Изобретение относится к механизмам, используемым в прессовых машинах, основанных на эффекте перекатывающихся рычагов. Этот класс машин широко используется в технике и представлен в справочнике [1] пятнадцатью конструкциями.
В основе создания таких машин лежит использование высших кинематических пар или пар четвертого класса. Подвижность таких машин определяется по формуле Чебышева П.Л., имеющей общий вид

где n - число подвижных звеньев,
р5 - число используемых пар пятого класса,
р4 - число используемых пар четвертого класса.
Известен рычажно-кулачковый механизм перекатывающихся рычагов [1, стр. 592, механизм №1710], в котором специально выполненный рычаг, перекатываясь со скольжением по опоре, воздействует на поступательно движущееся выходное звено, которое, перемещаясь, производит работу прессования.
Наиболее близким к предлагаемому механизму является механизм с перекатывающимся рычагом [2]. Работает механизм-прототип следующим образом: при вращении кривошипа, он через шатун передает движение на перекатывающийся рычаг, который, опираясь на упор и поворачиваясь относительно упора, воздействует на выходное звено, которое производит работу, деформируя деталь. Недостатком прототипа является то обстоятельство, что в его высших кинематических парах имеет место проскальзывание. Трение скольжения, как известно, уменьшает износостойкость звеньев и КПД механизма.
Задачей настоящего изобретения является обеспечение чистого качения в высших кинематических парах. Это достигается проектированием формы перекатывающегося рычага.
Сущность изобретения заключается в том, что предлагается механизм с перекатывающимся рычагом, включающий последовательно соединенные кривошип, шатун, перекатывающийся по неподвижному звену рычаг, выходное звено и коромысло, в котором перекатывающийся рычаг представляет собой двухслойное звено, рабочие поверхности которого выполнены по дугам окружностей с радиусами, обеспечивающими перекатывание рычага без скольжения как по неподвижному звену, так и по поверхности поступательно движущегося выходного звена.
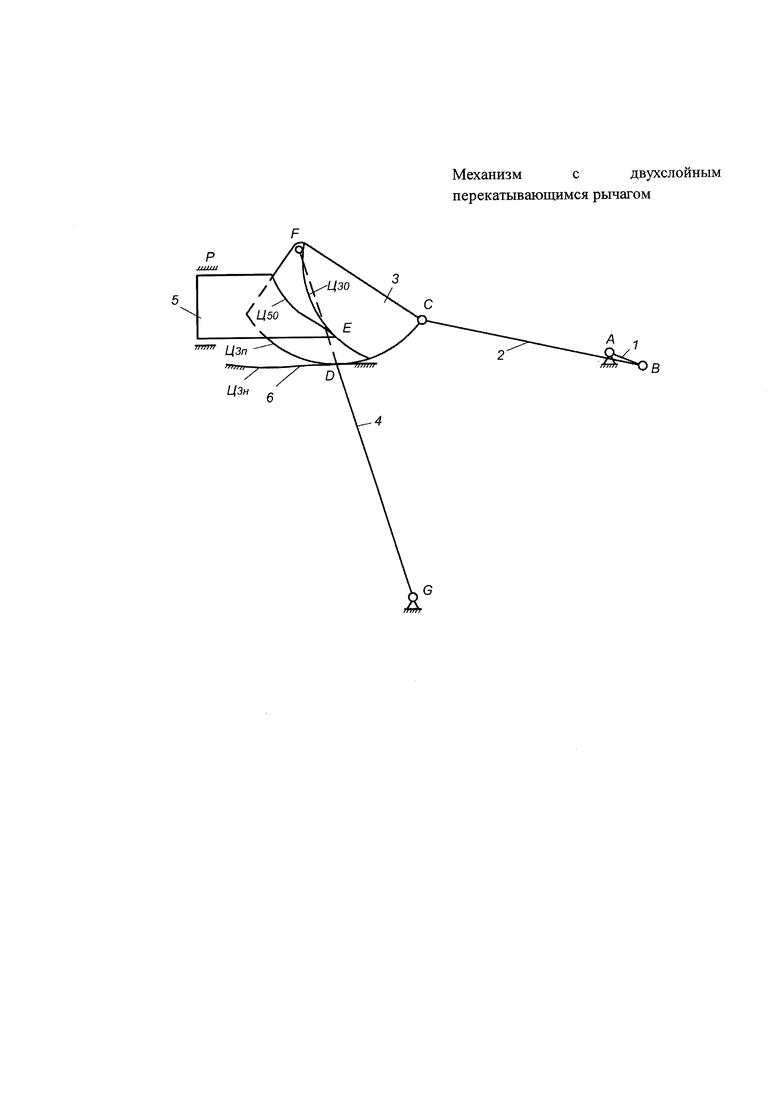
Общий вид предлагаемого механизма показан на чертеже. Механизм состоит из кривошипа 1, соединенного с шатуном 2 через вращательную кинематическую пару В, шатун 2 входит с перекатывающимся рычагом 3 во вращательную кинематическую пару С, при этом рычаг 3 соединен с коромыслом 4 и выходным звеном 5. Посредством коромысла 4 рычаг 3 соединен с неподвижным звеном (стойкой) 6 через вращательные кинематические пары F и G. Рычаг 3 перекатывается без скольжения по неподвижному звену 6, образуя высшую кинематическую пару D. Пара D представляет собой взаимодействие подвижной Ц3п и неподвижной Ц3н центроид в абсолютном движении рычага 3. Через пару качения Е рычаг 3 входит в контакт с выходным звеном 5, осуществляющим поступательное движение и воздействие на обрабатываемый объект. В высшей паре Е происходит взаимодействие центроид в относительном движении рычага 3 (Ц30) и выходного звена 5 (Ц50). Возвратно-поступательное движение выходного звена 5 осуществляется перекатыванием без скольжения рычага 3 по неподвижному звену 6. Механизм выполнен в четырех параллельных слоях. Так, кривошип 1 находится в первом слое, шатун 2 и коромысло 4 - во втором слое, подвижная центроида Ц3п рычага 3, перекатывающаяся по неподвижному звену 6 - в третьем слое, а центроида Ц30 рычага 3 и выходное звено 5 - в четвертом слое.
Механизм при этом оказывается вполне работоспособным, что доказывается по приведенной выше формуле. В предлагаемом механизме число подвижных звеньев n равно 5, куда входят кривошип 1, шатун 2, перекатывающийся рычаг 3, коромысло 4, выходное звено 5. Число одноподвижных кинематических пар p5 равно 6, а именно вращательные кинематические пары: А - кривошип 1 с неподвижным звеном 6, В - шатун 2 с кривошипом 1, С - перекатывающийся рычаг 3 с шатуном 2, F - коромысло 4 с перекатывающимся рычагом 3, G - неподвижное звено 6 с коромыслом 4 и поступательная кинематическая пара Р выходного звена 5 с неподвижным звеном 6. Число высших кинематических пар р4 равно 2, а именно Е - перекатывающийся рычаг 3 с выходным звеном 5, D - перекатывающийся рычаг 3 с неподвижным звеном 6. Таким образом, по формуле (1) получим, что подвижность механизма W=3⋅5-2⋅6-2=1, т.е. достаточно задать движение кривошипу 1, чтобы все остальные звенья двигались вполне определенно.
Источники информации
1. Артоболевский И.И. Механизмы в современной технике, том 2, издательство «Наука», Москва, 1971
2. Пат. RU №2514322, C1, МПК F16H 21/16. Механизм с перекатывающимся рычагом / Дворников Л.Т., Максимова Е.Н. - №2012155035; заяв. 18.12.2012. - Опубл. 27.04.2014, Бюл. №12-4 с.; 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ С ПЕРЕКАТЫВАЮЩИМСЯ РЫЧАГОМ | 2012 |
|
RU2514322C1 |
| Механизм с перекатывающимся рычагом | 2016 |
|
RU2610142C1 |
| ПЯТИЗВЕННЫЙ МЕХАНИЗМ С ПЕРЕКАТЫВАЮЩИМСЯ РЫЧАГОМ | 2013 |
|
RU2554177C2 |
| Двухтактный поршневой двигатель внутреннего сгорания | 2022 |
|
RU2787437C1 |
| СПОСОБ СОЗДАНИЯ ПОСТУПАТЕЛЬНО-ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ РАБОЧЕГО ОРГАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2767083C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ ШУМАТОВА (ВАРИАНТЫ) | 2014 |
|
RU2577966C1 |
| СПОСОБ ВЫПОЛНЕНИЯ РАБОЧЕГО ОБЪЕМА ДВИГАТЕЛЯ (ТЕПЛОВОЙ МАШИНЫ) | 2001 |
|
RU2213873C2 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| Привод игол двухфонтурной основовязальной машины | 1973 |
|
SU473774A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ ЯРИМОВА | 2005 |
|
RU2290520C1 |
Изобретение относится к области машиностроения, а более конкретно к рычажным механизмам, используемым в прессовых машинах, основанных на эффекте перекатывающихся рычагов. Механизм с двухслойным перекатывающимся рычагом включает последовательно соединенные кривошип, шатун, перекатывающийся по неподвижному звену рычаг, выходное звено и коромысло. Перекатывающийся рычаг представляет собой двухслойное звено, рабочие поверхности которого выполнены по дугам окружностей. Радиусы дуг окружностей обеспечивают перекатывание рычага без скольжения как по неподвижному звену, так и по поверхности поступательно движущегося выходного звена. Достигается чистое качение. 1 ил.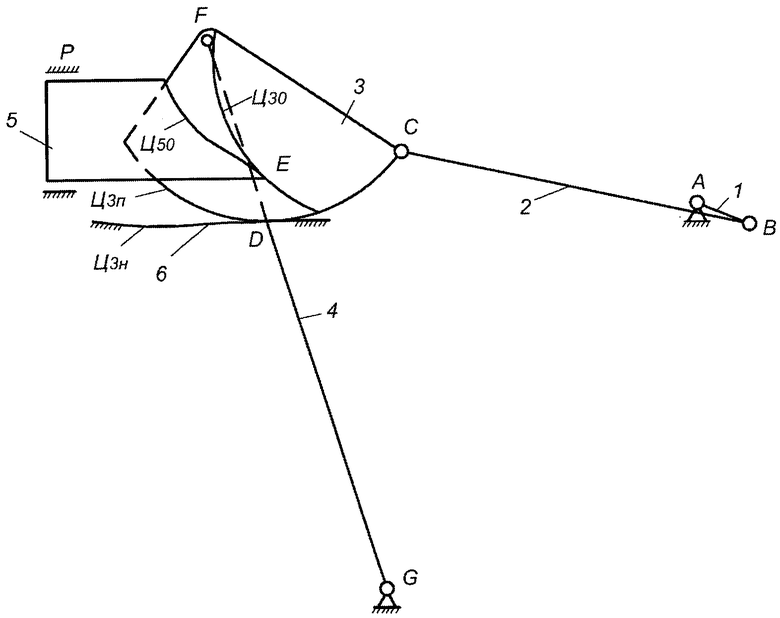
Механизм с двухслойным перекатывающимся рычагом, включающий последовательно соединенные кривошип, шатун, перекатывающийся по неподвижному звену рычаг, выходное звено и коромысло, отличающийся тем, что перекатывающийся рычаг представляет собой двухслойное звено, рабочие поверхности которого выполнены по дугам окружностей с радиусами, обеспечивающими перекатывание рычага без скольжения, как по неподвижному звену, так и по поверхности поступательно движущегося выходного звена.
| МЕХАНИЗМ С ПЕРЕКАТЫВАЮЩИМСЯ РЫЧАГОМ | 2012 |
|
RU2514322C1 |
| ПРЕСС ДЛЯ УТИЛИЗАЦИИ КУЗОВА АВТОМОБИЛЯ | 2012 |
|
RU2525024C2 |
| КОРОБКА ПЕРЕДАЧ | 2009 |
|
RU2391588C1 |
| Артоболевский И.И | |||
| "Механизмы в современной технике", 2-е изд., переработанное | |||
| т | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Способ закалки пил | 1915 |
|
SU140A1 |
| US 5775216 A1, 07.07.1998. | |||

