Область техники, к которой относится изобретение, и уровень техники
Изобретение относится к устройству для манипулирования объектами в перчаточном боксе, а более конкретно к устройству манипулирования контейнерами в перчаточном боксе, на установке для производства ядерного топлива, к примеру, контейнерами, заполненными плутонием.
Производство ядерного топлива требует использования перчаточных боксов, во внутренней полости которых находится оборудование для работы с материалами, используемыми для производства ядерного топлива, и оборудование для производства ядерного топлива, к примеру, в форме таблеток.
В случае производства МОХ-топлива используются оксид плутония, оксид урана и шамот.
Плутоний получается, в частности, в результате переработки сборок отработавшего ядерного топлива; плутоний помещают в герметичные контейнеры, которые затем направляют на производственный участок или завод по производству тепловыделяющих элементов.
Для работы с этими контейнерами предусмотрено манипуляционное устройство, заключенное в перчаточный бокс и способное перемещать контейнер одновременно вдоль вертикальной оси и вдоль горизонтальной оси. Это манипуляционное устройство транспортирует контейнер до самого разгрузочного колеса, где он опорожняется, в частности - после его извлечения из оболочки.
Это манипуляционное устройство включает в себя тележку, снабженную корзиной для удержания контейнера с оксидом плутония. Эта тележка может свободно перемещаться горизонтально по рельсам, а также перемещаться вертикально. Горизонтальным перемещением управляют электродвигатель и система реечно-шестеренного типа, при этом шестерня зафиксирована от проворачивания непосредственно на вале электродвигателя. Точно так же предусмотрен электродвигатель для перемещения тележки вдоль вертикальной оси. Валы электродвигателей выдаются книзу, в частности, в случае электродвигателя для горизонтального перемещения тележки. Последняя непосредственно снабжена шестерней, которая имеет зацепление с зубчатой рейкой. Количество необходимых частей, таким образом, сокращено.
Как описано выше, это устройство заключено в перчаточный бокс, то есть в случае работы с контейнерами с оксидом плутония, - в зону сильного излучения. Если в манипуляционном устройстве возникнет неисправность, то, очевидно, о проникновении оператора в перчаточный бокс не может идти и речи, поскольку любая операция техобслуживания должна осуществляться с использованием перчаток и перчаточных обойм, закрепленных на стенках перчаточного бокса. В результате любая операция техобслуживания может оказаться продолжительной и утомительной, поскольку устройство могло быть не рассчитано на его легкое извлечение из перчаточного бокса. Кроме того, в случае неисправности электродвигателя или сбоя энергоснабжения желательно иметь возможность продолжать перемещать тележки вертикально и/или горизонтально, чтобы завершить операцию или извлечь контейнер с плутонием.
Конструкция манипуляционного устройства, описанная выше, не может обеспечивать ручной возврат тележки в исходную позицию, поскольку двигатель горизонтального перемещения зафиксирован от проворачивания непосредственно на шестерне реечно-шестеренной системы. Кроме того, демонтаж двигателей относительно сложен, поскольку двигатели расположены на основании манипуляционного устройства в зоне затрудненного доступа.
Раскрытие изобретения
Таким образом, задача изобретения состоит в создании устройства для манипулирования объектами в замкнутых пространствах, конструкция которого упрощает техобслуживание и допускает ручное перемещение объектов, к примеру, в случае неисправности.
Вышеуказанная задача решена в манипуляционном устройстве, включающем в себя тележку, которая может перемещаться, по меньшей мере, горизонтально, по рельсам, причем эта тележка включает в себя корзину, в которую может быть помещен объект, к примеру, контейнер с оксидом плутония, электродвигатель, реечно-шестеренный узел, при этом шестерня приводится во вращение электродвигателем, который ориентирован так, чтобы его вал был расположен вертикально и выдавался над устройством в противоположном направлении от реечно-шестеренного узла, крутящий момент, создаваемый электродвигателем, передается посредством передаточного вала, продолжающегося параллельно ротору электродвигателя между верхней частью устройства и нижней частью устройства, на которой расположен реечно-шестеренный узел, вал двигателя и передаточный вал соединены между собой передаточными средствами, при этом имеются также средства расцепления для обеспечения ручного управления реечно-шестеренным узлом через передаточный вал.
Другими словами, электродвигатель больше не зафиксирован от проворачивания непосредственно на реечно-шестеренном узле, так что тележкой можно управлять вручную, и, кроме того, расположение двигателя в верхней части упрощает его отсоединение в случае неисправности, а ручное управление легко осуществимо сверху. Это устройство содержит больше элементов, чем известное манипуляционное устройство, и все же оно легко поддается техобслуживанию и обеспечивает значительную экономию времени.
Кроме того, известное устройство было статически неопределимо, в частности потому, что электродвигатель был зафиксирован от проворачивания непосредственно на шестерне, что могло создавать опорные точки и вызывать трудности при выявлении неисправностей. С помощью же устройства по настоящему изобретению эта статическая неопределенность исключена и неисправность может выявляться быстрее.
Крайне предпочтительно, чтобы тележка могла перемещаться и вдоль вертикальной оси посредством электродвигателя; предпочтительно, чтобы этот двигатель был расположен параллельно двигателю горизонтального перемещения, а его вал выступал из устройства аналогично валу двигателя горизонтального перемещения.
Двигатель оборудован также системой расцепления, позволяющей управлять тележкой вручную для регулировки ее вертикальной позиции.
Крайне предпочтительно, чтобы различные элементы были установлены посредством устройств с отверстиями для ключей, позволяющими использовать невыпадающие винты, что облегчает монтаж и демонтаж различных элементов одной рукой, ускоряя техобслуживание.
Объектом настоящего изобретения является устройство для манипулирования объектами в перчаточном боксе, включающее в себя тележку для поддержания объектов манипуляций, основание, относительно которого тележка может перемещаться вдоль первой оси, монтажную панель, которая также может перемещаться вдоль первой оси, средства перемещения тележки вдоль первой оси, включающие в себя первый электродвигатель, закрепленный на монтажной панели так, чтобы его вал был перпендикулярен первой оси и выдавался по другую сторону от основания, передаточный вал, закрепленный на монтажной панели параллельно первому двигателю, средства передачи вращения от приводного вала к передаточному валу, зубчатую рейку, закрепленную на основании вдоль первой оси, и шестерню, зафиксированную от проворачивания непосредственно на передаточном вале и имеющую зацепление с зубчатой рейкой, при этом средства перемещения вдоль первой оси включают в себя также средства расцепления, расположенные между первым электродвигателем и передаточным валом, и средства ручного управления для обеспечения перемещения тележки вдоль первой оси без помощи первого электродвигателя.
Предпочтительно, чтобы средства передачи вращения от вала первого электродвигателя к передаточному валу состояли из передаточного ремня.
К примеру, средства расцепления включают в себя отцепной шкив и выдвижные средства для фиксации его от проворачивания на ведущем шкиве, зафиксированного от проворачивания на вале первого электродвигателя, причем ремень соединяет отцепной шкив с передаточным валом и указанный отцепной шкив имеет ручку для приведения во вращение отцепного шкива, когда он больше не зафиксирован на ведущем шкиве.
Предпочтительно, чтобы тележка могла перемещаться вдоль второй оси, для чего указанное устройство содержит средства перемещения тележки вдоль второй оси, включающие в себя второй электродвигатель, закрепленный на монтажной панели так, чтобы его вал был перпендикулярен первой оси и выступал противоположно основанию, средства преобразования для преобразования вращения электродвигателя в поступательное перемещение тележки вдоль второй оси, средства передачи вращения от вала второго электродвигателя к средствам преобразования, причем указанные средства перемещения вдоль второй оси включают в себя также средства расцепления, расположенные между вторым двигателем и средствами преобразования, и средства ручного управления указанными средствами преобразования.
Предпочтительно, чтобы средства преобразования состояли из шарикового винта.
Предпочтительно, чтобы средства передачи вращения от вала второго электродвигателя к средствам преобразования состояли из передаточного ремня.
К примеру, средства расцепления включают в себя отцепной шкив и выдвижные средства для фиксации его от проворачивания на ведущем шкиве, сцепленном с валом второго электродвигателя, при этом ремень соединяет отцепной узел с шариковым винтом второго электродвигателя, причем указанный отцепной шкив имеет ручку для его вращения, когда он больше не зафиксирован на ведущем шкиве.
Устройство может включать в себя, по меньшей мере, одну колонну для направленного перемещения тележки вдоль второй оси.
Предпочтительно, чтобы первая ось была горизонтальной, а вторая ось - вертикальной.
Предпочтительно, чтобы основание имело направляющие рельсы, расположенные вдоль первой оси, а тележка имела направляющие ролики, взаимодействующие с указанными рельсами.
В одном примере осуществления настоящего изобретения форма монтажной панели в вертикальной ориентации может быть близка к плоской, и первый электродвигатель подвешен к кронштейну, закрепленному на боковой стороне монтажной панели.
Предпочтительно, чтобы передаточный вал был смонтирован посредством двух опор на одной боковой стороне монтажной панели, противоположной стороне, к которой подвешен первый электродвигатель, причем указанные опоры закреплены на монтажной панели с возможностью их отсоединения.
Второй электродвигатель может быть подвешен к кронштейну, закрепленному на боковой стороне монтажной панели.
Предпочтительно, чтобы шариковинтовая передача и направляющие колонны были смонтированы на той же боковой стороне монтажной панели, что и передаточный вал.
Предпочтительно, чтобы тележка имела, по меньшей мере, одну корзину, в которой должен размещаться контейнер, причем указанная корзина имеет две боковых стенки, обращенных друг к другу и разграничивающих корпус, приспособленный для вмещения контейнера, указанный корпус включает в себя, по меньшей мере, одно боковое отверстие и дно, в котором выполнена выемка, а каждая из боковых стенок имеет горизонтальную опору для вертикального поддержания контейнера.
Контейнер может иметь форму цилиндра с круговым сечением, при этом боковые стенки корзины будут иметь сечение в форме дуги окружности, разграничивая корпус, внутренний диаметр которого соответствует внешнему диаметру контейнера.
Устройство может включать в себя подъемные средства, предназначенные для помещения контейнера на его место в корзине, при этом подъемник включает в себя телескопический вал, расположенный вдоль вертикальной оси, и опору, закрепленную на вале и имеющую форму, соответствующую форме выемки в дне корзины.
Краткое описание чертежей
Настоящее изобретение будет лучше понято после ознакомления с приведенным ниже описанием и сопроводительными чертежами.
На фиг. 1 показано манипуляционное устройство, соответствующее одному примеру осуществления настоящего изобретения, вид в перспективе;
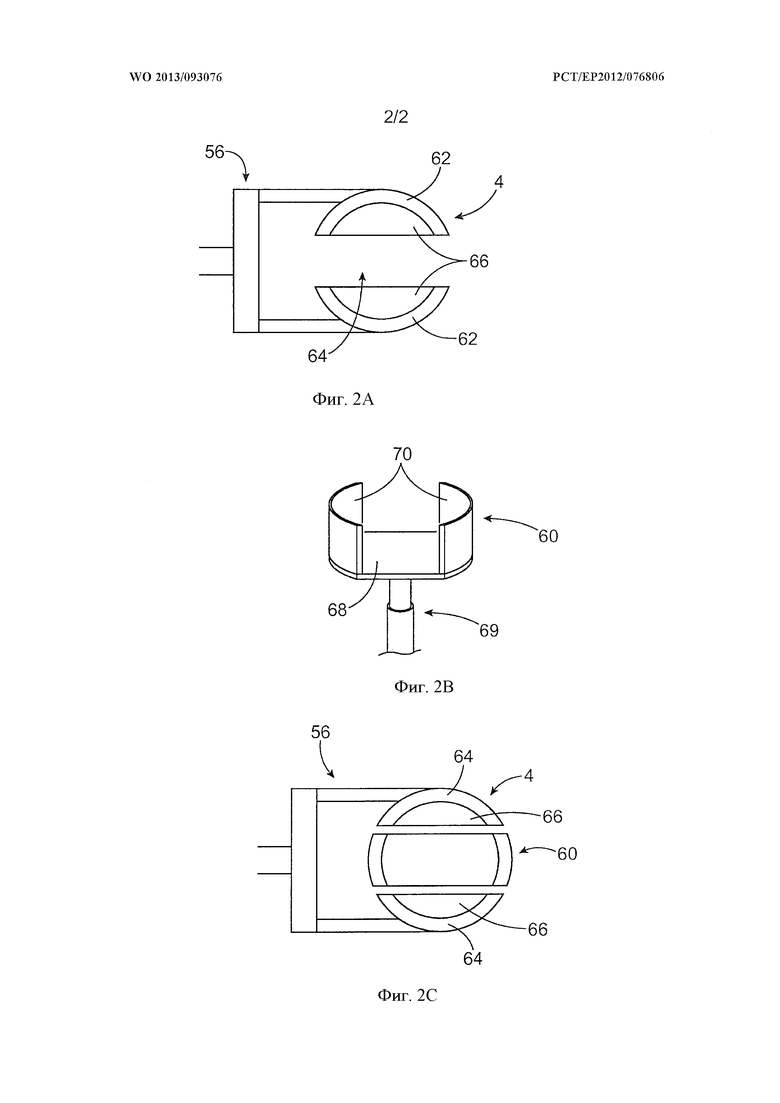
на фиг. 2А и 2В схематично показаны, соответственно, корзина, установленная на тележке устройства, изображенного на фиг. 1, и подъемная система для установки контейнера на место в корзине;
на фиг. 2С показаны корзина и подъемник в положении, когда контейнер установлен на место, при этом контейнер показан пунктиром, вид сверху.
Подробное описание частных примеров осуществления
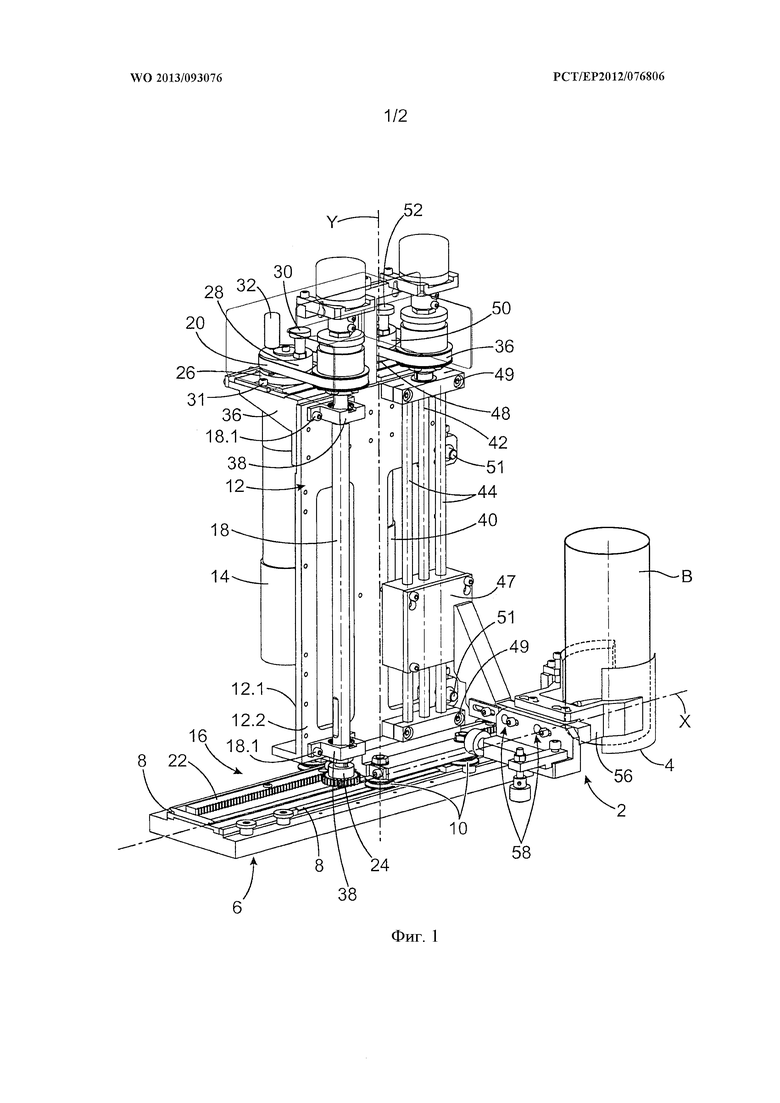
На фиг. 1 представлен вид в перспективе манипуляционного устройства, соответствующего одному примеру осуществления настоящего изобретения.
Это манипуляционное устройство предназначено, в частности, для манипуляций с объектами в замкнутом пространстве, таком как перчаточный бокс на установке для производства ядерного топлива. Помещаемые объекты могут представлять собой, к примеру, контейнеры, заполненные оксидом плутония, предназначенным для производства таблеток МОХ-топлива. Оставшаяся часть данного описания посвящена манипуляциям с контейнером, содержащим оксид плутония, однако подразумевается, что это устройство может перемещать любой другой объект.
Манипуляционное устройство по фиг. 1 включает в себя тележку 2, снабженную корзиной 4, внутри которой расположен цилиндрический контейнер с оксидом плутония, обозначенный пунктиром. Этот контейнер обозначен как В.
Манипуляционное устройство включает в себя основание 6, снабженное рельсами 8 для линейно-направленного перемещения тележки 2 вдоль горизонтальной оси X. Тележка 2 содержит средства взаимодействия с рельсами 8. Крайне предпочтительно, чтобы этими средствами являлись направляющие ролики 10, преимущество которых заключается в том, что они менее чувствительны к пыли по сравнению с другими системами, такими как шаровые вкладыши.
В иллюстрируемом примере тележка 2 может перемещаться вдоль оси X и вдоль оси Y, перпендикулярной оси X в вертикальном направлении. Объем настоящего изобретения распространяется на манипуляционное устройство, обеспечивающее перемещение только вдоль горизонтальной оси.
Манипуляционное устройство включает в себя вертикальную монтажную панель 12, которая может перемещаться горизонтально вместе с тележкой.
Манипуляционное устройство включает в себя средства перемещения вдоль горизонтальной оси X, которые сформированы из первого электродвигателя 14, ось Y1 которого ориентирована вертикально, реечно-шестеренного узла 16, передаточного вала 18 и ремня 20, при этом узел из ремня 20 и передаточного вала 18 передает вращательное движение от вала электродвигателя 14 к реечно-шестеренному узлу 16. Преимущество использования ремня для передачи привода от электродвигателя 14 к передаточному валу 18 состоит в том, что ремень - это устройство, незначительно чувствительное к пыли. К тому же он позволяет упростить операции демонтажа и повторного монтажа.
В качестве альтернативы может быть установлена цепная передача.
Реечно-шестеренный узел 16 включает в себя зубчатую рейку 22 с осью X, закрепленную на основании 6, и шестерню 24, непосредственно соединенную с передаточным валом 18 и имеющую зацепление с рейкой 22.
Первый электродвигатель 14 закреплен на верхе вертикальной монтажной панели 12, при этом вал электродвигателя 14 выдается над устройством по другую сторону от основания 6, поддерживающего реечно-шестеренный узел.
Крайне предпочтительно, чтобы между первым электродвигателем 14 и передаточным валом 18 были предусмотрены средства расцепления, а также ручные средства, для приведения во вращение передаточного вала 18, что позволит горизонтально перемещать тележку 2 в случае неисправности первого электродвигателя.
Средства расцепления образованы ведущим шкивом 26, непосредственно соединенным в валом 14 электродвигателя, и отцепным шкивом 28, который при обычных условиях эксплуатации приводится во вращение ведущим шкивом 26 посредством стопорного пальца 30, проходящего через отцепной шкив 28 и заходящего в ведущий шкив 26. Отцепной шкив 28 приводит во вращение приводной ремень 20.
Предпочтительно, чтобы отцепной шкив 28 имел также ручку 32, выступающую вверх от отцепного шкива 28 и позволяющую поворачивать отцепной шкив 28 вокруг его оси в случае неисправности электродвигателя 14 или в любых других случаях, требующих ручного перемещения тележки вдоль оси X.
Оператор сообщает стопорному пальцу 30 усилие, направленное вверх, для извлечения его конца из ведущего шкива 26 и отцепления отцепного шкива 28 от ведущего шкива 26.
Затем оператор поворачивает отцепной шкив 28 вокруг его оси с помощью ручки 32, перемещая таким образом передаточный ремень 20, передаточный вал 18 и шестерню 24, имеющую зацепление с зубчатой рейкой 22. Тем самым тележка перемещается вручную вдоль оси X. Направление перемещения тележки 2 зависит от направления поворота отцепного шкива 28. Преимуществом такой конструкции является то, что ни один элемент не требуется удалять, что исключает риск его падения в перчаточный бокс во время удаления и сбоев в работе устройства.
Можно предусмотреть также возможность непосредственного поворота передаточного вала вокруг своей оси без участия отцепного шкива и передаточного ремня. К примеру, это можно сделать посредством удаления передаточного ремня, что устраняет необходимость использования отцепного шкива.
Однако при этом возрастает продолжительность работ.
Первый электродвигатель 14 подвешен к вертикальной монтажной панели 12 посредством кронштейна 36, закрепленного на поверхности 12.1 вертикальной монтажной панели 12. Электродвигатель 14 закреплен на кронштейне 36 с помощью винтов 31, доступ к которым легко осуществим через верх устройства, что позволяет легко отсоединить электродвигатель 14.
Крайне предпочтительно, чтобы передаточный вал был закреплен на вертикальной монтажной панели 12 посредством двух опор 38, расположенных на стороне 12.2, противоположной стороне 12.1, на которой закреплен электродвигатель 14. Опоры закреплены на вертикальной монтажной панели посредством винтов 18.1, доступ к которым так же легко осуществим оператором через перчаточные обоймы перчаточного бокса. Первый электродвигатель 14 снимается так же легко, как передаточный вал 18.
Предпочтительно, в соответствии с иллюстрируемым примером, чтобы манипуляционное устройство включало в себя также средства для перемещения тележки 2 вдоль вертикальной оси Y, которые включают в себя второй электродвигатель 40 и шариковинтовую передачу 42. Может также использоваться шкиво-ременная система, приводимая в движение шестерней, или любые другие средства, имеющие привод от электродвигателя, для вертикального перемещения тележки.
Предпочтительно, в соответствии с фиг. 1, чтобы устройство включало в себя две вертикальные направляющие колонны 44, которые расположены по разные стороны от шарикового винта, для вертикального направленного перемещения тележки 2.
Крайне предпочтительно, по аналогии с конструкцией первого электродвигателя 14, чтобы второй электродвигатель 40 был расположен вертикально, параллельно первому электродвигателю 14, при этом его вал выступал над манипуляционным устройством и был соединен с шариковым винтом 42 посредством ремня 36. Предпочтительно также, чтобы между вторым электродвигателем 40 и шариковым винтом 42 были предусмотрены средства ручного расцепления и управления, обеспечивающие ручное перемещение тележки вдоль вертикальной оси Y.
Тележка 2 закреплена на шариковом винте посредством платформы 47 линейно-направленного перемещения, которая перемещается поступательно вдоль направляющих колонн. Могут быть предусмотрены и другие средства расцепления и перемещения, к примеру, средства ручного расцепления и перемещения тележки вдоль горизонтальной оси.
Крайне предпочтительно, чтобы узел из шариковинтовой передачи и направляющих колонн был закреплен на боковой стороне вертикальной монтажной панели 12 посредством винтов 49, легко досягаемых для оператора, на той же стороне, что и передаточный вал 18. Также предпочтительно, чтобы второй электродвигатель 40 был закреплен на монтажной панели будучи подвешенным к кронштейну (не показан), на той же стороне монтажной панели 12, что и электродвигатель 14, причем винты для закрепления первого электродвигателя также досягаемы сверху устройства.
Средства расцепления второго электродвигателя 40 сформированы из ведущего шкива 48, непосредственно зафиксированного на валу электродвигателя 40, и отцепного шкива 50, который при обычных условиях эксплуатации приводится во вращение ведущим шкивом 48 посредством стопорного пальца 52, проходящего через отцепной шкив 50 и заходящего в ведущий шкив 48. Отцепной шкив приводит во вращение приводной ремень 36. Отцепной шкив 50 имеет также поворотную ручку (не показана), отходящую вертикально кверху от отцепного шкива 50, для поворота отцепного шкива 50 вокруг его оси.
Ручное перемещение тележки вдоль вертикальной оси аналогично ручному перемещению этой тележки вдоль горизонтальной оси и поэтому не требует дополнительного описания. Расположение первого электродвигателя и передаточного вала по разные стороны от вертикальной монтажной панели 12 никоим образом не является ограничивающим. К примеру, электродвигатель 14 и передаточный вал могут располагаться на одной стороне монтажной панели. Описанное и проиллюстрированное расположение электродвигателя 40 и шариковинтовой передачи также никоим образом не является ограничивающим.
Преимуществом же проиллюстрированной компоновки устройства является то, что она компактна, уравновешивает нагрузки на каждой стороне монтажной панели и обеспечивает предельно легкий доступ к различным частям.
Далее детально описана корзина 4, в которой установлен контейнер В с оксидом плутония.
На фиг. 1 изображена корзина, закрепленная на тележке 2 посредством вилочного захвата 56, а также посредством отверстий для ключа и невыпадающих винтов 58, облегчающих размещение корзины и регулировку ее позиции.
На фиг. 2А и 2С представлены схематичные виды сверху корзины 4, а на фиг. 2В представлен схематичный вид устройства 60 для подъема контейнера, которое предназначено для размещения контейнера В в корзине 4 и его извлечения оттуда.
В соответствии с фиг. 2А, корзина имеет две боковые стенки 62 с сечением в форме дуги окружности, и дно 64 с выемкой, причем дно образовано двумя участками 66, зафиксированными на нижних краях боковых стенок 62, так что выемка в дне имеет форму, близкую к прямоугольной, и участки 66 поддерживают боковые края дна контейнера В. Каждая из боковых стенок 62 корзины зафиксирована на плече вилочного захвата 56, так что две боковых стенки 62 обращены друг к другу и разграничивают круговой корпус, как это видно сверху, внутренние габариты которого соответствуют внешним габаритам контейнера В.
На фиг. 2В представлен схематичный вид подъемника 60 контейнеров, позволяющего помещать контейнер В в корзину 4 и извлекать его оттуда. Подъемник 60 включает в себя опору 68 и телескопический вал 69 с вертикальной осью, который закреплен на опоре и может перемещать ее вертикально. Опора 68 имеет форму, близкую к прямоугольной, и ограничена на двух своих краях двумя крайними стенками 70 в форме дуги окружности, имеющими малую высоту, причем размеры опоры соответствуют размерам выемки в дне 64 корзины 4, благодаря чему опора может заходить в эту выемку, как схематично показано на фиг. 2С. Опора 68 и боковые стенки 62 ограничивают пространство, внутренние габариты которого соответствуют внешним габаритам контейнера В, и, в частности, - диаметру дна контейнера В.
Далее будет описана операция размещения контейнера В в корзине с использованием подъемника 60. Контейнер В погружается на опору 68 подъемника 60. Вал 69 подъемника выдвигается, так что опора, удерживающая контейнер В, перемещается на достаточно высокую позицию и две боковые стенки 62 корзины 4 могут быть размещены по разные стороны телескопического вала 69 подъемника. Корзина приближается к валу, так что две боковые стенки 62 корзины располагаются по разные стороны от телескопического вала 69. В этой позиции контейнер В расположен над корзиной и вал 69 проходит через выемку в дне корзины. Наконец, подъемник опускается, в результате чего контейнер В оказывается расположенным между боковыми стенками и на дне корзины 4. Продолжая опускаться, подъемник отделяется от контейнера, который полностью упирается в дно корзины.
В качестве альтернативы можно предусмотреть, чтобы корзина, поддерживаемая тележкой, перемещалась вертикально вверх для подхватывания контейнера и снятия его с опоры подъемника. Корзина и подъемник позволяют весьма просто перегрузить контейнер В без необходимости каких-либо важных настроек и предотвращают любое взаимодействие между подъемником и корзинами, способное нарушить корректное функционирование устройства.
Форма корзины никоим образом не является ограничивающей. Возможно манипулирование одновременно несколькими объектами. К примеру, контейнер может иметь квадратное или эллиптическое сечение, и в этом случае форма корзины будет приспособлена к этой форме.
Предпочтительно оборудовать манипуляционное устройство датчиками для регистрации вертикальных и горизонтальных позиций тележки; эти датчики вертикального перемещения тележки могут, к примеру, быть индуктивными, при этом они обозначены на фиг. 1 ссылочной позицией 51 и закреплены на вертикальной монтажной панели 12 на той же стороне, что и направляющие колонны. Оператор может легко осуществлять доступ к этим датчикам и заменять их в случае неисправности.
Таким образом, манипуляционное устройство по настоящему изобретению упрощает техническое обслуживание в случае неисправности любого из его элементов, поскольку его конструкция образует все эти элементы, или, во всяком случае, все элементы, подверженные риску неисправности, легко досягаемы для оператора, который может легко снять их одной рукой, действуя за пределами перчаточного бокса с использованием перчаток, закрепленных на перчаточных обоймах. Это устройство допускает также ручное перемещение тележки вдоль горизонтальной оси и вертикальной оси, возврат тележки в ее исходную позицию для завершения операции, что позволяет избежать прерывания уже выполняемой операции.
Это манипуляционное устройство может быть использовано на установке любого типа, где требуется манипулирование на замкнутых участках с затрудненным доступом, когда техобслуживание может быть затруднено и утомительно.
Изобретение относится к устройству для манипулирования объектами в перчаточном боксе. Устройство содержит тележку (2) для поддержания объектов, подверженных манипуляциям, основание (6), относительно которого тележка (2) может перемещаться вдоль горизонтальной оси (X), средства для перемещения тележки (2) вдоль первой оси (X). Причем приводные средства содержат электродвигатель (14), вал которого перпендикулярен оси (X) и выступает противоположно основанию (6), передаточный вал (18), параллельный электродвигателю (14), зубчатую рейку (22), закрепленную на основании (6) вдоль оси (X), и шестерню (24), зафиксированную от проворачивания непосредственно на передаточном вале (18) и имеющую зацепление с зубчатой рейкой (22). При этом приводные средства для перемещения вдоль первой оси (X) дополнительно содержат средства расцепления, расположенные между электродвигателем и передаточным валом, и средства ручного управления для обеспечения перемещения тележки (2) вдоль первой оси (X) без использования электродвигателя (14). Изобретение обеспечивает упрощение техобслуживания при манипулировании объектами в замкнутых пространствах и допускает ручное перемещение объектов в случае неисправности. 16 з.п. ф-лы, 2 ил.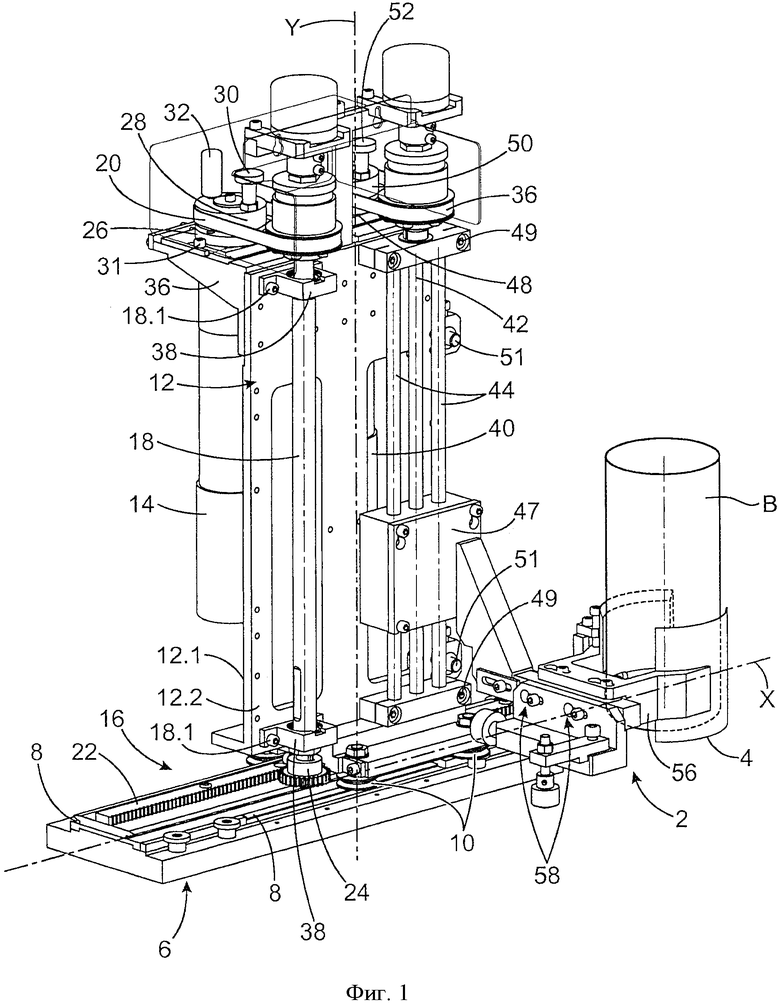
1. Устройство для манипулирования объектами в перчаточном боксе, содержащее тележку (2) для поддержания объектов, подвергаемых манипуляциям, основание (6), относительно которого тележка (2) выполнена с возможностью перемещения вдоль первой оси (X), монтажную панель (12), выполненную с возможностью перемещения вдоль первой оси (X), приводные средства для перемещения тележки (2) вдоль первой оси (X), причем указанные приводные средства включают в себя первый электродвигатель (14), закрепленный на монтажной панели (12) так, что его вал перпендикулярен первой оси (X) и выступает противоположно основанию (6), передаточный вал (18), закрепленный на монтажной панели (12) параллельно первому двигателю, средства для передачи вращения от приводного вала к передаточному валу, зубчатую рейку (22), закрепленную на основании (6) вдоль первой оси (X), и шестерню (24), непосредственно зафиксированную от проворачивания на передаточном валу (18) и входящую в зацепление с зубчатой рейкой (22), при этом приводные средства для перемещения вдоль первой оси (X) дополнительно включают в себя средства расцепления, расположенные между первым двигателем и передаточным валом, и средства ручного управления для обеспечения перемещения тележки (2) вдоль первой оси (X) без использования первого электродвигателя (14).
2. Устройство по п. 1, отличающееся тем, что средства передачи вращения от приводного вала первого электродвигателя (14) к передаточному валу (18) представляют собой передаточный ремень (20).
3. Устройство по п. 2, отличающееся тем, что средства расцепления включают в себя отцепной шкив и выдвижные средства для его фиксации от проворачивания на ведущем шкиве, зафиксированном от проворота на приводном валу первого электродвигателя, ремень (20), соединяющий отцепной шкив с передаточным валом (18), причем указанный отцепной шкив имеет ручку для приведения его во вращение, когда он отсоединен от ведущего шкива.
4. Устройство по любому из пп. 1-3, отличающееся тем, что тележка (2) выполнена с возможностью перемещения вдоль второй оси (Y), при этом указанное устройство содержит средства для перемещения тележки (2) вдоль второй оси (Y), причем указанные средства перемещения включают в себя второй электродвигатель (40), закрепленный на монтажной панели (12) так, что его приводной вал перпендикулярен первой оси (X) и выступает противоположно основанию (6), средства преобразования для преобразования вращения электродвигателя в поступательное перемещение тележки вдоль второй оси (Y), средства для передачи вращения от вала второго электродвигателя к средствам преобразования, причем указанные средства перемещения вдоль второй оси (Y) включают в себя средства расцепления, расположенные между вторым двигателем и средствами преобразования, и средства ручного управления указанными средствами преобразования.
5. Устройство по п. 4, отличающееся тем, что средства преобразования представляют собой шариковый винт (42).
6. Устройство п. 4, отличающееся тем, что средства передачи вращения от вала второго электродвигателя (40) к средствам преобразования состоят из передаточного ремня.
7. Устройство по п. 6, отличающееся тем, что средства расцепления включают в себя отцепной шкив и выдвижные средства для его фиксации от проворачивания на ведущем шкиве, зафиксированном от проворачивания на приводном валу второго электродвигателя, ремень соединяет отцепной шкив с шариковым винтом (42), причем указанный отцепной шкив имеет ручку для его вращения, когда он отсоединен от ведущего шкива.
8. Устройство по п. 4, отличающееся тем, что оно включает в себя по меньшей мере одну колонну для направленного перемещения тележки (2) вдоль второй оси (Y).
9. Устройство по п. 4, отличающееся тем, что первая ось (X) является горизонтальной осью, а вторая ось (Y) является вертикальной осью.
10. Устройство по любому из пп. 1-3, отличающееся тем, что основание (6) содержит направляющие рельсы вдоль первой оси (X), а тележка имеет направляющие ролики, взаимодействующие с указанными рельсами.
11. Устройство по любому из пп. 1-3, отличающееся тем, что монтажная панель имеет плоскую форму и ориентирована вертикально, при этом первый электродвигатель (14) подвешен к кронштейну, закрепленному на боковой стороне монтажной панели (12).
12. Устройство по п. 11, отличающееся тем, что передаточный вал (18) смонтирован посредством двух опор (38) на одной боковой стороне монтажной панели (12), противоположной стороне, к которой подвешен первый электродвигатель (14), причем указанная опора закреплена на монтажной панели (12) с возможностью отсоединения от нее.
13. Устройство по п. 4, отличающееся тем, что второй электродвигатель подвешен к кронштейну, закрепленному на боковой стороне монтажной панели (12).
14. Устройство по п. 4, отличающееся тем, что передаточный вал смонтирован посредством двух опор на одной боковой стороне монтажной панели, противоположной стороне, к которой подвешен первый электродвигатель, причем указанная опора закреплена на монтажной панели с возможностью отсоединения от нее, при этом второй электродвигатель подвешен к кронштейну, закрепленному на боковой стороне монтажной панели, причем средства преобразования и колонны для перемещения расположены на той же боковой стороне монтажной панели, на которой расположен передаточный вал (18).
15. Устройство по любому из пп. 1-3, отличающееся тем, что тележка (2) имеет по меньшей мере одну корзину (4), выполненную с возможностью приема контейнера (В), причем указанная корзина имеет две боковые стенки (62), обращенные друг к другу и ограничивающие корпус, выполненный с возможностью приема контейнера (B), при этом указанный корпус имеет по меньшей мере одно боковое отверстие и дно (64), в котором выполнена выемка, и каждая из боковых стенок (62) имеет горизонтальную опору (66) для вертикального поддержания контейнера.
16. Устройство по п. 15, отличающееся тем, что контейнер (B) имеет форму цилиндра с круговым сечением, при этом боковые стенки (62) имеют сечение в форме дуги окружности, ограничивая гнездо, внутренний диаметр которого соответствует внешнему диаметру контейнера.
17. Устройство по п. 15, отличающееся тем, что оно включает в себя подъемные средства (60), выполненные с возможностью установки контейнера (B) на место в корзине (4), причем подъемник содержит телескопический вал (69), расположенный вдоль вертикальной оси, и опору (68), закрепленную на валу, форма которой ответна форме выемки в дне корзины.
| US 5219215 A, 15.06.1993 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАПРЯЖЕННОСТИ МАГНИТНОГО ПОЛЯ | 0 |
|
SU390483A1 |
| МНОГОЭТАЖНОЕ ЗДАНИЕ | 1996 |
|
RU2098578C1 |
| Способ герметизации биметаллических пакетов, предназначенных для получения биметаллов прокаткой | 1955 |
|
SU105853A1 |

