Изобретение относится к области авиастроения летательных аппаратов (ЛА) типа многовинтовых вертолетов (мультикоптер).
Известны мультикоптеры, которые имеют 4 и более винтомоторных групп (ВМГ), которые располагаются по окружности на радиально расходящихся балках (фиг. 1).
Наиболее близким по технической сущности является существующий мультикоптер - многовинтовой вертолет от компании E-Volo, который имеет восемнадцать винтомоторных групп (фиг. 1).
Недостатком указанного мультикоптера является сложность технического исполнения, так как винтомоторные группы располагаются на радиально расположенных балках. Это усложняет крепеж всей конструкции, усложняет обеспечение надежности конструкции, ограничивает возможность наращивания мощности, грузоподъемности и ограничивает возможности многоцелевого применения ЛА.
Техническими результатами изобретения мультикоптера с линейным расположением винтомоторных групп являются:
1. Надежность конструкции данного ЛА;
2. Возможность создавать мультикоптеры разной грузоподъемности без усложнения конструкции, например, с полезной нагрузкой 50, 150, 250, 500 и т.д. килограмм;
3. Возможность создавать мультикоптеры различного целевого назначения: пассажирский, грузовой, комбинированный, а также многоцелевой военный ЛА;
4. Простота пилотирования как дистанционно, так и непосредственное ручное управление и с земли, и с ЛА, и это не требует специальной подготовки;
5. Простота эксплуатации аппарата;
6. Безопасность полета при установке не менее 18 винтомоторных групп;
7. Возможность использования ветра для зарядки аккумуляторов при посадке в районе, удаленном от электроснабжения, что делает ЛА незаменимым в районах тундры, степей, пустынь и других открытых, малонаселенных районов;
8. Простота эксплуатации и простота управления ЛА делают его незаменимым в личном хозяйстве и на малых предприятиях.
Сущность изобретения поясняется рисунками, на которых изображено: на фиг. 1 - существующий мультикоптер - многовинтовой вертолет от компании E-Volo, на фиг. 2 - предлагаемый мультикоптер с линейным расположением винтомоторных групп. В данном случае видно, что 18 винтомоторных групп располагаются в 4 линии по одному ВМГ на оконечностях каждой поперечной балки.
Данный технический результат в мультикоптере достигается путем использования многовинтовой платформы винтомоторных групп и отличается тем, что электромоторы располагаются линиями, вытянутыми вдоль направления полета для чего конструкция мультикоптера содержит платформа винтомоторных групп из продольных силовых балок(лонжеронов), расположенных вдоль полета, к лонжеронам крепятся поперечные силовые балки, на оконечностях которых устанавливаются электромоторы с несущими воздушными винтами по одному на оконечностях каждой поперечной балки, снизу к платформе винтомоторных групп прикрепляется грузопассажирская кабина с пакетами аккумуляторов, при этом количество винтомоторных установок должно обеспечивать грузоподъемность мультикоптера в вариантах воздушного робота, воздушного мотоцикла, микроавтомобиля, грузотакси, автобуса, боевой машины пехоты и пр., но не менее 9 пар (18 винтомоторных групп) для надежности аварийной посадки при отказе до 4-х электродвигателей одновременно.
Мультикоптер с линейным расположением винтомоторных групп работает следующим образом (фиг. 2): винтомоторные группы 1, расположенные на оконечностях поперечных силовых балок 2, прилагают к ним силу тяги вверх. Далее суммарное усилие вверх от всех поперечных силовых балок передается к продольным балкам (лонжеронам) 3, к которым в свою очередь прикреплена грузопассажирская кабина 4. Таким образом, создана платформа винтомоторных групп, где к расположенным в направлении полета продольным балкам (лонжеронам) 3 крепятся поперечные балки 2, на которых установлены винтомоторные группы 1.
Расположение грузопассажирской кабины и аккумуляторов под платформой винтомоторных групп обеспечивают мультикоптеру поперечную и продольную устойчивость.
Каждая пара электродвигателей, которая находится на одной поперечной балке, питается от отдельного пакета аккумуляторов.
Данное инженерно-конструкторское решение позволяет создавать мультикоптеры разной грузоподъемности без усложнения конструкции например с полезной нагрузкой 50, 150, 250, 500 и т.д. килограмм, создавать мультикоптеры различного целевого назначения.
Управление полетом принципиально происходит так же, как при радиальном расположении ВМГ. При увеличении оборотов задних ВМГ и уменьшении на передних мультикоптер движется вперед. При манипулировании левой и правой группами мультикоптер будет двигаться вправо или влево. Особое программное управление винтами позволяет разворачивать ЛА, менять курс, менять скорость и высоту. Бортовой навигационно-пилотажный комплекс позволяет данному летательному аппарату выполнять полет по программе, а так же управлять автопилотом вручную как с земли, так и с борта этого летательного аппарата.
Источники информации
1. http://el-shema.ru/publ/radiosvjaz/multikoptery/4-1-0-72 - Слово «мультикоптер» означает «мульти» - много, «коптер»- винт … это дистанционно управляемый летательный аппарат … сфера применения очень широкая.
2. http://nauka21vek.ru/archives/35512 - Многовинтовой вертолет от компании Е-Volo. E-Volo предлагает другой подход: просто надо заменить два винта восемнадцатью.
3. http://wvvw.rc-modeli.ru/shop/helicopters_4 - Мультикоптер - это очень стабильный многомоторный летательный аппарат для развлечений или дела. Количество моторов обычно от 3 до 12.
4. http://www.multicopter.ru/faststart - Строим мультикоптер сами - шаг за шагом.
5. http://motorpuls.ru/aviation/8752 - Маневрирование изменением скорости вращения винтов.
6. http://multicopter.ru/mierocopter - Конструкция и принцип действия микрокоптера.
7. http://www.freepatent.ru/patents/2500577 - Многовинтовой вертолет (патент РФ №2500577).
8.http://pikabu.ru/story/vse_o_vertoletakh_chast_3_vertoletyi_mnogovmtovoy_skhemyi_1486375 - Многовинтовая схема - преимущества и недостатки.
9. http://www.computerra.ru/76115/geksagonalnyie-robotyi-sobirayutsya-v-bolshoy-mnogovmtovoy-vertolyot-sami/ - Исследователи из Швейцарской высшей технической школы Цюриха сделали модульных роботов, которые могут сами собираться в многовинтовой вертолет.
| название | год | авторы | номер документа |
|---|---|---|---|
| Летательный аппарат короткого взлета и посадки с газодинамическим управлением | 2018 |
|
RU2711633C2 |
| Малогабаритный летательный аппарат (ЛА) вертикального взлета/посадки с увеличенной дальностью полета | 2017 |
|
RU2681464C1 |
| УНИВЕРСАЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КВАДРОКОПТЕРНОГО ТИПА | 2024 |
|
RU2835704C1 |
| МУЛЬТИКОПТЕР С ВОЗДУШНЫМИ ВИНТАМИ КОМБИНИРОВАННОГО НАЗНАЧЕНИЯ И ГИБРИДНОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ ВИНТОМОТОРНЫХ ГРУПП | 2022 |
|
RU2803214C1 |
| РАМА МУЛЬТИКОПТЕРА (ВАРИАНТЫ) | 2017 |
|
RU2657650C1 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| Мультикоптер с полноповоротным рулем направления, гибридной двигательной установкой и комбинированными винтомоторными группами | 2023 |
|
RU2831361C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ И/ИЛИ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ С УКОРОЧЕННЫМ ПРОБЕГОМ | 2021 |
|
RU2764311C1 |
| Автожир | 2018 |
|
RU2673933C1 |
| МУЛЬТИКОПТЕР С ДВУХЪЯРУСНЫМ РАСПОЛОЖЕНИЕМ ВИНТОМОТОРНЫХ ГРУПП | 2021 |
|
RU2766284C1 |
Изобретение относится к области авиации, в частности к конструкциям многовинтовых летательных аппаратов. Мультикоптер с линейным расположением винтомоторных групп содержит платформу винтомоторных групп из продольных силовых балок - лонжеронов, расположенных вдоль полета. К лонжеронам крепятся поперечные силовые балки, на оконечностях которых устанавливаются электромоторы с несущими воздушными винтами, по одному на оконечностях каждой поперечной балки. Снизу к платформе винтомоторных групп прикрепляется грузопассажирская кабина с пакетами аккумуляторов. Количество винтомоторных установок должно обеспечивать необходимую грузоподъемность, но не менее 9 пар (18 винтомоторных групп) для надежности аварийной посадки при отказе до 4-х электродвигателей одновременно. Достигается возможность создания мультикоптеров различной грузоподъемности и разного назначения и повышается безопасность полета. 2 ил.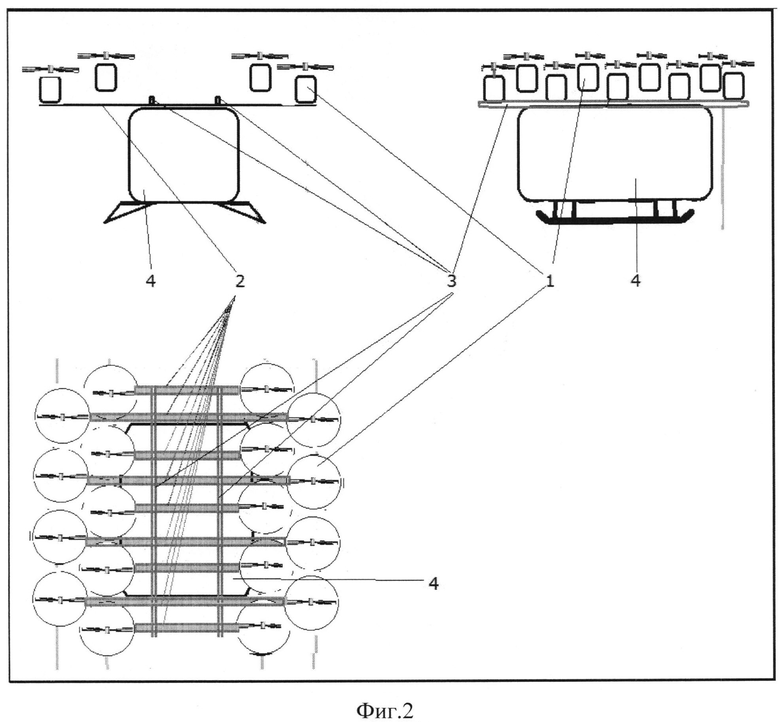
Мультикоптер с линейным расположением винтомоторных групп, отличающийся тем, что электромоторы располагаются линиями, вытянутыми вдоль направления полета, для чего конструкция мультикоптера содержит платформу винтомоторных групп из продольных силовых балок - лонжеронов, расположенных вдоль полета, к лонжеронам крепятся поперечные силовые балки, на оконечностях которых устанавливаются электромоторы с несущими воздушными винтами, по одному на оконечностях каждой поперечной балки, снизу к платформе винтомоторных групп прикрепляется грузопассажирская кабина с пакетами аккумуляторов, при этом количество винтомоторных установок должно обеспечивать грузоподъемность мультикоптера в вариантах воздушного робота, воздушного мотоцикла, микроавтомобиля, грузотакси, автобуса, боевой машины пехоты и пр., но не менее 9 пар (18 винтомоторных групп) для надежности аварийной посадки при отказе до 4-х электродвигателей одновременно.
| WO 2012035025 A2, 22.03.2012 | |||
| СИСТЕМА ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВКИ ПО ВОЗДУХУ ТЯЖЕЛЫХ ГРУЗОВ | 2010 |
|
RU2449924C1 |
| DE 202013004664 U1, 12.07.2013 | |||
| DE 102012202698 A1, 22.08.2013. | |||

