Изобретение относится к механизмам, используемым в прессовых машинах, основанных на эффекте перекатывающихся рычагов. Этот класс машин широко используется в технике и представлен в справочнике [1] пятнадцатью конструкциями.
В основе создания таких машин лежит использование высших кинематических пар или пар четвертого класса, которые заменяют обычные шарниры, т.е. кинематические пары пятого класса. Формула подвижности плоских механизмов с парами р4 [2] имеет вид

где n - число подвижных звеньев,
p5 - число используемых пар пятого класса,
P4 - число используемых пар четвертого класса.
Известен рычажно-кулачковый механизм перекатывающихся рычагов [1, стр.592, механизм №1711], в котором специально выполненные рычаги, перекатываясь друг по другу без скольжения, воздействуют на выходное звено, которое, перемещаясь, производит работу.
Наиболее близким к предлагаемому механизму с перекатывающимся рычагом является механизм, приведенный в [1, стр.597, механизм №1719]. Работает механизм-прототип следующим образом: при вращении кривошипа, он через шатун передает движение на перекатывающийся рычаг, который, опираясь на упор и перекатываясь со скольжением, производит работу, например, по перемещению тела (ленты).
Недостатком прототипа является то обстоятельство, что непосредственное воздействие на обрабатываемый объект передается через перекатывающийся рычаг, соединенный в две вращательные кинематические пары p5, не гарантирующие их от поломок при больших усилиях.
Задачей настоящего изобретения является обеспечение большей прочности всего устройства. Это достигается конструкцией механизма, при которой перекатывающийся рычаг выполнен двухпарным, а именно с шатуном соединен через вращательную кинематическую пару, а с неподвижным звеном соединен через высшую кинематическую пару.
Сущность изобретения заключается в том, что предлагается механизм с перекатывающимся рычагом, включающий кривошип, шатун, коромысло и перекатывающийся по неподвижному звену рычаг, который соединен с шатуном посредством вращательной кинематической пары p5, а с неподвижным звеном посредством высшей кинематической пары p4.
Общий вид предлагаемого механизма показан на чертеже. Механизм состоит из кривошипа 1, соединенного с шатуном 2 через вращательную кинематическую пару A, шатун 2 входит с коромыслом 3 во вращательную кинематическую пару B, шатун 2 входит с перекатывающимся рычагом 4 во вращательную кинематическую пару C, при этом рычаг 4 перекатывается со скольжением по неподвижному звену 5, образуя высшую кинематическую пару D, посредством которой рычаг 4 осуществляет воздействие на обрабатываемый объект.
Механизм при этом оказывается вполне работоспособным, что доказывается по приведенной выше формуле. В предлагаемом механизме число подвижных звеньев n равно 4, куда входят кривошип 1, шатун 2, коромысло 3, перекатывающийся рычаг 4. Число одноподвижных кинематических пар p5 равно 5, а именно вращательные кинематические пары: O1 - кривошип 1 с неподвижным звеном 5, A - шатун 2 с кривошипом 1, В - коромысло 3 с шатуном 2, C - перекатывающийся рычаг 4 с шатуном 2, O2 - коромысло 3 с неподвижным звеном 5. Число высших кинематических пар p4 равно 1, а именно D - перекатывающийся рычаг 4 с неподвижным звеном 5. Таким образом, по формуле (1) получим, что подвижность механизма W=3·4-2·5-1=1, т.е. достаточно задать движение кривошипу 1, чтобы все остальные звенья двигались вполне определенно.
Источники информации
1. Артоболевский И.И. Механизмы в современной технике т. II. М.: Наука, 1971. 1007 с.
2. Артоболевский И.И. Теория механизмов. М: Наука, 1967. 719 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ С ПЕРЕКАТЫВАЮЩИМСЯ РЫЧАГОМ | 2012 |
|
RU2514322C1 |
| Механизм с перекатывающимся рычагом | 2016 |
|
RU2610142C1 |
| Механизм с двухслойным перекатывающимся рычагом | 2016 |
|
RU2632558C1 |
| ПРОСТРАНСТВЕННЫЙ КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ ВТОРОГО СЕМЕЙСТВА | 2010 |
|
RU2422703C1 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ ТРЕХСАТЕЛЛИТНЫЙ ПЛАНЕТАРНЫЙ РЕДУКТОР | 2013 |
|
RU2541049C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2014 |
|
RU2557322C1 |
| ЧЕТЫРЁХСАТЕЛЛИТНЫЙ ПЛАНЕТАРНЫЙ РЕДУКТОР | 2012 |
|
RU2499929C1 |
| БУРОВОЙ АГРЕГАТ ДЛЯ СТРОЧНОГО БУРЕНИЯ ШПУРОВ | 1997 |
|
RU2130545C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ ВИНТО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2015 |
|
RU2595101C1 |
| УРАВНОВЕШЕННЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2014 |
|
RU2583329C2 |
Изобретение относится к машиностроению, а именно к механизмам, используемым в прессовых машинах, основанных на эффекте перекатывающихся рычагов. Механизм с перекатывающимся двухпарным рычагом содержит кривошип, шатун, коромысло и перекатывающийся по неподвижному звену рычаг, который соединен с шатуном посредством вращательной кинематической пары, а с неподвижным звеном посредством высшей кинематической пары. Достигается обеспечение большей прочности всего устройства. 1 ил.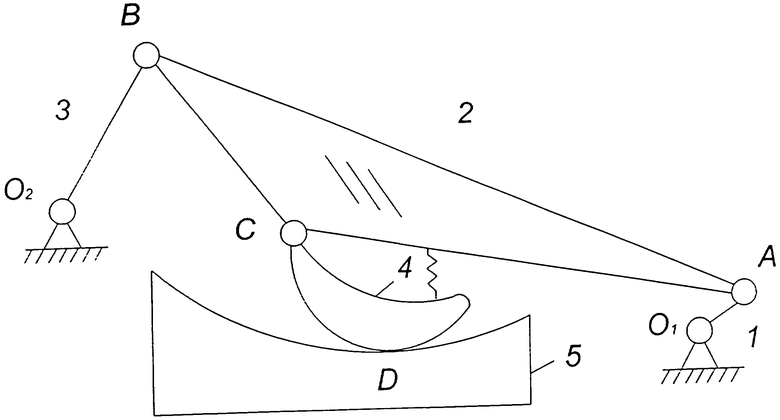
Механизм с перекатывающимся рычагом, включающий кривошип, шатун, коромысло, перекатывающийся по неподвижному звену рычаг, отличающийся тем, что перекатывающийся рычаг выполнен двухпарным, соединенный с шатуном через вращательную кинематическую пару, а с неподвижным звеном - через высшую кинематическую пару.
| Крайнев А.Ф | |||
| "Словарь-справочник по механизмам", 2-е изд., Москва, Машиностроение, 1987, с | |||
| ТЕЛЕФОННЫЙ АППАРАТ, ОТЗЫВАЮЩИЙСЯ ТОЛЬКО НА ВХОДЯЩИЕ ТОКИ | 1921 |
|
SU275A1 |
| в) | |||
| Двигатель внутреннего горения | 1923 |
|
SU903A1 |
| РУССКАЯ ПЕЧЬ С ПЛИТОЙ И ДЫМООБОРОТАМИ | 1923 |
|
SU904A1 |

