[Область техники]
[0001]
Настоящее изобретение относится к способу управления парковкой и аппаратуре управления парковкой.
[Уровень техники]
[0002]
Известна технология, в которой, когда транспортное средство припарковано в месте для парковки посредством управления извне транспортного средства, транспортное средство управляется, чтобы сделать остановку, если объект обнаружен вокруг транспортного средства (патентный документ 1).
[Документ предшествующего уровня техники]
[Патентный Документ]
[0003]
[Патентный Документ 1] JP2008-074296A
[Сущность изобретения]
[Задачи, решаемые изобретением]
[0004]
В вышеупомянутом предшествующем уровне техники транспортное средство управляется так, чтобы сделать остановку, даже когда обнаруживается объект, который фактически не препятствует движению транспортного средства, и поэтому оператору приходится повторять операцию для парковки транспортного средства.
[0005]
Задача, которая должна быть решена с помощью настоящего изобретения, состоит в том, чтобы избежать во всех случаях/единообразной остановки транспортного средства при обнаружении изменения фактора окружающей среды парковки вокруг транспортного средства, такого как обнаружение объекта.
[Средства для решения задач]
[0006]
Настоящее изобретение решает вышеупомянутую задачу посредством того, что, когда есть изменение фактора окружающей среды парковки транспортного средства, обнаруженное после начала выполнения первой инструкции управления относительно фактора окружающей среды парковки транспортного средства, обнаруженного до начала выполнения первой инструкции управления, делают запрос оператору о том, необходимо или нет выполнять второе управление для удаления транспортного средства от целевого пространства парковки (чтобы транспортное средство удалялось от целевого пространства парковки).
[Эффект изобретения]
[0007]
Согласно настоящему изобретению, когда изменение фактора окружающей среды парковки, такое как обнаружение объекта, обнаружено вокруг транспортного средства, оператору делается запрос о том, необходимо или нет выполнять второе управление для удаления транспортного средства от целевого пространства парковки без во всех случаях/единообразной остановки транспортного средства и, следовательно, переход ко второму управлению может быть быстро выполнен в ответ на изменение фактора окружающей среды (окружения) парковки.
[Краткое описание чертежей]
[0008]
ФИГ. 1 - блок-схема, иллюстрирующая пример системы управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения.
ФИГ. 2А - схема для описания первой схемы обнаружения для позиции оператора.
ФИГ. 2B - схема для описания второй схемы обнаружения для позиции оператора.
ФИГ. 2C - схема для описания третьей схемы обнаружения для позиции оператора.
ФИГ. 2D схема для описания четвертой схемы обнаружения для позиции оператора.
ФИГ. 3А - схема для описания первой схемы обнаружения для объекта.
ФИГ. 3B - схема для описания второй схемы обнаружения для объекта.
ФИГ. 4 блок-схема последовательности операций, иллюстрирующая пример процедуры управления, выполняемой системой управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения.
ФИГ. 5 является блок-схемой последовательности операций, иллюстрирующей подпрограмму процесса определения, есть ли изменение фактора окружающей среды парковки.
ФИГ. 6А - схема, иллюстрирующая пример первой информации отображения на терминальном устройстве при выполнении первого управления.
ФИГ. 6B - схема, иллюстрирующая пример первой информации отображения на терминальном устройстве при выполнении второго управления.
ФИГ. 7А - схема, иллюстрирующая пример второй информации отображения на терминальном устройстве при выполнении первого управления.
ФИГ. 7B - схема, иллюстрирующая пример второй информации отображения на терминальном устройстве при выполнении второго управления.
ФИГ. 8A - схема, иллюстрирующая пример третьей информации отображения на терминальном устройстве при выполнении первого управления.
ФИГ. 8B - схема, иллюстрирующая пример третьей информации отображения на терминальном устройстве при выполнении второго управления.
ФИГ. 9A - схема, иллюстрирующая пример четвертой информации отображения на терминальном устройстве при выполнении первого управления.
ФИГ. 9B - схема, иллюстрирующая пример четвертой информации отображения на терминальном устройстве при выполнении второго управления.
ФИГ. 10A - схема, иллюстрирующая пример пятой информации отображения на терминальном устройстве при выполнении первого управления.
ФИГ. 10B - схема, иллюстрирующая пример пятой информации отображения на терминальном устройстве при выполнении второго управления.
[Режим(ы) для осуществления настоящего изобретения]
[0009]
Далее один или несколько вариантов осуществления настоящего изобретения будут описаны со ссылкой на чертежи.
В вариантах осуществления настоящее изобретение будет описано посредством примера случая, в котором аппаратура управления парковкой в соответствии с настоящим изобретением применяется к системе управления парковкой. Аппаратура управления парковкой также может быть применена к портативному операционному терминалу (оборудованию, такому как смартфон или PDA: Персональный цифровой помощник), способный обмениваться информацией с бортовой аппаратурой. Способ управления парковкой в соответствии с настоящим изобретением может использоваться в аппаратуре управления парковкой, которая будет описано ниже.
[0010]
На фиг.1 показана блок-схема системы 1000 управления парковкой, включающей в себя аппаратуру 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения. Система 1000 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя камеры 1a-1d, устройства 2 ранжирования, информационный сервер 3, операционный терминал 5, аппаратуру 100 управления парковкой, контроллер 70 транспортного средства, систему 40 привода. датчик 50 угла поворота рулевого колеса и датчик 60 скорости транспортного средства.
[0011]
Аппаратура 100 управления парковкой согласно одному или нескольким вариантам осуществления настоящего изобретения вынуждает устройство управления (ECU: Блок управления двигателем) транспортного средства выполнять первую инструкцию управления (инструкцию управления парковкой) для движения транспортного средства в качестве цели управления по первому маршруту к целевому пространству парковки (парковочному месту) на основе рабочей команды, полученной от оператора. Аппаратура 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения управляет операцией движения (парковки) транспортного средства V в качестве цели управления в целевое пространство парковки на основе рабочей команды, которая вводится с операционного терминала 5. Аппаратура 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения управляет операцией движения транспортного средства V таким образом, чтобы удалить транспортное средство V от целевого пространства парковки (так, чтобы удалить транспортное средство V от целевого пространства парковки) (так что транспортное средство V находится/становится отдаленным от целевого пространства парковки) (так, чтобы транспортное средство V покинуло целевое пространство парковки) на основе рабочей команды, которая вводится в операционный терминал 5 оператором M, расположенным вне транспортного средства. Один или несколько вариантов осуществления настоящего изобретения будут описаны со ссылкой на примерный случай, в котором оператор М находится вне транспортного средства, но оператор М может находиться внутри салона транспортного средства V1. В другом случае пассажиры, включая водителя, могут находиться внутри салона транспортного средства, в то время как оператор М (например, управляющий парковочным местом) может находиться вне транспортного средства.
[0012]
Операционный терминал 5 представляет собой портативный компьютер, который может быть выведен наружу из транспортного средства V и имеет функцию ввода и функцию связи. Операционный терминал 5 принимает ввод рабочей команды, сделанной оператором M для управления вождением (работой) транспортного средства V для парковки. Вождение включает в себя операции для парковки (операции для въезда на пространство парковки и выезда из пространства парковки). Оператор М вводит инструкции через операционный терминал 5. Инструкции включают в себя рабочую команду для выполнения парковки. Рабочая команда включает в себя информацию о выполнении/остановке управления парковкой, выборе/изменении целевого положения парковки и выборе/изменении маршрута парковки и другую информацию, необходимую для парковки. Оператор M также может заставить аппаратуру 100 управления парковкой распознавать инструкции, включающие в себя рабочую команду, без использования операционного терминала 5, например жест, сделанный оператором M (то есть оператор M может вводить такие инструкции в аппаратуру 100 управления парковкой без использования операционного терминала 5, например, жестом). Примеры команд управления, которые вводятся оператором М через операционный терминал 5, включают в себя не только рабочую команду для выполнения парковки, но также команду эвакуации для удаления транспортного средства от целевого пространства парковки.
[0013]
Операционный терминал 5 включает в себя устройство связи и способен обмениваться информацией с устройством 100 управления парковкой и информационным сервером 3. Операционный терминал 5 передает рабочую команду, которая вводится вне транспортного средства, в аппаратуру 100 управления парковкой через сеть связи и вводит рабочую команду в аппаратуру 100 управления парковкой. Операционный терминал 5 связывается с устройством 100 управления парковкой, используя сигналы, включающие в себя уникальный идентификационный код. Операционный терминал 5 включает в себя дисплей 53. Дисплей 53 представляет интерфейс ввода и различные информационные элементы. Когда дисплей 53 является дисплеем типа панели касания, он имеет функцию приема рабочей команды. Операционный терминал 5 может быть портативным оборудованием, таким как смартфон или PDA: Персональным цифровым помощником, в котором установлены приложения для приема ввода рабочей команды, используемой в способе управления парковкой, в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, и передачи рабочей команды на аппаратуру 100 управления парковкой.
[0014]
Информационный сервер 3 является устройством предоставления информации, обеспеченным в сети, допускающей связь. Информационный сервер включает в себя устройство 31 связи и запоминающее устройство 32. Запоминающее устройство 32 включает в себя считываемую информацию 33 карты, информацию 34 парковочного места и информацию 35 объекта. Аппаратура 100 управления парковкой и операционный терминал 5 могут осуществлять доступ к запоминающему устройству 32 информационного сервера 3, чтобы получать каждый информационный элемент.
[0015]
Аппаратура 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя устройство 10 управления, устройство 20 ввода и устройство 30 вывода. Эти компоненты аппаратуры 100 управления парковкой соединены друг с другом через локальную сеть контроллера (CAN) или другую бортовую локальную сеть LAN для взаимного обмена информацией. Устройство 20 ввода включает в себя устройство 21 связи. Устройство 21 связи принимает рабочую команду, переданную от внешнего операционного терминала 5, и вводит рабочую команду в устройство 20 ввода. Субъектом, который вводит рабочую команду на внешний операционный терминал, может быть человек (пользователь, пассажир, водитель или работник парковочного объекта). Устройство 20 ввода передает принятую рабочую команду на устройство 10 управления. Устройство 30 вывода включает в себя дисплей 31. Устройство 30 вывода уведомляет водителя об информации управления парковкой. Дисплей 31 в соответствии с одним или несколькими вариантами осуществления настоящего изобретения представляет собой дисплей типа панели касания, имеющий функцию ввода и функцию вывода. Когда дисплей 31 имеет функцию ввода, он служит в качестве устройства 20 ввода. Даже когда транспортное средство V управляется на основе рабочей команды, которая вводится с операционного терминала 5, пассажир (водитель или пассажир) может вводить рабочую команду, такую как команда для аварийного останова, через устройство 20 ввода.
[0016]
Устройство 10 управления аппаратуры 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения представляет собой компьютер для управления парковкой, включающий в себя ROM 12, в котором хранится программа управления парковкой, CPU 11 в качестве операционной схемы, которая исполняет сохраненную в ROM 12 программу для того, чтобы служить в качестве аппаратуры 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения, и RAM 13, которое служит в качестве доступного запоминающего устройства.
[0017]
Программа управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя инструкции по выполнению для побуждения устройства 10 управления выполнять некоторые процессы на основе рабочей команды, полученной от оператора. Этот процесс включает в себя процесс, вынуждающий контроллер 70 транспортного средства выполнять первую инструкцию управления для движения транспортного средства по первому маршруту в целевое пространство парковки; процесс определения изменения фактора среды (окружения) парковки (процесс оценки величины изменения фактора среды парковки); и когда есть изменение фактора среды парковки, делают запрос оператору о том, необходимо ли выполнять второе управление, чтобы транспортное средство удалялось от целевого пространства парковки.
Программа управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения может включать в себя инструкции выполнения для приостановки или отмены выполнения первой инструкции управления, когда команда выполнения для второго управления вводится оператором; вычисление второго маршрута, чтобы транспортное средство удалялось от целевого пространства парковки; генерирование или получение второй инструкции управления для движения транспортного средства по второму маршруту; и вынуждение устройства управления выполнять вторую инструкцию управления.
[0018]
Аппаратура 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения является аппаратурой типа дистанционного управления, которая принимает рабочую команду от операционного терминала 5 и управляет движением транспортного средства V для парковки транспортного средства V в заданное пространство парковки. Пассажир, который управляет операционным терминалом 5, может быть расположен снаружи салона транспортного средства или также может быть расположен внутри салона транспортного средства.
[0019]
Аппаратура 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения может быть автономного (автоматического) типа управления, в которой операция руления и операция ускорения/торможения выполняются автономным (автоматическим) образом. Аппаратура 100 управления парковкой также может быть полуавтономного (полуавтоматического) типа, в котором операция руления выполняется автономно, в то время как водитель выполняет операцию ускорения/торможения.
В программе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения пользователь может произвольно выбирать целевое положение парковки, или аппаратура 100 управления парковкой или сторона парковочного объекта могут автоматически устанавливать целевое положение парковки.
[0020]
Устройство 10 управления аппаратуры 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения имеет функции выполнения первого процесса управления движением транспортного средства по первому маршруту к целевому пространству парковки; процесс обнаружения изменения фактора среды парковки транспортного средства; процесс определения изменения фактора среды парковки (процесс оценки величины изменения фактора среды парковки); и когда есть изменение фактора среды парковки, запроса оператору, необходимо или нет выполнять второе управление для удаления транспортного средства от целевого пространства парковки.
[0021]
Устройство 10 управления имеет функции выполнения процесса приостановки или отмены выполнения первой инструкции управления, когда команда выполнения для второго управления вводится оператором; процесса вычисления второго маршрута для удаления транспортного средства от целевого пространства парковки; процесса генерирования или получения второй инструкции управления для движения транспортного средства по второму маршруту; и процесса, заставляющего устройство управления выполнять вторую инструкцию управления. Каждый из вышеупомянутых процессов выполняется посредством взаимодействия программного обеспечения для реализации процесса и вышеописанного аппаратного обеспечения.
[0022]
Некоторые процессы обнаружения положения оператора М будут описаны со ссылкой на фиг. 2А - 2D. Устройство 10 управления получает положение оператора М. Положение оператора М используется для вычисления пространства для эвакуации. Положение оператора M включает в себя информацию о положении на плоскости движения транспортного средства V. Положение оператора M включает в себя информацию о положении по высоте. Положение оператора M может быть обнаружено на основе сигналов датчиков от датчиков, предусмотренных в транспортном средстве V, или также может быть получено путем обнаружения положения операционного терминала 5, переносимого оператором M, и вычисления положения оператора M на основе положения операционного терминала 5. Операционный терминал 5 может быть предусмотрен в предопределенном положении или может также переноситься оператором М. Когда операционный терминал 5 предусмотрен в предопределенном положении, оператор М движется в положение, в котором предусмотрен операционный терминал 5, и использует операционный терминал 5 в этом положении. В этих случаях положение операционного терминала 5 может использоваться как положение оператора М.
[0023]
Как показано на фиг. 2А, положение оператора М обнаруживается на основе результатов обнаружения от множественных устройств 2 ранжирования, предусмотренных в транспортном средстве, и/или изображений, захваченных камерами 1. Положение оператора М может быть обнаружено на основе изображений, захваченных камерами 1a-1d. Каждое устройство 2 ранжирования для использования может представлять собой радиолокационное устройство, такое как радиолокационное устройство миллиметрового диапазона, лазерное радиолокационное устройство или ультразвуковое радиолокационное устройство или сонарное устройство. Множественные устройства 2 ранжирования и их результаты обнаружения могут быть идентифицированы, и поэтому двумерное положение и/или трехмерное положение оператора M могут быть обнаружены на основе результатов обнаружения. Устройства 2 ранжирования могут быть обеспечены в тех же положениях, что и камеры 1a-1d, или могут также быть обеспечены в разных положениях. Устройство 10 управления также может обнаруживать жест оператора M на основе изображений, захваченных камерами 1a-1d, и идентифицировать рабочую команду, связанную с признаками изображения упомянутого жеста.
[0024]
Как показано на фиг. 2B, положение операционного терминала 5 или оператора M, несущего операционный терминал 5, также может быть обнаружено на основе радиоволн связи между множественными антеннами 211, предоставленными в разных положениях транспортного средства V и операционного терминала 5. Когда множественные антенны 211 обмениваются данными с одним операционным терминалом 5, интенсивность принимаемой радиоволны каждой антенны 211 отличается. Положение операционного терминала 5 может быть вычислено на основе разности интенсивности между принятыми радиоволнами антенн 211. Двумерное положение и/или трехмерное положение операционного терминала 5 или оператора М может быть вычислена из разности интенсивности между принятыми радиоволнами антенн 211.
[0025]
Как показано на фиг. 2C, преопределенное положение (направление/расстояние: D1, D2) относительно сиденья водителя DS транспортного средства V могут быть предварительно обозначено как рабочее положение оператора M или как положение, в котором расположен операционный терминал 5. Например, когда оператор М временно останавливает транспортное средство V в назначенном положении и выходит из транспортного средства V, чтобы оперировать операционным терминалом 5, предусмотренным в предопределенном положении, можно вычислить начальное положение оператора М относительно транспортного средства V или начальное положение терминала 5, который переносится оператором М, относительно транспортного средства V.
[0026]
Как показано на фиг. 2D аналогичным образом, информация изображении, представляющая рабочее положение (положение, в котором оператор M стоит: рабочее положение) относительно транспортного средства V, отображается на дисплее 53 операционного терминала 5. Это управление дисплеем может выполняться приложением, установленным на стороне операционного терминала 5, или также может выполняться на основе команды от устройства 10 управления.
[0027]
Процесс обнаружения объекта будет описан со ссылкой на фиг. 3А и 3В. В одном или нескольких вариантах осуществления настоящего изобретения «объекты» включают в себя конструкции, такие как стены и столбы парковки, установки вокруг транспортного средства, пешеходов, другие транспортные средства, припаркованные транспортные средства и т.д.
Как показано на фиг. 3А, объект обнаруживается на основе результатов обнаружения от множественных устройств 2 ранжирования, предусмотренных в транспортном средстве V, и/или изображений, захваченных камерами 1. Устройства 2 ранжирования обнаруживают наличие или отсутствие объекта, положение объекта, размер объекта и расстояние до объекта на основе принятых сигналов от радарных устройств. Дополнительно или альтернативно, наличие или отсутствие объекта, положение объекта, размер объекта и расстояние до объекта могут быть обнаружены на основе изображений, захваченных камерами 1a-1d. Обнаружение объекта может быть выполнено с использованием технологии стерео движения камерами 1a-1d. Результаты обнаружения используются для определения того, является ли пространство парковки пустым (независимо от того, припарковано или нет транспортное средство в пространстве парковки).
[0028]
Как показано на фиг. 3B, объекты, включающие в себя конструкции, такие как стены и столбы парковки, могут быть обнаружены на основе информации 34 парковки, полученной из запоминающего устройства 32 информационного сервера 3. Информация о парковке включает в себя местоположение и идентификационный номер каждой парковки, а также позиционную информацию проходов, столбов, стен, мест для хранения и т. д. в парковочном объекте. Информационный сервер 3 может управляться персоналом парковки.
[0029]
Процедура управления для управления парковкой будет описана ниже со ссылкой на блок-схему, показанную на фиг. 4.
На фиг.4 показана блок-схема последовательности операций, иллюстрирующая процедуру управления процессом управления парковкой, выполняемым системой 1000 управления парковкой, в соответствии с одним или несколькими вариантами осуществления настоящего изобретения. Средство инициирования запуска процесса управления парковкой конкретно не ограничен, и процесс управления парковкой может быть инициирован с помощью переключателя запуска устройства 100 управления парковкой.
[0030]
Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения имеет функцию движения транспортного средства V автономным способом в пространство парковки на основе рабочей команды, полученной извне транспортного средства.
[0031]
На этапе 101 устройство 10 управления аппаратуры 100 управления парковкой получает информацию вокруг транспортного средства в преопределенном цикле. Информация вокруг транспортного средства является информацией о факторе среды парковки транспортного средства V, который будет описан позже. Процесс получения сигналов ранжирования и процесс получения захваченных изображений могут выполняться выборочно. Устройство 10 управления получает, при необходимости, сигналы ранжирования от устройств 2 ранжирования, которые прикреплены к множественным местам транспортного средства V. Устройство 10 управления получает при необходимости изображения, которые захватываются камерами 1a-1d, прикрепленными к множественным местам транспортного средства V. Хотя это и не ограничено конкретно, камера 1a расположена на передней решетке транспортного средства V, камера 1d расположена вблизи заднего бампера, а камеры 1b и 1c расположены на нижних частях правого и левого зеркал дверей. Камера, имеющая широкоугольный объектив с широким углом обзора, может использоваться в качестве каждой из камер 1a-1d. обзора. Камеры 1a-1d захватывают изображения пограничных линий пространств парковки вокруг транспортного средства V и объектов, существующих вокруг пространств парковки. Камеры 1a - 1d могут быть камерами CCD, инфракрасными камерами или другими соответствующими устройствами формирования изображения.
[0032]
На этапе 102 устройство 10 управления обнаруживает пространства парковки, в которых парковка возможна. Данные о положении, размере и т.п. пространства парковки являются информацией фактора среды парковки транспортного средства V, который будет описан позже. Устройство 10 управления обнаруживает кадры (области) пространств парковки на основе изображений, захваченных камерами 1a-1d. Устройство 10 управления обнаруживает пустые пространства парковки, используя данные обнаружения от устройств ранжирования и данные обнаружения, извлеченные из захваченных изображений. Устройство 10 управления обнаруживает доступные пространства парковки среди пространств парковки. Доступные пространства парковки - это пространства парковки, которые пусты (т. е. другие транспортные средства не припаркованы) и для которых можно рассчитать маршруты для завершения парковки. Целевое пространство парковки для парковки транспортного средства указывается из числа доступных пространств парковки. В одном или нескольких вариантах осуществления настоящего изобретения условие, что маршрут парковки может быть вычислен, означает, что траектория маршрута от текущего положения до целевого положения парковки может быть воспроизведена по координатам дорожного покрытия, не мешая объектам (включая припаркованные транспортные средства).
[0033]
На этапе 103 устройство 10 управления передает доступные пространства парковки на операционный терминал 5, управляет дисплеем 53 для отображения доступных пространств парковки и просит оператора M ввести информацию о выборе целевого положения парковки для парковки транспортного средства V. Целевое положение парковки может быть автоматически выбрано устройством 10 управления или стороной парковочного объекта. Когда рабочая команда указания пространства парковки вводится в операционный терминал 5, пространство парковки устанавливается в качестве целевого положения парковки.
[0034]
На этапе 104 устройство 10 управления обнаруживает объект с использованием ранее описанной схемы. Объекты включают пешеходов, дорожные знаки, дорожные конструкции, грузы, подвижные объекты, конструкции, которые образуют пространства парковки, бордюрные камни, которые разделяют пространства парковки и т. д. Структуры, которые образуют пространства парковки, представляют собой здания, которые представляют собой гаражи, навесы для автомобилей и тому подобное. Обнаружение объектов включает в себя обнаружение препятствий, которые препятствуют выполнению управления парковкой. Каждый из них является фактором среды парковки транспортного средства V, который будет описан позже.
[0035]
На этапе 105 устройство 10 управления вычисляет первый маршрут к целевому пространству парковки на основе фактора среды парковки транспортного средства V. Любая схема, известная на момент подачи настоящей заявки, может использоваться для процесса вычисления первого маршрута к целевому пространству парковки.
[0036]
На этапе 106 устройство 10 управления генерирует первую инструкцию управления для движения транспортного средства V по вычисленному первому маршруту. Устройство 10 управления предварительно сохраняет информацию о спецификации транспортного средства V, необходимую для инструкции управления. Примеры первой инструкции управления включают в себя рабочие инструкции для величины рулевого управления, скорости рулевого управления, ускорения рулевого управления, положения переключения, скорости (включая ноль), ускорения и замедления транспортного средства V, которые связаны с моментом или положением, когда транспортное средство V перемещается по маршруту парковки, и другие рабочие инструкции. Первая инструкция управления включает в себя время выполнения или положение выполнения вышеупомянутой рабочей инструкции для транспортного средства V. Инструкция, касающаяся маршрута парковки, и рабочая инструкция, связанная с маршрутом парковки, выполняются транспортным средством V, и, таким образом, транспортное средство V может быть двигаться (парковаться) в целевое положение парковки.
[0037]
На этапе 107 устройство 10 управления принимает ввод инструкции выполнения первой инструкции управления от оператора М. Когда инструкция выполнения вводится, процесс переходит к этапу 108, на котором начинается выполнение первой инструкции управления. Инструкция выполнения может быть вводом в переключатель автоблокировки операционного терминала 5. Переключатель автоблокировки представляет собой переключатель, имеющий функцию продолжения выполнения процесса управления парковкой, только когда оператор прикладывает усилие к переключателю, и функцию приостановки или отмены выполнения процесса управления парковкой, когда сила, приложенная к переключателю, снимается. Пока нажат переключатель автоблокировки операционного терминала 5, процесс управления парковкой выполняется непрерывно.
[0038]
На этапе 109 устройство 10 управления обнаруживает изменение фактора среды парковки транспортного средства V1, обнаруженного после начала выполнения первой инструкции управления, относительно фактора среды парковки транспортного средства V1, обнаруженного до начала выполнения первой инструкции управления. Даже после того, как начато управление парковкой (первое управление) транспортного средства V1, результат обнаружения объекта и результат обнаружения пространства парковки изменяются каждый момент. Пешеход (объект) может вновь появиться с течением времени, объект, который не был обнаружен, может быть обнаружен из-за изменения положения транспортного средства V1, или положение и/или размер пространства парковки могут измениться.
[0039]
Например, бампер или тому подобное другого припаркованного транспортного средства образован с изогнутой поверхностью; следовательно, отраженные волны от упомянутого другого транспортного средства, облученные радаром, не могут быть обнаружены во время приближения к другому транспортному средству, и присутствие другого транспортного средства может не обнаруживаться. Однако после поворота для парковки отношение положения между другим транспортным средством и рассматриваемым транспортным средством изменяется, поэтому может быть возможным принимать отраженные волны от другого транспортного средства, облученного радаром, и обнаруживать присутствие другого транспортного средства. То есть, когда транспортное средство V1 управляется так, чтобы двигаться прямо по маршруту парковки для парковки под прямым углом, а затем поворачивать для парковки и перемещаться по маршруту парковки (первому маршруту) для въезда на пространство парковки при движении назад, определение будет таким, что «присутствует другое транспортное средство» в положении поворота для парковки или во время движения назад, даже если было сделано определение, что «другого транспортного средства нет» во время запуска управления парковкой или движения прямо вперед. В таком случае делается определение, что фактор среды парковки изменился.
[0040]
Фактор среды парковки относится к фактору среды (окружения) вокруг транспортного средства, подлежащего парковке (управляемому транспортному средству), который влияет на возможность выполнения управления парковкой. Факторы среды, которые влияют на управление парковкой, включают в себя наличие/отсутствие/положение другого транспортного средства вокруг транспортного средства, подлежащего парковке, положение/размер пространства парковки и другие подобные факторы. Примеры изменения фактора среды парковки включают в себя ситуацию, в которой объект был вновь обнаружен, изменение положения, формы, размера или атрибута объекта, который был обнаружен, и изменение положения, формы, размера, высоты или атрибута пространства парковки, которое было обнаружено. Атрибуты пространства парковки включают в себя формы/типы парковки, такие как параллельная парковка, парковка под прямым углом и парковка под углом. Атрибуты объекта включают в себя определение того, является ли объект стационарным объектом, является ли объект движущимся объектом, объект является пешеходом, является ли объект взрослым, является ли объект ребенком, является ли объект мусором, является ли объект дорожной структурой, или объект является природным объектом. Дорожные структуры включают в себя дорожные знаки.
[0041]
Хотя это и не ограничивается конкретно, изменение фактора среды парковки является результатом сравнения между первым фактором среды парковки в первый момент времени в качестве эталона и вторым фактором среды парковки во второй момент времени после первого момента времени. Первый момент времени может быть моментом времени, когда начинается выполнение первой инструкции управления (включая момент времени непосредственно перед или после начала). В качестве альтернативы, первый момент времени может быть моментом времени, когда получен фактор среды парковки, используемый для вычисления первого маршрута. В частности, при сравнении между первым фактором среды парковки транспортного средства, обнаруженным до начала выполнения первой инструкции управления, и вторым фактором среды парковки транспортного средства, обнаруженным после начала выполнения первой инструкции управления, когда величина изменения между первым значением оценки первого фактора среды парковки и вторым значением оценки второго фактора среды парковки не меньше, чем предопределенное значение, устройство 10 управления определяет, что есть изменение фактора среды парковки.
[0042]
Посредством количественного определения того, есть ли изменение фактора среды парковки, на основе величины изменения между первым значением оценки первого фактора среды парковки и вторым значением оценки второго фактора среды парковки, момент времени запроса о выполнении второго управления может быть определен точно и надлежащим образом.
[0043]
Оценка того, что объект был вновь обнаружен, выполняется следующим образом. Устройство 10 управления может определять, есть ли изменение фактора среды парковки, на основе того, удовлетворяется или нет предопределенное некоторое условие. Первое значение оценки того, что объект не обнаружен в первый момент времени, определено как «ноль», тогда как второе значение оценки того, что объект обнаружен во второй момент времени, определено как «1», и значение разности между значениями оценки используется как сумма изменения значения оценки. Устройство 10 управления определяет предопределенное условие как величину изменения, равную или превышающую предопределенное значение «1», и определяет, что фактор среды парковки удовлетворяет предопределенному условию, на основе значения разности между значениями оценки, равными «1».
[0044]
Оценка изменения результата обнаружения, представленного физической величиной, такой как координата или длина, выполняется следующим образом. Для изменения положения, формы или размера объекта, который был обнаружен, устройство 10 управления вычисляет величину изменения значения оценки на основе обнаруженной физической величины. То же самое относится к изменению положения, формы или размера пространства парковки.
[0045]
Оценка определения атрибута на основе результата обнаружения выполняется следующим образом. Атрибут определяется на основе изображений, захваченных камерами 1a-1d. На основе величины временного изменения в захваченных изображениях определяется, является ли объект стационарным объектом или движущимся объектом. Сопоставление образов объекта, извлеченного из захваченных изображений, может быть проведено, чтобы определить, является ли объект пешеходом, объект является мусором или объект является дорожной структурой. Является ли объект взрослым пешеходом или является ли он пешеходом-ребенком, можно определить на основе сопоставления образов и размера объекта, извлеченного из захваченных изображений.
[0046]
«Атрибуты» объекта OB включают в себя «препятствие», которое препятствует движению транспортного средства, и «не препятствие», которое не препятствует движению транспортного средства. «Не препятствие» - это объект, который не препятствует движению транспортного средства V, например, движущийся объект, объект, имеющий высоту 20 см или менее, объект, имеющий высоту 10 см или менее, мусор, ступень с перепадом уровней 20 см или менее, ступень с перепадом уровней 10 см или менее, упавший лист или трава.
[0047]
Движущийся объект становится отсутствующим на первом маршруте с течением времени и, таким образом, не препятствует движению транспортного средства V1. Объект, имеющий высоту 20 см или менее, объект, имеющий высоту 10 см или менее, ступень с перепадом уровней 20 см или менее, ступень с перепадом уровней 10 см или менее, мусор, опавшие листья, трава и тому подобное также не препятствуют движению транспортного средства V1. Высота и размер объекта могут быть определены на основе захваченных изображений и результатов измерений с помощью устройств 2 ранжирования. Сумка для покупок из полиэтилена или тому подобного, имеющаяся в супермаркете или тому подобном, имеет верхний предел (например, около 40 см × 40 см) в размере и может перемещаться в различных направлениях из-за ветра или тому подобного. Хотя опавшие листья, трава и тому подобное являются природными объектами, их присутствие можно определить на основе признаков на изображении или изменений во времени таких признаков, как цвет, форма сбора и движение в разных направлениях из-за ветра или тому подобного.
[0048]
Оценка изменений атрибутов на основе результатов обнаружения выполняется следующим образом. Устройство 10 управления выдает значение оценки, связанное с атрибутом. Атрибут определяется на основе разницы между числовыми значениями, определенными для каждого атрибута, или разницы между абсолютными значениями.
[0049]
ФИГ. 5 иллюстрирует подпрограмму этапа 109 на фиг. 4. Процесс, показанный на фиг. 5 позволяет устройству 10 управления выполнять процесс определения того, есть ли изменение фактора среды парковки. Есть ли изменение фактора среды парковки, может быть определено на основе того, удовлетворяется или нет предопределенное условие. Предопределенное условие определяется с точки зрения определения того, что состояние, в котором может быть продолжено управление парковкой (первое управление), поддерживается или состояние, в котором продолжение должно рассматриваться. Когда предопределенное условие удовлетворяется, рассматривается продолжение управления парковкой (первое управление) и учитывается активация режима спасения (второе управление). С другой стороны, когда преопределенное условие не удовлетворяется, не происходит изменения фактора среды парковки, и выполнение управления парковкой (первое управление) продолжается.
[0050]
На этапе 201 устройство 10 управления считывает первое значение оценки первого фактора среды парковки в первый момент времени после начала выполнения первой инструкции управления. Прошлые результаты обнаружения сохраняются в запоминающем устройстве 132 в качестве информации 135 объекта.
[0051]
На этапе 202 устройство 10 управления вычисляет второе значение оценки второго фактора среды парковки во второй момент времени после первого момента времени на основе изображений, захваченных камерами 1, и значений измерения от устройств 2 ранжирования.
[0052]
На этапе 203 устройство 10 управления вычисляет разницу между первым значением оценки и вторым значением оценки как величину изменения.
[0053]
На этапе 204 устройство 10 управления определяет, равна или нет величина изменения, вычисленная на этапе 203, или больше, чем предопределенное значение.
[0054]
Когда на этапе 204 величина изменения равна или превышает предопределенное значение, устройство 10 управления определяет на этапе S205, что имеется изменение фактора среды парковки, и процесс переходит к этапу 110 по фиг. 4. Когда величина изменения равна или превышает предопределенное значение, может быть сделано определение, что предопределенное некоторое условие удовлетворено. Это состояние, в котором изменение фактора среды парковки является большим, и следует учитывать продолжение управления парковкой. Когда на этапе S204 величина изменения меньше, чем предопределенное значение, устройство 10 управления определяет, что нет изменения фактора среды парковки, и процесс переходит к этапу 206, на котором продолжается первое управление (управление парковкой).
[0055]
На этапе 110 по фиг. 4, устройство 10 управления делает запрос оператору M относительно того, необходимо или нет выполнять вторую инструкцию управления, чтобы транспортное средство V1 удалялось от целевого пространства парковки PL. Когда есть изменение фактора среды парковки, устройство 10 управления управляет операционным терминалом 5, чтобы представить дисплей для запроса ввода команды выполнения для второй инструкции управления.
[0056]
Фиг. 6A и 6B - примеры отображения на дисплее 53 операционного терминала 5. Как показано на. 6A и 6B, внешний вид транспортного средства V1 перед парковкой, другие транспортные средства V2, припаркованные вокруг транспортного средства V1, целевое пространство парковки для транспортного средства V1 и объект OB, который присутствует на маршруте к целевому пространству парковки (то есть объекту OB, на который следует обратить внимание), представлены после преобразования координат, если смотреть сверху. Эта форма отображения также относится к фиг. 7А и 7В на фиг. 10А и 10В, которые будут описаны позже.
[0057]
ФИГ. 6А иллюстрирует пример информации представления для ввода команды выполнения для первого управления (управление парковкой). ФИГ. 6B иллюстрирует пример информации представления для ввода инструкции выполнения для второго управления (управления режимом спасения). Оператор М управляет представлением изображения в качестве интерфейса для ввода в исполнение первого управления. Когда выполняется первое управление (управление парковкой), оператор M нажимает или касается кнопки «GO» (Начать). Кнопка «GO» - это кнопка ввода ранее описанного переключателя автоблокировки, и выполнение первого управления продолжается, пока кнопка нажата.
[0058]
ФИГ. 6B является примером информации представления для выполнения запроса к оператору M относительно того, необходимо ли выполнять второе управление, которое должно удалить транспортное средство V1 от целевого пространства парковки, и для приема ввода выполнения инструкция от оператора. Когда первое управление выполняется для транспортного средства V1, объект OB находится вблизи точки поворота для парковки, поэтому первое управление приостанавливается. В этом случае устройство 10 управления 10 отображает кнопку «Rescue» (Спасение), чтобы сделать запрос оператору М о выполнении второго управления. Когда принятие ввода осуществляется через кнопку «Rescue», устройство 10 управления выполняет вторую инструкцию управления. В этом примере название второго управления для удаления транспортного средства V1 от целевого пространства парковки называется режимом «спасения» (Rescue), но это название конкретно не ограничено.
[0059]
Когда определено, что есть изменение фактора среды парковки, дисплей, запрашивающий о вводе команды выполнения для второй инструкции управления, представлен на операционном терминале 5, способном к связи, и, следовательно, можно быстро подтвердить намерение оператора М относительно переключения на второе управление для удаления от целевого пространства парковки, а также для быстрого выполнения второго управления.
[0060]
Ниже будут описаны четыре примера конкретных схем для определения, имеется ли изменение фактора среды парковки транспортного средства, и информация представления для запроса о том, необходимо или нет выполнять вторую инструкцию управления.
[0061]
(1) Во-первых, критерий для устройства 10 управления, чтобы определить, что есть изменение фактора среды парковки, может быть определен ситуацией, в которой «объект обнаружен на первом маршруте после начала выполнения первой инструкции управления».
ФИГ. 7А иллюстрирует пример представления информации на основе результата обнаружения в первый момент времени, когда начинается первое управление. Для наглядности предполагается, что объект OB, обозначенный пунктирной линией на фиг. 7А не был обнаружено в первый момент времени. Устройство 10 управления обнаруживает объект OB как новый объект во второй момент времени после первого момента времени. Устройство 10 управления определяет, что объект OB находится на первом маршруте в первой инструкции управления, а также определяет, что есть изменение фактора среды парковки. Устройство 10 управления управляет дисплеем 53 операционного терминала 5 для представления информации представления по фиг. 7В. Информация представления, показанная на фиг. 7B включает в себя объект OB, обнаруженный во второй момент времени, а также включает в себя кнопку «Rescue» для выполнения запроса оператору M относительно того, необходимо или нет выполнять второе управление. Примеры «нового объекта» включают в себя движущийся объект. С точки зрения устранения ситуации, в которой делается определение, что «имеет место изменение фактора среды парковки» на основе обнаружения движущегося объекта, который проходит за короткое время, движущийся объект, обнаруженный при скорости ( величине изменения в положении) движущегося объекта не более предопределенной величины, может быть определен как «новый объект», который препятствует выполнению управления парковкой. С аналогичной точки зрения, движущийся объект, который движется (движется назад и вперед) по множеству направлений движения, может быть определен как «новый объект», который препятствует выполнению управления парковкой.
[0062]
Фактор среды парковки, который может быть обнаружен устройством 10 управления, изменяется каждый момент, когда транспортное средство V1 движется, и, следовательно, новый объект может быть обнаружен на первом маршруте после начала выполнения первой инструкции управления. В таком случае может быть трудно двигать транспортное средство V1 по первому маршруту, который был предварительно установлен. Когда новый объект обнаружен на первом маршруте после начала выполнения первой инструкции управления, посредством запроса оператору М относительно того, необходимо ли выполнять второе управление, переключение на второе управление для удаления от целевого пространства парковки может быть выполнено быстро.
[0063]
(2) Во-вторых, критерий для устройства 10 управления, чтобы определить, что есть изменение фактора среды парковки, может быть определен ситуацией, в которой «положение или размер целевого пространства парковки, обнаруженный после начала выполнения первой инструкции управления изменяется на преопределенное значение или более от положения или размера целевого пространства парковки, обнаруженного ранее».
ФИГ. 8А иллюстрирует пример информации представления, основанной на результате обнаружения в первый момент времени около начала первого управления. Область SH тени, показанная на фиг. 8A не обнаруживается в первый момент времени, и размер целевого пространства парковки, обозначенного символом P, обнаруживается как широкий (большой). Во второй момент времени после первого момента времени устройство 10 управления обнаруживает все другие транспортные средства, как показано на фиг. 8B, и распознает, что размер целевого пространства парковки уже, чем предыдущий результат обнаружения. Устройство 10 управления определяет, что положение или размер целевого пространства парковки, обнаруженного после начала выполнения первой инструкции управления, изменились на преопределенное значение или более относительно положения или размера целевого пространства парковки, обнаруженного ранее, а также определяет, что есть изменение фактора среды парковки. Устройство 10 управления управляет дисплеем 53 операционного терминала 5 для представления информации представления по фиг. 8В. Информация представления, показанная на фиг. 8B включает в себя пространство парковки и другие транспортные средства, обнаруженные во второй момент времени, а также включает в себя кнопку «Rescue» для выполнения запроса оператору M о том, необходимо или нет выполнять второе управление.
[0064]
Среда обнаружения изменяется по мере движения транспортного средства V1; следовательно, контур другого припаркованного транспортного средства может быть точно не обнаружен, и/или остановка пространства парковки может быть не точно обнаружена. После начала выполнения первой инструкции управления положение или размер целевого пространства парковки, обнаруженные ранее, могут измениться. В таком случае может быть затруднительно передвигать транспортное средство V1 по первому маршруту в целевое пространство парковки, которое было предварительно установлено. Когда изменение в положении или размере целевого пространства парковки на преопределенную величину или более обнаружено после начала выполнения первой инструкции управления, посредством запроса оператору М относительно того, необходимо ли выполнять второе управление, переключение на второе управление для удаления от целевого пространства парковки может быть выполнено быстро.
[0065]
Дополнительно или альтернативно, критерий для устройства 10 управления, чтобы определять, что есть изменение фактора среды парковки, может быть определен ситуацией, в которой «положение или размер объекта, обнаруженного после начала выполнения первой инструкции управления» изменяется на преопределенное значение или более от положения или размера ранее обнаруженного объекта». В этом случае устройство 10 управления может сделать запрос оператору М относительно того, необходимо ли выполнять второе управление для удаления транспортного средства от целевого пространства парковки. Среда обнаружения изменяется по мере движения транспортного средства V1; следовательно, положение или размер объекта могут быть точно не определены. После начала выполнения первой инструкции управления положение или размер обнаруженного ранее объекта могут измениться. В таком случае может быть трудно передвигать транспортное средство V1 по первому маршруту, который был предварительно установлен. Когда изменение в положении или размере объекта на преопределенную величину или более обнаружено после начала выполнения первой инструкции управления, путем запроса оператора M относительно того, необходимо ли выполнять второе управление, переключение на второе управление для удаления от целевого пространства парковки может быть выполнено быстро.
[0066]
(3) В-третьих, критерий для устройства 10 управления, чтобы определять, что есть изменение фактора среды парковки, может быть определен ситуацией, в которой «положение M2 оператора M, обнаруженное после начала выполнения первой инструкции управления изменяется на преопределенное значение или более от положения M1 оператора M, обнаруженного ранее».
ФИГ. 9A иллюстрирует пример информации представления на основе результата обнаружения в первый момент времени около начала первого управления. Изменение между положением M1 оператора M, показанного на фиг. 9A, и положением M2 оператора M, показанного на фиг. 9B - это преопределенное значение или более. Изменение положения может быть изменением положения в преопределенном направлении (направлении оси X или направлении оси Y) или также может быть изменением расстояния в координатах XY. Устройство 10 управления определяет, что положение M2 оператора M, обнаруженное после начала выполнения первой инструкции управления, изменилось на преопределенное значение или более относительно положения M1 оператора M, обнаруженного ранее, и также определяет, что существует изменение фактора среды парковки. Дополнительно или в качестве альтернативы, критерий для устройства 10 управления, чтобы определять, что есть изменение фактора среды парковки, может быть определен ситуацией, в которой «положение оператора M удалено от транспортного средства на предопределенное расстояние (например, 6 м).» Это связано с тем, что оператор М, который выполняет дистанционное управление, должен находиться рядом с транспортным средством в качестве цели управления (в пределах предопределенного расстояния).
Как показано на фиг. 9B, устройство 10 управления управляет дисплеем 53 операционного терминала 5 для представления информации представления. Информация представления, показанная на фиг. 9B включает в себя положение оператора M, обнаруженного во второй момент времени, а также включает в себя кнопку «Rescue» для выполнения запроса оператору M о том, необходимо или нет выполнять второе управление.
[0067]
Оператор М может двигаться, когда транспортное средство V1 движется. Положение оператора М, обнаруженное после начала выполнения первой инструкции управления, может измениться с положения оператора М, обнаруженного ранее. В таком случае может быть трудно двигать транспортное средство V1 по первому маршруту, который был предварительно установлен. Когда после начала выполнения первой инструкции управления обнаруживается изменение положения оператора M на преопределенную величину или более, путем запроса оператора M относительно того, необходимо или нет выполнять второе управление, переключение на второе управление для удаления от целевого пространства парковки и движение в пространство для эвакуации может быть быстро выполнено. Таким образом, когда обнаруживается движение оператора M на преопределенное расстояние или более, может быть сделано определение, что весьма вероятно, что оператор M замечает что-то и пытается подтвердить это. В таком случае можно быстро подтвердить, может ли быть выполнено второе управление, и, следовательно, может быть улучшена возможность использования системы управления парковкой посредством дистанционного управления.
[0068]
(4) В-четвертых, критерий для устройства 10 управления, чтобы определять, что есть изменение фактора среды парковки, может быть определен ситуацией, в которой «объект, обнаруженный после начала выполнения первой инструкции управления, не является движущимся объектом». Это основано на идее, что движущийся объект, такой как пешеход, не препятствует выполнению управления парковкой после его прохождения, и поэтому фактор среды парковки может рассматриваться как неизменный.
ФИГ. 10A иллюстрирует пример информации представления на основе результата обнаружения в первый момент времени около начала первого управления. Как показано на фиг. 10A, объект OB присутствует перед транспортным средством V1. На основе изменения во времени изображений, захваченных камерами 1, выполняется определение того, является ли объект OB движущимся объектом (является ли объект OB стационарным объектом или нет). Когда объект OB является движущимся объектом, объект OB является пешеходом или тому подобным, который просто проходит, и весьма вероятно, что объект OB движется прочь от первого маршрута (маршрута парковки). В одном или нескольких вариантах осуществления настоящего изобретения, когда обнаруженный объект OB не является движущимся объектом (или является стационарным объектом), делается определение, что есть изменение фактора среды парковки, и делается запрос оператору М относительно того, нужно или нет выполнять второе управление.
[0069]
Движущийся объект, который просто проходит, не препятствует выполнению управления парковкой, но движущийся объект, который подходит и стоит или перемещается назад и вперед, может препятствовать выполнению управления парковкой. С точки зрения того, что предпочтительно определять, что существует «изменение фактора среды парковки» на основе движущегося объекта, который подходит и стоит или перемещается назад и вперед, «движущиеся объекты» в вышеупомянутом факторе среды парковки могут быть ограничены теми, кто движется со скоростью (величина изменения положения), равной или превышающей предопределенное значение, или теми, которые движутся во множестве направлений. То есть, когда обнаруживается объект, движущийся со скоростью, меньшей предопределенной величины, или объект, движущийся во множестве направлений, делается определение, что объект «не является движущимся объектом (или является стационарным объектом)» и определено, что есть изменение фактора среды парковки.
Когда объект OB является стационарным объектом, объектом, движущимся со скоростью, равной или меньшей предварительно определенной величины, или объектом, движущимся в разных направлениях движения, отображается положение объекта OB, обнаруженного во второй момент времени, и отображается кнопка «Rescue» для запроса оператору М о том, необходимо или нет выполнить второе управление.
[0070]
Только когда обнаруживается стационарный объект, который с высокой вероятностью может создавать помехи первому управлению, может быть сделан запрос относительно того, необходимо или нет выполнять второе управление. Когда обнаруженный объект OB является движущимся объектом, как показано на фиг. 10B, оператор M не делает запрос относительно того, необходимо или нет выполнять второе управление, и оператор может быть лишен чувства беспокойства и тревоги. Когда обнаруженный объект OB является движущимся объектом, без выполнения запроса относительно того, необходимо ли выполнять второе управление, в то время как, когда обнаруженный объект OB является стационарным объектом, путем выполнения запроса относительно того, необходимо ли выполнить второе управление, переключение на второе управление может быть выполнено быстро, не вызывая у оператора М беспокойства и тревоги.
[0071]
Дополнительно или альтернативно, критерий для устройства 10 управления, чтобы определять, что есть изменение фактора среды парковки, может быть определен ситуацией, в которой объект, обнаруженный после начала выполнения первой инструкции управления, является препятствием, которое препятствует движению транспортного средства. Другими словами, критерий для определения того, что есть изменение фактора среды парковки, может быть определен ситуацией, в которой объект, обнаруженный после начала выполнения первой инструкции управления, не является не препятствием, которое не препятствует движению транспортного средства. Как описано выше, не препятствие в одном или нескольких вариантах осуществления настоящего изобретения представляет собой объект, который не препятствует движению транспортного средства V, такой как движущийся объект, объект, имеющий высоту 20 см или менее, объект имеющие высоту 10 см или менее, мусор, ступень с перепадом уровней 20 см или менее, ступень с перепадом уровней 10 см или менее, упавший лист или трава. Даже когда объект, который не препятствует движению, обнаруживается вновь, делается определение, что фактор среды парковки не изменяется.
[0072]
Даже когда объект OB обнаружен, Объект OB может быть не препятствием, которое не препятствует движению транспортного средства. Если запрос о переключении на второе управление сделан для не препятствия, запрос может вызвать у оператора М чувство беспокойства и тревоги. Когда объект OB имеет атрибут, который классифицируется как не препятствие, устройство 10 управления не делает запрос оператору M о переключении на второе управление. Когда объект OB является не препятствием, оператору M не делается запрос о том, необходимо или нет выполнять второе управление, и оператор может быть лишен чувства беспокойства и тревоги. Когда обнаруженный объект OB является не препятствием, без запроса о том, необходимо ли выполнять второе управление, в то время как, когда обнаруженный объект OB является препятствием (не является не препятствием), путем запроса необходимо или нет выполнять второе управление, переключение на второе управление может быть выполнено быстро, не заставляя оператора М чувствовать беспокойство и тревогу.
[0073]
На этапе 111 устройство 10 управления определяет, введена или нет инструкция выполнения для второго управления. Когда оператор, который находит информацию представления вышеописанного запроса о переключении на второе управление, нажимает или касается кнопки «Rescue», устройство 10 управления определяет, что инструкция выполнения для второго управления введена, и процесс переходит к этапу 112.
[0074]
На этапе 111 устройство 10 управления может принять инструкцию выполнения для второго управления от оператора М и определить, можно ли продолжить первое управление и следует ли приостанавливать/отменять выполнение первого управления, а не только прием инструкции выполнения для второго управления. Устройство 10 управления определяет, может ли транспортное средство двигаться к целевому пространству парковки. Когда начинается выполнение первого управления, устройство 10 управления получает информацию обнаружения окружающих объектов (препятствий) в преопределенном цикле и определяет, может ли транспортное средство V1 двигаться по первому маршруту. Когда начинается выполнение первого управления, устройство 10 управления получает информацию обнаружения целевого пространства парковки в предварительно определенном цикле и определяет, может ли транспортное средство V1 войти в целевое пространство парковки. Устройство 10 управления определяет, может ли транспортное средство V1 двигаться по первому маршруту, не будучи заблокированным каким-либо объектом. Когда движение по первому маршруту невозможно, устройство 10 управления определяет, что выполнение первого управления должно быть приостановлено или отменено. В этом случае процесс устройства 10 управления может перейти к этапу 112 перед приемом инструкции выполнения для второго управления. Устройство 10 управления может приостановить или отменить выполнение первого управления и выполнить процесс переключения на второе управление.
[0075]
На этапе 112 устройство 10 управления может приостановить или отменить первое управление, и процесс переходит к этапу 113, на котором устройство 10 управления может выполнять процесс переключения на второе управление. Устройство 10 управления выполняет процесс вычисления второго маршрута, проиллюстрированного на этапе 113, параллельно с процессом этапа 112 или до или после процесса этапа 112. Второй маршрут - это маршрут для удаления транспортного средства V1 от целевого пространства парковки ( маршрут для удаления транспортного средства V1 от целевого пространства парковки), (маршрут, чтобы сделать пространство между этим транспортным средством V1 и целевым пространством парковки) (маршрут, чтобы вынудить транспортное средство V1 выйти из целевого пространства парковки). Второй маршрут в одном или нескольких вариантах осуществления настоящего изобретения используется в режиме восстановления (режиме возврата) для возврата/восстановления из состояния, в котором управление парковкой приостановлено/отменено. Режим спасения относится к процессу, который выполняется как аварийное предотвращение, когда продолжение процесса управления парковкой затруднено и движение к целевому положению парковки приостановлено/отменено. Режим спасения представляет собой процесс движения транспортного средства V1 субъекта таким образом, чтобы вынудить транспортное средство V1 субъекта отдалиться от целевого пространства парковки (так, чтобы удалить транспортное средство V1 субъекта от целевого пространства парковки), (так, что транспортное средство V1 субъекта является/становится удаленным от целевого пространства парковки) (так, что транспортное средство V1 субъекта покидает целевое пространство парковки), которое было установлено до выполнения режима спасения. Устройство 10 управления 10 может вычислять траекторию для избежания объекта, который вызывает приостановку/отмену движения в целевое положение парковки, как второй маршрут (маршрут в режиме спасения). Как будет понятно, второй маршрут может быть таким же, как первый маршрут к целевому пространству парковки, и устройство 10 управления может изменять направление перемещения вдоль маршрута для вычисления второго маршрута для движения транспортного средства V1 субъекта в противоположном направлении по первому маршруту. Второй маршрут, вычисленный в режиме спасения, может быть траекторией для движения (возврата) в положение, в котором был начат процесс парковки.
[0076]
При вычислении второго маршрута на этапе 114 устройство 10 управления устанавливает пространство для эвакуации. В одном или нескольких вариантах осуществления настоящего изобретения устройство 10 управления может устанавливать пространство для эвакуации в положении, удаленным от объекта на предопределенное расстояние или более, и вычислять второй маршрут к заданному пространству для эвакуации. Второй маршрут получается после установки пространства для эвакуации, и поэтому транспортное средство V1 может быть направлено в положение, удаленное от объекта на предварительно определенное расстояние или более.
[0077]
За этапом 114 следует этап 115, на котором устройство 10 управления генерирует вторую инструкцию управления для движения транспортного средства V по вычисленному второму маршруту. Устройство 10 управления предварительно сохраняет информацию о спецификации транспортного средства V, необходимую для вычисления инструкции управления. Примеры второй инструкции управления включают в себя рабочие инструкции для величины рулевого управления, скорости рулевого управления, ускорения рулевого управления, положения переключения, скорости (включая ноль), ускорения и замедления транспортного средства V, которые связаны с моментом времени или положением, когда транспортное средство V перемещается по маршруту парковки, и другие рабочие инструкции. Вторая инструкция управления включает в себя время выполнения или положение выполнения вышеупомянутой рабочей инструкции для транспортного средства V. Инструкция, касающаяся маршрута парковки, и рабочая инструкция, связанная с маршрутом парковки, выполняются транспортным средством V, и, таким образом, транспортное средство V может быть перемещено (припарковано) в целевое положение парковки. Когда вводится команда выполнения для второго управления, устройство 10 управления выполняет процесс движения транспортного средства V1 субъекта по второму маршруту для удаления от целевого пространства парковки. Направление движения и расстояние передвижения по траектории для удаления от целевого пространства парковки не ограничены.
[0078]
Обращаясь снова к фиг. 4, на этапе S116 устройство 10 управления выполняет второе управление на основе второй инструкции управления. Таким образом, когда команда выполнения для второго управления вводится оператором М, устройство 10 управления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения приостанавливает или отменяет выполнение первой инструкции управления, вычисляет второй маршрут для удаления транспортного средство V1 из целевого пространства парковки в большей степени, чем в предыдущем состоянии, генерирует или получает вторую инструкцию управления для движения транспортного средства по второму маршруту и выполняет вторую инструкцию управления. Таким образом, когда фактор среды парковки изменяется, вторая инструкция управления (режим спасения) может быть быстро выполнена в соответствии с намерением оператора М. После того, как второе управление завершено, транспортное средство V1 управляется для движения в пространство для эвакуации. Эвакуационное пространство не является пространством парковки, и поэтому необходимо двигать транспортное средство V1 на пространство парковки.
[0079]
На этапе 117, когда снова вводится инструкция выполнения для первого управления для движения транспортного средства в целевое пространство парковки, выполняются процессы этапа 118 и последующих этапов, чтобы снова двигать транспортное средство в целевое пространство парковки.
[0080]
На этапе 118 устройство 10 управления обнаруживает объекты вокруг транспортного средства V1. На этапе 119 устройство 10 управления снова устанавливает целевое пространство парковки. На этапе 119 устройство 10 управления вычисляет маршрут парковки (первый маршрут) к целевому пространству парковки. Маршрут парковки включает в себя положение поворота для парковки, необходимое для движения на пространство парковки. Для этой операции маршрут парковки определяется как линия, а также определяется как полосообразная область, соответствующая занятой области транспортного средства V, на основе ширины транспортного средства. Занятая область транспортным средством V определяется с учетом ширины транспортного средства и ширины запаса, обеспечиваемой для движения. Устройство 10 управления подтверждает, что никакие объекты не обнаружены в пределах занятой области.
[0081]
На этапе 120 устройство 10 управления генерирует рабочую инструкцию для движения транспортного средства V по вычисленному маршруту парковки. Устройство 10 управления предварительно сохраняет информацию о спецификации транспортного средства V, необходимую для инструкции управления. Примеры инструкции управления включают в себя рабочие инструкции для величины рулевого управления, скорости рулевого управления, ускорения рулевого управления, положения переключения, скорости (включая ноль), ускорения и замедления транспортного средства V, которые связаны с моментом времени или положением, когда транспортное средство V движется вдоль маршрута парковки, и другие рабочие инструкции. Инструкция управления включает в себя время выполнения или положение выполнения вышеупомянутой рабочей инструкции для транспортного средства V. Инструкция, касающаяся маршрута парковки, и рабочая инструкция, связанная с маршрутом парковки, выполняются транспортным средством V, и, таким образом, транспортное средство V может двигаться (парковаться) до целевого положения парковки. Инструкция управления согласно одному или нескольким вариантам осуществления настоящего изобретения включает в себя инструкцию остановки для транспортного средства V во втором положении. Дополнительно или в качестве альтернативы, инструкция управления может включать в себя операцию открытия двери транспортного средства V во втором положении.
[0082]
На этапе 121 устройство 10 управления отслеживает изменение среды вокруг транспортного средства V до тех пор, пока транспортное средство V не достигнет положения поворота для парковки. Когда транспортное средство V достигает положения поворота для парковки, переключение передач, включенное в инструкцию управления, выполняется на этапе 122. За этапом 122 следует этап 123, на котором управление парковкой завершается путем последовательного выполнения инструкций управления.
[0083]
Аппаратура 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения управляет работой системы 40 привода через контроллер 70 транспортного средства в соответствии с инструкцией управления, так что транспортное средство V движется по маршруту парковки. Аппаратура 100 управления парковкой вычисляет командные сигналы для системы 40 привода транспортного средства V, такой как электродвигатель EPS, одновременно возвращая выходное значение датчика 50 угла поворота рулевого устройства, так что траектория движения транспортного средства V совпадает с рассчитанным маршрутом парковки, и передает командные сигналы в систему 40 привода или в контроллер 70 транспортного средства, который управляет системой 40 привода.
[0084]
Аппаратура 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя блок управления для управления парковкой. Блок управления для управления парковкой получает информацию о диапазоне переключения передач от блока управления AT/CVT, информацию о скорости вращения колес от блока управления ABS, информацию об угле поворота рулевого колеса от блока управления углом поворота рулевого колеса, информацию о скорости вращения двигателя от ECM и другую необходимую информацию. На основе этих элементов информации блок управления для управления парковкой вычисляет и выводит информацию об инструкциях по автономному рулению на блок управления EPS, информацию об инструкциях, такую как предупреждение блоку управления счетчиком, и т.д. Устройство 10 управления получает элементы информации, которые получают датчиком 50 угла поворота рулевого устройства транспортного средства V, датчиком 60 скорости транспортного средства и другими датчиками транспортного средства V через контроллер 70 транспортного средства.
[0085]
Система 40 привода в соответствии с одним или несколькими вариантами осуществления настоящего изобретения приводит в движение транспортное средство V1 для движения (перемещения) из текущего положения в целевое положение парковки путем вождения на основе сигналов команды управления, полученных от аппаратуры 100 управления парковкой. Аппаратура рулевого управления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения представляет собой приводной механизм, который перемещает транспортное средство V в правом и левом направлениях. Электродвигатель EPS, включенный в систему 40 привода, приводит в действие механизм рулевого управления с усилителем рулевого управления устройства рулевого управления на основе сигналов команды управления, полученных от аппаратуры 100 управления парковкой, для управления величиной рулевого управления и управления работой при движении транспортного средства V в целевое положение парковки. Контент управления и схема работы для парковки транспортного средства V конкретно не ограничены, и любая схема, известная на момент подачи настоящей заявки, может быть соответствующим образом применена.
[0086]
Когда аппаратура 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения управляет транспортным средством V для движения в целевое положение парковки по маршруту, вычисленному на основе положения транспортного средства V и положения целевого положения парковки, акселератор и тормоз управляются автономно на основе назначенной управляющей скорости транспортного средства (заданной скорости транспортного средства), а работа устройства рулевого управления управляет движением транспортного средства V автономным образом в соответствии со скоростью транспортного средства.
[0087]
Способ управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения используется в устройстве управления парковкой, как указано выше, и поэтому демонстрирует следующие эффекты. Аппаратура 100 управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения сконфигурирована и работает, как указано выше, и, следовательно, проявляет следующие эффекты.
[0088]
(1) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда изменение фактора среды парковки, такое как обнаружение объекта, обнаружено вокруг транспортного средства, оператору делается запрос необходимо или нет выполнять второе управление для удаления транспортного средства от целевого пространства парковки без во всех случаях/единообразной остановки транспортного средства и, следовательно, переход ко второму управлению может быть быстро выполнен в ответ на изменение фактора среды парковки.
[0089]
(2) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда команда выполнения для второго управления вводится оператором M, устройство 10 управления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения приостанавливает или отменяет выполнение первой инструкции управления, вычисляет второй маршрут для удаления транспортного средства V1 от целевого пространства парковки, генерирует или получает вторую инструкцию управления для движения транспортного средства по второму маршруту и выполняет вторую инструкцию управления. Таким образом, когда фактор среды парковки изменяется, вторая инструкция управления (режим спасения) может быть быстро выполнена в соответствии с намерением оператора М.
[0090]
(3) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения при сравнении между первым фактором среды парковки транспортного средства, обнаруженным во время начала выполнения первой инструкции управления, и вторым фактором среды парковки транспортного средства, обнаруженного после начала выполнения первой инструкции управления, когда величина изменения между первым значением оценки первого фактора среды парковки и вторым значением оценки второго фактора среды парковки не меньше, чем предопределенное значение, устройство 10 управления определяет, что в среде парковки происходит изменение. Посредством количественного определения того, есть ли изменение фактора среды парковки, на основе величины изменения между первым значением оценки первого фактора среды парковки и вторым значением оценки второго фактора среды парковки, момент времени запроса о выполнении второго управления может быть определен точно и надлежащим образом.
[0091]
(4) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда новый объект обнаруживается на первом маршруте после начала выполнения первой инструкции управления, оператор M может сделать запрос необходимо или нет выполнить второе управление. Фактор среды парковки, который может быть обнаружен устройством 10 управления, изменяется каждый момент времени, когда транспортное средство V1 движется, и, следовательно, новый объект может быть обнаружен на первом маршруте после начала выполнения первой инструкции управления. В таком случае может быть трудно перемещать транспортное средство V1 по первому маршруту, который был предварительно установлен. Когда новый объект обнаружен на первом маршруте, посредством запроса оператору М относительно того, необходимо ли выполнять второе управление, переключение на второе управление для удаления от целевого пространства парковки может быть быстро выполнено.
[0092]
(5) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда обнаруживается изменение предопределенной значения или более в положении или размере целевого пространства парковки после начала выполнения первой инструкции управления оператор M может сделать запрос относительно того, необходимо или нет выполнять второе управление. Среда обнаружения изменяется по мере движения транспортного средства V1; следовательно, контур другого припаркованного транспортного средства может быть точно не обнаружен, остановка для пространства парковки может не быть точно обнаружена, и/или положение или размер целевого пространства парковки, обнаруженные ранее, могут измениться после начала выполнения первой инструкции управления. В таком случае может быть затруднительно двигать транспортное средство V1 по первому маршруту в целевое пространство парковки, которое было предварительно установлено. Когда изменение в положении или размере целевого пространства парковки на преопределенную величину или более обнаружено после начала выполнения первой инструкции управления, посредством запроса оператору М относительно того, необходимо ли выполнять второе управление, переключение на второе управление для удаления от целевого пространства парковки может быть выполнено быстро.
[0093]
(6) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда обнаруживается изменение предопределенного значения или более в положении или размере объекта после начала выполнения первой инструкции управления, оператору М может быть сделан запрос о том, необходимо ли выполнять второе управление. Среда обнаружения изменяется по мере движения транспортного средства V1; следовательно, положение или размер объекта могут быть точно не обнаружены. После начала выполнения первой инструкции управления положение или размер обнаруженного ранее объекта могут измениться. В таком случае может быть трудно двигать транспортное средство V1 по первому маршруту, который был предварительно установлен. Когда изменение в положении или размере объекта на преопределенную величину или более обнаружено после начала выполнения первой инструкции управления, путем запроса оператора M относительно того, необходимо ли выполнять второе управление, переключение на второе управление для удаления от целевого пространства парковки может быть выполнено быстро.
[0094]
(7) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда обнаруживается изменение предопределенного значения или более в позиции оператора M, оператор M может сделать запрос о том, или нет, необходимо выполнить второе управление. Оператор М может двигаться, когда транспортное средство V1 движется. Положение оператора М, обнаруженное после начала выполнения первой инструкции управления, может измениться с положения оператора М, обнаруженного ранее. В таком случае может быть трудно двигать транспортное средство V1 по первому маршруту, который был предварительно установлен. Когда после начала выполнения первой инструкции управления обнаруживается изменение положения оператора M на преопределенную величину или более, путем запроса оператора M относительно того, необходимо или нет выполнять второе управление, переключение на второе управление для удаления от целевого пространства парковки может быть выполнено быстро. Когда обнаруживается перемещение оператора M на преопределенное расстояние или более, может быть сделано определение, что весьма вероятно, что оператор M замечает что-то и пытается подтвердить это. В таком случае можно быстро подтвердить, может ли быть выполнено второе управление, и, следовательно, может быть улучшена возможность использования системы управления парковкой посредством дистанционного управления.
[0095]
(8) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, только когда обнаружен стационарный объект, который с высокой вероятностью может создавать помехи первому управлению, может быть сделан запрос относительно того, является ли необходимым выполнить второе управление. Когда обнаруженный объект OB является движущимся объектом, оператору М не делается запрос относительно того, необходимо ли выполнять второе управление, и может быть предотвращено беспокойство оператора. Когда обнаруженный объект OB является движущимся объектом, без выполнения запроса относительно того, необходимо ли выполнять второе управление, в то время как, когда обнаруженный объект OB является стационарным объектом, путем выполнения запроса относительно того, необходимо ли выполнить второе управление, переключение на второе управление может быть выполнено быстро, не вызывая у оператора М беспокойства.
[0096]
(9) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда объект OB имеет атрибут, который классифицируется как не препятствие, можно не делать запрос о переключении на второе управление. Даже когда объект OB обнаружен, объект OB может быть не препятствием, которое не препятствует движению транспортного средства. Если запрос о переключении на второе управление сделан для не препятствия, этот запрос может вызвать у оператора М беспокойство. В одном или нескольких вариантах осуществления настоящего изобретения, когда объект OB имеет атрибут, который классифицируется как не препятствие, оператору M не делается запрос о переключении на второе управление. Когда объект OB является не препятствием, оператор M не запрашивается, нужно ли выполнять второе управление, и оператор может не испытывать беспокойства. Когда обнаруженный объект OB является не препятствием, без запроса о том, необходимо ли выполнять второе управление, в то время как, когда обнаруженный объект OB является препятствием (не является не препятствием), путем запроса, необходимо или нет выполнять второе управление, переключение на второе управление может быть выполнено быстро, не вызывая у оператора М беспокойства.
[0097]
(10) В способе управления парковкой в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда есть изменение фактора среды парковки, дисплей, запрашивающий о вводе команды выполнения для второй инструкции управления, представляется на операционном терминале 5 способном к осуществлению связи, и, следовательно, возможно быстро подтвердить намерение оператора M относительно переключения на второе управление для удаления от целевого пространства парковки, а также быстро выполнить второе управление.
[0098]
(11) Также и в аппаратуре 100 управления парковкой, в которой исполняется способ в соответствии с одним или более вариантами осуществления настоящего изобретения, демонстрируются действия и эффекты, описанные в вышеприведенных пунктах (1) - (10).
[0099]
Варианты осуществления, включают в себя все конструктивные изменения и эквиваленты, подпадающие под технический объем настоящего изобретения. Поэтому предполагается, что элементы, раскрытые в вышеуказанных вариантах осуществления, включают в себя все изменения в конструкции и эквиваленты, подпадающие под объем технических сведений в настоящем изобретении.
[Описание позиционных обозначений]
[0100]
1000 - Система управления парковкой
100 - Аппаратура управления парковкой
10 - Устройство управления
11 - CPU (ЦП)
12 - ROM (ПЗУ)
13 - RAM (ОЗУ)
132 - запоминающее устройство
133 - Информация карты
134 - Информация места парковки
135 - Информация объекта
20 - Входное устройство
21 - Устройство связи
211 -Антенны
30 - Выходное устройство
31 - Дисплей
1a-1d - Камеры
2 - устройства ранжирования
3 - Информационный сервер
31 - Устройство связи
32 - запоминающее устройство
33 - Информация карты
34 - Информация места парковки
35 Информация объекта
5 - Операционный терминал
51 - Устройство связи
511 - Антенна
52 - Входное устройство
53 - Дисплей
200 - Бортовое устройство
40 - Система привода
50 - Датчик угла поворота рулевого колеса
60 - Датчик скорости транспортного средства
70 Контроллер транспортного средства
V, V1 - транспортное средство
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2742530C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2736960C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2735340C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2738780C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2740661C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И АППАРАТУРА УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2744447C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2740111C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И АППАРАТУРА УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2736520C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И ОБОРУДОВАНИЕ УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2746684C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2733300C1 |
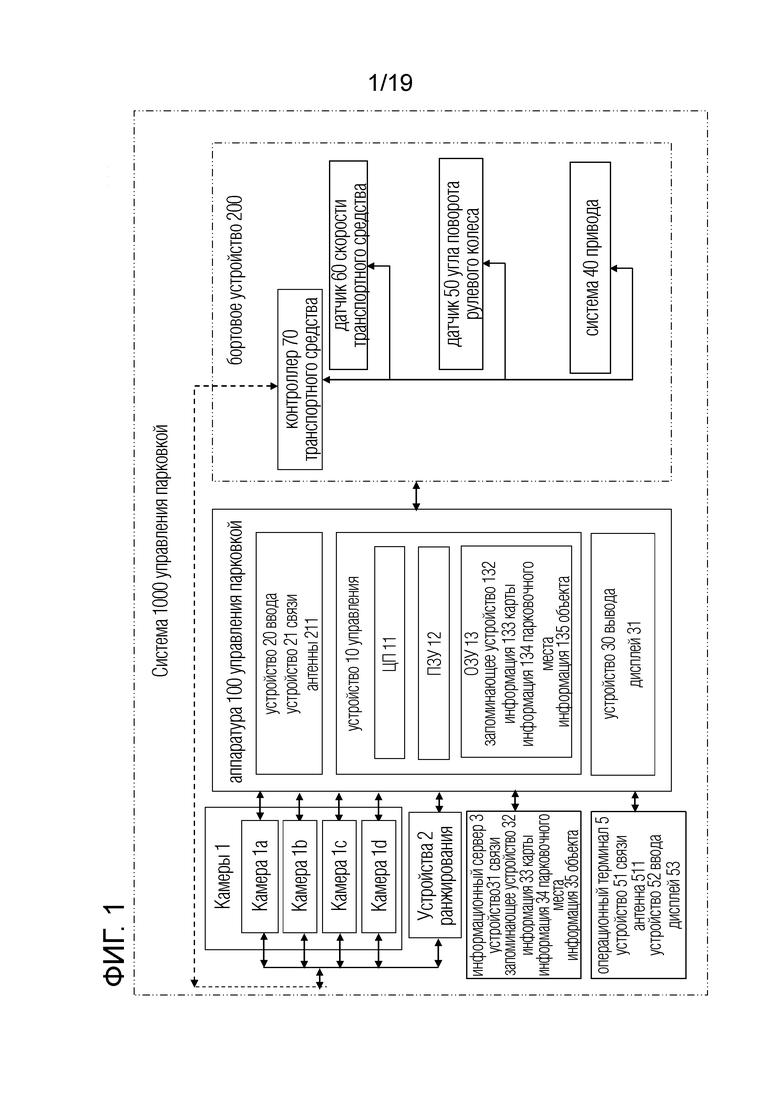
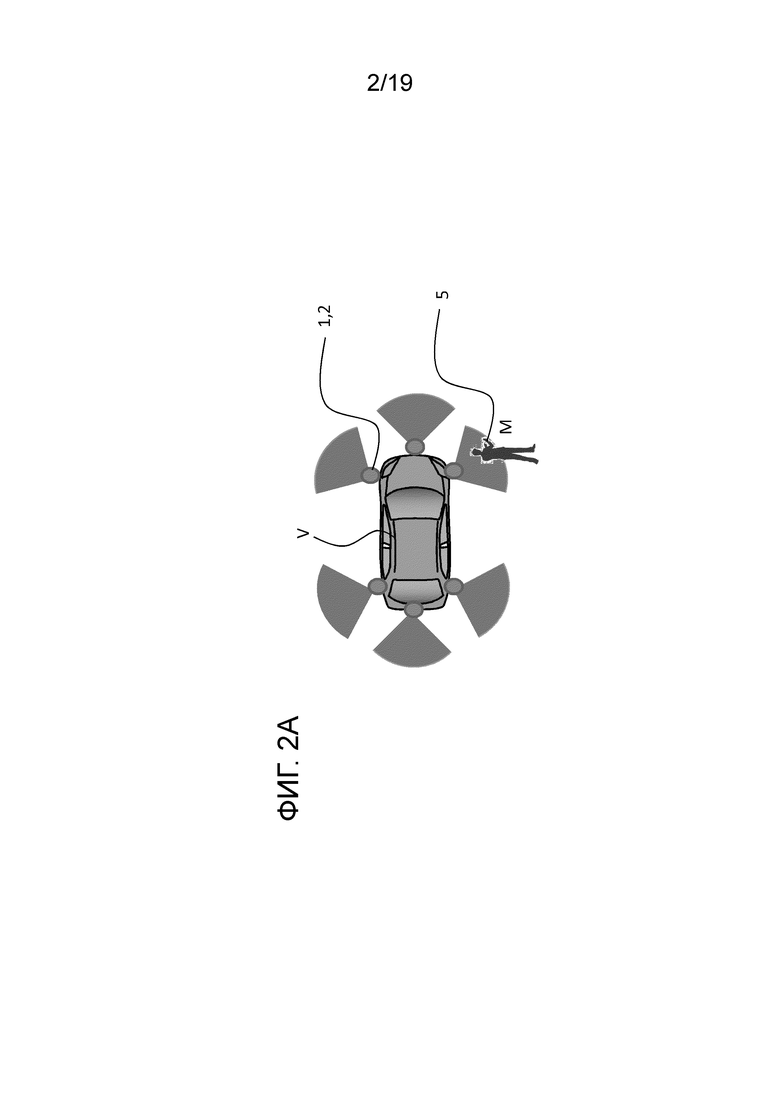
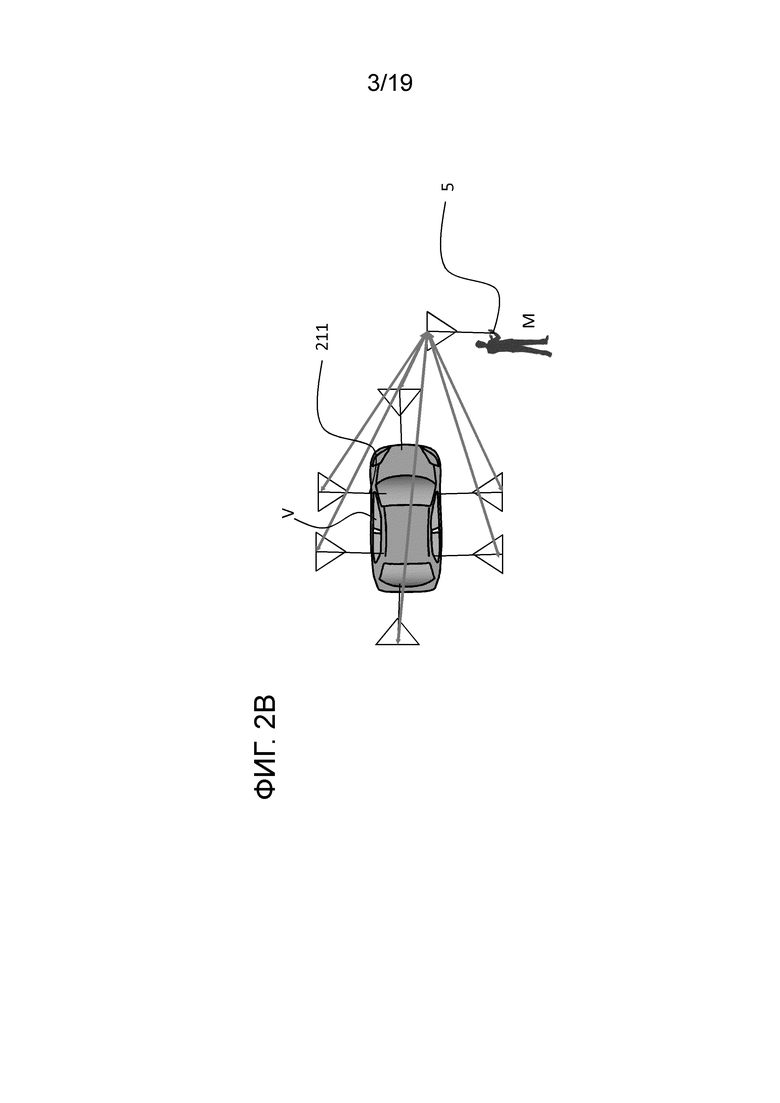
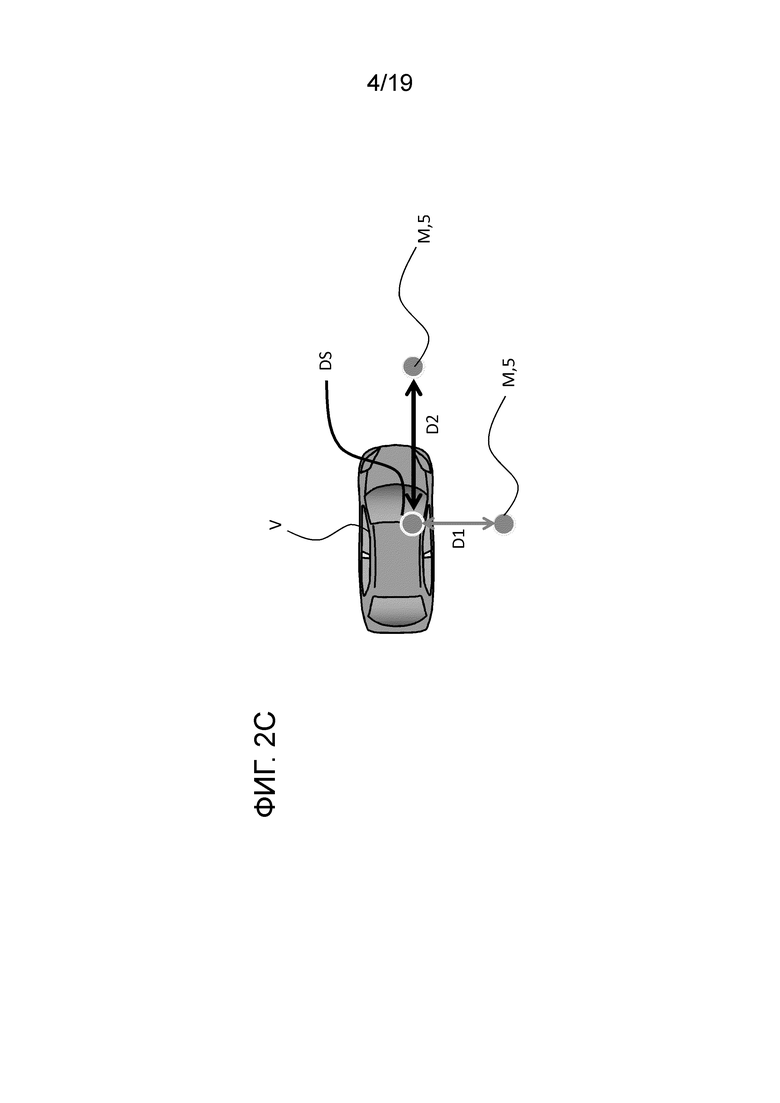

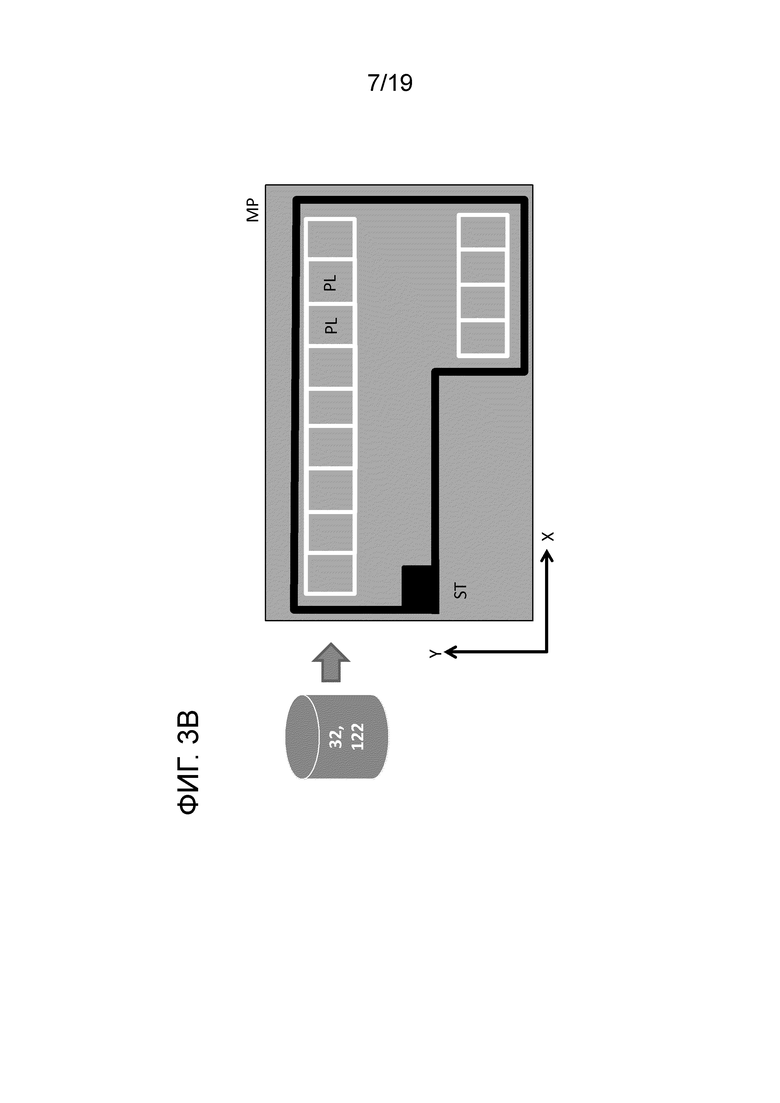
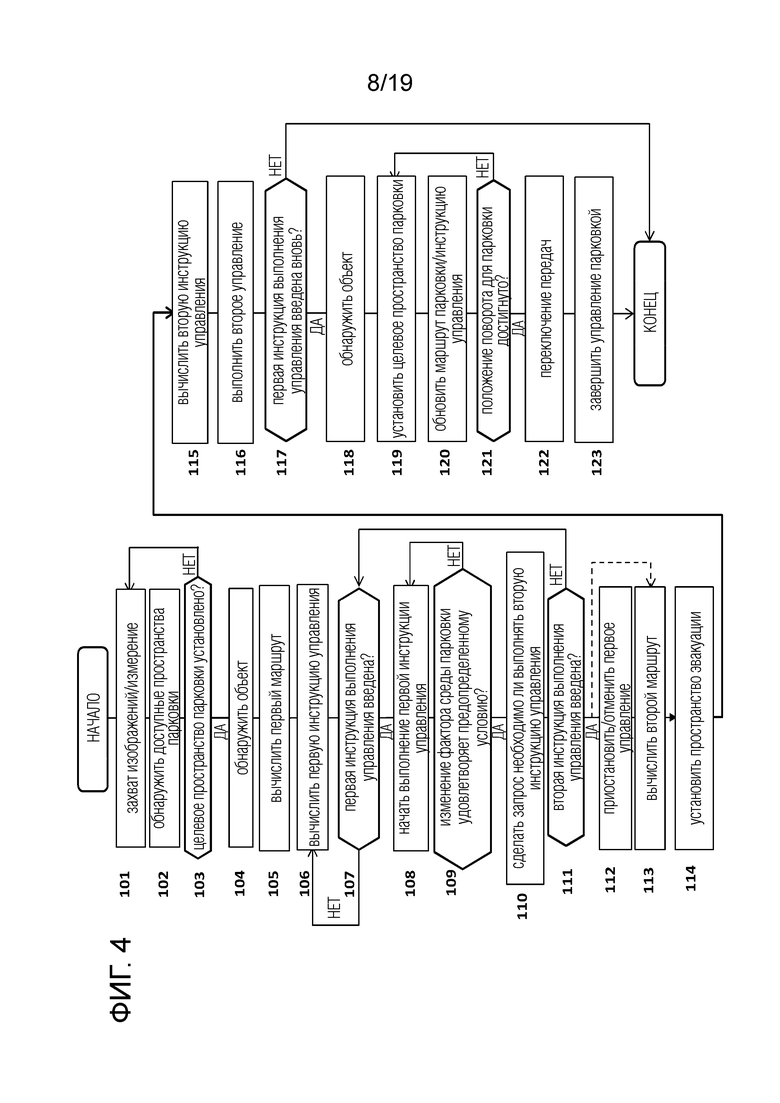


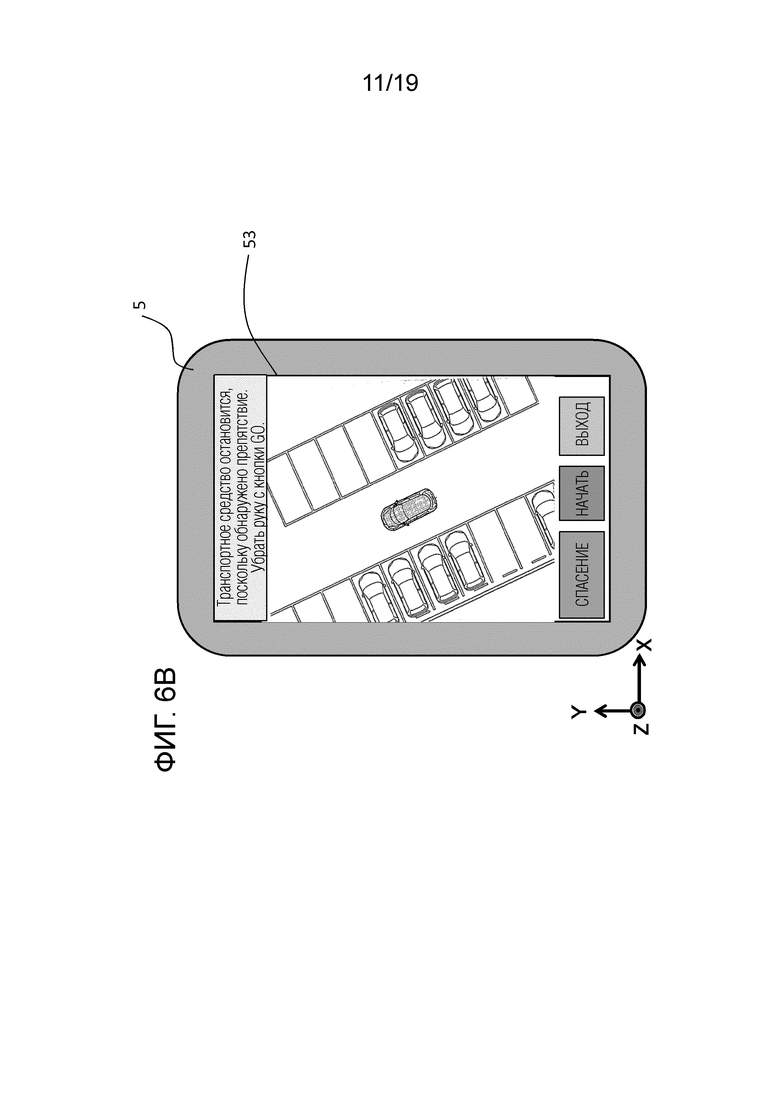
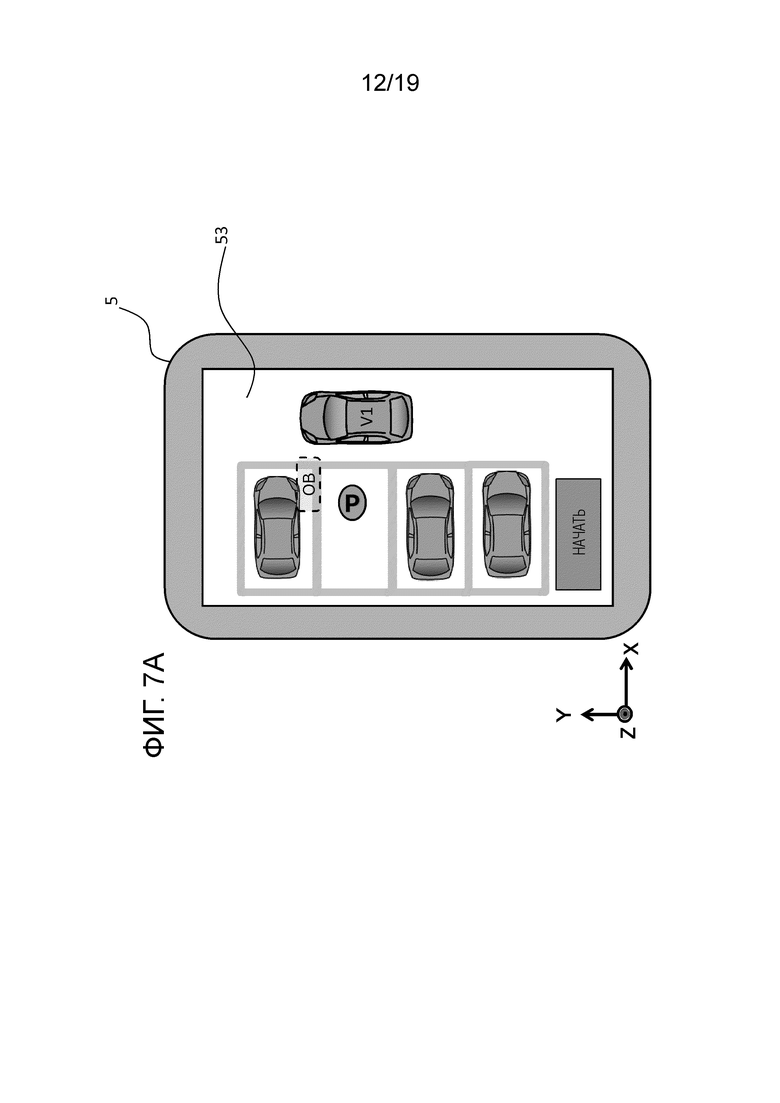

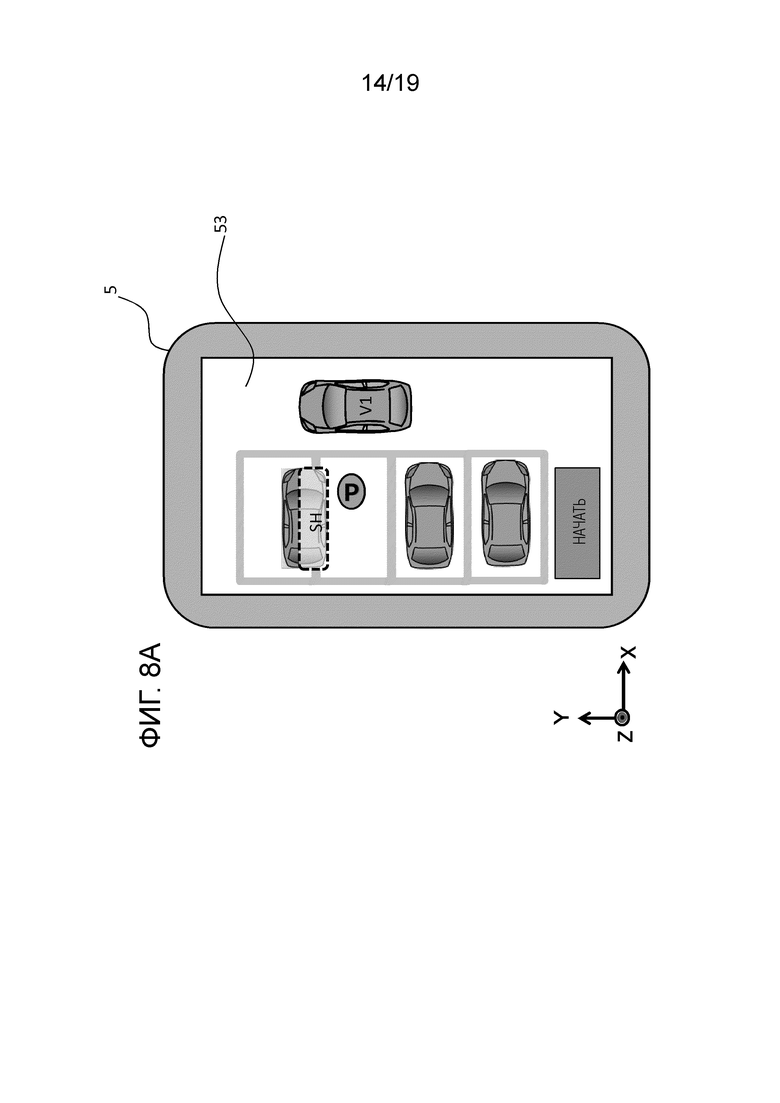
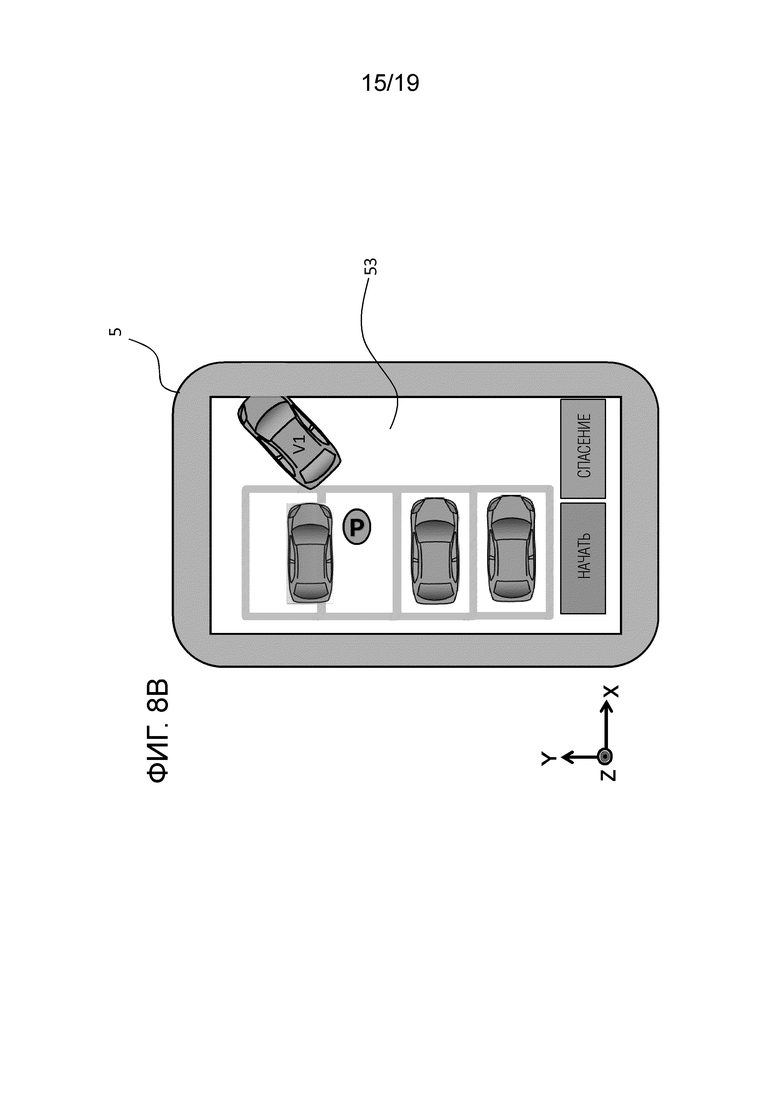
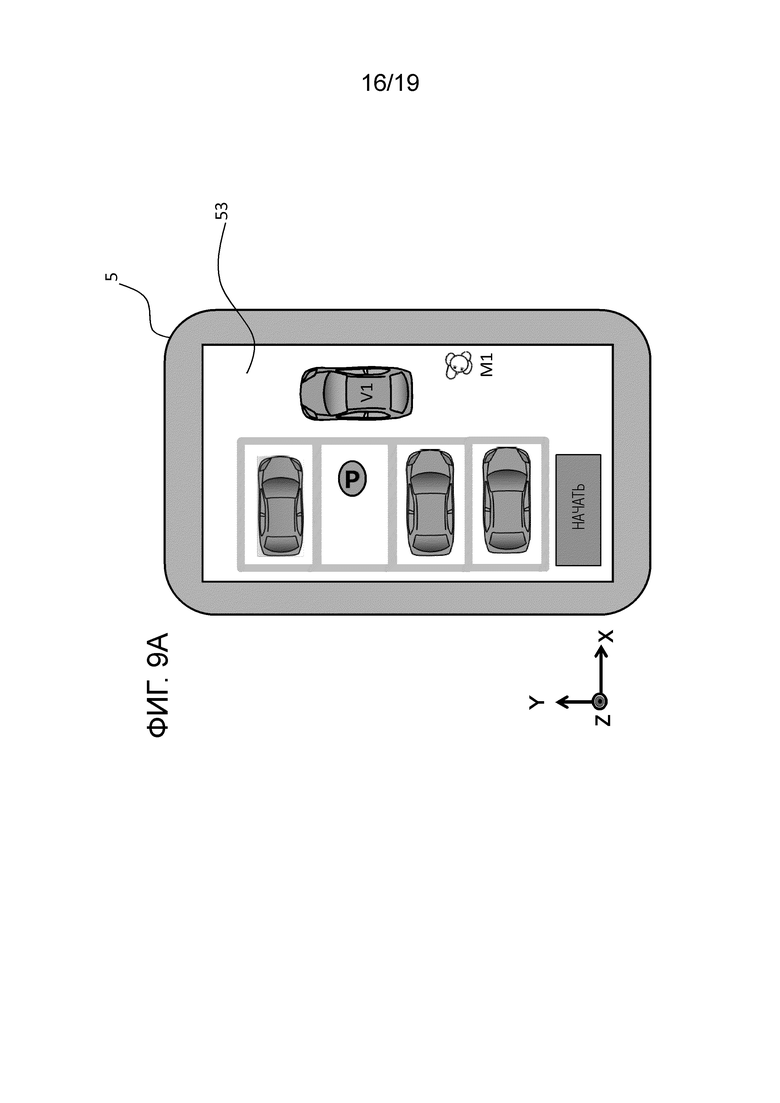
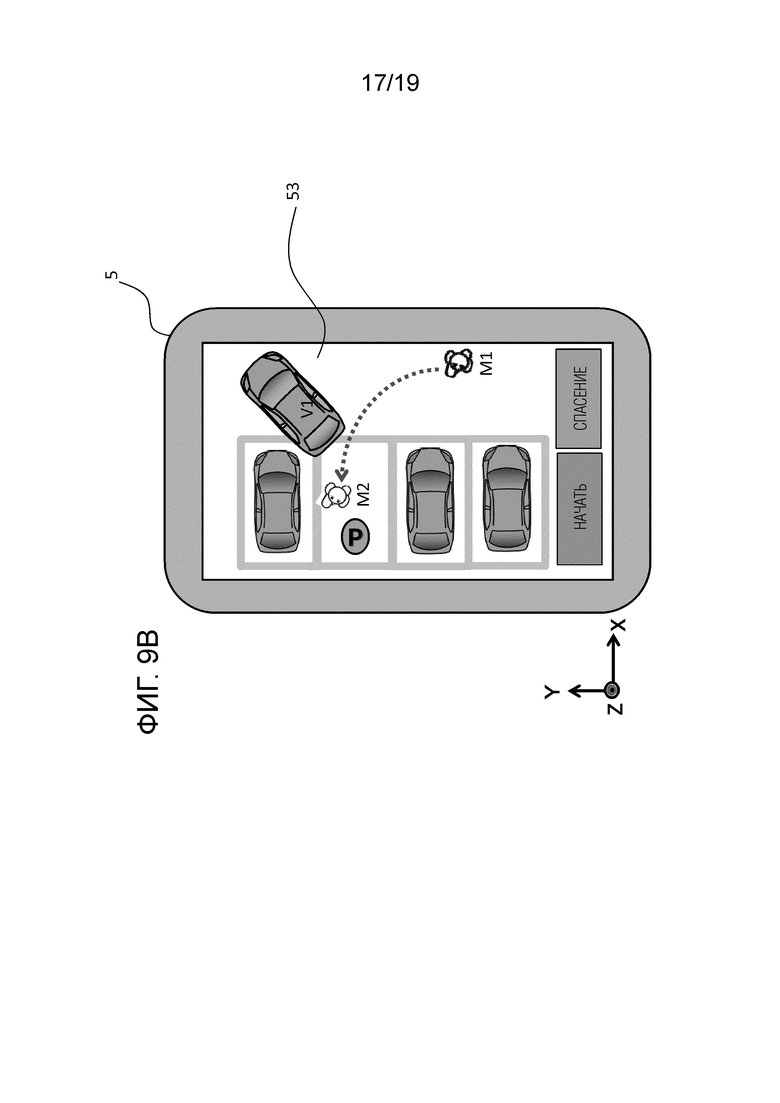
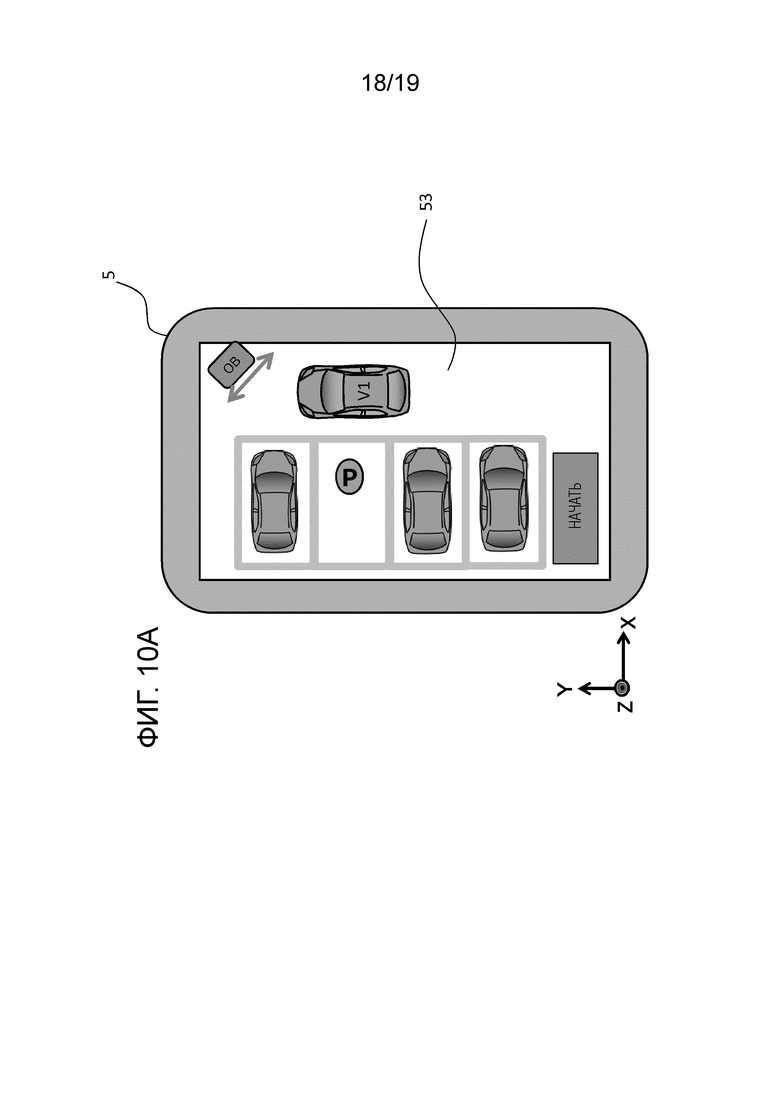
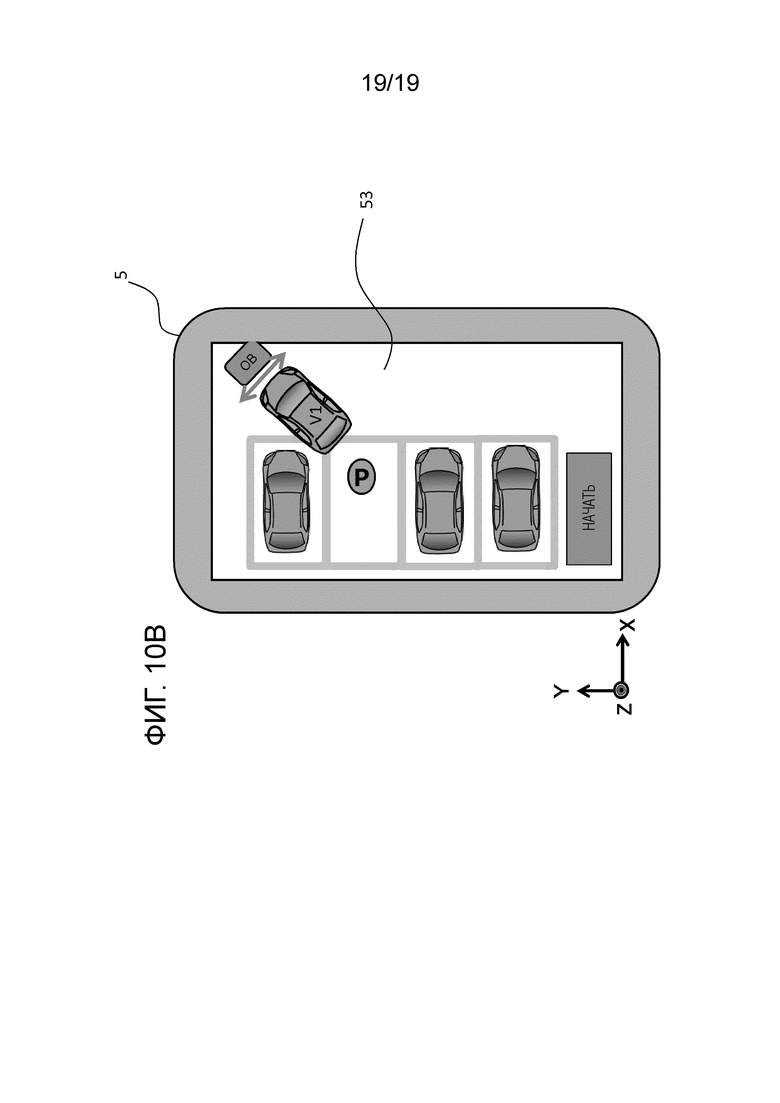
Изобретение относится к способу управления парковкой и аппаратуре управления парковкой. Способ управления парковкой для побуждения устройства управления транспортным средством выполнять первую инструкцию управления на основе рабочей команды содержит этап, на котором, когда есть изменение фактора среды парковки транспортного средства, обнаруженного после начала выполнения первой инструкции управления, относительно фактора среды парковки транспортного средства, обнаруженного до начала выполнения первой инструкции управления, приостанавливают или отменяют выполнение первой инструкции управления и делают запрос оператору относительно того, необходимо ли выполнять вторую инструкцию управления для движения транспортного средства так, что транспортное средство удаляется от целевого пространства парковки в большей степени, чем в состоянии, когда первая инструкция управления приостановлена или отменена. Аппаратура управления парковкой содержит устройство управления, сконфигурированное для выполнения первой инструкции управления на основе рабочей команды, полученной от оператора, причем первая инструкция управления предназначена для движения транспортного средства по первому маршруту в целевое пространство парковки. Достигается своевременное обнаружение объектов, препятствующих парковке 2 н. и 9 з.п. ф-лы, 19 ил.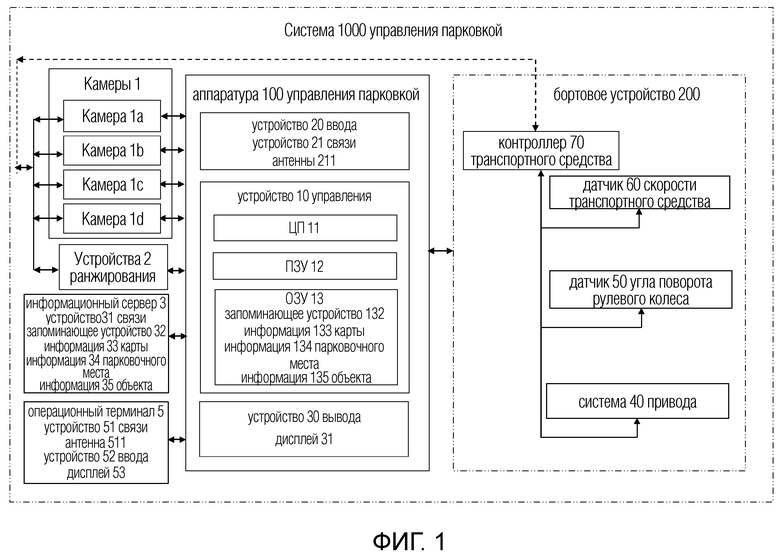
1. Способ управления парковкой для побуждения устройства управления транспортным средством выполнять первую инструкцию управления на основе рабочей команды, полученной от оператора, причем первая инструкция управления предназначена для движения транспортного средства по первому маршруту к целевому пространству парковки, при этом способ управления парковкой содержит этап, на котором:
когда есть изменение фактора среды парковки транспортного средства, обнаруженного после начала выполнения первой инструкции управления, относительно фактора среды парковки транспортного средства, обнаруженного до начала выполнения первой инструкции управления, приостанавливают или отменяют выполнение первой инструкции управления; и
делают запрос оператору относительно того, необходимо ли выполнять вторую инструкцию управления для движения транспортного средства так, что транспортное средство удаляется от целевого пространства парковки в большей степени, чем в состоянии, когда первая инструкция управления приостановлена или отменена.
2. Способ управления парковкой по п.1, содержащий этапы, на которых:
приостанавливают или отменяют выполнение первой инструкции управления, когда от оператора вводится команда выполнения для второго управления;
вычисляют второй маршрут для удаления транспортного средства от целевого пространства парковки;
генерируют или получают вторую инструкцию управления для движения транспортного средства по второму маршруту; и
побуждают устройство управления выполнять вторую инструкцию управления.
3. Способ управления парковкой по п.1 или 2, содержащий этапы, на которых:
сравнивают первый фактор среды парковки транспортного средства, обнаруженный до начала выполнения первой инструкции управления, со вторым фактором среды парковки транспортного средства, обнаруженным после начала выполнения первой инструкции управления; и
когда величина изменения между первым значением оценки первого фактора среды парковки и вторым значением оценки второго фактора среды парковки является предопределенной величиной или более, определяют, что есть изменение фактора среды парковки.
4. Способ управления парковкой по любому из пп.1-3, содержащий этап, на котором:
когда объект обнаружен на первом маршруте после начала выполнения первой инструкции управления, определяют, что есть изменение фактора среды парковки.
5. Способ управления парковкой по любому из пп.1-4, содержащий этап, на котором:
когда положение или размер целевого пространства парковки, обнаруженные после начала выполнения первой инструкции управления, изменяется с положения или размера целевого пространства парковки, обнаруженного ранее, определяют, что есть изменение фактора среды парковки.
6. Способ управления парковкой по любому из пп.1-5, содержащий этап, на котором:
когда положение или размер объекта, обнаруженные после начала выполнения первой инструкции управления, изменяется с положения или размера объекта, обнаруженного ранее, определяют, что есть изменение фактора среды парковки.
7. Способ управления парковкой по любому из пп.1-6, содержащий этап, на котором:
когда положение оператора, обнаруженное после начала выполнения первой инструкции управления, изменяется с положения оператора, обнаруженного ранее, определяют, что есть изменение фактора среды парковки.
8. Способ управления парковкой по любому из пп.1-7, содержащий этап, на котором:
когда объект, обнаруженный после начала выполнения первой инструкции управления, не является движущимся объектом, определяют, что есть изменение фактора среды парковки.
9. Способ управления парковкой по любому из пп.1-8, содержащий этап, на котором:
когда объект, обнаруженный после начала выполнения первой инструкции управления, является препятствием, которое препятствует движению транспортного средства, определяют, что есть изменение фактора среды парковки.
10. Способ управления парковкой по любому из пп.1-9, содержащий этап, на котором:
когда есть изменение фактора среды парковки, представляют дисплей для запроса о вводе команды выполнения для второй инструкции управления на операционном терминале, способном к осуществлению связи.
11. Аппаратура управления парковкой, содержащая устройство управления, сконфигурированное для выполнения первой инструкции управления на основе рабочей команды, полученной от оператора, причем первая инструкция управления предназначена для движения транспортного средства по первому маршруту в целевое пространство парковки, причем устройство управления работает чтобы:
когда есть изменение фактора среды парковки транспортного средства, обнаруженного после начала выполнения первой инструкции управления, относительно фактора среды парковки транспортного средства, обнаруженного до начала выполнения первой инструкции управления, приостанавливать или отменять выполнение первой инструкции управления; и
делать запрос оператору о том, необходимо ли выполнять вторую инструкцию управления для движения транспортного средства так, что транспортное средство удаляется от целевого пространства парковки в большей степени, чем в состоянии, когда первая инструкция управления приостановлена или отменена.
| WO 2017068695 A1, 27.04.2017 | |||
| JP 2014054912 A, 27.03.2014 | |||
| УСТРОЙСТВО И СПОСОБ СОДЕЙСТВИЯ ПАРКОВКЕ | 2011 |
|
RU2525597C1 |
| US 2016272244 A1, 22.09.2016. | |||

