Изобретение относится к машиностроению, в частности к устройствам подъема летательных аппаратов на высоту, а именно к винтомоторным установкам малоразмерных летательных аппаратов, и может быть использовано в авиамодельном спорте в качестве силовой установки моделей самолетов для участия в соревнованиях, хобби и отдыха.
Известны модели самолетов класса F1C согласно Кодексу FAI для участия в соревнованиях, оснащаемые винтомоторной установкой (ВМУ) с поршневым двигателем внутреннего сгорания (ДВС) ограниченного рабочего объема, обеспечивающим вращение воздушного винта, создающего силу тяги для подъема модели на высоту (см., например, сайт в Интернет http://skyflex.air.ru/pages/ffly_timer.shtml. https://masteraero.ru/tm7.php).
Правилами соревнований время работы двигателя ограничено 4 секундами; по истечении моторного времени подъем модели прекращается, модель переводится в горизонтальное положение и продолжает хронометрируемый планирующий полет. С учетом ограничений по нагрузке на несущую поверхность максимальная продолжительность полета модели зависит от высоты подъема модели. В свою очередь, высота подъема модели при стандартных рабочем объеме двигателя и топливе тем больше, чем выше сила тяги воздушного винта и реализуемые скорость и ускорение подъема, что определяется совершенством ВМУ.
Известно, что сила тяги и момент сопротивления воздушного винта - величины не стационарные и зависят от значения относительной поступи воздушного винта, которая, в свою очередь, зависит от скорости вращения воздушного винта и скорости движения летательного аппарата (ЛА) в воздухе. При этом коэффициент полезного действия (КПД) воздушного винта постоянного шага, как аэродинамического устройства, создающего элементами лопасти аэродинамическую силу и в конечном итоге силу тяги, с ростом относительной поступи вначале растет, затем достигает максимума и далее падает, вплоть до нулевого значения и далее отрицательных значений. Это означает, что сила тяги воздушного винта с ростом скорости ЛА падает, что влечет за собой уменьшение ускорения и скорости подъема и не позволяет обеспечить подъем модели на желаемую максимальную высоту.
Известна классическая авиамодельная ВМУ, когда воздушный винт установлен непосредственно на коленчатом валу ДВС и угловая скорость его вращения (количество оборотов в минуту) соответствует оборотам ДВС. Максимальный диаметр и угол установки лопастей, определяющие величину силы тяги и момента сопротивления вращению такого воздушного винта, определяются максимальным крутящим моментом ДВС, величина которого ограничена рабочим объемом, конструктивными параметрами ДВС и теплотворностью стандартного топлива. Возможности повышения высоты подъема модели с использованием такой ВМУ ограничены и при сегодняшнем уровне развития практически исчерпаны, что, например, указано в работе Horst Schulze, «Luftschrauben fur Modellantriebe», Berlin, 1980.
Дальнейшее развитие ВМУ таймерной модели осуществлялось с использованием трансмиссии для увеличения крутящего момента ДВС, в качестве которой использовались понижающие редукторы, в том числе планетарные механизмы с передаточным отношением до 0,25 (1:4). Такое техническое решение дало возможность двукратного увеличения диаметра воздушного винта, увеличения углов установки и количества его лопастей, что обеспечило существенный рост статической тяги воздушного винта и, соответственно, стартовой тяговооруженности таймерной модели до четырех единиц. Но применение редуктора в составе ВМУ одновременно с увеличением крутящего момента на эту же величину уменьшает угловую скорость вращения (обороты) лопастей воздушного винта, что отрицательно влияет на характеристики воздушного винта в движении. А именно, относительная поступь воздушного винта, как функция скорости лопасти и скорости ЛА, растет в два раза быстрее и, соответственно, быстрее падает коэффициент тяги воздушного винта. КПД воздушного винта, достигнув своего максимума через 2 секунды полета, быстро падает (мотор работает, а винт не тянет). Как следствие, скорость, ускорение и высота подъема модели, как правило, не превышают или незначительно превышают значения, достигаемые с использованием классической ВМУ.
Объяснение такому характеру работы воздушного винта может быть дано исходя из его аэродинамической концепции, а именно на реализуемых (дозвуковых) скоростях обтекания лопасти воздушного винта, каждый из его элементов работает как элемент крыла со своим профилем и реализующимся на этом элементе лопасти углом атаки. Максимальная аэродинамическая сила и, соответственно, сила тяги элемента лопасти реализуется только на определенном для данного профиля угле атаки, следовательно, только при определенном сочетании скоростей вращения лопасти воздушного винта и скорости движения ЛА в воздухе. При других сочетаниях скоростей угол атаки такого элемента или велик, или наоборот мал, и, соответственно, аэродинамическая сила (сила тяги) не может обеспечить достижения желаемой (требуемой) высоты подъема модели.
Тем не менее, таймерная ВМУ с редуктором на определенных режимах работы (неподвижно на земле и в начальной стадии разгона модели) обеспечивает существенно большую стартовую тяговооруженность модели, а значит ускорение, динамику разгона (увеличения скорости) подъема модели.
Основная особенность подъема таймерной модели - это не стационарность скорости подъема. В начале она минимальная - 3-5 м/с, исходя из физических возможностей спортсмена, а в конце подъема достигает значения 40 м/с и более благодаря работе ВМУ, при этом функция изменения скорости от времени не линейная.
Для достижения максимальной высоты подъема требуется обеспечить при разгоне модели постоянный угол атаки элементов лопасти, на котором реализуется такое значение аэродинамической силы, которое в конечном итоге обеспечивает максимальную силу тяги воздушного винта. Это возможно реализовать увеличением угла наклона лопасти в соответствии с законом увеличения скорости модели, что обеспечивает постоянство угла атаки сечений лопасти воздушного винта.
В авиации такое техническое решение известно и широко применяется как воздушный винт изменяемого шага (ВИШ). Сначала применялись двухшаговые ВИШ, осуществляющие раздельно режимы взлета и маршевого полета самолета. Довольно скоро были созданы ВИШ, управление которыми осуществлялось в реальных условиях полета ЛА, характеризуемых изменением скорости. Сегодня ВИШ это обыденное явление в авиации. Системы управления углом атаки лопастей ВИШ реализуются на различных физических принципах и устройствах: гидравлический, электрический, аэромеханический, комбинированный (см., например, сайт в Интернет http://refdb.ru/look/2116006.html). Однако их применение в конструкциях ВМУ таймерной модели оказалось невозможным в связи со значительными габаритами, массой, наличием энергоносителей, сложностью в эксплуатации.
Из уровня техники известна силовая установка с воздушным винтом, содержащая двигатель с выходным валом, редуктор двигателя с выходным звеном, связанный с воздушным винтом, редуктор двигателя расположен соосно с выходным валом двигателя, а выходное звено редуктора установлено на выходном валу двигателя с возможностью передачи тяги от воздушного винта, установленного на выходном звене редуктора, непосредственно на выходной вал двигателя (см. патент RU 2042580, опубл. 27.08.1995).
Недостатком известного решения является снижение угловой скорости вращения лопастей винта, что исключает возможность увеличения скорости ЛА в воздухе. Кроме того, необходимы дополнительные меры по сокращению вибрации, растет вес, усложняется конструкция и эксплуатация.
Наиболее близким решением к предложенному изобретению является винтомоторная установка, содержащая двигатель с трансмиссией, связанной с воздушным винтом, имеющим лопасти, которые установлены с возможностью изменения шага и связаны с трансмиссией посредством системы управления поворотом лопастей с возможностью изменения угла установки лопастей (см. ЕР 2384966 А2, опубл. 09.11.2011).
Недостатками наиболее близкого решения являются: большие габариты и масса, значительное количество составных частей и элементов, усложняющее изготовление и эксплуатацию, в том числе наличие винтовых пар (элементов), преобразующих вращательное движение в поступательное, элементов защиты от высоких температур авиационных двигателей и других факторов их функционирования, обеспечения безопасности, наличие дополнительных источников энергии и энергоносителей, в том числе электрогенератора, электрических линий и электродвигателей, гидравлического компрессора и гидравлических линий. Все эти известные и применяемые при создании авиационной техники технические решения не могут быть применены при создании малоразмерных летательных аппаратов и моделей самолетов для участия в соревнованиях, хобби и отдыха в силу их сущностных ограничений по массе, габаритным размерам и энергетике двигателя.
Целью настоящего изобретения является создание эффективной ВМУ таймерной модели, обеспечивающей максимальную высоту подъема, имеющую простую конструкцию с минимальной массой, удобной в эксплуатации, сочетающей достоинства применения трансмиссии, воздушного винта изменяемого шага и электронной системы управления в пределах ограничений габаритных размеров и массы таймерной модели.
Техническим результатом изобретения является обеспечение возможности изменения угла установки лопастей в зависимости от изменения скорости подъема летательного аппарата с обеспечением постоянного угла атаки элементов лопастей для реализации максимального значения аэродинамической силы и силы тяги воздушного винта и, соответственно, максимальной скороподъемности летательного аппарата.
Технический результат изобретения достигается благодаря тому, что винтомоторная установка содержит двигатель с трансмиссией, связанной с воздушным винтом, имеющим лопасти, установленные с возможностью поворота вокруг своих осей, связанные с системой управления поворотом лопастей с возможностью изменения угла установки лопастей с обеспечением постоянного угла атаки в каждом поперечном сечении каждой лопасти, при этом воздушный винт включает в себя ступицу с установленными на ней поворотными втулками, на которых закреплены лопасти, при этом каждая поворотная втулка имеет кривошип, связанный с системой управления поворотом лопастей.
Кроме того, система управления поворотом лопастей может включать механизм поворота лопастей, связанный с кривошипами поворотных втулок, а также блок управления, связанный с механизмом поворота лопастей.
Механизм поворота лопастей может включать толкатель, связанный с кривошипами поворотных втулок и с блоком управления, а также привод толкателя, при этом привод толкателя может включать упругие элементы для продольного перемещения толкателя с возможностью воздействия на поворотные втулки и управления шагом воздушного винта.
Блок управления может быть связан с толкателем посредством тяги.
Кроме того, трансмиссия представляет собой преимущественно планетарный редуктор, имеющий водило, разъемно соединенное со ступицей посредством торцевого шлицевого и резьбового соединения.
Кроме того, водило планетарного редуктора может иметь по меньшей мере два сателлита, установленные на осях и находящиеся в зацеплении с солнечной шестерней, разъемно соединенной с тормозным барабаном, который неподвижно соединен с выходным валом двигателя.
Оси по меньшей мере двух сателлитов могут быть выполнены в виде неподвижных относительно водила направляющих стержней; толкатель может быть выполнен по меньшей мере из двух элементов, один из которых установлен неподвижно относительно трансмиссии, а другой связан с выходным элементом трансмиссии с возможностью вращения и имеет направляющие пазы для взаимодействия с неподвижными направляющими стержнями.
Кроме того, двигатель с трансмиссией и системой управления поворотом лопастей могут быть установлены на основании, которое может иметь направляющие выступы, а неподвижный элемент толкателя может иметь направляющие пазы для взаимодействия с направляющими выступами основания.
Кроме того, воздушный винт может иметь кок-обтекатель ступицы, неподвижно закрепленный на выходном валу двигателя с возможностью фрикционного взаимодействия с внешним стартером.
Кроме того, лопасти воздушного винта могут быть установлены на вилках поворотных втулок и могут быть выполнены складными с возможностью раскрытия лопастей под действием центробежной силы.
Кроме того, каждая лопасть может быть закреплена на соответствующей поворотной втулке через виброизолирующую втулку.
Кроме того, ступица может содержать регулировочные винты-упоры большого и малого шага воздушного винта.
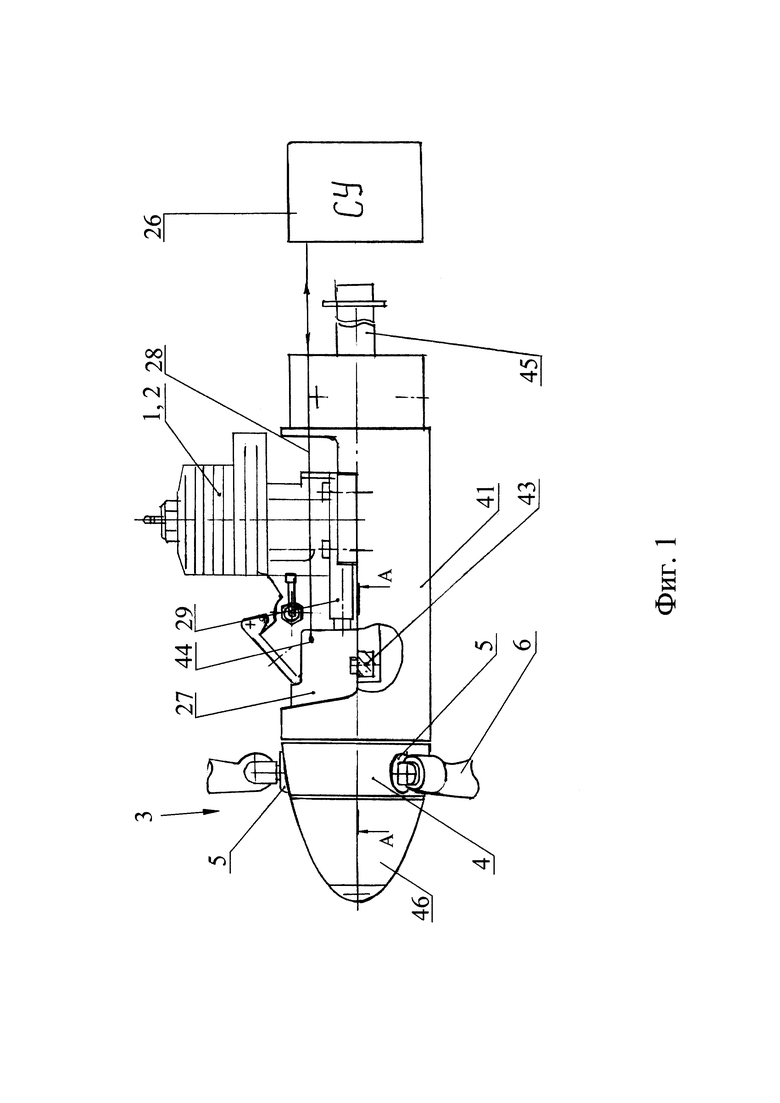
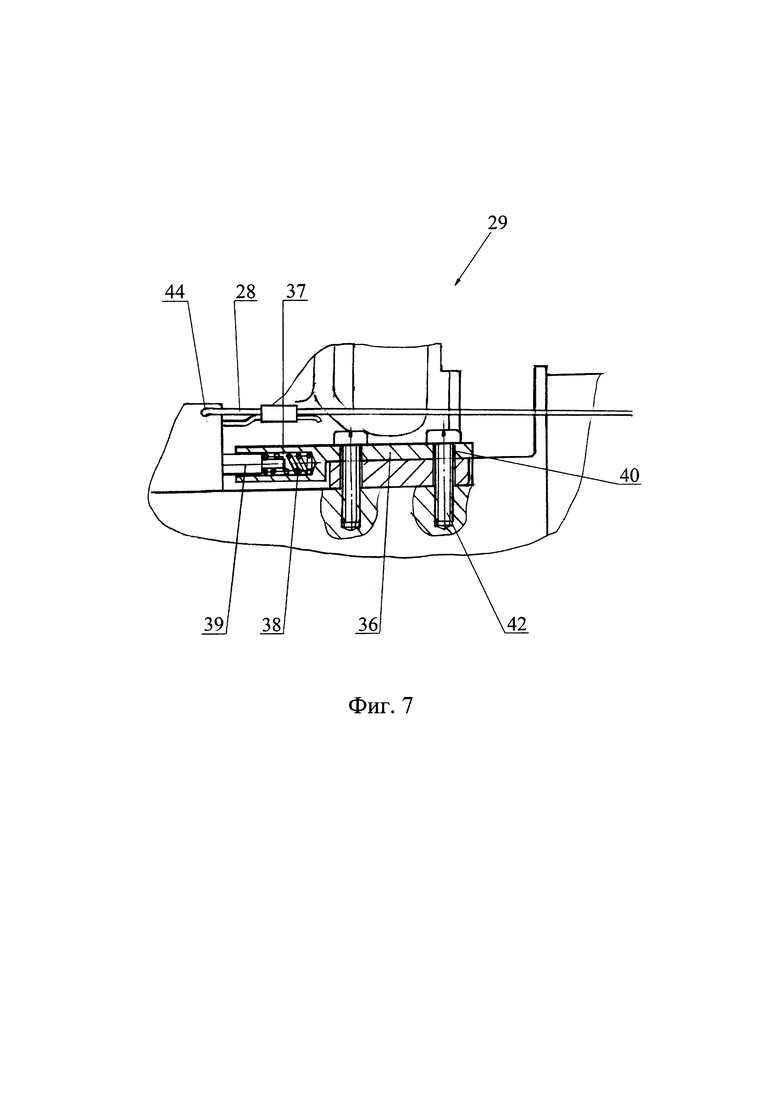
Изобретение поясняется чертежами, где на фиг. 1 показан общий вид ВМУ согласно одному из вариантов осуществления настоящего изобретения; на фиг. 2 показан разрез А-А на фиг. 1; на фиг. 3 показано водило редуктора в разрезе согласно одному из вариантов осуществления настоящего изобретения; на фиг. 4 показан толкатель кривошипа поворотной втулки в разрезе согласно одному из вариантов осуществления настоящего изобретения; на фиг. 5 показана ступица ВИШ с поворотными втулками лопастей винта; на фиг. 6 показана поворотная втулка лопасти винта с кривошипом согласно одному из вариантов осуществления настоящего изобретения; на фиг. 7 показан привод толкателя в разрезе согласно одному из вариантов осуществления настоящего изобретения.
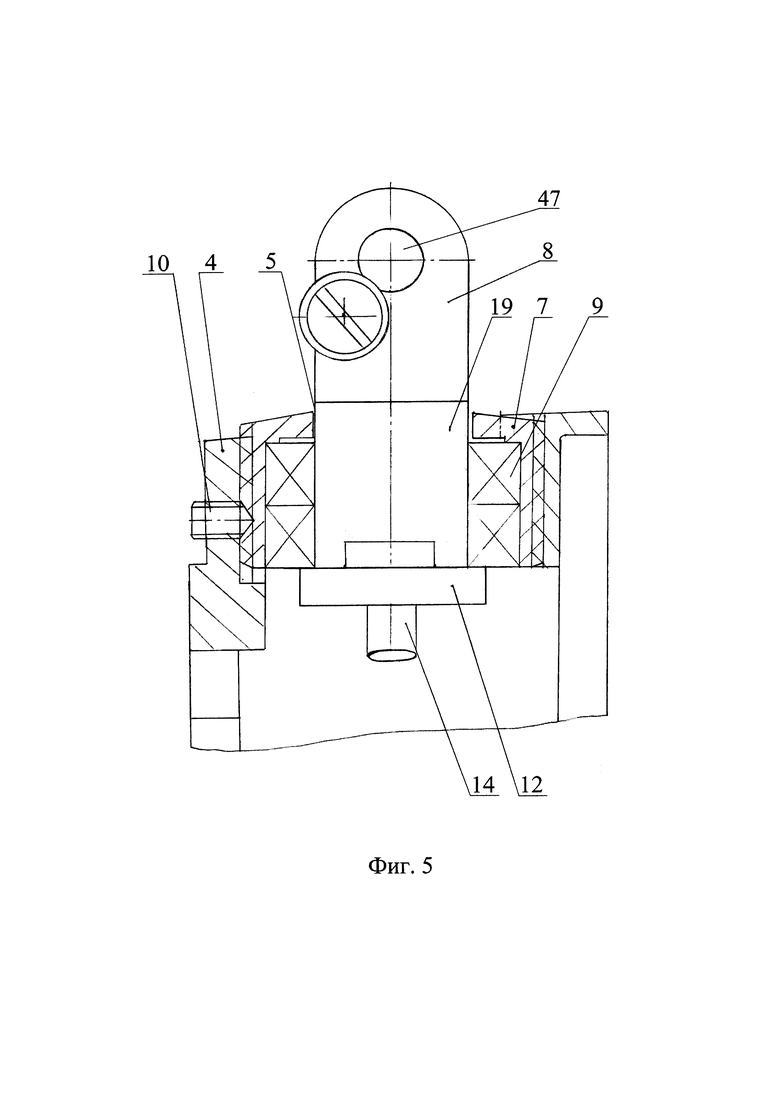
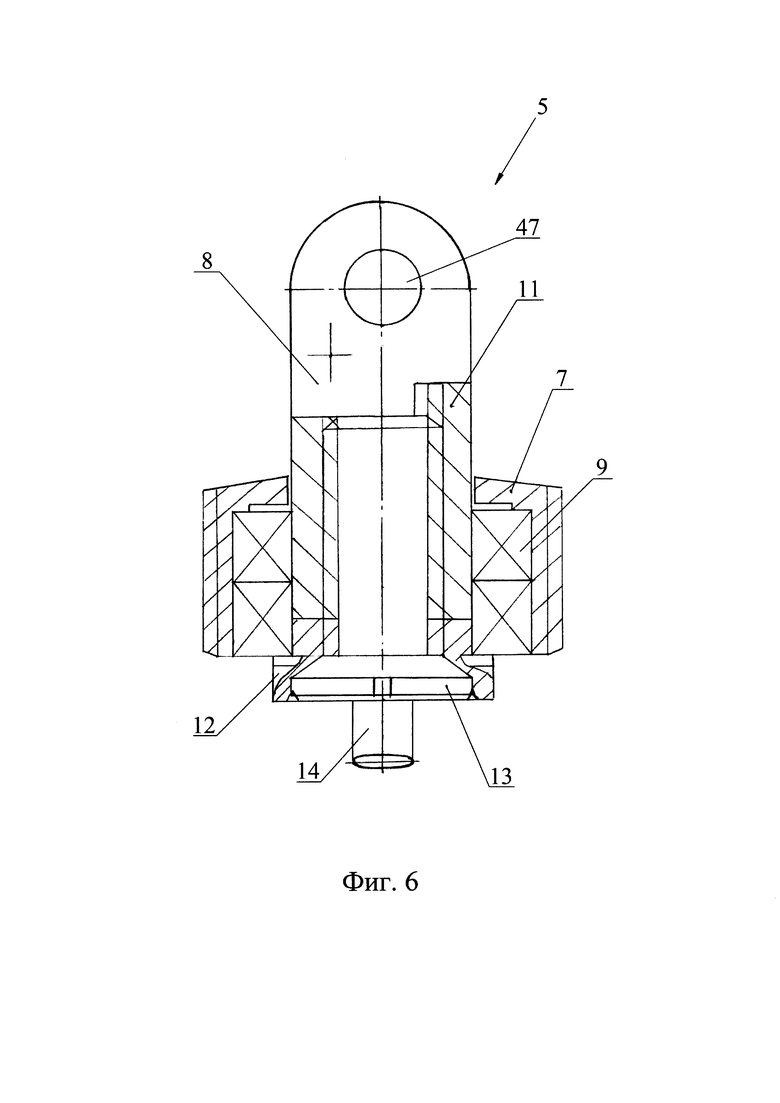
Винтомоторная установка (ВМУ) для малоразмерного летательного аппарата содержит поршневой двигатель 1 внутреннего сгорания (ДВС) с трансмиссией, представляющей собой одноступенчатый планетарный редуктор 2, связанный посредством водила, разъемно соединенного со ступицей посредством торцевого шлицевого и резьбового соединения, с воздушным винтом 3, выполненным с изменяемым шагом (ВИШ) (фиг. 1). Воздушный винт 3 изменяемого шага включает ступицу 4, на которой установлены посредством резьбового соединения поворотные втулки 5 с закрепленными на них лопастями 6. Каждая поворотная втулка 5 включает в себя корпус 7 с наружной резьбой, а также вилку 8 крепления лопасти 6, соединенную с корпусом 7 посредством шариковых подшипников 9, обеспечивающих возможность поворота лопасти 6 относительно корпуса 7 с минимальными потерями на трение (фиг. 5, 6). Наружная резьба корпуса 7 соединена с внутренней резьбой ступицы 4 и зафиксирована стопорным винтом 10. Вилка 8 крепления лопасти 6 имеет элемент 11 крепления лопасти 6 и кривошип 12, неподвижно соединенный с элементом 11 посредством резьбового элемента 13, при этом кривошип 12 имеет выполненный заодно целое с ним палец 14 (фиг. 5, 6). Лопасти 6 установлены на поворотных втулках 5 с возможностью поворота вокруг своих осей и связаны посредством кривошипов с системой управления поворотом лопастей с возможностью изменения угла установки лопастей 6 в соответствии с законом изменения скорости подъема летательного аппарата (ЛА) с обеспечением постоянного угла атаки элементов лопастей 6. Изменение угла установки лопастей 6 (поворот) обеспечивается благодаря взаимодействию кривошипов 12 с системой управления поворотом лопастей 6. Лопасти 6 воздушного винта 3 установлены на осях 47 поворотных втулок 5 и выполнены складными с возможностью раскрытия лопастей 6 под действием центробежной силы. Лопасти 6 воздушного винта 3 содержат упругие виброизолирующие втулки (не показаны), взаимодействующие с осями 47 подвески лопастей 6.
Складывание лопастей 6 конструктивно обеспечивается раздельным выполнением лопасти 6 и поворотной втулки 5, имеющей вилку 8 для подвески лопасти 6. В комлевой части лопасти 6 выполнено отверстие (не показано), расположенное перпендикулярно к оси лопасти 6 и обеспечивающее возможность складывания лопасти 6 вдоль фюзеляжа ЛА набегающим потоком воздуха. В отверстии в комлевой части лопасти 6 установлена упругая, например, полиуретановая втулка (не показана), имеющая осевое отверстие меньшего диаметра, в которое вставляется ось 47 подвески лопасти 6. В ушках вилки 8 поворотной втулки 5 выполнены отверстия, в которые вставляется ось 47 подвески лопасти 6. Крепление лопасти 6 к вилке 8 поворотной втулки 5 осуществляется посредством оси 47 подвески лопасти 6, проходящей сквозь упругую втулку в комлевой части лопасти 6. Ось 47 подвески лопасти 6 упруго взаимодействует с упругой виброизолирующей втулкой, установленной в комлевой части лопасти 6, сокращая уровень вибрации. В процессе эксплуатации ВМУ по мере износа виброизолирующие втулки в комлевой части лопасти 6 могут быть заменены.
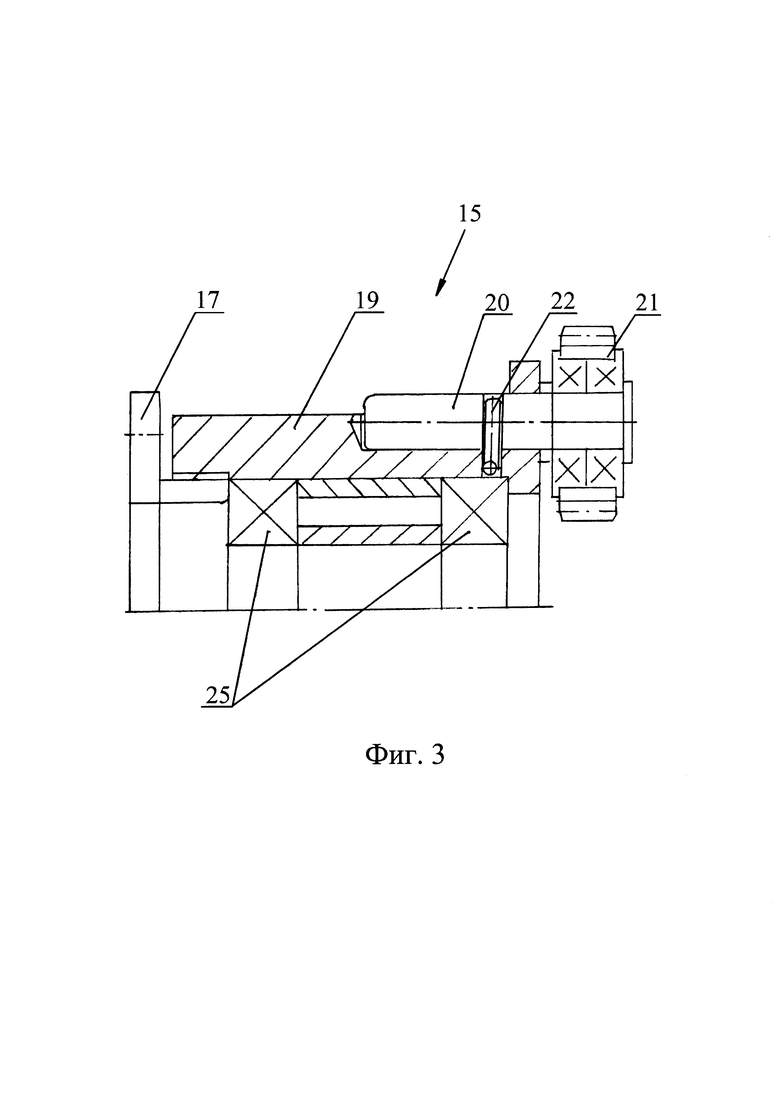
Планетарный редуктор 2 выполнен по схеме с остановленным венцом внутреннего зацепления с малым значением модуля, обеспечивающим уменьшение габаритных размеров и массы такого редуктора 2. Планетарный редуктор 2 имеет водило 15 (фиг. 3), неподвижно соединенное со ступицей 4 воздушного винта 3 изменяемого шага, при этом водило 15 соединено со ступицей 4 с возможностью съема (разъемное соединение). Разъемное соединение водила 15 со ступицей 4 обеспечивается посредством торцевого шлицевого соединения 16, обеспечивающего передачу крутящего момента от водила 15 к ступице 4. Крепление водила 15 к ступице 4 осуществляется резьбовым элементом 17, зафиксированным стопорным винтом 18, выполняющим также функцию ограничения поворота вилки 8 поворотной втулки 5 (фиг. 2, 3). Разъемное соединение водила 15 планетарного редуктора со ступицей 4 воздушного винта 3 - это условие сборки механизма, что позволяет заменить, например, двухлопастную ступицу на трехлопастную или четырехлопастную, а также изготовить эти сложные детали в отдельности с их последующим соединением.
Водило 15 планетарного редуктора 2 (фиг. 3) включает в себя корпус 19, установленные на удлиненных осях 20 сателлиты 21 в количестве, обеспечивающем минимальную виброактивность редуктора 2. Оси 20 сателлитов 21 неподвижно закреплены на корпусе 19 фиксатором 22, при этом цилиндрические поверхности осей 20 частично выступают над цилиндрической поверхностью корпуса 19, образуя неподвижные относительно водила 15 направляющие стержни, взаимодействующие с одним из элементов системы управления поворотом лопастей 6 (подвижным элементом 30). Сателлиты 21 посредством зубьев соединены с солнечной шестерней (не показана), неподвижно установленной на валу ДВС 1, а также находятся в зацеплении с зубьями внутреннего зацепления неподвижного венца.
ДВС 1 имеет удлиненную выходную часть выходного коленчатого вала 23, предназначенную для размещения на ней водила 15 планетарного редуктора 2, при этом на элементе ДВС 1 (переднем по полету элементе картера ДВС) неподвижно закреплен зубчатый венец 24 с зубьями внутреннего зацепления планетарного редуктора 2. Наружная поверхность зубчатого венца 24 выполнена цилиндрической формы для обеспечения сопряжения с одним из элементов системы управления поворотом лопастей 6 по внутренней цилиндрической поверхности неподвижного элемента 31.
Водило 15 планетарного редуктора соединено с валом 23 ДВС 1 посредством двух шариковых подшипников 25, обеспечивающих вращение вала 23 ДВС 1 и водила 15 с разными угловыми скоростями. Осевое перемещение водила 15 относительно вала 23 ДВС 1 исключается резьбовым элементом 17.
Водило 15 планетарного редуктора 2 взаимодействует с солнечной шестерней, разъемно соединенной с тормозным барабаном (не показан), который неподвижно соединен с выходным валом 23 двигателя 1. Разъемное соединение солнечной шестерни с тормозным барабаном позволяет, заменяя солнечную шестерню и сателлиты 21, изменять передаточное отношение редуктора 2.
Система управления поворотом лопастей 6 содержит механизм поворота лопастей 6, а также связанный с ним блок 26 управления. При этом механизм поворота лопастей 6 включает толкатель 27 (фиг. 4), связанный с блоком 26 управления посредством тяги 28, а также привод 29 толкателя 27 (фиг. 7).
Толкатель 27 выполнен из двух (или более) элементов 30, 31 (фиг. 4), соединенных между собой посредством шарикового подшипника 32, обеспечивающего вращение элемента 30 (подвижный элемент) относительно элемента 31 (неподвижный элемент) без взаимного осевого смещения элементов 30 и 31. Подвижный элемент 30 (соединенный с внутренним кольцом подшипника 32) на наружной своей поверхности имеет сквозные поперечные отверстия 33 (пазы), предназначенные для установки в них (для сопряжения) пальцев 14 кривошипов 12 поворотных втулок 5 для осуществления поворота вилки 8 с закрепленной на ней лопастью 6 относительно ступицы 4. При этом подвижный элемент 30 на внутренней своей поверхности имеет продольные направляющие пазы 34, предназначенные для сопряжения (взаимодействия) подвижного элемента 30 толкателя 27 с неподвижными направляющими стержнями (осями 20), обеспечивая продольное перемещение подвижного элемента 30 по осям 20 сателлитов 21, одновременно исключая вращение подвижного элемента 30 относительно водила 15. Подвижный элемент 30 связан с выходным элементом редуктора 2 с возможностью вращения. Неподвижный элемент 31 (соединенный с внешним кольцом подшипника 32) установлен неподвижно относительно редуктора 2 (с исключением вращения относительно трансмиссии) и имеет на наружной своей поверхности сквозные прямоугольные направляющие пазы 35, обеспечивающие продольное перемещение толкателя 27 по выступам 43, образованным на внутренней поверхности основания 41. Также неподвижный элемент 31 имеет отверстие 44 крепления тяги 28 привода ВИШ (блока 26 управления).
Привод 29 толкателя 27 включает в себя корпус 36, в продольном отверстии 37 которого размещен упругий элемент 38, выполненный, например, в виде пружины (пружин), взаимодействующей с упором 39 толкателя 27 и предназначенной для продольного перемещения толкателя 27 (вдоль своей оси) с возможностью управления шагом воздушного винта 3 (фиг. 7). Сжатая пружина, разжимаясь, обеспечивает через упор 39 продольное перемещение толкателя 27. В корпусе 36 выполнены отверстия 40 для крепления толкателя 27 на основании 41 одновременно с ДВС 1 крепежными элементами 42. Привод 29 толкателя 27 устанавливается неподвижно на элементах крепления ДВС 1 таким образом, чтобы сжатые пружины 38 через упоры 39 отжимали толкатель 27 в крайнее переднее положение в составе собранной ВМУ, обеспечивая основную функцию поворота поворотных втулок 5 с установленными на них лопастями 6 и функцию устранения люфтов и зазоров в соединениях элементов ВМУ, нарушающих работу ВИШ.
Винтомоторная установка в вариантном исполнении изобретения имеет основание 41, на котором установлены двигатель 1 с его системой питания 45, трансмиссия и система управления поворотом лопастей 6. В данном случае основание 41 имеет направляющие выступы 43, взаимодействующие своими наружными плоскими поверхностями с направляющими пазами 35 неподвижного элемента 31 толкателя 27, обеспечивающие продольное перемещение толкателя 27 относительно выступов 43 основания 41 и исключающие вращение (проворот вокруг своей оси) элемента 31 относительно основания 41. Основание 41 своим внутренним диаметром охватывает толкатель 27 с зазором, обеспечивающим продольное перемещение толкателя 27 и исключающим люфт в соединении. Толкатель 27 установлен в основании 41 вместе с установленным на нем ДВС 1 с трансмиссией с обеспечением продольного перемещения по основанию 41 толкателя 27. При этом обеспечивается разъемное соединение всех элементов ВМУ. Выступы 43 совместно с другими выступами (не показаны) также используются для разъемного крепления на основании 41 ДВС 1 с редуктором 2.
Воздушный винт 3 имеет кок-обтекатель 46 ступицы 4, неподвижно закрепленный на выходном валу 23 двигателя 1 с возможностью фрикционного взаимодействия с внешним стартером.
Ступица 4 содержит регулировочные винты-упоры (не показаны) большого и малого шага воздушного винта 3. Отворачивание резьбового элемента крепления ступицы 4 исключается винтами-упорами большого и малого шага воздушного винта 3. Постоянство угла атаки элементов лопастей 6 воздушного винта 3 изменяемого шага обеспечивается отклонением управляющего элемента блока 26 управления, соединенного с тягой 28.
Масса созданной ВМУ составляет 330 г, что позволяет использовать ее в составе таймерной модели суммарной массой не менее 750 г; эксплуатация созданной ВМУ не отличается от эксплуатации применяемых ВМУ.
Работает ВМУ следующим образом.
Управление ВМУ системой управления ВИШ осуществляется посредством тяги 28, одним концом соединенной с отверстием 44 элемента 31 толкателя 27, а другим концом соединенной с рычагом системы управления (СУ) ВИШ. В начальное (стартовое) положение ВИШ взводится СУ перемещением рычага управления, соединенного тягой 28 с толкателем 27, при этом толкатель 27 сжимает пружины 38 привода 29 толкателя 27 и разворачивает поворотные втулки 5 лопастей 6 ВИШ в начальное (стартовое) положение.
В таком положении ВМУ находится до момента старта.
После принятия решения о старте спортсмен запускает ДВС 1 и выпускает модель, отпуская кнопку пуска СУ. Система управления обеспечивает отклонение рычага по заданной программе, рычаг по программе постепенно отпускает тягу 28, а пружины 38 выталкивают толкатель 27, обеспечивая определенное программой управления осевое перемещение толкателя 27, который взаимодействует с пальцами 14 кривошипов 12 поворотных втулок 5 и поворачивает лопасти 6 ВИШ по заданной программе. Программа управления обеспечивает изменение угла наклона лопастей 6 ВИШ в соответствии с законом увеличения скорости подъема модели, обеспечивая оптимальный угол атаки в каждом поперечном сечении лопасти 6, КПД винта и максимальную скорость разгона и высоту подъема модели.
По окончании программы управления ВИШ ДВС 1 останавливается по команде СУ, лопасти 6 винта возвращаются в стартовое угловое положение и складываются под воздействием набегающего потока, обеспечивая снижение силы сопротивления модели при планировании и исключая поломки лопастей 6 при посадке модели.
Изобретение не ограничено описанным вариантом осуществления.
Например, число лопастей ВИШ может быть другим (два, четыре и др.), передаточное отношение редуктора, выбранное как 1:4, может быть иным, а также может быть иным и количество сателлитов 21 редуктора 2, осей и их крепления, других элементов и их конструктивного исполнения.
Хотя настоящее изобретение было описано на его исполненном предпочтительном варианте, следует понимать, что различные модификации и изменения могут быть выполнены без отступления от заявленного объема изобретения. Например, может отсутствовать основание 41 или реализована его модификация без охватывающего элемента. Например, использована иная кинематическая схема редуктора 2. Например, иное, в том числе упругое, соединение водила 15 редуктора 2 и ступицы 4 воздушного винта 3. Например, иной привод 29 толкателя 27. Например, другая конструкция ДВС 1.
Таким образом, благодаря выполнению ВМУ в предложенном виде, обеспечивается возможность изменения угла установки (наклона) лопастей 6 в зависимости от изменения скорости подъема летательного аппарата (в соответствии с законом роста скорости модели), обеспечивается постоянный угол атаки в каждом поперечном сечении каждой лопасти 6 для реализации максимального значения аэродинамической силы и силы тяги воздушного винта, обеспечивается снижение вибрации ВМУ, обеспечиваются высокие массо-центровочные характеристики ВМУ, эксплуатационные характеристики ВМУ для использования в составе моделей класса F1C для участия в соревнованиях и для других примеров использования ВМУ в малоразмерных ЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАРОДНЫЙ ВЕРТОЛЕТ 21 ВЕКА КАН 21 (ВАРИАНТЫ) | 2007 |
|
RU2364550C2 |
| СИЛОВАЯ УСТАНОВКА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРОВАННЫМ УПРАВЛЕНИЕМ (ВАРИАНТЫ) | 2023 |
|
RU2820238C1 |
| УНИВЕРСАЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КВАДРОКОПТЕРНОГО ТИПА | 2024 |
|
RU2835704C1 |
| САМОЛЕТ | 2014 |
|
RU2569165C1 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| РОТОР "ВОЗДУШНОЕ КОЛЕСО". ГИРОСТАБИЛИЗИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА, ИСПОЛЬЗУЮЩИЕ РОТОР "ВОЗДУШНОЕ КОЛЕСО", НАЗЕМНОЕ/ПАЛУБНОЕ УСТРОЙСТВО ИХ ЗАПУСКА | 2013 |
|
RU2538737C9 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2019 |
|
RU2708516C1 |
| ПРОПУЛЬСИВНЫЙ КОМПЛЕКС ТОРПЕДЫ, СПОСОБ РАБОТЫ И ВАРИАНТЫ ДВИЖИТЕЛЯ | 2020 |
|
RU2757339C1 |
| Устройство сверхлегкого складного автожира | 2017 |
|
RU2659716C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652863C1 |


Изобретение относится к винтомоторным установкам моделей самолетов. Винтомоторная установка содержит двигатель с трансмиссией, связанной с воздушным винтом, имеющим лопасти, установленные с возможностью поворота вокруг своих осей и связанные с системой управления поворотом лопастей с возможностью изменения угла установки лопастей с обеспечением постоянного угла атаки в каждом поперечном сечении каждой лопасти. Воздушный винт включает ступицу с установленными на ней поворотными втулками, на которых закреплены лопасти. Каждая поворотная втулка имеет кривошип, связанный с системой управления поворотом лопастей. Изобретение направлено на обеспечение максимального значения силы тяги воздушного винта. 13 з.п. ф-лы, 7 ил.
1. Винтомоторная установка, содержащая двигатель с трансмиссией, связанной с воздушным винтом, имеющим лопасти, установленные с возможностью поворота вокруг своих осей и связанные с системой управления поворотом лопастей с возможностью изменения угла установки лопастей с обеспечением постоянного угла атаки в каждом поперечном сечении каждой лопасти, отличающаяся тем, что воздушный винт включает ступицу с установленными на ней поворотными втулками, на которых закреплены лопасти, при этом каждая поворотная втулка имеет кривошип, связанный с системой управления поворотом лопастей.
2. Установка по п. 1, отличающаяся тем, что система управления поворотом лопастей включает механизм поворота лопастей, связанный с кривошипами поворотных втулок, а также блок управления, связанный с механизмом поворота лопастей.
3. Установка по п. 2, отличающаяся тем, что механизм поворота лопастей включает толкатель, связанный с кривошипами поворотных втулок и с блоком управления, а также привод толкателя.
4. Установка по п. 3, отличающаяся тем, что привод толкателя включает упругие элементы для продольного перемещения толкателя с возможностью воздействия на поворотные втулки и управления шагом воздушного винта.
5. Установка по п. 3, отличающаяся тем, что блок управления связан с толкателем посредством тяги.
6. Установка по п. 1, отличающаяся тем, что трансмиссия представляет собой планетарный редуктор, имеющий водило, разъемно соединенное со ступицей.
7. Установка по п. 6, отличающаяся тем, что разъемное соединение водила со ступицей выполнено посредством торцевого шлицевого и резьбового соединения.
8. Установка по п. 6, отличающаяся тем, что водило планетарного редуктора имеет по меньшей мере два сателлита, установленные на осях и находящиеся в зацеплении с солнечной шестерней, разъемно соединенной с тормозным барабаном, который неподвижно соединен с выходным валом двигателя.
9. Установка по п. 8, отличающаяся тем, что оси по меньшей мере двух сателлитов выполнены в виде неподвижных относительно водила направляющих стержней, толкатель выполнен по меньшей мере из двух элементов, один из которых установлен неподвижно относительно трансмиссии, а другой связан с выходным элементом трансмиссии с возможностью вращения и имеет направляющие пазы для взаимодействия с неподвижными направляющими стержнями.
10. Установка по п. 9, отличающаяся тем, что двигатель с трансмиссией и системой управления поворотом лопастей установлены на основании, которое имеет направляющие выступы, а неподвижный элемент толкателя имеет направляющие пазы для взаимодействия с направляющими выступами основания.
11. Установка по п. 8, отличающаяся тем, что воздушный винт имеет кок-обтекатель ступицы, неподвижно закрепленный на выходном валу двигателя с возможностью фрикционного взаимодействия с внешним стартером.
12. Установка по п. 1, отличающаяся тем, что лопасти воздушного винта установлены на вилках поворотных втулок и выполнены складными с возможностью раскрытия лопастей под действием центробежной силы.
13. Установка по п. 1, отличающаяся тем, что каждая лопасть закреплена на соответствующей поворотной втулке через виброизолирующую втулку.
14. Установка по п. 1, отличающаяся тем, что ступица содержит регулировочные винты-упоры большого и малого шага воздушного винта.
| СПОСОБ ВЫБОРА АБОНЕНТОМ СИГНАЛА КОНТРОЛЯ ВЫЗОВА В СЕТИ МОБИЛЬНОЙ СВЯЗИ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ ЗАПИСИ | 2008 |
|
RU2384966C2 |
| JP 6247392 A, 06.09.1994 | |||
| SU 5470 A1, 31.05.1928. | |||

