Перекрестная ссылка на связанные заявки
[0001] Настоящая заявка основана на заявке №201510695152.2 на выдачу китайского патента, все содержание которой включено в настоящий документ, и по которой испрошен приоритет. Данная заявка была подана 22 октября 2015 года.
Область техники
[0002] Настоящее изобретение относится к области интеллектуальных терминалов и, более конкретно, к способам и устройствам для предупреждения о встречном транспортном средстве за поворотом.
Уровень техники
[0003] Транспортные средства привносят значительное удобство в повседневную жизнь, но также, иногда, и угрозы. Например, существует высокая вероятность аварий, например, дорожно-транспортных происшествий, для встречных транспортных средств на повороте. Из уровня техники известно, что, когда транспортное средство приближается к повороту, обычно используются акустические меры, например, подача звукового сигнала как можно раньше, для предупреждения водителя о встречном транспортном средстве, которое движется в противоположном направлении, чтобы избежать аварии.
Сущность изобретения
[0004] Для того чтобы преодолеть проблемы, существующие в данной области техники, настоящим изобретением заявлен способ и устройство для предупреждения о встречном транспортном средстве за поворотом таким образом, чтобы достичь автоматического предупреждения о встречных транспортных средствах за поворотом и тем самым успешно избежать аварий встречных транспортных средств.
[0005] В соответствии с первым аспектом осуществления данного изобретения, заявлен способ для предупреждения о встречном транспортном средстве за поворотом, выполняемый устройством для предупреждения о встречном транспортном средстве за поворотом, включающий в себя:
получение информации о положении движущихся транспортных средств;
определение целевого транспортного средства, приближающегося к столкновению с приближающимся транспортным средством за поворотом согласно информации о положении движущихся транспортных средств и дорожной информации; и
предупреждение целевого транспортного средства о встречном транспортном средстве за поворотом.
[0006] В одном из вариантов осуществления устройство для предупреждения о приближающемся транспортном средстве за поворотом выполнено на сервере; информация о положении движущихся транспортных средств включает в себя: координаты в разные моменты времени, поступающие от множества транспортных средств и получаемые сервером; предупреждение целевого транспортного средства о приближающемся транспортном средстве за поворотом, включающее в себя: передачу предупреждающего уведомления о возможном столкновении на соответствующее целевое транспортное средство, таким образом, чтобы соответствующее целевое транспортное средство при получении предупреждающего уведомления о столкновении выдавало водителю тревожный сигнал о встречном транспортном средстве за поворотом.
[0007] В одном из вариантов осуществления устройство для предупреждения о приближающемся транспортном средстве за поворотом предусмотрено на навигационном устройстве; при этом информация о положении движущихся транспортных средств включает в себя: координаты первого положения на маршруте в разные моменты времени, передаваемые посредством широковещательного канала другими транспортными средствами и получаемые транспортным средством, на котором установлено навигационное устройство;
определение целевого транспортного средства, приближающегося к столкновению с приближающимся транспортным средством за поворотом согласно информации о положении движущихся транспортных средств и дорожной информации, включая: определение, что транспортное средство, на котором находится навигационное устройство, приближается к столкновению с другим транспортным средством за поворотом по координате первого положения, координате второго положения транспортного средства, на котором установлено навигационное устройство, и дорожной информации; и предупреждение целевого транспортного средства о встречном транспортном средстве включает в себя: выдачу водителю транспортного средства, на котором установлено навигационное устройство, тревожного сигнала о встречном транспортном средстве за поворотом.
[0008] В одном из вариантов осуществления навигационное устройство включает в себя бортовое навигационное устройство транспортного средства или мобильный терминал с функцией навигации.
[0009] В одном из вариантов осуществления способ далее включает в себя: определение, что транспортное средство, на котором установлено навигационное устройство, приближается к повороту по координате второго положения транспортного средства, на котором установлено навигационное устройство, и дорожной информации; и передачу посредством широковещательного канала координаты второго положения на маршруте в разные моменты времени транспортного средства, на котором установлено навигационное устройство, когда расстояние между транспортным средством, на котором установлено навигационное устройство, и поворотом снижается ниже предварительно установленного порога расстояния.
[0010] В соответствии со вторым аспектом осуществления данного изобретения, заявлено устройство для предупреждения о встречном транспортном средстве за поворотом, включающее в себя:
модуль получения информации, сконфигурированный для получения информации о положении движущихся транспортных средств;
модуль определения столкновения, сконфигурированный для определения, что целевое транспортное средство приближается к столкновению со встречным транспортным средством за поворотом согласно информации о положении движущихся транспортных средств и дорожной информации; и
модуль предупреждения о столкновении, сконфигурированный для предупреждения целевого транспортного средства о встречном транспортном средстве за поворотом.
[0011] В одном из вариантов осуществления устройство предупреждения о встречном транспортном средстве предусмотрено на сервере; информация о положении движущихся транспортных средств, получаемая модулем получения информации, включает в себя координаты положения на маршруте в разные моменты времени, передаваемые множеством движущихся транспортных средств и получаемые сервером; и модуль предупреждения о столкновении, сконфигурированный для передачи предупреждающего уведомления о столкновении соответствующему целевому транспортному средству, приближающемуся к столкновению со встречным транспортным средством за поворотом, таким образом, чтобы соответствующее целевое транспортное средство при получении предупреждающего уведомления о столкновении выдавало водителю тревожного сигнала о встречном транспортном средстве за поворотом.
[0012] В одном из вариантов осуществления устройство предупреждения о встречном транспортном средстве предусмотрено на навигационном устройстве; информация о положении движущихся транспортных средств, получаемая модулем получения информации, включает в себя координаты первого положения на маршруте в разные моменты времени, передаваемые посредством широковещательного канала другими транспортными средствами и получаемые транспортным средством, на котором установлено навигационное устройство; модуль определения столкновения, сконфигурированный для определения, что транспортное средство, на котором установлено навигационное устройство, приближается к столкновению с другим транспортным средством за поворотом по координате первого положения, координате второго положения транспортного средства, на котором установлено навигационное устройство, и дорожной информации; и модуль предупреждения о столкновении, сконфигурированный для выдачи водителю транспортного средства, на котором установлено навигационное устройство, тревожного сигнала о встречном транспортном средстве за поворотом.
[0013] В одном из вариантов осуществления навигационное устройство включает в себя бортовое навигационное устройство транспортного средства или мобильный терминал с функцией навигации.
[0014] В одном из вариантов осуществления устройство далее включает в себя: модуль предсказания поворота, сконфигурированный для определения того, что транспортное средство, на котором установлено навигационное устройство, приближается к повороту по координате второго положения транспортного средства, на котором установлено навигационное устройство, и дорожной информации; и модуль передачи, сконфигурированный для передачи посредством широковещательного канала координаты второго положения на маршруте в разные моменты времени транспортного средства, на котором установлено навигационное устройство, когда расстояние между транспортным средством, на котором установлено навигационное устройство, и поворотом становится ниже предварительно установленного порогового расстояния.
[0015] В соответствии с третьим аспектом осуществления данного изобретения, заявлено устройство для предупреждения о встречном транспортном средстве за поворотом, включающее в себя:
процессор; и
запоминающее устройство для хранения команд, выполняемых процессором;
при этом процессор сконфигурирован для: получения информации о положении при передвижении транспортных средств; определения целевого транспортного средства, приближающегося к столкновению со встречным транспортным средством за поворотом, согласно информации о положении движущихся транспортных средств и дорожной информации; и предупреждения целевого транспортного средства о встречном транспортном средстве за поворотом.
[0016] Техническое решение согласно вариантам осуществления данного изобретения может обеспечивать, как минимум частично, следующие преимущества. Определяется, что транспортное средство приближается к столкновению с другим транспортным средством согласно информации о положении при передвижении транспортных средств и дорожной информации таким образом, что транспортное средство может быть вовремя предупреждено о встречном транспортном средстве за поворотом. Соответственно, водитель транспортного средства может быть предупрежден заблаговременно, тем самым эффективно снижая возможность аварии со встречными транспортными средствами.
[0017] Следует понимать, что как вышеизложенное общее описание, так и последующее детальное описание являются всего лишь иллюстративными и поясняющими и не ограничивают объем изобретения, как оно заявлено.
Краткое описание чертежей
[0018] Прилагаемые чертежи, включенные в настоящую заявку и составляющие ее часть, иллюстрируют варианты осуществления в соответствии с изобретением и вместе с описанием служат для разъяснения принципов изобретения.
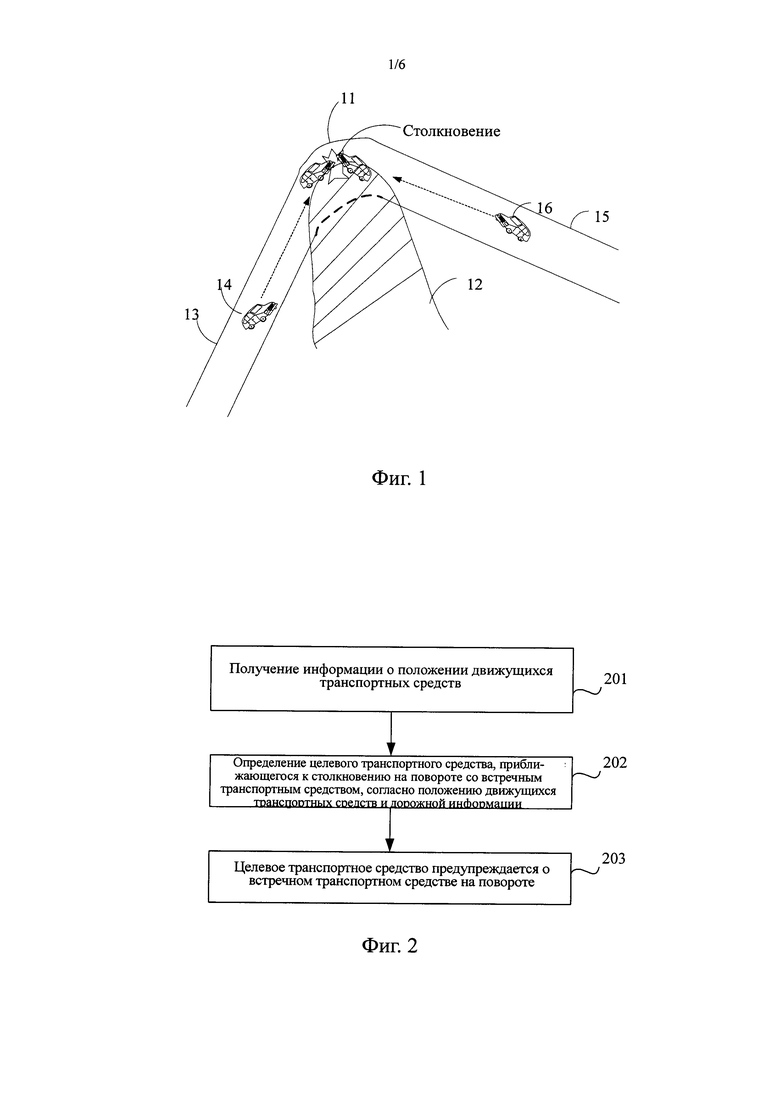
[0019] Фиг. 1 представляет собой схематическое изображение сцены встречных транспортных средств за поворотом в соответствии с примером осуществления.
[0020] Фиг. 2 представляет собой блок-схему способа предупреждения о встречном транспортном средстве за поворотом в соответствии с примером осуществления.
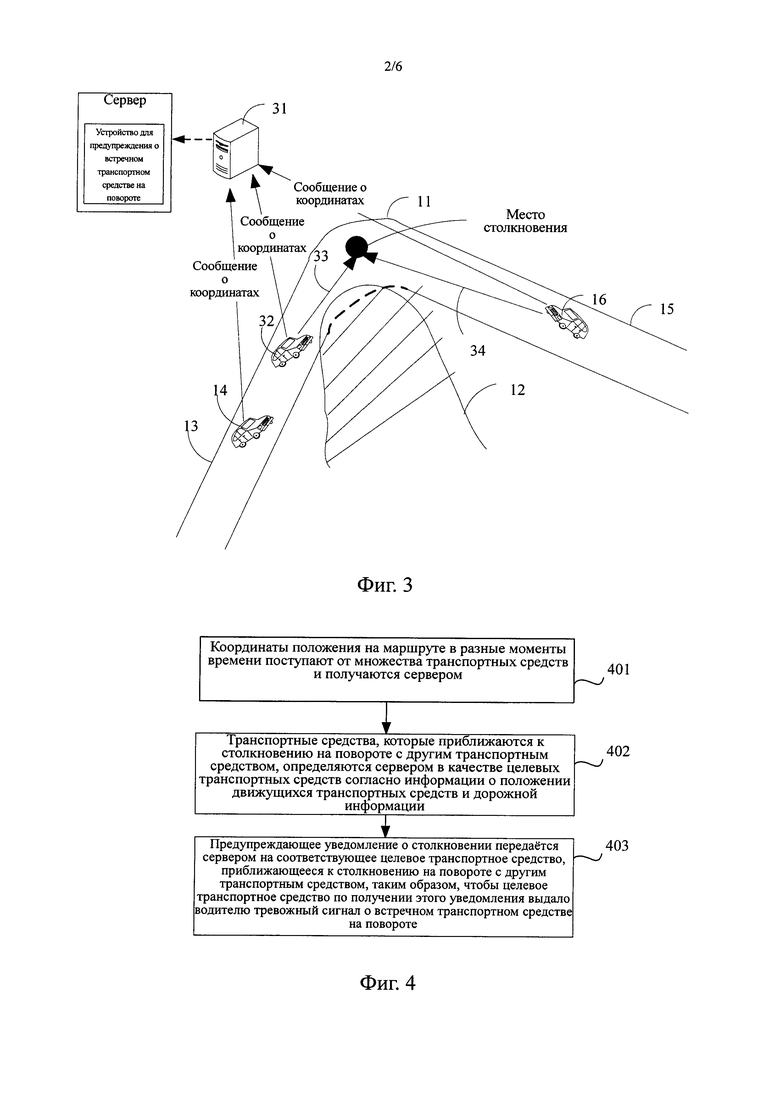
[0021] Фиг. 3 представляет собой схематическое изображение сценария применения транспортных средств в соответствии с примером осуществления.
[0022] Фиг. 4 представляет собой блок-схему способа предупреждения о встречном транспортном средстве за поворотом на основании Фиг. 3.
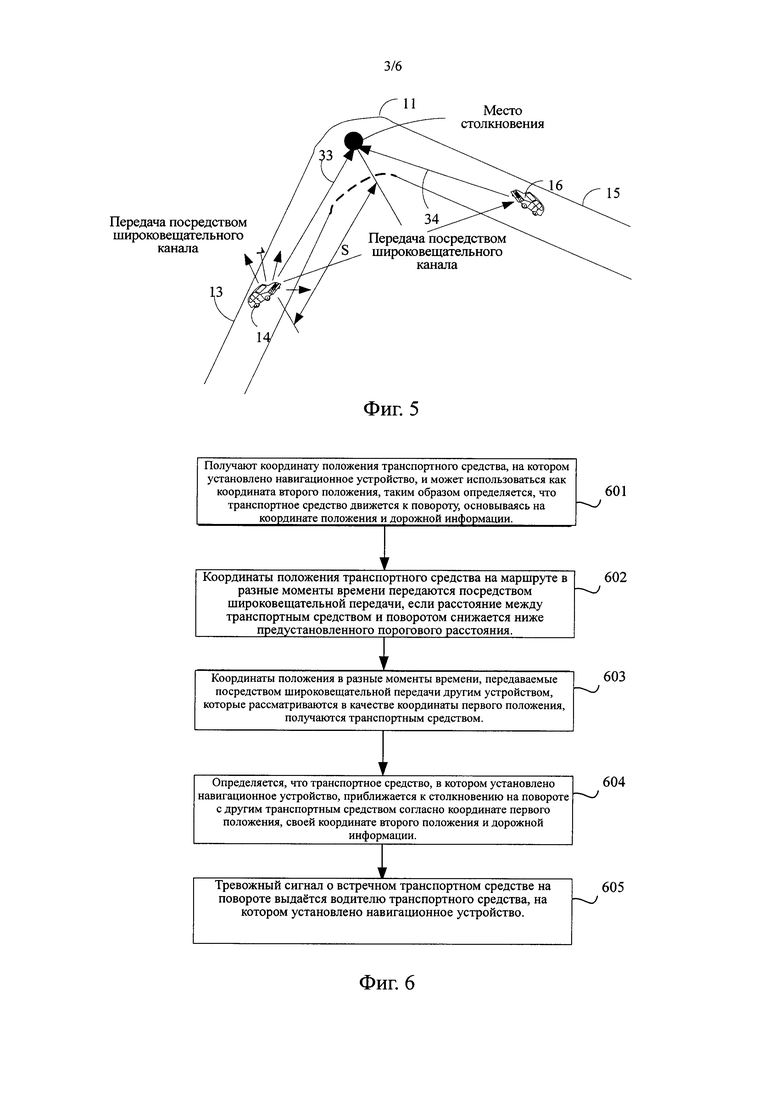
[0023] Фиг. 5 представляет собой схематическое изображение другого сценария применения транспортных средств в соответствии с примером осуществления.
[0024] Фиг. 6 представляет собой блок-схему способа предупреждения о встречном транспортном средстве за поворотом на основании Фиг.5.
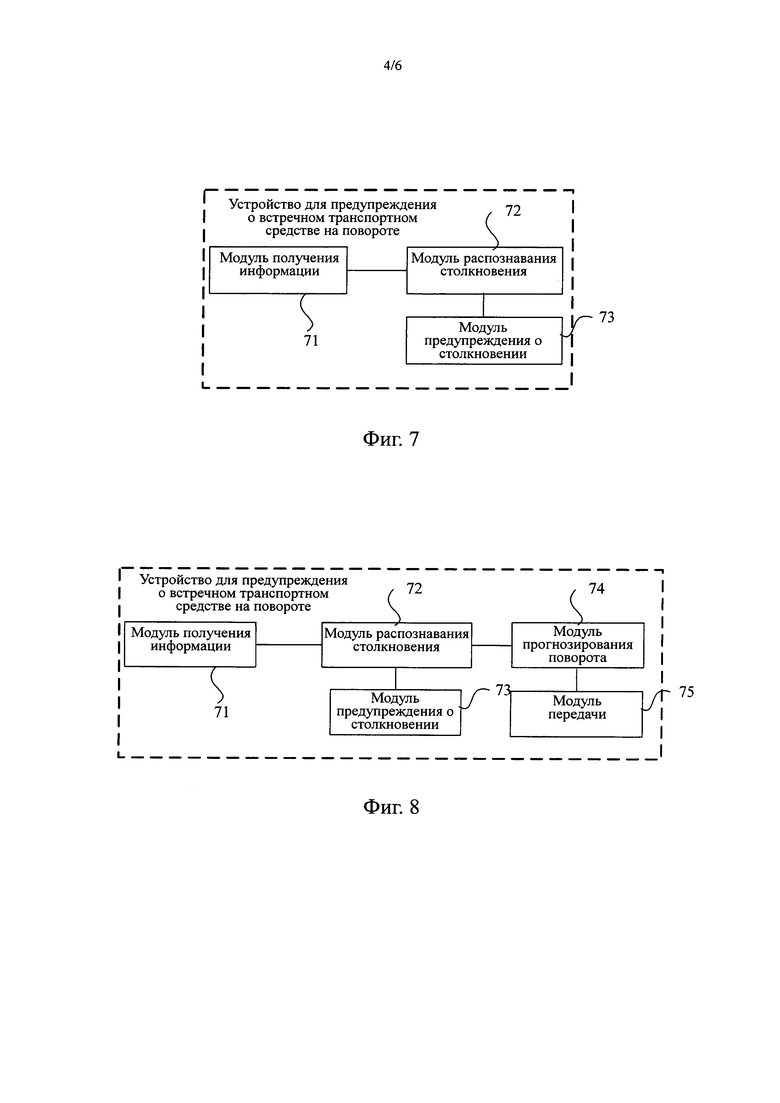
[0025] Фиг. 7 представляет собой блок-схему устройства предупреждения о встречном транспортном средстве за поворотом в соответствии с примером осуществления.
[0026] Фиг. 8 представляет собой блок-схему другого устройства предупреждения о встречном транспортном средстве за поворотом в соответствии с примером осуществления.
[0027] Фиг. 9 представляет собой блок-схему, иллюстрирующую устройство предупреждения о встречном транспортном средстве за поворотом в соответствии с примером осуществления.
[0028] Фиг. 10 представляет собой блок-схему, иллюстрирующую устройство терминала в соответствии с примером осуществления.
Подробное описание
[0029] Далее приведено подробное описание примеров осуществления изобретения, проиллюстрированных прилагаемыми чертежами. Приведенное ниже описание относится к прилагаемым чертежам, на которых одни и те же номера на разных чертежах представляют одни и те же или аналогичные элементы, если на чертежах не указано иное. Варианты осуществления, представленные в последующем описании примеров осуществления, не представляют всех вариантов осуществления, соответствующих данному изобретению. Они являются только примерами устройств и способов, соответствующих аспектам изобретения, как изложено в прилагаемых пунктах формулы изобретения.
[0030] Существует высокая вероятность аварий встречных транспортных средств за поворотом, которые представляют опасность для жизни водителей и пассажиров. Как показано на Фиг. 1, например, поблизости расположения поворота 11, показанного на Фиг. 1, водитель транспортного средства 14, движущегося по полосе 13, и водитель транспортного средства 16, движущегося по полосе 15, не могут видеть друг друга из-за заграждающей обзор скалы 12. Транспортные средства, встречающиеся на поворотах такого типа, могут столкнуться. Как показано на Фиг. 1, столкновение может произойти, когда оба транспортных средства встречаются за поворотом 11.
[0031] Данное изобретение предназначено для обеспечения способа предупреждения движущихся транспортных средств за поворотом таким образом, чтобы можно было заблаговременно автоматически предупреждать о встречном транспортном средстве за поворотом, тем самым эффективно снижая количество происшествий со встречными транспортными средствами. Блок схема способа в качестве примера проиллюстрирована на Фиг. 2 и включает в себя следующие шаги.
[0032] При выполнении шага 201 получают информацию о положении движущихся транспортных средств.
[0033] Например, способ выполняется устройством для предупреждения о встречном транспортном средстве за поворотом. При выполнении этого шага информация о положении при движении транспортных средств может быть получена устройством для предупреждения о встречном транспортном средстве за и может включать в себя: координаты положения GPS транспортного средства в разные моменты времени. Например, движущееся транспортное средство находится в положении, обозначаемом как координата z1 (например, широта и долгота) в момент времени t1, и транспортное средство находится в положении, обозначаемом как координата z2 в момент времени t2.
[0034] В одном из вариантов осуществления информация о положении движущегося транспортного средства может сбыть получена самим транспортным средством и передана на устройство для предупреждения о встречном транспортном средстве за поворотом. Например, движущееся транспортное средство может оснащаться навигационным устройством. Это навигационное устройство может осуществлять определение положения транспортного средства на основании получаемого спутникового сигнала GPS таким образом, чтобы получалась координата положения транспортного средства, на котором установлено навигационное устройство, и передавать ее в устройство для предупреждения о встречном транспортном средстве за поворотом. Устройство для предупреждения о встречном транспортном средстве за поворотом, если оно предусмотрено в навигационном устройстве, может получить информацию о положении движущегося транспортного средства, в котором установлено такое устройство.
[0035] В другом варианте осуществления информация о положении движущегося транспортного средства может далее включать в себя другую информацию, помимо координаты положения транспортного средства.
[0036] При выполнении шага 202 определяется целевое транспортное средство, приближающееся к столкновению со встречным транспортным средством, согласно положению движущихся транспортных средств и дорожной информации.
[0037] Например, устройством для предупреждения о встречном транспортном средстве на повороте могут определяться в качестве «целевых(-ого) транспортных(-ого) средств(-а)» те транспортные средства, которые приближаются к столкновению с другими встречными транспортными средствами за поворотами на основе информации о положении движущихся транспортных средств и дорожной информации. Дорожная информация может включать в себя информацию о том, является ли дорога однополосной или о том, имеется ли поворот. Например, транспортные средства 14 16, показанные на Фиг. 1, могут называться целевыми транспортными средствами.
[0038] При выполнении этого шага имеется несколько способов определения того, что целевое транспортное средство приближается к столкновению со встречным транспортным средством за поворотом. В качестве примера одного из способов: направление движения транспортного средства может сначала определяться устройством для предупреждения о встречном транспортном средстве за поворотом на основе информации о положении движущихся транспортных средств. Например, движущееся транспортное средство находится в положении, указанном в качестве координаты z1 в момент времени t1, и движущееся средство находится в положении, указанном в качестве координаты z2 в момент времени t2; таким образом, направление движения этого транспортного средства может определяться на основе z1 и z2, например, может определяться, что это транспортное средство приближается к повороту. Таким же способом могут определяться несколько транспортных средств, приближающихся к повороту. Кроме того, можно примерно определить место столкновения, показывающее примерное расположение места, где транспортные средства столкнутся друг с другом, в соответствии со скоростью движения соответствующих транспортных средств (например, скорость может рассчитываться по времени и координатам).
[0039] При выполнении шага 203 целевое транспортное средство предупреждается о встречном транспортном средстве за поворотом.
[0040] Например, после того, как транспортное средство было определено в качестве целевого транспортного средства, приближающегося к столкновению с другим транспортным средством за поворотом, оно может предупреждаться согласно данному шагу. Если описанные выше шаги 201 и 202 выполняются каждым отдельным транспортным средством, а устройство для предупреждения о встречном транспортном средстве за поворотом предусмотрено навигационной системой транспортного средства, каждое отдельное транспортное средство может определить, движется ли оно навстречу другому транспортному средству за поворотом. Более того, если транспортное средство движется навстречу другому транспортному средству, оно может выдать тревожный сигнал своему водителю, например, в транспортном средстве может воспроизводиться голосовой тревожный сигнал: «Осторожно, приближается встречный автомобиль». В одном из вариантов осуществления транспортное средство может также передавать предупреждающий сигнал на встречное транспортное средство, определенное при выполнении шага 202. В противном случае такой предупреждающий сигнал может не передаваться; вместо этого встречное транспортное средство может само определить возможность столкновения и выдать тревожный сигнал своему водителю аналогичным способом.
[0041] В одном из вариантов осуществления устройство для предупреждения о встречном транспортном средстве за поворотом может также предусматриваться в сервере, а информация о положении движущегося транспортного средства может поступать на сервер от каждого отдельного транспортного средства. Когда транспортное(-ые) средство(-а), приближающееся(-иеся) к столкновению с другим транспортным средством за поворотом, определено(-ы) сервером при выполнении шага 202, уведомление может по отдельности передаваться на каждое целевое транспортное средство для предупреждения.
[0042] В соответствии со способом для предупреждения о встречном транспортном средстве за поворотом, транспортное(-ые) средство(-а), которое(-ые) приближается(-ются) к столкновению с другим транспортным средством, может(-гут) определяться автоматически на основе информации о положении движущихся транспортных средств и дорожной информации, а затем может(-гут) автоматически предупреждаться о встречном транспортном средстве. В этом случае водитель может быть предупрежден заблаговременно, тем самым избегая происшествий на повороте со встречными транспортными средствами.
[0043] Способ для предупреждения о встречном транспортном средстве за поворотом осуществляется в двух нижеописанных вероятных сценариях.
[0044] Фиг. 3 иллюстрирует один из сценариев применения. Как показано на Фиг. 3, в этом сценарии устройство для предупреждения о встречном транспортном средстве за поворотом предусмотрено в сервере 31. Кроме того, некоторые параметры передаются на сервер 31 каждым транспортным средством, а затем используются сервером для выполнения определения и предупреждения о встречном транспортном средстве за поворотом. Блок-схема алгоритма работы сервера проиллюстрирована на Фиг. 4 и включает в себя следующие шаги.
[0045] При выполнении шага 401 координаты на маршруте в разные моменты времени поступают от множества транспортных средств и получаются сервером.
[0046] Как показано на Фиг. 3, например, транспортные средства 14, 16 и 32 могут сообщить свои координаты положения серверу. Рассмотрим транспортное средство 14 в качестве примера: его координаты GPS можно получать посредством имеющейся у него навигационной системы (например, бортовой навигации транспортного средства или навигации мобильного телефона), а затем можно постоянно передавать вместе с другой информацией, такой как скорость и т.п., серверу через WAN (глобальная сеть) с движущегося транспортного средства 14.
[0047] При выполнении шага 402 те транспортные средства, которые приближаются к столкновению с другим транспортным средством за поворотом, определяются сервером в качестве целевых транспортных средств согласно информации о положении движущихся транспортных средств и дорожной информации.
[0048] Например, полагая, что транспортные средства 32 и 16 приближаются к столкновению друг с другом на повороте 11, сервер может осуществить определение следующим образом. Согласно координатам положения, сообщенных транспортными средствами 32 и 16 в разные моменты времени, сервер может определить направления движения обоих транспортных средств, то есть, направление движения транспортного средства 32, указанное стрелкой 33, и направление движения транспортного средства 16, указанного стрелкой 34, как показано на Фиг. 3. Затем может быть получено расстояние между транспортными средствами согласно с положениями и дорогами (например, полоса 13, полоса 15 и поворот 11), где они находятся, а затем может быть примерно определено место столкновения, как показано на Фиг. 3. В данном примере транспортные средства 32 и 16, обозначены как «целевые транспортные средства», которые приближаются к столкновению на повороте.
[0049] В одном из вариантов осуществления дорожная информация сохраняется на сервере 31 заранее и может включать в себя картографическую информацию, отслеживаемую по движущемуся транспортному средству, включая: длину и ширину дороги, по которой оно движется, другая(-ие) дорога(-и), пересекающая(-ие) эту дорогу, расположение поворотов и окружающий дорогу ландшафт, например, нет ли препятствия, такого как большое дерево или высокая гора, усложняющего для водителя обзор на повороте, а также, нет ли крутого склона на повороте. С учетом дорожной информации, однако, предупреждение о повороте требуется не для всех поворотов. Например, предупреждение не требуется для поворотов, у которых обеспечивается хорошая видимость без препятствий для обзора обоих водителей встречных транспортных средств.
[0050] В одном из вариантов осуществления предупреждение выдается только на поворотах, на которых имеется опасность аварии для встречных транспортных средств, и информация о таких поворотах может заранее сохраняться на сервере. Например, в случае необходимости, в дорожной информации могут быть заранее отмечены такие опасные повороты. Когда информация о положении, сообщаемая движущимся транспортным средством, получена сервером, он может сначала определить, является ли поворот, к которому приближается данное транспортное средство, опасным поворотом. Никакие действие не требуются, если это не опасный поворот; в противном случае, выполняется этот шаг для определения того, имеются ли на этом повороте встречные транспортные средства. В другом варианте осуществления информация о повороте, заранее сохраненная на сервере, может отсутствовать. Вместо нее сервером в процессе работы может определяться, является ли поворот, к которому приближается транспортное средство, опасным поворотом, согласно дорожной информации. Например, когда сервер определяет, что впереди на повороте имеется высокая гора и что согласно направлению движения транспортного средства обзор водителя может быть затруднен этой высокой горой, поворот может быть определен как опасный поворот. Затем сервер может определить, имеются ли встречные транспортные средства за поворотом.
[0051] При выполнении шага 403 предупреждающее уведомление о столкновении передается сервером на соответствующее целевое транспортное средство, приближающееся к столкновению с другим транспортным средством за поворотом так, чтобы целевое транспортное средство по получении этого уведомления выдало водителю тревожный сигнал о встречном транспортном средстве за поворотом.
[0052] Например, после примерной оценки сервером места столкновения транспортных средств 32 и 16 определяется, что они движутся к столкновению на повороте друг с другом. Предупреждающее уведомление о столкновении может быть передано на оба транспортных средства, соответственно, от сервера на навигационную систему в транспортных средствах. Уведомление передается для команды целевому устройству выдать тревожный сигнал своему водителю. Например, по получении уведомления, навигационная система может воспроизвести в транспортном средстве голосовой тревожный сигнал: «Осторожно, приближается встречный автомобиль», чтобы предупредить водителя о необходимости ехать осторожно, тем самым пытаясь избежать аварии.
[0053] В соответствии со способом для предупреждения о встречном транспортном средстве за поворотом в данном варианте осуществления, как определение встречного транспортного средства, так и предупреждение о нем выполняются сервером. В этом случае транспортным средствам нужно лишь сообщать информацию о своем положении, поэтому это удобно для транспортных средств. Кроме того, сервер может точно определить целевые транспортные средства, приближающиеся к столкновению. Предупреждающее уведомление передается только на целевые транспортные средства, а не на все транспортные средства, поэтому этот вариант является направленным и эффективным.
[0054] Фиг. 5 иллюстрирует другой из сценариев применения. В этом сценарии устройство для предупреждения о встречном транспортном средстве за поворотом предусмотрено на навигационном устройстве, которое может быть бортовым навигационным устройством транспортного средства или мобильным терминалом с функцией навигации. Иными словами, способ для предупреждения о встречном транспортном средстве за поворотом, обеспечиваемый изобретением, осуществляется по отдельности на соответствующем транспортном средстве.
[0055] На Фиг. 5 проиллюстрированы транспортное средство 14, движущееся по полосе 13, и транспортное средство 16, движущееся по полосе 15, и предполагается, что эти транспортные средства приближаются к столкновению на повороте друг с другом. Способ для предупреждения о встречном транспортном средстве за поворотом может осуществляться в соответствии с блок-схемой, показанной Фиг. 6, которая применима к любому транспортному средству, например, транспортному средству 14 или транспортному средству 16.
[0056] При выполнении шага 601 получают координату положения транспортного средства, на котором установлено навигационное устройство, и она может использоваться как координата второго положения, и определяют, что транспортное средство движется к повороту, основываясь на координате положения и дорожной информации.
[0057] Например, координата, относящаяся к широте и долготе транспортного средства 14, может быть определена бортовой навигационной системой транспортного средства 14 на основании сигналов GPS, рассматривается в качестве координаты второго положения и может быть получена постоянно для определения координат на маршруте в разные моменты времени так, чтобы можно было определить направление движения транспортного средства. В комбинации с информацией о дороге, по которой движется транспортное средство 14, можно определить, что транспортное средство 14 начнет приближаться к повороту 11, если будет сохранять предыдущее направление движения. Точно также может быть определено направление движения транспортного средства 16 его навигационным устройством. Как показано на Фиг. 5, направление движения транспортного средства 14 обозначено стрелкой 33, а направление движения транспортного средства 16 обозначено стрелкой 34.
[0058] При выполнении шага 602 координаты положения транспортного средства на маршруте в разные моменты времени передаются посредством широковещательного канала, когда расстояние между транспортным средством и поворотом становится ниже предварительно установленного порогового расстояния.
[0059] Например, текущее положение движущегося транспортного средства может определяться навигационной системой транспортного средства в процессе движения, но не обязательно передаваться посредством широковещательного канала все время. На этом шаге координата положения движущегося транспортного средства на маршруте на разных временных интервалах может передаваться посредством широковещательного канала, только если расстояние между транспортным средством и поворотом уменьшается ниже предварительно установленного порога. В качестве примера, проиллюстрированного на Фиг. 5, где предполагается, что транспортное средство 14 двигается вдоль направления, показанного стрелкой 33, и приближается к повороту 11, расстояние S между текущим положением и поворотом 11 уже меньше или равно предварительно установленному порогу, то есть достаточно близкое, поэтому можно начинать передачу посредством широковещательного канала координаты второго положения для транспортного средства 14, например, через передачу данных Wi-Fi или по каналу Bluetooth™, навигационной системой транспортного средства 14.
[0060] При выполнении шага 603 координаты положения на маршруте в разные моменты времени, передаваемые посредством широковещательного канала другим устройством, которые рассматриваются в качестве координат первого положения, получаются транспортным средством.
[0061] Например, координаты первого положения, передаваемые посредством широковещательного канала транспортным средством 14 при выполнении шага 602, могут приниматься навигационной системой транспортного средства 16. Аналогично, шаги 601 и 602 могут выполняться транспортным средством 16, координата первого положения, передаваемая посредством широковещательного канала транспортным средством 16, может таким образом приниматься транспортным средством 14. Иными словами, каждое транспортное средство может получать координату(-ы) первого положения, передаваемую(-ые) другим(-и) транспортным(-и) средством(-ами) и получать для себя координаты второго положения.
[0062] При выполнении шага 604 определяется, что транспортное средство, в котором установлено навигационное устройство, приближается к столкновению с другим транспортным средством за поворотом по координате первого положения, своей координате второго положения и дорожной информации.
[0063] Например, может определяться, приближается ли транспортное средство к столкновению с другим транспортным средством за поворотом, по предыдущей координате первого положения, координате второго положения самого транспортного средства и дорожной информации. Рассмотрим транспортное средство 14 в качестве примера: транспортное средство 14 может определить направление своего движения по своей координате второго положения, также как направление движения транспортного средства 16 на основе полученной координаты первого положения транспортного средства, а затем может определить скорости движения обоих транспортных средств по координатам положения в разные моменты времени.
[0064] В комбинации с дорожной информацией транспортное средство 14 может примерно определить, что оно приближается к встречному транспортному средству 16 за поворотом 11, и определить, что поворот 11 является опасным поворотом, поскольку расположенные поблизости деревья и гора могут ухудшать обзор для управления. Соответственно, может далее выполняться шаг 605.
[0065] При выполнении шага 605 тревожный сигнал о встречном транспортном средстве за поворотом выдается водителю транспортного средства, на котором установлено навигационное устройство.
[0066] Например, голосовой тревожный сигнал может выдаваться водителю бортовым навигационным устройством транспортного средства 14. Кроме того, транспортное средство 14 может также передать предупреждающее уведомление на транспортное средство 16. Или же транспортное средство 14 может не передавать предупреждение на транспортное средство 16, поскольку транспортное средство 16 может выполнить самостоятельно весь процесс, включая шаги, показанные на Фиг. 6, чтобы узнать о встречном транспортном средстве 14 за поворотом таким образом, чтобы водитель транспортного средства 16 мог быть предупрежден заблаговременно.
[0067] В соответствии со способом для предупреждения о встречном транспортном средстве за поворотом, обеспечиваемом в данном варианте осуществления, определение встречного транспортного средства за поворотом и предупреждение о нем осуществляются по отдельности каждым транспортным средством без участия сервера. Такой способ предупреждения может применяться, когда транспортное средство не оснащено функцией WAN, и поэтому он чаще применим.
[0068] Кроме того, когда транспортное средство не обеспечивает ни функции WAN, ни навигации GPS, функция передачи посредством широковещательного канала может инициироваться вручную водителем при приближении к повороту. Например, на подъезде к повороту водитель может определить, что это опасный поворот, на котором с большой вероятностью может произойти авария со встречными транспортными средствами, осматривая окружающий ландшафт. Соответственно, водитель может включить передачу посредством широковещательного канала информации о положении транспортного средства, нажав кнопку вручную.
[0069] Фиг. 7 представляет собой блок-схему, иллюстрирующую устройство для предупреждения о встречном транспортном средстве за поворотом в соответствии с примером осуществления. Устройство может быть сконфигурировано для осуществления способа для предупреждения о встречном транспортном средстве за поворотом, описанном выше, и, как показано на Фиг. 7, включает в себя: модуль 71 получения информации, модуль 72 распознавания столкновения и модуль 73 предупреждения о столкновении.
[0070] Модуль 71 получения информации сконфигурирован для получения информации о положении движущихся транспортных средств.
[0071] Модуль 72 распознавания столкновения сконфигурирован для распознавания целевого транспортного средства, приближающегося к столкновению с другим транспортным средством за поворотом согласно информации о положении движущихся транспортных средств и дорожной информации.
[0072] Модуль 73 предупреждения о столкновении сконфигурирован для выдачи предупреждения целевому транспортному средству о встречном транспортном средстве за поворотом.
[0073] Кроме того, когда устройство для предупреждения о встречном транспортном средстве за поворотом выполнено на сервере,
информация о положении движущихся транспортных средств, полученных модулем 71 получения информации, включает координаты положения на маршруте в разные моменты времени, сообщаемые множеством транспортных средств и получаемые сервером; и
модуль 73 предупреждения о столкновении сконфигурирован для передачи предупреждающего уведомления о столкновении на соответствующее целевое транспортное средство, приближающееся к столкновению со встречным транспортным средством за поворотом, таким образом, что соответствующее целевое транспортное средство по получении предупреждающего уведомления о столкновении выдаст водителю тревожный сигнал о встречном транспортном средстве за поворотом.
[0074] Кроме того, когда устройство для предупреждения о встречном транспортном средстве за поворотом предусмотрено на навигационном устройстве,
информация о положении движущихся транспортных средств, получаемая модулем 71 получения информации, включает в себя координаты первого положения на маршруте в разные моменты времени, полученные транспортным средством, оснащенным навигационным устройством, и передаваемые посредством широковещательного канала другим транспортным средством;
модуль 72 распознавания столкновения сконфигурирован для распознавания, что транспортное средство, оснащенное навигационным устройством, приближается к столкновению с другим транспортным средством за поворотом по координате первого положения, координате второго положения транспортного средства, которое оснащено навигационным устройством, и дорожной информации; и
модуль 73 предупреждения о столкновении сконфигурирован для выдачи водителю транспортного средства, которое оснащено навигационным устройством, тревожного сигнала о встречном транспортном средстве на повороте.
[0075] Например, навигационное устройство включает в себя бортовое навигационное устройство транспортного средства или мобильный терминал с функцией навигации.
[0076] Фиг. 8 представляет собой блок-схему, иллюстрирующую другое устройство предупреждения о встречном транспортном средстве на повороте в соответствии с примером осуществления. Устройство далее включает в себя модуль 74 прогнозирования поворота и модуль 75 передачи.
[0077] Модуль 74 прогнозирования поворота сконфигурирован для определения транспортного средства, оснащенного навигационным устройством, движущегося в направлении поворота, по координате второго положения транспортного средства, оснащенного навигационным устройством, и дорожной информации.
[0078] Модуль 75 передачи сконфигурирован для передачи посредством широковещательного канала координаты второго положения в разные моменты времени транспортного средства, оснащенного навигационным устройством, когда расстояние между транспортным средством, оснащенным навигационным устройством, и поворотом становится ниже предварительно установленного порогового расстояния.
[0079] Данное изобретение далее предусматривает устройство для предупреждения о встречном транспортном средстве на повороте, включающее в себя: процессор; запоминающее устройство для хранения команд, выполняемых процессором; при этом процессор сконфигурирован для получения информации о положении движущихся транспортных средств; определения целевого транспортного средства, приближающегося к столкновению со встречным транспортным средством за поворотом, согласно информации о положении движущихся транспортных средств и дорожной информации; и предупреждения целевого транспортного средства о встречном транспортном средстве за поворотом.
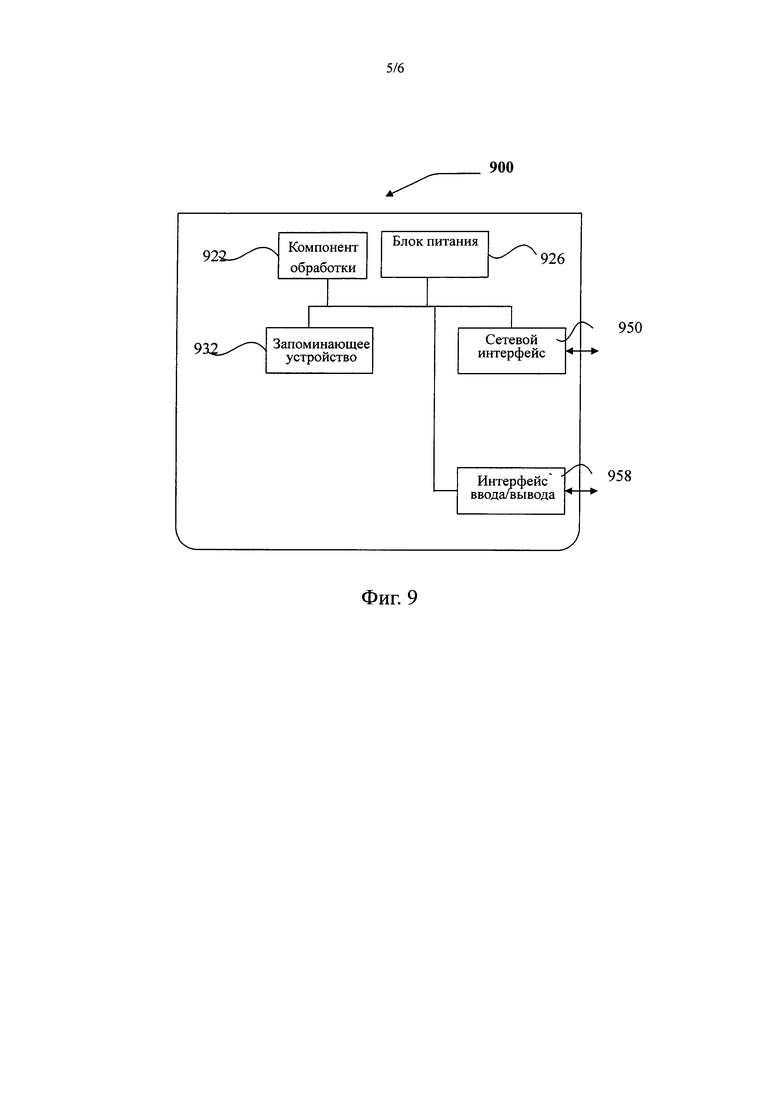
[0080] Фиг. 9 представляет собой блок-схему, иллюстрирующую устройство 900 для предупреждения о встречном транспортном средстве за поворотом согласно примеру осуществления. Например, устройство 900 может представлять собой сервер сервера. Как показано на Фиг. 9, устройство 900 включает в себя компонент 922 обработки, который далее включает в себя один или несколько процессоров, и ресурс памяти, представленный запоминающим устройством 932 и сконфигурированный для хранения команд, например, прикладной программы, выполняемой компонентом 922 обработки. Прикладная программа, сохраняемая на запоминающем устройстве 932, может включать в себя один или несколько модулей, каждый из которых соответствует набору команд. Кроме того, компонент 922 обработки сконфигурирован для выполнения команд таким образом, чтобы осуществлялся вышеописанный способ.
[0081] Устройство 900 далее включает в себя: блок питания, сконфигурированный для осуществления управления электропитанием устройства 900, проводной или беспроводной сетевой интерфейс 950, сконфигурированный для подключения устройства 900 к сети, и интерфейс 958 ввода/вывода (I/O). Устройство 900 может работать на базе операционной системы, которая хранится на запоминающем устройстве 932, такой как Windows Server™, Mac OS X™, Unix™, Linux™, FreeBSD™ и т.п.
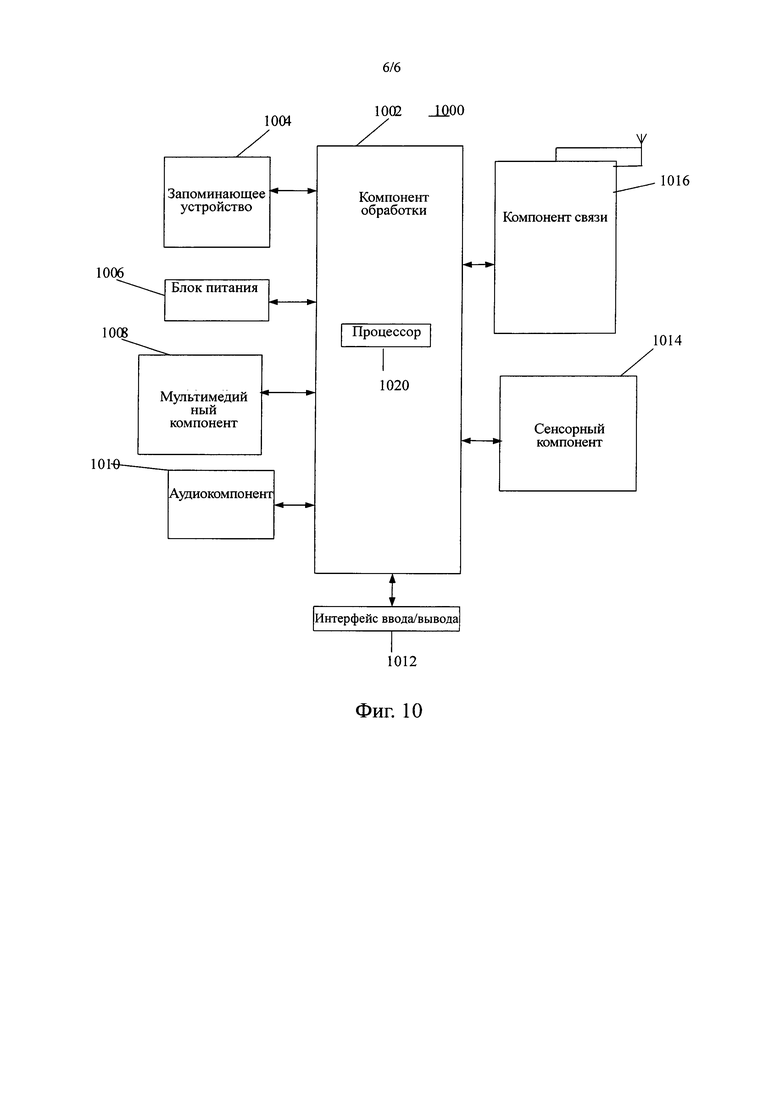
[0082] Фиг. 10 представляет собой блок-схему, иллюстрирующую терминал 1000 в соответствии с примером осуществления. Например, терминал 1000 может представлять собой мобильный телефон, компьютер, абонентское устройство цифрового вещания, устройство передачи сообщений, игровую консоль, планшет, медицинское устройство, тренажерное оборудование, электронного секретаря и аналогичное оборудование.
[0083] Как показано на Фиг. 10, устройство 1000 может включать один или несколько следующих компонентов: компонент 1002 обработки, запоминающее устройство 1004, блок 1006 питания, мультимедийный компонент 1008, аудиокомпонент 1010, интерфейс 1012 ввода/вывода (I/O), сенсорный компонент 1014 и компонент 1016 связи.
[0084] Компонент 1002 обработки обычно управляет общими операциями устройства 1000, такими как операции, связанные с дисплеем, телефонные звонки, передача данных, операции съемки и операции записи. Компонент 1002 обработки может включать в себя один или несколько процессоров 1020 для исполнения команд на выполнение всех шагов описанных выше способов или их части. Более того, компонент 1002 обработки может включать в себя один или более модулей, облегчающих взаимодействие между компонентом 1002 обработки и другими компонентами. Компонент 1002 обработки может, например, включать в себя мультимедийный модуль для облегчения взаимодействия между мультимедийным компонентом 1008 и компонентом 1002 обработки.
[0085] Запоминающее устройство 1004 сконфигурировано для хранения различных типов данных для поддержания функционирования устройства 1000. Примеры таких данных включают в себя инструкции по любым приложениям или способам, задействованным в устройстве 1000, контактные данные, данные из телефонного справочника, сообщения, рисунки, видео и т.д. Запоминающее устройство 1004 может быть реализовано с использованием энергозависимых или энергонезависимых запоминающих устройств или их комбинации, таких как статическое оперативное запоминающее устройство (СОЗУ), электрически программируемое постоянное запоминающее устройство (ЭСППЗУ), стираемое программируемое постоянное запоминающее устройство (СППЗУ), программируемое постоянное запоминающее устройство (ППЗУ), постоянное запоминающее устройство (ПЗУ), магнитное запоминающее устройство, флэш-карта, магнитный или оптический диск.
[0086] Блок 1006 питания обеспечивает электрическое питание различных компонентов устройства 1000. Блок 1006 питания может включать в себя систему управления электрическим питанием, один или несколько источников питания и любые другие компоненты, связанные с выработкой и распределением электроэнергии, а также управлением электрическим питанием в устройстве 1000.
[0087] Мультимедийный компонент 1008 включает в себя экран, обеспечивающий выходной интерфейс между устройством 1000 и пользователем. В некоторых вариантах осуществления изобретения экран может включать в себя жидкокристаллический дисплей (LCD) и сенсорную панель (TP). Если экран включает в себя сенсорную панель, он может быть реализован как сенсорный экран для принятия входных сигналов от пользователя. Сенсорная панель включает в себя один или более тактильных датчиков для восприятия касаний, скольжения и жестов на сенсорной панели. Тактильные датчики могут воспринимать не только границу касания или скольжения, но также воспринимать период времени и нажатие, связанный с действием касания или скольжения. В некоторых вариантах осуществления мультимедийный компонент 1008 включает в себя переднюю камеру и/или заднюю камеру. Передняя и задняя камеры могут принимать внешнюю мультимедийную информацию, когда устройство 1000 находится в рабочем режиме, таком, как режим фотографии или видеосъемки. Каждая из камер - передняя и задняя - может представлять собой фиксированную систему оптических линз или иметь функцию фокусировки и оптического масштабирования.
[0088] Аудиокомпонент 1010 способен выводить и/или вводить аудиосигналы. Аудиокомпонент 1010 может, например, включать в себя микрофон («МIС»), сконфигурированный для приема внешнего аудиосигнала, когда устройство 1000 находится в рабочем режиме, например, в режиме вызова, режиме записи и режиме распознавания голоса. Принятый аудиосигнал может быть далее сохранен в запоминающем устройстве 1004 или передан посредством компонента 1016 связи. В некоторых примерах осуществления, аудиокомпонент 1010 дополнительно включает в себя динамик для вывода аудиосигналов.
[0089] Интерфейс 1012 ввода/вывода обеспечивает интерфейсную связь между компонентом обработки информации 1002 и периферийными интерфейсными модулями, такими, как клавиатура, мышь, кнопки и т.д. Кнопки могут включать в себя кнопку возврата в исходное положение, кнопку регулирования громкости, кнопку запуска и кнопку блокировки, но не ограничиваются ими.
[0090] Сенсорный компонент 1014 включает в себя один или несколько датчиков для обеспечения оценки состояния различных аспектов устройства 1000. Сенсорный компонент 1014 может, например, обнаруживать состояние открытия/закрытия устройства 1000, взаимное расположение компонентов, например, дисплея и клавиатуры устройства 1000, изменение положения устройства 1000 или компонента устройства 1000, наличие или отсутствие контакта пользователя с устройством 1000, ориентацию или ускорение/замедление перемещения устройства 1000 и изменение температуры устройства 1000. Сенсорный компонент 1014 может включать в себя датчик присутствия, сконфигурированный для обнаружения присутствия находящихся вблизи объектов без какого-либо физического контакта. Сенсорный компонент 1014 может также включать в себя оптический датчик, такой как датчик изображения КМОП или ПЗС, для использования с целью получения изображений. В некоторых примерах осуществления сенсорный компонент 1014 может также включать в себя акселерометр, гиродатчик, магнитный датчик, датчик давления или датчик температуры.
[0091] Компонент 1016 связи сконфигурирован для облегчения связи - проводной или беспроводной - между устройством 1000 и другими устройствами. Устройство 1000 может иметь доступ к беспроводной сети, основанной на стандарте связи, такой как Wi-Fi, 2G или 3G, или на их сочетании. В одном из примеров осуществления изобретения компонент 1016 связи принимает транслируемый сигнал оповещения или информацию, связанную с оповещением, от внешней системы управления оповещением посредством широковещательного канала. В одном из примеров осуществления изобретения компонент 1016 связи далее включает в себя модуль беспроводной связи ближнего радиуса действия (NFC) для облегчения связи малого радиуса действия. Модуль NFC может быть выполнен, например, на основе технологии радиочастотной идентификации (РЧИД), технологии Ассоциации передачи данных в инфракрасном диапазоне (АПДИК), сверхширокополосной (UWB) технологии, технологии Bluetooth (технология ближней беспроводной связи для устройств разных типов) и других технологий.
[0092] В примерах осуществления устройство 1000 для реализации описанных выше способов может быть выполнено на одной или нескольких специализированных заказных интегральных схемах (ASIC), цифровых сигнальных процессорах (ЦСП), устройствах цифровой обработки сигналов (УЦОС), программируемых логических устройствах (ПЛУ), программируемых пользователем вентильных матрицах (ППВМ), контроллерах, микроконтроллерах, микропроцессорах или других электронных компонентах.
[0093] В примерах осуществления предусмотрен также энергонезависимый машиночитаемый носитель информации, включающий в себя команды, такие как записанные в запоминающем устройстве 1004, выполняемые процессором 1020 в устройстве 1000, для реализации описанных выше способов. Энергонезависимым машиночитаемым носителем информации может быть, например, ПЗУ, ОЗУ, компакт-диск, магнитная лента, дискета, оптическое устройство хранения данных и подобные им.
[0094] Другие варианты осуществления данного изобретения будут очевидны для специалистов в данной области техники из рассмотрения описания и работы изобретения, описанных в настоящем документе. Предполагается, что данная заявка охватывает любые изменения, варианты использования или адаптации изобретения с соблюдением его общих принципов, включая такие отклонения от данного описания, которые возникают в рамках известной или традиционной практики в данной области. Предполагается, что описание и примеры считаются только примерами, при этом истинный объем изобретения указан в нижеследующей формуле изобретения.
[0095] Предполагается, что данное изобретение не ограничивается точной конструкцией, которая описана выше и проиллюстрирована на включенных чертежах, и что различные модификации и изменения могут быть сделаны, оставаясь в пределах его объема. Предполагается, что объем изобретения ограничивается только прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНЫХ СРЕДСТВ НА УЧАСТКАХ ДОРОГ ВНЕ НАСЕЛЕННЫХ ПУНКТОВ | 2021 |
|
RU2770723C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ УЧАСТНИКОВ ДОРОЖНОГО ДВИЖЕНИЯ | 2015 |
|
RU2598362C1 |
| Способ предотвращения столкновения транспортного средства с другим участником движения | 2020 |
|
RU2750467C1 |
| Комплекс оповещения участников дорожного движения для предотвращения их столкновений | 2024 |
|
RU2836064C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2017 |
|
RU2676854C2 |
| СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ | 2022 |
|
RU2793009C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ПРЕДОТВРАЩЕНИЯ ПРОИСШЕСТВИЙ | 2015 |
|
RU2711835C2 |
| Способ и устройство для обработки информации о дорожном движении | 2015 |
|
RU2634365C2 |
| БЕСПИЛОТНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ЕГО ДВИЖЕНИЕМ | 2022 |
|
RU2809334C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2659670C1 |
Настоящее изобретение относится к способу и устройству для предупреждения о встречном транспортном средстве за поворотом. Устройство для предупреждения о встречном транспортном средстве за поворотом выполнено на сервере. Устройство получает информацию о положении движущихся транспортных средств. Целевое транспортное средство, приближающееся к столкновению со встречным транспортным средством за поворотом, определяется согласно информации о положении движущихся транспортных средств и дорожной информации. Предупреждение целевого транспортного средства о встречном транспортном средстве за поворотом включает в себя передачу предупреждающего уведомления о столкновении соответствующему целевому транспортному средству, приближающемуся к столкновению со встречным транспортным средством за поворотом. Уведомление происходит таким образом, чтобы соответствующее целевое транспортное средство по получении уведомления о столкновении выдавало водителю тревожный сигнал о встречном транспортном средстве за поворотом. Техническим результатом является снижение происшествий, связанных со встречными транспортными средствами. 2 н.п. ф-лы, 9 ил.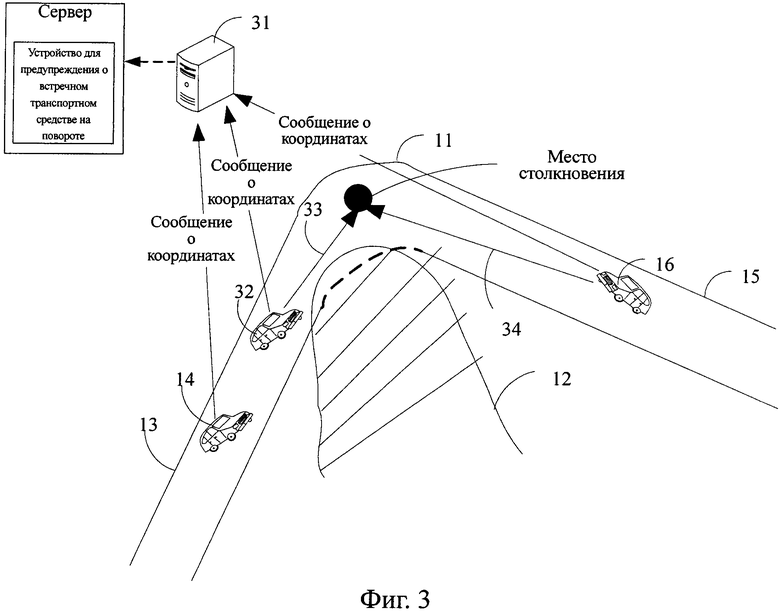
1. Способ для предупреждения о встречном транспортном средстве за поворотом, выполняемый устройством для предупреждения о встречном транспортном средстве за поворотом, включающий в себя:
получение информации о положении движущихся транспортных средств;
определение целевого транспортного средства, приближающегося к столкновению со встречным транспортным средством за поворотом, согласно информации о положении движущихся транспортных средств и дорожной информации; и
предупреждение целевого транспортного средства о встречном транспортном средстве за поворотом;
при этом устройство для предупреждения о встречном транспортном средстве за поворотом выполнено на сервере; при этом информация о положении движущихся транспортных средств включает в себя: координаты положения на маршруте в разные моменты времени, сообщаемые множеством транспортных средств и получаемые сервером;
предупреждение целевого транспортного средства о встречном транспортном средстве за поворотом включает в себя: передачу предупреждающего уведомления о столкновении соответствующему целевому транспортному средству, приближающемуся к столкновению со встречным транспортным средством за поворотом, таким образом, чтобы соответствующее целевое транспортное средство по получении предупреждающего уведомления о столкновении выдавало водителю тревожный сигнал о встречном транспортном средстве за поворотом.
2. Устройство для предупреждения о встречном транспортном средстве за поворотом, включающее в себя:
модуль получения информации, сконфигурированный для получения информации о положении движущихся транспортных средств;
модуль распознавания столкновения, сконфигурированный для распознавания целевого транспортного средства, приближающегося к столкновению со встречным транспортным средством за поворотом, согласно информации о положении движущихся транспортных средств и дорожной информации; и
модуль предупреждения о столкновении, сконфигурированный для предупреждения целевого транспортного средства о встречном транспортном средстве за поворотом;
при этом устройство для предупреждения о встречном транспортном средстве на повороте выполнено на сервере;
информация о положении движущихся транспортных средств, получаемая модулем получения информации, включает в себя координаты положения в разные моменты времени, сообщаемые множеством транспортных средств и получаемых сервером; и
модуль предупреждения о столкновении, сконфигурированный для передачи предупреждающего уведомления о столкновении на соответствующее целевое транспортное средство, приближающееся к столкновению со встречным транспортным средством за поворотом, таким образом, чтобы соответствующее целевое транспортное средство по получении предупреждающего уведомления о столкновении выдало водителю тревожный сигнал о встречном транспортном средстве за поворотом.
| JP 2013077070 A, 25.04.2013 | |||
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2543123C2 |
| WO 2013187828 A1, 19.12.2013 | |||
| US 20140350785 A1, 27.11.2014. | |||

