Изобретение относится к радиотехнике, а именно к пассивной радиолокации, и может быть использовано в системах радиоконтроля при решении задачи скрытного определения координат объектов-носителей источников радиоизлучения (ИРИ) с направленными антеннами.
Общий недостаток, свойственный пассивной радиолокации, является следствием того факта, что из-за отсутствия информации о времени излучения сигнала дальность до источника излучения не может быть определена по данным приема только в одном пункте. Поэтому для определения всех координат излучающего объекта требуется комплекс из двух или более разнесенных пунктов приема, объединенных каналами связи [1].
Широко известен триангуляционный способ определения дальности до источника излучения, основанный на измерении направлений (пеленгов) на излучающий объект минимум в двух приемных пунктах (в одной плоскости), разнесенных на некоторое известное расстояние, называемое измерительной базой, и вычислении дальности до объекта по двум пеленгам и измерительной базе [2, с.494], [3].
Недостатки способа:
- требует для реализации большого аппаратурного состава - не менее двух радиопеленгаторов;
- требуются большие расстояния между приемными пунктами-пеленгаторами;
- необходимы каналы связи (радиосвязи) для передачи принятых сигналов в пункт вычисления координат источника излучения.
Также известен угломерно-разностно-дальномерный способ, основанный на измерении направления на ИРИ и разности расстояний от него до приемных пунктов. При измерении координат на плоскости достаточно иметь минимум два приемных пункта. Недостатки способа - такие же, как и в предыдущем случае, но аппаратура для реализации способа может быть проще, т.к. достаточно лишь в одном из двух приемных пунктов иметь пеленгатор, измеряющий направление на ИРИ [2, с.497], [4].
Наиболее близким по технической сущности к предлагаемому следует считать разностно-дальномерный способ, принятый в качестве прототипа. Способ основан на измерении разности расстояний (или разности временных задержек сигнала) от источника излучения до пунктов приема. Для определения координат на плоскости (дальность и пеленг) необходимо знать расстояния между пунктами приема и измерить хотя бы две разности временных задержек сигнала, т.е. иметь минимум три пункта приема [2, с.496], [5].
Разностно-дальномерный способ включает:
- обнаружение и измерение параметров сигналов ИРИ;
- идентификацию сигналов по измеренным параметрам сигналов;
- измерение временных задержек между идентифицированными сигналами;
- вычисление дальности до ИРИ по известным расстояниям между приемными пунктами и измеренным временным задержкам между принятыми сигналами.
Недостатки способа-прототипа:
- большая измерительная база (расстояния между приемными пунктами), зачастую соизмеримая с дальностью до ИРИ, что не позволяет реализовать способ на одном подвижном объекте (корабль, самолет);
- наличие каналов связи (радиосвязи) для передачи сигналов в пункт вычисления задержек сигналов и дальности до ИРИ.
Целью изобретения является устранение недостатков способа-прототипа, а именно:
- уменьшение измерительной базы до величины, приемлемой для объекта-носителя аппаратуры измерения дальности;
- исключение каналов связи (радиосвязи), что позволяет реализовать способ пассивного определения дальности до ИРИ на подвижных объектах.
Техническим результатом изобретения является возможность пассивного определения дальности до ИРИ с направленной антенной, ориентированной главным лепестком на антенну пеленгатора, причем последняя образует с антеннами дополнительных приемных пунктов измерительную базу, существенно меньшую по размерам, чем при реализации известного разностно-дальномерного способа определения дальности, что, в свою очередь, позволяет исключить каналы связи (радиосвязи) для передачи принятых сигналов в пункт вычисления дальности и, в целом, использовать предлагаемый способ на подвижных объектах. Для достижения указанного технического результата предлагается способ определения дальности до источника радиоизлучения с направленной антенной, включающий:
- обнаружение, пеленгование сигналов ИРИ и измерение их параметров радиопеленгатором;
- обнаружение и измерение параметров сигналов ИРИ двумя или более дополнительными приемными пунктами, антенны которых образуют с антенной пеленгатора измерительную базу;
- идентификацию сигналов дополнительных приемных пунктов с сигналами, обнаруженными пеленгатором;
- запоминание амплитуд идентифицированных сигналов ИРИ;
- запрос по совокупности измеренных параметров сигналов ИРИ базы данных ранее разведанных ИРИ с целью установления типа ИРИ и ширины его антенного луча;
- настройку генератора калибровки в соответствии с измеренными несущей частотой и амплитудой сигнала ИРИ;
- калибровку по амплитуде приемных каналов пеленгатора и дополнительных приемных пунктов;
- корректировку по результатам калибровки запомненных амплитуд идентифицированных сигналов ИРИ;
- расчет ширины антенного луча, выраженной в линейных единицах, по скорректированным значениям амплитуд при использовании аппроксимации антенного луча в главном лепестке;
- определение дальности до ИРИ в виде отношения рассчитанной ширины антенного луча в линейных единицах к извлеченному из базы данных значению ширины антенного луча в угловой радианной мере.
Сущность предлагаемого способа и результаты моделирования поясняются чертежами.
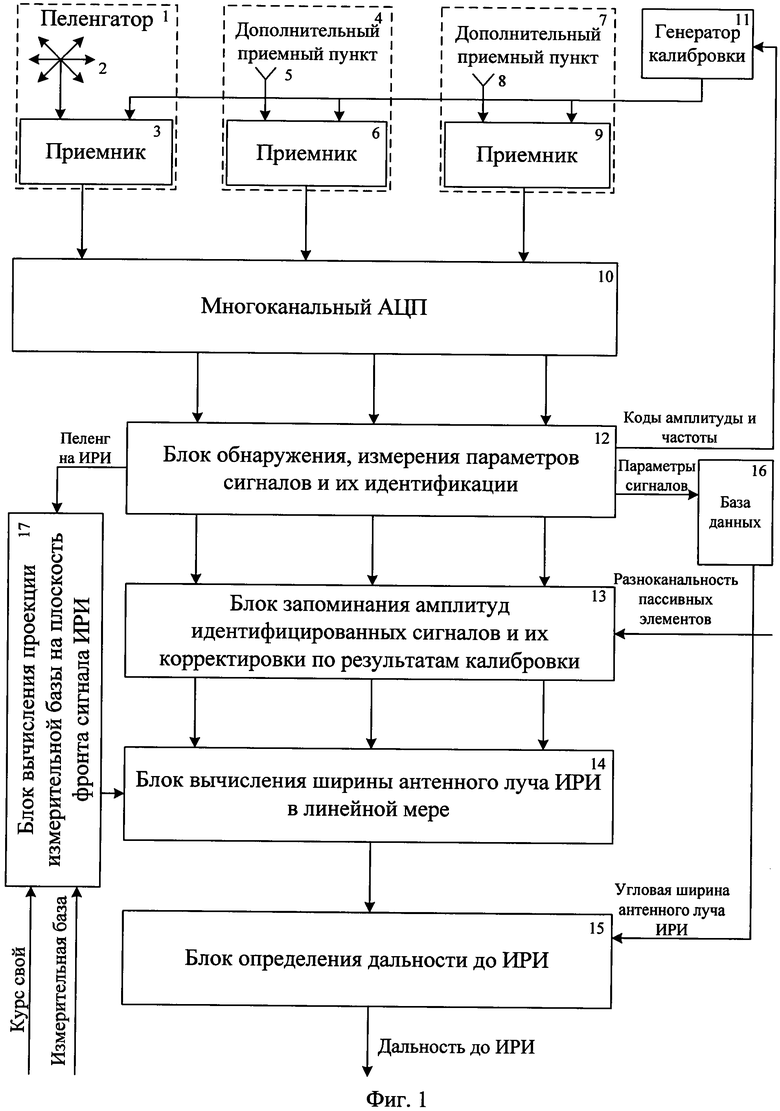
Фиг.1. Структурная схема устройства, реализующего способ определения дальности до ИРИ с направленной антенной.
Фиг.2. Взаимное расположение ИРИ, радиопеленгатора и дополнительных приемных пунктов.
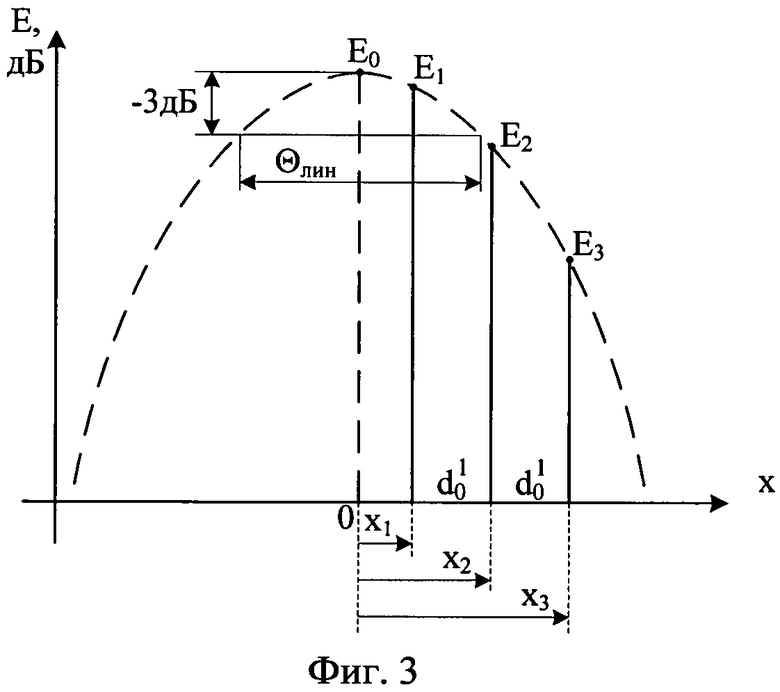
Фиг.3. Главный лепесток луча антенны ИРИ, измеренный в линейных единицах.
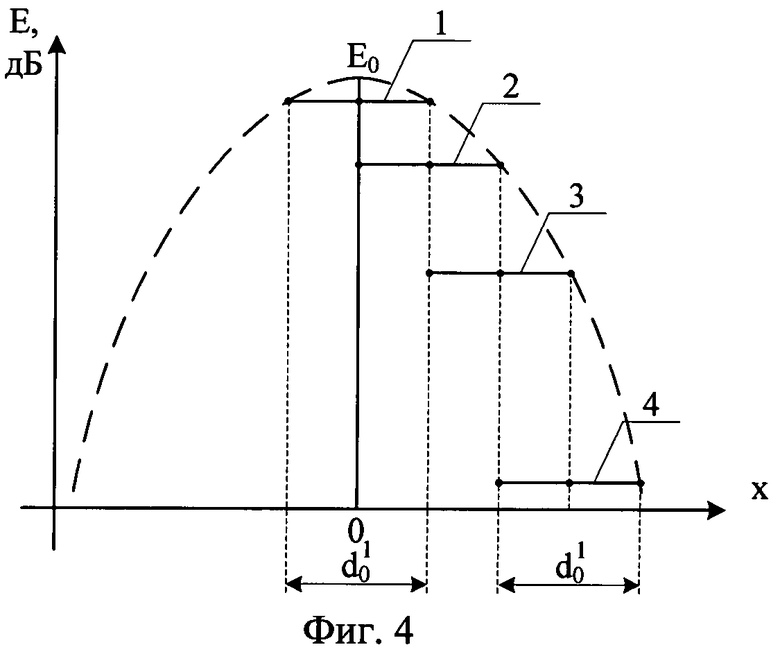
Фиг.4. Возможные варианты расположения проекции трехточечной измерительной базы относительно главного луча антенны ИРИ.
Фиг.5. Ошибка определения дальности.
На чертежах приняты следующие обозначения.
Фиг.2: N - направление на север;
1 - радиопеленгатор;
2, 3 - дополнительные приемные пункты;
4 - главный лепесток луча антенны ИРИ;
К - курс носителя пеленгатора и совпадающее с ним направление измерительной базы;
d0 - расстояние между приемными пунктами 1 и 2, 2 и 3;
 - проекция расстояния d0 на плоскость фронта сигнала от ИРИ;
- проекция расстояния d0 на плоскость фронта сигнала от ИРИ;
Е1, Е2, Е3 - напряженность поля сигнала ИРИ в пунктах приема 1, 2, 3;
β - угол охвата лучом антенны ИРИ крайних точек измерительной базы.
R - дальность до ИРИ.
Фиг.3: E0 - напряженность поля, соответствующая максимуму антенного луча ИРИ;
Θлин - ширина антенного луча ИРИ в линейной мере на уровне минус 3 дБ от максимума;
х1, х2, х3 - линейные отклонения приемных пунктов 1, 2 и 3 от максимума антенного луча.
Фиг.4:  - величина проекции трехточечной измерительной базы на плоскость фронта сигнала от ИРИ;
- величина проекции трехточечной измерительной базы на плоскость фронта сигнала от ИРИ;
1, 2, 3, 4 - варианты положения проекции трехточечной измерительной базы относительно антенного луча ИРИ.
Фиг.5:  - проекция трехточечной измерительной базы на плоскость фронта сигнала ИРИ.
- проекция трехточечной измерительной базы на плоскость фронта сигнала ИРИ.
 - среднеквадратическая ошибка от истинной дальности.
- среднеквадратическая ошибка от истинной дальности.
1, 2, 3, 4 - варианты положения проекции измерительной базы (см. фиг.4).
Способ определения дальности до ИРИ с направленной антенной осуществляется следующим образом.
1. Сигнал ИРИ обнаруживается как пеленгатором, так и дополнительными приемными пунктами, причем антенны последних образуют с антенной пеленгатора измерительную базу.
2. Производится измерение необходимых для идентификации параметров обнаруженных сигналов (несущая частота, длительность и пр.), а также измеряются:
- направление прихода сигналов - пеленг на ИРИ (достаточно выполнить только по сигналам пеленгатора);
- амплитуды сигналов, пришедших одновременно;
- направление линии измерительной базы (курс свой при расположении пеленгатора на носителе, а антенн пеленгатора и дополнительных приемных пунктов - в диаметральной плоскости носителя),
и выполняется идентификация принятых сигналов, принадлежащих одному и тому же ИРИ.
3. Осуществляется запоминание амплитуд идентифицированных сигналов ИРИ.
4. По совокупности измеренных параметров сигналов ИРИ осуществляется запрос базы данных ранее разведанных ИРИ с целью установления типа ИРИ и ширины его антенного луча.
5. В соответствии с измеренными несущей частотой и амплитудами сигнала ИРИ на выходах приемных каналов настраивается генератор калибровки и производится калибровка по амплитуде приемных каналов пеленгатора и дополнительных приемных пунктов.
6. По результатам калибровки корректируются запомненные амплитуды идентифицированных сигналов ИРИ.
7. По скорректированным амплитудам, используя аппроксимацию антенного луча в главном лепестке, рассчитывается ширина антенного луча, выраженная в линейных единицах - долях проекции измерительной базы на плоскость фронта приходящих от ИРИ сигналов, как показано на фиг.2.
Главный лепесток луча антенны ИРИ хорошо аппроксимируется выражением [6, стр.47]:
где Θугл - угловая ширина антенного луча на уровне минус 3 дБ от максимума;
Θ - угол отклонения от максимума;
Е0, Е - напряженность поля в максимуме антенного луча и при отклонении от максимума на угол Θ;
е - основание натуральных логарифмов.
Если величины Е и Е0 измерены на приемной стороне в децибелах относительно единичного шума, то
Далее все величины Е (Е0, Е1, Е2, Е3) выражаются в децибелах.
При большой дальности до ИРИ антенный луч может быть представлен в линейной мере:
где х - линейное отклонение от максимума антенного луча;
Θлин - ширина антенного луча на уровне минус 3 дБ в линейной мере.
За линейную меру принимается  - доля проекции измерительной базы
- доля проекции измерительной базы  где n - число дополнительных (кроме пеленгатора) приемных пунктов, согласно фиг.2:
где n - число дополнительных (кроме пеленгатора) приемных пунктов, согласно фиг.2:

где d0 - расстояние между соседними приемными пунктами;
К - курс носителя пеленгатора (пеленг на измерительную базу);
П - пеленг ИРИ, измеренный пеленгатором.
Для восстановления луча антенны ИРИ достаточно трех амплитуд сигналов: от пеленгатора и двух приемных пунктов. Действительно, значения напряженности поля в точках 1, 2, 3 (фиг.2 и фиг.3) или пропорциональных им напряжений на выходах приемных каналов равны:
они характеризуют один и тот же антенный луч вида (1) или (2), т.е. образуют систему уравнений. Поскольку (фиг.3)
три уравнения (5) можно преобразовать в систему из двух уравнений:
решая которую, находим:
расчетное (по результатам измерений величин Е1, Е2, Е3) значение максимума антенного луча
и ширину антенного луча в линейной мере
Из двух последних выражений следует выбрать то, у которого знаменатель больше, чтобы уменьшить влияние случайных ошибок измерения величин Е1, Е2, Е3.
8. Определяется дальность до ИРИ как отношение ширины антенного луча в линейных единицах к извлеченному из базы данных значению ширины антенного луча ИРИ в угловой радианной мере.
Эта операция основывается на пропорциональности соответствующих величин в угловой и линейной мере:

где  - проекция измерительной базы на плоскость фронта приходящих от ИРИ сигналов;
- проекция измерительной базы на плоскость фронта приходящих от ИРИ сигналов;
β - угол охвата лучом антенны ИРИ крайних точек измерительной базы (проекции измерительной базы),
откуда угол охвата
и дальность до ИРИ

где Θугл[рад] - извлеченная из базы данных ширина антенного луча ИРИ в радианной мере.
Устройство (фиг.1) с трехточечной измерительной базой, в котором реализуется предложенный способ, содержит пеленгатор 1 с антенной 2 и приемником 3 и два дополнительных приемных пункта 4, 7 с антеннами 5, 8 и приемниками 6, 9. Выходы приемников 3, 6, 9 соединены с входами многоканального аналого-цифрового преобразователя (АЦП) 10. Генератор калибровки 11 имеет одинаковые по уровню сигналов выходы, соединенные со входами приемников 3, 6 и 9. Выходы многоканального АЦП 10 подключены к последовательному соединению: блок обнаружения, измерения параметров сигналов и их идентификации 12, блок запоминания амплитуд идентифицированных сигналов и их корректировки по результатам калибровки 13, блок вычисления ширины антенного луча ИРИ в линейной мере 14 и блок определения дальности до ИРИ 15, выход которого является выходом устройства. Блок обнаружения, измерения параметров сигналов и их идентификации 12 также соединен со входом управления генератора калибровки 11, адресным входом базы данных 16 и своим выходом пеленга ИРИ - с блоком вычисления проекции измерительной базы на плоскость фронта сигнала ИРИ 17. На два других входа блока 17 подаются сигналы «КУРС СВОЙ» и «ИЗМЕРИТЕЛЬНАЯ БАЗА», а его выход соединен с блоком вычисления ширины антенного луча ИРИ в линейной мере 14. Выход базы данных 16 соединен с другим входом блока определения дальности до ИРИ 15.
Пеленгатор 1 может быть различного типа и иметь неподвижную или сканирующую пеленгационную антенну 2, одноканальный или многоканальный приемник 3; в последнем случае выходов на АЦП будет несколько, а не один, как показано на фиг.1, что не принципиально для реализации предложенного способа.
Дополнительные приемные пункты 4 и 7 должны позволять принимать в частотном и динамическом диапазонах те же сигналы, что и пеленгатор, и в отличие от пеленгатора их антенны 5 и 8 и приемники 6 и 9 могут быть выполнены существенно проще аппаратурно. Многоканальный АЦП 10 управляется общим для всех своих каналов тактовым генератором (на фиг.1 не показан) с возможностью точного отсчета моментов времени, что необходимо для измерения параметров сигналов. Начиная с выходов АЦП, ведется обработка цифровых кодов сигналов, принятых пеленгатором 1 и дополнительными приемными пунктами 4 и 7, и она может быть осуществлена как аппаратным построением, так и программным путем в ЭВМ вплоть до вывода значения дальности ИРИ.
Устройство, реализующее способ определения дальности до ИРИ, работает следующим образом.
Излученные неподвижной (допустимо и сканирующей) направленной антенной сигналы ИРИ одновременно принимаются пеленгационной антенной 2 и антеннами 5 и 8, образующими измерительную базу, усиливаются и переносятся на промежуточную (или видео) частоту в приемниках 3, 6 и 9 и по радиочастотным кабелям передаются от антенных постов 1, 4 и 7 к рубочной аппаратуре, входным каскадом которой является многоканальный АЦП 10. Напряжения, поступающие на входы многоканального АЦП 10 (внутриприемные шумы и сигналы от ИРИ) преобразуются в АЦП в цифровые коды отсчетов с тактовой частотой, отвечающей полосе наиболее широкополосных принимаемых сигналов. Эти отсчеты подвергаются обработке в дальнейшей части рассматриваемого устройства. Блок 12 осуществляет обнаружение сигналов, фиксируя при этом их амплитуды, измерение параметров обнаруженных сигналов и идентификацию сигналов (т.е. принадлежность их одному и тому же ИРИ), принятых пеленгатором 1 и дополнительными приемными пунктами 4 и 7. Если сигналы идентифицированы, производится запись их амплитуд в блоке 13, по совокупности измеренных параметров - запрос базы данных 16, а по кодам несущей частоты и среднего значения амплитуд сигналов ИРИ - настройка генератора калибровки 11. Настроенный по амплитуде и несущей частоте генератор калибровки 11 обеспечивает на входах приемников 3, 6 и 9 одинаковые по уровню сигналы, при этом прием сигналов ИРИ из эфира прекращается, на входах АЦП 10 формируются амплитуды, разности которых с высокой степенью точности характеризуют разноканальность приемников 3, 6 и 9 на измеренной несущей частоте и в достаточно узкой области динамического диапазона сигналов. По результатам калибровки, а также по известным данным разноканальности пассивных элементов хранящихся в памяти блока 13 (антенны, фидерные тракты, выходы генератора калибровки 11) производится корректировка записанных амплитуд идентифицированных сигналов ИРИ. По пеленгу на ИРИ, курсу своему носителя пеленгатора и измерительной базе в блоке 17 рассчитывается величина проекции измерительной базы, используя которую, а также скорректированные амплитуды сигналов ИРИ блока 13, по соотношениям (7) и (8) рассчитывается в блоке 14 ширина антенного луча ИРИ в линейной мере, после чего в блоке 15 определяется дальность до ИРИ как отношение этой величины к извлеченному из базы данных 16 значению угловой ширины антенного луча ИРИ, выраженному в радианах.
После определения дальности производится сброс текущей информации в блоках 12, 13, 14, 15 и 17 и возобновляется прием сигналов.
На фиг.5 представлены результаты моделирования, подтверждающие достижимость технического результата изобретения, а именно возможность пассивного определения дальности до ИРИ с направленной антенной, ориентированной главным лепестком на антенну пеленгатора, причем последняя образует с антеннами дополнительных приемных пунктов измерительную базу, существенно меньшую по размерам, чем при реализации известного разностно-дальномерного способа определения дальности, что, в свою очередь, позволяет исключить каналы связи (радиосвязи) для передачи принятых сигналов в пункт вычисления дальности и, в целом, использовать предлагаемый способ на подвижных объектах.
Результаты получены для дальности 50 км при отношении сигнал/шум в месте приема 20 дБ для ИРИ с неподвижной антенной, имеющей θугл=1.8°, которым может быть РЛС в режиме автосопровождения, активная головка самонаведения нападающей ракеты, радиостанция с направленным излучением и пр.
Таким образом, за счет введения операций:
- запроса базы данных ранее разведанных ИРИ с целью установления типа ИРИ и ширины его антенного луча по совокупности измеренных параметров сигналов;
- настройки генератора калибровки в соответствии с измеренными несущей частотой и амплитудой сигнала ИРИ;
- калибровки приемных каналов пеленгатора и дополнительных приемных пунктов по амплитуде;
- корректировки запомненных амплитуд идентифицированных сигналов ИРИ по результатам калибровки;
- расчета ширины антенного луча, выраженной в линейных единицах, по скорректированным значениям амплитуд, используя аппроксимацию антенного луча в главном лепестке;
- определения дальности до ИРИ по отношению ширины антенного луча, выраженной в линейных единицах, к извлеченному из базы данных значению ширины антенного луча ИРИ в угловой радианной мере удается решить поставленную задачу.
Источники информации
1. B.C.Кондратьев, А.Ф.Котов, Л.Н.Марков. Многоканальные радиотехнические системы. - М.: «Радио и связь», 1986.
2. Теоретические основы радиолокации. Под редакцией Я.Д.Ширмана. - М.: «Советское радио», 1970.
3. Патент №2073380 «Многопозиционная система определения местоположения объектов» МПК 7: G01S 5/00, 5/04.
4. Патент №2058563 «Устройство определения расстояния и направления до источника радиоизлучения» МПК 7: G01S 5/12.
5. Патент №2096800 «Дальномерный способ определения местоположения радиостанций по разности прихода радиосигнала по времени в пункты приема» МПК 7: G01S 5/02.
6. Д.Бартон, Г.Вард. Справочник по радиолокационным измерениям. - М.: «Советское радио», 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИЗЛУЧАЮЩЕЙ ОБЗОРНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2010 |
|
RU2444748C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2015 |
|
RU2580933C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПАССИВНЫМ МОНОСТАТИЧЕСКИМ ПЕЛЕНГАТОРОМ | 2014 |
|
RU2557808C1 |
| РАЗНЕСЕННЫЙ РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ ПЕЛЕНГАТОР | 2008 |
|
RU2382378C1 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2020 |
|
RU2758832C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы и устройство для его реализации | 2023 |
|
RU2826616C1 |
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2020 |
|
RU2742581C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2007 |
|
RU2334244C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ И ПАССИВНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, ИСПОЛЬЗУЕМАЯ ПРИ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2004 |
|
RU2275649C2 |


Изобретение относится к радиотехнике и может быть использовано в системах радиоконтроля при решении задачи скрытного определения координат объектов-носителей источников радиоизлучения (ИРИ) с направленными антеннами. Достигаемым техническим результатом изобретения является возможность пассивного определения дальности до ИРИ с направленной антенной, ориентированной своим главным лепестком на антенну пеленгатора, причем последняя образует с антеннами дополнительных приемных пунктов измерительную базу, существенно меньшую по размерам, чем при реализации известного разностно-дальномерного способа определения дальности, что, в свою очередь, позволяет исключить каналы связи (радиосвязи) для передачи принятых сигналов в пункт вычисления дальности и, в целом, использовать способ на подвижном объекте-носителе пеленгатора. Измерительная база осуществляет съем пропорциональных напряженности поля амплитуд сигналов, по которым восстанавливается главный лепесток антенного луча ИРИ в линейной мере. Определение дальности до ИРИ достигается путем вычисления отношения рассчитанной ширины антенного луча ИРИ в линейных единицах к извлеченному из базы данных значению ширины антенного луча в угловой радианной мере. 5 ил.
Способ определения дальности до источника радиоизлучения (ИРИ) с направленной антенной, включающий обнаружение, пеленгование сигналов ИРИ и измерение их параметров радиопеленгатором, обнаружение и измерение параметров сигналов ИРИ двумя или более дополнительными приемными пунктами, антенны которых образуют с антенной пеленгатора линейную измерительную базу, идентификацию их сигналов с сигналами, обнаруженными пеленгатором, запоминание амплитуд идентифицированных сигналов ИРИ, отличающийся тем, что по совокупности измеренных параметров сигналов ИРИ осуществляют запрос базы данных ранее разведанных ИРИ с целью установления типа ИРИ и ширины его антенного луча, настраивают генератор калибровки в соответствии с измеренными несущей частотой и амплитудой сигнала ИРИ, калибруют по амплитуде приемные каналы пеленгатора и дополнительных приемных пунктов, по результатам калибровки корректируют запомненные амплитуды идентифицированных сигналов ИРИ, по скорректированным значениям амплитуд, используя аппроксимацию антенного луча в главном лепестке, рассчитывают ширину антенного луча, выраженную в линейных единицах, и по отношению последней к извлеченному из базы данных значению ширины антенного луча ИРИ в угловой радианной мере определяют дальность до ИРИ.
| ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАДИОСТАНЦИИ ПО РАЗНОСТИ ПРИХОДА РАДИОСИГНАЛА ВО ВРЕМЕНИ В ПУНКТЫ ПРИЕМА | 1993 |
|
RU2096800C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛИНИИ ПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2002 |
|
RU2205416C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2007 |
|
RU2327186C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2305851C2 |
| US 3798647 A, 19.03.1974 | |||
| EP 1471364 A2, 27.10.2004 | |||
| Рулевой механизм транспортного средства со встроенным усилителем | 1970 |
|
SU532332A3 |

