Область техники, к которой относится изобретение
Изобретение «Способ и система повышения точности определения местоположения пользователей глобальных спутниковых навигационных систем с использованием цифровой разметки участков улично-дорожной сети» относится к задаче определения местоположения объектов, и, в частности, к способам вычисления дифференциальных поправок, используемых для корректировки измеренных координат с целью повышения точности позиционирования.
Уровень техники
Современные технологии определения местоположения играют одну из важных ролей в развитии целого ряда отраслей народного хозяйства. Ключевое место в данном ряду по праву занимают глобальные спутниковые навигационные системы. В настоящее время в мире существуют или создаются несколько подобных систем. Полностью функционирующими являются системы GPS Navstar (США) и ГЛОНАСС (РФ). В процессе создания находятся системы Galileo (ЕС) и BeiDou (КНР).
Спутниковые навигационные системы используются для решения множества задач - в авиационных и морских перевозках, для мониторинга зданий и строительных объектов, в сельском хозяйстве, при проведении геодезических работ и составлении карт. Отдельно следует упомянуть автомобильную навигацию. В настоящее время сложно представить автолюбителя, который хотя бы раз не использовал отдельное устройство, мобильный телефон или планшетный компьютер с установленной на них навигационной программой. Современные навигационные программы входят в категорию одних из самых популярных программ в существующих магазинах приложений (Google Play, AppStore, Windows Store). Навигационные технологии успешно применяются для контроля за автотранспортом, осуществляющим пассажирские и грузовые перевозки. Современные системы мониторинга и управления транспортом снижают затраты на перевозку людей и грузов, а также позволяют экономить топливо, оптимизировать логистику и уменьшить выбросы в атмосферу - все это дает значительный экономический эффект.
Зарубежные автомобильные корпорации встраивают оборудование для работы со спутниковыми навигационными системами в некоторые модели автомобилей в качестве штатного оборудования. Пока это лишь дорогие модели, но наблюдается тенденция к комплектации терминалами навигационных систем моделей среднего ценового диапазона. Можно не сомневаться, что рано или поздно оборудование для приема сигналов спутниковых навигационных систем станет обязательным компонентом любого автомобиля.
В Российской Федерации разработана и внедрена государственная система экстренного реагирования при возникновении ДТП или других чрезвычайных ситуаций ЭРА-ГЛОНАСС, охватывающая все автомобильные дороги страны. С 1 января 2017 года транспортные средства категорий M1 и N1, выпускаемые в обращение на территории стран Таможенного союза, должны быть оборудованы бортовыми терминалами данной системы, то есть иметь возможность определять свое местоположение с использованием спутниковых навигационных систем.
Помимо автомобильной навигации, технологии определения местоположения пользователей активно внедряются многими производителями программных систем в игровой индустрии, в социальных и геосервисах, а также широко используется в рекламных целях для таргетирования пользователей по их местоположению.
Навигационной задачей в спутниковой навигационной системе называется процедура нахождения пространственно-временных координат потребителя и составляющих вектора его скорости, которые в совокупности называются вектором потребителя. В общем случае, в результате решения навигационной задачи должны быть найдены пространственные координаты потребителя {х,у,z}, поправка Δt к шкале времени потребителя относительно шкалы времени спутниковой навигационной системы, а также составляющие вектора скорости {vx, vy, vz} как производные координат потребителя по времени.
Элементы вектора потребителя недоступны непосредственно измерению с помощью радиосредств. У принятого радиосигнала измеряются так называемые радионавигационные параметры - задержку при его распространении τ и доплеровское смещение частоты ƒдоп. Соответствующие данным параметрам геометрические параметры (дальность до спутника D и радиальная скорость сближения Vp) называются навигационным. Функциональная связь между навигационными параметрами и вектором потребителя называется навигационной функцией. Конкретный вид данной функции определяется многими факторами: системой координат, характером движения потребителя и т.д.
В современных спутниковых навигационных системах для нахождения координат потребителя применяется псевдодальномерный метод, суть которого заключается в вычислении «условных» расстояний от определяемой точки до спутников. Информация о движении спутников, которая передается в навигационном сообщении на устройство потребителя, формируется в геоцентрической подвижной системе координат. В этой же системе координат в устройстве рассчитываются координаты самого потребителя.
Однако, все решаемые навигационные задачи используют геодезические координаты, которые описывают расположение объектов относительно поверхности Земли. При этом, физическая модель Земли представляет собой эллипсоид с большой полуосью а, лежащей в экваториальной плоскости, и малой полуосью b. Геодезическая широта - это величина угла В между нормалью к поверхности эллипсоида и плоскостью экватора. Геодезическая долгота - величина угла L между плоскостью начального меридиана и плоскостью меридиана, проходящего через объект. Положительное направление отсчета долгот - от начального меридиана к востоку. Геодезическая высота - расстояние Н по нормали от объекта до поверхности эллипсоида. Параметры эллипсоида а и b, а также начальный меридиан и другие параметры, задаются используемой системой геодезических параметров (например, ПЗ-90 или WGS-84).
В реальных условиях на точность определения вектора потребителя влияет множество факторов. Применительно к псевдодальномерному методу источники возникновения погрешностей вычисления навигационных параметров можно разделить на следующие группы по их происхождению:
- вносимые контрольно-измерительным комплексом;
- вносимые оборудованием навигационного спутника;
- возникающие на пути распространения радиосигнала;
- вносимые приемником потребителя.
В число погрешностей контрольно-измерительного комплекса входят ошибки из-за ухода шкал времени спутников и эфемеридные погрешности. Эфемеридные погрешности обусловлены неточностью расчета местоположений навигационных спутников относительно их реальных орбит на момент излучения радиосигнала.
Погрешности, возникающие на трассе распространения сигнала, относятся к наименее предсказуемым и, в силу этого, могут значительно влиять на точность определения местоположения. Атмосфера Земли влияет на распространение радиоволн, причем это влияния не всегда поддается точному прогнозированию. На распространение радиоволн оказывает влияние тропосфера, расположенная у поверхности Земли до высоты 12-18 км, и ионосфера, представляющая собой слой атмосферы от 60 до 1000 км.
Рефракция радиосигналов в тропосфере и ионосфере, обусловленная неоднородностями и изменением диэлектрической проницаемости с высотой, вносит дополнительные задержки распространения сигнала. При малых углах места тропосферная и ионосферная рефракции достигает максимума, так как радиоволны проходят при таких углах наибольший путь. В связи с этим, в навигационных приемниках принимают во внимание только те спутники, которые находятся выше так называемого угла маски, составляющего величину около 5-10 градусов.
Значение тропосферной рефракции зависит от факторов, влияние которых хорошо изучено и поддается прогнозированию (влажность воздуха, атмосферное давление, температура). В то же время, основная проблема при компенсации ионосферной задержки состоит в том, что ее значение очень широко меняется в зависимости от региона, в котором расположен потребитель, времени суток и года, солнечной и геомагнитной активности. Значения задержки лежат в диапазоне от 5 до 500 нс, при этом среднее значение составляет 5-10 нс ночью и 30-50 нс днем для углов места, близких к 90 градусов. С приближением к углу маски ионосферная задержка возрастает в 2-3 раза. Обычно ночным влиянием ионосферы пренебрегают. Известно, что ионосферные задержки наиболее сильны на низких широтах.
Существуют различные методы определения и учета ионосферной задержки на стороне потребителя, например, метод моделирования трассы, двухчастотные измерения и избыточные одночастотные измерения.
Первый метод широко применяется в одночастотных приемниках. Однако, точность расчетов весьма ограничена - ионосферную погрешность удается уменьшить примерно наполовину при условии приемлемого объема вычислений. Расчет сложной параметрической модели в стационарных условиях позволяет снизить влияние ионосферной погрешности на 60-70 процентов.
Двухчастотный метод основан на эффекте рефракции сигналов в ионосфере. Эффект проявляется в том, что при распространении сигналов с разной несущей частотой вносится разная ионосферная задержка. Данный метод позволяет свести ионосферную погрешность к десяткам сантиметров, но усложняет аппаратуру потребителя и увеличивает составляющую погрешности, обусловленную радиошумами.
В соответствии с методом избыточных одночастотных измерений проводят измерения по нескольким (как правило, более 8) спутникам. Влияние ионосферы удается ощутимо снизить за счет усреднения пространственных характеристик ионосферы.
К погрешностям, возникающим на пути распространения радиосигнала, можно отнести погрешности, возникающие по причине многолучевого распространения. В реальных условиях на вход приемника обычно поступает не только прямой сигнал со спутника, но и множество переотраженных сигналов от соседних зданий и земной поверхности. Причем, в некоторых случаях, уровень отраженного сигнала может оказаться сопоставимым с уровнем прямого.
Следующим, по порядку прохождения сигнала, источником дальномерных погрешностей является схема приемника. Основным источником погрешностей здесь выступают компоненты слежения за задержкой огибающей и несущей сигнала. Принято различать шумовые и динамические погрешности.
Кроме этого, на точность определения пространственно-временных координат потребителя оказывает влияние взаимное расположение спутников и потребителя. Существует так называемый параметр GDOP (Geometric Dilution of Precision) - геометрический фактор снижения точности, определяемый взаимным расположением спутников, используемых приемником при позиционировании. На практике вместо GDOP чаще используется PDOP (Position Dilution of Precision) - фактор снижения точности определения местоположения. Кроме PDOP, используются также факторы снижения точности определения горизонтальных (HDOP) и вертикальных (VDOP) координат.
При решении навигационной задачи возникает проблема выбора оптимального рабочего созвездия навигационной системы, при котором обеспечивается оптимальная точность измерений. Рабочим созвездием спутниковой навигационной системой называется совокупность спутников из числа видимых над объектом, значения псевдодальностей до которых использовались для определения текущего местоположения. Рабочее созвездие обеспечивает определение координат с наибольшей в текущий момент времени точностью в сравнении с другими возможными вариантами созвездий.
Спутниковой навигационной системе присущи периоды неудачного расположения спутников, которые длятся от 5 до 30 минут. В такие периоды геометрический фактор сильно возрастает, а точность определения падает.
Таким образом, стандартная точность определения координат, которые обеспечивают спутниковые навигационные системы, в лучшем случае составляет около 3-5 метров. Однако, в ряде случаев требуется более высокая точность определения местоположения. К таким случаям относятся геодезические и кадастровые измерения, составление карт, строительные работы, точная проводка судов в береговой зоне, навигация в городских условиях. Добиться существенного увеличения точности определения координат (до единиц и долей сантиметров) удается при помощи функционального дополнения к спутниковым навигационным системам, называемого дифференциальной подсистемой.
Основу дифференциальной подсистемы составляют наземные контрольно-корректирующие станции (ККС), координаты которых известны и определены с большой точностью. Путем сравнения измеренных значений псевдодальностей до спутников с достоверными значениями, вычисленными на основе полученной от главной станции информации об орбитах спутников, вычисляются поправки к псевдодальностям. Полученные значения дифференциальных поправок передаются потребителям с помощью телефонной или радиосвязи, по системам спутниковой связи, а также с использованием технологии передачи цифровых данных RDS (Radio Data System) на частотах УКВ-радиостанций. При этом, потребитель должен иметь устройство, оснащенное модулем для приема и обработки данных от контрольно-корректирующей станции.
Возможность применения дифференциальными подсистемами способа повышения точности координат обусловлена тем фактом, что ряд составляющих дальномерной погрешности в течении ограниченного интервала времени являются общими, то есть коррелированными, для потребителей, расположенных в достаточно обширных районах рабочей зоны - областях так называемой пространственно-временной корреляции погрешностей. Поэтому, определив эти данные в произвольной точке указанного района, можно использовать их в течение времени корреляции для коррекции измерений в других точках.
Как правило, расстояние между потребителем и наземной ККС пренебрежимо мало по сравнению с расстоянием до спутников, находящихся на высоте около 20 тыс. километров. Поэтому, с большой долей приближения можно считать, что на расстояниях до 200-300 километров потребитель и ККС находятся в идентичном по всем параметрам навигационном поле. Следовательно, поправки, вычисленные для ККС, справедливы и для потребителя. Так, при расстоянии между ККС и потребителем, составляющем 100 километров, погрешность определения координат потребителя, вызванная непостоянством ошибок псевдодальности в пространстве, составляет единицы сантиметров, а при расстоянии до ККС порядка 1000 км - десятки сантиметров. На практике стараются располагать ККС не далее 500 километров от целевых потребителей.
При реализации дифференциального режима используют следующие методы формирования поправок:
1. Метод, при котором поправки на ККС формируются только для рабочего созвездия навигационной системы, используемого в определяемом пункте. Это является существенным недостатком метода, так как такие поправки можно использовать только для потребителей, которые используют то же самое рабочее созвездие.
2. Метод, при котором на ККС определяются поправки для всех спутников, которые потенциально могут быть использованы потребителями. Недостатком этого метода является существенное усложнение аппаратуры потребителей, вызванное необходимостью выполнения дополнительных вычислений.
При реализации дифференциального режима используются методы кодовых и псевдофазовых измерений. Кодовые системы строятся на основе измерения и обработки псевдодальностей; они имеют в общем случае неограниченную область действия и характеризуются ошибками определения координат от долей до нескольких метров. Псевдофазовые системы характеризуются высокой точностью определения относительных координат (до долей сантиметра), однако область их действия ограничивается дальностью 10-12 километров в одночастотном режиме и около 100 километров в двухчастотном.
Кодовые системы дифференциальной коррекции делятся на локальные (Local Area Differential), широкодиапазонные (Wide Area Differential) и глобальные (Global Differential).
Большинство систем дифференциальной коррекции являются локальными. Они используют одну базовую станцию, которая располагается в центре локальной зоны размером около 200 километров. При этом, в центре зоны обеспечивается точность определения порядка 0.5-1 м. При удалении от центра зоны точность постепенно ухудшается и на периферии она сопоставима с точностью измерений без использования поправок. Дифференциальные поправки в локальных системах могут формироваться путем коррекции координат или навигационных параметров. Наибольшее распространение получил второй метод, при котором базовая станция формирует поправки к измерениям псевдодальностей для каждого из видимых ею спутников. При этом, приемник корректирует свои измерения псевдодальностей по тем же спутникам. Для передачи поправок, сформированных в соответствии с методом коррекции навигационного параметра, используется специальный стандарт RTCM SC-104, учитывающий особенности навигационных систем GPS и ГЛОНАСС.
В широкодиапазонных системах дифференциальной коррекции используется сеть станций сбора данных и метод формирования дифференциальных поправок, при котором на станциях сбора информации осуществляется обработка с целью оперативного уточнения параметров моделей движения навигационных спутников, смещения их шкал времени и составления карт вертикальных ионосферных задержек. Все эти данные оперативно передаются на устройства потребителей, где они используются для уточнения навигационных параметров. Широкодиапазонные системы обеспечивают точность определения местоположения со среднеквадратической ошибкой около полметра в области, охватываемой сетью станций сбора информации и смежных с ней областях. Данные типы систем широко применяются в настоящее время. В частности, на территории Европейского Союза развернута система EGNOS, а в США - система WAAS.
Глобальные системы дифференциальной коррекции по своей структуре схожи с широкодиапазонными системами. Они также используют наземную сеть станций для сбора данных, тот же метод формирования и передачи сообщений с дифференциальными поправками. Основное отличие заключается в том, что исключение ионосферных ошибок в глобальной системе осуществляется путем использования двухчастотных измерений.
В настоящее время существует ряд патентов, описывающих близкие по решаемым задачам и способам технической реализации изобретения.
Например, в патенте RU 2386980 описан способ кинематического определения местоположения потребителей глобальных спутниковых навигационных систем в реальном времени со стационарным или подвижным опорным приемником. Коррекция погрешностей производится путем вычисления поправок к псевдодальностям на приемнике опорной станции и получения вектора относительного положения между приемником потребителя и приемником опорной станции.
В патенте RU 2592077 представлен способ измерения взаимного положения объектов по сигналам глобальных навигационных спутниковых систем, в которых осуществляется измерение псевдодальностей до спутников по фазе несущих колебаний. При этом, точное определение взаимного положения объектов производится по разностям псевдофазовых измерений, получаемых в разнесенных на местности навигационных приемниках.
В изобретении, описанном в патенте RU 2582595, для повышения точности и надежности определения местоположения подвижных объектов в режиме реального времени используется сгенерированная виртуальная базовая станция, расположенная на расстоянии 4 километра 300 метров от соответствующего подвижного объекта. Кроме этого, для минимизации погрешностей, возникающих при распространении сигнала, вводятся региональные модели ионосферы и тропосферы, вычисляемые в режиме реального времени. Как виртуальные базовые станции, так и модели ионосферы и тропосферы генерируются сетевым программным обеспечением на основе данных наземной инфраструктуры ГЛОНАСС.
Патент RU 2444705 описывает изобретение, в котором в качестве опорных станций в системе определения местоположения подвижных объектов в режиме реального времени выступают базовые станции сотовой связи. При этом, уточнение местоположения осуществляется путем триангуляции от не менее трех базовых станций.
Патент RU 2363012 описывает способ повышения точности позиционирования в реальном времени, в котором помимо стационарной опорной станции применяются псевдолиты, использующие фазу несущей и заменяющие реальные спутники навигационной системы.
Следует отметить, что подавляющее большинство описанных в данных патентах изобретений, направленных на повышение точности определения местоположения потребителей, предполагают использование различных дополнительных объектов наземной инфраструктуры для получения и передачи дифференциальных поправок. Использование подобного дорогостоящего оборудования существенно ограничивает область использования дифференциальных подсистем профессиональным применением. Многочисленные пользовательские устройства (смартфоны, планшетные компьютеры) в силу ряда причин, таких как ограничение по региону действия, необходимость значительного усложнения аппаратуры и существенная абонентская плата за доступ, не имеют возможности получения и применения дифференциальных поправок для коррекции координат.
Сущность изобретения
Данное изобретение призвано повысить точность определения местоположения потребителей глобальных спутниковых навигационных систем, находящихся в единой пространственно-временной области. При этом, ключевая особенность данного изобретения заключается в допущении, что в распоряжении потребителей находятся лишь бытовые навигационные устройства. Как правило, такие устройства содержат одночастотные приемники, принимающие сигналы стандартной точности и не имеющие функциональных возможностей для доступа к каким-либо дифференциальным подсистемам. К подобным бытовым устройствам относятся мобильные телефоны (смартфоны), планшетные компьютеры, автомобильные навигаторы, а также бортовые компьютеры, встроенные в автотранспортные средства.
Единая пространственно-временная область подразумевает, что все потребители в некотором интервале времени (условие соблюдения временной локальности) расположены недалеко друг относительно друга (условие соблюдения пространственной локальности), при этом погрешности определения навигационных параметров для этих потребителей достаточно сильно скоррелированы. Текущие размеры области определяются многими факторами, такими как движение спутников по орбитам и их взаимное расположение, а также текущее влияние ионосферы и тропосферы на распространение радиосигналов. При этом, потребители спутниковой навигационной системы, находящиеся в одной пространственно-временной области, для определения своего местоположения используют одно из рабочих созвездий, состоящих из видимых в данной области спутников, а влияние ионосферы и тропосферы на точность определения координат объектов примерно одинаковое.
Следует отметить, что не существует четко выраженных границ между пространственно-временными областями - потребитель одновременно может находиться в нескольких областях, отличающихся своими размерами как в пространственном масштабе, так и во временном.
Решение поставленной задачи достигается тем, что осуществляется сбор, централизованное хранение и анализ данных о местоположении большого количества подвижных объектов в рамках некоторой пространственно-временной области и вычисление общих поправок к наблюдаемым координатам данных объектов. К таким подвижным объектам логично, в первую очередь, отнести автотранспортные средства, в которых установлены навигационные программы, передающие свои координаты на серверы для обработки и анализа через коммуникационную сеть, в частности, сеть Интернет.
Предлагаемый в данном изобретении способ, равно как и способы в перечисленных выше изобретениях, основан на том факте, что в локальной области пространства потребители, определяющие свое местоположение по рабочему созвездию навигационной системы, будут иметь одинаковые погрешности, связанные с движением спутников и распространением радиосигналов. Другими словами, в каждый момент времени они будут иметь приблизительно одинаковые коррекционные поправки, обусловленные неточностью орбит спутников и условием распространение радиосигналов. Компенсация этих поправок позволит повысить точность определения местоположения потребителей, оставив лишь индивидуальные для каждого устройства погрешности, в частности, многолучевость при распространении радиосигналов и внутренние шумы приемника.
Для вычисления общих поправок предлагается использование цифровой разметки участков улично-дорожной сети, с помощью которой можно локализовать реальное положение подвижных объектов в некоторой пространственной области. Рассмотрим предлагаемую идею более подробно.
Пешеход с навигационным устройством может оказаться практически в любом месте некоторого участка земной поверхности. В отличие от пешехода, реальное расположение движущегося автотранспортного средства ограничено относительно небольшой областью пространства - проезжими частями, суммарная площадь которых в крупных городах не превышает 1-5% от общей территории. Двигающийся со скоростью более 20-30 километров в час автомобиль не может неожиданно оказаться вне проезжей части (на тротуаре, газоне или в открытом поле и т.д.) и продолжать там свое движение. На дороге с разделительным ограждением вероятность выезда на встречную полосу ничтожна мала. В свою очередь, область реального нахождения вагона трамвая или железнодорожного локомотива еще более ограничена в силу возможности движения только по рельсам.
При рассмотрении такой модели необходимо исходить из принципа законопослушности водителей - априори считаем, что подавляющее большинство автомобилистов передвигается с соблюдением правил дорожного движения и, прежде всего, не выезжает на встречные полосы, обочины и тротуары. Наблюдения от небольшого процента нарушителей, при этом, суммарно будут оказывать лишь незначительное влияние, сопоставимое со статистической погрешностью.
Современные города содержат достаточно большое количество различных элементов инфраструктуры улично-дорожной сети, информацию о наличии которых в цифровом виде можно использовать для вычисления вектора поправок при определении реального местоположения. К таким элементам, в частности, можно отнести:
- бордюры, отделяющие проезжую часть дороги от тротуаров или газонов;
- разделительные ограждения, отделяющие встречные полосы на многополосных дорогах;
- мосты, эстакады и путепроводы;
- трамвайные и железнодорожные пути.
Зафиксированные с использованием спутниковых навигационных систем координаты автотранспортных средств вне «разрешенных» областей, то есть противоречащие существующим элементам дорожной инфраструктуры, являются хорошим информационным сигналом при вычислении вектора дифференциальных поправок, корректирующих эти измерения в сторону реального расположения объектов.
Для дальнейшего описания изобретения введем понятие вероятностного поля дифференциальных поправок. Вероятностное поле дифференциальных поправок представляет собой абстрактную двухмерную или трехмерную область пространства, описывающую распределение плотности вероятности всех потенциально возможных корректировок относительно зафиксированного местоположения потребителя спутниковой навигационной системы. В центре поля поправок всегда находится наблюдаемое измерение, зафиксированное навигационным устройством потребителя. Размер области зависит от точности определения координат. Вектор дифференциальных поправок - это значения смещений координат относительно центра вероятностного поля поправок, применение которых приводит к коррекции наблюдаемого местоположения потребителя. Очевидно, что не все векторы дифференциальных поправок равновероятны. Вероятность того или иного вектора поправок определяется минимум двумя факторами:
- длиной вектора дифференциальных поправок (с учетом нормального распределения ошибок измерения можно считать, что чем ближе поправка к зафиксированному местоположению, тем ее вероятность выше);
- непротиворечивостью скорректированного значения потребителя, полученного путем применения поправки, цифровой разметке на данном участке улично-дорожной сети (в частности, если поправка корректирует положение движущегося автотранспортного средства таким образом, что новое положение оказывается за пределами проезжей части, очевидно, вероятность такой поправки близка к нулю).
Очевидно, что наиболее оптимальный вектор поправок должен приводить измерения координат максимально близко к реальному местоположению потребителя.
Для удобства нахождения оптимального вектора поправок вероятностное поле поправок разбивается на двухмерные или трехмерные непересекающиеся ячейки. Другими словами, в поле поправок генерируется регулярная или нерегулярная сетка. Размер ячеек сетки выбирается исходя из соблюдения двух компромиссных требований - точности вычисления оптимального вектора дифференциальной поправки и вычислительной сложности процедуры поиска. Использование большого количества ячеек в вероятностном поле поправок приводит к необходимости проведения пропорционального количества вычислений. С учетом необходимости обработки полей поправок для большого количества наблюдений, которое может достигать сотен тысяч и миллионов, это может потребовать существенных затрат времени и других вычислительных ресурсов.
Ячейки вероятностного поля поправок могут иметь различную форму, например, прямоугольные или шестиугольные. Считается, что поправки, попадающие в одну ячейку, не различимы между собой, в связи с чем в качестве вектора дифференциальной поправки, соответствующего той или иной ячейке, выбирается вектор, указывающий на ее центр. По сути, каждая ячейка сетки характеризуется своим значением плотности вероятности вектора дифференциальной поправки, а наибольшее значение плотности вероятности указывает на ячейку, соответствующую наиболее оптимальному вектору.
При рассмотрении агрегированного вероятностного поля поправок от множества потребителей удобнее оперировать нормированными весами ячеек. Вес ячейки прямо пропорционален значению плотности вероятности вектора поправок, а сумма весов всех ячеек вероятностного поля поправок равна единице.
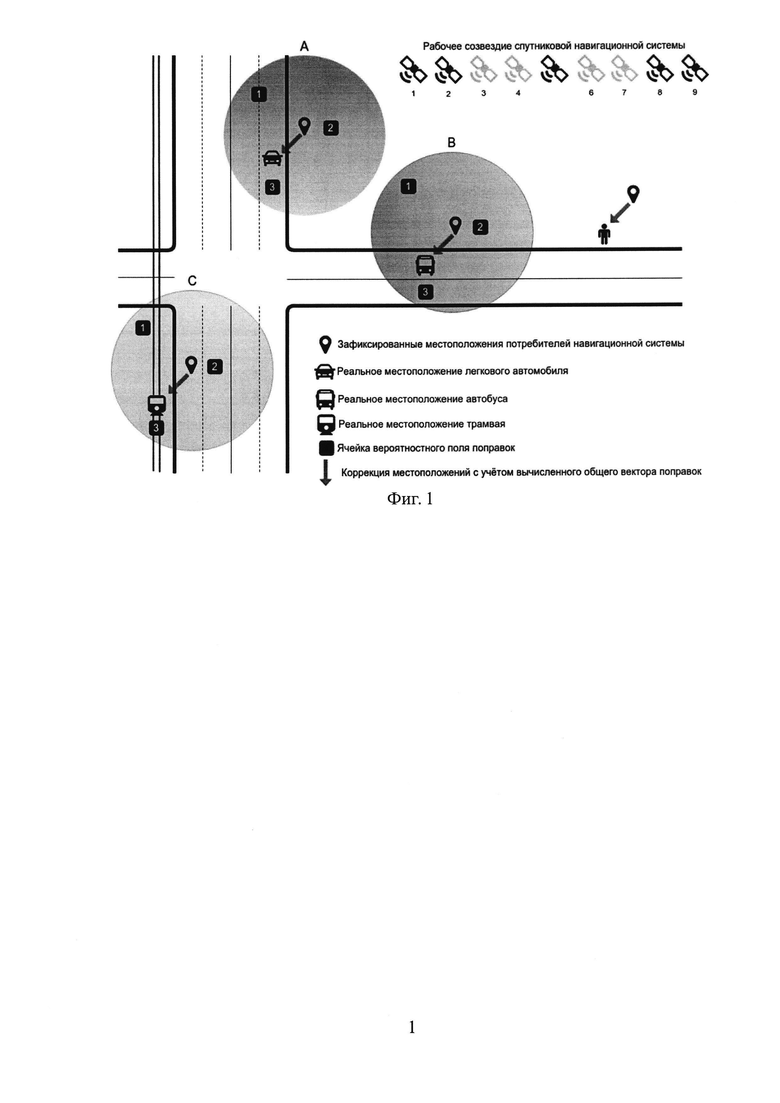
Продолжим рассмотрение сущности данного изобретения на простом примере. Предположим, что по двум пересекающимся улицам двигаются три автотранспортных средства - легковой автомобиль, автобус и трамвай (см. фиг. 1). Данные транспортные средства расположены на относительно близком друг от друга расстоянии, то есть находятся в единой пространственно-временной области, где погрешности вычисления псевдодальностей до навигационных спутников достаточно сильно скоррелированы. В момент времени tA навигационное устройство легкового автомобиля зафиксировало его местоположение, находящееся чуть в стороне от его реального расположения. Координаты автомобиля зафиксированы с некоторой погрешностью, которая описывается величиной среднеквадратического отклонения. Область вероятного расположения легкового автомобиля показана в виде окружности (закрашенная область А) некоторого радиуса, пропорционального ошибки позиционирования. Чем выше точность определения местоположения, то есть меньше среднеквадратическое отклонение, тем данная область меньше. Предположим, что радиус данной области составляют величину З⋅σ, где σ - среднеквадратическое отклонение текущего измерения координат, что соответствует приблизительно 98% вероятности попадания реального местоположения автомобиля в данную область.
В момент времени tB, достаточно близкое относительно tA (условие соблюдения временной локальности), навигационное устройство автобуса на соседней улице (условие соблюдения пространственной локальности) зафиксировало его местоположение, также находящееся чуть в стороне относительно реального расположения. Область вероятного расположения автобуса показана в виде другой окружности некоторого радиуса (закрашенная область В). Очевидно, в общем случае радиусы окружностей, соответствующих различным автотранспортным средствам будут отличаться. Однако, для упрощения описания области вероятного расположения автотранспортных средств показаны на рисунке одинаковыми.
Как было сказано выше, реальное расположение автотранспортных средств относительно полученных измерений определяется двумя факторами:
- удаленностью от центра поля поправок, то есть измеренного местоположения;
- наличием и конфигурацией элементов улично-дорожной сети в пространственной области, соответствующей текущему вероятностному полю поправок.
В дополнение к реальному расположению автотранспортных средств, рассмотрим три позиции в областях, в которых могут реально располагаться легковой автомобиль и автобус. Позиции №1, №2 и №3 соответствуют некоторым случайно выбранным ячейкам вероятностного поля поправок. Реальное количество таких ячеек существенно больше. При вычислении оптимального вектора поправок должны учитываться все ячейки, покрывающие целиком вероятностное поле поправок. Однако, для пояснения сути изобретения другие ячейки далее не рассматриваются.
В случае с легковым автомобилем наиболее близкая из рассматриваемых к центру поля поправок ячейка №2 имеет минимальную вероятность для выбора в качестве оптимального вектора поправки, так как расположена достаточно далеко от проезжей части (например, на обочине или тротуаре). Вероятность реального нахождения автомобиля в данной позиции минимальна. Наиболее вероятно, что автомобиль, тем более двигающийся с большой скоростью, будет расположен в позициях, соответствующих ячейкам №1 или №3. Данные позиции находятся приблизительно на одном расстоянии от зафиксированных координат, однако, позиция №3 чуть более вероятна, так как находится ближе к центру полосы, чем позиция, соответствующая ячейке №1, находящаяся между полос движения. Итак, очевидно, что не все позиции, задающие потенциальные векторы поправок, в рассматриваемой области равновероятны.
Теперь рассмотрим позиции, в которых может реально располагаться автобус, двигающийся по соседней улице. Позиции №1, №2 и №3 выбраны аналогичным позициям из области А, относящейся к легковому автомобилю. Из рисунка видно, что ячейка, соответствующая позиции №2, также не может указывать на реальную позицию автобуса, так как расположена вне проезжей части. Это усиливает уверенность в том, что данная позиция в вероятностном поле поправок не может выступать в качестве корректирующего значения для всех объектов из данной пространственно-временной области. Позиция №1 также расположена вне проезжей части, а позиция №3 - на встречной полосе. Все это свидетельствует в пользу того, что та позиция, где на рисунке обозначен автобус, является наиболее вероятным его реальным расположением.
Дальнейший анализ наблюдений, полученных от навигационного устройства трамвая (область С), дает существенно больше информации относительно выбора оптимального вектора дифференциальных поправок. Это обусловлено тем, что реальное расположение данных транспортных средств физически ограничено пределами рельс. Позиции №1 и №2 находятся вне реальной траектории движения трамвая, поэтому вероятности векторов поправок, соответствующие данным позициям, равны нулю.
Продолжая подобный анализ вероятностных полей поправок для всех доступных автотранспортных средств, находящихся в той же пространственно-временной области и использующих для определения местоположения общее рабочее созвездие навигационной системы, можно выделить наиболее вероятный вектор поправок к зафиксированным координатам объектов. Ячейка, соответствующая данному вектору дифференциальных поправок, будет иметь наибольший вес относительно других ячеек. По сути, найденный таким образом вектор поправок будет максимально правдоподобно описывать реально возможные положения рассматриваемых автотранспортных средств с учетом наблюдаемых, то есть зафиксированных навигационными системами, измерений их местоположений. Данную оптимизационную задачу можно с успехом решить, используя для этого алгоритмы машинного обучения. Найденный в результате вычислений вектор дифференциальных поправок необходимо применить ко всем зафиксированным координатам потребителей, чтобы уточнить их реальное местоположение. Следует заметить, что применение данной поправки не ограничивается автотранспортными средствами, с которых были получены данные для анализа. Коррекция местоположения может применяться для других объектов, например, для пешеходов, имеющих в своем распоряжении бытовые навигационные устройства. В этом случае, необходимо лишь соблюдение условия нахождения всех потребителей в единой пространственно-временной области и использование общего рабочего созвездия навигационной системы.
Очевидно, что чем большее количество наблюдений от автомобилей будет использоваться в анализе и построении агрегированного вероятностного поля поправок, тем точнее может быть найдена наиболее оптимальная поправка и определено реальное местоположение этих объектов, а также других потребителей спутниковых навигационных систем.
Полученная таким образом поправка компенсирует погрешности определения местоположения, общие для всех потребителей спутниковой навигационной системы, находящихся в одной пространственно-временной области, то есть связанные с расхождением шкал времени на спутниковых часах, неточностью эфемерид спутников и распространением радиосигнала в ионосфере и тропосфере. Другие погрешности, связанные с индивидуальными особенностями навигационных устройств, например, из-за многолучевого распространения радиосигнала или шумов приемной аппаратуры, остаются. Несмотря на это, авторы данного изобретения предполагают существенное увеличение точности определения местоположения потребителей спутниковых навигационных систем относительно «стандартных» измерений. Достижение субметровой (0.5-1 м) точности определения координат позволит решить ряд прикладных задач, в частности:
- Микронавигация автотранспортных средств - определение текущей полосы движения автомобиля и выработка рекомендаций по своевременному перестроению с целью оптимального следования по всему маршруту движения.
- Определение загруженности и средней скорости движения на отдельных полосах, что позволит навигационным программам и сервисам строить более оптимальные маршруты и точнее определять общее время движения и время прибытия в конечный пункт.
- Автоматическое обнаружение перекрытий отдельных полос на многополосных дорогах из-за проводимых ремонтных работ, неисправных транспортных средств или случившихся дорожно-транспортных происшествий.
- Мониторинг и оценка качества вождения (drive scoring), основанные на фиксации и анализе поведения водителя относительно движения по полосам - частота перестроений, выезд на встречную полосу, использование для движения обочин или выделенных для общественного транспорта полос, повороты или развороты с непредназначенных для этого полос.
- Постобработка траекторий движения автотранспортных средств, по которым они двигались непосредственно перед возникновением дорожно-транспортных происшествий с целью выяснения всех обстоятельств, анализа причин и выявления виновного.
Предлагаемый способ повышения точности местоположения может использоваться как путем непосредственной коррекции координат потребителя, так и через коррекцию псевдодальностей до спутников. При этом, коррекция координат может производиться в геодезических или геоцентрических системах. При вычислении в геодезических координатах, как правило, предполагается использование двухмерного вероятностного поля поправок, включающего измерения в горизонтальной плоскости, без коррекции высоты. Использование геоцентрических координат подразумевает применение трехмерного поля поправок. Способ с коррекцией координат может использоваться в том случае, когда определение координат потребителей осуществляется по одному рабочему созвездию навигационной системы. В тоже время, способ с коррекцией псевдодальностей снимает это ограничение. Рассмотрим предложенные способы более подробно.
Способ вычисления общей дифференциальной поправки для непосредственной коррекции координат потребителей спутниковой навигационной системы работает следующим образом:
1. Навигационный приемник с использованием стандартных аппаратно-программных средств вычисляет «примерные» геодезические координаты местоположения автотранспортного средства {L0, В0, Н0).
2. Определяется текущее рабочее созвездие, то есть номера и расположение на небосводе относительно подвижного объекта спутников навигационной системы, которые использовались для определения координат автотранспортного средства.
3. Вычисляется вероятностное поле поправок с учетом актуальной цифровой разметки текущего участка улично-дорожной сети, на котором находится автотранспортное средство.
4. Производится сбор, группировка по общим рабочим созвездиям и агрегация вероятностных полей поправок, полученных от множества автотранспортных средств из рассматриваемой пространственно-временной области.
5. Для каждого рабочего созвездия из соответствующего агрегированного вероятностного поля поправок извлекается и запоминается в памяти устройства наиболее вероятный вектор дифференциальной поправки {ΔL, ΔВ, ΔH}, соответствующий ячейке вероятностного поля поправок с наибольшим весом. В свою очередь, предлагаемый способ уточнения координат потребителя работает следующим образом:
1. Навигационный приемник с использованием стандартных аппаратно-программных средств вычисляет «примерные» геодезические координаты местоположения потребителя {L0, В0, Н0}.
2. Определяется текущее рабочее созвездие.
3. Из памяти устройства извлекается актуальный вектор дифференциальной поправки {ΔL, ΔВ, ΔH}, соответствующий текущему рабочему созвездию.
4. Вычисляются уточненные координаты {L, В, Н), для чего вектор дифференциальной поправки применяется к измеренным координатам по следующим формулам:
L=L0+ΔL
В=В0+ΔВ
H=H0+ΔH
Следует отметить, что вычисление наиболее вероятных поправок относится к низкочастотным процессам - не имеет смысла выполнять пересчет для каждого момента времени. Типовое значение периодичности вычисления вектора дифференциальных поправок составляет от нескольких до десятков минут. Для нахождения оптимального интервала времени пересчета для каждой пространственно-временной области могут использоваться алгоритмы машинного обучения с учетом множества факторов: реального географического положения области, расположения спутников на небосводе, сезонности и времени суток, текущих и прогнозируемых метеоусловий и т.д.
Модификацией рассмотренного выше способа повышения точности определения местоположения потребителей является вычисление поправок к псевдодальностям до спутников.
Данный способ работает следующим образом. На стадии вычисления поправок к псевдодальностям производится:
1. Навигационный приемник с использованием стандартных аппаратно-программных средств вычисляет «примерные» геодезические координаты местоположения автотранспортного средства {L0, В0, Н0}.
2. Геодезические координаты объекта {L0, В0, Н0} пересчитываются в геоцентрические координаты {х0, у0, z0} по следующим формулам:
x0=(N+Н0)cosB0cosL0
y0=(N+H0)cosB0sinL0
z0=[{1-e2)N+H0]sinB0
где  ,
,
 - эксцентриситет эллипсоида,
- эксцентриситет эллипсоида,
α=1-b/а - параметр сжатия эллипсоида.
3. Навигационный приемник предоставляет данные о расстоянии от объекта до спутников рабочего созвездия {D1, D2 …, DM}.
4. Осуществляется сбор наблюдений от множества транспортных средств, находящихся в одной пространственно-временной области.
5. Используя совокупность известных псевдодальностей от всех видимых в данной пространственно-временной области спутников до некоторой группы транспортных средств, производится вычисление общих поправок к данным значениям {ΔD1, ΔD2 …, ΔDM}. Данные поправки вычисляются путем решения оптимизационной задачи, минимизирующей некоторый заданный функционал ошибки с учетом ограничений, накладываемых цифровой разметкой на участках улично-дорожной сети, по которым двигаются транспортные средства. Другими словами, в данном способе делается попытка найти поправки к псевдодальностям, которые наиболее точно описывали бы различие между наблюдаемым и наиболее возможным местоположением совокупности автотранспортных средств.
6. В памяти каждого устройства производится запоминание актуального вектора дифференциальных поправок {ΔD1, ΔD2, …, ΔDM] к псевдодальностям для каждого видимого спутника, не обязательно входящего в текущее рабочее созвездие. Стадия применения поправок для уточнения текущего местоположения потребителя производится следующим образом:
1. Навигационный приемник предоставляет данные о псевдодальности до спутников рабочего созвездия {D01, D02, …, D0N}.
2. Из памяти устройства извлекается актуальный вектор дифференциальных поправок {ΔD1, ΔD2, …, ΔDN} к псевдодальностям до спутников рабочего созвездия.
3. Вычисляются уточненные значения псевдодальностей для спутников рабочего созвездия по формуле Di=D0i+ΔDi, i∈1…N
4. По уточненным псевдодальностям {D1, D2, …, DN} одним из известных способов решается навигационная задача, то есть вычисляются геоцентрические координаты потребителя {х, у, z}.
5. Геоцентрические координаты потребителя {х, у, z} переводятся в геодезические {L, В, Н} по дифференциальным формулам согласно используемой системы геодезических параметров. Это достигается использованием одного из множества способов решения данной задачи, например, с использованием итеративного метода Боуринга.
В отличие от рассмотренного выше, главным достоинством способа, связанного с вычислением поправок к псевдодальностям, является возможность обработки данных от всей совокупности потребителей, без необходимости разбиения этой совокупности по рабочим созвездиям и отдельного вычисления поправок для каждой из таких групп. Как следствие, в среднем повышается точность определения местоположения из-за использования большего количества измерений. Кроме этого, в первом способе разбиение на группы по рабочим созвездиям может производиться неравномерно - будут существовать группы как с большим количеством, так и небольшим количеством измерений. Подобные группы с малым количеством потребителей, скорее всего, не дадут должного эффекта при коррекции их местоположений.
Недостатком способа является необходимость проведения дополнительных вычислений. Кроме этого, следует заметить, что в настоящее время применение второго способа затруднено на бытовых устройствах (смартфонах, планшетных компьютерах и т.п.) в силу невозможности получения и какого-либо использования измеренных псевдодальностей. Компания Google, которая является разработчиком наиболее популярной мобильной операционной системы Android, обещает открыть доступ через программный интерфейс к дополнительной информации, относящейся к определению местоположения с использованием спутниковой навигационной системы, в том числе к величине задержки распространения радиосигналов. С появлением в операционной системе Android N данной функциональной возможности откроются перспективы использования данного способа в пользовательских мобильных устройствах.
Резюмируя вышесказанное, можно отметить, что предложенный в данном изобретении способ уточнения местоположения потребителей спутниковых навигационных систем является альтернативой созданию и использованию отдельной дифференциальной подсистемы. При этом, не требуется устанавливать дополнительное дорогостоящее оборудование ККС, а в качестве пользовательских устройств могут использоваться широко распространенные бытовые навигационные устройства, имеющие одночастотные приемники без аппаратной или программной поддержки стандартных протоколов коррекции.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием конкретных вариантов его осуществления со ссылками на сопровождающие рисунки, на которых:
- Фиг. 1 поясняет общий принцип предлагаемого в данном изобретении способа, описывает вероятностные поля поправок для отдельных автотранспортных средств, находящихся в единой пространственно-временной области и использующих общее рабочее созвездие спутниковой навигационной системы.
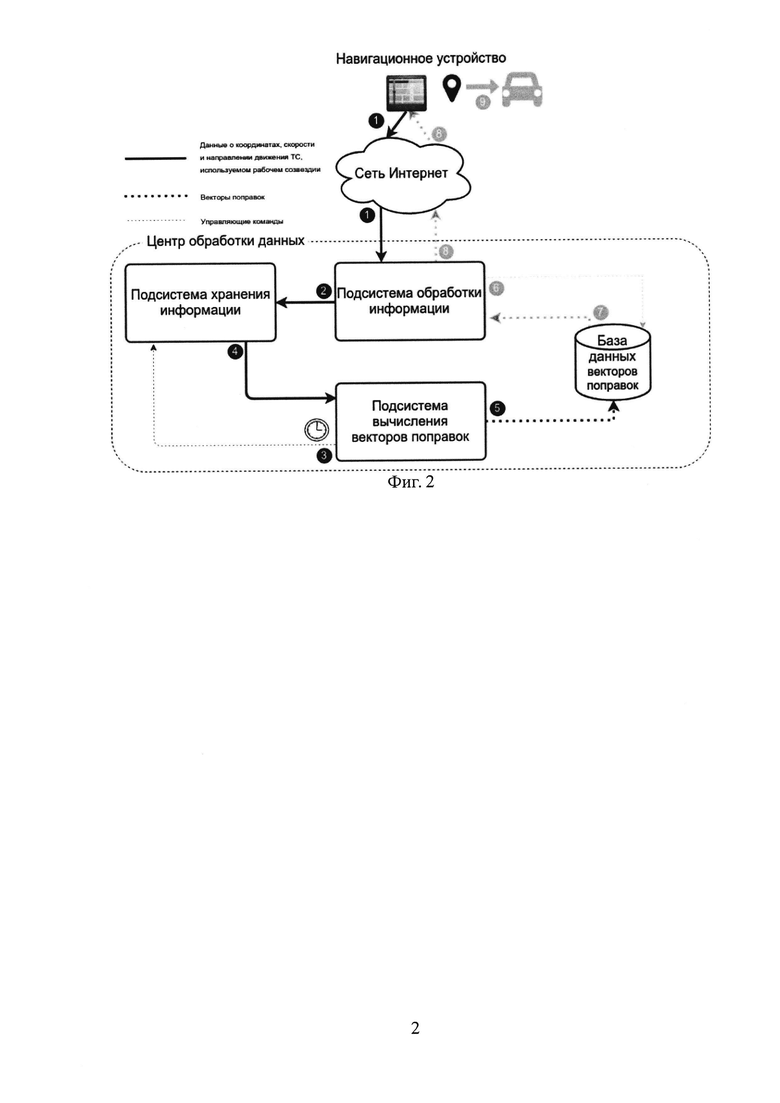
- Фиг. 2 описывает состав и схему взаимодействия компонентов системы на стадии вычисления дифференциальных поправок.
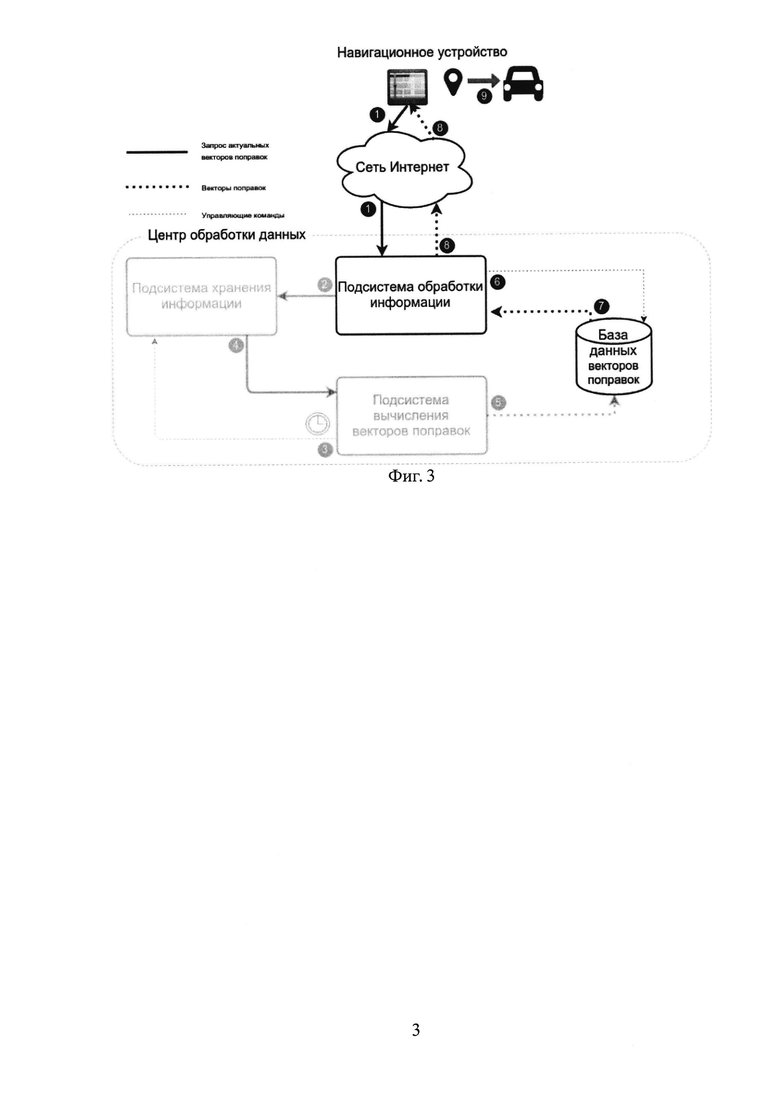
- Фиг. 3 описывает состав и схему взаимодействия компонентов системы на стадии запроса и применения дифференциальных поправок бытовыми навигационными устройствами.
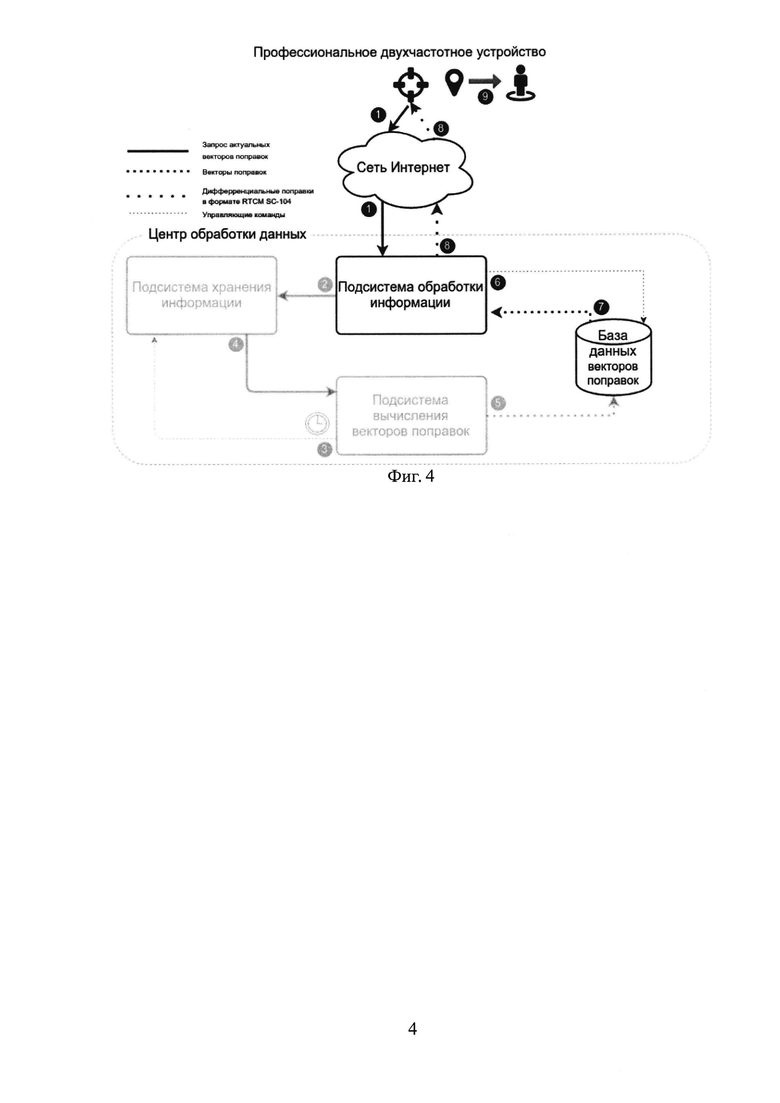
- Фиг. 4 описывает состав и схему взаимодействия компонентов системы на стадии запроса и применения дифференциальных поправок профессиональными устройствами с использованием сообщений в формате RTCM SC-104.
Подробное описание предпочтительных вариантов осуществления изобретения
В данном разделе приведено подробное описание нескольких из возможных вариантов реализации изобретения.
Во время движения по дороге навигационное оборудование, установленное в автотранспортном средстве, получает радиосигналы от спутников навигационной системы, по которым вычисляет оценку координат текущего положения автотранспортного средства, его мгновенную скорость и направление движения. Вся совокупность данных, относящихся к одному моменту времени и характеризующая движение автомобиля в этом момент времени, далее будем называть наблюдением. В состав наблюдения также включается информация об используемом в данный момент времени рабочем созвездии навигационной системы, а также могут входить другие навигационные параметры, в частности, измеренные псевдодальности до спутников.
Полученные таким образом данные наблюдений с использованием глобальной коммуникационной сети (в частности, сети Интернет) передаются в центр обработки данных на один из серверов подсистемы обработки информации (стадия 1 на фиг. 2). Для повышения пропускной способности системы в целом, обеспечения ее отказоустойчивой работы и снижения времени задержки на передачу и обработку информации могут использоваться несколько центров обработки данных, территориально удаленных друг от друга.
Кроме подсистемы обработки информации в состав центра обработки данных также входят: подсистема хранения информации, подсистема вычисления векторов поправок, а также база данных векторов поправок. Следует заметить, что данный состав подсистем является весьма условным. Возможно применение различных сочетаний перечисленных подсистем внутри одного центра обработки данных. Например, один центр обработки данных может целиком отвечать за хранение «сырых» данных и вычисление дифференциальных поправок, а другой - за хранение готовых к использованию векторов дифференциальных поправок. Кроме этого, возможно наличие дополнительных подсистем, выполняющих вспомогательные задачи, например, формирование сообщений, содержащих дифференциальные поправки, в соответствии с требуемым форматом.
Далее приведено более подробное описание основных принципов взаимодействия этих подсистем, как если бы они располагались в одном центре обработки данных.
Пакет данных может включать в себя одно или одновременно несколько наблюдений, относящихся соответственно к одному или нескольким моментам времени. В подсистеме хранения информации производится накопление данных, полученных от множества потребителей (стадия 2). Помимо навигационных данных, данная подсистема хранит цифровую разметку участков улично-дорожной сети, которая на периодической основе обновляется. Актуальность цифровой разметки оказывает непосредственное влияние на точность вычисления векторов дифференциальных поправок.
Подсистема вычисления векторов поправок с некоторой периодичностью запрашивает «сырые» данные у подсистемы хранения данных (стадия 3). Периодичность запроса данных может находиться в диапазоне от нескольких до десятков минут. Данные от подсистемы хранения информации передаются в подсистему вычисления (стадия 4).
Подсистема вычисления производит разбиение данных по пространственно-временным областям и отдельную обработку каждой из таких областей. В одном из вариантов реализации изобретения каждая такая область разбивается на группы, соответствующие одному рабочему созвездию навигационной системы. Для каждой такой группы формируется агрегированное вероятностное поле дифференциальных поправок и выделяется наиболее вероятный вектор поправок, соответствующий ячейке с наибольшим весом. Данный вектор дифференциальных поправок сохраняется в базу данных (стадия 5), откуда на периодической основе передается на устройства потребителей, находящихся в данной пространственно-временной области.
В другом варианте реализации группировка по рабочим созвездиям не производится, так как выполнятся вычисление вектора дифференциальных поправок к псевдодальностям для каждого видимого в данной пространственно-временной области спутника. Вычисленные векторы поправок к псевдодальностям также сохраняются в базе данных (стадия 5).
Кроме передачи наблюдений, навигационное устройство периодически запрашивает актуальные векторы поправок (стадия 1 на фиг. 3). Запрос от подсистемы обработки информации перенаправляется в базу данных векторов поправок (стадия 6), откуда извлекаются актуальные векторы дифференциальных поправок (стадия 7) и через коммуникационную сеть передаются в навигационное устройство (стадия 8). Полученные дифференциальные поправки сохраняются в памяти устройства до следующего запроса и применяется к зафиксированным координатам, уточняя, таким образом, местоположение потребителя (стадия 9).
В качестве клиентов системы могут выступать профессиональные устройства, поддерживающие получение дифференциальных поправок в формате RTCM SC-104 через коммуникационную сеть с использованием протокола NTRIP или другого, предназначенного для обмена подобной информацией. Как правило, это дорогие двухчастотные устройства, используемые при проведении геодезических или кадастровых работ.
В этом случае навигационное устройство запрашивает поправки по протоколу NTRIP (стадия 1 на фиг. 4). Запрос от подсистемы обработки информации перенаправляется в базу данных векторов поправок (стадия 6), откуда извлекается актуальный вектор дифференциальных поправок (стадия 7). Подсистема обработки информации формирует сообщения в формате RTCM SC-104 и через коммуникационную сеть передает их в навигационное устройство (стадия 8). Полученные из сообщения поправки штатными аппаратно-программными средствами самого устройства применяется к оценке координат потребителя (стадия 9), так, как если бы они получались бы от «реальных» подсистем дифференциальных поправок.
Альтернативный вариант реализации изобретения предполагает, что мобильное пользовательское устройство не имеет доступа к центру обработки данных через коммуникационную сеть. В этом случае роль подсистемы обработки и хранения данных, а также подсистемы вычисления и базы данных векторов дифференциальных поправок выполняют компоненты, входящие в состав навигационного устройства, расположенного в автотранспортном средстве. Поэтому, вместо вычисления общего вектора поправок для множества автотранспортных средств, находящихся в одной пространственно-временной области, производится вычисление индивидуального вектора поправок для самого навигационного устройства. Недостатком данной реализации системы является ограничение применимости автомобильными навигационными программами, а также проблема «холодного старта», которая заключается в необходимости затрат некоторого времени после начала движения автомобиля для получения достаточно точных значений векторов дифференциальных поправок. Кроме этого, требуется значительное усложнение программного обеспечения навигационного устройства.
В данном изобретении описаны способы для определения местоположения потребителей спутниковых навигационных систем и использующие их системы. Способы основаны на том факте, что в локальной области пространства потребители, определяющие свое местоположение по рабочему созвездию навигационной системы, будут иметь одинаковые погрешности, связанные с движением спутников и распространением радиосигналов. Другими словами, в каждый момент времени они будут иметь приблизительно одинаковые коррекционные поправки, обусловленные неточностью орбит спутников и условием распространения радиосигналов. Компенсация этих поправок позволит повысить точность определения местоположения потребителей, оставив лишь индивидуальные для каждого устройства погрешности, в частности, многолучевость при распространении радиосигналов и внутренние шумы приемника. Обеспечивается повышение точности определения координат одночастотных навигационных приемников, встроенных в пользовательские мобильные устройства и не имеющих технических возможностей для получения и применения коррекционных поправок от различных существующих дифференциальных подсистем. 8 н. и 5 з.п. ф-лы, 4 ил.
1. Способ определения местоположения объектов с использованием приемников глобальных спутниковых навигационных систем, заключающийся в получении геодезических координат объектов штатными аппаратно-программными средствами навигационных приемников, а также информации о рабочих созвездиях, используемых для вычисления данных координат, выделении условной пространственно-временной области корреляции погрешностей вычисления псевдодальностей до спутников навигационной системы, централизованном сборе с использованием коммуникационных сетей, хранении координат и рабочих созвездий, полученных с автотранспортных средств, находящихся в данной пространственно-временной области, группировке наблюдений по рабочим созвездиям, вычислении общей коррекционной поправки для каждой такой группы путем выбора оптимального вектора дифференциальных поправок из числа потенциально возможных векторов дифференциальных поправок, определяемых с использованием общего вероятностного поля дифференциальных поправок, полученного агрегацией индивидуальных вероятностных полей дифференциальных поправок с учетом физических ограничений на возможное расположение автотранспортных средств, накладываемых существующими элементами дорожной инфраструктуры, описанными в виде цифровой разметки участков улично-дорожной сети, по которым двигаются наблюдаемые автотранспортные средства, передаче оптимального вектора дифференциальных поправок на навигационные устройства и применении его ко всем объектам, находящимся в той же пространственно-временной области и использующим соответствующее вектору дифференциальных поправок рабочее созвездие, путем суммирования наблюдаемых геодезических координат и вектора дифференциальных поправок.
2. Способ определения местоположения объектов с использованием приемников глобальных спутниковых навигационных систем, заключающийся в получении геодезических координат объектов штатными аппаратно-программными средствами навигационных приемников, а также информации о рабочих созвездиях, используемых для вычисления данных координат, переводе координат объектов из геодезической системы в геоцентрическую, выделении условной пространственно-временной области корреляции погрешностей вычисления псевдодальностей до спутников навигационной системы, централизованном сборе с использованием коммуникационных сетей, хранении геоцентрических координат и рабочих созвездий, полученных с автотранспортных средств, находящихся в данной пространственно-временной области, группировке наблюдений по рабочим созвездиям, вычислении общей коррекционной поправки для каждой такой группы путем выбора оптимального вектора дифференциальных поправок из числа потенциально возможных векторов дифференциальных поправок, определяемых с использованием общего вероятностного поля дифференциальных поправок, полученного агрегацией индивидуальных вероятностных полей дифференциальных поправок с учетом физических ограничений на возможное расположение автотранспортных средств, накладываемых существующими элементами дорожной инфраструктуры, описанными в виде цифровой разметки участков улично-дорожной сети, по которым двигаются наблюдаемые автотранспортные средства, передаче оптимального вектора дифференциальных поправок на навигационные устройства, применении его ко всем объектам, находящимся в той же пространственно-временной области и использующим соответствующее вектору дифференциальных поправок рабочее созвездие, путем суммирования геоцентрических координат и вектора дифференциальных поправок, переводе геоцентрических координат объектов обратно в геодезическую систему.
3. Способ по п. 1, отличающийся тем, что потребитель получает векторы дифференциальных поправок, соответствующие нескольким пересекающимся пространственно-временным областям, в которых он расположен, вычисляет скорректированные координаты, соответствующие полученным векторам дифференциальных поправок, и усредняет полученные координаты местоположения с учетом весов соответствующих пространственно-временных областей.
4. Способ по п. 2, отличающийся тем, что потребитель получает векторы дифференциальных поправок, соответствующие нескольким пересекающимся пространственно-временным областям, в которых он расположен, вычисляет скорректированные координаты, соответствующие полученным векторам дифференциальных поправок, и усредняет полученные координаты местоположения с учетом весов соответствующих пространственно-временных областей.
5. Способ определения местоположения автотранспортного средства с использованием приемника глобальных спутниковых навигационных систем, заключающийся в получении геодезических координат объекта штатными аппаратно-программными средствами навигационного приемника, а также информации о рабочих созвездиях, используемых для вычисления данных координат, хранении координат и рабочих созвездий в памяти навигационного устройства без передачи собранных данных с использованием коммуникационной сети, группировке наблюдений по рабочим созвездиям, вычислении общей коррекционной поправки для каждой такой группы путем выбора оптимального вектора дифференциальных поправок из числа потенциально возможных векторов дифференциальных поправок, определяемых с использованием общего вероятностного поля дифференциальных поправок, полученного агрегацией вероятностных полей дифференциальных поправок с учетом физических ограничений на возможное расположение автотранспортного средства с установленным навигационным устройством, накладываемых существующими элементами дорожной инфраструктуры, описанными в виде цифровой разметки участков улично-дорожной сети, по которым двигается автотранспортное средство, и применении вычисленного вектора дифференциальных поправок путем его суммирования с наблюдаемыми геодезическими координатами.
6. Способ определения местоположения автотранспортного средства с использованием приемника глобальных спутниковых навигационных систем, заключающийся в получении геодезических координат объекта штатными аппаратно-программными средствами навигационного приемника, а также информации о рабочих созвездиях, используемых для вычисления данных координат, переводе координат объекта из геодезической системы в геоцентрическую, хранении координат и рабочих созвездий в памяти навигационного устройства без передачи собранных данных с использованием коммуникационной сети, группировке наблюдений по рабочим созвездиям, вычислении общей коррекционной поправки для каждой такой группы путем выбора оптимального вектора дифференциальных поправок из числа потенциально возможных векторов дифференциальных поправок, определяемых с использованием общего вероятностного поля дифференциальных поправок, полученного агрегацией вероятностных полей дифференциальных поправок с учетом физических ограничений на возможное расположение автотранспортного средства с установленным навигационным устройством, накладываемых существующими элементами дорожной инфраструктуры, описанными в виде цифровой разметки участков улично-дорожной сети, по которым двигается автотранспортное средство, применении вычисленного вектора дифференциальных поправок путем его суммирования с наблюдаемыми геоцентрическими координатами и переводе геоцентрических координат объекта обратно в геодезическую систему.
7. Способ определения местоположения объектов с использованием приемника глобальных спутниковых навигационных систем, заключающийся в получении геодезических координат объектов штатными аппаратно-программными средствами навигационных приемников, а также информации о рабочих созвездиях, используемых для вычисления данных координат, переводе координат объектов в геоцентрическую систему, выделении условной пространственно-временной области корреляции погрешностей вычисления псевдодальностей до спутников навигационной системы, централизованном сборе с использованием коммуникационных сетей, хранении геоцентрических координат и информации о рабочих созвездиях, полученных с автотранспортных средств, находящихся в данной пространственно-временной области, вычислении коррекционных поправок к псевдодальностям до всех навигационных спутников, используемых для определения координат объектов из данной пространственно-временной области путем решения оптимизационной задачи, минимизирующей некоторый заданный функционал ошибки с учетом физических ограничений на возможное расположение автотранспортных средств, накладываемых существующими элементами дорожной инфраструктуры, описанными в виде цифровой разметки участков улично-дорожной сети, по которым двигаются наблюдаемые автотранспортные средства, и которые наиболее точно описывали бы различия между наблюдаемыми и реально возможными местоположениями совокупности автотранспортных средств, передаче вектора дифференциальных поправок к псевдодальностям на навигационные устройства и применении его к псевдодальностям до спутников рабочего созвездия путем суммирования наблюдаемых псевдодальностей и вектора дифференциальных поправок, вычислении скорректированных геоцентрических координат и переводе их в геодезическую систему.
8. Способ по п. 7, отличающийся тем, что потребитель получает векторы дифференциальных поправок, соответствующие нескольким пересекающимся пространственно-временным областям, в которых он расположен, вычисляет скорректированные псевдодальности, соответствующие полученным векторам дифференциальных поправок, и усредняет полученные псевдодальности с учетом весов соответствующих пространственно-временных областей.
9. Способ определения местоположения автотранспортного средства с использованием приемника глобальных спутниковых навигационных систем, заключающийся в получении геодезических координат объекта штатными аппаратно-программными средствами навигационного приемника, а также информации о рабочих созвездиях, используемых для вычисления данных координат, переводе координат объекта в геоцентрическую систему, хранении координат и рабочих созвездий в памяти навигационного устройства без передачи собранных данных с использованием коммуникационной сети, вычислении коррекционных поправок к псевдодальностям до всех навигационных спутников, используемых для определения координат объекта путем решения оптимизационной задачи, минимизирующей некоторый заданный функционал ошибки с учетом физических ограничений на возможное расположение автотранспортного средства с установленным навигационным устройством, накладываемых существующими элементами дорожной инфраструктуры, описанными в виде цифровой разметки участков улично-дорожной сети, по которым двигается автотранспортное средство, и которые наиболее точно описывали бы различия между наблюдаемыми и реально возможными местоположениями автотранспортного средства, применении полученного вектора дифференциальных поправок к псевдодальностям до спутников рабочего созвездия путем суммирования наблюдаемых псевдодальностей и вектора дифференциальных поправок, вычислении скорректированных геоцентрических координат и переводе их в геодезическую систему.
10. Система для определения местоположения потребителей глобальных спутниковых навигационных систем, включающая в себя навигационные устройства, расположенные в автотранспортных средствах и вне их, подсистему обработки и хранения данных, а также вычисления и базу данных векторов дифференциальных поправок, входящие в состав центра обработки данных, доступный навигационному устройству с использованием глобальной коммуникационной сети, и которая осуществляет сбор и передачу в центр обработки данных наблюдений о координатах и рабочем созвездии спутниковой навигационной системы, накопление наблюдений, полученных от множества различных автотранспортных средств, находящихся в одной пространственно-временной области корреляции погрешностей вычисления псевдодальностей до спутников навигационной системы, вычисление и хранение общих векторов дифференциальных поправок и передачу полученных дифференциальных поправок с использованием коммуникационной сети обратно на навигационное устройство, где производится коррекция наблюдаемого местоположения с учетом полученного вектора дифференциальных поправок.
11. Система по п. 10, отличающаяся тем, что в качестве потребителя дифференциальной поправки выступает устройство, поддерживающее получение дифференциальных поправок в виде сообщений в формате RTCM SC-104.
12. Система по п. 11, отличающаяся тем, что дифференциальные поправки передаются потребителю в виде сообщений в других форматах.
13. Система для определения местоположения автотранспортного средства, включающая в себя навигационное устройство, расположенное в автотранспортном средстве, подсистемы обработки и хранения данных, а также вычисления и базу данных векторов дифференциальных поправок, входящие в состав навигационного устройства, и которые осуществляют сбор и накопление наблюдений о координатах навигационного устройства и рабочем созвездии спутниковой навигационной системы, вычисление и хранение индивидуальных для навигационного устройства векторов дифференциальных поправок, а также коррекцию наблюдаемого местоположения с учетом вычисленных индивидуальных векторов дифференциальных поправок.
| СИСТЕМА ТОЧНОЙ НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ ДАННЫХ НАЗЕМНОЙ ИНФРАСТРУКТУРЫ ГЛОНАСС | 2015 |
|
RU2582595C1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Токарный резец | 1924 |
|
SU2016A1 |

