Предлагаемый стенд относится к учебной технике и может быть использован для исследования параметров движения мобильных транспортных средств, управляемых за счет разности скоростей вращения ведущих колес.
Известны способы и устройства определения параметров движения транспортных средств, например устройство определения тормозного пути транспортного средства, описанное в патенте РФ №2157517, МПК G01M 17/007, которое содержит источник информации о движении транспортного средства, формирующий первую последовательность импульсов, генератор постоянной частоты, формирующий вторую последовательность импульсов, блок определения и запоминания сигнала «Начало торможения» (НТ), блок формирования сигнала «Торможение юзом» (ТЮ), инерционный децелерометр, связанный с блоком формирования кодов тормозного пути на участке юза, счетчик-сумматор и блок индикации, связанный с выходом счетчика-сумматора, который своими входами связан с выходами блока формирования сигнала ТЮ, с выходом и входом блока определения и запоминания сигнала НТ, вход которого подключен к первому входу блока формирования сигнала ТЮ и к выходу источника информации о движении транспортного средства, формирующего первую последовательность импульсов, а генератор постоянной частоты связан со вторым входом блока формирования сигнала ТЮ, при этом выход блока формирования кода тормозного пути на участке юза подключен к пятому входу счетчика-сумматора.
Основными недостатками устройства являются необходимость наличия реального транспортного средства, движущегося по дорогам разных типов с разными состояниями покрытий, что возможно при наличии только специальных автодромов.
Сократить временные и материальные затраты при исследовании параметров движения транспортных средств в процессе обучения преимущественно в учебных заведениях позволяет устройство, описанное в патенте РФ №2247961, МПК G01M 17/007, которое было принято за прототип. Изобретение-прототип содержит источник информации о движении транспортного средства, генератор постоянной частоты и децелерометр с блоком формирования кода тормозного пути на участке юза, выполненные в виде программных имитационных моделей, расположенных в памяти компьютера, блок определения и запоминания сигнала «Начало торможения», блок формирования сигнала «Торможение юзом», счетчик-сумматор и блок индикации. На стенде задаются различные типы дорожных покрытий и состояния покрытий, различные скорости и траектории торможения. Обеспечивается возможность наблюдения и фиксации изменения тормозного пути для расчета тормозных характеристик транспортных средств.
К недостаткам прототипа относятся отсутствие реальной физической модели транспортного средства, что снижает адекватность моделирования ввиду невозможности учета всех характеристик физического объекта в программных имитационных моделях, и отсутствие возможности отслеживания траектории движения, по которой двигалось бы транспортное средство, находясь на площади автодрома, и определения других параметров движения, таких как продольное и боковое отклонение мобильного транспортного средства от заданной траектории.
Целью изобретения является создание стенда, позволяющего проводить исследования динамики робокара на неподвижной стационарной установке, что не требует наличия специальных автодромов.
Предложено изобретение, которое сочетает достоинство программного имитационного моделирования, заключающееся в отсутствии необходимости наличия специальных автодромов, и достоинство физического моделирования, заключающееся в наличии реального физического объекта управления, наиболее полно учитывающего кинематику и динамику движения мобильного транспортного средства и позволяющего проводить исследования, связанные с точностью отслеживания заданной траектории, позиционированием, влиянием состояния покрытия на тормозной путь и т.п.
Существенными признаками, отличающимися от известных устройств и способов определения параметров движения технических средств, является наличие двух круговых платформ, установленных на вертикальных осях и допускающих свободное вращательное движение, что позволяет осуществлять движение двух приводных колес робокара, благодаря чему имитируется кажущееся движение робокара по автодрому, причем траектория этого движения может задаваться заранее произвольным образом с помощью ПЭВМ верхнего уровня. Кроме того, отличительной особенностью является введение в структуру системы управления программно-аппаратного комплекса, состоящего из бортового контроллера, ПЭВМ верхнего уровня с устройствами сопряжения и ввода-вывода, через которые осуществляется обмен информацией с датчиками и исполнительными элементами в виде электрических двигателей постоянного тока с редукторами. Как видно, предложенный стенд существенно снижает затраты на проведение исследований динамики робокара, поскольку не требует наличия специального автодрома со светоотражательными полосами или высокочастотными электрическими кабелями, задающими траекторию движения.
Предлагаемый способ исследования процесса управления робокаром использует вместо реальной траектории, указанной выше, виртуальную траекторию, задаваемую на мониторе. При этом имеется возможность изменения в процессе исследования конфигурации виртуальной траектории и внесения коррекции в расчетные значения радиусов поворотов, скоростей движения на прямолинейных участках движения и на поворотах, расстояний до мест позиционирования, определяющих моменты начала торможения робокара для различных законов управления, применяемых в бортовой системе.
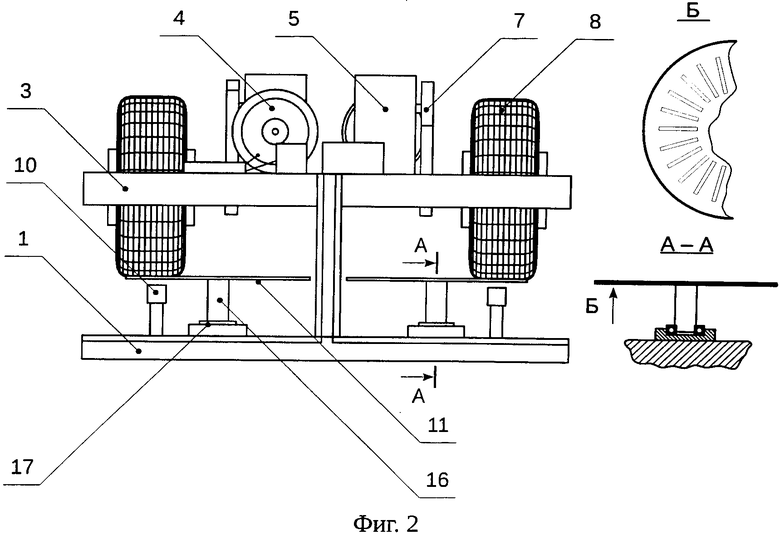
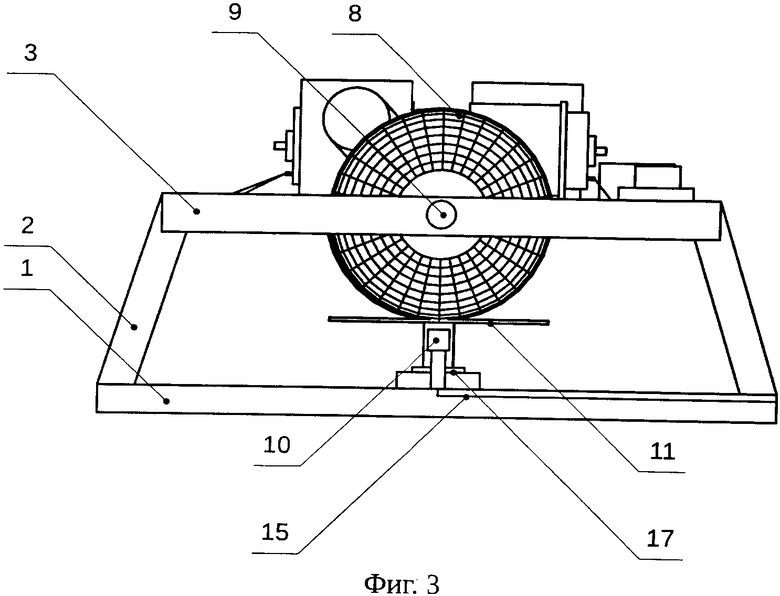
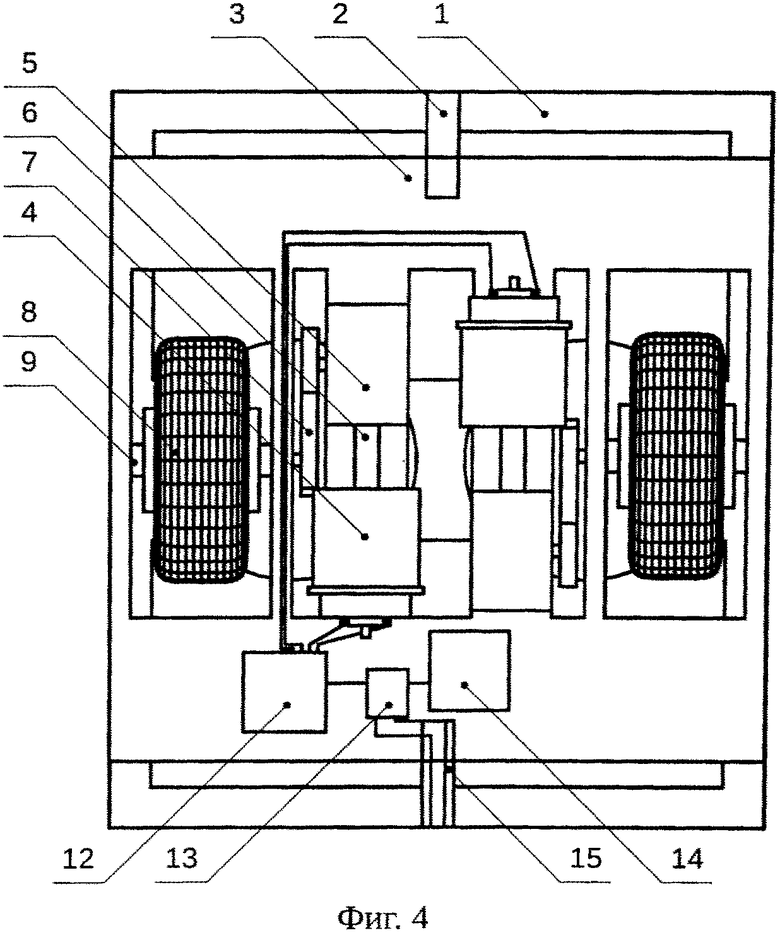
Общий вид конструкции стенда представлен на фиг.1, а виды спереди, сбоку и сверху - на фиг.2-4. Конструкция стенда представляет собой платформу 3, установленную стационарно на осях 9 двух приводных колес 8 и опирающуюся на две наклонные стойки 2, закрепленные своим нижним концом на раме 1 и расположенные по ромбовидной схеме по отношению к ведущим колесам. Колеса опираются на соответствующие круговые платформы 11, жестко закрепленные в своих центрах на вертикальных осях 16, установленных нижними концами в опорные подшипники 17, неподвижно соединенные с рамой. При этом на каждой вертикальной стойке, расположенной под круговой платформой, на нижней плоскости которой по окружности нанесены светоотражательные полоски, устанавливаются датчики угловой скорости 10 непосредственно под серединой ширины шины колеса, воспринимающие отраженный световой поток от полосок. Ось вращения каждого колеса с помощью цепной передачи 7, входящей в состав редуктора, соединена каждая со своим выходным валом редукторов 5, входной вал каждого из которых жестко сцеплен с валом 6 соответствующего двигателя постоянного тока 4. Якорные обмотки двигателей связаны посредством устройства сопряжения 12 через устройство ввода-вывода 13 с бортовым контроллером 14. Также через устройство ввода-вывода вход бортового контроллера соединен с датчиками угловой скорости. В качестве физической среды передачи электрических сигналов используются соединительные провода 15.
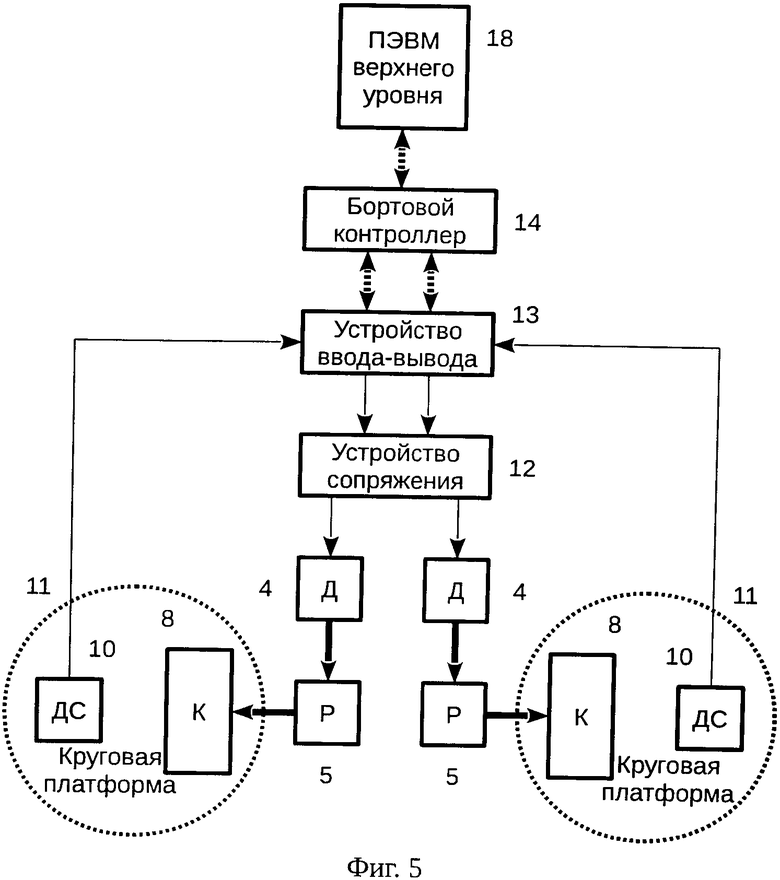
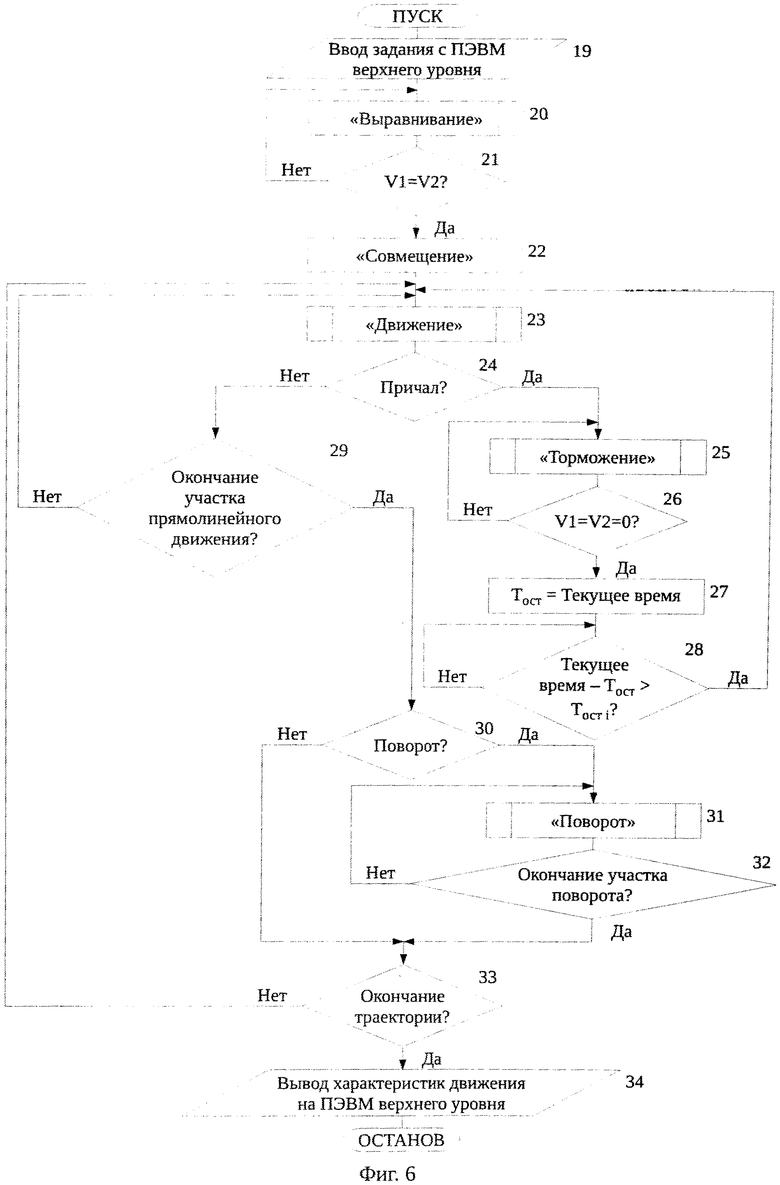
Принцип действия стенда поясняет функциональная схема стенда (фиг.5) и блок-схема функционирования бортового контроллера (фиг.6).
Начало движения. Требуемая траектория движения робокара задается на ПЭВМ верхнего уровня путем ее построения на мониторе с использованием графического интерфейса программы «Задание траектории». Координаты точек заданной траектории передаются с ПЭВМ 18 в бортовой контроллер (блок 19 фиг.6). В начальный момент времени происходит запуск обоих двигателей 4, приводящих во вращение редукторы 5, от сигнала контроллера 14, поступающего через устройство ввода-вывода 13 и устройство сопряжения 12, причем осуществляется выравнивание скоростей вращения колес 8 путем использования информации с датчиков угловой скорости 10 и реализации подпрограммы «Выравнивание» (блоки 20, 21 фиг.6). Затем осуществляется совмещение координат виртуального движения и начальной точки на линейном участке заданной траектории - подпрограмма «Совмещение» (блок 22 фиг.6).
Движение. Далее включается программа «Движение» (блок 23 фиг.6). На основе информации, получаемой от датчиков угловой скорости и математической модели динамики транспортного средства, включающей электропривод и выбранный закон управления из заданного множества, имеющегося в ПЭВМ верхнего уровня, подпрограмма «Движение» обеспечивает определение пути, проходимого каждым колесом, и расчет траектории, отображаемой на мониторе относительно заданной. Кроме того, определяется ошибка рассогласования траекторий в каждый момент времени, на основе которой контроллер формирует в соответствии с выбранным законом управления управляющие воздействия, подаваемые на электроприводы колес через устройство ввода-вывода и устройство сопряжения. В соответствии с управляющими воздействиями происходит изменение скоростей вращения колес таким образом, чтобы ошибка рассогласования снижалась за счет разности длины путей, проходимых колесами за один и тот же промежуток времени.
Торможение. Для каждого прямолинейного участка движения могут быть определены одна или несколько точек позиционирования (блок 24 фиг.6), имитирующих останов робокара у технологических причалов для выполнения меняющих общую массу транспортной тележки действий загрузки или выгрузки сырья, оборудования, готовых изделий и т.п. При подходе робокара к очередной точке позиционирования на расстояние, заданное в алгоритме управления, включается программа «Торможение» (блоки 25, 26 фиг.6), обеспечивающая остановку робокара в точке позиционирования с наименьшим продольным отклонением для текущей массы транспортной тележки и заданного дорожного покрытия, которое имитируется путем установки поверх круговых платформ пар сменных плоских дисков, имеющих соответствующий дорожному покрытию тип поверхности и жестко сцепляемых с платформами. По окончанию заданной продолжительности времени (блоки 27, 28 фиг.6), достаточной для выполнения загрузочных или разгрузочных операций, осуществляемых после полного останова робокара, происходит разгон по прямой, и управление передается программе «Движение».
Отработка поворотов. Передавая контроллеру информацию о заданной траектории, состоящей из участков движения по прямой типа «прямолинейное движение» и участков движения по дуге окружности заданного радиуса на заданный угол, имитируя «поворот», в виде координат точек, принадлежащих траектории, ПЭВМ верхнего уровня выдает информацию о точках окончания (блок 29 фиг.6) каждого прямолинейного участка и начала участка поворота (блок 30 фиг.6). При достижении точки начала поворота начинает работать программа «Поворот» (блоки 31, 32 фиг.6), в которой происходит выбор допустимой линейной скорости движения по дуге и расчет разности скоростей вращения колес робокара, обеспечивающей движение по окружности заданного радиуса. Линейная скорость движения, с которой робокар проходит поворот при исследуемом алгоритме (законе) управления, сохраняется в базе данных контроллера, и если при этом не возникла неустранимая ошибка рассогласования между заданной траекторией движения и виртуальной пройденной робокаром траекторией, т.е. при заданном алгоритме управления робокар не перешел в неустойчивый режим движения, то при следующем испытании алгоритма управления для той же траектории движения на рассматриваемом повороте допустимая линейная скорость движения увеличивается.
Исследование эффективности законов управления. Помимо отображения траектории виртуального движения робокара на мониторе ПЭВМ верхнего уровня выводятся значения параметров, рассчитываемых на каждом шаге моделирования в программах «Движение», «Поворот» и «Торможение» для заданного дорожного покрытия, массы транспортной тележки и выбранного алгоритма (закона) управления, такие как:
- ошибка рассогласования заданной и виртуальной траектории движения в текущий момент времени, т.е. текущее боковое отклонение;
- максимальное боковое отклонение;
- максимальная допустимая скорость прохождения каждого поворота заданной траектории;
- средняя точность и среднее время позиционирования у технологических причалов.
Окончание движения. По достижению окончания заданной траектории (блок 33 фиг.6) вышеперечисленные параметры и отработанная виртуальная траектория движения, соответствующая заданной траектории при использовании выбранного алгоритма управления, массы робокара и дорожного покрытия, передаются ПЭВМ верхнего уровня (блок 34 фиг.6), где происходит их сохранение в памяти для сравнения с виртуальными траекториями движения и параметрами, получаемыми в последующих экспериментах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ДВИЖЕНИЯ НАГРУЖЕННОГО МОБИЛЬНОГО РОБОТА ПРИ НАЛИЧИИ ПРОСКАЛЬЗЫВАНИЯ КОЛЁС | 2017 |
|
RU2670352C1 |
| Способ испытания мобильных боевых робототехнических комплексов и стенд для его осуществления | 2016 |
|
RU2630860C1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2247961C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ СОРТИРОВОЧНЫХ СТАНЦИЙ | 2009 |
|
RU2401217C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| МОБИЛЬНЫЙ СТЕНД ДЛЯ ИСПЫТАНИЯ ШИНЫ И СПОСОБ ЕЕ ИСПЫТАНИЯ НА СТЕНДЕ | 2005 |
|
RU2372600C2 |
| ТОРМОЗНАЯ СИСТЕМА МНОГОКОЛЕСНОГО САМОЛЕТА И СПОСОБ УПРАВЛЕНИЯ ЭТОЙ СИСТЕМОЙ | 1995 |
|
RU2146625C1 |
| Способ адаптивного управления автоматической подачей песка под колеса локомотива | 2022 |
|
RU2780751C1 |
| ДИНАМИЧЕСКИЙ ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2014 |
|
RU2554198C1 |
Группа изобретений относится к учебной технике, может быть использована для исследования динамики мобильных транспортных средств, управляемых за счет разности скоростей вращения ведущих колес. Стенд для исследования движения робокара представляет собой платформу, установленную стационарно на осях двух колес, приводимых во вращение двигателями, управляемыми бортовым контроллером путем гибко задаваемого алгоритма (закона) управления. Виртуальная траектория движения робокара, получаемая при помощи датчиков скоростей вращения круговых платформ, на которые опираются колеса, с учетом математической модели динамики платформы, электропривода и закона управления, отображается на мониторе персональной электронно-вычислительной машины, связанной с контроллером, относительно положения задаваемой в процессе исследования кинематической траектории, также отображаемой на мониторе. Способ исследования процесса управления робокаром основан на сравнении заданной траектории движения с реальной траекторией при различных законах управления и содержит стенд для исследования движения. Достигается возможность проводить исследования динамики робокара на неподвижной стационарной установке. 2 н.п. ф-лы, 6 ил.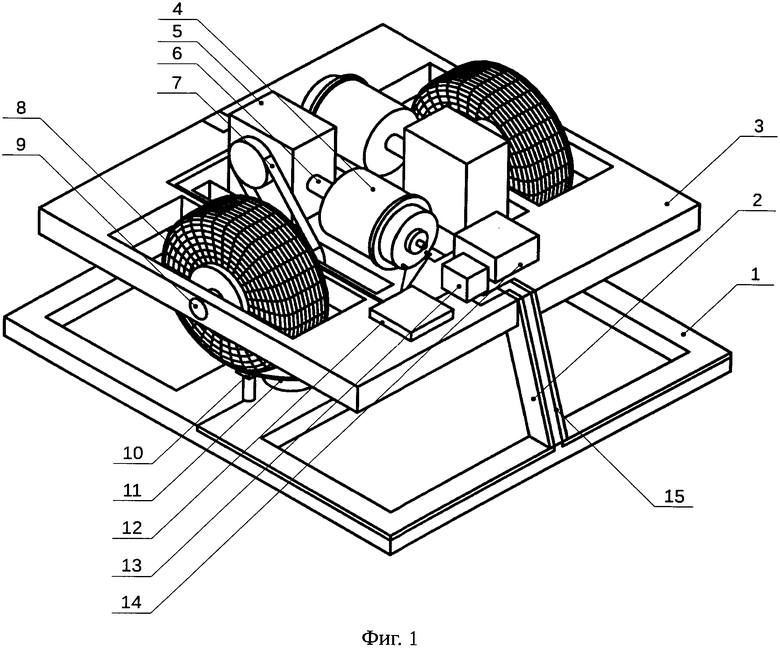
1. Стенд для исследования движения робокара, состоящий из платформы, установленной стационарно на осях двух приводных колес, каждое из которых соединено через редукторы с валами электрических двигателей постоянного тока, якори которых связаны посредством устройства сопряжения с выходом бортового контроллера, отличающийся тем, что платформа опирается на две наклонные стойки, закрепленные своими нижними концами на раме и расположенные по ромбовидной схеме по отношению к ведущим колесам, опирающимся на соответствующие круговые платформы, жестко закрепленные в своих центрах на вертикальных осях, установленных нижними концами в опорные подшипники, неподвижно соединенные с рамой, при этом под каждой круговой платформой с нанесенными по окружности на ее нижней плоскости светоотражательными полосками устанавливаются на вертикальных стойках, закрепленных на раме, датчики угловой скорости с выходами, связанными через устройство ввода-вывода с входом бортового контроллера, выход которого соединен с персональной электронно-вычислительной машиной верхнего уровня, связанной с компьютерной сетью, и с устройством сопряжения посредством устройства ввода-вывода, все электрические элементы бортовой системы управления по цепи питания соединены с блоком питания.
2. Способ исследования процесса управления робокаром с использованием стенда по п.1, основанный на сравнении заданной кинематической траектории его движения с реальной траекторией при различных законах управления, получаемой под действием управляющих воздействий, формируемых бортовой системой управления, отличающийся тем, что реальная траектория движения отображается виртуально на мониторе персональной электронно-вычислительной машины верхнего уровня на основе информации, получаемой от датчиков угловой скорости вращения круговых платформ, приводимых в движение правым и левым колесами робокара, и используемой для расчета координат местоположения робокара в текущий момент времени, которые определяют виртуальную траекторию, на основе программно реализованной в контроллере математической модели, описывающей динамику транспортного средства с электроприводом и гибким алгоритмом управления, допускающим изменение в процессе исследования, в результате чего сформированная виртуальная траектория реального движения робокара отображается относительно заданной траектории, также изображенной на экране монитора на основе введенных данных в запоминающее устройство персональной электронно-вычислительной машины верхнего уровня, которая определяет значения их отклонений одной от другой в каждый момент времени, являющихся основой для формирования управляющего воздействия, направленного на ликвидацию отклонения между траекториями.
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2247961C1 |
| Стенд для динамических испытаний силового привода транспортного средства | 1988 |
|
SU1665254A1 |
| CN 202501986 U, 24.10.2012 | |||
| KR 20130008248 A, 22.01.2013 | |||

