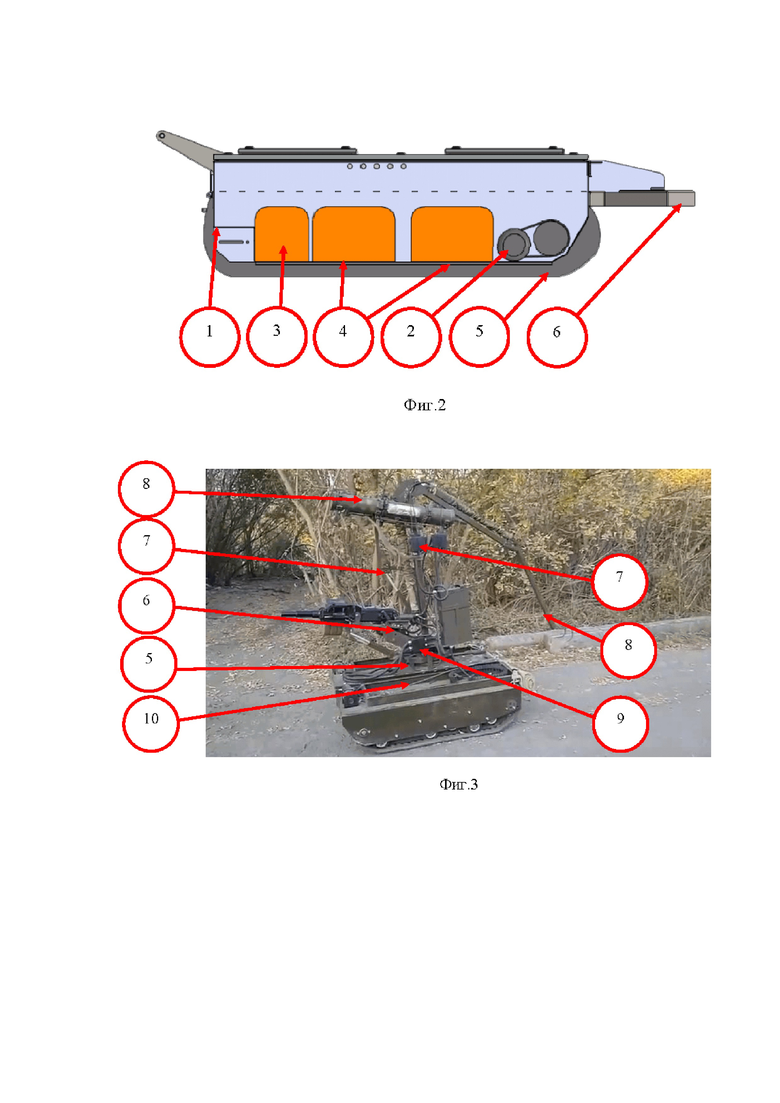
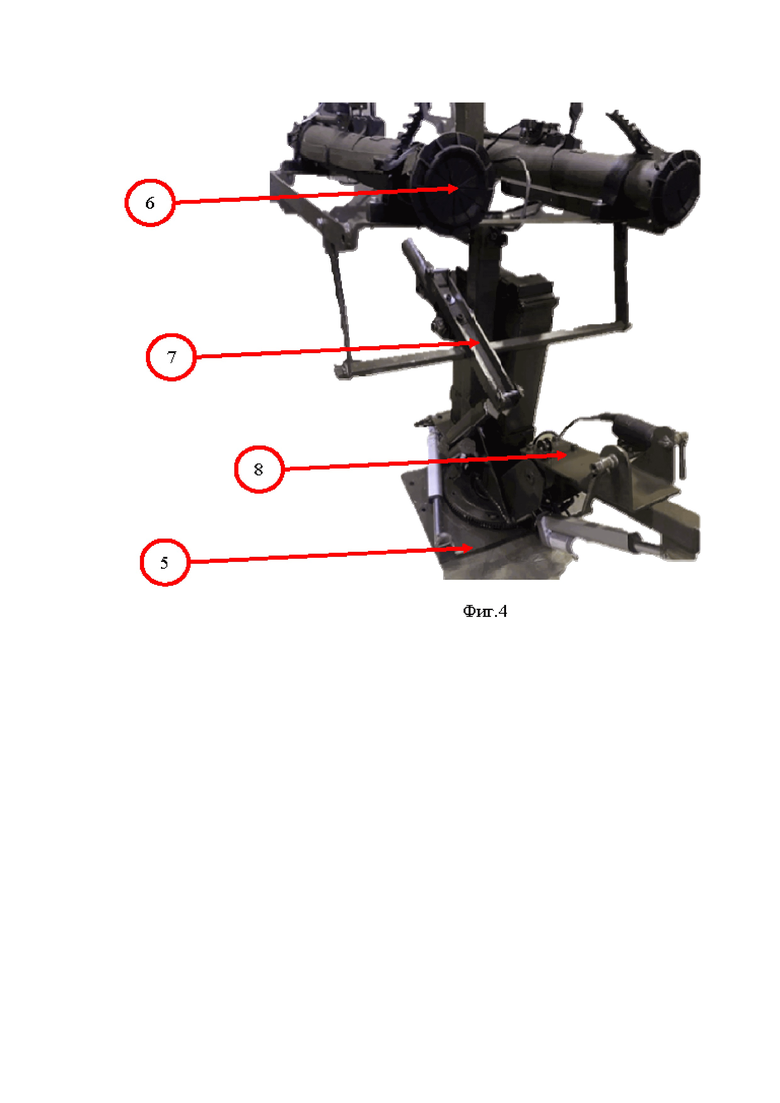
На фиг. 1. представлен общий вид наземного многофункционального робототехнического комплекса. На фиг. 2: 1 - герметичный корпус с поплавковой подложкой (место размещения оборудования ходовой части), 2 - силовая установка с цепной передачей, 3 - место размещения оборудования системы управления, 4 - место размещения источника питания (АКБ), 5 - гусеничная шасси шириной 380 мм, 6 - клиновидный бампер. На фиг. 3 и фиг. 4: 7 - модуль передающего устройства видеопотока, 8 - функциональный крюк манипулятора, 9 - модуль приёмопередающего устройства управления, 10 - устройство дистанционного сброса мин, 11 - универсальная переходная пластина, 12 - боевой модуль АГС-17, 13 - боевой модуль ПКТ,14 - боевой модуль РПО.
Предлагаемый многофункциональный наземный робототехнический комплекс работает следующим образом. Оператор перед использованием многофункционального наземного робототехнического комплекса (МНРТК) включает прерыватели массы машины, тем самым подаёт питание на плату управления и контроллеры электродвигателей. Далее оператор самостоятельно принимает решение использовать основную систему управления (ОСУ) или дублирующую систему управления (ДСУ). Затем оператор подключается к комплексу и отправляет сигналы, которые принимает плата управления модуля управления 9 и, обработав полученную информацию, передаёт сигнал контроллерам моторов и остальным исполняющим элементам. Управление вертикальной наводкой вооружения осуществляется за счёт подачи сигнала управления на плату управления. После приёма сигнала программа высчитывает угол отклонения вооружения на заданную дальность и отправляет данные шаговому мотору (исполнитель), который в свою очередь поднимает вооружение с помощью повышающего редуктора. Стрельба из вооружения осуществляется за счёт изменения положения кулачка на сервоприводе по команде платы управления. Возможные два режима стрельбы: одиночный и очередь.
Конструкция МНРТК представляет собой самодвижущее устройство с пультом дистанционного управления, оборудована устройствами крепления для установки системы вооружения, грузовой платформы, миноискателя, технических средств эвакуации, устройства для установки минно-взрывных заграждений. В зависимости от обстановки МНРТК может быть оснащен боевым модулем (АГС - 17, РПО-А «Шмель», РПГ-7, ПКТ), предназначенным для выполнения специальных задач, имеющий систему вооружения, обеспечивающую ведение эффективного огня по объектам и живой силе противника.
В состав ОСУ входит:
1. Видеоприёмник EACHINE EV800.
2. Пульт управления RadioMaster TX12 MKII с установленным радио модулем радиопередатчик TBS CROSSFIRE TX LITE 915 МГц.
3. Внешний аккумулятор (Power Bank) Hiper MX Pro 10000 мАч.
В состав ДСУ входит:
1. Ноутбук Irbis NB282.
2. Сумка для ноутбука Defender.
3. Видеоприёмник SIYI HM30.
4. Мобильный передатчик с антенной.
Предлагаемый МНРТК обладает инновационными модулями связи для управления на больших дистанциях, две аккумуляторные батареи в герметичных отсеках на 48 вольт, вследствие чего дает МНРТК до пяти часов работы, а также имеет быструю зарядку до ста процентов в течение трех часов. Два бесколлекторных мотора, мощностью 1500 ватт, которые разгоняют МНРТК с полезной нагрузкой до 25 км/ч. Имеют функцию рекуперации.
В центральном отсеке, сосредоточены две системы управления (дублирующая и основная), в состав дублирующей системы управления входит: Arduino MEGA 2560 (плата управления моторами связанная напрямую с контролерами моторов), Ebyte E22 Lora 170 T30D и Ebyte E22 Lora 433 T30D (цифровой модуль связи, использующий технологию Long Range). В состав основной системы управления входит: Ebyte E22 Lora 915 T30D.
Оператор имеет возможность управлять через основную или дублирующую систему управления.
Источники информации
1. Патент RU № 2364500 С2, В25J 5/00, опубликованный 20.08.2009 г.
2. Патент RU № 2548207 С1, F41H 7/00, опубликованный 20.04.2015 г.
3. Патент RU № 2533229 С2, B25J 5/00, опубликованный 20.11.2014.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильный роботехнический комплекс | 2024 |
|
RU2828909C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОЙ ЭВАКУАЦИИ НА БАЗЕ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2024 |
|
RU2838648C1 |
| Боевой модуль робототехнического комплекса с универсальным ложементом | 2024 |
|
RU2838709C1 |
| Способ и устройство для постановки минных заграждений | 2023 |
|
RU2834487C1 |
| СПОСОБ ПОСТАНОВКИ МИННЫХ ЗАГРАЖДЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2833085C1 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС С НОЖНИЧНЫМ ПОДЪЕМНИКОМ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2830637C1 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| Боевой модуль робототехнического комплекса военного назначения с устройством прерывания очереди при стрельбе из автоматического оружия | 2023 |
|
RU2831825C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ БОЕВЫХ ДЕЙСТВИЙ | 2013 |
|
RU2533229C2 |
| СПОСОБ РЕШЕНИЯ ОГНЕВОЙ ЗАДАЧИ ДИСТАНЦИОННО УПРАВЛЯЕМЫМ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ ВОЕННОГО НАЗНАЧЕНИЯ В АВТОНОМНОМ РЕЖИМЕ | 2024 |
|
RU2840168C1 |
Изобретение относится к самоходным транспортным средствам боевого применения. Многофункциональный наземный робототехнический комплекс содержит транспортное средство, систему связи и передачи данных и систему управления. Транспортное средство выполнено в виде универсальной платформы на гусеничном ходу, состоящей из корпуса с поплавковой подложкой, ходовой части, трансмиссии, силовой установки, источника питания, основной и дублирующей системы управления. Источник питания выполнен в виде двух аккумуляторных батарей, размещенных в герметичных отсеках. Универсальная платформа выполнена с широкой площадью соприкосновения и оснащена клиновидным бампером. Устройства крепления на корпусе выполнены универсальными под сменную пластину с возможностью установки нескольких модулей. На корпусе также размещено крепление для установки манипулятора, на конце которого прикреплен крюк с лебедкой на электроприводе. Достигается создание эффективного роботизированного комплекса высокой надежности с одновременным расширенным кругом задач боевого применения. 4 ил.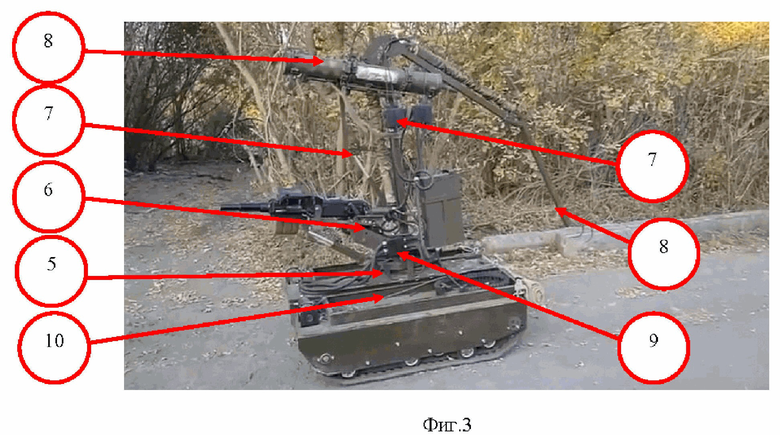
Многофункциональный наземный робототехнический комплекс, содержащий самодвижущее транспортное средство, систему связи и передачи данных и систему управления, различные функциональные модули, устанавливаемые в зависимости от планируемой боевой задачи, отличающийся тем, что самодвижущееся транспортное средство выполнено виде универсальной платформы на гусеничном ходу, состоящей из корпуса с поплавковой подложкой, ходовой части, трансмиссии, силовой установки, источника питания, основной и дублирующей системы управления, причем источник питания выполнен в виде двух аккумуляторных батарей, размещенных в герметичных отсеках, а блоки корпуса представляют собой комплекс сборочных единиц, предназначенных для размещения оборудования ходовой части, трансмиссии, силовой установки, систем управления, источника питания, при этом универсальная платформа выполнена с широкой площадью соприкосновения и оснащена клиновидным бампером для преодоления густорастущих зеленых насаждений и низкорастущих деревьев, позволяющей преодолевать заболоченные участки, а устройства крепления на корпусе выполнены универсальными под сменную пластину с возможностью установки нескольких модулей, а также на корпусе размещены крепление для установки манипулятора, на конце которого прикреплен крюк с лебедкой на электроприводе для эвакуации раненого из окопов и блиндажей и буксировочное сцепное приспособление с механизмом дистанционной сцепки.
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2364500C2 |
| МОБИЛЬНЫЙ МОДУЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2021 |
|
RU2771402C1 |
| US 4932831 A1, 12.06.1990 | |||
| Способ получения метилового эфира дихлоруксусной кислоты | 1955 |
|
SU103147A1 |
| CN 112744036 A, 04.05.2021 | |||
| CN 211844860 U, 03.11.2020 | |||
| CN 111251798 A, 09.06.2020. | |||

