Изобретение относится к авиации, а именно к управлению несущим винтом винтокрылого летательного аппарата.
Известен способ управления несущим винтом, реализованный на вертолетах ОКБ Братухина И.П. Омега I, Омега II, Б-4, Б-11 и на вертолетах ОКБ Яковлева А. С. ЯК-100 (Изаксон А.И. Советское вертолетостроение. М.: Машиностроение, 1981, с. 162, 251), заключающийся в изменении угла установки лопасти при помощи автомата перекоса типа "паук". При управлении циклическим шагом лопасти несущего винта шатун автомата перекоса отклоняется от вертикального положения под действием тяг управления, при этом тяги лопастей перемещаются, изменяя угол установки лопастей, при управлении общим шагом шатун перемещается вдоль оси вала несущего винта, через тяги изменяя угол установки лопастей.
Способ реализован в конструкции, использованной на вертолетах ОКБ Братухина И. П. Омега I, Омега II, Б-4, Б-11 и на вертолете ОКБ Яковлева А.С. ЯК-100 (Изаксон А.Н. Советское вертолетостроение. М.: Машиностроение, 1981, с.162, 251).
Конструкция управления состоит из тяг управления и автомата перекоса, который выполнен в виде пустотелого ползуна, перемещающегося внутри вала главного редуктора, и имеет шатун, качающийся внутри ползуна на шаровом шарнире, головки, расположенной на верхнем конце шатуна и связанной тремя рычагами с поводками лопастей несущего винта. Ползун автомата перекоса через винтовой необратимый механизм связан системой тяг и качалок с рычагом общего шага.
Недостатками данного способа являются: невозможность управления аппаратами с соосным размещения несущих винтов, что сужает область его применения; большие усилия в проводки управления, что уменьшает безопасность полета летательного аппарата; маленькая жесткость шатуна на изгиб, это приводит к маленькой жесткости проводки управления, увеличивая возможность возникновения колебаний лопастей, что снижает безопасность полета.
Недостатками данной конструкции управления являются: необходимость в большом диаметре ползуна и вала несущего винта для свободного движения в нем шатуна, маленькая жескость шатуна на изгиб, это приводит к маленькой жесткости проводки управления, большому диаметру и массе шатуна, увеличивая возможность возникновения колебаний лопастей, что снижает безопасность полета, особенности данной конструкции ограничивают область ее применения на летательных аппаратах больших масс, большие усилия, необходимые для управления несущим винтом, приводящие к необходимости установки тяжелой и ненадежной гидросистемы.
Известен способ управления несущим винтом по патенту RU 2088479, В 64 С 27/605, БИ 24 за 1997 г., заключающийся в изменении угла установки лопастей через тяги автоматом перекоса тарельчатого типа. Циклическое управление осуществляют наклоном плоскости колец автомата перекоса под действием качалок управления, при этом тяги поворачивают лопасти несущего винта на заданный угол установки. Управление общим шагом осуществляют перемещением кольца автомата перекоса вдоль оси вала несущего винта.
Конструктивно способ управления реализован в патенте RU 2088479, В 64 С 27/605, 1994, БИ 24 за 1997 г.
Конструкция управления состоит из: тяг лопастей, автомата перекоса содержащего: вращающееся кольцо с шарнирно присоединенными к нему тягами поворота лопастей, соединенного шлиц-шарниром с приводным валом несущего винта, и невращающееся кольцо с шарнирно присоединенными к нему тягами продольного и поперечного управления и связанное подшипником с вращающимся кольцом, тягу управления общим шагом несущего винта, рамку, соединенную двумя сферическими подшипниками с невращающимся кольцом и соединенную двумя сферическими подшипниками с двухплечим рычагом общего шага, который шарнирно закреплен на корпусе редуктора и соединен с тягой общего шага несущего винта.
Недостаткамии способа управления несущим винтом являются: большие усилия в проводке управления, что приводит к возникновению колебаний лопастей и уменьшает безопасность полета летательного аппарата, изгиб плоскости колец автомата перекоса, приводящий к малой жесткости и малой надежности системы управления.
Недостатками данной конструкции системы управления несущего винта являются: необходимость применения вращающегося кольца автомата перекоса и подшипника большого диаметра, связывающего вращающееся и невращающееся кольца автомата перекоса, нагрузка на кольца автомата перекоса перпендикулярна их плоскости, что заставляет их работать на изгиб, это приводит к необходимости, из условий сохранения жесткости, увеличивать их высоту, а следовательно, и массу, а также к необходимости установки между кольцами автомата перекоса подшипника, воспринимающего осевую нагрузку, что также приводит к увеличению массы автомата перекоса несущего винта, большие усилия, необходимые для управления несущим винтом, приводящие к необходимости установки тяжелой и ненадежной гидросистемы.
Наиболее близким по сущности к предлагаемому способу управления несущим винтом является способ управления, применяемый на вертолете KAMAN (обзор ЦАГИ, "Проектные и экспериментальные исследования скоростных вертолетов и винтокрылых аппаратов", 296 за 1969 г.), заключающийся в изменении угла установки лопастей с помощью отклонения сервозакрылков, которыми управляет автомат перекоса типа "паук". При циклическом управлении шатуны отклоняют от вертикального положения, и через тяги отклоняют сервозакрылки, при управлении общим шагом шатуны перемещают вдоль оси вала несущего винта, через тяги отклоняя сервозакрылки, при этом момент, возникающий при отклонении сервозакрылков, поворачивает лопасти относительно продольной оси на заданный угол установки.
Способ управления несущим винтом реализован в конструкции управления установленной на вертолете KAMAN (обзор ЦАГИ, "Проектные и эксперементальные иследования скоростных вертолетов и винтокрылых аппаратов", 296 за 1969 г.).
Конструкция управления несущим винтом состоит из сервозакрылков, соединенных, через тяги и качалки, с автоматом перекоса, который включает два шатуна, шарнирно соединенных с вращающейся частью подшипника, невращающаяся часть которого шарнирно закреплена на тягах управления. Плоскость колец подшипника выполнена с возможностью отклонения от положения, перпендикулярного валу несущего винта.
Недостатками данного способа являются: невозможность управления аппаратами с соосным размещения несущих винтов, что сужает область его применения, маленькая жесткость шатунов на изгиб и маленькая жесткость тяг управления закрылками, что приводит к возможность их колебаний, ухудшая управляемость несущим винтом, тем самым снижая безопасность полета винтокрылого летательного аппарата.
Недостатками данной конструкции управления являются: необходимость в большом диаметре вала несущего винта для свободного движения в нем шатуна, что увеличивает массу системы управления, размещение автомата перекоса внутри вала несущего винта, внутри редуктора, затрудняет эксплуатацию автомата перекоса и требует применения специального редуктора, большая длина шатунов, приводящая к маленькой жесткости системы управления, что снижает управляемость несущего винта и безопасность полета, большая масса тяг управления сервозакрылками.
Решаемой задачей предлагаемого способа и устройства является повышение управления несущим винтом, а следовательно, повышение безопасности полета летательного аппарата.
Способ управления несущим винтом винтокрылого летательного аппарата заключается в изменении угла установки лопастей при помощи сервозакрылков, отклоняемых автоматом перекоса, при этом управление циклическим шагом осуществляют перемещением кольца автомата перекоса в плоскости, параллельной плоскости втулки несущего винта, эти перемещения передают через обкатывающие ролики, прижатые к кольцу центробежной силой, на суммирующий механизм автомата перекоса, а управление общим шагом осуществляют перемещением ползуна вдоль оси вала несущего винта, затем перемещения циклического и общего управления суммируют на рычаге, и через тросы, натянутые центробежной силой, отклоняют сервозакрылки, возникающими аэродинамическими моментами поворачивают лопасти вокруг продольных осей.
Устройство управления несущим винтом винтокрылого летательного аппарата состоит из автомата перекоса, сервозакрылков и связи между ними. Автомат перекоса выполнен из невращающегося кольца, установленного параллельно втулке несущего винта и шарнирно закрепленного на качалках циклического шага, которые установлены на корпусе редуктора, при этом невращающееся кольцо выполнено с возможностью перемещения в плоскости, параллельной плоскости втулки несущего винта, и суммирующего механизма, состоящего из качалки общего шага, шарнирно закрепленной на втулке несущего винта с возможностью опирания на ползун для изменения общего шага, и закрепленной на ней суммирующей качалке, на которой через подшипник закреплен ролик, выполненный с возможностью обкатывания по невращающемуся кольцу, а связь автомата перекоса с сервозакрылками осуществлена с помощью троса, натянутого центробежной силой.
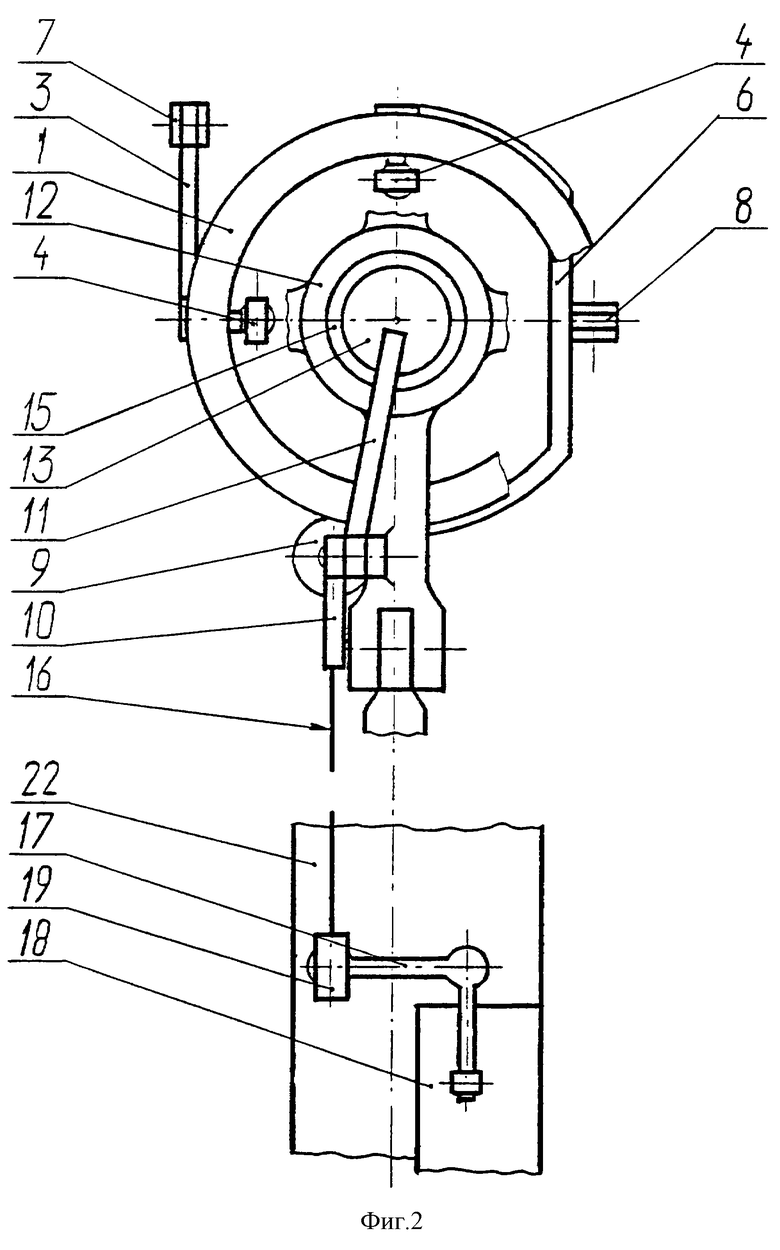
Для пояснения сущности предлагаемого изобретения показаны на фиг.1 - общий вид, на фиг.2 - вид с верху на несущий винт, где:
1 - невращающееся кольцо,
2 - рычаг продольного управления,
3 - качалка продольного управления,
4 - сферический подшипник,
5 - рычаг поперечного управления,
6 - качалка поперечного управления,
7 - тяга продольного управления,
8 - тяга поперечного управления,
9 - обкатывающийся ролик,
10 - суммирующая качалка,
11 - качалка общего шага,
12 - втулка несущего винта,
13 - ползун для изменения общего шага,
14 - подшипники,
15 - вал несущего винта,
16 - трос управления сервозакрылками,
17 - качалка сервозакрылка,
18 - серво-закрылок,
19 - центробежный груз,
20 - лопасть несущего винта,
21 - редуктор,
22 - тяга общего шага,
А - ось поворота качалки 10,
Б - ось поворота качалки 11,
L - расстояние между тросом управления и осью горизонтального шарнира.
Невращающееся кольцо 1 опирается, через сферический подшипник 4, на рычаг 2, который шарнирно закреплен на качалке 3 и на рычаге 5, шарнирно закрепленных на качалку 6. Качалки 3 и 6, закрепленные на корпусе редуктора и связанные с тягами циклического шага 7 и 8 соответственно. Кольцо 1 имеет с наружной стороны профилированную поверхность, по которой обкатывается ролик 9, через подшипник закрепленный на качалке 10. Качалка 10 в точке А закреплена на качалке 11. Качалка 11 в точке Б закреплена на втулке несущего винта 12 и опирается на ползун 13, закрепленный в подшипниках 14 внутри вала несущего винта 15. Ползун 13 вращается вместе с валом несущего винта, имеет возможность перемещаться вдоль оси вала и связан через подшипник с тягой общего шага несущего винта. Качалка 10 тросом 16 связана через качалку 17, закрепленную на лопасти 20, с сервозакрылком 18, установленным в хвостовой части лопасти. Груз 19, закрепленный на качалке 17, под действием центробежной силы осуществляет натяжение троса 16 и прижим ролика 9 к не вращающемуся кольцу автомата перекоса 1. Расстояние L между тросом управления и осью горизонтального шарнира обеспечивает аэродинамическую компенсацию угла взмаха лопасти.
Устройство работает следующим образом.
Циклическое управление осуществляют перемещением кольца 1 в плоскости, параллельной плоскости втулки несущего винта, при этом ось кольца и ось вала винта остаются параллельными. Перемещение осуществляется под действием тяг циклического шага 7, 8, которые поворачивают качалки 3 и 6 соответственно, это приводит к повороту рычагов 2, 5. Шарнирное соединение рычагов 2, 5 с качалками 3, 6 соответственно, позволяет убрать связь продольного и поперечного управления. При обкатывании ролика 9 вокруг кольца 1 качалка 10 циклически поворачивается относительно точки А, через трос 16 и качалку 17 циклически отклоняет сервозакрылок 18, что приводит к изменению угла установки лопасти 20.
Управление общим шагом осуществляют перемещением ползуна 13, который поворачивает качалку 11 относительно точки Б и перемещает точку А, при этом качалка 10 поворачивается относительно точки соприкосновения кольца 1 с роликом 9 через трос 16 и качалку 17, отклоняя сервозакрылок 18, приводя к изменению угла установки лопасти 20.
При совместном циклическом управлении и управлении общем шагом качалка 10 перемещается относительно мгновенного центра вращения, отклоняя сервозакрылок 18 через качалку 17 и трос 16, изменяя угол установки лопасти.
Преимущество данного способа заключается в том, что нагрузка на кольцо автомата перекоса действует в плоскости кольца автомата перекоса - это увеличивает жесткость и надежность системы управления, увеличивая безопасность полета винтокрылого летательного аппарата; осуществление связи между автоматом перекоса и сервозакрылками тросом, натягиваемым центробежной силой, увеличивает жесткость проводки управления и значительно снижает ее массу; применение обкатывающих роликов дает возможность упростить и облегчить автомат перекоса; управление винтом при помощи сервозакрылков позволяет отказаться от тяжелой и ненадежной гидросистемы.
Преимущество данной конструкции системы управления винтом заключается в том, что нагрузка на кольцо автомата перекоса действует только в плоскости кольца, что позволяет значительно снизить массу кольца, конструкция не имеет вращающегося кольца и большого подшипника, связывающего кольца, вместо них установлены обкатывающие ролики, по одному на каждую лопасть, это позволяет значительно облегчить автомат перекоса, применение троса, натягиваемого центробежной силой, позволяет отказаться от системы тяжелых тяг и качалок вдоль лопасти, применение сервозакрылков для управления углом установки лопастей позволяет отказаться от тяжелой недолговечной и ненадежной гидросистемы, даже на вертолетах большой массы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ НЕСУЩИМ ВИНТОМ ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2371351C2 |
| МЕХАНИЗМ АВТОМАТА ПЕРЕКОСА ВЕРТОЛЕТА | 2011 |
|
RU2485017C2 |
| АВТОМАТ ПЕРЕКОСА ВЕРТОЛЕТА | 2019 |
|
RU2728945C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВАЛОВА ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ЭЛАСТИЧНОЙ ЛОПАСТИ НЕСУЩЕГО ВИНТА КОМБИНИРОВАННОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2043948C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2013 |
|
RU2648502C2 |
| Соосный несущий винт винтокрылого летательного аппарата | 2021 |
|
RU2756861C1 |
| НЕСУЩИЙ ВИНТ ВЕРТОЛЕТА | 2004 |
|
RU2263048C2 |
| СИСТЕМА УПРАВЛЕНИЯ СООСНЫМ ВЕРТОЛЕТОМ | 2015 |
|
RU2613136C1 |
| НЕСУЩИЙ ВИНТ | 2005 |
|
RU2281885C1 |
| Несущая система винтокрылого летательного аппарата | 2020 |
|
RU2751654C1 |
Изобретение относится к авиации и, в частности, к системам управления несущим винтом винтокрылых летательных аппаратов. Целью изобретения является повышение безопасности полета летательного аппарата. Способ управления заключается в отклонении лопастей при помощи сервозакрылков, отклоняемых автоматом перекоса, кольцо автомата перекоса перемещают в плоскости, параллельной плоскости втулки винта, эти перемещения передают через обкатывающие ролики тросами на сервозакрылках. Устройство управления несущим винтом содержит невращающееся кольцо, опертое на рычаг, который шарнирно закреплен на качалке продольного управления, и рычаги, шарнирно закрепленные на качалке поперечного управления, по кольцу обкатывается ролик через подшипник, закрепленный на суммирующей качалке, Качалка общего шага закреплена на втулке несущего винта и опирается на ползун для изменения общего шага. Технический результат заключается в увеличении жесткости и надежности системы управления и снижении ее массы и усилий при управлении несущим винтом и повышении управляемости несущего винта. 2 с.п.ф-лы, 2 ил.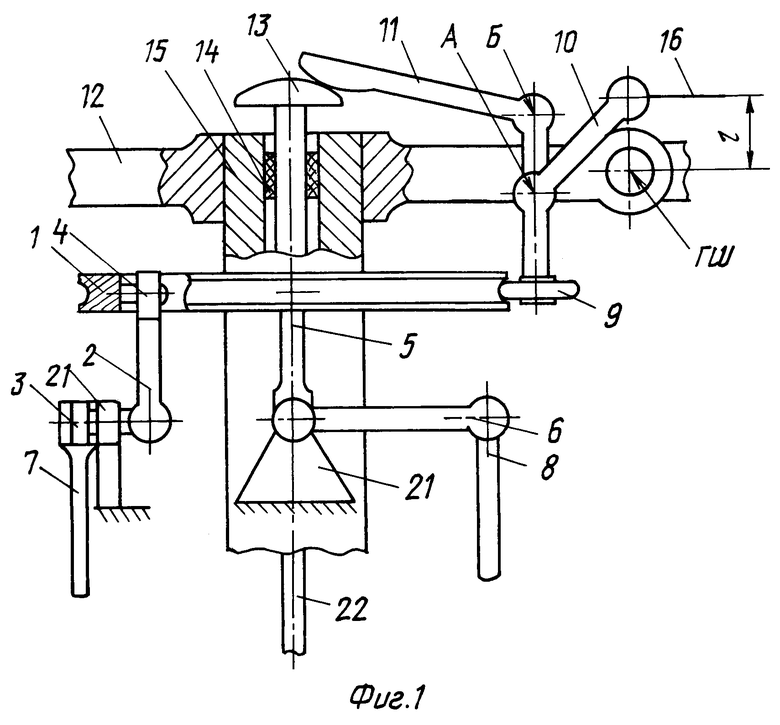
| Проектные и экспериментальные исследования скоростных вертолетов и винтокрылых аппаратов | |||
| ЦАГИ, №296, 1969 | |||
| АВТОМАТ ПЕРЕКОСА НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 1994 |
|
RU2088479C1 |
| Изаксон А.Н | |||
| Советское вертолетостроение | |||
| М.: Машиностроение, 1981, с.162, 251 | |||
| US 5409183 А, 25.04.1995. | |||

