Изобретение относится к области силовых установок летательных аппаратов, конкретнее к области силовых установок летательных аппаратов с одним несущим воздушным винтом.
Известны способ и система, которые могут быть использованы при авиационных перевозках крупногабаритных грузов, при строительстве крупных промышленных объектов и в военно-транспортной авиации. Винтомоторная система представляет собой несущую конструкцию, состоящую из балок, связанных в единую решетчатую поверхность. Винтомоторные агрегаты расположены в узлах крепления и размещены по всей поверхности конструкции, которая может иметь выпуклую, вогнутую или плоскую форму и произвольную конфигурацию, а количество поверхностей, на которых размещены винтомоторные агрегаты может быть от 1 до 10. Груз с помощью узла фиксации и скольжения подвешивается на стропах, которые шарнирно соединены с балками. Результирующую силу подъема Рпод, образованную суммой элементарных составляющих сил, производимых винтомоторными агрегатами выбирают в пределах I ≤ (Pпод + Pгр) : Pгр ≤ 100, где Pгр - вес груза. Перемещение груза осуществляют изменением угла между Рпод и Pгр. Все это позволяет повысить весовую отдачу системы и производить перемещение значительных по массе грузов [патент РФ №2159197, B64D 09/00, опубл. 20.11.2000].
Недостатками аналога являются высокая масса, обусловленная наличием несущей конструкции из балок, и невысокая эффективность, обусловленная наличием нескольких винтомоторных агрегатов.
Известно изобретение, которое относится к области авиационной техники. Самолет содержит крыло, два соосных несущих воздушных винта противоположного направления вращения с автоматами перекоса. Ось вала каждого винта установлена с возможностью поворота вперед в плоскости оси симметрии самолета на угол, отсчитываемый от вертикального положения и определяемый по формуле, приведенной в описании. Центр вращения оси совпадает с центром тяжести самолета. Диаметр несущих винтов соответствует нагрузке на сметаемую площадь не выше 140...150 Па. Крыло выполнено поворотным относительно поперечной оси его профиля и может устанавливаться с требуемым углом атаки или флюгероваться [патент №2324626, B64C 29/00, B64C 27/52, опубл. 20.05.2008].
Недостатками аналога являются высокие масса и габариты, обусловленные наличием двух соосных воздушных винтов, и невысокая эффективность, обусловленная наличием нескольких винтомоторных агрегатов.
Известна силовая установка (СУ) для летательных аппаратов, которая предназначена для применения на легких летательных аппаратах вертикального взлета и посадки (СВВП), с целью получения дополнительной мощности и тяги для обеспечения вертикальных режимов полета. Основное преимущество предлагаемой СУ, в сравнении с аналогами, состоит в том, что в агрегате вертикальной тяги на выходном валу мультипликатора установлен маховик, а на входном валу воздушный винт, создающий вертикальную тягу, который через управляемую муфту связан с валом отбора мощности подъемно-маршевого двигателя. Благодаря такой конструкции для получения недостающей мощности и тяги агрегатов, обеспечивающих вертикальные режимы полета легкого СВВП, перед взлетом или посадкой маховики раскручиваются от подъемно-маршевого двигателя, накапливая при этом необходимый запас энергии, а затем высвобождают ее для вращения винтов вертикальной тяги за время цикла взлета или посадки [патент №93776, B64D 27/00, опубл. 10.05.2010].
Недостатками аналога являются невысокая эффективность, обусловленная наличием мультипликатора, и, соответственно, имеющимися в нём механическими потерями, высокие масса и габариты, обусловленные многокомпонентностью системы.
Известно изобретение, которое относится к области авиации, в частности к конструкциям силовых установок скоростных и беспилотных вертолетов. Силовая установка вертолета одновинтовой схемы содержит двигатели, снабженные газогенераторными блоками, свободную турбину. Газогенераторные блоки двигателей соединены с эжектором первой ступени, переходящим в закрепленный на фюзеляже кольцевой торообразный ресивер, по бокам от которого находятся перепускные клапаны. Над ресивером располагается кольцевое перекрывное устройство воздуховода свободной турбины. Свободная турбина содержит вентилятор, имеющий общий вал с несущим винтом. Регулируемое сопло эжектора второй ступени переходит к реактивному соплу и газодинамическим рулям поворота в хвостовой части фюзеляжа. В центральной части фюзеляжа закреплены электрогенератор, гидронасос и коробка приводов. Спереди и сзади относительно кольцевого ресивера расположены теплообменник маслосистемы двигателя и теплообменник маслосистемы свободной турбины соответственно, каждый из которых связан с продувными каналами [патент №2764860, F02C 3/10, B64C 27/06, B64C 27/12, опубл. 21.01.2022].
Недостатками аналога являются высокие массы и габариты, обусловленные наличием нескольких двигателей, и невысокое быстродействие, обусловленное сложностью системы управления.
Известна силовая установка, которая содержит двигатель с выходным валом и редуктор двигателя с выходным звеном, связанный с воздушным винтом 4. Редуктор двигателя 1 расположен соосно выходному валу 2 двигателя 1. Выходное звено 3 редуктора установлено коаксиально выходному валу 2 двигателя 1 непосредственно на выходном валу двигателя 1 с возможностью свободного вращения относительно него на подшипниках 5 и зафиксировано в осевом направлении. Воздушный винт 4 установлен на выходном звене редуктора. Выходное звено редуктора установлено с возможностью передачи тяги от воздушного винта 4 непосредственно на выходной вал 2 двигателя 1. Маховик 6 установлен, закреплен и зафиксирован в осевом направлении непосредственно на выходном валу 2 двигателя 1. Маховик 6 вынесен за плоскость вращения воздушного винта 4 силовой установки по отношению к двигателю 1. Лопасти воздушного винта 4 могут быть установлены с возможностью отклонения как в плоскости вращения воздушного винта 4, так и в направлении действия силы тяги. В последнем случае они установлены на серьгах, установленных на выходном звене 3 редуктора с возможностью отклонения в плоскости вращения воздушного винта [патент №2042580, B64D 35/00, B63H 19/00, опубл. 27.08.1995].
Недостатками аналога являются невысокая надёжность, обусловленная многокомпонентностью системы, и невысокая эффективность, обусловленная наличием редуктора, и, соответственно, имеющимися в нём механическими потерями.
Известна силовая установка с изменяемым вектором тяги, которая включает моторную раму, двигатель, связанный с ним через трансмиссию движитель и привод его поворота. Трансмиссия состоит из вала, размещенного в балке и связывающего двигатель с входным валом редуктора движителя. Все элементы силовой установки размещены на единой моторной раме. Балка выполнена поворотной относительно оси вала трансмиссии, при этом обдуваемая часть балки в поперечном сечении имеет симметричный обтекаемый профиль и сечение ориентировано всегда по потоку воздушного винта при любом угле поворота. Силовая установка может иметь два двигателя, каждый из которых связан через свою дополнительную трансмиссию с общим валом, может быть снабжена вторым движителем, установленным справа или слева от двигателей, причем каждый движитель связан со своим редуктором поворотной балкой. Движители могут быть выполнены в виде соосных винтов, соединенных через Т-образный редуктор с валом, размещенным в поворотной балке [патент №2536421, B64C 27/28, B64B 1/34, опубл. 20.12.2014].
Недостатками аналога являются невысокая надёжность, обусловленная наличием трансмиссии, и высокие масса и габариты, обусловленные наличием нескольких движителей.
Задача и технический результат изобретения - расширение функциональных возможностей силовой установки беспилотного летательного аппарата за счёт изменения направления вектора тяги.
Поставленная задача решается, а технический результат достигается тем, что силовая установка беспилотного летательного аппарата с интегрированным управлением по варианту 1 содержит электродвигатель, соединенный посредством цанги со ступицей, на которой установлены две лопасти посредством креплений с возможностью поворота последних относительно ступицы, регулятор оборотов электродвигателя, соединенный с мультиплексором.
Поставленная задача решается, а технический результат достигается тем, что силовая установка беспилотного летательного аппарата с интегрированным управлением по варианту 2 содержит электродвигатель с закрепленной на нем цангой, на которой установлены две лопасти посредством креплений с возможностью поворота последних относительно цанги, регулятор оборотов электродвигателя, соединенный с мультиплексором.
Технический результат изобретения достигается за счет того, что мультиплексор обрабатывает поступающие на него сигналы и формирует управляющий сигнал для регулятора оборотов таким образом, что он приводит во вращение электродвигатель с изменением в определенные участки времени углового ускорения, которое приводит к отклонению оси воздушного винта, образованного двумя лопастями, от оси ротора электродвигателя, что в свою очередь приводит к изменению направления вектора тяги силовой установки.
Сущность устройства поясняется чертежами, на которых представлена силовая установка беспилотного летательного аппарата с интегрированным управлением в общем виде.
На фиг. 1 - по варианту 1, на фиг. 2 - по варианту.
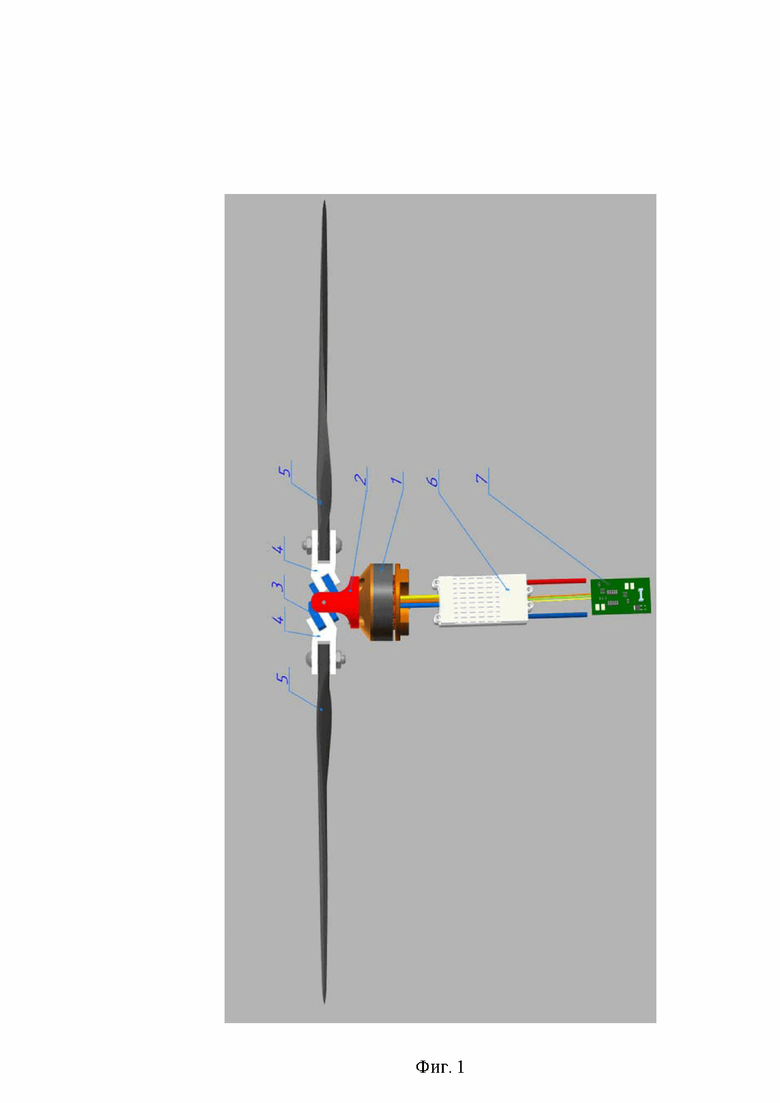
Силовая установка беспилотного летательного аппарата с интегрированным управлением по варианту 1 (фиг. 1) состоит из электродвигателя 1, цанги 2, ступицы 3, двух креплений 4, двух лопастей 5, регулятора оборотов 6, мультиплексора 7.
Силовая установка беспилотного летательного аппарата с интегрированным управлением по варианту 1 устроена следующим образом. Электродвигатель 1 содержит в себе датчик отслеживания положения ротора. На роторе электродвигателя 1 закреплена цанга 2 посредством резьбовых соединений, или посадки с натягом, или клеевого соединения. На цанге 2 закреплена ступица 3 за счет штифтового или резьбового соединения с возможностью поворота ступицы 3 на определенный угол относительно оси штифта или крепежного элемента. На ступице 3 установлены крепления 4 посредством штифтовых или резьбовых соединений с возможностью поворота креплений 4 на определенный угол относительно осей штифтов или крепежных элементов. Цанга 2, ступица 3, крепления 4 могут быть выполнены из металла, пластмассы или композитного материала. На креплениях 4 закреплены лопасти 5 за счет клепанных, или резьбовых, или клеевых соединений. Лопасти 5 могут быть выполнены из пластмассы, композитного материала или дерева. Регулятор оборотов 6 электрически соединен с электродвигателем 1. Мультиплексор 7 электрически соединен с регулятором оборотов 6.
Силовая установка беспилотного летательного аппарата с интегрированным управлением по варианту 1 функционирует следующим образом. На мультиплексор 7 поступают сигналы от внешнего управляющего устройства, которые задают уровень мощности, подаваемой на электродвигатель 1, управляющее воздействие по тангажу и управляющее воздействие по крену. От датчика положения ротора, содержащегося в электродвигателе 1, на мультиплексор поступает сигнал о положении ротора электродвигателя 1. Мультиплексор 7 с определенной частотой обрабатывает поступающие в него сигналы об уровне мощности, подаваемой на электродвигатель 1, об управляющем воздействии по крену, об управляющем воздействии по тангажу и о положении ротора электродвигателя 1. На основании поступающих сигналов мультиплексор 7 формирует выходной сигнал на регулятор оборотов 6, который на основании поступающего сигнала изменяет частоту вращения электродвигателя 1 и угловое ускорение ротора электродвигателя 1, получая при этом электроэнергию от аккумуляторной батареи или от источника питания. За счет изменения частоты вращения электродвигателя 1 происходит изменение тяги, развиваемой силовой установкой. За счет изменения углового ускорения электродвигателя 1 происходит поворот креплений 4 относительно ступицы 3, что вызывает изменение угла атаки лопастей 5, которое приводит к отклонению оси вращения воздушного винта, образованного двумя лопастями 5, относительно оси ротора электродвигателя 1 за счет поворота ступицы 3 относительно цанги 2. В результате этого происходит изменение направления вектора тяги силовой установки.
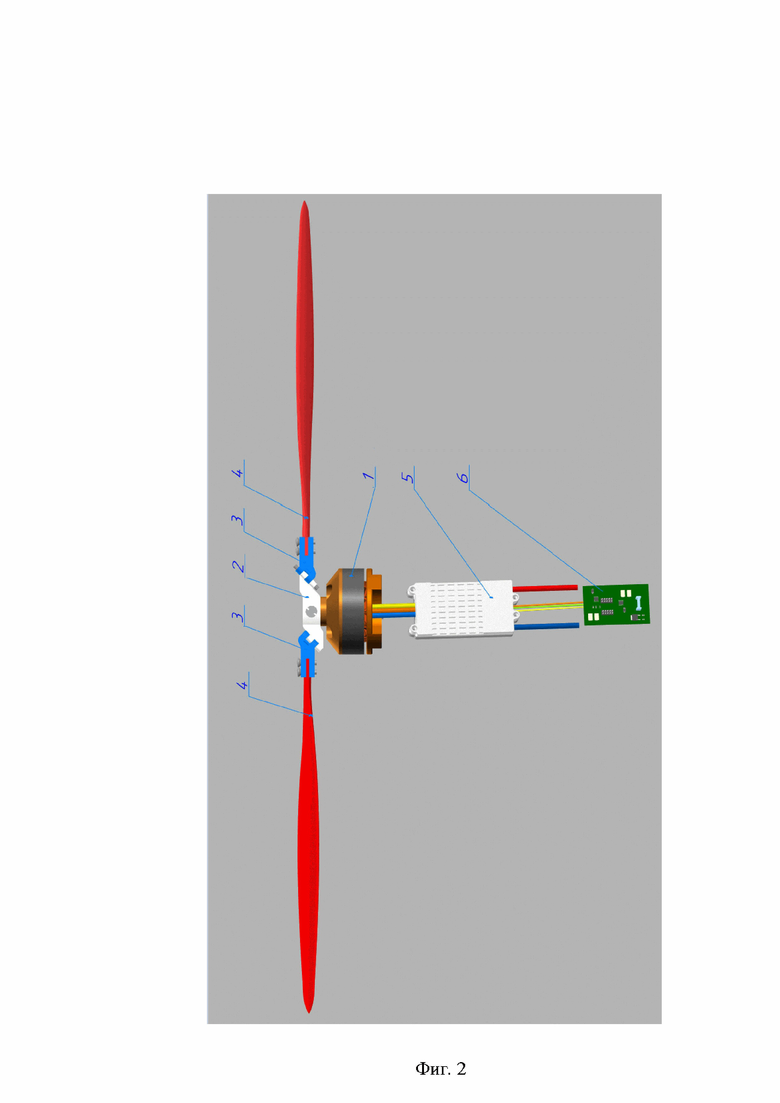
Силовая установка беспилотного летательного аппарата с интегрированным управлением по варианту 2 состоит из электродвигателя 1, цанги 2, двух креплений 3, двух лопастей 4, регулятора оборотов 5, мультиплексора 6.
Силовая установка беспилотного летательного аппарата с интегрированным управлением по варианту 2 устроена следующим образом. Электродвигатель 1 содержит в себе датчик отслеживания положения ротора. На роторе электродвигателя 1 закреплена цанга 2 посредством резьбовых соединений, или посадки с натягом, или клеевого соединения. Цанга 2 силовой установки беспилотного летательного аппарата с интегрированным управлением по варианту 2 представляет собой неподвижно соединенные цангу и ступицу силовой установки беспилотного летательного аппарата с интегрированным управлением по варианту 1. На цанге 2 установлены крепления 3 посредством штифтовых или резьбовых соединений с возможностью поворота креплений 3 на определенный угол относительно осей штифтов или крепежных элементов. Цанга 2 и крепления 3 могут быть выполнены из металла, пластмассы или композитного материала. На креплениях 3 закреплены лопасти 4 за счет штифтовых, клепанных, резьбовых или клеевых соединений. Лопасти 4 могут быть выполнены из пластмассы, композитного материала или дерева. Регулятор оборотов 5 электрически соединен с электродвигателем 1. Мультиплексор 6 электрически соединен с регулятором оборотов 5.
Силовая установка беспилотного летательного аппарата с интегрированным управлением по варианту 2 функционирует следующим образом. На мультиплексор 6 поступают сигналы от внешнего управляющего устройства, которые задают уровень мощности, подаваемой на электродвигатель 1, управляющее воздействие по тангажу и управляющее воздействие по крену. От датчика положения ротора, содержащегося в электродвигателе 1, на мультиплексор поступает сигнал о положении ротора электродвигателя 1. Мультиплексор 6 с определенной частотой обрабатывает поступающие в него сигналы об уровне мощности, подаваемой на электродвигатель 1, об управляющем воздействии по крену, об управляющем воздействии по тангажу и о положении ротора электродвигателя 1. На основании поступающих сигналов мультиплексор 6 формирует выходной сигнал на регулятор оборотов 5, который на основании поступающего сигнала изменяет частоту вращения электродвигателя 1 и угловое ускорение ротора электродвигателя 1, получая при этом электроэнергию от аккумуляторной батареи или от источника питания. За счет изменения частоты вращения электродвигателя 1 происходит изменение тяги, развиваемой силовой установкой. За счет изменения углового ускорения электродвигателя 1 происходит поворот креплений 3 относительно цанги 2, что вызывает изменение угла атаки лопастей 4. В результате этого происходит изменение направления вектора тяги силовой установки.
Таким образом, заявленное изобретение позволяет обеспечить расширение функциональных возможностей силовой установки беспилотного летательного аппарата за счёт изменения направления вектора тяги.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЛОРАЗМЕРНЫЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ БЕЗ АВТОМАТА ПЕРЕКОСА | 2023 |
|
RU2820276C1 |
| Автожир | 2018 |
|
RU2673933C1 |
| ЕДИНАЯ ТЕХНОЛОГИЯ ЭКСПЛУАТАЦИИ И ПРОИЗВОДСТВА ТРАНСПОРТНЫХ СРЕДСТВ "МАКСИНИО": ЭЛЕКТРОСАМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА-ПОСАДКИ (ВАРИАНТЫ), ЧАСТИ ЭЛЕКТРОСАМОЛЕТА И СПОСОБЫ ИСПОЛЬЗОВАНИЯ ЭЛЕКТРОСАМОЛЕТА И ЧАСТЕЙ ЭЛЕКТРОСАМОЛЕТА | 2010 |
|
RU2466908C2 |
| МАЛОРАЗМЕРНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТОЛЕТНОГО ТИПА | 2023 |
|
RU2802879C1 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |
| Система управления и передачи вращательного момента на винт(ы) в беспилотных летательных аппаратах (БПЛА), стартер-генератор, плата управления стартером-генератором и амортизатор для этой системы | 2020 |
|
RU2741136C1 |
| УНИВЕРСАЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КВАДРОКОПТЕРНОГО ТИПА | 2024 |
|
RU2835704C1 |
| Конвертоплан | 2024 |
|
RU2835584C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ И/ИЛИ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ С УКОРОЧЕННЫМ ПРОБЕГОМ | 2021 |
|
RU2764311C1 |
| Автожир двухроторный | 2024 |
|
RU2840414C1 |
Группа изобретений относится к двум вариантам силовой установки беспилотного летательного аппарата. По первому варианту силовая установка содержит электродвигатель, соединенный посредством цанги со ступицей, на которой установлены две лопасти посредством креплений с возможностью поворота последних относительно ступицы, регулятор оборотов электродвигателя, соединенный с мультиплексором. Силовая установка по второму варианту содержит электродвигатель с закрепленной на нем цангой, на которой установлены две лопасти посредством креплений с возможностью поворота последних относительно цанги, регулятор оборотов электродвигателя, соединенный с мультиплексором. Обеспечивается расширение функциональных возможностей силовой установки беспилотного летательного аппарата. 2 н.п. ф-лы, 2 ил.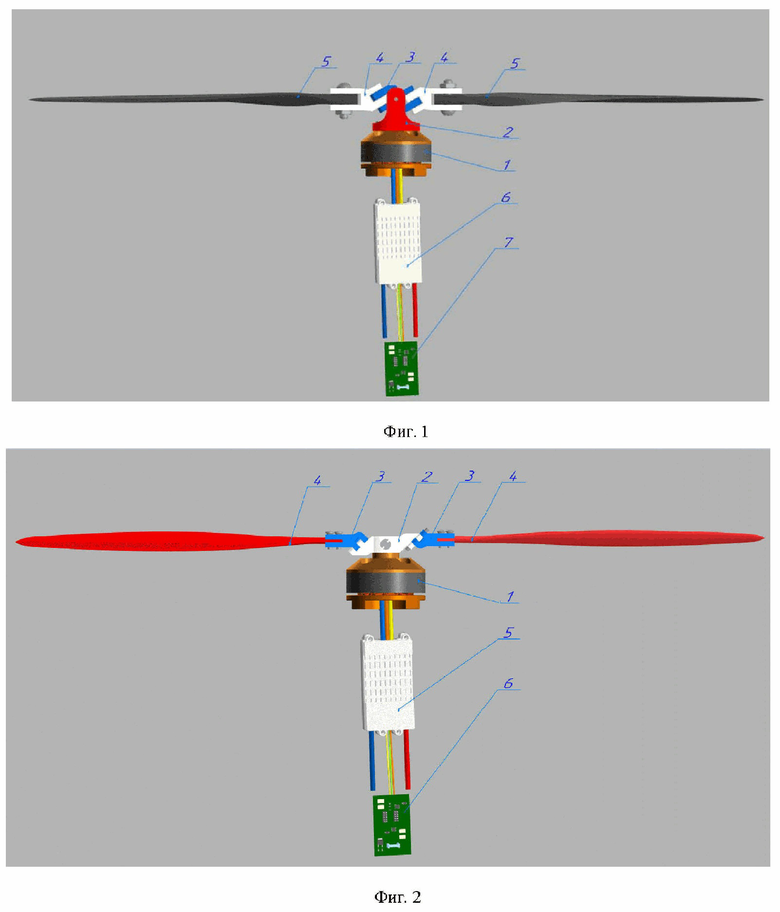
1. Силовая установка беспилотного летательного аппарата с интегрированным управлением, содержащая электродвигатель, соединенный посредством цанги со ступицей, на которой установлены две лопасти посредством креплений с возможностью поворота последних относительно ступицы, регулятор оборотов электродвигателя, соединенный с мультиплексором.
2. Силовая установка беспилотного летательного аппарата с интегрированным управлением, содержащая электродвигатель с закрепленной на нем цангой, на которой установлены две лопасти посредством креплений с возможностью поворота последних относительно цанги, регулятор оборотов электродвигателя, соединенный с мультиплексором.
| СИЛОВАЯ УСТАНОВКА ВЕРТОЛЕТА | 1994 |
|
RU2061626C1 |
| US 10836467 B2, 17.11.2020 | |||
| EP 4219320 A1, 02.08.2023 | |||
| US 20230406551 A1, 21.12.2023 | |||
| US 20230303274 A1, 28.09.2023. | |||

