ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее раскрытие относится к устройствам генерирования энергии океанской волны, в частности к устройству, которое может быть использовано в качестве герметично уплотненного буя, который активно оптимизирует его собственное движение для увеличения энергии, извлекаемой из океанских волн.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
На протяжении века было множество предложений устройств, которые генерируют электричество из движения океанских волн. Такие устройства обычно пытаются преобразовывать океанские волны в движение, которое может быть использовано для приведения в движение турбины или линейного двигателя для производства электричества, с большинством устройств, попадающих в первую категорию. Некоторые устройства непосредственно не генерируют электричество, но преобразуют механическую энергию океанских волн в другую форму механической энергии, которая может использоваться для выполнения работы.
Многие проблемы противостоят успешной промышленной эксплуатации энергии из океанских волн.
Океан является неблагоприятной средой. Океан стремится повредить любой выступающий объект, от внешне простых, как корпуса судов, до движущихся винтов. Выступающие движущиеся части наиболее восприимчивы к повреждению. Это способствовало раннему коммерческому провалу, например, волнового преобразователя Pelamis, который требовал постоянного дорогостоящего обслуживания. Недостаток прочности делает невозможным практическое генерирование энергии.
Океанские волны не являются регулярными и не обеспечивают постоянное движение. Генераторы энергии, основанные на движении, полагаются на движение, являющееся постоянным в одном направлении в течение периода времени. Океанские волны изменяют "направление" с каждой отдельной волной, так как она достигает вершин и впадин. Это обычно преодолевается путем преобразования механической потенциальной энергии в волне в другой тип энергии (например, перекачивая воду или поворачивая ротационную турбину). Преобразования энергии приводят к неэффективностям.
Швартовка часто является проблемой. Многие устройства используют постоянную швартовку или тяжелый вес в качестве "механического основания". Швартовка, которая может выдерживать использование таким образом, является дорогостоящей и сложной в установке, а также является непрактичной в глубоких водах. Отдельное "механическое основание" является дорогостоящим в перемещении и делает обслуживание устройства более дорогостоящим, ограничивая подвижность и доступность устройства.
Периодичность и амплитуда океанских волн являются стохастическими, что может приводить к низкой эффективности при генерировании энергии. Эта проблема обычно решается любым таким же способом, что и предыдущая проблема, приводя к таким же неэффективностям, или путем оптимизации для особого набора параметров океанской волны, приводя к субоптимальной эффективности.
Например, документ US 2009/0085357 А1 раскрывает систему преобразователя волновой энергии (WEC), включающую в себя оболочку, содержащую внутренний осциллятор, состоящий из реакционной массы, подвешенной к корпусу упругой пружиной параллельно с пружиной постоянного усилия. Пружина постоянного усилия обеспечивает относительно постоянное усилие (Fc), чтобы уравновесить статический вес реакционной массы и уменьшить «статическую» длину расширения упругой пружины, в то время как упругая пружина прикладывает усилие (Fes) к реакционной массе, которое пропорционально смещению x упругой пружины. Устройство отбора мощности (РТО), расположенное внутри оболочки, соединенное между корпусом и внутренним генератором, преобразует их относительное движение в электрическую энергию. Однако, упомянутое известное решение также обладает рядом недостатков, включая приведенные выше.
Ссылку на любой известный уровень техники в описании не следует понимать как признание того, или как любую форму подсказки на то, что этот известный уровень техники образует часть общих знаний в Австралии или в любой другой юрисдикции, причем можно разумно ожидать, что этот известный уровень техники может быть оценен, понят и рассмотрен как подходящий специалистами в уровне техники.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Техническая задача настоящего изобретения заключается в решении одного или нескольких приведенных выше недостатков, присущих решениям, известным из уровня техники.
Согласно первому аспекту изобретения вышеупомянутая задача решается посредством волнового генератора энергии, содержащего:
плавучий корпус, предназначенный для плавания в массе воды;
электрическую машину, расположенную в корпусе, содержащую якорь и источник поля, причем электрическая машина имеет неподвижную часть, соединенную с корпусом, и подвижную часть;
узел противовеса, который является подвижным в корпусе, содержащий подвижную часть электрической машины, и причем относительное перемещение узла противовеса и неподвижной части электрической машины генерирует электрическую энергию;
устройство накопления энергии, которое накапливает энергию, генерируемую электрической машиной;
систему управления, которая определяет двунаправленный поток энергии между устройством накопления энергии и якорем, причем энергия возвращается к электрической машине для приведения в движение узла противовеса антисимметрично движению корпуса так, что движение узла противовеса находится в противофазе с движением корпуса и имеет ту же амплитуду, что и движение корпуса.
Согласно одному варианту осуществления упомянутый волновой генератор энергии содержит устройство возвращающей силы, расположенное между корпусом и узлом противовеса, причем устройство возвращающей силы прикладывает возвращающую силу на узле противовеса, если узел перемещается в корпусе.
Согласно другому варианту осуществления упомянутого волнового генератора энергии устройство возвращающей силы содержит по меньшей мере одно из: пневматической рессоры, пневматической рессоры с обкатывающей диафрагмой, эластомерной втулки, пружины и пневматического поршня.
Согласно другому варианту осуществления упомянутый волновой генератор энергии содержит множество датчиков с возможностью обмена данными с системой управления, причем датчики обеспечивают сигналы данных, указывающие по меньшей мере одно из: положения корпуса; положения узла противовеса; скорости корпуса; скорости узла противовеса; ускорения корпуса; ускорения узла противовеса; электрического тока в фазе или фазах электрической машины; напряжения на фазе или фазах электрической машины; электрического тока, текущего через компоненты распределения энергии электрической машины; электрического тока, текущего через электрические компоненты электроники управления энергией; напряжения на компонентах распределения энергии электрической машины; напряжения на электрических компонентах электроники управления энергией; и фазы тока в фазе или фазах электрической машины.
Согласно другому варианту осуществления упомянутого волнового генератора энергии система управления содержит контур фазовой автоподстройки частоты (PLL), который действует для синхронизации фазы первого сигнала с фазой второго сигнала.
Согласно другому варианту осуществления упомянутого волнового генератора энергии входной сигнал для PLL выбирается из группы, состоящей из: разницы между положением корпуса и поверхностью океана; разницы между скоростью корпуса и скоростью узла противовеса; и разницы между ускорением корпуса и ускорением узла противовеса.
Согласно другому варианту осуществления упомянутого волнового генератора энергии система управления содержит оптимальный алгоритм управления, который действует для возвращения и отбора мощности от электрической машины так, что узел противовеса и корпус перемещаются антисимметрично резонирующим образом.
Согласно другому варианту осуществления упомянутого волнового генератора энергии якорь содержит три фазы электрической машины.
Согласно другому варианту осуществления упомянутого волнового генератора энергии каждая фаза связана с контроллером полного моста, который позволяет двунаправленный поток между фазами и устройством накопления энергии.
Согласно другому варианту осуществления упомянутый волновой генератор энергии содержит схему отбора мощности, которая выводит генерируемую электрическую энергию из волнового генератора энергии.
Согласно другому варианту осуществления упомянутого волнового генератора энергии схема отбора мощности содержит кабель, который действует в качестве троса для волнового генератора энергии.
Согласно другому варианту осуществления упомянутый волновой генератор энергии содержит линейные подшипники, выровненные с вертикальной осью корпуса, причем узел противовеса перемещается вдоль линейных подшипников в корпусе.
Согласно другому варианту осуществления упомянутого волнового генератора энергии корпус содержит вытянутый цилиндр.
Согласно другому варианту осуществления упомянутого волнового генератора энергии вытянутый цилиндр содержит нижний участок, по существу вмещающий узел противовеса, и верхний участок, вмещающий неподвижную часть электрической машины, причем диаметр верхнего участка больше диаметра нижнего участка.
Согласно другому варианту осуществления упомянутого волнового генератора энергии корпус является коническим.
Согласно другому варианту осуществления упомянутого волнового генератора энергии корпус содержит верхний конический участок, который сужается к промежуточной шейке, и нижний конический участок, который расширяется от промежуточной шейки.
Согласно другому варианту осуществления упомянутого волнового генератора энергии система управления определяет двунаправленный поток энергии в зависимости от периода, кратного периоду волн в массе воды.
Согласно другому варианту осуществления упомянутого волнового генератора энергии по меньшей мере неподвижная часть электрической машины и узел противовеса расположены во втором корпусе, размещенном в плавучем корпусе, и являются вращаемыми относительно плавучего корпуса для поддержания по существу вертикальной ориентации второго корпуса.
Согласно другому варианту осуществления упомянутый волновой генератор энергии содержит средство тормоза, которое ограничивает движение узла противовеса относительно корпуса.
Согласно другому варианту осуществления упомянутый волновой генератор энергии содержит средство приведения в действие средства тормоза, если движение генератора превышает заданное пороговое значение, или на основе сигнала от внешнего источника.
Согласно другому варианту осуществления упомянутого волнового генератора энергии неподвижная часть электрической машины содержит якорь, а подвижная часть содержит источник поля.
Согласно другому варианту осуществления упомянутого волнового генератора энергии неподвижная часть электрической машины содержит источник поля, а подвижная часть содержит якорь.
Согласно второму аспекту изобретения обеспечен способ генерирования электрической энергии, содержащий этапы, на которых:
a) развертывают волновой генератор энергии в массе воды, причем генератор содержит:
i) плавучий корпус;
ii) электрическую машину, расположенную в корпусе, содержащую якорь и источник поля, причем электрическая машина имеет неподвижную часть, соединенную с корпусом, и подвижную часть;
iii) узел противовеса, который является подвижным в корпусе, содержащий подвижную часть электрической машины, и причем относительное перемещение узла противовеса и неподвижной части электрической машины генерирует электрическую энергию; и
iv) устройство накопления энергии, которое накапливает энергию, генерируемую электрической машиной;
b) определяют двунаправленный поток энергии между устройством накопления энергии и якорем, и
c) возвращают энергию к электрической машине на основе упомянутого определяемого потока энергии, чтобы приводить в движение узел противовеса антисимметрично движению корпуса так, что движение узла противовеса находится в противофазе с движением корпуса и имеет ту же амплитуду, что и движение корпуса.
Таким образом, настоящее изобретение обеспечивает эффективное и надежное устройство и способ генерирования электрической энергии.
Как используется здесь, за исключением того, когда контекст требует иного, выражение "содержать" и варианты выражения, например, "содержащий", "содержит" и "содержащийся", не предназначены для исключения дополнительных добавок, компонентов, целых элементов или этапов.
Дополнительные аспекты настоящего изобретения и дополнительные варианты осуществления аспектов, описанных в предыдущих абзацах, станут очевидными из следующего далее описания, приведенного путем примера и со ссылкой на сопровождающие чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
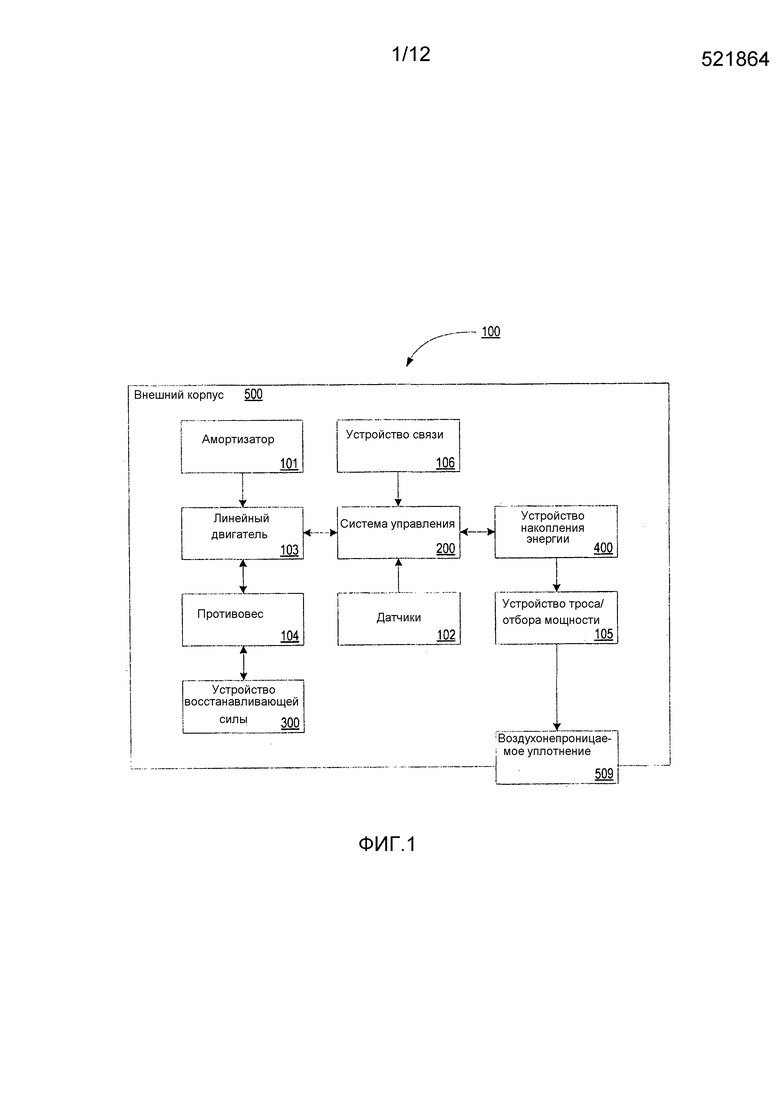
Фиг. 1 показывает блок-схему волнового генератора энергии.
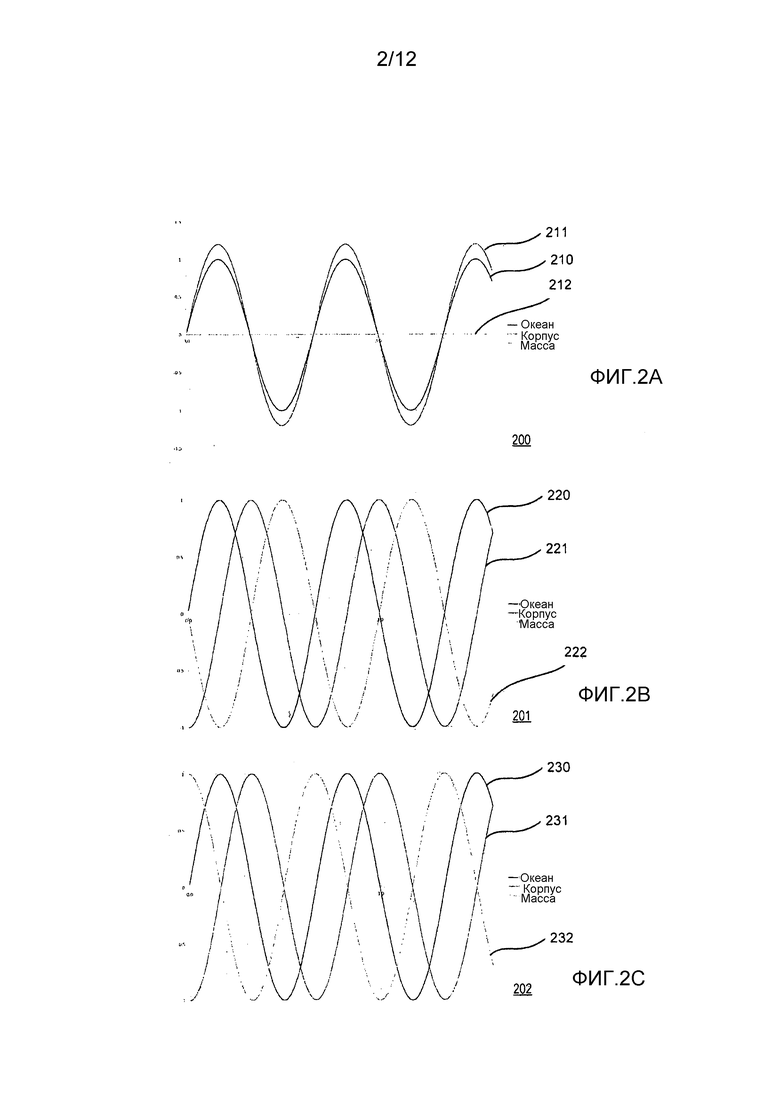
Фиг. 2А-2С показывают графики идеализированной характеристики волнового генератора энергии на Фиг. 1 по сравнению с характеристикой альтернативных конструкций.
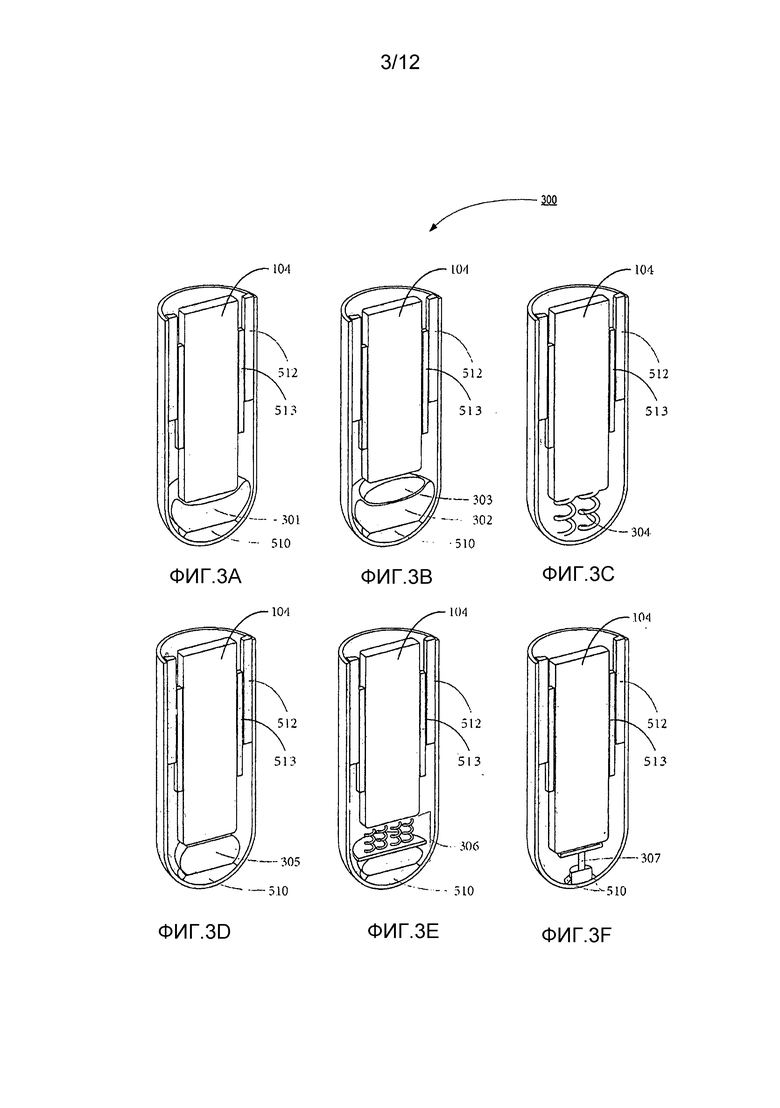
Фиг. 3A-3F показывают схематические изображения компонентов восстановления силы, используемых в генераторе на Фиг. 1.
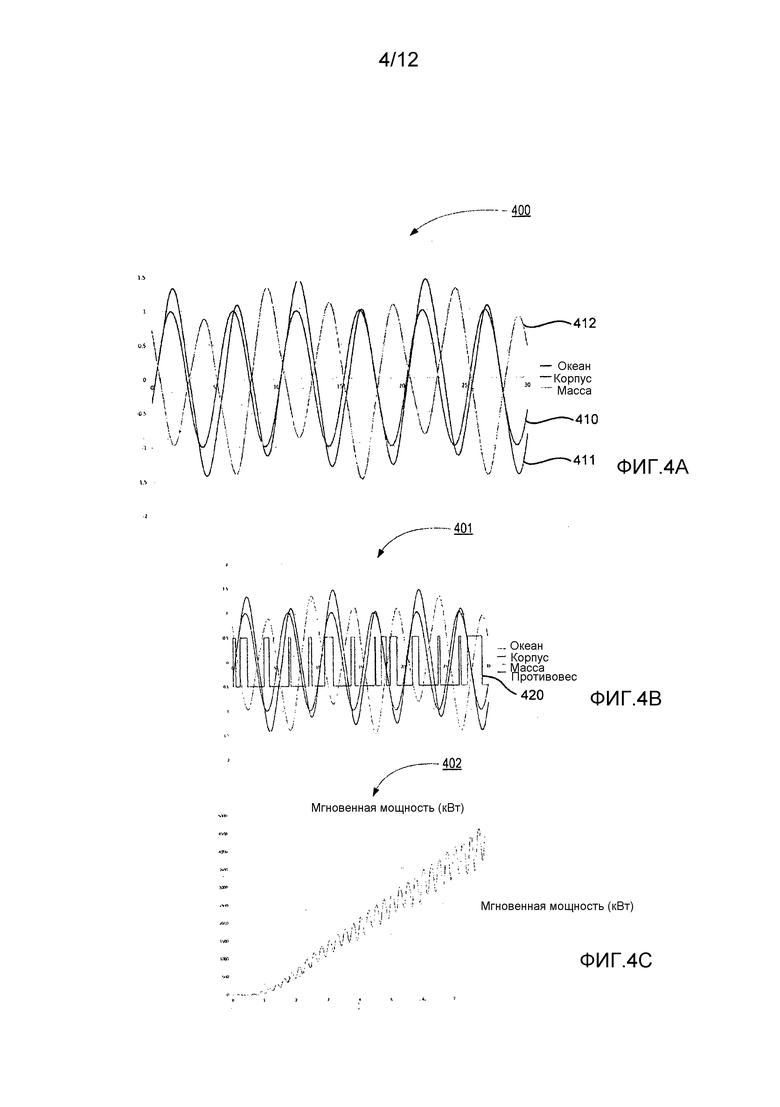
Фиг. 4А показывает графики моделируемого движения идеализированного варианта генератора на Фиг. 1.
Фиг. 4В показывает пример управляющего сигнала для движения на Фиг. 4А.
Фиг. 4С показывает пример энергии, генерируемой в волновом генераторе энергии.
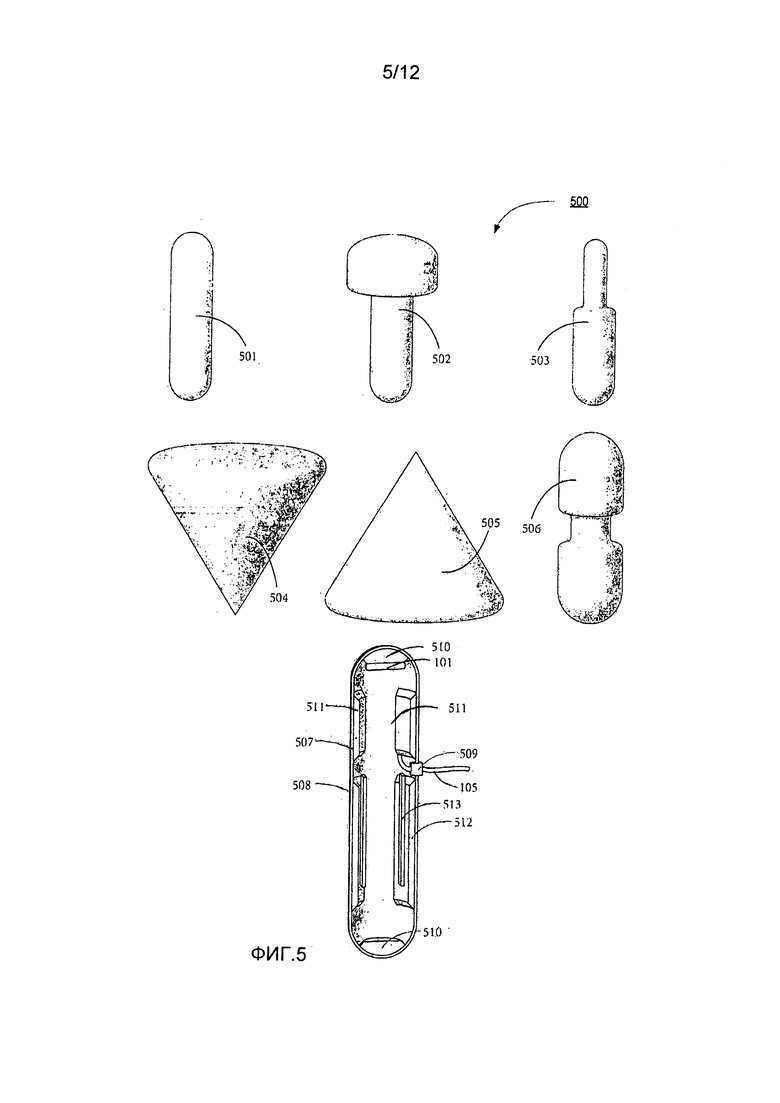
Фиг. 5 показывает схемы различных корпусов для волнового генератора энергии и компоненты, которые объединены с корпусом.
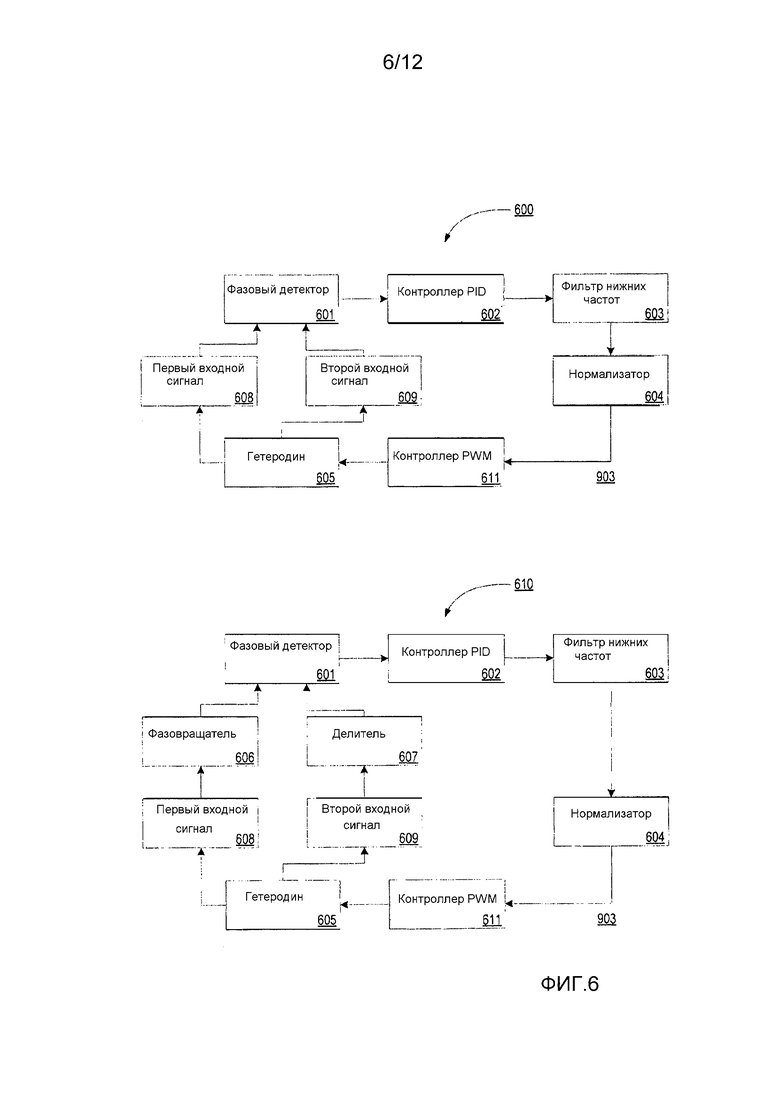
Фиг. 6 показывает блок-схемы контроллеров контуров фазовой автоподстройки частоты для использования в волновом генераторе энергии.
Фиг. 7 показывает схему варианта осуществления волнового генератора энергии.
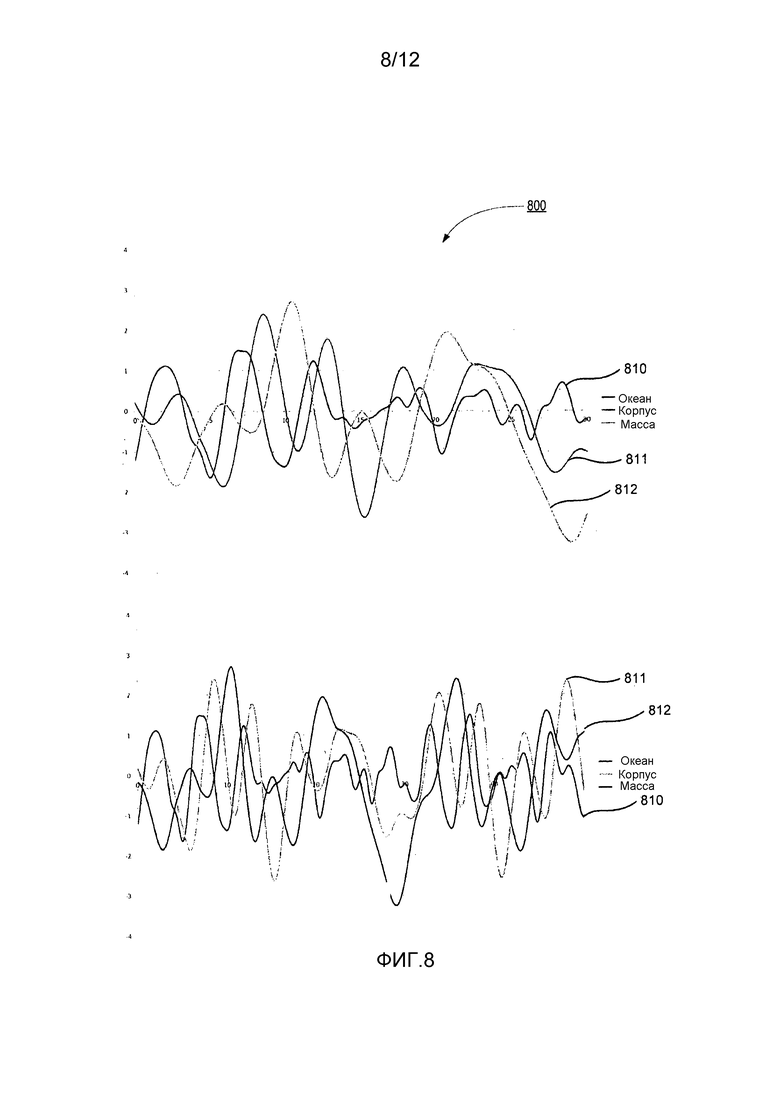
Фиг. 8 показывает графики моделируемого движения волнового генератора энергии, включающего электрическую систему и работающего в моделируемых условиях океана.
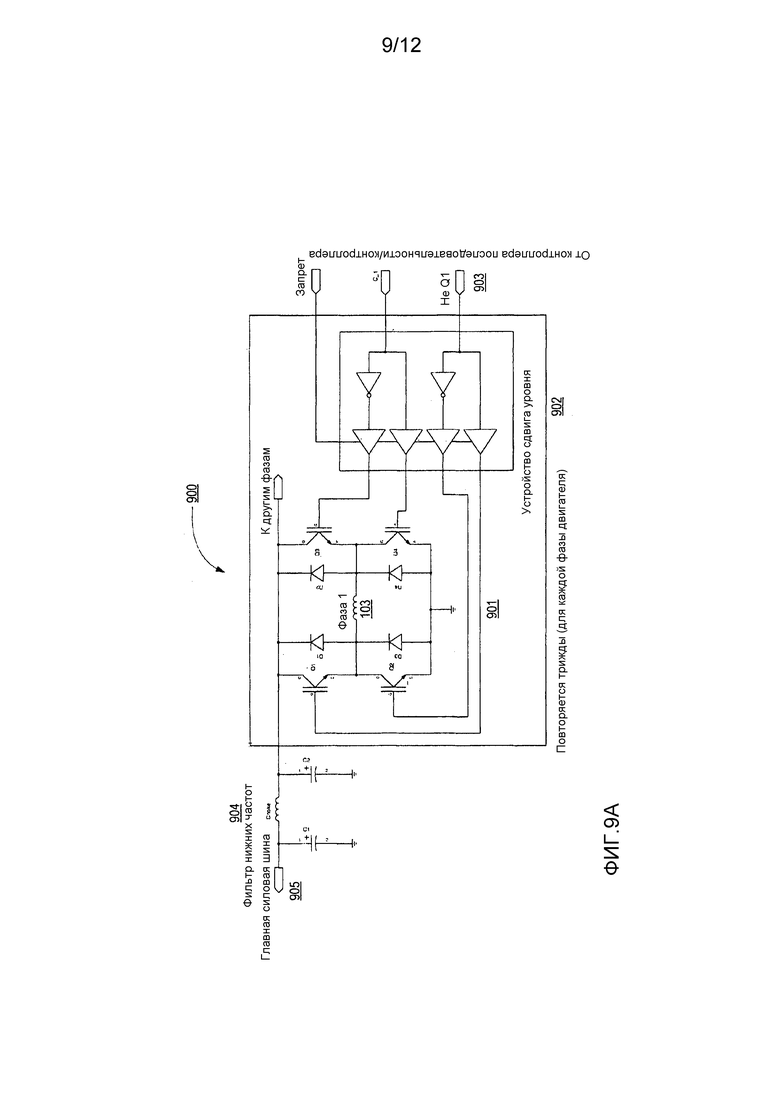
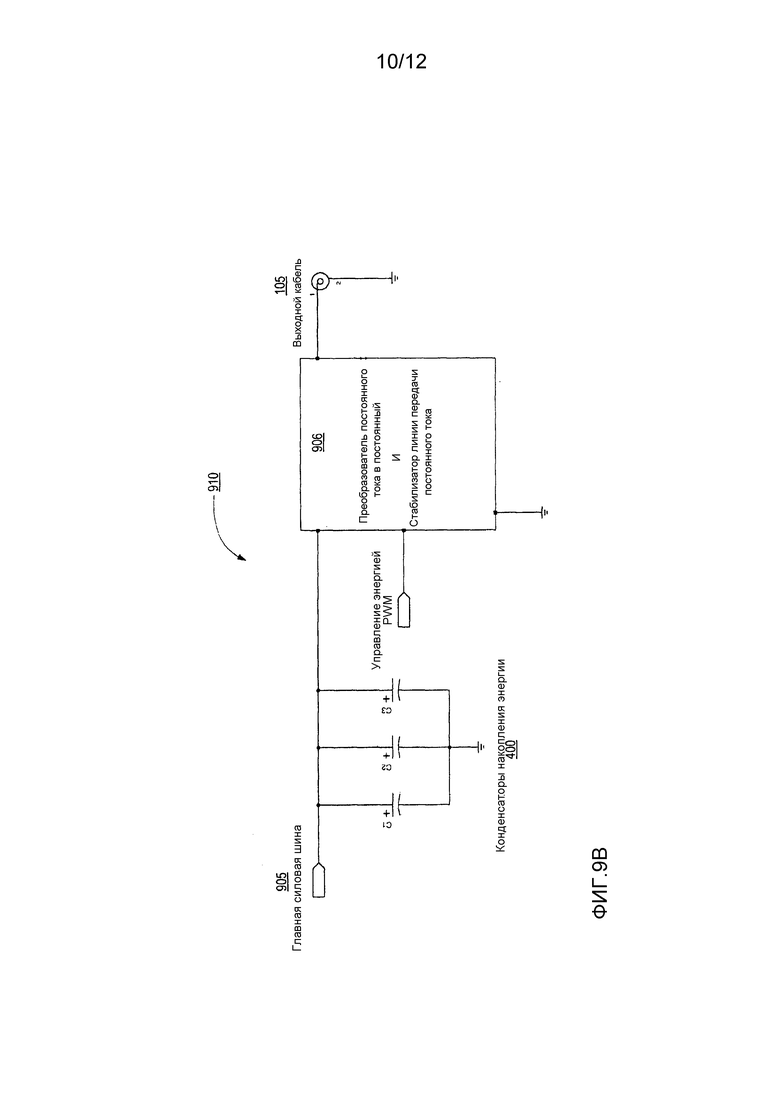
Фиг. 9 показывает варианты осуществления электрической системы волнового генератора энергии.
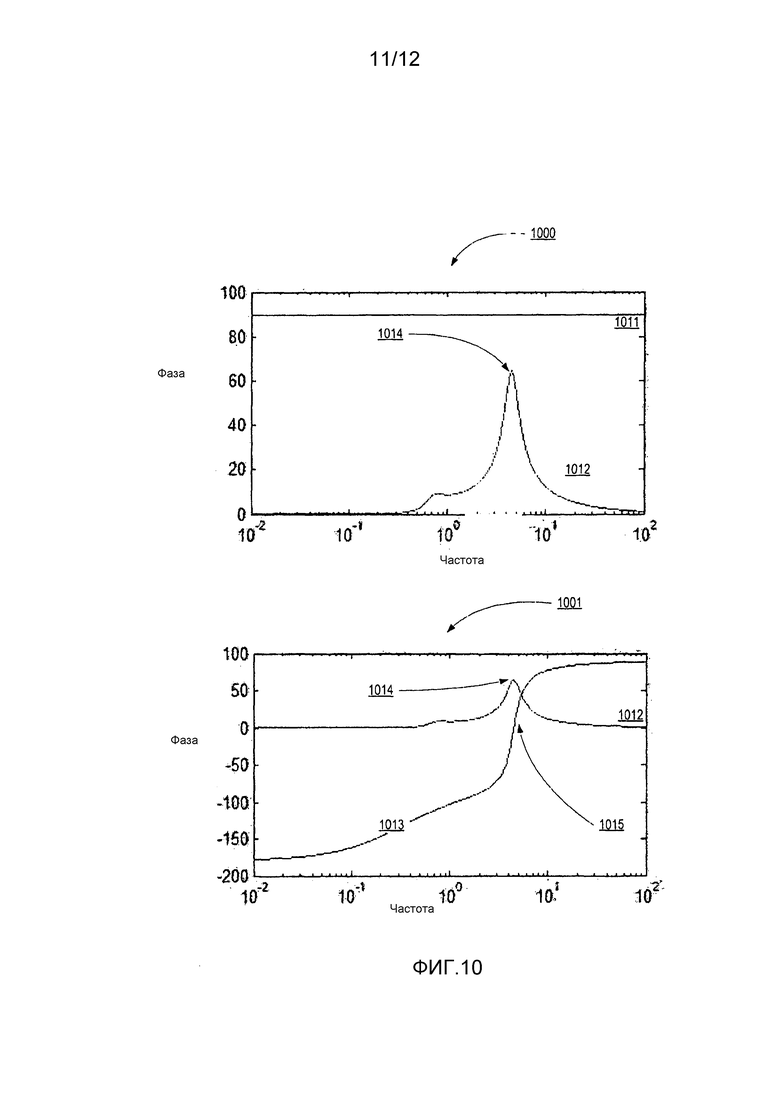
Фиг. 10 показывает диаграммы Боде, иллюстрирующие действие различных управляющих сигналов для варианта осуществления устройства.
Фиг. 11 представляет собой схематическую блок-схему, иллюстрирующую, как усилия и сигналы обмениваются между компонентами волнового генератора энергии.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Фиг. 1 показывает устройство 100 генерирования энергии с электрической машиной 103, которая работает в качестве линейного двигателя или генератора, установленного внутри герметично уплотненного корпуса 500 буя, который плавает в массе воды, например, в океане. Источник поля линейного двигателя/генератора 103 соединен с противовесом 104, который при использовании перемещается вдоль вертикальной оси буя. Как описано более подробно ниже, противовес 104 расположен на устройстве 300, которое обеспечивает восстанавливающую (возвращающую) силу в ответ на движение противовеса. Это конфигурация устраняет необходимость в механическом основании, позволяя и противовесу 104 и внешнему корпусу 500 свободно перемещаться во время работы.
Компоненты устройства 100 содержатся в герметично уплотненном внешнем корпусе 500, хотя устройство 105 отбора мощности должно проникать в этот корпус, не нарушая уплотнение. Такая конфигурация увеличивает устойчивость устройства 100 к нанесению ущерба окружающей среде, уменьшая требования к обслуживанию и увеличивая эксплуатационный срок службы. Это может быть достигнуто, используя воздухонепроницаемое уплотнение 509, например, сквозное гидравлическое уплотнение. Кабель, используемый для устройства 105 отбора мощности, может быть линией передачи с оболочкой, оптимизированной для подводной передачи, например, HDVC Plus Siemens. Могут быть выбраны кабели, которые могут служить в качестве троса для устройства 100. Альтернативно кабель может быть интегрирован в кабель-трос, прикрепленный к внешнему корпусу 500. Внешний корпус 500 может иметь противообрастающее покрытие.
Устройство 100 включает в себя амортизатор 101, который ограничивает источник поля линейного двигателя и противовес 104 от сильного воздействия и возможно повреждения верхней части корпуса 500 при сильных волнениях. Амортизатор 101 может быть эластомерным вкладышем, пневматической рессорой или подобным поглощающим устройством.
Линейный двигатель 103 может быть синхронным или асинхронным двигателем. Например, линейный двигатель 103 может иметь источник магнитного поля и обмотку якоря с тремя фазами обмотки, повторяющейся вдоль длины якоря. Этот двигатель 103 оптимизирован для непрерывной, эффективной работы на малых скоростях. Это может, например, повлечь увеличение используемых обмоток и использование асинхронного двигателя, где статор не содержит железо (так как высоко индуцированные магнитные поля могут притягивать части линейного двигателя, создавая напряженность в механических частях двигателя).
Масса противовеса 104 выбирается для оптимального генерирования энергии для ожидаемого диапазона периодов волн, которому приведенная конфигурация устройства, как ожидается, будет подвержена. В одной конструкции противовес 104 представляет собой тяжелый металлический цилиндр. Альтернативные конструкции имеют другие материалы, плотности которых влияют на их размер и размеры устройства. Например, железобетон может обеспечивать соответствующую плотность для предполагаемого вертикального размера устройства, или используются металлы с большей плотностью, чтобы уменьшать вертикальный размер, когда требуется. Противовес предпочтительно является немагнитным, так как это будет мешать линейному двигателю над ним.
Система 200 управления сообщается с линейным двигателем 103, а также с устройством 400 накопления энергии, например, батареей конденсаторов, размещенных в корпусе 500. Система 200 управления содействует передаче энергии к и от устройства 400 накопления энергии и электрической машины 103. Устройство 105 отбора мощности выводит мощность из устройства 400 накопления энергии с помощью воздухонепроницаемого уплотнения 509. Устройство 400 накопления энергии может быть объединено с противовесом 104, в этом случае устройство накопления энергии соединено с инвертором гибким кабелем.
Датчики 102 измеряют положение источника поля линейного двигателя/генератора 103 относительно внешнего корпуса 500 и другие параметры (например, высоту устройства над океанскими волнами). Эта информация используется объединенной системой 102 управления и регулирования энергии для возврата энергии в систему, приводя движение источника поля и противовеса в антисимметричный резонанс с корпусом. Это рассматривается, чтобы увеличить энергию, генерируемую устройством 100.
Устройство 100 также может иметь устройство 106 связи, которое может быть блоком беспроводной связи, радиопередатчиком ближнего действия или подобным устройством, которое используется для передачи информации об устройстве 100 к ресиверу (не показан). Устройство 106 связи позволяет устройству 100 принимать сигналы, которые могут, например, использоваться, чтобы заставлять устройство блокировать противовес 104 в положении для удобства транспортировки или для обновления программируемых элементов системы управления. Устройство связи также может работать по линии, например, оптическому волокну, которая является частью конструкции 105 отбора мощности/троса.
В альтернативной конфигурации якорь электрической машины 103 может быть соединен с противовесом 104 и свободно перемещаться в корпусе, пока источник поля неподвижен относительно корпуса. В этом случае гибкий кабель может соединять подвижный якорь с электрической системой.
Устройство 100 может иметь систему для крепления узла противовеса в рабочем положении, подобную тормозу лифта. Это используется для уменьшения амплитуды движения устройства в том случае, когда устройство требует обслуживания, или в условиях океана слишком сильное волнение для штатного режима работы. Могут быть использованы дополнительные микроконтроллеры, которые могут быть соединены с устройством(ами) 106 связи или регулируются отдельными алгоритмами, которые используют сигналы от датчиков 102 в качестве входных данных (например, чтобы определять, когда море становится слишком волнительным). Таким образом, например, перед обслуживанием устройства сигнал может быть отправлен на устройство 106 связи для того, чтобы зафиксировать или удерживать противовес 104.
Фиг. 2А-С показывают результаты моделирования, сравнивающие характеристику устройства 100 с работой других подходов.
Фиг. 2А показывает движение 211 плавучего корпуса, перемещающегося в резонансе с периодической океанской волной 210 (смоделированной в виде нормализованной синусоиды с иллюстративными целями). Относительная скорость между этим корпусом и неподвижным механическим основанием 212 может быть использована в традиционных устройствах, чтобы генерировать энергию с помощью линейного двигателя. Средняя скорость корпуса пропорциональна величине движения 211 корпуса, которая незначительно больше, чем величина океанских волн 210 (его величина увеличивается его резонансным движением).
Фиг. 2В показывает движение 221 свободно плавающего плавучего корпуса со свободной массой, соединенной с корпусом пружиной. Движение свободной массы показано в виде кривой 222, и как и ранее океанская волна смоделирована в виде нормализованной синусоиды 220. Фаза движения корпуса 221 сдвинута на девяносто градусов относительно океана 220; в свою очередь, фаза движения свободной массы 222 сдвинута на девяносто градусов относительно движения корпуса 221. Относительная скорость между корпусом и массой пропорциональна величине движения корпуса, которая приблизительно равна величине движения океанских волн в идеальных условиях. Это генерирует меньше энергии, чем приводная резонансная система на Фиг. 2С.
Фиг. 2С иллюстрирует работу устройства 100 при условии входных данных нормализованной синусоидальной океанской волны 230. Фиг. 2С показывает движение 231 свободно плавающего плавучего корпуса (например, корпуса 500) с движением 232 свободной массы, приводимой в движение в антисимметричном резонансе с движением корпуса. В этой конструкции относительная скорость между корпусом и массой пропорциональна удвоенной величине движения корпуса, которая приблизительно равна величине движения океанских волн в идеальных условиях. Это конструкция генерирует больше энергии, чем любая из систем, проиллюстрированных на Фиг. 2А и 2В. Свободная масса в этом примере соответствует системе, включающей противовес 104 и источник поля линейного двигателя 103.
На практике величина движения корпуса 500 увеличивается с помощью систем управления, описанных здесь, дополнительно увеличивающих выходную мощность устройства 100.
УСТРОЙСТВА ВОССТАНАВЛИВАЮЩЕЙ СИЛЫ
Источник поля линейного двигателя 103 прикреплен к противовесу 104, и этот узел находится под воздействием устройства 300 восстанавливающей силы. Фиг. 3А показывает конструкцию, в которой устройством восстанавливающей силы является пневматическая рессора 301 с обкатывающей диафрагмой, например, пневматическая рессора с обкатывающей диафрагмой Goodyear®. Эта пневматическая рессора 301 соединена с опорой 510 на основании внешнего корпуса и с основанием противовеса 104. Противовес перемещается в корпусе, используя линейные подшипники, с помощью подвижного компонента 513 и неподвижного компонента 512.
Фиг. 3В показывает конструкцию, в которой противовес 104 опирается на пневматическую рессору 303, которая, в свою очередь, опирается на эластомерный вкладыш 302. Вкладыш расположен на опоре 510.
Фиг. 3С показывает конструкцию, в которой противовес 104 соединен с корпусом пружинами 304, которые прикладывают восстанавливающую силу к противовесу 104. Фиг. 3D показывает конструкцию, в которой противовес опирается на эластомерный вкладыш 305, расположенный на опоре 510. Альтернативно, как показано на Фиг. 3F, противовес может поддерживаться пневматическим поршнем 307, соединенным с корпусом посредством опоры 510.
Устройство 300 восстанавливающей силы может включать совокупность вышеупомянутых элементов. Например, Фиг. 3Е показывает устройство восстанавливающей силы, имеющее пружины 304 и эластомерный вкладыш 305, соединенные связями 306.
Пневматическая рессора с обкатывающей диафрагмой имеет несколько полезных признаков, включающих:
1. длинный ход;
2. постоянный отклик в течение длинного хода; и
3. небольшую скорость демпфирования.
Эти признаки содействуют в поддержке соответствующей характеристики системой в периоде океанской волны, который составляет порядка нескольких секунд и больше периода большинства применений пневматической рессоры. Устройством восстанавливающей силы также может быть обеспечено противодействующее движение вверх узла противовеса.
Моделируемая работа устройства.
Система 102 управления возвращает энергию от устройства 400 накопления энергии к линейному двигателю 103, чтобы приводить источник поля и противовес 104 в антисимметричный резонанс с корпусом. Это проиллюстрировано в результатах моделирования на Фиг. 4А-4С. Фиг. 4А показывает график с временем на оси x, при котором устройство работает в океане, смоделированном в виде нормализованной синусоидальной волны 410. Так как система управления изменяет отбор мощности и возвращение, корпус и масса приводятся в антисимметричный резонанс. Кривая 412 показывает движение массы (т.е. противовеса и источника поля линейного двигателя 103), и кривая 411 показывает движение корпуса 500.
Фиг. 4В показывает примерный график управляющих сигналов 420, наложенный на диаграммы на Фиг. 4А. Управляющий сигнал 420 представляет собой последовательность бинарных импульсов, которые определяют, когда энергия отводится от или возвращается к линейному двигателю для приведения в движение свободной массы. Эти импульсы нормализуются на величину, кратную восстанавливающей силе, действующей на свободной массе, измеряемой датчиками 102. Это обеспечивает, что возвращаемая или отводимая энергия пропорциональна текущему движению системы. Восстанавливающая сила может быть измерена непосредственно или может быть оценена на основе других измерений, например, ускорения известной массы.
Фиг. 4С показывает энергию 402, генерируемую системой 100 в течение 80-секундного прогона моделирования под воздействием синусоидальной волны. Провалы в мощности соответствуют мощности, возвращаемой к системе, для приведения ее в антисимметричный резонанс и поддержания этого антисимметричного резонанса.
КОНСТРУКЦИИ КОРПУСА И КОМПОНЕНТЫ
Большинство компонентов устройства 100 заключены в герметично уплотненном внешнем корпусе 500. Корпус изготовлен из долговечного материала, пригодного для применения в океане. Как проиллюстрировано на Фиг. 5, устройство использует стальной корпус 507 с целью долговечности с покрытием 508 для борьбы с обрастанием. Возможны многие другие совокупности материалов с должным учетом долговечности и предотвращения обрастания независимо от выбора материала. Конструктивным соображением для противообрастающего покрытия является его долговечность, уменьшая требование в обслуживании вне воды.
Внутренняя область корпуса 507 выложена цилиндрическими линейными подшипниками, например, профильными рельсовыми направляющими SKF, имеющими подвижный компонент 513 и компонент 512, который неподвижен относительно корпуса. Подшипники выбираются с возможностью обеспечения низкого сопротивления движению системы источника поля/противовеса, предотвращая свободную массу от горизонтального перемещения. Линейный подшипник 512, 513 оптимизирован для низкого трения и массы противовеса.
Опора 510 расположена в основании корпуса 507 для поддержки устройства 300 восстанавливающей силы. Другая опора 510 расположена на верхней части внутренней области корпуса для поддержки амортизатора 101. Другие признаки корпуса включают сквозное гидравлическое уплотнение 509, соединяющее устройство 105 отбора мощности с внутренним отделением устройства, и опоры 511 для якоря линейного двигателя 103 и устройства 400 накопления энергии.
Фиг. 5 показывает диапазон различных форм для корпуса. Корпус 501 обычно является цилиндрическим с закругленными верхней и нижней частями. Корпус 502 является цилиндрическим и имеет более широкую верхнюю секцию для вмещения якоря линейного двигателя и устройства накопления энергии. Альтернативные варианты осуществления могут иметь другие формы, например:
Корпус 503 является цилиндрическим с более широкой нижней секцией и соответственно более коротким противовесом (в качестве части системы противовеса-источника поля).
Корпус 504 является коническим с более узким концом конуса на нижнем конце корпуса. Корпус 505 является коническим с узким концом конуса на верхнем конце корпуса. Нецилиндрические формы могут оказывать влияние на резонансный отклик буя на волны. Биконический буй 506 может быть использован для удвоения естественной резонансной частоты буя при приведении в движение океаном. Буй 506 имеет большой верхний участок, который сужается к средней части, а далее расширяется к более широкому нижнему участку.
Выбор формы корпуса обусловлен проблемами эффективности и долговечности.
СИСТЕМА 200 УПРАВЛЕНИЯ
Фиг. 6 показывает блок-схему 600 системы управления, основанной на конфигурации контура фазовой автоподстройки частоты (PLL). Система 600 управления включает фазовый детектор 601, осуществляемый в настоящем варианте осуществления в виде компаратора нулевого уровня различных управляющих сигналов, например, первого входного сигнала 608 и второго входного сигнала 609. В одной конструкции первый входной сигнал 608 представляет собой разницу относительного положения между корпусом устройства и океаном, и второй входной сигнал 609 представляет собой относительную скорость корпуса и внутренней свободной массы. Использование этих сигналов дополнительно описано ниже. Выходной сигнал фазового детектора 601 подается в пропорционально-интегрально-дифференциальный (PID) контроллер 602 (с механизмом предотвращения насыщения). Выходной сигнал контроллера PID проходит через фильтр 603 нижних частот для обеспечения того, что только сигналы, имеющие приблизительную фазу океанских волн, были обнаружены. Отфильтрованный сигнал нормализуется нормализатором 604 с помощью измеренной (или предполагаемой) восстанавливающей силы, подаваемой устройством восстановления силы, прикрепленным к свободной массе. Выходной сигнал 903 нормализатора подается в контроллер 611 гетеродина 605, который является линейным двигателем 103 в этом варианте осуществления. Этот контроллер 611 в одной конструкции использует широтно-импульсную модуляцию (PWM) для добавления энергии от электрической системы устройства обратно к линейному двигателю или для увеличения демпфирования на двигателе для перемещения энергии от двигателя к электрической системе. Двунаправленный поток энергии управляется с помощью контроллера полного моста, как обсуждалось в другом документе.
Первый и второй входные сигналы 608, 609 являются измеряемыми или вычисляемыми сигналами, указывающими движение волнового генератора энергии. Как обсуждается ниже, имеются различные входные сигналы, которые могут быть использованы в контроллере фазовой автоподстройки частоты.
В других конструкциях контроллер 610 включает фазовращатель 606, который используется для преобразования входного сигнала. В примере на Фиг. 6 фазовращатель 606 применяет фазовый сдвиг к первому входному сигналу 608 до того, как сигнал будет принят фазовым детектором 601. Фазовращатель 606 используется при синхронизации сигнала с приведенной фазой, которая сдвинута на определенный параметр. Такой фазовый сдвиг известен из традиционных цепей PLL. Система 610 управления также может включать делитель 607 на одном или более входных сигналах, которые могут быть сдвинуты по фазе, чтобы влиять на скорость синхронизации. В примере 610 на Фиг. 6 второй входной сигнал обрабатывается делителем 607 до того, как он будет принят фазовым детектором 601.
Выходные сигналы 903 системы управления используются для управления элементами электрической системы, показанной на Фиг. 9, с помощью широтно-импульсной модуляции или подобного способа.
Система управления осуществлена, используя интегральные схемы (IC) или микроконтроллер. Система управления находится в обмене данными с датчиками 102 для обеспечения управляющих сигналов. Как описано здесь, устройство 400 накопления энергии соединено между контроллером полного моста линейного двигателя 103 и системой 105 отбора мощности.
Примером контура фазовой автоподстройки частоты (PLL), который может использоваться в контроллере, является МС14046В ON Semiconductor. Интегральная схема (IC) PLL обычно обеспечивает фазовый компаратор, истоковый повторитель и генератор, управляемый напряжением. Внешний фильтр нижних частот (например, LTC1062CJ8-ND Linear Technology) может быть обеспечен, и интегральная схема аналогового или цифрового делителя/умножителя может быть использована в работе контроллера 610, например, AD632AHZ-ND Analog Devices Inc.
Устройство 100 может использовать программное исполнение контура фазовой автоподстройки частоты, находящееся на микроконтроллере, например, контроллере Arduino или Microchip, хотя альтернативные варианты осуществления могут использовать микрокомпьютер, цифровой сигнальный процессор (например, С6713 Texas Instrument) или другое подобным образом совместимое устройство. При осуществлении PLL в программном обеспечении все компоненты контроллера 600, 610 представляют собой модули программного обеспечения, передающие входные и выходные данные между собой.
Альтернативные варианты осуществления могут использовать другие системы управления для достижения такого же функционального эффекта. Например, может быть использован микропроцессор, использующий сигналы от датчиков 102, обеспечивая оптимальное управление, возвращая условие, которое используется контроллером для возврата силы или увеличения демпфирования на линейном двигателе для того, чтобы поддерживать антисимметричный резонанс между корпусом и массой. Это может быть достигнуто путем изменения свойств, например, напряжения на различных фазах электрической системы (которая включает линейный двигатель и силовую электронику, смотри Фиг. 9). В такой системе управления контроллер может, например, действовать для увеличения целевой функции, которая определяет антисимметричный резонанс. Целевая функция может зависеть от полной кинетической энергии системы, и, таким образом, действие по увеличению целевой функции может увеличивать полную кинетическую энергию. Целевая функция может зависеть от полной электрической энергии, доступной для системы, и, таким образом, действие по увеличению целевой функции может увеличивать полную электрическую энергию, доступную в системе.
Оптимальное управление (или другая система управления) может быть осуществлено на аппаратном обеспечении, физически не представленном в корпусе устройства, так, что сигналы передаются от станции обработки, физически отделенной от устройства, которое осуществляет это управление. Этот контроллер все же рассматривается для образования части системы устройства.
ДАТЧИКИ
Датчики 102 могут включать акселерометр (например, ADXL330 Analog Devices) и датчик положения. Для последнего устройство 100 может использовать квадратурный датчик положения (например, Industrial Encoder BEI Sensor), который используется со многими линейными двигателями для измерения положения. Потенциометр, индуктивный датчик положения, датчик на эффекте Холла или подобное устройство также могут быть использованы.
Скорость и относительное положение являются основными измерениями, используемыми в контуре 600, 610 управления. Другие датчики могут быть включены в устройстве 100 для облегчения его работы, например, датчики давления, датчики влажности, температурные датчики, вольтметры и амперметры. Эти дополнительные датчики могут быть использованы для определения того, если устройство 100 нуждается в обслуживании, и в общем будут использоваться маломощные датчики. Такие дополнительное датчики добавляют эксплуатационную устойчивость.
Датчики также могут быть обеспечены с возможностью измерения ускорения корпуса или ускорения узла противовеса. Дополнительное измерение может включать электрический ток в фазе или фазах электрической машины; напряжение на фазе или фазах электрической машины; электрический ток, текущий через компоненты распределения энергии электрической машины; электрический ток, текущий через электрические компоненты электроники управления энергией; напряжение на компонентах распределения энергии электрической машины; напряжение на электрических компонентах электроники управления энергией; и фазу тока в фазе или фазах электрической машины.
ЭЛЕКТРИЧЕСКАЯ СИСТЕМА
Фиг. 9А и 9В показывают пример элементов электрической системы устройства. Фиг. 9А показывает контроллер 901 полного моста и устройство 902 сдвига уровня, связанное с одной фазой линейного двигателя 103. Подобные контроллер моста и устройство сдвига уровня обеспечены для каждой из других двух фаз. Бинарный сигнал 903 является входным сигналом от системы 200 управления (т.е. сигналы Q1 и "не Q1"). Сигнал 903 обрабатывается с помощью устройства 902 сдвига уровня для совместимости с контроллером 901 полного моста для первой фазы. Сигнал определяет, отбирается ли энергия от фазы к главной силовой шине 905, либо энергия возвращается к фазе линейного двигателя от главной силовой шины. LC фильтр 904 нижних частот установлен на главной силовой шине 905. Главная силовая шина может быть медным стержнем.
Фиг. 9 В показывает пример системы накопления энергии и отбора мощности. Система 400 накопления энергии может быть батареей конденсаторов (например, C1, С2 и С3), соединенных с главной силовой шиной 905. Эта система соединена с инвертором 906 и кабелем 105 отбора мощности, соединенным с внешней стороной корпуса через воздухонепроницаемое уплотнение 509. Он может быть объединен с тросом 105. Также может быть непосредственное соединение между накопителем энергии системы управления и внешней стороной корпуса без промежуточного инвертора. Инвертор принимает управляющие сигналы 903 от системы управления для содействия передаче энергии, получаемой от главной силовой шины.
Управляющие сигналы для контура фазовой автоподстройки частоты.
Как показано на Фиг. 6, система управления волнового генератора энергии возвращает энергию к линейному двигателю так, чтобы соответствовать фазе указанных входных сигналов. В одной конструкции системы управления основаны на адаптации контроллера PLL для работы на низких частотах например, тех, которые обнаруживаются в океанских волнах. Сравнение двух сигналов, определяемых с помощью анализа системы (получаемых от датчиков 102 в или на корпусе устройства) в фазовом детекторе 601, дает сигнал, используемый PLL, чтобы определять, когда возвращать энергию в систему. Этот сигнал нормализуется силой, вызываемой рессорой 300, соединенной с корпусом и свободной массой, для обеспечения того, что соответствующее количество энергии возвращается в систему.
Любой сигнал, чья функция передачи частоты/фазы имеет точку перегиба, где величина относительной скорости между корпусом и свободной массой достигает максимума, является пригодным для синхронизации. Причина состоит в том, что точка перегиба соответствует "фазовому ускорению" (вторая производная фазы по частоте) от нуля, т.е. синхронизированному сигналу. Система 600, 610 синхронизации стремится приводить фазовое ускорение к синхронизированному состоянию с нуль-фазовым ускорением; это выбирается для соответствия максимальной относительной скорости между корпусом и массой, так как максимум соответствует антисимметричному резонансу между корпусом и массой.
Примерами сигналов, которые могут использоваться в PLL 600, 610 являются:
a) разница между положением корпуса и океаном (которая может быть измерена емкостным или подобным датчиком, расположенным на корпусе);
b) разница между скоростью корпуса и свободной массы (получаемая с помощью емкостного датчика, датчика с эффектом Холла или датчика потенциометра в корпусе); и
c) разница между ускорением корпуса и ускорением узла противовеса.
Это разница между этими сигналами, которые используются для синхронизации системы, используя детектор перехода через нуль.
Сигналы выбираются для простоты, посредством которой они могут быть обнаружены простыми датчиками, чтобы уменьшать возможность ошибки или отказа оборудования во время работы устройства. Некоторые сигналы, производимые датчиками могут быть подходящими для непосредственного использования, а другим может потребоваться подача через промежуточные процессоры, чтобы быть пригодными (например, фазовращатели).
Линейный анализ простой приводной, демпфируемой, двухрессорной, двухмассовой системы был использован для определения сигналов для использования системой управления. В этом анализе рессоры соответствуют плавучести корпуса и устройству восстанавливающей силы между корпусом и свободной массой, и массы представляют собой корпус и свободную массу. Фазовые/частотные диаграммы Боде были получены из линейного анализа, сравнивающего частотную характеристику отдельных сигналов с наложенной диаграммой величины относительной скорости корпуса и массы. Два примера таких диаграмм Боде показаны на Фиг. 10. Диаграмма 1000 представляет собой пример, где сигнал при оценке, оказавшейся неподходящей, и диаграмма 1001 представляет собой пример анализа, который показывает подходящий сигнал синхронизации для использования в системе управления. В каждой из диаграмм 1000, 1001 кривая 1012 представляет величину относительной скорости корпуса и массы. Максимум 1014 величины относительной скорости корпуса и массы соответствует антисимметричному движению между ними, как описано выше. Этот максимум был использован для идентификации сигналов, синхронизирующихся с соответствующей точкой.
Диаграмма 1000 Боде на Фиг. 10 показывает неподходящий сигнал синхронизации: разницу между фазой относительной скорости между корпусом и массой и относительным положением этих тел, представленную в виде кривой 1011. Отсутствует фазовая характеристика, наблюдаемая в этом сигнале 1011.
Диаграмма 1001 Боде на Фиг. 10 показывает подходящий сигнал 1013 синхронизации: разницу между фазой относительной высоты между корпусом и океаном и относительной скорости между корпусом и свободной массой. Диаграмма 1001 Боде указывает на то, что этот сигнал синхронизации предпочтительнее сигнала на диаграмме 1000, так как он имеет точку 1015 перегиба, соответствующую максимуму 1014 величины. Это указывает на то, что система синхронизации, основанная на этом сигнале, производит требуемый антисимметричный резонанс между корпусом и свободной массой.
Большое количество потенциально пригодных сигналов может быть непосредственно воспринято или получено из системы, и любой из них может быть использован в волновых генераторах энергии, описанных здесь, если они оказываются эффективными. Например, другими сигналами с соответствующими точками синхронизации являются:
относительное положение корпуса и массы;
разница между относительным положением корпуса и океаном и относительным положением корпуса и массы;
разница между относительным положением корпуса и океаном и относительная скорость массы; и
разница между относительным положением корпуса и массы и относительной скоростью корпуса и массы.
Будет понятно, что переменные, присущие компонентам системы и непосредственно не связанные с координатой, определяемой из океана, являются более желательными из-за трудности в определении относительного положения между корпусом и океаном.
Как отмечено выше, другие формы контроллера также могут быть использованы, например, оптимальное управление, которое не обязательно требует этого определенного фазового отношения. Например, оптимальный контроллер может брать относительное положение корпуса и массы и силу, в настоящее время прикладываемую к ним (измеренную с помощью акселерометра), в качестве входного сигнала. Такой сигнал является достаточным, чтобы служить в качестве целевой функции, позволяющей возвращение параметра, используемого для управления применением силы к системе.
ПРИМЕР
Фиг. 7 представляет собой пример устройства 700 волнового генератора. Как проиллюстрировано, вертикальная ось буя значительно длиннее, чем его горизонтальная ось, хотя это изменяется в зависимости от условий океана и оптимизации характеристики устройства. Устройство 700 имеет вытянутый цилиндрический нижний участок, который вмещает пневматическую рессору 301 с обкатывающей диафрагмой, размещенную на опоре 510 в основании корпуса 507. Свободная масса, включающая противовес 104 и источник поля линейного двигателя, перемещается вдоль линейных подшипников 512, 513 вверх и вниз по вертикальной оси устройства 700.
Верхний цилиндрический участок устройства 700 вмещает якорь линейного двигателя 103. Три фазы 206 линейного двигателя 103 соединены с объединенной системой управления и регулирования энергии. Эта система позволяет преобразование переменного тока, генерируемого в фазах линейного двигателя, в постоянный ток с помощью трех контроллеров полного моста. Эти контроллеры позволяют энергию, возвращаемую непосредственно к фазам двигателя.
Эта система включает контроллеры полного моста, прикрепленные к каждой фазе линейного двигателя. Эти фазы, в свою очередь, соединены с механизмом накопления энергии и устройством 105 отбора мощности. Эти контроллеры полного моста и механизм накопления энергии управляются системой управления.
Опоры 511 обеспечены с возможностью удержания линейного двигателя 103 в верхнем цилиндрическом участке. Амортизатор 101 установлен на верхней части устройства 700 для ограничения воздействия свободной массы на корпусе 507. Несколько датчиков 102 расположены в устройстве с возможностью обмена данными с контроллером 200, который также находится в обмене данными с линейным двигателем 103.
Линейный двигатель 103 в устройстве 700 оптимизирован для эффективности при высокомощной низкоточной работе. Двигатели этого вида используются в компрессорах для охлаждающих устройств с ультранизкой температурой, используемых в криогенных применениях, например, для серий двигателей QDrive STAR; или в американских горках, например, американской горке LSM Intamin. Устройство может быть двигателем с постоянным магнитом, например, этим или устройством двойного питания с возбуждаемым источником поля. Устройство может иметь трехфазный статор и трехфазный ротор. Двигатель соединен со стандартным контроллером полного моста с его выходом и механизмом управления, соединенным с системой управления.
Устройство 700 может иметь диаметр несколько метров (например, 4 м) и высоту, приблизительно в 3-5 раз превышающую диаметр (например, 12 м). Другие размеры могут быть подходящими для других применений.
Фиг. 8 показывает результаты моделирования 800 устройства, включающего полностью моделируемую электрическую систему, работающую на моделируемых океанских волнах 810 подобно волновому профилю реального океана. Кривая 811 показывает моделируемое движение корпуса, и кривая 812 показывает моделируемое движение массы. Фиг. 8 показывает то же самое моделирование дважды. Нижняя диаграмма покрывает больший период времени. В центральном участке нижней диаграммы турбулентные океанские волны нарушают синхронизацию устройства. Однако управление восстанавливается.
Так как устройство 700 работает, приводясь в движение океаном, источник поля и якорь линейного двигателя 103 перемещаются при различных скоростях. Это генерирует мощность переменного тока в трех фазах линейного двигателя, которая преобразуется в постоянный ток и накапливается в устройстве 400 накопления энергии.
Накопленная энергия возвращается к линейному двигателю, прикладывая силу к массе/источнику поля и якорю/корпусу с направлением и интенсивностью, определяемыми системой 200 управления. Таким образом, добавление энергии к системе изменяет движение компонентов так, что система источника поля/массы имеет движение, сдвинутое на 180° к якорю/корпусу (т.е. антисимметричный резонанс между этими двумя).
Моделирования работы устройства указывают на то, что почти идеальный резонанс может быть достигнут в реальных условиях океана. При отсутствии активного управления имеется естественная тенденция для этой системы уходить из резонанса за счет потерь энергии в любой реальной системе, например, из-за трения. Этому противодействует возвращение энергии к системе в моменты, определяемые системой 200 управления.
Система управления использует входные сигналы от датчиков для оптимизации перемещения энергии по всей электрической системе устройства. Устройство 105 отбора мощности может быть соединено с инвертором внутри или снаружи буя. Устройство не требует механического основания и может использовать объединенные устройство отбора мощности и кабель-трос для удержания его от ухода в море при соединении с объектом в океане (например, кораблем, причалом, морской бурильной установкой или морской ветровой турбиной) или постоянной швартовке (например, пластиной, прикрепленной к морскому дну или монопольному основанию).
Фиг. 4 показывает пример "управляющего сигнала" 420, производимого системой управления. Этот управляющий сигнал нормализуется умножением с силой за счет рессоры 301, соединяющей корпус и массу в заданной точке. Это сила обнаруживается другим датчиком в системе. Эта конструкция обеспечивает, что энергия, возвращаемая к системе, пропорциональна амплитуде преобладающего волнового движения. Возвращается больше энергии, чем это было бы неэффективно, так как это будет увеличивать относительную долю энергии, добавляемой к извлекаемой энергии. Меньшее возвращение будет недостаточным для поддержания достаточно близкой синхронизации для увеличения извлечения энергии.
Моделирование идеализированного устройства без моделирования электрических компонентов обозначает значительное увеличение выходной мощности в управляемом по сравнению с неуправляемым случаем. Анализ положения компонентов системы в обоих случаях также показывает вступление в силу системы управления, сохраняющей движение корпуса и массы близко к антисимметричному резонансу. В целом производится больше энергии, так как сохранение системы корпус-масса в антисимметричном резонансе увеличивает среднюю разницу в скорости со временем, как бы то ни было, энергия производится (корпус и масса соединены с якорем линейного двигателя и источником поля соответственно).
Моделирование, включающее электрическую систему, указывает на идентичный эффект, хоть и с дополнительным демпфированием (смоделированным в виде естественной индуктивности и сопротивления линейного двигателя). Это служит для подтверждения того, что система управления может успешно вызывать больше извлекаемой энергии в устройстве, где корпус и масса перемещаются в антисимметричном резонансе, чем в устройстве, где корпус перемещается относительно механического основания или якоря.
Фиг. 11 представляет собой блок-схему, которая иллюстрирует, как компоненты волнового генератора энергии оказывают воздействия друг на друга, и как ток и сигналы данных обмениваются в генераторе.
Океанские волны 201 и плавучий внешний корпус 500 оказывают механическое воздействие друг на друга. Корпус механически соединен с якорем 207 электрической машины 103 и также с пневматической рессорой 301 с обкатывающей диафрагмой. Узел 208 противовеса, который включает противовес 104 и источник поля электрической машины 103, перемещается в корпусе под влиянием гравитации 202. Якорь 207 и источник поля магнитно соединяются, когда электрическая машина работает в качестве генератора или двигателя.
Переменный ток передается между якорем 207 и контроллером 203 полного моста для каждой фазы. Постоянный ток обменивается между контроллером 203 полного моста и устройством 400 накопления энергии с помощью преобразователя 204 постоянного тока в постоянный.
Постоянный ток от контроллера 203 полного моста может течь к инвертору 205, как определяется управляющими сигналами от контроллера 600 контура фазовой автоподстройки частоты. Выход переменного тока инвертора 205 может быть обеспечен для энергетической системы 701. Сигналы данных от датчиков 102 обеспечены для контроллера 600, от которого управляющие сигналы обеспечены для контроллера 203 полного моста и инвертора 205.
Устройство может работать исключительно в режиме переменного тока, исключая необходимость в преобразователях постоянного тока, в которых источник поля линейного двигателя имеет три возбужденные фазы, которые генерируют три фазы мощности переменного тока в обмотках статора двигателя. Контроллеры действуют с возможностью регулирования течения тока через систему.
Синхронизирующее устройство PLL для высокочастотной работы для океанских волн.
В альтернативном варианте осуществления PLL вместо этого синхронизирует волновой генератор энергии с океанскими волнами так, что корпус перемещается в симметричном резонансе с периодом, кратным периоду океанской волны. Это может быть достигнуто путем синхронизации с сигналом, который изменяется с периодом, кратным периоду океанской волны (например, аналитической производной высоты океанской волны в квадрате или просто ее величине).
Движение при частоте, кратной частоте океанской волны, не является естественным резонансом, и требует увеличенного подвода энергии от устройства накопления энергии. Для устройств воображаемой шкалы это также уменьшает относительную скорость корпуса и массы во время работы, тем самым, уменьшая выходную мощность. Однако эта конструкция позволяет массе компонентов уменьшаться при обеспечении подобных операционных параметров, которые могут быть использованы в частности в прибрежных и морских средах. Этот вариант осуществления является более полезным в более крупных вариантах осуществления, где расстояние, которое источник поля должен проходить, больше. Это означает, что средняя относительная скорость источника поля и якоря становится значительно выше, хотя моделирования указывают, что выходная мощность все же не способна соответствовать той, которая в главном варианте осуществления.
Отметим, что эта альтернативная система управления может быть заменена большим количеством PLL или одним PLL, который берет различные сигналы в качестве его входных сигналов. Например, различные сигналы и их сдвинутые по фазе аналоги могут быть использованы для синтеза сигналов удвоенной частоты для ввода в частотный детектор PLL. Например, в другом альтернативном варианте осуществления PLL заменен двумя PLL для того, чтобы заставлять систему корпус-масса продолжать резонировать антисимметрично при перемещении в параметрическом резонансе с океаном - т.е. при частоте, кратной частоте "движущей" океанской волны.
Таким образом, изменяя управляющие сигналы, используемые в PLL, и добавляя дополнительные фазовые детекторы, если требуется, с помощью выбранных управляющих сигналов, устройство может быть выполнено с возможностью функционировать при периоде, кратном периоду движущих океанских волн. Устройство может продолжать работать с массой и корпусом в антисимметричном резонансе или просто синхронизировать движение корпуса с периодом, кратным периоду океанских волн.
Это позволяет устройству быть сконструированным с пропорционально более легкой свободной массой. Эффект этого изменения системы управления может быть усилен путем изменения формы внешнего корпуса. Например, вариант осуществления будет иметь корпус, имеющий форму, подобную двум конусам, соединенным вблизи их концов (например, корпус 506). Это заставляет падающий период волны удваивать его эффект на движении буя, делая его естественный резонанс в два раза больше периода приведенной падающей волны. Другие формы возможны для других значений кратности, обычно включая распределение выступов на внешнем корпусе.
ГОРИЗОНТАЛЬНЫЙ РЕЗОНАНС
В устройстве 700 волновой генератор энергии синхронизируется с вертикальным периодом волн с компенсацией, построенной для их горизонтального компонента (который может быть источником дополнительной энергии). Некоторые применения (например, вблизи побережья) могут требовать устройство, которое не резонируют горизонтально, а также вертикально; это требует движения источника поля, не подвергаемого воздействию любого горизонтального сноса или наклона от вертикальной оси буя. Это может быть достигнуто с помощью широкого конического корпуса, например, корпусов 504, 505, где функциональные компоненты устройства подвешены во втором внутреннем корпусе, подвешенном к внешнему корпусу на двух осях с помощью вращательных подшипников. Внутренняя часть внешнего корпуса здесь выложена материалами, поглощающими воздействие, или устройствами для предотвращения случайного повреждения функциональных компонентов из-за внутреннего корпуса, врезающегося во внешний корпус из-за особенно интенсивного волнового движения или износа осей.
Будет понятно, что изобретение, раскрытое и определенное в этом описании, распространяется на все альтернативные сочетания двух или более отдельных признаков, упомянутых или очевидных из текста или чертежей. Все из этих различных сочетаний образуют различные альтернативные аспекты изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСОВЕРШЕНСТВОВАНИЕ ПЕРВИЧНОГО ДВИГАТЕЛЯ, РАБОТАЮЩЕГО ОТ ЭНЕРГИИ ВОЛН | 1998 |
|
RU2211945C2 |
| Навигационный буй с комплексной энергоустановкой | 2018 |
|
RU2672830C1 |
| СИСТЕМА И СПОСОБ ГЕНЕРАЦИИ И/ИЛИ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ | 2016 |
|
RU2686682C1 |
| ПОПЛАВКОВАЯ ВОЛНОВАЯ ЭЛЕКТРОСТАНЦИЯ | 1993 |
|
RU2037642C1 |
| УСТРОЙСТВО ДЛЯ ПРОИЗВОДСТВА ЭЛЕКТРИЧЕСКОЙ ИЛИ МЕХАНИЧЕСКОЙ ЭНЕРГИИ ИЗ ДВИЖЕНИЯ ВОЛН | 2010 |
|
RU2554704C2 |
| СИСТЕМА И СПОСОБ ГЕНЕРАЦИИ ЭНЕРГИИ | 2016 |
|
RU2718672C2 |
| ГЕНЕРИРОВАНИЕ СЕЙСМИЧЕСКИХ ВИБРАЦИОННЫХ СИГНАЛОВ | 2008 |
|
RU2448349C2 |
| СПОСОБ ПОЛУЧЕНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2006671C1 |
| ПЛАВУЧАЯ ВЕТРОЭЛЕКТРИЧЕСКАЯ УСТАНОВКА | 1998 |
|
RU2173280C2 |
| СПОСОБ И УСТРОЙСТВО ОБМЕНА КИНЕТИЧЕСКОЙ ЭНЕРГИЕЙ С ЖИДКОСТЯМИ | 2006 |
|
RU2362907C1 |


Группа изобретений относится к устройствам и способам генерирования океанской волны. Волновой генератор энергии содержит плавучий корпус, предназначенный для плавания в массе воды. Электрическая машина (103), расположенная в корпусе, имеет якорь и источник поля, причем машина (103) имеет неподвижную часть, соединенную с корпусом, и подвижную часть. Узел (104) противовеса является подвижным в корпусе и содержит подвижную часть машины (103). Относительное перемещение узла противовеса и неподвижной части машины (103) генерирует электрическую энергию. Устройство (400) накопления энергии накапливает энергию, генерируемую машиной (103). Система (200) управления определяет двунаправленный поток энергии между устройством накопления энергии и якорем. Энергия возвращается к машине (103) для приведения в движение узла противовеса антисимметрично движению корпуса. Изобретение направлено на повышение эффективности при генерировании энергии. 2 н. и 21 з.п. ф-лы, 21 ил.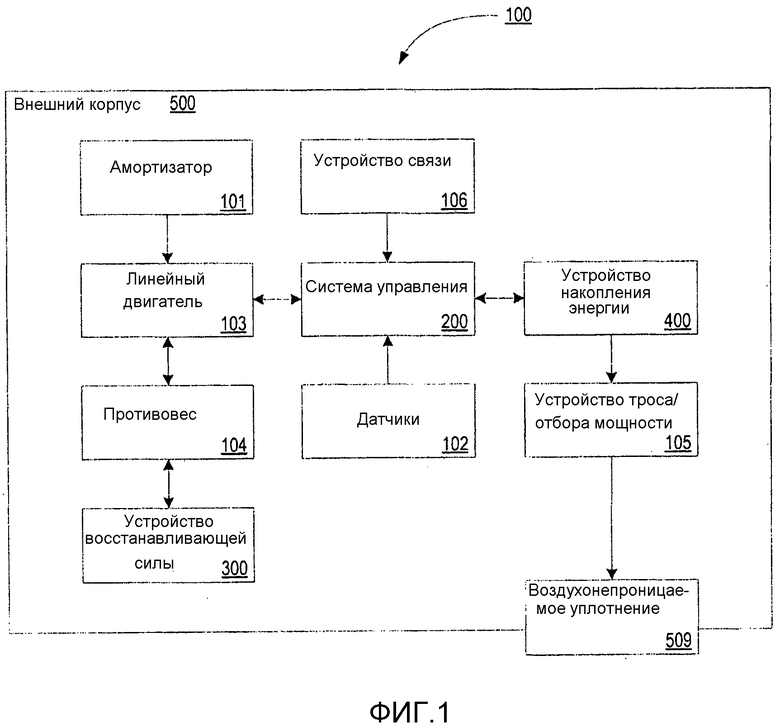
1. Волновой генератор энергии, содержащий:
плавучий корпус, предназначенный для плавания в массе воды;
электрическую машину, расположенную в корпусе, содержащую якорь и источник поля, причем электрическая машина имеет неподвижную часть, соединенную с корпусом, и подвижную часть;
узел противовеса, который является подвижным в корпусе, содержащий подвижную часть электрической машины, и причем относительное перемещение узла противовеса и неподвижной части электрической машины генерирует электрическую энергию;
устройство накопления энергии, которое накапливает энергию, генерируемую электрической машиной;
систему управления, которая определяет двунаправленный поток энергии между устройством накопления энергии и якорем, причем энергия возвращается к электрической машине для приведения в движение узла противовеса антисимметрично движению корпуса так, что движение узла противовеса находится в противофазе с движением корпуса и имеет ту же амплитуду, что и движение корпуса.
2. Волновой генератор энергии по п. 1, содержащий устройство возвращающей силы, расположенное между корпусом и узлом противовеса, причем устройство возвращающей силы прикладывает возвращающую силу на узле противовеса, если узел перемещается в корпусе.
3. Волновой генератор энергии по п. 2, в котором устройство возвращающей силы содержит по меньшей мере одно из: пневматической рессоры, пневматической рессоры с обкатывающей диафрагмой, эластомерной втулки, пружины и пневматического поршня.
4. Волновой генератор энергии по любому из предыдущих пунктов, содержащий множество датчиков с возможностью обмена данными с системой управления, причем датчики обеспечивают сигналы данных, указывающие по меньшей мере одно из:
положения корпуса;
положения узла противовеса;
скорости корпуса;
скорости узла противовеса;
ускорения корпуса;
ускорения узла противовеса;
электрического тока в фазе или фазах электрической машины;
напряжения на фазе или фазах электрической машины;
электрического тока, текущего через компоненты
распределения энергии электрической машины;
электрического тока, текущего через электрические компоненты электроники управления энергией;
напряжения на компонентах распределения энергии электрической машины;
напряжения на электрических компонентах электроники управления энергией; и
фазы тока в фазе или фазах электрической машины.
5. Волновой генератор энергии по п. 4, в котором система управления содержит контур фазовой автоподстройки частоты (PLL), который действует для синхронизации фазы первого сигнала с фазой второго сигнала.
6. Волновой генератор энергии по п. 5, в котором входной сигнал для PLL выбирается из группы, состоящей из:
разницы между положением корпуса и поверхностью океана;
разницы между скоростью корпуса и скоростью узла противовеса; и
разницы между ускорением корпуса и ускорением узла противовеса.
7. Волновой генератор энергии по п. 4, в котором система управления содержит оптимальный алгоритм управления, который действует для возвращения и отбора мощности от электрической машины так, что узел противовеса и корпус перемещаются антисимметрично резонирующим образом.
8. Волновой генератор энергии по любому из пп. 1-3, 5-7, в котором якорь содержит три фазы электрической машины.
9. Волновой генератор энергии по п. 8, в котором каждая фаза связана с контроллером полного моста, который позволяет двунаправленный поток между фазами и устройством накопления энергии.
10. Волновой генератор энергии по п. 1, содержащий схему отбора мощности, которая выводит генерируемую электрическую энергию из волнового генератора энергии.
11. Волновой генератор энергии по п. 10, в котором схема отбора мощности содержит кабель, который действует в качестве троса для волнового генератора энергии.
12. Волновой генератор энергии по любому из пп. 1-3, 5-7, 9-11, содержащий линейные подшипники, выровненные с вертикальной осью корпуса, причем узел противовеса перемещается вдоль линейных подшипников в корпусе.
13. Волновой генератор энергии по любому из пп. 1-3, 5-7, 9-11, в котором корпус содержит вытянутый цилиндр.
14. Волновой генератор энергии по п. 13, в котором вытянутый цилиндр содержит нижний участок, по существу вмещающий узел противовеса, и верхний участок, вмещающий неподвижную часть электрической машины, причем диаметр верхнего участка больше диаметра нижнего участка.
15. Волновой генератор энергии по любому из пп. 1-3, 5-7, 9-11, в котором корпус является коническим.
16. Волновой генератор энергии по п. 15, в котором корпус содержит верхний конический участок, который сужается к промежуточной шейке, и нижний конический участок, который расширяется от промежуточной шейки.
17. Волновой генератор энергии по п. 1, в котором система управления определяет двунаправленный поток энергии в зависимости от периода, кратного периоду волн в массе воды.
18. Волновой генератор энергии по п. 1, в котором по меньшей мере неподвижная часть электрической машины и узел противовеса расположены во втором корпусе, размещенном в плавучем корпусе, и являются вращаемыми относительно плавучего корпуса для поддержания по существу вертикальной ориентации второго корпуса.
19. Волновой генератор энергии по любому из пп. 1-3, 5-7, 9-11, 16-18, содержащий средство тормоза, которое ограничивает движение узла противовеса относительно корпуса.
20. Волновой генератор энергии по п. 19, содержащий средство приведения в действие средства тормоза, если движение генератора превышает заданное пороговое значение, или на основе сигнала от внешнего источника.
21. Волновой генератор энергии по любому из пп. 1-3, 5-7, 9-11, 16-18, 20, в котором неподвижная часть электрической машины содержит якорь, а подвижная часть содержит источник поля.
22. Волновой генератор энергии по любому из пп. 1-3, 5-7, 9-11, 16-18, 20, в котором неподвижная часть электрической машины содержит источник поля, а подвижная часть содержит якорь.
23. Способ генерирования электрической энергии, содержащий этапы, на которых:
a) развертывают волновой генератор энергии в массе воды, причем генератор содержит:
i) плавучий корпус;
ii) электрическую машину, расположенную в корпусе, содержащую якорь и источник поля, причем электрическая машина имеет неподвижную часть, соединенную с корпусом, и подвижную часть;
iii) узел противовеса, который является подвижным в корпусе, содержащий подвижную часть электрической машины, и причем относительное перемещение узла противовеса и неподвижной части электрической машины генерирует электрическую энергию; и
iv) устройство накопления энергии, которое накапливает энергию, генерируемую электрической машиной;
b) определяют двунаправленный поток энергии между устройством накопления энергии и якорем, и
c) возвращают энергию к электрической машине на основе упомянутого определяемого потока энергии, чтобы приводить в движение узел противовеса антисимметрично движению корпуса так, что движение узла противовеса находится в противофазе с движением корпуса и имеет ту же амплитуду, что и движение корпуса.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Воротничок | 1928 |
|
SU15401A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| US 6864592 B1, 08.03.2005 | |||
| ПОПЛАВКОВАЯ ВОЛНОВАЯ ЭЛЕКТРОСТАНЦИЯ | 1993 |
|
RU2037642C1 |

