ОБЛАСТЬ ТЕХНИКИ
[0001] Варианты реализации настоящего описания относятся, в общем, к обтекаемым газогидродинамическим поверхностям. Более конкретно, варианты реализации настоящего описания относятся к улучшению газогидродинамических характеристик обтекаемых газогидродинамических поверхностей.
УРОВЕНЬ ТЕХНИКИ
[0002] Вертолеты имеют ограничения скорости движения вперед, в основном вследствие и по причине «срыва потока на отступающей лопасти» по мере достижения вертолетом своей максимальной скорости движения вперед. При срыве потока на отступающей лопасти и прекращении ею создания достаточной подъемной силы, для вертолета может возникнуть неоптимальный аэродинамический режим работы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] В настоящем описании раскрыты способы и система лопасти несущего винта винтокрылого летательного аппарата с улучшенными летно-техническими характеристиками. Лопасть несущего винта содержит внутреннюю часть лопасти и по меньшей мере одну управляемую поверхность, соединенную с внутренней частью лопасти. Управляемая поверхность выполнена с возможностью увеличения подъемной силы внутренней части лопасти путем изменения угла атаки внутренней части лопасти независимо от лопасти несущего винта.
[0004] Таким образом, различные варианты реализации настоящего описания устраняют или снижают влияние срыва потока на отступающей лопасти несущего винта и повышают скорость движения вперед вертолета. Таким образом подъемные характеристики на стороне вертолета увеличивают повышающуюся скорость движения вперед вертолета.
[0005] В варианте реализации система лопасти несущего винта винтокрылого летательного аппарата с улучшенными летно-техническими характеристиками содержит лопасть несущего винта и по меньшей мере одну управляемую поверхность. Лопасть несущего винта содержит внутреннюю часть лопасти.
Управляемая поверхность соединена с внутренней частью лопасти и улучшает подъемную силу внутренней части лопасти посредством изменения угла атаки внутренней части лопасти, независимой от лопасти несущего винта.
[0006] В другом варианте реализации способ функционирования системы лопасти несущего винта винтокрылого летательного аппарата с улучшенными летно-техническими характеристиками для снижения влияния срыва потока на отступающей лопасти несущего винта включает выявление высокой направленной скорости винтокрылого летательного аппарата, содержащего лопасть несущего винта.
Способ дополнительно включает развертывание по меньшей мере одной управляемой поверхности, соединенной с внутренней частью лопасти несущего винта, расположенной в области низкой скорости лопасти несущего винта.
[0007] В дополнительном варианте реализации способ создания лопасти несущего винта обеспечивает создание лопасти несущего винта, содержащей внутреннюю часть лопасти. Способ дополнительно обеспечивает создание по меньшей мере одной управляемой поверхности, соединенной с внутренней частью лопасти и выполненной с возможностью улучшения подъемной силы внутренней части лопасти путем управления углом атаки внутренней части лопасти независимо от лопасти несущего винта.
[0008] Данная сущность изобретения приведена для ознакомления с набором концепций в упрощенной форме, которые дополнительно раскрыты в приведенном ниже подробном описании. Такая сущность изобретения не предназначена для определения ключевых или существенных признаков заявленного объекта, а также не предназначена для использования в качестве средства для определения объема заявленного объекта.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0009] Более полное понимание вариантов реализации настоящего описания может быть получено при изучении подробного описания и формулы изобретения, совместно со следующими чертежами, на которых одинаковые ссылочные номера обозначают подобные элементы. Данные чертежи приведены для облегчения понимания настоящего описания, не ограничивая степень, объем, масштаб или применимость настоящего описания. Чертежи не обязательно выполнены в масштабе.
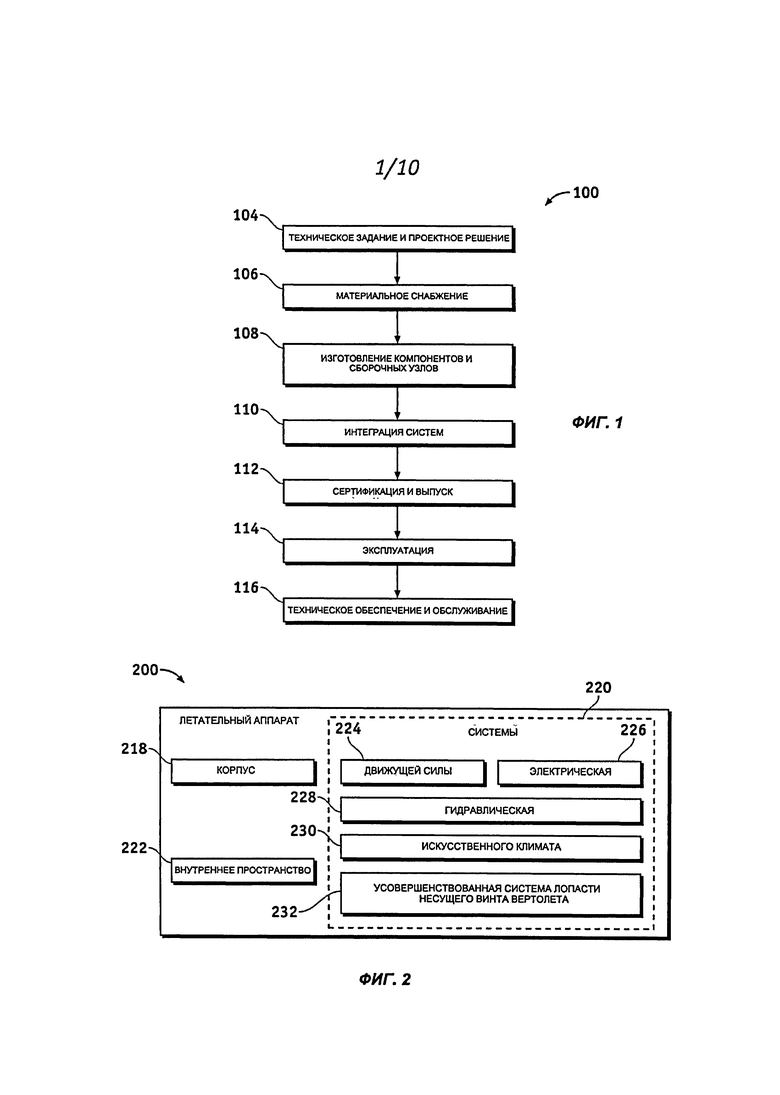
[0010] На фиг. 1 изображена схема последовательности операций типовой методики производства и обслуживания летательного аппарата.
[0011] На фиг. 2 изображена типовая блок-схема летательного аппарата.
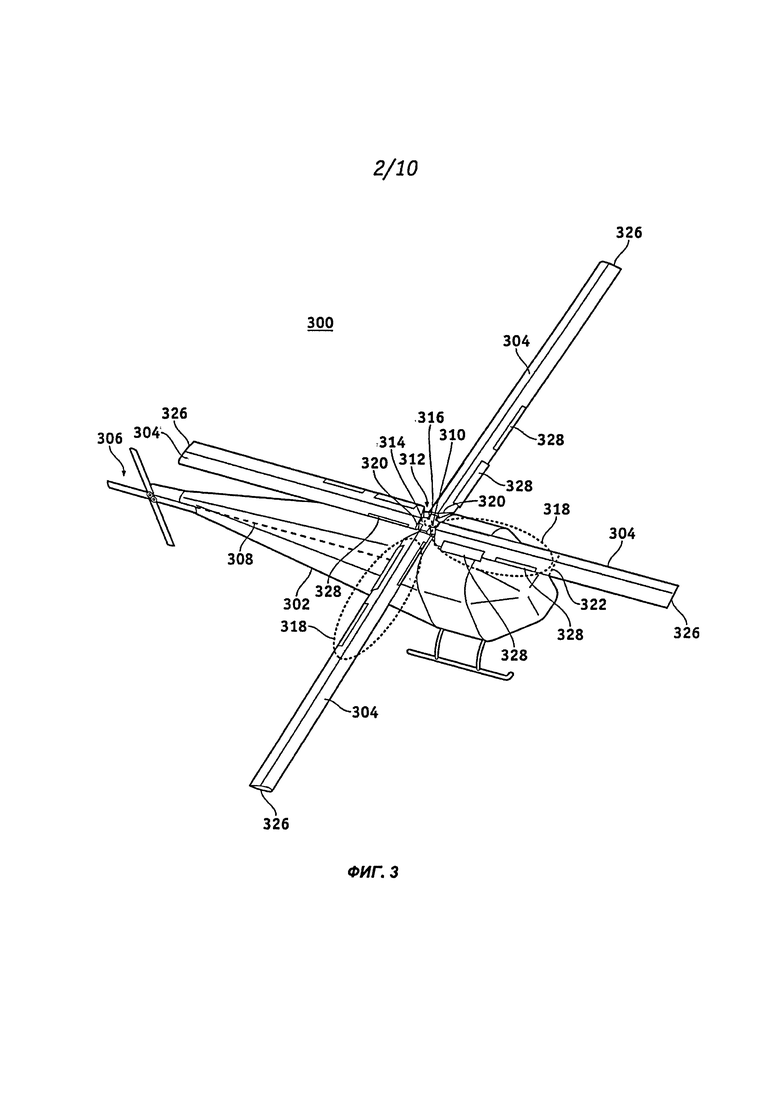
[0012] На фиг. 3 изображен вид в перспективе типового несущего винта вертолета согласно варианту реализации настоящего описания.
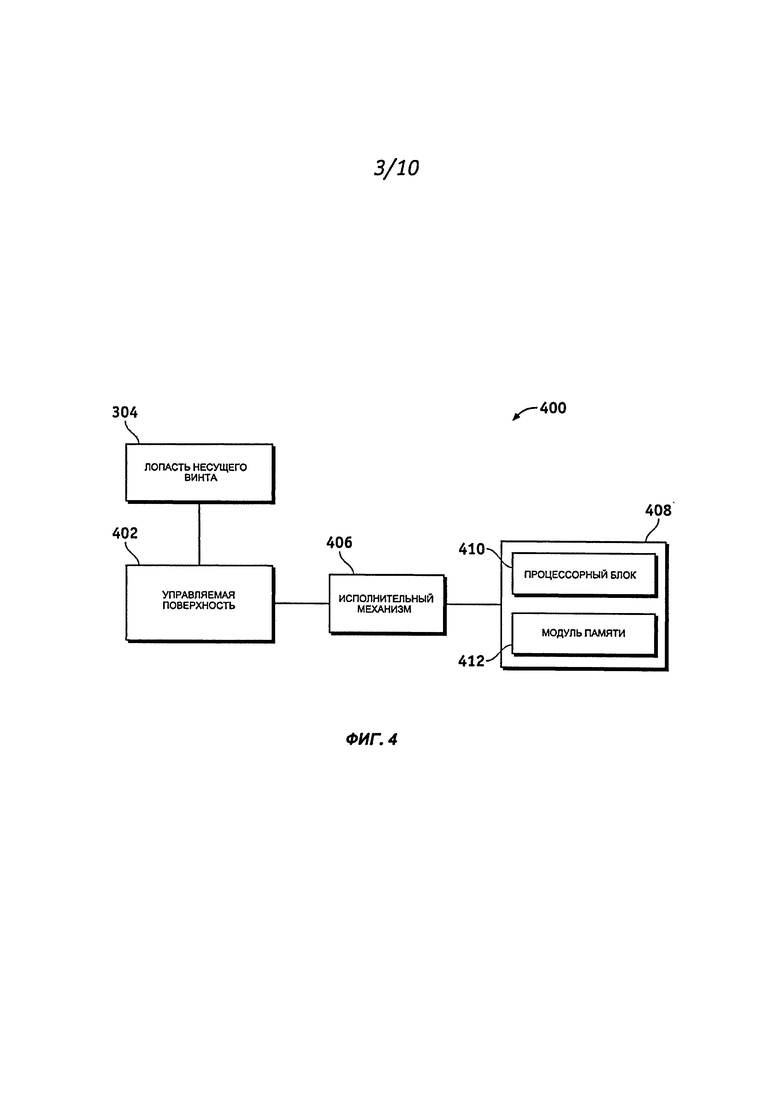
[0013] На фиг. 4 изображена типовая функциональная блок-схема системы лопасти несущего винта винтокрылого летательного аппарата с улучшенными летно-техническими характеристиками согласно варианту реализации настоящего описания.
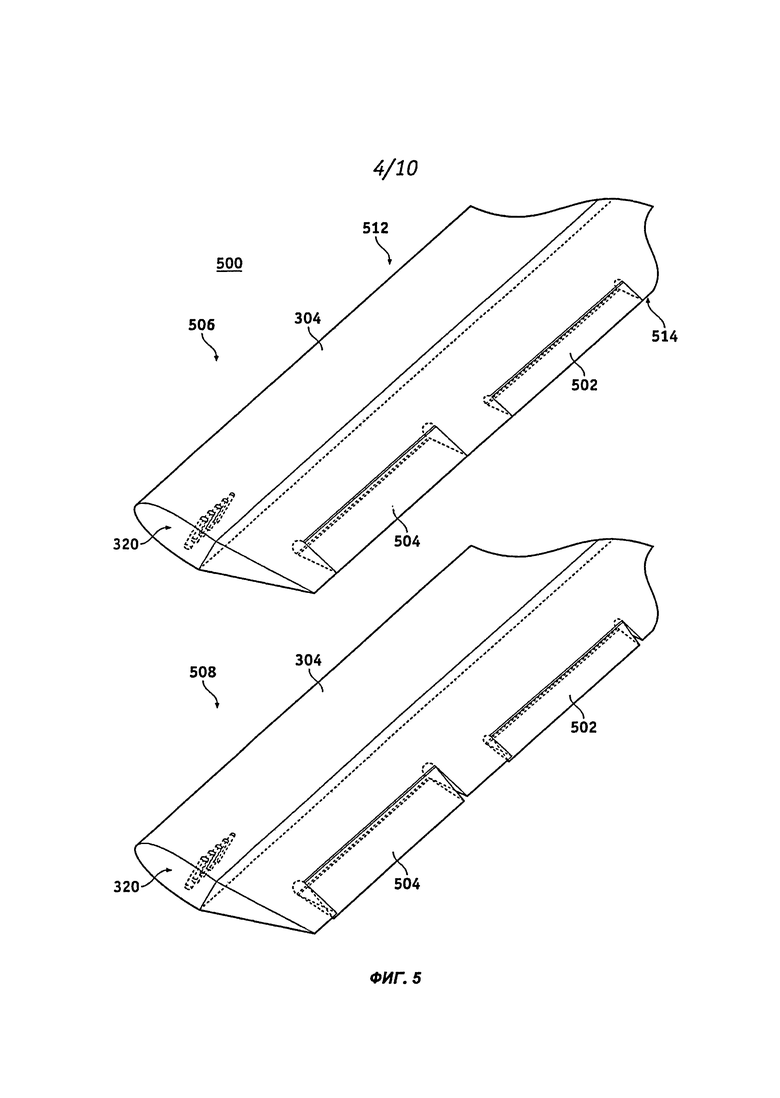
[0014] На фиг. 5 изображен типовой вид в перспективе структуры лопасти несущего винта, содержащей закрылки задней кромки в качестве управляемых поверхностей согласно варианту реализации настоящего описания.
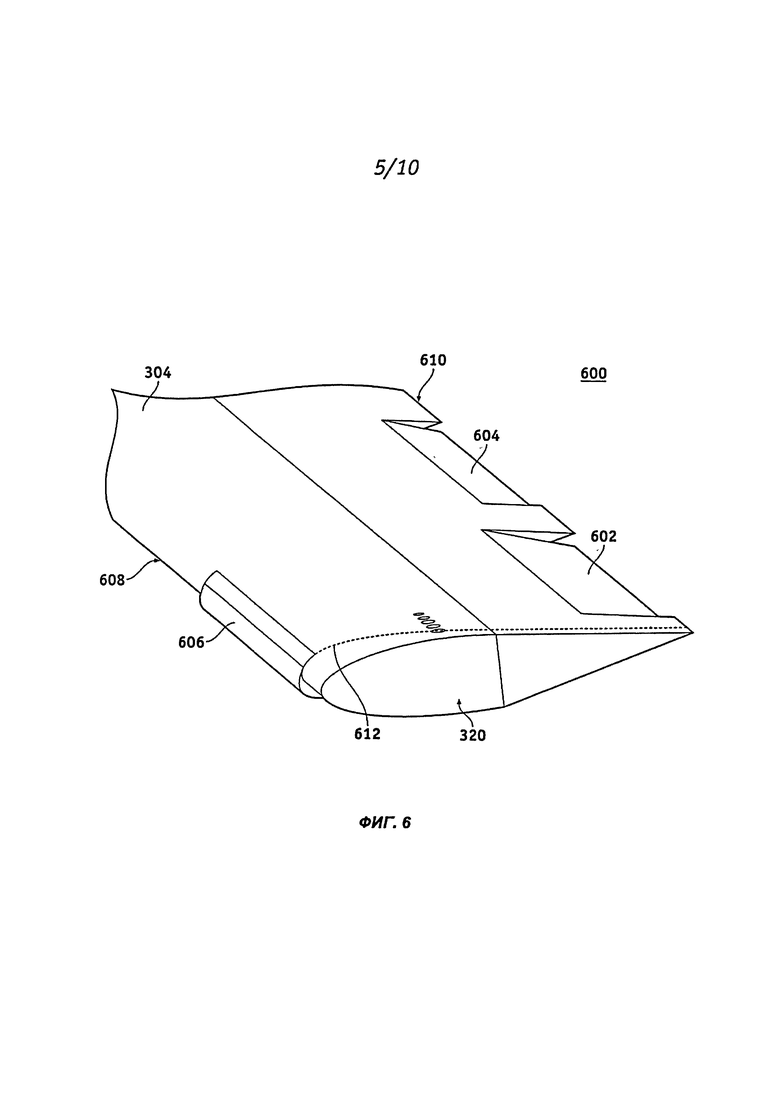
[0015] На фиг. 6 изображен типовой вид в перспективе структуры лопасти несущего винта, содержащей закрылки задней кромки и поверхность управления передней кромки в качестве управляемых поверхностей согласно варианту реализации настоящего описания.
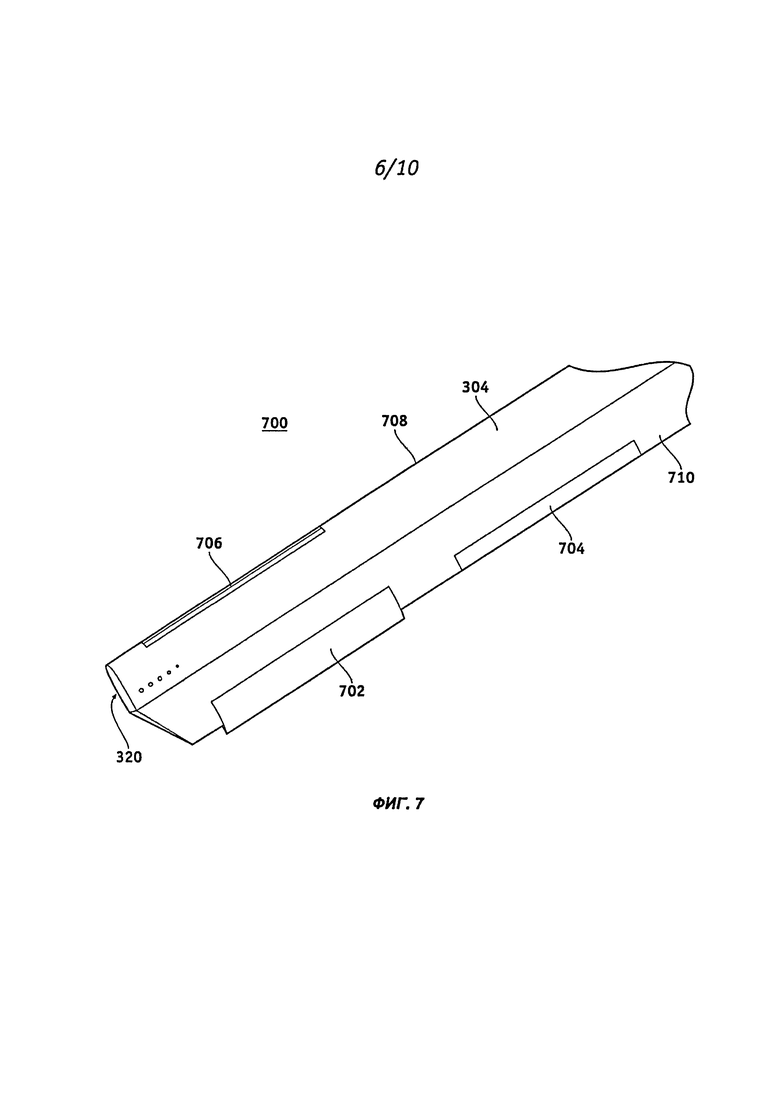
[0016] На фиг. 7 изображен типовой вид в перспективе структуры лопасти несущего винта, содержащей выдвижной закрылок задней кромки, закрылок задней кромки и отклоняемый носок в качестве управляемых поверхностей согласно варианту реализации настоящего описания.
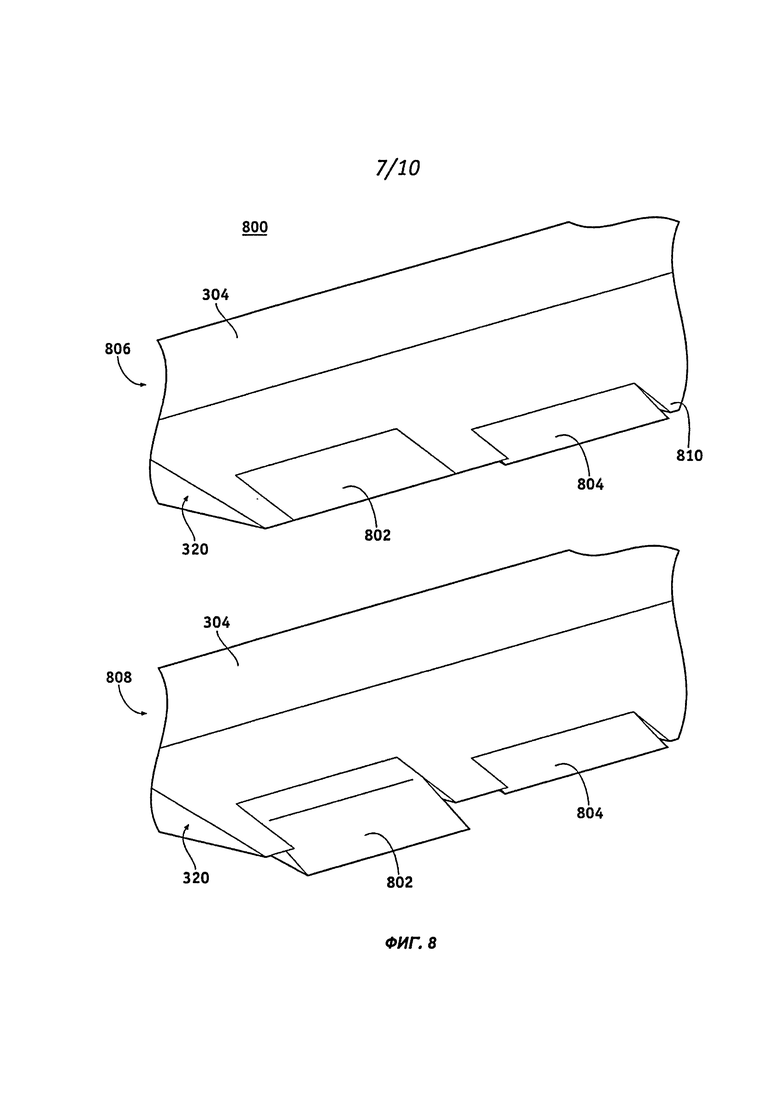
[0017] На фиг. 8 изображен типовой вид в перспективе структуры лопасти несущего винта, содержащей выдвижной закрылок задней кромки и закрылок задней кромки в качестве управляемых поверхностей согласно варианту реализации настоящего описания.
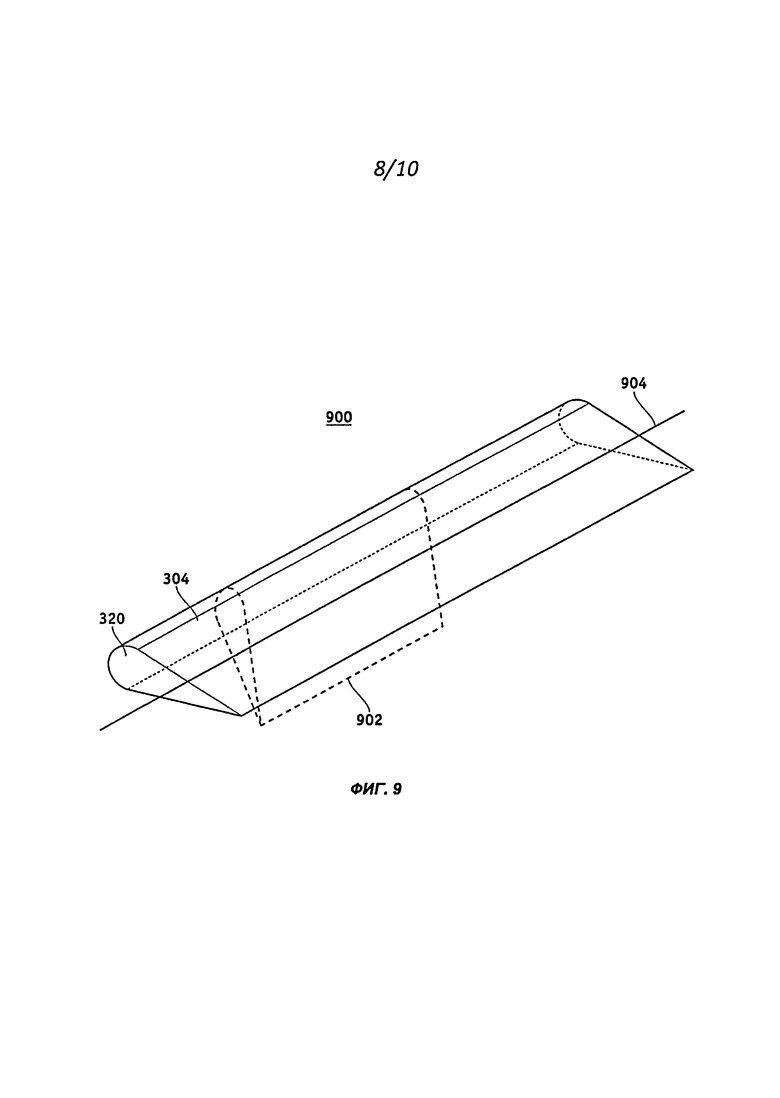
[0018] На фиг. 9 изображен типовой вид в перспективе лопасти несущего винта, содержащей управляемую поверхность согласно варианту реализации настоящего описания.
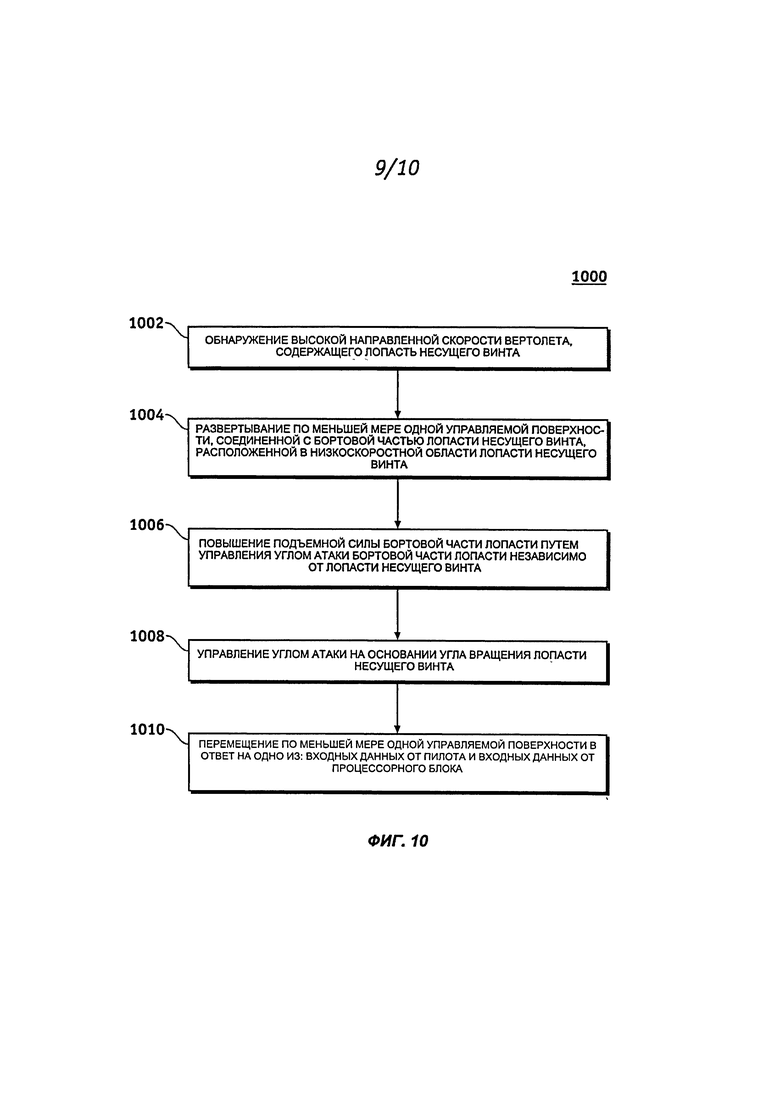
[0019] На фиг. 10 изображена типовая блок схема, показывающая способ функционирования системы лопасти несущего винта винтокрылого летательного аппарата с улучшенными летно-техническими характеристиками согласно варианту реализации настоящего описания.
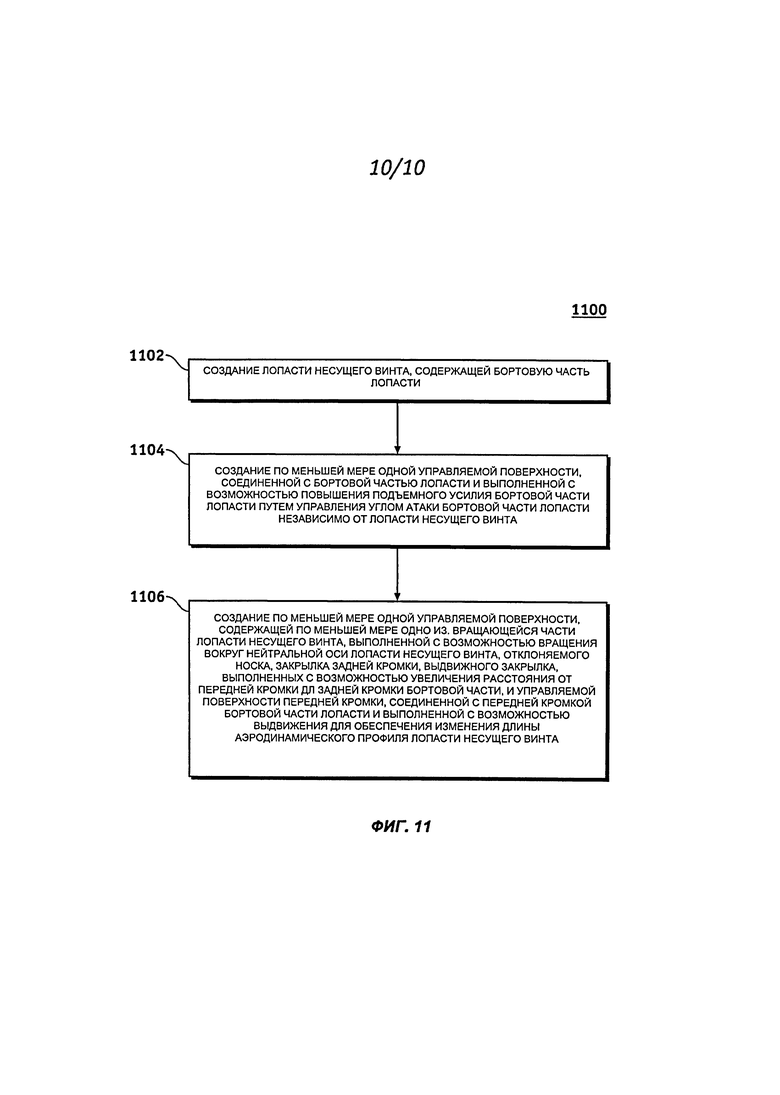
[0020] На фиг. 11 изображена типовая блок схема, показывающая способ создания лопасти несущего винта винтокрылого летательного аппарата с улучшенными летно-техническими характеристиками согласно варианту реализации настоящего описания.
ПОДРОБНОЕ ОПИСАНИЕ
[0021] Приведенное ниже подробное описание по характеру является примерным и не предназначено для ограничения настоящего описания или применения и использования вариантов реализации настоящего описания. Описания конкретных устройств, способов и применений приведены лишь в качестве примеров. Модификации представленных в настоящем описании примеров станут очевидны для специалистов в данной области техники и общие принципы, определенные в настоящем описании, могут быть использованы для других примеров и применений, не отступая от сущности и объема настоящего изобретения. Кроме того, исключено какое-либо намерение, касающееся ограничения настоящего изобретения любой выраженной или подразумеваемой теорией, представленной в предыдущих разделах: области техники, уровне техники, сущности изобретения или в приведенном ниже подробном описании. Настоящее описание должно быть соотнесено с объемом, соответствующим формуле изобретения, и не ограничено примерами, представленными и показанными в настоящей заявке.
[0022] Варианты реализации настоящего описания могут быть представлены в виде функциональных и/или логических блочных компонентов и различных этапов способа. Следует понимать, что такие блочные компоненты могут быть реализованы любым числом аппаратных, программных и/или аппаратно-программных компонентов, выполненных с возможностью выполнения заданных функций. Для краткости традиционные методики и компоненты, относящиеся к аэродинамике, газогидродинамике, структурам, поверхностям управления, изготовлению и другим функциональным аспектам систем (и отдельные рабочие компоненты систем), могут быть не раскрыты подробно в приведенном ниже описании. Кроме того, специалисты в данной области техники поймут, что варианты реализации настоящего описания могут быть осуществлены совместно с множеством структурных тел, и что варианты реализации, представленные в настоящей заявке, являются исключительно типовыми вариантами реализации настоящего описания.
[0023] Варианты реализации настоящего описания представлены в контексте практического неограничивающего применения, а именно лопасти вертолета. Однако варианты реализации настоящего описания не ограничены такими применениями лопасти вертолета и способы, представленные в настоящем описании, могут быть также использованы в других применениях газогидродинамических поверхностей. Например, варианты реализации могут быть применимыми к другим поверхностям летательного аппарата, образующим подъемное усилие, таким как закрылок или хвостовое оперение, поверхности управления летательного аппарата, такой как руль высоты и элерон, пилону двигателя, лопасти воздушной турбины, гидродинамической поверхности, использующей жидкость (например, воду) вместо воздуха, парусу парусной лодки, воздушному винту двигателя, ветродвигателю, и иметь другое применение.
[0024] Как станет очевидно для специалистов в данной области техники, после изучения настоящего описания, приведенное ниже описание представляет собой примеры и варианты реализации настоящего раскрытия изобретения и не ограничено функционированием согласно этим примерам. Могут быть использованы другие варианты реализации и могут быть выполнены структурные изменения, не отступая от объема типовых вариантов реализации настоящего раскрытия изобретения.
[0025] Более конкретно, со ссылкой на чертежи, варианты реализации настоящего раскрытия изобретения могут быть описаны в контексте способа 100 (способ 100) изготовления и обслуживания летательного аппарата согласно фиг. 1 и летательного аппарата 200 согласно фиг. 2. В течение этапа подготовки производства типовой способ 100 может содержать техническое задание и проектное решение 104 летательного аппарата 200 и материальное снабжение 106. В течение производства происходит изготовление 108 компонентов и сборочных узлов и интеграция 110 систем летательного аппарата 200. В дальнейшем летательный аппарат 200 может быть подвержен сертификации и выпуску 112 для ввода в эксплуатацию 114. При эксплуатировании потребителем, для летательного аппарата 200 предусмотрен график регулярного технического обслуживания 116 (который может также содержать изменение, реконфигурацию, восстановление и так далее).
[0026] Каждый из процессов способа 100 может быть осуществлен или выполнен системотехническим предприятием, третьей стороной и/или оператором (например, потребителем). В контексте данного описания системотехническое предприятие может содержать, без ограничения, любое число производителей авиационной техники и субподрядчиков крупной системы; третья сторона может содержать, без ограничения, любое число оптовых фирм, субподрядчиков и поставщиков; и оператор может представлять собой, без ограничения, авиалинии, лизинговую компанию, военную организацию, обслуживающую организацию и т.п.
[0027] Согласно фиг. 2 летательный аппарат 200, созданный типовым способом 100, может содержать корпус 218 летательного аппарата с системами 220 и внутренним пространством 222. Примеры высокоуровневых систем 220 содержат по меньшей мере одну из двигательной установки 224, электрической системы 226, гидравлической системы 228, системы 230 искусственного климата и системы 232 лопасти несущего винта винтокрылого летательного аппарата с улучшенными летно-техническими характеристиками. Также может содержаться любое число других систем.
Несмотря на то, что представлен пример воздушно-космического пространства, варианты реализации настоящего раскрытия изобретения могут быть применены к другим отраслям промышленности.
[0028] Устройство и способы, изложенные в настоящем описании, могут быть использованы в течение любой по меньшей мере одной из стадий способа 100 производства и обслуживания. Например, компоненты или подсборки, соответствующие процессу 108 производства, могут быть изготовлены или произведены подобно компонентам или сборочным единицам, созданным при эксплуатации летательного аппарата 200.
Кроме того, по меньшей мере один вариант реализации устройства, вариант реализации способа или их комбинация могут быть использованы в течение стадий 108 и 110 производства, например, путем существенного ускорения сборки или снижения стоимости летательного аппарата 200.
Подобным образом, по меньшей мере один из вариантов реализации устройства, вариантов реализации способа или их комбинация могут быть использованы при эксплуатации летательного аппарата 200, например и без ограничения, для технического обслуживания 116.
[0029] Варианты реализации настоящего раскрытия изобретения устраняют или снижают влияние срыва потока на отступающей лопасти несущего винта и повышают скорость движения вперед вертолета. Таким образом, подъемные характеристики на стороне вертолета увеличивают повышающуюся скорость движения вперед вертолета. Большая тяга может быть создана в комплексной системе несущего винта вертолета при устранении или снижении вероятности срыва потока на лопасти несущего винта.
[0030] На фиг. 3 изображен вид в перспективе типового несущего винта 300 вертолета согласно варианту реализации настоящего раскрытия изобретения. Главный несущий винт 300 вертолета или система 300 несущего винта выполнен наподобие вентилятора, который используется для создания аэродинамической подъемной силы, несущей вес вертолета 302, и тягового усилия, оказывающего противодействие аэродинамическому сопротивлению при полете вперед. Каждая лопасть 304 несущего винта установлена на лонжероне 310, соединенном с валом 316 несущего винта, в противоположность рулевому винту 306 вертолета, который присоединен через комбинацию ведущего вала(-ов) и коробок передач вдоль хвостовой балки 308. Как правило, вертолет 302 содержит лопасти 304 несущего винта, выступающие из втулки 312 несущего винта, которая может иметь аэродинамическую крышку 314. Шаг лопасти обычно контролируется тарелкой автомата перекоса, соединенной между лопастями 304 несущего винта и органами управления полетом вертолета (не показаны).
[0031] Типичная лопасть несущего винта вертолета представляет собой цельный однородный элемент и прикреплена к втулке 312 несущего винта, которая соединена с валом 316 несущего винта. Множество частей могут составлять цельную лопасть, которая может быть, например и без ограничения, прямой, иметь изгиб от области 320 комля лопасти до законцовки 326 или другую конфигурацию лопасти. При работе лопасть 304 несущего винта совершает вращение вокруг центральной точки, а именно, вала 316 несущего винта (ось 316 вращения). Механически при работе угол атаки лопасти 304 несущего винта изменяется для увеличения или уменьшения подъемного усилия и тягового усилия. При угле атаки, уменьшенном на отступающей лопасти для предотвращения срыва потока, подъемная сила, как правило, также снижается, что может иметь почти такое же влияние как при срыве потока, так как большие углы атаки в основном способствуют срыву потока.
[0032] Поскольку лопасти 304 несущего винта совершают вращение в радиальной конфигурации, законцовка 326 в самой удаленной от центра точке (например, самая удаленная от вала 316 несущего винта) лопастей 304 несущего винта получает окружную или касательную скорость, в значительной степени большую, чем самая внутренняя часть 318 (внутренняя часть 318 лопасти) лопастей 304 несущего винта, расположенная наиболее близко к валу 316 несущего винта. Линейная скорость точки на лопасти 304 несущего винта на некотором расстоянии от оси 316 вращения соответствует угловой или касательной скорости такой точки. Касательная или окружная скорость на участке самой внутренней части 318 (внутренней) лопасти 304 несущего винта ниже по сравнению с участком законцовки 326 (внешним) на той же лопасти 304 несущего винта. Как правило, при высоких скоростях движения вперед, при отступании угла поворота лопасти 304 несущего винта, угол атаки лопасти 304 несущего винта полностью уменьшается. Согласно вариантам реализации настоящего раскрытия изобретения, если угол атаки лопасти 304 несущего винта полностью уменьшен и если угол атаки другой части лопасти 304 несущего винта увеличен (например, в области 320 комля лопасти и/или средней части 322), то подъемная сила по-прежнему может быть создана, сохраняя подъемную силу и управляемость на данной стороне. Изменение угла атаки может быть установлено, например, примерно на 90 градусов до возникновения необходимости влияния угла атаки.
[0033] Варианты реализации настоящего раскрытия изобретения обеспечивают создание управляемых поверхностей 328 в качестве средств, расширяющих технические возможности, для разделения частей лопасти 304 несущего винта. Согласно приведенному ниже подробному описанию, управляемые поверхности 328 двигаются/поворачиваются независимо от всей лопасти 304 несущего винта для повышения подъемной силы на более медленных внутренних частях лопасти 304 несущего винта, таких как внутренняя часть 318 лопасти, которая содержит самую внутреннюю часть лопасти 304 несущего винта.
[0034] На фиг. 4 изображена типовая функциональная блок-схема системы 400 (система 400) лопасти несущего винта винтокрылого летательного аппарата с улучшенными летно-техническими характеристиками согласно варианту реализации настоящего раскрытия изобретения. Система 400 может содержать лопасть 304 несущего винта, управляемую поверхность 402, исполнительный механизм 406 и управляющее устройство 408. Фиг. 4 более подробно объяснена в сочетании с фиг. 3 в приведенном ниже описании.
[0035] Управляемая поверхность 402 (328 на фиг. 3) соединена с внутренней частью 318 лопасти (фиг. 3) лопасти 304 несущего винта и выполнена с возможностью увеличения подъемной силы внутренней части 318 лопасти путем изменения угла атаки внутренней части 318 лопасти независимой от лопасти 304 несущего винта. Варианты реализации настоящего раскрытия изобретения обеспечивают создание различных управляемых поверхностей, такие как управляемая поверхность 402, в качестве средств повышения технических возможностей для разделения частей лопасти 304 несущего винта, что будет объяснено в приведенном ниже описании при рассмотрении фиг. 5-9.
[0036] Исполнительный механизм 406 выполнен с возможностью изменения положения (то есть выполнен с возможностью изгиба, отклонения, изменения формы) управляемой поверхности 402 в ответ на возбуждающий сигнал. Возбуждающий сигнал может быть создан вводом данных от пилота/оператора, предварительно запрограммированными входными данными от процессорного блока 410 управляющего устройства 408 в случае автоматизированного управления или их комбинацией. Таким образом, управляемая поверхность 402 движется/поворачивается независимо от всей лопасти 304 несущего винта для увеличения подъемной силы на более медленных внутренних частях лопасти, таких как самая внутренняя часть 318, что более подробно объяснено в приведенном ниже описании при рассмотрении фиг. 5-9.
[0037] В одном варианте реализации управляющее устройство 408 управляет исполнительным механизмом 406 через механизм управления для управления положением управляемой поверхности 402, на основании различных рабочих условий, что пояснено в приведенном ниже описании. В другом варианте реализации управляющее устройство 408 может содержать управляющее устройство или может быть выполнен в виде контроллера (присоединенного к системам летательного аппарата) для облегчения управления положением (например, выдвижение, поворот и подъем или опускание) управляемой поверхности 402.
[0038] Любой исполнительный механизм, известный специалистам в данной области техники, может быть использован для приведения в движение управляемой поверхности 402. Например, без ограничения, может быть использован гидравлический привод, пьезоэлектрический привод, подпружиненный механизм, противоточный блокировочный механизм, пиротехнический привод, исполнитель на основе сплава с памятью формы или другой исполнительный механизм.
[0039] Управляющее устройство 408 может содержать, например и без ограничения, процессорный блок 410, модуль 412 памяти и другой модуль. Управляющее устройство 408 может быть реализовано, например и без ограничения, в качестве составной части системы летательного аппарата, централизованного процессора летательного аппарата, вычислительного модуля подсистемы, предназначенного для системы 400 лопасти несущего винта винтокрылого летательного аппарата с улучшенными летно-техническими характеристиками, или другого воплощения.
[0040] Управляющее устройство 408 выполнено с возможностью управления исполнительным механизмом 406 для изменения положения управляемой поверхности 402 согласно различным рабочим условиям.
Рабочие условия могут содержать, например и без ограничения, режим полета или другое условие. Режим полета может содержать, например и без ограничения, взлет, крейсерский полет, заход на посадку, посадку или другой режим полета. Таким образом, условия полета могут содержать, например и без ограничения, высоту полета, воздушную скорость, число Маха, температуру или другой параметр. Управляющее устройство 408 может быть расположено дистанционно от исполнительного механизма 406 или может быть соединен с ним.
[0041] Процессорный блок 410 содержит логическую схему для обработки данных, которая выполнена с возможностью исполнения функций, способов и задач обработки, связанных с функционированием системы 400. В частности, логическая схема выполнена с возможностью поддержания системы 400, раскрытой в настоящем описании. Например, процессорный блок 410 может побуждать исполнительный механизм 406 изменять положение управляемой поверхности 402 на основании различных условий полета. Процессор может побуждать исполнительный механизм 406 перемещать по меньшей мере одну управляемую поверхность 402 в ответ на входные данные от пилота/оператора или предварительно запрограммированные входные данные от процессорного блока 410.
[0042] При работе процессорный блок 410 выявляет высокую направленную скорость вертолета 302 (фиг. 3), содержащего лопасть 304 несущего винта. Высокая направленная скорость определяется в момент, когда вертолет 302, находящийся в воздухе, может зависать на месте и направлено движется вперед или сохраняет положение при воздушной скорости, которая может приводить в результате к срыву потока на отступающей лопасти. Затем процессорный блок 410 побуждает исполнительный механизм 406 развернуть/активировать по меньшей мере одну управляемую поверхность 402, соединенную с внутренней частью 318 лопасти 304 несущего винта, расположенной в зоне низкой угловой или касательной скорости лопасти 304 несущего винта. Таким образом, подъемная сила на внутренней части 318 лопасти увеличивается посредством управления углом атаки внутренней части 318 лопасти независимо от лопасти 304 несущего винта. Процессорный блок 410 может управлять углом атаки на основании угла поворота лопасти 304 несущего винта.
[0043] Процессорный блок 410 может быть выполнен или реализован с использованием универсального процессора, ассоциативной памяти, процессора цифровой обработки сигналов, интегральной схемы прикладной ориентации, программируемой пользователем вентильной матрицы, любого подходящего программируемого логического устройства, логического элемента на дискретных компонентах или транзисторной логической схемы, дискретных аппаратных компонентов или их комбинации, разработанных для выполнения функций, раскрытых в настоящем описании. Таким образом, процессор может быть выполнен в виде микропроцессора, управляющего устройства, управляющего микроустройства, конечного автомата и т.п. Кроме того, процессор может быть выполнен в виде комбинации вычислительных устройств, например, комбинации процессора цифровой обработки сигналов и микропроцессора, микропроцессоров, по меньшей мере одного микропроцессора совместно с ядром процессора цифровой обработки сигналов или любой другой такой конфигурации.
[0044] Модуль 412 памяти может содержать область хранения данных с памятью, форматированной для поддержания функционирования системы 400. Модуль 412 памяти выполнен с возможностью запоминания, хранения и предоставления данных по мере необходимости для поддержания функциональности системы 400. Например, модуль 412 памяти может запоминать данные о параметрах полета, сигналы управления исполнительным механизмом или другие данные.
[0045] В практических вариантах реализации модуль 412 памяти может содержать, например и без ограничения, энергонезависимое запоминающее устройство (энергонезависимая полупроводниковая память, устройство на жестком магнитном диске, устройство на оптическом диске и т.п.), запоминающее устройство с произвольной выборкой (например, SRAM, DRAM) или любую другую форму носителя данных, известного в уровне техники.
[0046] Модуль 412 памяти может быть соединен с процессорным блоком 410 и выполнен с возможностью хранения, например и без ограничения, базы данных и т.п. Кроме того, модуль 412 памяти может представлять динамически обновляющуюся базу данных, содержащую расписание для обновления базы данных, и т.п. Модуль 412 памяти может также хранить программное обеспечение, которое исполняется процессорным модулем 410, операционную систему, прикладную программу, предварительные данные, используемые при выполнении программы, или другое приложение.
[0047] Модуль 412 памяти может быть соединен с процессорным блоком 410 таким образом, чтобы процессорный блок 410 мог считывать данные с модуля 412 памяти и записывать данные на него. Например, процессорный блок 410 может обратиться к модулю 412 памяти для получения доступа к скорости летательного аппарата, положению руля управления полетом, углу атаки, числу Маха, высоте или другим данным.
[0048] В качестве примера, процессорный блок 410 и модуль 412 памяти могут размещаться в соответствующей специализированной интегральной микросхеме (ASIC). Кроме того, модуль 412 памяти может быть встроен в процессорный блок 410. В одном варианте реализации модуль 412 памяти может содержать кэш-память, предназначенную для хранения временных переменных или других промежуточных данных в течение выполнение команд, которые должны выполняться процессорным блоком 410.
[0049] На фиг. 5 изображен типовой вид в перспективе структуры 500 лопасти несущего винта, содержащей два закрылка, таких как закрылок 502 задней кромки и закрылок 504 задней кромки, используемых в качестве управляемых поверхностей и показанных в нейтральном положении 506 и в активированном положении 508 соответственно согласно варианту реализации настоящего раскрытия изобретения. Закрылок 502 задней кромки содержит внутренней закрылок, и закрылок 504 задней кромки содержит закрылок в середине размаха крыла, каждый из которых соединен с лопастью 304 несущего винта на внутренней части 318 лопасти (фиг. 3) соответственно. Каждый из закрылков 502 и 504 выполнен с возможностью подъема или опускания, изменяя угол атаки от передней кромки 512 до задней кромки 514. Амплитуда перемещения каждого из закрылков 502 и 504 может составлять, например и без ограничения, приблизительно от 2 до 5 градусов (например, относительно лопасти 304 несущего винта), приблизительно от 0 до 5 градусов, приблизительно от минус 5 до 5 градусов (т.е. для движения в оба направления) или другую подходящую амплитуду перемещения.
[0050] На фиг. 6 изображен типовой вид в перспективе структуры 600 лопасти несущего винта, содержащей закрылок 602 задней кромки, закрылок 604 задней кромки и управляемую поверхность 606 передней кромки, используемых в качестве управляемых поверхностей согласно варианту реализации настоящего раскрытия изобретения. Закрылок 602 задней кромки содержит внутренней закрылок и закрылок 604 задней кромки содержит закрылок середины размаха крыла, каждый из которых соединен с задней кромкой 610 лопасти 304 несущего винта на внутренней части 318 лопасти соответственно. Каждый из закрылков 602 и 604 задней кромки выполнен с возможностью подъема или опускания, изменяя угол атаки от передней кромки 608 до задней кромки 610. Амплитуда перемещения каждого из закрылков 602 и 604 задней кромки может составлять, например и без ограничения, приблизительно от 2 до 5 градусов (например, относительно лопасти 304 несущего винта), приблизительно от 0 до 5 градусов, приблизительно от минус 5 до 5 градусов (т.е. для перемещения в оба направления) или другую подходящую амплитуду перемещения.
[0051] Управляемая поверхность 606 передней кромки соединена с передней кромкой 608 лопасти 304 несущего винта на внутренней части 318 лопасти. Управляемая поверхность 606 передней кромки выполнена с возможностью выдвижения для обеспечения изменения длины аэродинамического профиля 612 лопасти 304 несущего винта. Изменение длины увеличивает расстояние (хорду) от передней кромки 608 до задней кромки 610 лопасти 304 несущего винта в области около области 320 комля лопасти 304 несущего винта, почти так же по форме как, например, выдвижной закрылок. Амплитуда перемещения управляемой поверхности 606 передней кромки может составлять, например и без ограничения, приблизительно от 2 до 5 градусов (например, относительно лопасти 304 несущего винта), приблизительно от 0 до 5 градусов, приблизительно от минус 5 до 5 градусов (т.е. для движения в оба направления) или другую подходящую амплитуду перемещения.
[0052] На фиг. 7 изображен типовой вид в перспективе структуры 700 лопасти несущего винта, содержащей выдвижной закрылок 702 задней кромки, закрылок 704 задней кромки и отклоняемый носок 706, используемые в качестве управляемых поверхностей согласно варианту реализации настоящего раскрытия изобретения.
[0053] Выдвижной закрылок 702 задней кромки содержит внутренней выдвижной закрылок и закрылок 704 задней кромки содержит закрылок середины размаха крыла, каждый из которых соединен с задней кромкой 710 лопасти 304 несущего винта на внутренней части 318 лопасти соответственно. Выдвижной закрылок 702 задней кромки увеличивает расстояние от передней кромки 708 до задней кромки 710 внутренней части 318 лопасти.
[0054] Выдвижной закрылок 702 задней кромки выполнен с возможностью выпуска посредством смещения, а не поворота. Диапазон смещения выдвижного закрылка 702 задней кромки может составлять, например и без ограничения, приблизительно от 2 до 5 дюймов (например, относительно лопасти 304 несущего винта), приблизительно от 0 до 5 дюймов или другой подходящий диапазон смещения.
[0055] Закрылок 704 задней кромки выполнен с возможностью поворота вверх и вниз. Амплитуда поворота закрылка 704 задней кромки может составлять, например и без ограничения, приблизительно от 2 до 5 градусов или другую соответствующую амплитуду поворота.
[0056] Отклоняемый носок 706 соединен с передней кромкой 708 лопасти 304 несущего винта на внутренней части 318 лопасти и выполнен с возможностью поворота вверх и вниз. Амплитуда поворота отклоняемого носика 706 может составлять, например и без ограничения, приблизительно от 2 до 5 градусов (например, относительно лопасти 304 несущего винта), приблизительно от 0 до 5 градусов, приблизительно от минус 5 до 5 градусов (т.е., для движения в оба направления) или другую походящую амплитуду поворота.
[0057] На фиг. 8 изображен типовой вид в перспективе конструкции 800 лопасти несущего винта, содержащей выдвижной закрылок 802 задней кромки и закрылок 804 задней кромки, используемые в качестве управляемых поверхностей и показанные в положениях 806 и 808, соответственно, согласно варианту реализации настоящего раскрытия изобретения. Выдвижной закрылок 802 задней кромки содержит внутренний выдвижной закрылок и закрылок 804 задней кромки содержит закрылок середины размаха крыла, каждый из которых соединен с задней кромкой 810 лопасти 304 несущего винта соответственно на внутренней части 318 лопасти.
[0058] Положения 806 и 808 показывают выдвижной закрылок 802 задней кромки соответственно в отведенном положении и в выпущенном положении. Выдвижной закрылок 802 задней кромки выпускается посредством смещения, а не поворота. Диапазон смещения выдвижного закрыла 802 задней кромки может составлять, например и без ограничения, приблизительно от 2 до 5 дюймов (например, относительно лопасти 304 несущего винта), приблизительно от 0 до 5 дюймов или другой подходящий диапазон смещения.
[0059] Закрылок 804 задней кромки выполнен с возможностью поворота вверх и вниз. Амплитуда поворота закрылка 804 задней кромки может составлять, например и без ограничения, приблизительно от 2 до 5 градусов (например, относительно лопасти 304 несущего винта), приблизительно от 0 до 5 градусов, приблизительно от минус 5 до 5 градусов (т.е. для движения в оба направления) или другую подходящую амплитуду поворота.
[0060] На фиг. 9 изображена типовая лопасть 900 несущего винта, содержащая управляемую поверхность 902 согласно варианту реализации настоящего раскрытия изобретения.
[0061] Управляемая поверхность 902 содержит часть лопасти 304 несущего винта на внутренней части 318 лопасти и поворачивается вверх или вниз вокруг нейтральной оси 904 лопасти 304 несущего винта.
[0062] На фиг. 10 изображена типового блок схема, показывающая способ 1000 функционирования системы 400 лопасти несущего винта винтокрылого летательного аппарата с улучшенными летно-техническими характеристиками согласно варианту реализации настоящего раскрытия изобретения. Различные задачи, выполняемые применительно к способу 1000, могут быть выполнены механически, программным обеспечением, аппаратным обеспечением, аппаратно-программным обеспечением или любой их комбинацией. В качестве примера в приведенном ниже описании способа 1000 могут быть сделаны ссылки на элементы, упомянутые в приведенном выше описании в отношении фиг. 3-9. В практических вариантах реализации этапы способа 1000 могут быть выполнены лопастью 304 несущего винта, управляемой поверхностью 402, исполнительным механизмом 406, управляющим устройством 408 и т.д. Способу 1000 могут быть присущи функции, материал и структуры, которые подобны вариантам реализации, показанным на фиг. 3-9. Поэтому общие конструктивные особенности, функции и элементы могут быть не описаны подробно.
[0063] Способ 1000 может начинаться посредством управляющего устройства, такого как управляющее устройство 408, выявляющий высокую направленную скорость винтокрылого летательного аппарата, такого как вертолет 302, содержащего лопасть несущего винта, такую как лопасть 304 несущего винта (задача 1002). Согласно приведенному выше описанию высокая направленная скорость определяется, когда вертолет 302, находящийся в воздухе, может зависать на месте и направлено продвигается или сохраняет положение при воздушной скорости, которая может вызывать срыв потока на отступающей лопасти. Высокая направленная скорость может представлять собой, например, скорость в некотором направлении, достаточную для обусловливания появления разности скоростей в плоскости вращения лопасти 304 несущего винта.
[0064] Способ 1000 может продолжаться посредством развертывания по меньшей мере одной управляемой поверхности, такой как управляемая поверхность 328/402, соединенной с внутренней частью лопасти, такой как внутренняя часть 318 лопасти 304 несущего винта, расположенной в низкоскоростной области лопасти 304 несущего винта (задача 1004). *Область низкой скорости может содержать, например, область плоскости поворота лопасти 304 несущего винта, в которой скорость близка к скорости срыва лопасти 304 несущего винта. Область низкой скорости может содержать, например, область окружной скорости, область касательной скорости или другую область низкой скорости.
[0065] Способ 1000 может продолжаться посредством увеличения подъемной силы внутренней части 318 лопасти посредством управления углом атаки внутренней части 318 лопасти независимо от лопасти 304 несущего винта (задача 1006).
[0066] Способ 1000 может продолжаться управляющим устройством 408, управляющим углом атаки на основании угла поворота лопасти 304 несущего винта (задача 1008).
[0067] Способ 1000 может продолжаться посредством перемещения управляемой поверхности 328/402 в ответ на одно из: входных данных от пилота и входных данных от процессорного блока, такого как процессорный блок 410 (задача 1010).
[0068] На фиг. 11 изображена типовая блок схема, показывающая способ обеспечения лопасти несущего винта винтокрылого летательного аппарата с улучшенными летно-техническими характеристиками согласно варианту реализации настоящего раскрытия изобретения. Различные задачи, выполняемые применительно к способу 1100, могут быть выполнены механически, программным обеспечением, аппаратным обеспечением, аппаратно-программным обеспечением или любой их комбинацией. В качестве примера в следующем описании способа 1100 могут быть сделаны ссылки на элементы, упомянутые в приведенном выше описании в отношении фиг. 3-9. В практических вариантах реализации этапы способа 1100 могут быть выполнены лопастью 304 несущего винта, управляемой поверхностью 402, исполнительным механизмом 406, управляющим устройством 408 и т.д.
Способу 1100 могут быть присущи функции, материал и структуры, которые подобны вариантам реализации, показанным на фиг. 3-9. Поэтому общие конструктивные особенности, функции и элементы могут быть не описаны подробно.
[0069] Способ 1100 может начинаться с создания лопасти несущего винта, такой как лопасть 304 несущего винта, содержащей внутреннюю часть лопасти, такую как внутренняя часть 318 лопасти (задача 1102).
[0070] Способ 1100 может продолжиться путем создания по меньшей мере одной управляемой поверхности, такой как управляемая поверхность 402, соединенной с внутренней частью 318 лопасти и выполненной с возможностью увеличения подъемной силы внутренней части 318 лопасти посредством управления углом атаки внутренней части 318 лопасти независимо от лопасти 304 несущего винта (задача 1104).
[0071] Способ 1100 может продолжаться посредством создания управляемой поверхности 402, содержащей, например и без ограничения, поворотную часть лопасти 304 несущего винта, выполненную с возможностью поворота вокруг нейтральной оси, такой как нейтральная ось лопасти 304 несущего винта, отклоняемый носок 706, закрылок 502/504/602/604 задней кромки, выдвижной закрылок 702 задней кромки, выполненный с возможностью увеличения расстояния от передней кромки 708 до задней кромки 710 внутренней части 318, и управляемую поверхность 606 передней кромки, соединенную с передней кромкой 608 внутренней части 318 лопасти и выполненную с возможностью выдвижения для обеспечения изменения длины аэродинамического профиля 612 лопасти 304 несущего винта (задача 1106).
[0072] Таким образом, различные варианты реализации настоящего раскрытия изобретения устраняют или снижают влияние срыва потока на отстающей лопасти несущего винта, и повышают скорость движения вперед вертолета. Таким образом, подъемные характеристики на стороне вертолета увеличивают его повышающуюся скорость движения вперед.
[0073] Несмотря на то, что в приведенном выше подробном описании был представлен по меньшей мере один типовой вариант реализации, следует понимать, что существует огромное количество разновидностей. Кроме того, следует понимать, что типовой вариант реализации или варианты реализации, представленные в настоящем описании, никоим образом не предназначены для ограничения объема, применимости или конфигурации настоящего изобретения. Вероятнее всего, приведенное выше подробное описание обеспечит специалистов в данной области техники подходящей технологией для воплощения описанного варианта реализации или вариантов реализации. Следует понимать, что в функционирование и расположение элементов могут быть внесены различные изменения, не отступая от объема, определенного формулой изобретения, который содержит известные эквиваленты и предполагаемые эквиваленты в момент подачи данной заявки на патент.
[0074] В приведенном выше описании сделаны ссылки на элементы, узлы или детали, «соединенные» или «связанные» вместе. При использовании в настоящем описании, если иное явно не оговорено, «соединенный» означает, что один элемент/узел/деталь напрямую присоединен (или непосредственно взаимодействует с) к другому элементу/узлу/детали, и не обязательно механически. Аналогичным образом, если иное явно не оговорено, «связанный» означает, что один элемент/узел/деталь напрямую или опосредованно присоединен (или непосредственно или опосредованно взаимодействует с) к другому элементу/узлу/детали, и не обязательно механически. Таким образом, несмотря на то, что на фиг. 3-9 изображены типовые компоновки элементов, в некотором варианте реализации настоящего раскрытия изобретения могут присутствовать дополнительные промежуточные элементы, устройства, детали или компоненты.
[0075] Термины и фразы, использованные в настоящей заявке, а также их разновидности, если иное явно не оговорено, должны быть рассмотрены как неограничивающие. В качестве примеров приведенного выше описания: термин «содержащий» должен пониматься как означающий «содержащий, без ограничения» и т.п.; термин «пример» использован для обеспечения типовых примеров рассматриваемого объекта и не является исчерпывающим или ограничивающим списком; и прилагательные, такие как «условный», «традиционный», «нормальный», «стандартный», «известный» и термины подобного значения не должны быть истолкованы как ограничивающие описанный объект по отношению к данному периоду времени или к объекту, доступному на данный период времени, а вместо этого должны быть истолкованы как охватывающие условные, традиционные, нормальные или стандартные технологии, которые могут быть доступны или известны сейчас или в любое время в будущем.
[0076] Подобным образом, группа объектов, связанных союзом «и», не должна быть истолкована как требующая, чтобы каждый из этих объектов присутствовал в группе, а вероятнее всего должна быть истолкована как «и/или» до тех пор, пока иное явно не оговорено. Аналогичным образом, группа объектов, связанных союзом «или», не должна быть истолкована как требующая взаимного исключения среди данной группы, а вероятнее всего должна быть также истолкована как «и/или» до тех пор, пока иное явно не оговорено. Кроме того, не смотря на то, что объекты, элементы или компоненты настоящего описания могут быть представлены или заявлены в единственном числе, тем не менее, множественное число подразумевается в пределах объема настоящего изобретения до тех пор, пока явно не установлено ограничение в отношении единственного числа.
[0077] Наличие слов с широким значением и фраз таких как «по меньшей мере один», «по меньшей мере», «но не ограниченный» или других подобных фраз в некоторых случаях не должно пониматься как необходимость или преднамеренность ограниченной ситуации в случаях, когда такие фразы с широким значением могут отсутствовать. Термин «около» в отношении численного значения или диапазона предназначен охватывать величины, получающиеся в результате экспериментальной погрешности, которая может произойти при выполнении измерений.
[0078] При использовании в настоящем описании, если иное явно не оговорено, термин «выполненный с возможностью» означает возможность использования, приспосабливаемость или готовность к использованию или обслуживанию, пригодный для конкретной цели и способный к выполнению упомянутой или необходимой функции, представленной в настоящем описании. В отношении систем и устройств термин «выполненный с возможностью» означает, что система и/или устройство полностью функционально и откалибровано, содержит элементы и соответствует действующим требованиям работоспособности для выполнения указанной функции при активации.
Изобретение относится к области авиации, в частности к способам и системам управления лопастями несущего винта винтокрылого летательного аппарата. Лопасть несущего винта содержит внутреннюю часть лопасти и по меньшей мере одну управляемую поверхность, соединенную с внутренней частью лопасти. Управляемая поверхность выполнена с возможностью повышения подъемной силы внутренней части лопасти путем изменения угла атаки внутренней части лопасти независимо от остальной части лопасти несущего винта. Система выполнена с возможностью выявления высокой направленной скорости винтокрылого летательного аппарата и развертывания по меньшей мере одной управляемой поверхности в ответ на указанное выявление высокой скорости. Достигается возможность устранения или снижения вероятности срыва потока на лопасти несущего винта. 3 н. и 17 з.п. ф-лы, 11 ил.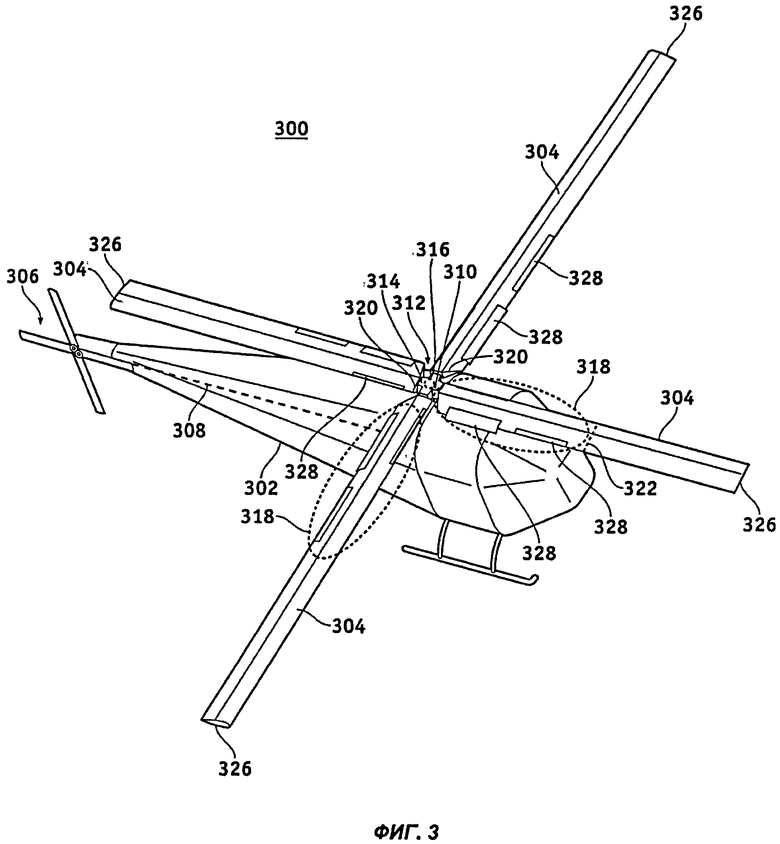
1. Система лопасти несущего винта винтокрылого летательного аппарата, содержащая:
лопасть несущего винта, содержащую внутреннюю часть лопасти, и
по меньшей мере одну управляемую поверхность, соединенную с внутренней частью лопасти и выполненную с возможностью повышения подъемной силы внутренней части лопасти путем изменения угла атаки внутренней части лопасти, независимой от лопасти несущего винта;
причем система выполнена с возможностью выявления высокой направленной скорости винтокрылого летательного аппарата и развертывания по меньшей мере одной управляемой поверхности в ответ на указанное выявление высокой направленной скорости.
2. Система лопасти несущего винта винтокрылого летательного аппарата по п. 1, в которой по меньшей мере одна управляемая поверхность содержит одно из: закрылка и выдвижного закрылка.
3. Система лопасти несущего винта винтокрылого летательного аппарата по п. 2, в которой выдвижной закрылок увеличивает расстояние от передней кромки до задней кромки внутренней части лопасти.
4. Система лопасти несущего винта винтокрылого летательного аппарата по п. 2, в которой закрылок соединен с одним из: передней кромки внутренней части лопасти и задней кромки внутренней части лопасти.
5. Система лопасти несущего винта винтокрылого летательного аппарата по п. 1, в которой по меньшей мере одна управляемая поверхность содержит поворотную часть лопасти несущего винта, выполненную с возможностью поворота вокруг нейтральной оси лопасти несущего винта.
6. Система лопасти несущего винта винтокрылого летательного аппарата по п. 1, дополнительно содержащая процессорный блок, выполненный с возможностью управления углом атаки по меньшей мере одной управляемой поверхности.
7. Система лопасти несущего винта винтокрылого летательного аппарата по п. 6, в которой процессорный блок дополнительно выполнен с возможностью управления углом атаки на основании угла поворота лопасти несущего винта.
8. Система лопасти несущего винта винтокрылого летательного аппарата по п. 6, в которой лопасть несущего винта содержит управляемые поверхности, а процессорный блок выполнен с возможностью изменения угла атаки независимо для каждой из управляемых поверхностей.
9. Система лопасти несущего винта винтокрылого летательного аппарата по п. 6, в которой процессорный блок дополнительно выполнен с возможностью управления углом атаки в ответ на одно из: входных данных от пилота и входных данных от процессорного блока.
10. Система лопасти несущего винта винтокрылого летательного аппарата по п. 1, в которой внутренняя часть лопасти расположена в низкоскоростной области лопасти несущего винта.
11. Система лопасти несущего винта винтокрылого летательного аппарата по п. 1, в которой по меньшей мере одна управляемая поверхность содержит:
закрылок, соединенный с задней кромкой внутренней части лопасти, и
выдвижной закрылок, соединенный с задней кромкой внутренней части лопасти.
12. Система лопасти несущего винта винтокрылого летательного аппарата по п. 11, в которой по меньшей мере одна управляемая поверхность дополнительно содержит отклоняемый носок, соединенный с передней кромкой внутренней части лопасти.
13. Система лопасти несущего винта винтокрылого летательного аппарата по п. 1, в которой по меньшей мере одна управляемая поверхность содержит управляемую поверхность передней кромки, соединенную с передней кромкой внутренней части лопасти и выполненную с возможностью выдвижения для обеспечения изменения длины аэродинамического профиля лопасти несущего винта.
14. Система лопасти несущего винта винтокрылого летательного аппарата по п. 1, в которой по меньшей мере одна управляемая поверхность дополнительно содержит два закрылка, соединенные с задней кромкой внутренней части лопасти.
15. Способ функционирования системы лопасти несущего винта винтокрылого летательного аппарата, включающий:
выявление высокой направленной скорости винтокрылого летательного аппарата, содержащего лопасть несущего винта, с помощью указанной системы; и
развертывание по меньшей мере одной управляемой поверхности, соединенной с внутренней частью лопасти несущего винта, расположенной в низкоскоростной области лопасти несущего винта, в ответ на указанное выявление высокой направленной скорости.
16. Способ по п. 15, дополнительно включающий повышение подъемной силы внутренней части лопасти путем управления углом атаки внутренней части лопасти независимо от лопасти несущего винта.
17. Способ по п. 16, дополнительно включающий управление углом атаки на основании угла поворота лопасти несущего винта.
18. Способ по п. 16, дополнительно включающий перемещение по меньшей мере одной управляемой поверхности в ответ на одно из: входных данных от пилота и входных данных от процессорного блока.
19. Способ обеспечения создания лопасти несущего винта, включающий:
обеспечение создания лопасти несущего винта, содержащей внутреннюю часть лопасти, и
обеспечение создания по меньшей мере одной управляемой поверхности, соединенной с внутренней частью лопасти и выполненной с возможностью повышения подъемной силы внутренней части лопасти путем управления углом атаки внутренней части лопасти независимо от лопасти несущего винта,
причем обеспечена возможность управления указанной по меньшей мере одной управляемой поверхностью посредством системы лопасти несущего винта винтокрылого летательного аппарата, выполненной с возможностью выявления высокой направленной скорости винтокрылого летательного аппарата и развертывания указанной по меньшей мере одной управляемой поверхности в ответ на указанное выявление высокой направленной скорости.
20. Способ по п. 19, дополнительно включающий создание по меньшей мере одной управляемой поверхности, выбранной из группы, состоящей из: поворотной части лопасти несущего винта, выполненной с возможностью поворота вокруг нейтральной оси лопасти несущего винта, отклоняемого носка, закрылка задней кромки, выдвижного закрылка, выполненного с возможностью увеличения расстояния от передней кромки до задней кромки внутренней части, и управляемой поверхности передней кромки, соединенной с передней кромкой внутренней части лопасти и выполненной с возможностью выдвижения с обеспечением изменения длины аэродинамического профиля лопасти несущего винта.
| EP 1985536 A2, 29.10.2008 | |||
| US 2483480 A, 04.10.1949 | |||
| СПОСОБ УПРАВЛЕНИЯ НЕСУЩИМ ВИНТОМ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2203835C2 |

