Область техники и предшествующий уровень техники
Изобретение относится к погрузочно-разгрузочному устройству для корпусов, содержащих объекты; например, это могут быть корпуса, содержащие контейнеры, заполненные материалом, предназначенным для производства ядерного топлива.
Некоторые материалы, используемые для изготовления ядерного топлива, такого как МОКС-топливо, транспортируют в герметично закрытых контейнерах, помещенных внутрь корпусов, которые, в свою очередь, также герметично закрыты.
Например, в случае производства МОКС-топлива оксид плутония восстанавливают после переработки отработавшего топлива и хранят в герметично закрытых металлических контейнерах, при этом вышеуказанные контейнеры укладывают в корпус, также выполненный из металла и герметично закрытый. Эти корпуса транспортируют от установок для переработки отработавшего ядерного топлива к установкам для производства МОКС-топлива.
Когда этот корпус поступает на установку для производства МОКС-топлива, его открывают, а контейнеры с оксидом плутония разгружают для использования оксида плутония.
Открывание корпуса и погрузку-разгрузку контейнеров с оксидом плутония выполняют в перчаточной камере посредством робототехнических устройств, которыми можно управлять снаружи перчаточной камеры. Соответственно, устройство или устройства для погрузки-разгрузки корпусов и контейнеров должны иметь прочную конструкцию и обеспечивать снижение количества аварий и исключать сложное и, в общем, длительное техническое обслуживание в перчаточной камере. Кроме того, с контейнерами следует обращаться с осторожностью во избежание их повреждения, которое может привести к утечке содержащегося в них материала и препятствовать их погрузке-разгрузке из установки, например, применительно для их открывания и/или хранения.
Раскрытие изобретения
Следовательно, задачей изобретения является создание погрузочно-разгрузочного устройства для корпуса, содержащего объекты, для открывания корпуса и последовательного извлечения контейнеров, содержащихся в этом корпусе, при этом вышеуказанное устройство должно быть простым в изготовлении, прочным и обеспечивающим надежную погрузку-разгрузку корпусов и контейнеров.
Вышеуказанная задача решается посредством погрузочно-разгрузочного устройства, содержащего кожух для размещения корпуса, закрытый на одном конце и открытый на другом конце, удерживающие средства для корпуса, снабженные двумя захватами, предназначенными для зажимания корпуса, и двумя захватами, образующими стопор для контейнеров, содержащихся в корпусе, когда корпус открыт.Эти захваты свободно установлены на зажимных захватах корпуса и совместно отводятся назад упругими средствами так, чтобы при открывании зажимных захватов стопорные захваты также открывались, и так, чтобы стопорные захваты могли открываться независимо от зажимных захватов.
Наиболее предпочтительно, чтобы эти стопорные захваты взаимодействовали с устройством для извлечения контейнеров, когда они извлекаются из корпуса, при этом вышеуказанное устройство для извлечения содержит пальцы, предназначенные для взаимодействия со стопорными захватами для перемещения их в сторону друг от друга и обеспечения прохода для контейнеров, при этом корпус удерживается в зажатом состоянии зажимными захватами. Контейнеры извлекаются из корпуса и принимаются устройством для извлечения.
Наиболее предпочтительно, чтобы удаление контейнеров выполнялось под действием собственного веса.
Предпочтительно, кожух расположен в колесе, установленном с возможностью вращения вокруг своей оси, и проходит вдоль диаметра вышеуказанного колеса, вращение колеса позволяет корпусу занимать различные положения, в которых он подвергается различным операциям.
Объектом изобретения является погрузочно-разгрузочное устройство для корпусов, имеющих цилиндрическую форму, и содержащихся в них контейнеров, включающее в себя кожух с продольной осью, выполненный с возможностью размещения корпуса, закрытый на первом продольном конце и открытый на втором продольном конце, удерживающее устройство, установленное в области второго конца кожуха и содержащее два зажимных захвата, выполненных с возможностью перемещения вокруг оси, перпендикулярной продольной оси кожуха, и прикладывания зажимного усилия к корпусу для удерживания корпуса в кожухе в продольном направлении, по меньшей мере одно исполнительное устройство для открывания и закрывания вышеуказанных зажимных захватов, два стопорных захвата, каждый из которых поддерживается зажимным захватом и выполнен с возможностью свободного поворота вокруг оси вращения зажимного захвата, причем вышеуказанные стопорные захваты выполнены с возможностью сведения друг к другу в стопорное положение посредством упругих средств, так что открывание зажимных захватов вызывает открывание стопорных захватов, и стопорные захваты способны открываться независимо от зажимных захватов.
Устройство может содержать колесо, установленное с возможностью вращения вокруг своей оси,, при этом вышеуказанный кожух расположен в вышеуказанном колесе и проходит вдоль диаметра вышеуказанного колеса.
Один из зажимных захватов может содержать заплечик, образующий продольный стопор для корпуса. Другой зажимной захват может содержать поверхность, наклоненную относительно оси кожуха по направлению к наружной стороне кожуха.
Предпочтительно, по меньшей мере один из стопорных захватов содержит свободно вращающийся ролик, примыкающий к проходу, который ограничен двумя стопорными захватами для обеспечения легкого выхода объекта, содержащегося в корпусе.
В соответствии с вариантом осуществления каждый стопорный захват содержит открывающие поверхности с обеих сторон прохода, ограничиваемого двумя стопорными захватами, при этом вышеуказанные открывающие поверхности стопорного захвата расположены напротив открывающих поверхностей другого стопорного захвата, и вышеуказанные открывающие поверхности выполнены с возможностью взаимодействия с уклонами, поддерживаемыми устройством для открывания.
Предпочтительно, каждая из открывающих поверхностей содержат свободно вращающийся ролик, взаимодействующий с одним из вышеуказанных уклонов.
Предпочтительно, погрузочно-разгрузочное устройство содержит по меньшей мере один датчик для измерения положения стопорных захватов.
Наиболее предпочтительно, чтобы устройство содержало одинарный датчик, измеряющий относительное положение стопорных захватов, при этом вышеуказанный датчик поддерживается плечом, жестко связанным во время движения с одним из захватов, и восприимчив к перемещению другого плеча, жестко связанного во время движения с другим стопорным захватом.
Устройство может содержать исполнительное устройство для поворотного перемещения одного из зажимных захватов и средства для передачи движения другому зажимному захвату, вынуждая зажимные захваты перемещаться друг от друга или сближаться.
Например, зажимные захваты содержат два боковых фланца, которые шарнирно соединены с рамой погрузочно-разгрузочного устройства, и в которых средства для передачи образованы зубьями, поддерживаемыми каждым боковым фланцем, при этом вышеуказанные боковые фланцы содержат зубья, входящие в зацепление таким образом, что вращение в одном направлении одного из зажимных захватов вызывает вращение другого зажимного захвата в противоположном направлении.
Упругие средства, отводящие назад стопорные захваты, содержат две винтовые пружины, расположенные с обеих сторон продольной оси кожуха, при этом каждая винтовая пружина прикреплена одним концом к одному стопорному захвату, а другим концом - к другому стопорному захвату. Предпочтительно, чтобы устройство содержало средства регулирования натяжения пружин.
Погрузочно-разгрузочное устройство может содержать устройство для перемещения корпуса вдоль продольной оси кожуха, расположенное в кожухе.
Другим объектом настоящего изобретения является установка для погрузки-разгрузки корпуса и содержащихся в нем контейнеров, содержащая погрузочно-разгрузочное устройство в соответствии с изобретением, устройство для открывания корпусов для отделения передней части корпуса от корпуса и обеспечения доступа к объектам, содержащимся в корпусе, и устройство для удаления и извлечения объектов, содержащихся в корпусах.
Например, устройство для открывания корпусов и устройство для удаления и извлечения объектов, содержащихся в корпусах, расположены вокруг колеса.
В варианте выполнения устройство для открывания корпусов является режущим устройством, расположенным над колесом, а устройство для удаления и извлечения расположено под колесом, так что удаление объектов из корпуса достигается посредством собственного веса.
Во время удаления объектов продольная ось кожуха ориентирована под углом 45° относительно горизонтального направления.
Устройство для удаления и извлечения может содержать плечо с продольной осью, перемещаемое по меньшей мере при вращении вокруг оси, параллельной оси колеса, каретку, установленную с возможностью перемещения по плечу вдоль продольной оси плеча, гнездо, поддерживаемое кареткой и предназначенное для размещения объекта, содержащегося в корпусе, и средства открывания стопорных захватов.
Средства открывания стопорных захватов содержат четыре пальца, которые поддерживаются кареткой и примыкают к кожуху, при этом вышеуказанные пальцы ориентированы параллельно продольной оси плеча, и каждый из них имеет свободный конец с уклоном, предназначенным для взаимодействия со стопорными захватами таким образом, что в случае, когда пальцы вставлены между стопорными захватами, эти захваты удаляются друг от друга.
Предпочтительно, чтобы каретка содержала средство обнаружения присутствия объекта.
Установка может содержать устройство для извлечения опорожненного корпуса, расположенное под колесом таким образом, чтобы извлечение опорожненного корпуса обеспечивалось посредством собственного веса, и устройство для извлечения передних частей корпусов.
Преимущественно, объекты являются контейнерами, содержащими оксид плутония, а установка помещена в перчаточную камеру.
Краткое описание чертежей
Изобретение станет более понятным из дальнейшего описания со ссылками на чертежи.
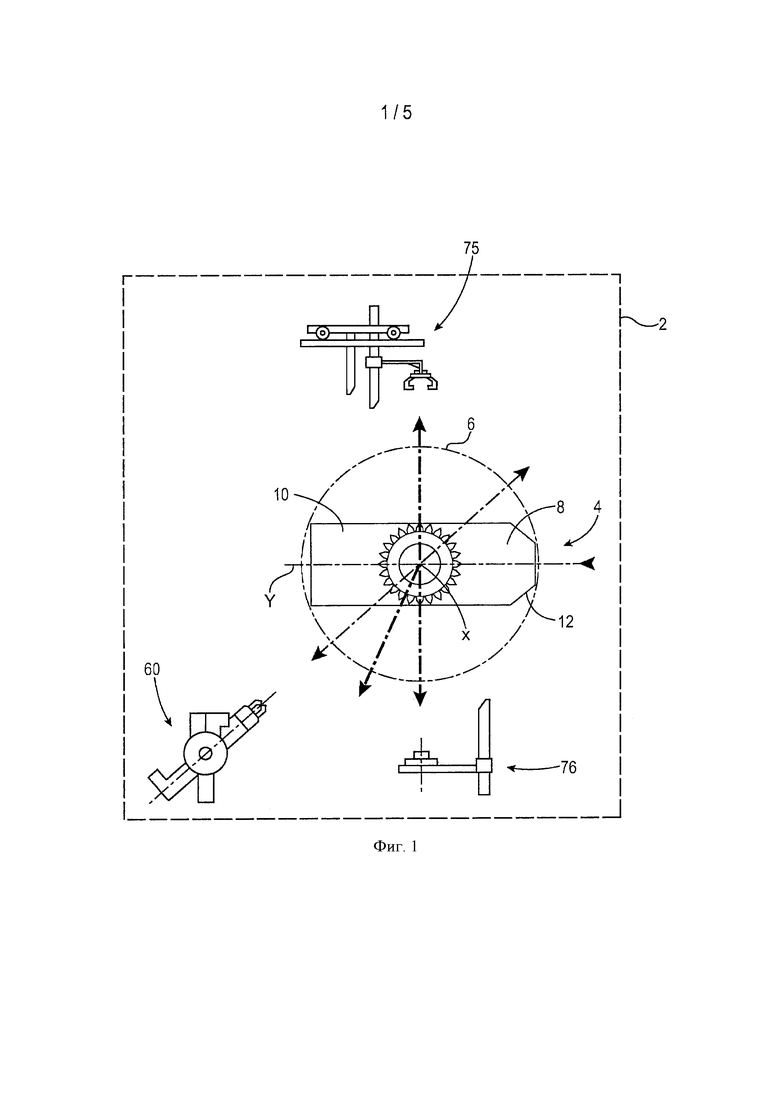
На фиг. 1 схематично представлена комплектная погрузочно-разгрузочная установка для корпуса и контейнеров, содержащихся в этом корпусе;
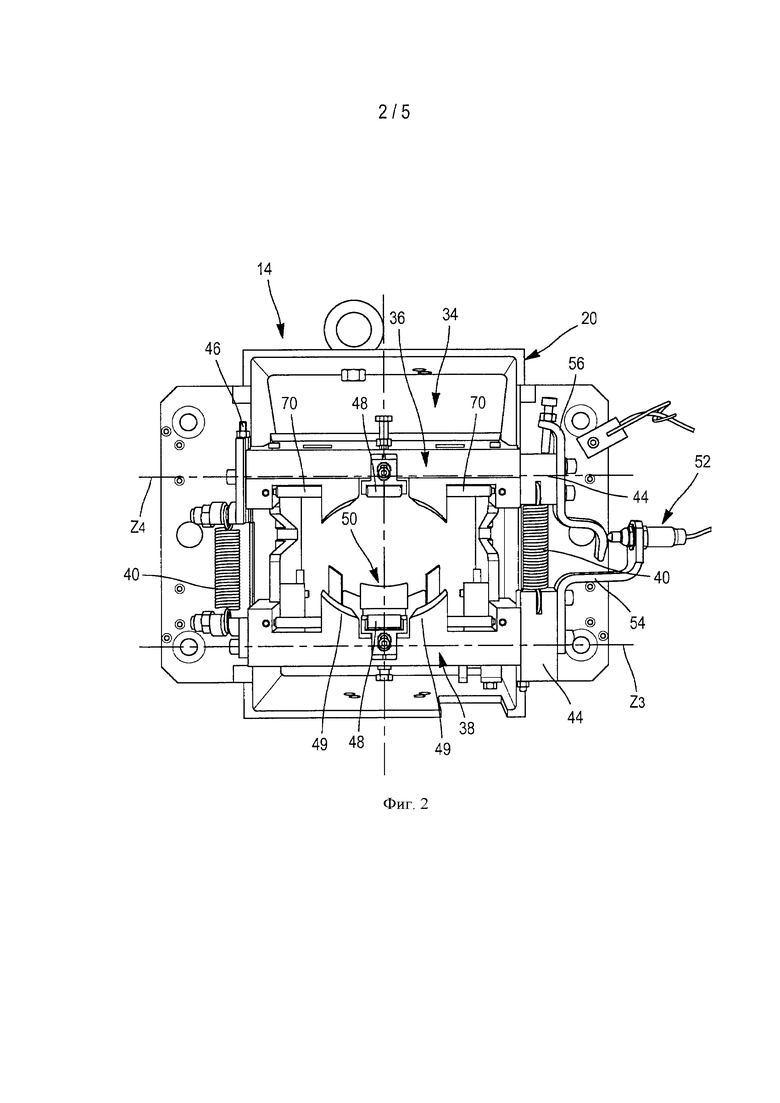
на фиг. 2 показано устройство для удерживания корпуса, также образующее стопор для содержащихся в корпусе контейнеров, причем устройство внедрено в установку на фиг. 1, а корпус и контейнеры не показаны, вид спереди;
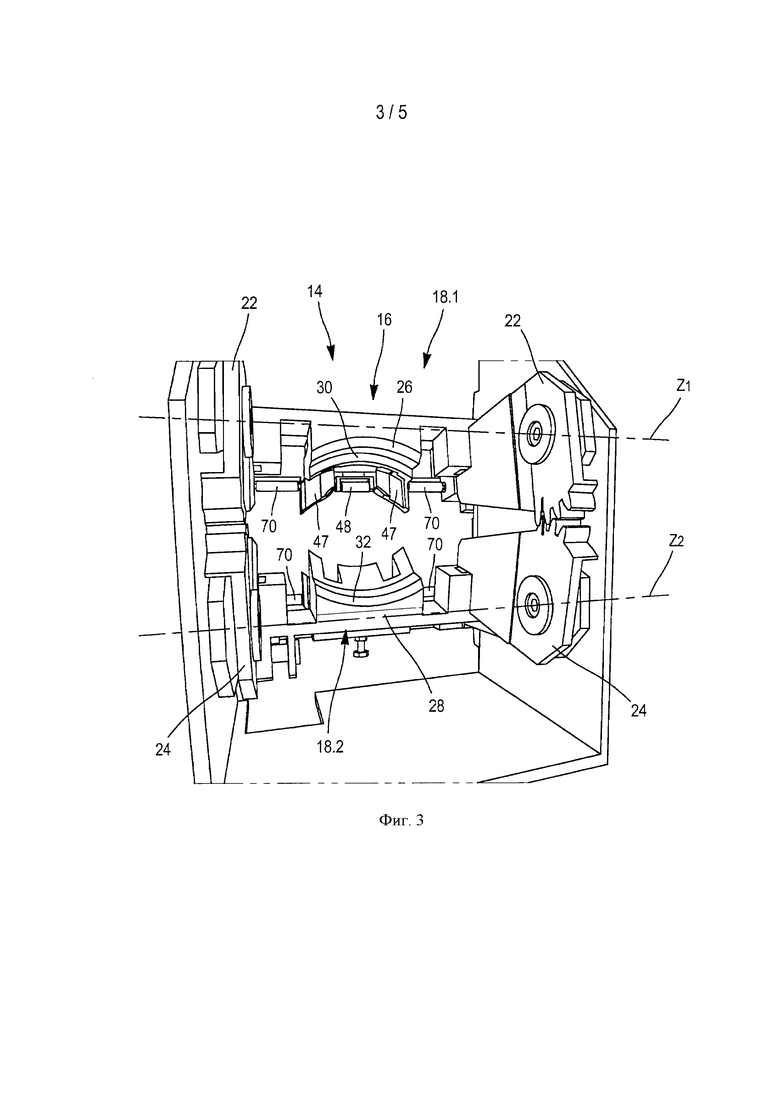
на фиг. 3 - устройство на фиг. 2, вид сзади;
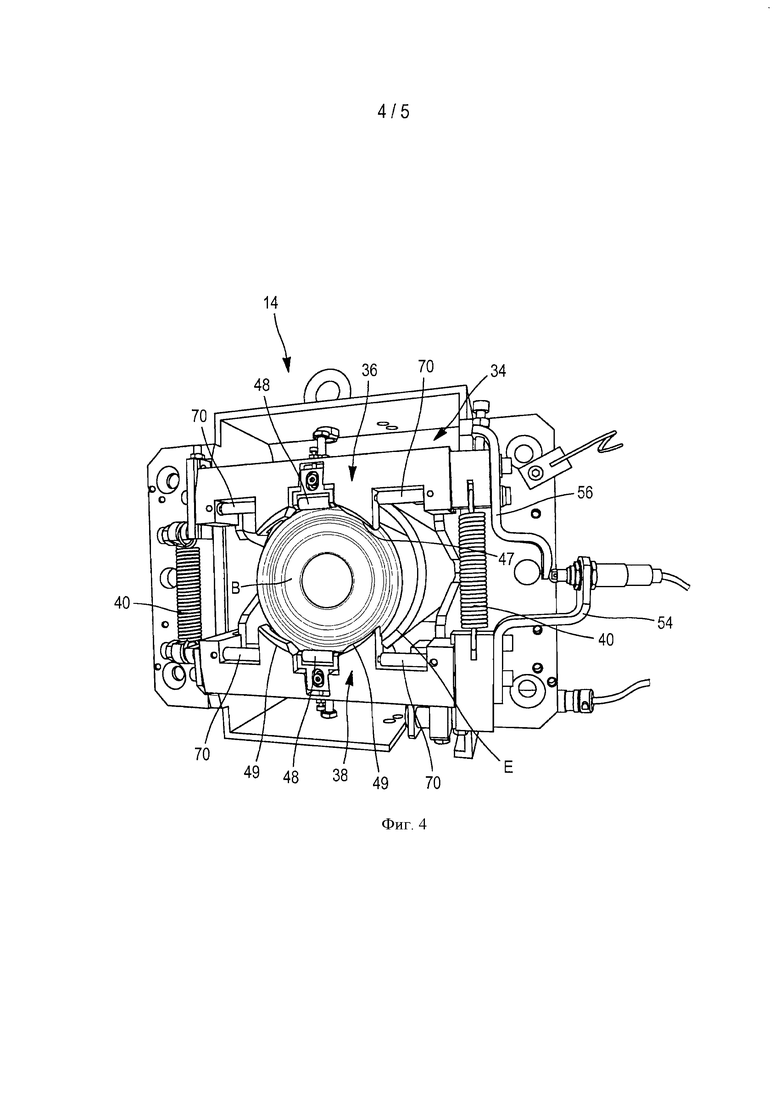
на фиг. 4 - установленные на место корпус и контейнер, вид спереди, аналогичный виду на фиг. 2,
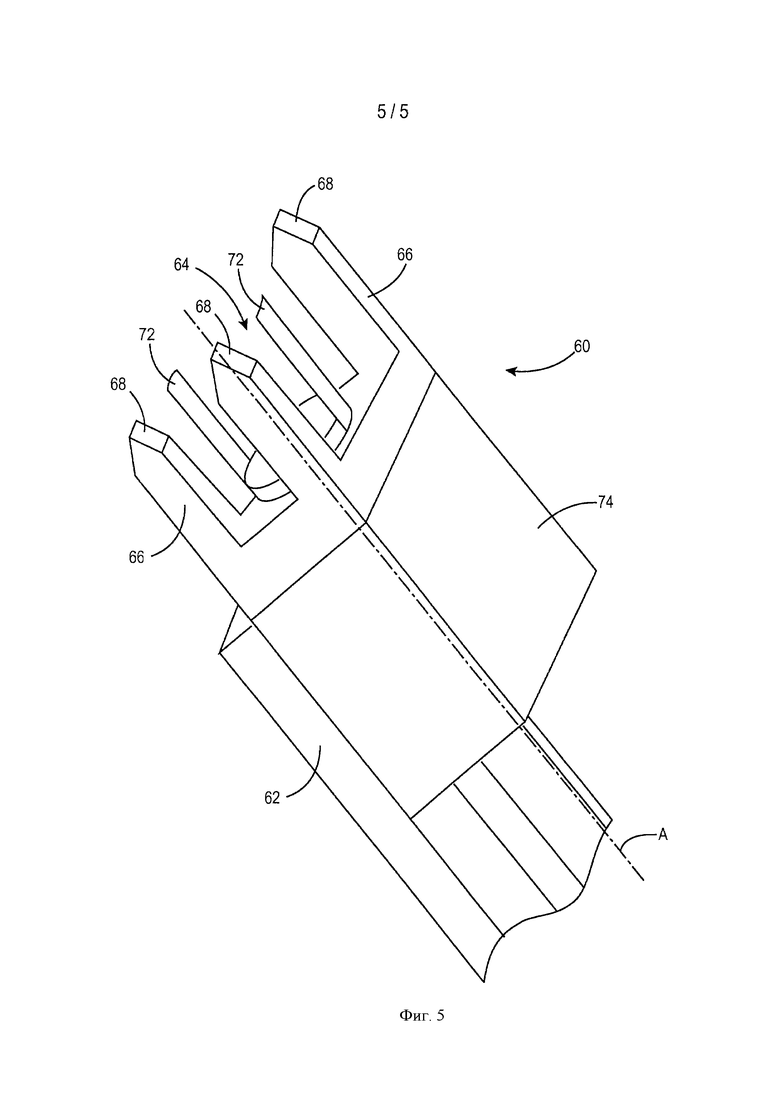
на фиг. 5 схематично показано устройство для извлечения контейнеров, содержащихся в корпусе.
Варианты осуществления изобретения
Далее приведено описание погрузочно-разгрузочного устройства для контейнеров и установки, содержащей такое устройство, в отношении корпуса, содержащего контейнеры, заполненные оксидом плутония. Однако должно быть понятно, что это устройство является вариантом осуществления, и что погрузочно-разгрузочное устройство может быть использовано для других объектов помимо контейнеров, содержащих оксид плутония, независимо от того, относятся ли они к области применения ядерной энергии или другой области.
На фиг. 1 схематично показана установка для погрузки-разгрузки и управления корпусами, содержащими контейнеры, заполненные оксидом плутония. В показанном примере корпус имеет трубчатую форму.
Корпуса Е, содержащие контейнеры В с оксидом плутония, транспортируют от перерабатывающих установок к установкам для производства ядерного топлива в емкостях. После доставки на установки для производства ядерного топлива каждый корпус по отдельности извлекают из емкости и вводят в первую перчаточную камеру с последующим вводом во вторую перчаточную камеру, содержащую установку, показанную на фиг. 1. Вышеуказанная вторая перчаточная камера показана пунктиром в виде рамки и указана ссылочным обозначением 2.
Корпуса размещают по отдельности в перчаточной камере 2 для горизонтальной загрузки в погрузочно-разгрузочное устройство 4, корпуса плотно закрывают, когда они загружены в погрузочно-разгрузочное устройство 4.
В показанном и предпочтительном примере погрузочно-разгрузочное устройство содержит колесо 6, свободно вращающееся вокруг оси X, которая расположена горизонтально и перпендикулярно плоскости листа, как показано на фиг. 1.
Колесо 6 приспособлено вращаться вокруг оси X так, что может занимать различные положения в зависимости от выполнения различных операций в этих положениях. Вращение колеса обеспечивается, например, посредством электродвигателя (не показан).
Колесо 6 содержит кожух 8 с осью Y, которая проходит по диаметру колеса. Кожух 8 содержит первый продольный закрытый конец 10 и второй продольный открытый конец 12, через который вводят корпуса. Когда корпус находится в кожухе 8, его продольная ось проходит параллельно оси Y кожуха.
Второй конец 12 снабжен устройством для удерживания корпуса и удерживания контейнеров, когда корпус открыт.Это устройство далее называется как «удерживающее устройство» и показано ссылочным обозначением 14. Как вариант, кожух 8 может поддерживаться плечом, которое применяется при вращении и перемещении кожуха.
Удерживающее устройство показано на фиг. 2, 3 и 4.
Далее приведено подробное описание удерживающего устройства 14.
На фиг. 2 и 3 показано удерживающее устройство отдельно от расположенного снаружи колеса 6, вид спереди и вид сзади, соответственно.
Удерживающее устройство содержит средства 16 для зажимания корпуса. Средства 16 для зажимания содержат верхний захват 18.1 и нижний захват 18.2 (фиг. 3). Верхний 18.1 и нижний 18.2 захваты шарнирно установлены на раме 20.
В показанном примере верхний захват 18.1 содержит два фланца 22, проходящих параллельно оси Y кожуха 8. Каждый фланец шарнирно установлен на раме 20 относительно оси Z1. Нижний захват 18.2, в свою очередь, содержит, два фланца 24, проходящих параллельно оси Y и шарнирно установленных на раме 20 относительно оси Z2, параллельной оси Z1.
Каждый захват 18.1, 18.2 содержит зажимы 26, 28, соответственно проходящие между двумя фланцами 22, 24, соответственно, и предназначенные для зажимания корпуса. В закрытом положении захватов 18.1, 18.2 два зажима 26, 28 ограничивают кожух, соответствуя наружной части корпуса.
Удерживающее устройство 14 также содержит исполнительные средства захватов 18.1, 18.2, вызывающие их закрывание или размещение на определенном расстоянии посредством поворачивания вокруг осей Z1, Z2, соответственно. В показанном и наиболее предпочтительном примере фланцы 22 и 24 верхнего и нижнего захватов содержат зубья, входящие в зацепление друг с другом таким образом, что поворот одного из захватов в одном направлении вызывает поворот другого из захватов в противоположном направлении, обеспечивая синхронизацию закрывания или открывания захватов 18.1, 18.2. В показанном примере фланцы верхнего захвата 18.1 содержат четыре зуба, входящих в зацепление с тремя зубьями фланцев нижнего захвата 18.2.
Этот вариант осуществления имеет дополнительное преимущество, заключающееся в упрощении устройства, поскольку в этом случае оно содержит один исполнительный механизм для одновременного движения двух захватов 18.1, 18.2. Например, перемещение одного из захватов выполняется посредством одного электродвигателя с использованием соединительной штанги, шарнирно соединенной с одним из фланцев (не показано). В соответствии с альтернативным вариантом может быть использован двигатель для каждого из захватов для приведения в действие каждого из зажимных захватов 18.1, 18.2, при этом действие двух двигателей синхронизируется.
Наиболее предпочтительно, чтобы зажим 26 верхнего захвата 18.1 содержал заплечик 30, образующий продольный стопор для корпуса. Зажим нижнего захвата 18.2 по существу, преимущественно, содержит скос 32 для направления контейнеров, выходящих из корпуса. Этот вариант осуществления, использующий продольный стопор на одном из захватов и направляющую на другом захвате, обеспечивает очень высокую надежность при удалении контейнеров и исключает риск заклинивания из-за несоблюдения геометрии или заданных размеров захватов.
Удерживающее устройство 14 также содержит средства, образующие продольный стопор для контейнеров, содержащихся в корпусе. Эти средства, указанные ссылочным обозначением 34, содержат верхний захват 36 и нижний захват 38, и эти захваты будут именоваться как стопорные захваты. Стопорные захваты 36, 38 поддерживаются верхним 18.1 и нижним 18.2 захватами так, что они расположены после захватов 18.1, 18.2 в направлении удаления контейнеров, содержащихся в корпусе, вдоль оси Y. Стопорные захваты 36, 38 шарнирно установлены на раме 20 относительно осей Z1 и Z2, соответственно, как и верхний 18.1 и нижний 18.2 захваты.
Стопорные захваты 36, 38 свободно установлены на верхнем 18.1 и нижнем 18.2 захватах так, что стопорные захваты 36, 38 могут удаляться друг от друга посредством поворачивания вокруг осей Z1 и Z2 независимо от захватов 18.1 и 18.2.
Стопорные захваты 36, 38 совместно ограничивают проход, по существу, круглой формы 47 диаметром немного меньше наружного диаметра контейнеров, как показано на фиг. 4. В состоянии обеспечения прохождения контейнеров проход имеет диаметр немного больше наружного диаметра контейнеров.
Стопорные захваты 36, 38 сводятся друг к другу посредством упругих средств 40, расположенных сбоку с обеих сторон прохода для контейнеров между захватами. В показанном примере эти упругие средства 40 образованы винтовыми пружинами, соединяющими стопорные захваты 36, 38.
Наиболее предпочтительно, чтобы были выполнены регулировочные средства для регулирования растяжения пружин. Для этого регулировочные средства установлены на каждом стопорном захвате посредством элемента 44, шарнирно соединенного со стопорными захватами относительно осей Z3 и Z4 параллельно осям Z1 и Z2, и для изменения натяжения пружин имеется регулировочный винт 46.
Стопорный захват 36 содержит два зажима 47, образующих дугу окружности, и стопорный захват 38 также содержит два зажима 49, образующих дугу окружности. Наиболее предпочтительно, чтобы каждый из захватов 36, 38 содержал между двумя зажимами ролик 48 для направления и прокатывания контейнеров во время их извлечения. Каждый ролик 48 установлен с возможностью свободного вращается вокруг оси параллельно осям Z1 и Z2.
Также наиболее предпочтительно, чтобы стопорные захваты 36, 38 могли быть удалены друг от друга посредством внешнего устройства, которое будет описано далее, при этом вышеуказанное внешнее устройство также предназначено для одновременного повторного закрывания контейнеров, удаляемых из корпуса.
В показанном и предпочтительном примере удерживающее устройство 14 содержит средства обнаружения положения стопорных захватов 36 и 38 относительно друг друга. Предпочтительно, чтобы эти средства обнаружения содержали одинарный датчик 52, измеряющий относительное положение двух стопорных захватов 36 и 38. В показанном примере датчик 52 установлен на плече 54, жестко связанном во время движения со стопорным захватом 38, и взаимодействует с плечом 56, жестко связанным во время движения со стопорным захватом 36. Этот датчик 52 преимущественно является только механическим, уменьшающим риск выхода из строя по сравнению с электронным датчиком, в особенности в перчаточной камере установки для производства ядерного топлива.
Как вариант, датчик может быть расположен на нижнем стопорном захвате 38 и на верхнем стопорном захвате 36, и измерения могут быть сравнены для определения относительного положения стопорных захватов 36 и 38.
Обнаружение положений зажимных захватов 18.1 и 18.2 корпуса может быть выполнено непосредственно рядом с электродвигателем, который перемещает по меньшей мере один из двух захватов 18.1, 18.2. Датчики, поддерживаемые зажимными захватами, могут быть выполнены, как вариант.
Далее приведено описание устройства для открывания стопорных захватов и извлечения контейнеров, схематично показанное на фиг. 5.
Как описано далее, контейнеры преимущественно удаляются под действием собственного веса. Устройство 60 для извлечения содержит плечо 62, вращающееся вокруг горизонтальной оси посредством первого конца и содержащее на втором конце приемное гнездо 64 для контейнеров, удаляемых из корпуса. Этот конец также содержит средства открывания стопорных захватов 36, 38, образованные четырьмя пальцами 66. Эти четыре пальца предназначены для взаимодействия с поверхностями противолежащих захватов 36, 38 и для обеспечения их удаления друг от друга на определенное расстояние от оси Y для расширения прохода, ограничиваемого зажимами стопорных захватов 36, 38.
Для этого пальцы содержат свободные концы 68, имеющие наклонную поверхность, так называемые уклоны 68, такие, чтобы их продольное проникновение вдоль оси Y между стопорными захватами 36,38 вынуждало стопорные захваты удаляться друг от друга по достижении усилия, прикладываемого пружинами 40. Наиболее предпочтительно, чтобы каждый захват 36, 38 содержал два ролика 70 с каждой стороны зажимов 47, 49, предназначенных для взаимодействия с наклонными концами пальцев 66, так, чтобы эти концы 68 катились по роликам 70. Этот вариант осуществления имеет преимущество, состоящее в том, что исключается заклинивание и уменьшается износ пальцев и стопорных захватов 36, 38.
Устройство для извлечения также содержит захват 72, который повторно закрывается, когда обнаруживается, что контейнер находится в гнезде.
Преимущественно, датчик расположен в гнезде для определения присутствия или отсутствия контейнера. Преимущественно, гнездо поддерживается подвижной кареткой 74 вдоль оси А плеча, которая позволяет контейнеру, содержащемуся в гнезде, перемещаться и перемещать его по направлению к каретке для хранения (не показана), например, для этапа взвешивания контейнера и/или для последующего этапа открывания и опорожнения с целью производства ядерного МОКС-топлива.
Например, вышеуказанный захват управляется посредством подъемника, и каретка перемещается с помощью двигателя винтового типа.
Далее приведено описание различных устройств установки для погрузки-разгрузки и управления корпусом, содержащим контейнеры, со ссылкой на фиг. 1.
Установка, содержащаяся в перчаточной камере 2, включает в себя различные устройства, распределенные по колесу 6. Она содержит устройство 75 для открывания корпуса, содержащее режущие средства для конца корпуса, при этом вышеуказанное режущее устройство, например, является, устройством, которое раскрыто в документе FR 2182902. Оно содержит установленный с возможностью вращения отрезной диск, который может выполнять резку по окружности трубы.
Колесо 6, предпочтительно, содержит систему продольного перемещения вдоль оси Y корпуса, которую используют для резки корпуса, размещая корпус так, чтобы его конец, подлежащий резке, выступал от колеса 6 и мог быть отрезан отрезным диском. Преимущественно, режущее устройство размещают вертикально над колесом под углом 90° относительно положения подачи корпуса на колесо 6. Установка также содержит устройство 60 для извлечения контейнеров. Преимущественно, это устройство размещают ниже колеса так, что кожух ориентирован под углом 45° относительно горизонтальной оси, что обеспечивает извлечение контейнеров, содержащихся в корпусе, под действием собственного веса.
Установка также может содержать устройство 76 для извлечения корпуса после его полного опорожнения от контейнеров. В показанном примере это устройство расположено ниже колеса 6 так, что ось Y кожуха 8 ориентирована вертикально.
Далее приведено описание различных этапов погрузки-разгрузки и опорожнения корпуса от его подачи в перчаточную камеру 2 до извлечения в устройство 76 для извлечения.
Как описано выше, корпус Е вводят в перчаточную камеру 2 в горизонтальном положении, колесо 6 ориентируют так, что ось Y кожуха 8 также горизонтальна.
Закрытый корпус Е вставляют в кожух 8, например, посредством толкателя (не показан). Для этого захваты 18.1 и 18.2 предварительно удаляют друг от друга для образования прохода, достаточного для прохождения корпуса. Благодаря конструкции удерживающего устройства 14 стопорные захваты 36 и 38 также удаляются друг от друга, оставляя свободный проход для корпуса Е. Когда корпус Е помещен в кожух 8, захваты 18.1,18.2 снова закрывают, удерживая корпус Е зажатым.
Затем колесо 6 поворачивают на угол 90° в направлении против часовой стрелки так, чтобы удерживающее устройство 14 расположилось в верхней части колеса 6 напротив режущего устройства. Закрытый конец корпуса Е, расположенный сбоку от удерживающего устройства 14, подвергают резке. Для этого зажимные захваты 18.1, 18.2 удаляются друг от друга, также вызывая открывание стопорных захватов 36, 38. Устройство перемещения вдоль оси Y обеспечивает перемещение корпуса, который будет двигаться вверх, вынуждая выступать конец корпуса, подлежащий резке. Режущее устройство приводится в действие после обнаружения соответствующего положения корпуса Е. Режущим диском выполняют резку корпуса Е по трубчатой периферии для отделения передней части корпуса от корпуса, в котором содержатся контейнеры. Переднюю часть корпуса, отрезанную от корпуса, извлекают, например, посредством захвата и затем удаляют.
По завершении резки устройством перемещения вдоль оси Y опускают корпус в кожух 8, а зажимные захваты 18.1 и 18.2 снова закрывают, обеспечивая повторное зажимание корпуса, и заплечик, образованный в верхнем захвате 18.1, образует стопор для открытого конца корпуса. Стопорные захваты 36 и 38 образуют продольный стопор вдоль оси Y для контейнеров В, которые теперь доступны через открытый конец корпуса (фиг. 4).
Во время следующего этапа для извлечения контейнеров, содержащихся в корпусе, колесо поворачивают вокруг оси в направлении устройства для извлечения контейнеров. В показанном примере колесо поворачивают на угол 135° в направлении против часовой стрелки так, чтобы ось Y кожуха была ориентирована по оси, расположенной под углом 45° относительно горизонтали. Плечо устройства для извлечения ориентируют так, чтобы его ось А, по существу, выравнивалась с осью Y кожуха 8. Далее каретку, снабженную пальцами 66, перемещают вдоль оси А в направлении удерживающего устройства 14; пальцы проникают между двумя стопорными захватами 36 и 38, и наклонные концы или уклоны 68 пальцев скользят по роликам, вынуждая стопорные захваты 36 и 38 удаляться друг от друга без открывания зажимных захватов 18.1, 18.2. Проход, ограничиваемый зажимами стопорных захватов 36 и 38, является достаточным для обеспечения прохождения контейнера В. Кроме того, за счет наклона по направлению к нижней части кожуха 8 контейнер В скользит под действием силы тяжести по направлению к кожуху устройства для извлечения. Устройством для извлечения затем извлекают контейнер, который только что был отведен к весам. Для разгрузки контейнера из каретки и размещения его на весах выполнено транспортирующее устройство.
После разгрузки контейнера из каретки транспортирующее устройство возвращают в положение для удаления следующего контейнера. Эти операции повторяют до опорожнения корпуса. Далее колесо 6 поворачивают на угол 45° в направлении против часовой стрелки так, чтобы ось Y кожуха 8 была расположена вертикально, и его отверстие было ориентировано вниз и располагалось напротив устройства для извлечения корпуса. Поскольку открывание зажимных захватов 18.1, 18.2 активируется электродвигателем, стопорные захваты 36, 38 открываются одновременно.
Корпус освобождается и за счет собственного веса падает в устройство для извлечения корпуса. Это устройство может быть образовано, например, корзиной, предназначенной для извлечения нескольких корпусов. Аналогично, что касается передних частей корпусов, устройство для извлечения передних частей может быть образовано корзиной, предназначенной для нескольких передних частей корпусов. После заполнения корзин для передних частей корпусов и корпусов эти корзины удаляют для выполнения последующей обработки.
Допускается открывание корпуса перед его поступлением на колесо, при этом колесо должно извлекать контейнеры друг за другом. Этот вариант более пригоден для погрузки-разгрузки объектов, которые не требуют содержания в закрытом объеме.
Это устройство для погрузки-разгрузки и управления корпусами, содержащими контейнеры, имеет высокую прочность, поскольку является полностью механическим. Кроме того, оно может содержать уменьшенное количество исполнительных устройств, поскольку наличие одного исполнительного устройства является достаточным для управления погрузочно-разгрузочным устройством. Кроме того, оно является очень надежным, при этом корпуса удерживают посредством зажимания, и предусмотрен продольный стопор, который исключает риск соскальзывания корпуса с колеса и облегчает извлечение контейнеров.
Кроме того, погрузка-разгрузка корпусов и контейнеров выполняется с большой осторожностью, и контейнеры не подвергаются значительным ударным нагрузкам. Таким образом, значительно снижается риск повреждения контейнеров, и обеспечивается безопасность погрузки-разгрузки.
Следовательно, погрузочно-разгрузочное устройство в соответствии с изобретением может быть использовано в технических областях, где требуются погрузка-разгрузка и транспортирование хрупких объектов.
Изобретение относится к погрузочно-разгрузочному устройству для корпусов и содержащихся в них контейнеров. Погрузочно-разгрузочное устройство содержит кожух, расположенный в колесе, вращающемся вокруг своей оси, и предназначенный для размещения корпуса, закрытый на первом продольном конце и открытый на втором продольном конце, удерживающее устройство (14), установленное в области второго конца кожуха и содержащее два зажимных захвата, которые прикладывают зажимное усилие к корпусу (Е), исполнительное устройство для открывания и закрывания зажимных захватов, два стопорных захвата (36, 38), каждый из которых поддерживается зажимным захватом и свободно поворачивается вокруг зажимного захвата, пружины (40), соединяющие стопорные захваты (36, 38), так что открывание зажимных захватов вызывает открывание стопорных захватов (36, 38), и стопорные захваты (36, 38) способны открываться независимо от зажимных захватов. Погрузочно-разгрузочное устройство имеет высокую прочность, является надежным, при этом исключен риск соскальзывания корпуса с колеса и облегчено извлечение контейнеров, снижен риск повреждения контейнеров и обеспечивается безопасность погрузки-разгрузки. 2 н. и 21 з.п. ф-лы, 5 ил.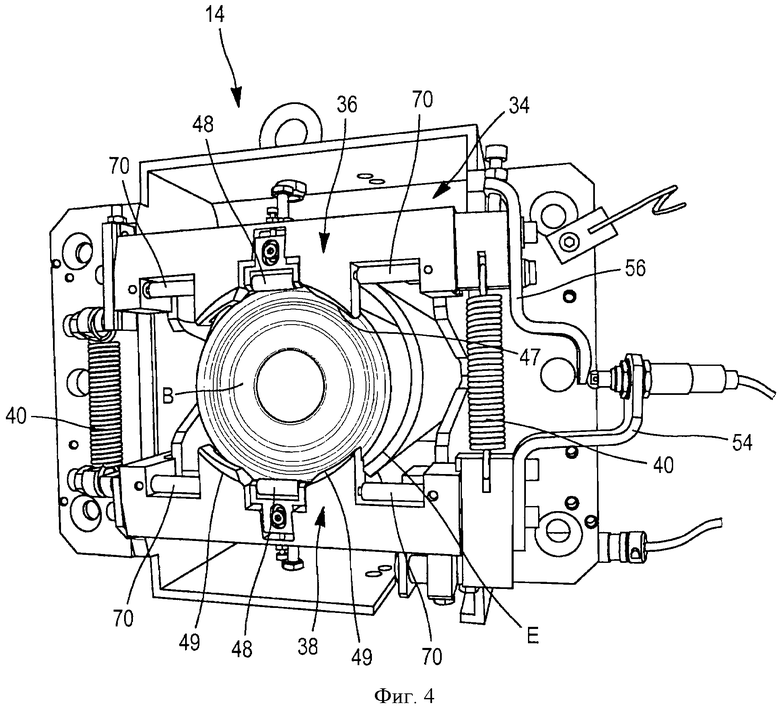
1. Погрузочно-разгрузочное устройство для корпуса, имеющего цилиндрическую форму, и содержащихся в нем контейнеров, включающее в себя кожух (8) с продольной осью (Y), предназначенный для размещения корпуса (E), закрытый на первом продольном конце и открытый на втором продольном конце, удерживающее устройство (14), установленное в области второго конца кожуха (8) и содержащее два зажимных захвата (18.1, 18.2), выполненных с возможностью перемещения вокруг оси (Z1, Z2), перпендикулярной продольной оси (Y) кожуха (8), и прикладывания зажимного усилия к корпусу (Е) для удерживания корпуса в кожухе (8) в продольном направлении, по меньшей мере одно исполнительное устройство для открывания и закрывания вышеуказанных зажимных захватов (18.1, 18.2), два стопорных захвата (36, 38), каждый из которых поддерживается зажимным захватом (18.1, 18.2) и выполнен с возможностью свободного поворота вокруг оси (Z1, Z2) вращения зажимного захвата (18.1, 18.2), при этом вышеуказанные стопорные захваты (36, 38) выполнены с возможностью сведения друг к другу в стопорное положение посредством упругих средств (40), причем открывание зажимных захватов (18.1, 18.2) вызывает открывание стопорных захватов (36, 38), и стопорные захваты (36, 38) выполнены с возможностью открытия независимо от зажимных захватов (18.1, 18.2).
2. Погрузочно-разгрузочное устройство по п. 1, содержащее колесо (6), установленное с возможностью вращения вокруг своей оси, при этом вышеуказанный кожух (8) расположен в вышеуказанном колесе (6) и проходит вдоль диаметра вышеуказанного колеса.
3. Погрузочно-разгрузочное устройство по п. 1 или 2, в котором один из зажимных захватов (18.1, 18.2) содержит заплечик, образующий продольный стопор для корпуса (E).
4. Погрузочно-разгрузочное устройство по п. 3, в котором другой зажимной захват (18.2, 18.1) содержит поверхность, наклоненную относительно оси (Y) кожуха (8) по направлению к его наружной стороне.
5. Погрузочно-разгрузочное устройство по п. 1 или 2, в котором по меньшей мере один из стопорных захватов (36, 38) содержит свободно вращающийся ролик, примыкающий к проходу, который ограничен двумя стопорными захватами (36, 38) для облегчения выхода объекта, содержащегося в корпусе.
6. Погрузочно-разгрузочное устройство по п. 1 или 2, в котором каждый стопорный захват (36, 38) содержит открывающие поверхности с обеих сторон прохода, ограничиваемого двумя стопорными захватами (36, 38), при этом вышеуказанные открывающие поверхности стопорного захвата (36, 38) расположены напротив открывающих поверхностей другого стопорного захвата (38, 36) и вышеуказанные открывающие поверхности выполнены с возможностью взаимодействия с уклонами (68), поддерживаемыми устройством для открывания.
7. Погрузочно-разгрузочное устройство по п. 6, в котором вышеуказанные открывающие поверхности содержат свободно вращающийся ролик, взаимодействующий с одним из вышеуказанных уклонов.
8. Погрузочно-разгрузочное устройство по п. 1 или 2, содержащее по меньшей мере один датчик для измерения положения стопорных захватов (36, 38).
9. Погрузочно-разгрузочное устройство по п. 8, содержащее одинарный датчик, измеряющий относительное положение стопорных захватов (36, 38), при этом вышеуказанный датчик поддерживается плечом, жестко связанным во время движения с одним из захватов (36, 38), и восприимчив к перемещению другого плеча, жестко связанного во время движения с другим стопорным захватом (38, 36).
10. Погрузочно-разгрузочное устройство по п. 1 или 2, содержащее исполнительное устройство для поворотного перемещения одного из зажимных захватов (18.1, 18.2) и средства для передачи движения другому зажимному захвату, вынуждая зажимные захваты (18.1, 18.2) удаляться друг от друга или сближаться.
11. Погрузочно-разгрузочное устройство по п. 10, в котором зажимные захваты (36, 38) содержат два боковых фланца, которые шарнирно соединены с рамой (20) погрузочно-разгрузочного устройства и в которых средства для передачи образованы зубьями, поддерживаемыми каждым боковым фланцем, при этом вышеуказанные боковые фланцы содержат зубья, входящие в зацепление таким образом, что вращение в одном направлении одного из зажимных захватов вызывает вращение другого зажимного захвата (18.1, 18.2) в противоположном направлении.
12. Погрузочно-разгрузочное устройство по п. 1 или 2, в котором упругие средства (40), отводящие назад стопорные захваты (36, 38), содержат две винтовые пружины, расположенные с обеих сторон продольной оси (Y) кожуха (8), при этом каждая винтовая пружина прикреплена одним концом к одному стопорному захвату (36, 38), а другим концом - к другому стопорному захвату (38, 36).
13. Погрузочно-разгрузочное устройство по п. 12, содержащее средства регулирования натяжения пружин.
14. Погрузочно-разгрузочное устройство по п. 1 или 2, содержащее устройство для перемещения корпуса вдоль продольной оси (Y) кожуха (8), расположенное в кожухе (8).
15. Установка для погрузки-разгрузки корпуса и содержащихся в нем контейнеров, включающая в себя погрузочно-разгрузочное устройство по любому из пп. 1-14, устройство для открывания корпусов для отделения передней части корпуса от корпуса и обеспечения доступа к объектам, содержащимся в корпусе, и устройство для удаления и извлечения объектов, содержащихся в корпусах.
16. Установка по п. 15, в которой погрузочно-разгрузочное устройство содержит колесо (6), вращающееся вокруг оси, при этом вышеуказанный кожух (8) расположен в вышеуказанном колесе (6) и проходит вдоль диаметра вышеуказанного колеса, и в которой устройство для открывания корпусов и устройство для удаления и извлечения объектов, содержащихся в корпусах, расположены вокруг колеса (6).
17. Установка по п. 16, в которой устройство для открывания корпусов является режущим устройством, расположенным над колесом (6), а устройство для удаления и извлечения расположено под колесом (6), так что удаление объектов из корпуса достигается посредством собственного веса.
18. Установка по п. 17, в которой во время удаления объектов продольная ось (Y) кожуха (8) ориентирована под углом 45° относительно горизонтального направления.
19. Установка по любому из пп. 15-18, в которой устройство для удаления и извлечения содержит плечо с продольной осью (А), перемещаемое по меньшей мере при вращении вокруг оси, параллельной оси колеса (6), каретку, установленную с возможностью перемещения по плечу вдоль продольной оси (А) плеча, гнездо, поддерживаемое кареткой и предназначенное для размещения объекта, содержащегося в корпусе, и средства (66, 68) открывания стопорных захватов (36, 38).
20. Установка по п. 19, в которой средства (66, 68) открывания стопорных захватов (36, 38) содержат четыре пальца (66), которые поддерживаются кареткой и примыкают к кожуху, при этом вышеуказанные пальцы (66) ориентированы параллельно продольной оси (А) плеча, и каждый из них имеет свободный конец с уклоном (68), предназначенным для взаимодействия со стопорными захватами (36, 38) таким образом, что в случае, когда пальцы (66) вставлены между стопорными захватами (36, 38), эти захваты удаляются друг от друга.
21. Установка по п. 19, в которой каретка содержит средства обнаружения присутствия объекта.
22. Установка по п. 16, содержащая устройство для извлечения опорожненного корпуса, расположенное под колесом таким образом, чтобы удаление опорожненного корпуса обеспечивалось посредством собственного веса, и устройство для извлечения передних частей корпусов.
23. Установка по п. 15, которая размещена в перчаточной камере, а объекты являются контейнерами, содержащими оксид плутония.
| FR 2964091 A1, 02.03.2012 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| 0 |
|
SU56704A1 | |

