Изобретение относится к машиностроению, в частности, к способу создания механизмов с рабочим органом, совершающим поступательно-вращательное движение, например, параллелограмма для привода колес локомотива, механизма соломотряса и др. и устройству для его осуществления.
Известны способы создания поступательно-вращательного движения рабочего органа многократными параллелограммами, состоящими из нескольких шарнирных параллелограммов (см. Ермак В.Н. Многократные параллелограммы без избыточных связей. Вестник Кузбасского государственного технического университета. Теория механизмов и машин. Кемерово. 2005. С. 88-90).
Недостатки этих способов:
1. Эти способы не устраняют мертвые положения механизма, в которых звенья располагаются по одной прямой и должны иметь абсолютно точные размеры. Даже малые отклонения от точных размеров, приводят к большим силовым напряжениям и разрушениям механизма. Использование пространственных схем приводит к существенному увеличению числа звеньев и к усложнению механизма.
2. Сложность конструкций сдвоенного и строенного параллелограммов.
Известен способ создания поступательно-вращательного движения рабочего органа механизмом шарнирного параллелограмма, в котором мертвое положение устраняют путем смены элементов вращательной пары на элементы поступательной пары в одном из шарниров (см. Иванов К.С., Погребной М.А. Механизм шарнирного параллелограмма. Авторское свидетельство СССР № 754143. Бюллетень №29. 1980).
Недостатком этого способа является неопределенность мертвого положения в момент смены элементов кинематической пары. Это приводит к ударам и заклиниванию.
Наиболее близким по технической сущности к заявляемому изобретению является способ создания поступательно-вращательного движения рабочего органа обычным параллелограммом Уатта (см. Артоболевский И.И. Механизмы в современной технике. Т. 1. М. Наука. 1980).
Этот способ состоит в том, что на рабочий орган, присоединенный к кривошипу, накладывают вынуждающую связь, обеспечивающую поступательное движение по окружности радиуса кривошипа.
Недостатки этого способа:
1. Этот способ имеет мертвые положения механизма, в которых звенья располагаются по одной прямой и должны иметь абсолютно точные размеры. В общем случае мертвые положения создают неопределенность движения, которую необходимо преодолевать вышеописанными методами.
2. Сложность конструкции, содержащей три звена.
3. Низкая эффективность, надежность и качество работы.
Задачей изобретения является устранение избыточных связей и мертвых положений, упрощение конструкции, повышение эффективности, повышение надежности и улучшение качества работы.
Задача изобретения решается тем, что вынуждающую связь создают двумя высшими кинематическими парами, соединяющими рабочий орган с неподвижными поверхностями в виде окружностей радиуса кривошипа.
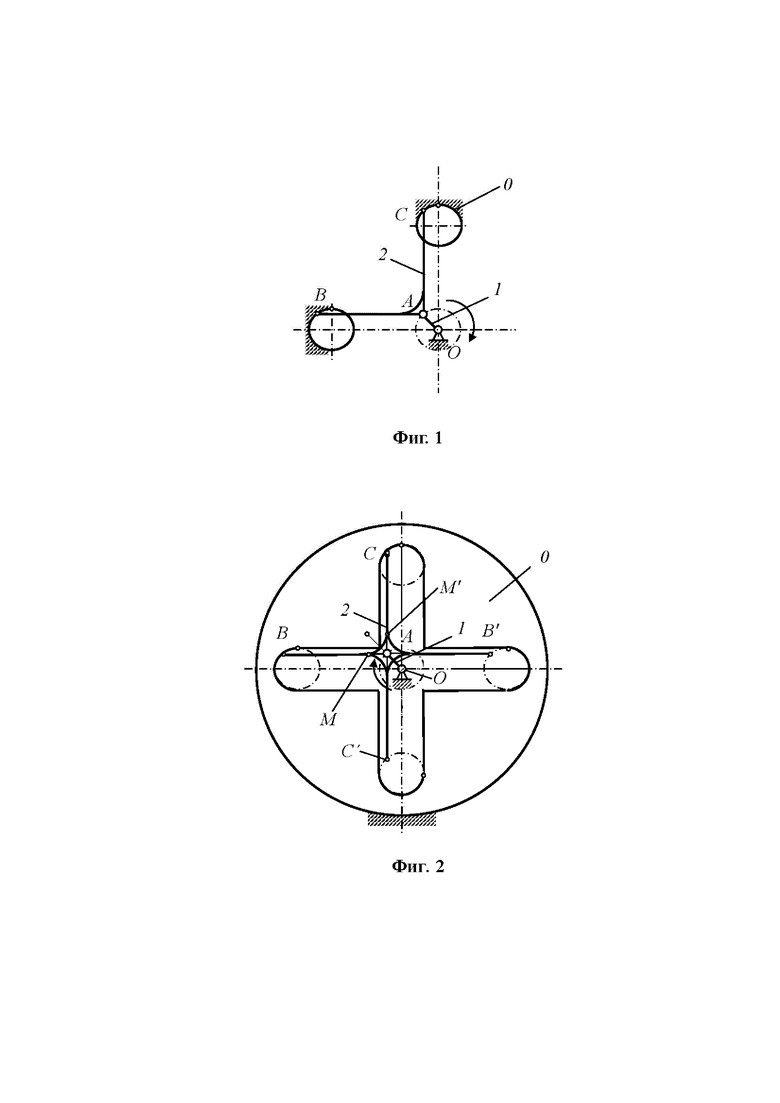
На фиг.1 изображено устройство, осуществляющее способ создания вращательно-поступательного движения.
Устройство содержит два звена - кривошип 1 с неподвижным шарниром 






Способ осуществляется следующим образом.
Кривошип 1 перемещает шарнир 

Предлагаемый способ можно существенно улучшить, если использовать устройство, обеспечивающее последовательную смену взаимодействующих элементов во время движения.
На фиг. 2 показано осуществление способа таким устройством.
Это устройство содержит жестко присоединенные к основному шатуну 2 элементы 




Во время работы кривошип и шатун перемещаются в свободном замкнутом пространстве неподвижного корпуса. (Разработана компьютерная анимационная модель).
Когда точка 







Взаимодействие прямолинейных участков шатуна с неподвижным корпусом в мертвых положениях позволяет создавать в этих положениях гарантированный зазор между контактирующими поверхностями и точками для устранения избыточных связей. Способ обеспечивает исключение избыточных связей, которые могут иметь место в крайних положениях параллелограмма.
Известны устройства для создания поступательно-вращательного движения рабочего органа многократными параллелограммами, состоящими из нескольких шарнирных параллелограммов (см. Ермак В.Н. Многократные параллелограммы без избыточных связей. Вестник Кузбасского государственного технического университета. Теория механизмов и машин. Кемерово. 2005. С. 88-90).
Недостатки этих устройств:
1. Эти устройства не устраняют мертвые положения механизма, в которых звенья располагаются по одной прямой и должны иметь абсолютно точные размеры. Даже малые отклонения от точных размеров, приводят к большим силовым напряжениям и разрушениям механизма. Использование пространственных схем приводит к существенному увеличению числа звеньев и к усложнению механизма.
2. Сложность конструкций сдвоенного и строенного параллелограммов.
Известно устройство для создания поступательно-вращательного движения рабочего органа в виде механизма шарнирного параллелограмма, в котором для устранения мертвого положения вращательная пара, соединяющая шатун с выходным кривошипом, выполнена с элементами поступательной пары (см. Иванов К.С., Погребной М.А. Механизм шарнирного параллелограмма. Авторское свидетельство СССР № 754143. Бюллетень №29. 1980).
Недостатком этого устройства является неопределенность мертвого положения в момент смены элементов кинематической пары. Это приводит к ударам и заклиниванию.
Наиболее близким по технической сущности к заявляемому изобретению является устройство в виде обычного параллелограмма Уатта (см. Артоболевский И.И. Механизмы в современной технике. Т. 1. М. Наука. 1980).
Это устройство содержит рабочий орган, присоединенный к кривошипу, и имеющий вынуждающую связь, обеспечивающую поступательное движение по окружности радиуса кривошипа.
Недостатки этого устройства:
1. Это устройство имеет мертвые положения механизма, в которых звенья располагаются по одной прямой и должны иметь абсолютно точные размеры. В общем случае мертвые положения создают неопределенность движения, которую необходимо преодолевать вышеописанными методами.
2. Сложность конструкции, содержащей три звена.
3. Низкая эффективность, надежность и качество работы.
Задачей изобретения является устранение избыточных связей и мертвых положений, упрощение конструкции, повышение эффективности, повышение надежности и улучшение качества работы.
Задача изобретения решается тем, что вынуждающая связь выполнена в виде двух высших кинематических пар, соединяющими рабочий орган с неподвижными поверхностями в виде окружностей радиуса кривошипа.
На фиг. 1 изображено устройство для создания вращательно-поступательно-вращательного движения.
Устройство содержит два звена - кривошип 1 с неподвижным шарниром
Устройство работает следующим образом.
Кривошип 1 перемещает шарнир
Предлагаемое устройство можно существенно улучшить, если дополнить его конструкцию элементами, обеспечивающими последовательную смену взаимодействующих элементов во время движения.
На фиг. 2 показано устройство, дополненное указанными элементами.
Это устройство содержит жестко присоединенные к основному шатуну 2 стержни
Во время работы кривошип и шатун перемещаются в свободном замкнутом пространстве неподвижного корпуса. (Разработана компьютерная анимационная модель).
Когда точка
Взаимодействие прямолинейных участков шатуна с неподвижным корпусом в мертвых положениях позволяет создавать в этих положениях гарантированный зазор между контактирующими поверхностями и точками для устранения избыточных связей. Устройство обеспечивает исключение избыточных связей, которые могут иметь место в крайних положениях параллелограмма.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО И НЕПРЕРЫВНОГО ИЗМЕНЕНИЯ КРУТЯЩЕГО МОМЕНТА И СКОРОСТИ ВРАЩЕНИЯ ВЫХОДНОГО ВАЛА В ЗАВИСИМОСТИ ОТ СОПРОТИВЛЕНИЯ ДВИЖЕНИЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2398989C2 |
| Кривошипно-кулисный передаточный механизм с выстоем | 1988 |
|
SU1518602A1 |
| Автооператор | 1991 |
|
SU1799726A1 |
| Кривошипно-кулисный передаточный механизм с выстоем | 1990 |
|
SU1793136A1 |
| Шарнирно-рычажный механизм | 1980 |
|
SU1113609A1 |
| Шарнирно-рычажный направляющий механизм с переменной длиной звена | 1990 |
|
SU1783201A1 |
| Шарнирно-рычажный механизм с двумя выстоями | 1989 |
|
SU1629647A1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
| Шарнирно-рычажный механизм с остановками | 1985 |
|
SU1234691A1 |
| Устройство для преобразования вращательного движения в возвратно-поступательное и наоборот (его варианты) | 1983 |
|
SU1173108A1 |
Группа изобретений относится к области машиностроения, в частности к способу создания механизмов с рабочим органом, совершающим поступательно-вращательное движение, и устройству для реализации способа. Способ создания поступательно-вращательного движения рабочего органа, при котором на рабочий орган, присоединенный к кривошипу, накладывают вынуждающую связь, обеспечивающую поступательное движение по окружности радиуса кривошипа. Вынуждающую связь создают двумя высшими кинематическими парами, соединяющими рабочий орган с неподвижными поверхностями в виде окружностей радиуса кривошипа. Высшие кинематические пары повторяют многократно, создавая последовательную смену взаимодействующих элементов во время движения. Устройство для создания поступательно-вращательного движения рабочего органа содержит вынуждающая связь в виде двух высших кинематических пар, расположенных на прямолинейных участках рабочего органа с возможностью взаимодействия с неподвижными поверхностями в виде полуокружностей, сопряженных с прямолинейными пазами в неподвижном корпусе, и выполненных многократно. Достигается упрощение конструкции. 2 н. и 1 з.п. ф-лы, 2 ил.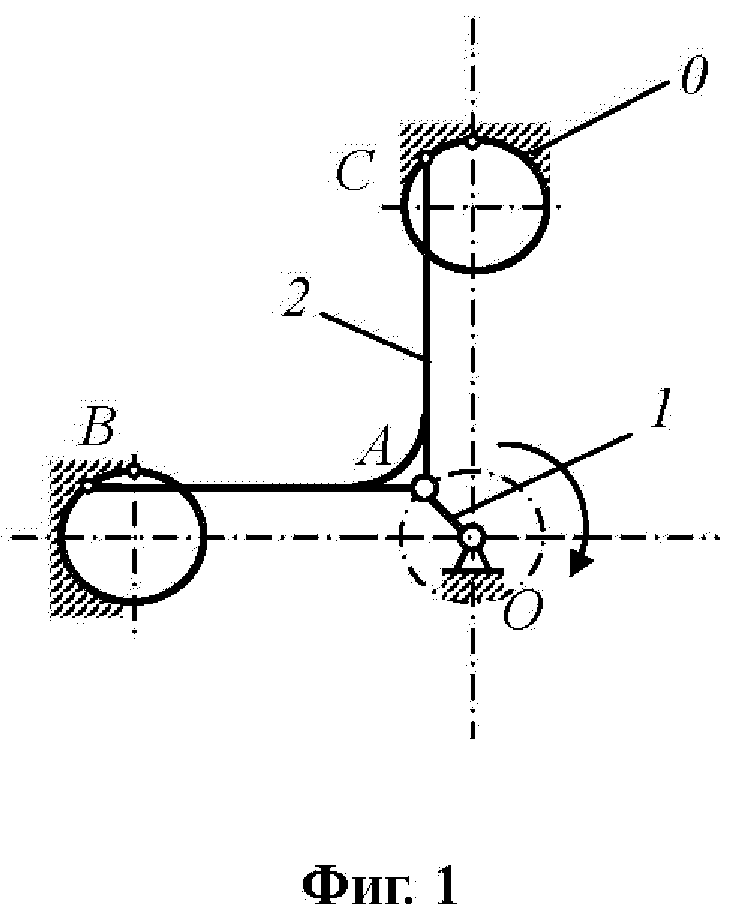
1. Способ создания поступательно-вращательного движения рабочего органа, при котором на рабочий орган, присоединенный к кривошипу, накладывают вынуждающую связь, обеспечивающую поступательное движение по окружности радиуса кривошипа, отличающийся тем, что вынуждающую связь создают двумя высшими кинематическими парами, соединяющими рабочий орган с неподвижными поверхностями в виде окружностей радиуса кривошипа.
2. Способ по п. 1, отличающийся тем, что высшие кинематические пары повторяют многократно, создавая последовательную смену взаимодействующих элементов во время движения.
3. Устройство для создания поступательно-вращательного движения рабочего органа, содержащее рабочий орган, шарнирно присоединенный к кривошипу и имеющий вынуждающую связь, обеспечивающую поступательное движение по окружности радиуса кривошипа, отличающееся тем, что вынуждающая связь выполнена в виде двух высших кинематических пар, расположенных на прямолинейных участках рабочего органа с возможностью взаимодействия с неподвижными поверхностями в виде полуокружностей, сопряженных с прямолинейными пазами в неподвижном корпусе, и выполненных многократно.
| Механизмы | |||
| Справочник | |||
| Изд | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| и доп | |||
| Под ред | |||
| С.Н | |||
| Кожевникова, М., "Машиностроение", 1976, стр | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Артоболевский И.И | |||
| "Механизмы в современной технике", т | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| второе, перераб., стр | |||
| Прибор для исправления снимков рельефа местности | 1921 |
|
SU301A1 |
| Промывально-чесальная машина для выделения волокон из хвои | 1920 |
|
SU590A1 |
| Кривошипно-ползунный дезаксиальный механизм | 1988 |
|
SU1613751A1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ С КРУГОВОЙ НАПРАВЛЯЮЩЕЙ ЯРИМОВА | 1992 |
|
RU2092731C1 |
| Шарнирно-рычажный механизм с остановками | 1991 |
|
SU1825924A1 |
| JP 60032057 B, | |||

