Область техники, к которой относится изобретение
Изобретение относится к системе управления приспособлениями, в частности к системе управления для использования со сканером пациента.
Предшествующий уровень техники
Обследование пациента с использованием сканеров, таких как МР-, КТ- и ультразвуковой сканеры, включает в себя различные операции. В процессе обследования различные приспособления, такие как компьютерные экраны, могут использоваться различным образом в зависимости от продвижения обследования. Таким образом, медицинскому персоналу в процессе обследования может потребоваться отрегулировать приспособления, например расположение компьютерного экрана. Регулировка приспособлений может требовать много времени и создавать неудобства при обследовании.
Следовательно, проблема заключается в том, что медицинский персонал не может полностью сосредоточиться на самом обследовании, а также может нуждаться в регулировке и адаптации различных приспособлений, используемых в помещении, где находится сканер.
В документе US 2008/0204017 описана МРТ-установка, содержащая платформу, кушетку и осветительный блок, в совокупности множество осветительных блоков. Кушетка имеет съемную верхнюю рабочую поверхность для внутреннего пространства и наружного пространства относительно апертуры. Группа осветительных блоков расположена, по меньшей мере, внутри апертуры или снаружи, откуда внутреннее пространство апертуры может освещаться, при этом осветительные блоки могут выполнять освещение так, что количество излучаемого света постепенно возрастает со стороны расположения кушетки к обратной стороне, противоположной стороне расположения кушетки в апертуре. Контроллер освещения управляет выходной мощностью источника питания для регулировки количества излучаемого света соответствующего излучаемого блока.
В документе US 6264329 описан опорный стол для офтальмологических инструментов, обладающий возможностью регулировки положения, для использования совместно с креслом для обследования пациента и системой освещения, позволяющей пользователю запрограммировать требуемое освещение помещения независимо для каждого из нескольких устройств ввода, таких как переключатели инструментов, смотровые осветители и другие электрические устройства, используемые в ходе офтальмологического обследования. Опорный стол для офтальмологических инструментов включает в себя базовый блок, а также крышку стола, установленную на базовом блоке с помощью опорной конструкции с ИК-управлением для обеспечения четырех степеней свободы с целью регулировки положения крышки стола относительно как пациента, сидящего в кресле, так и осматривающего пациента врача на противоположной стороне стола. Система управления освещением позволяет настроить интенсивность одного или двух контуров комнатных осветителей, причем эта регулировка может автоматически возобновляться для установки запрограммированного комнатного освещения при активации ввода.
В то время как в документе US 6264329 раскрыта система, способная автоматизировать регулировку, например, освещения, по-прежнему остается потребность в усовершенствованиях, касающихся обследования с использованием сканеров, что стало задачей настоящего изобретения.
Сущность изобретения
Желательно достичь усовершенствования обследования пациента, проводимого с использованием сканеров. Желательно также обеспечить автоматизацию действий по регулировке приспособлений, необходимых при проведении обследования. В общем, изобретение предпочтительно направлено на решение одной или нескольких из упомянутых проблем поодиночке или в любом сочетании. В частности, возможной задачей настоящего изобретения является создание системы, решающей вышеуказанные проблемы или иные проблемы предшествующего уровня техники.
Для решения этих проблем в первом аспекте изобретения представлена система управления рабочей окружающей средой для использования с кушеткой сканера пациента, при этом кушетка способна перемещаться относительно сканера, сама же система содержит:
- датчик для детектирования положения кушетки и генерирования сигнала датчика, указывающего положение кушетки,
- контроллер для управления состоянием приспособления в зависимости от сигнала датчика путем генерирования управляющего сигнала исходя из сигнала датчика для вызова изменения состояния приспособления.
Используя положение кушетки для управления приспособлениями, например осветителями или компьютерными экранами, состояние приспособлений может быть оптимально адаптировано для различных обследований пациента, поскольку различные операции могут быть связаны с конкретным положением кушетки относительно сканера.
Приспособление или одно из приспособлений представляет собой исполнительный механизм позиционирования для регулировки положения компьютерного экрана, осветитель или компьютер, используемый для прогона компьютерной программы, при этом состояние изменения компьютерной программы может вызываться управляющим сигналом.
Контроллер может быть выполнен с возможностью генерирования различных управляющих сигналов исходя из сигнала датчика для управления различными приспособлениями. Таким образом, первый и второй управляющие сигналы могут генерироваться исходя из единственного сигнала датчика для управления возможно различными первым и вторым приспособлениями, такими как осветитель и исполнительный механизм позиционирования монитора. Первый и второй управляющие сигналы могут поступать из контроллера через один выход путем временного мультиплексирования первого и второго управляющих сигналов, либо первый и второй управляющие сигналы могут поступать соответственно через первый и второй выходы контроллера.
В одном варианте осуществления первая величина управляющего сигнала предназначена для вызова первого изменения состояния приспособления, а вторая величина управляющего сигнала предназначена для вызова второго изменения состояния приспособления. Первое изменение состояния отличается от второго изменения состояния. Соответственно множество различных изменений состояния приспособления может регулироваться в зависимости от положения кушетки.
В одном варианте осуществления контроллер выполнен с возможностью обеспечения задания изменения состояния приспособления. Соответственно пользователь может задать требуемое изменение состояния приспособления. Например, предпочтительное с точки зрения пользователя положение компьютерного монитора для заданной процедуры обследования может быть предварительно задано, например, путем программирования контроллера. Контроллер может осуществлять процесс регистрации, при котором контроллер регистрирует предпочтительные изменения состояния.
В одном варианте осуществления система управления содержит устройство ввода, подсоединяемое к контроллеру, при этом устройство ввода обеспечивает возможность изменения состояния приспособления в режиме реального времени. Используя устройство ввода, такое как клавишная панель компьютера, медицинский персонал может отменить любое состояние, определенное в текущий момент времени, исходя из положения кушетки.
В одном варианте осуществления управляющий сигнал подается непосредственно на приспособление через выход контроллера. Таким образом, управляющий сигнал может иметь форму, непосредственно применимую к устройству. Например, управляющий сигнал может представлять собой высоковольтный сигнал.
В одном варианте осуществления система управления рабочей окружающей средой дополнительно содержит привод приспособления, выполненный с возможностью генерирования задающего сигнала для приспособления в зависимости от управляющего сигнала. Привод может преобразовывать управляющий сигнал от контроллера в сигнал, пригодный для подачи энергии на приспособление, например исполнительный механизм позиционирования.
Второй аспект изобретения связан с системным комплексом кушетки для использования со сканером пациента, при этом системный комплекс кушетки содержит:
- систему управления рабочей окружающей средой согласно первому аспекту, а также
- кушетку, выполненную так, что положение кушетки может детектироваться датчиком.
Третий аспект изобретения связан со способом управления одним или более приспособлениями в зависимости от положения кушетки относительно сканера пациента, при этом способ содержит:
- генерирование сигнала датчика, указывающего положение кушетки, используя датчик, расположение которого связано с кушеткой,
- генерирование одного или более управляющих сигналов исходя из сигнала датчика, а также
- использование одного или более управляющих сигналов для изменения состояния одного или более приспособлений.
В одном варианте осуществления один или более управляющих сигналов используются для управления одним или более из следующих элементов: направление освещения осветителя, ориентация и/или местоположение компьютерного дисплея.
Подводя итоги, изобретение относится к системе для автоматизации регулировки или адаптации устройств, таких как осветители, компьютерных программ и расположения устройств, используемых в процессе обследования пациента. Обследование пациента выполняется с использованием сканирующей системы, в которой пациент лежит на кушетке, способной перемещаться в зону сканирования сканера, где может выполняться сканирование, а также из зоны сканирования. Автоматическое управление достигается путем детектирования положения кушетки и использования распознанного положения для регулировки или адаптации состояния, т.е. функционирования или работы одного или более устройств.
В целом различные аспекты изобретения могут быть скомбинированы или соединены любым возможным способом в объеме изобретения. Эти и другие аспекты, признаки и/или преимущества изобретения станут очевидны из последующего описания вариантов осуществления.
Краткое описание чертежей
Варианты осуществления изобретения будут описаны лишь в качестве примера со ссылкой на чертежи, где
на фиг.1 показаны компоненты системы управления рабочей окружающей средой,
на фиг.2 показаны этапы способа согласно одному варианту осуществления изобретения.
Описание вариантов осуществления
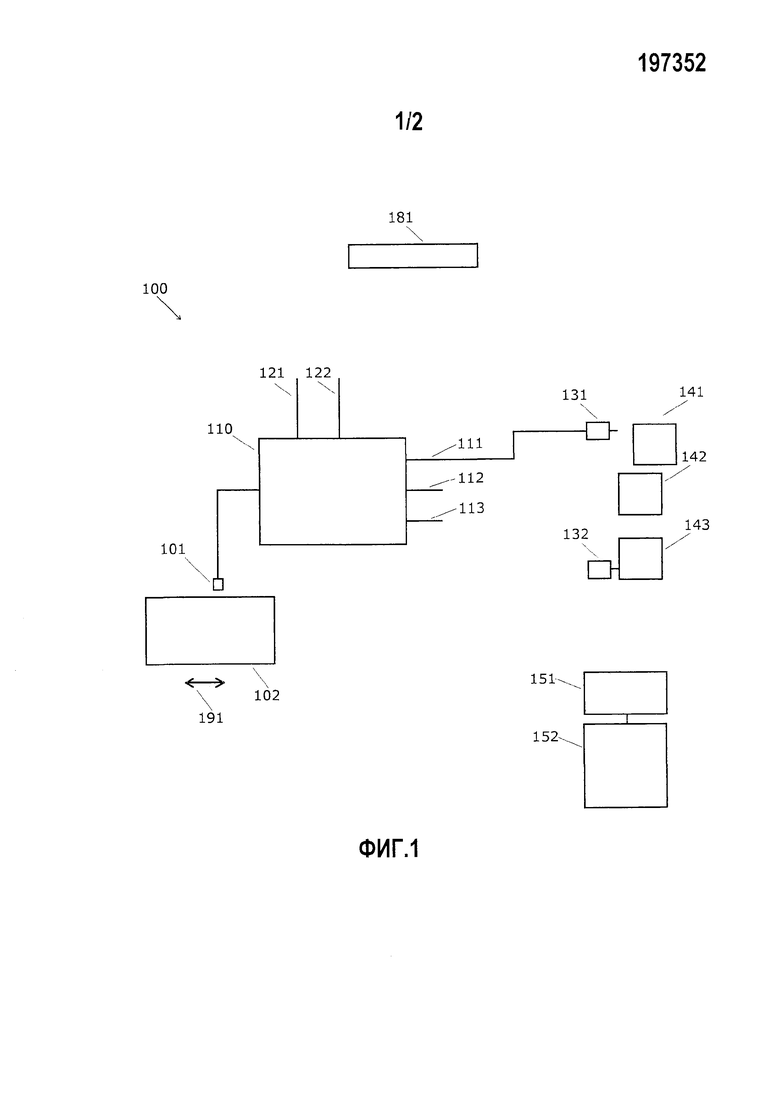
На фиг.1 показана система 100 управления рабочей окружающей средой для использования с кушеткой 102 сканера пациента, такого как МР-сканер или другие существующие или будущие сканеры, где пациент расположен на кушетке, способной перемещаться относительно сканера, например вдоль продольного направления 191 пациента, лежащего на кушетке 102.
Система содержит датчик 101 кушетки, способный определять положение кушетки или перемещение кушетки. Например, датчик кушетки может представлять собой оптический датчик, способный детектировать одно или более положений кушетки. Например, кушетка может быть оборудована отражающими элементами, распознаваемыми оптическим датчиком кушетки. Механические контактные датчики и датчики других типов, например кодирующее устройство, соединенное с двигателем, применяемым для управления кушеткой, также могут использоваться.
Выход датчика 101 кушетки соединен с входом контроллера 110. Контроллер 110 имеет один или несколько выходов 111-113, предусмотренных для подачи управляющего сигнала на одно или несколько приспособлений 141-143, содержащих исполнительные механизмы для регулировки положения, например компьютерных экранов или осветителей.
Управляющий сигнал может подаваться непосредственно на приспособление через выходы 111-113 контроллера или посредством привода 131-132 приспособления, выполненного с возможностью генерирования задающего сигнала для приспособления в зависимости от управляющего сигнала.
Привод приспособления представляет собой привод исполнительного механизма, способный преобразовывать низковольтный управляющий сигнал в сигнал мощности исполнительного механизма. С целью управления исполнительным механизмом управляющий сигнал может представлять собой аналоговый или цифровой сигнал задания референсного положения, подаваемый на привод 132 исполнительного механизма, подающий сигнал мощности исполнительного механизма на исполнительный механизм позиционирования, пока требуемое референсное положение не будет достигнуто. На практике исполнительный механизм может содержать детектор положения, такой как кодирующее устройство, передающее позиционный сигнал обратно на привод в качестве сигнала обратной связи для управления исполнительным механизмом позиционирования по контуру обратной связи.
Привод 131 может представлять собой отдельный компонент, присоединяемый к контроллеру 110 и одному из приспособлений, либо он может быть встроен в контроллер 110 или приспособление 141. Соответственно управляющий сигнал, генерируемый контроллером, может представляться собой управляющий сигнал, приведенный в определенное состояние (например, преобразованный в высоковольтный сигнал) приводом 131, содержащимся в контроллере 110, либо управляющий сигнал может представлять собой низковольтный сигнал, который требуется привести в определенное состояние отдельным приводом или приводом, содержащимся в приспособлении, таком как исполнительный механизм позиционирования, имеющий встроенный привод. Управляющий сигнал, сгенерированный контроллером, может не требовать изменения приводом, например контроллер может генерировать управляющий сигнал, который непосредственно может быть использован компьютером.
Таким образом, контроллер 110 может генерировать множество управляющих сигналов различных форматов, описанных выше, при этом управляющие сигналы могут передаваться через один или более выходов 111-113. Следовательно, один выход может быть способен передавать различные управляющие сигналы различных форматов, например, с использованием передачи со сдвигом по времени, т.е. мультиплексирования с разделением по времени.
В дополнение к управлению приспособлениями 141-143, такими как исполнительные механизмы позиционирования, управляющий сигнал может генерироваться контроллером 110 исходя из положения кушетки для управления графическим интерфейсом пользователя, отображаемым компьютерным монитором 152, например, для изменения состояний или режимов визуализации графического интерфейса пользователя в отношении компьютерных программ, исполняемых компьютером и отображаемых на компьютерном дисплее. С этой целью управляющий сигнал, указывающий положение кушетки 102, может подаваться на компьютер 151, исполняющий компьютерную программу с соответствующим графическим интерфейсом пользователя, отображаемым на мониторе 152.
Первое положение кушетки может приводить к генерированию первой величины управляющего сигнала, а второе положение кушетки может приводить к генерированию второй величины управляющего сигнала.
В общем, приспособления имеют различные состояния, например, в виде различных положений и/или направлений осветителей и компьютерных экранов, а также различных режимов визуализации графического интерфейса пользователя, т.е. различных видов графического интерфейса пользователя компьютерной программы.
Соответственно контроллер выполнен с возможностью управления состоянием приспособления в зависимости от сигнала датчика путем генерирования управляющего сигнала исходя из сигнала датчика для вызова изменения состояния приспособления. Изменение состояния приспособления может представлять собой изменение положения или ориентации исполнительного механизма позиционирования, либо изменение внешнего вида или режима визуализации графического интерфейса пользователя.
Контроллер 110 может содержать компьютер или схожий процессор для обработки данных, предназначенный для генерирования управляющего сигнала в зависимости от выходного сигнала с детектора кушетки. Например, кушетка может иметь два положения, а значит, детектор кушетки способен генерировать отличительные сигналы в зависимости от двух положений. Когда кушетка находится в первом положении, контроллер может генерировать первый управляющий сигнал, имеющий первую величину, подаваемый посредством первого выхода 111. В то же самое время, когда кушетка находится в первом положении, контроллер может генерировать второй управляющий сигнал, имеющий первую величину, подаваемый посредством второго выхода 112 для управления положением и/или ориентацией исполнительного механизма позиционирования компьютерного экрана согласно первой величине второго управляющего сигнала.
Когда кушетка находится во втором положении, контроллер может генерировать первый управляющий сигнал, имеющий вторую величину, подаваемый посредством первого выхода 111. В то же самое время, когда кушетка находится во втором положении, контроллер может генерировать второй управляющий сигнал, имеющий вторую величину, подаваемый посредством второго выхода 112, например, для вызова изменения положения исполнительного механизма для принятия положения, связанного со второй величиной.
Контроллер 110 или процессорный блок контроллера могут быть способны исполнять компьютерную программу, включающую в себя условия изменения состояний приспособлений в зависимости от положения кушетки, т.е. в зависимости от сигнала с датчика кушетки, как показано выше.
Контроллер 110 может иметь один или более дополнительных входов 121, 122 для приема входных сигналов с других датчиков, устройств, таких как медицинские устройства, или устройств пользовательского ввода, таких как клавишная панель компьютера. Таким образом, генерирование управляющего сигнала с датчика 101 кушетки может дополнительно зависеть от входных сигналов с других входов 121, 122.
Например, когда устройство 181 пользовательского ввода, такое как клавишная панель или иное кнопочное устройство пользователя, соединено с одним или более входами 121, управляющий сигнал может определяться исключительно в зависимости от сигнала с устройства пользовательского ввода или комбинации сигналов от устройства 181 пользовательского ввода и датчика расположения кушетки. Например, устройство 181 пользовательского ввода может быть выполнено с возможностью предоставления возможности медицинскому персоналу вручную отказаться от входных данных датчика кушетки, когда заранее заданная величина сигнала поступает от устройства 181 пользовательского ввода через один из дополнительных входов 131-132. В качестве другого примера контроллер 110 может быть выполнен с возможностью изменения управляющего сигнала, в других случаях определяемого исключительно в зависимости от входного сигнала расположения кушетки, путем предоставления возможности медицинскому персоналу задать изменение состояния одного или более приспособлений, например путем предоставления выбора различных выбираемых изменений или состояний одного или более приспособлений, таких как выбор установочных параметров различных выбираемых положений исполнительного механизма. Таким образом, медицинский персонал имеет возможность задать определяемые пользователем предпочтительные изменения состояний или состояния различных приспособлений, которые будут инициированы, когда кушетка 102 займет заданное положение.
Вместо предоставления возможности задания изменений состояния или в дополнение к нему устройство 181 ввода может обеспечивать изменение состояния приспособления в режиме реального времени. Для этой цели контроллер 110 может быть выполнен так, что когда поступает сигнал, имеющий определенную величину, или когда поступает сигнал от определенного входа 121-122, генерируется управляющий сигнал для изменения состояния приспособления вне зависимости от положения кушетки.
Кушетка 102 может представлять собой специализированную кушетку, выполненную так, что положение кушетки может детектироваться датчиком 101 положения, либо кушетка может представлять собой обыкновенную кушетку, оборудованную, например, отражательными элементами, распознаваемыми датчиком положения. Таким образом, кушетка может входить в состав системы 100 управления рабочей окружающей средой. Точно также каждое из приспособлений 141-143 и каждый из приводов 131-132 может входить в состав системы 100 управления рабочей окружающей средой. Однако приспособления также могут не являться частью системы управления.
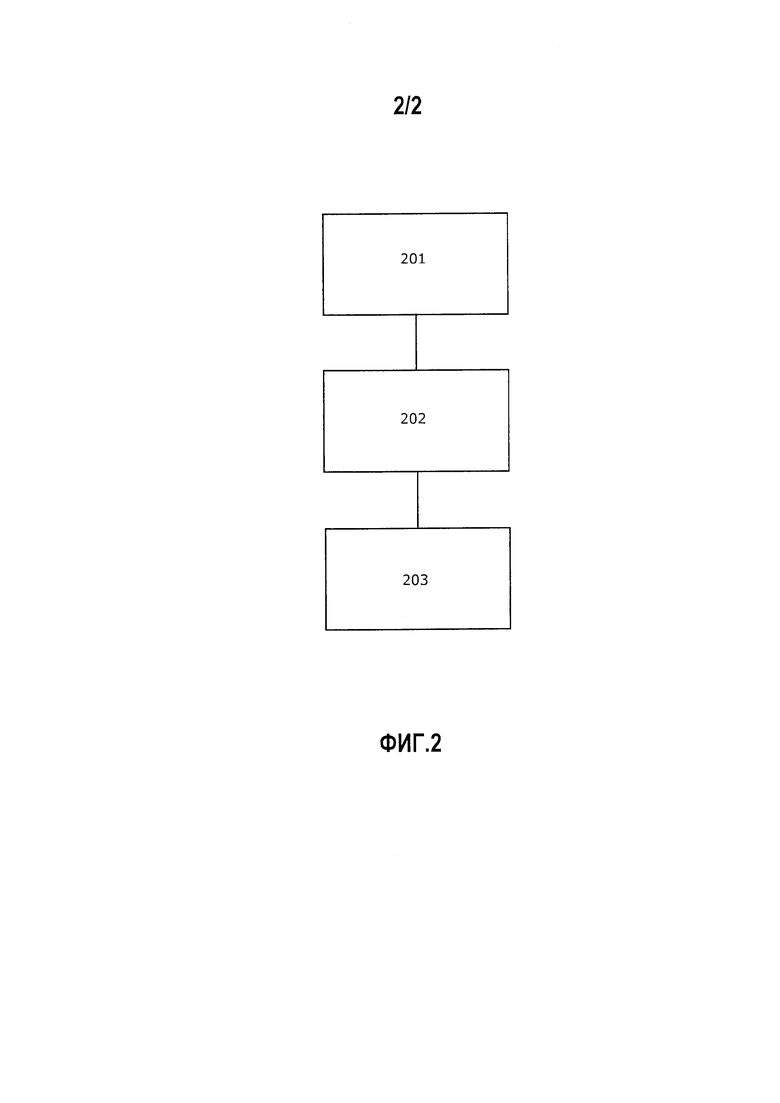
На фиг.2 показаны следующие этапы способа по одному варианту осуществления изобретения:
- этап 201: генерирование сигнала датчика, указывающего положение кушетки, с использованием датчика, расположение которого связано с кушеткой,
- этап 202: генерирование одного или более управляющих сигналов исходя из сигнала датчика, а также
- этап 203: использование одного или более управляющих сигналов для изменения состояния одного или более приспособлений.
Другие варианты осуществления изобретения могут включать в себя другие этапы, такие как генерирование одного или более управляющих сигналов в зависимости от других входных сигналов, таких как входные сигналы от устройства ввода, управляемого пользователем, например клавишной панели компьютера.
Хотя изобретение было подробно проиллюстрировано и описано на чертежах и в вышеприведенном описании, такие иллюстрации и описание следует рассматривать как пример, но не ограничивающими; само же изобретение не ограничено раскрытыми вариантами осуществления. Возможные изменения раскрытых вариантов осуществления станут очевидны специалистам в данной области техники и могут быть реализованы ими после изучения чертежей, раскрытия и прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПЛАНИРОВАНИЯ ЛУЧЕВОЙ ТЕРАПИИ И ПОСЛЕДУЮЩЕГО НАБЛЮДЕНИЯ С ШИРОКОКАНАЛЬНОЙ РАДИУНОКЛИДНОЙ И МАГНИТНО-РЕЗОНАНСНОЙ ВИЗУАЛИЗАЦИЕЙ ИЛИ ШИРОКОКАНАЛЬНОЙ КОМПЬЮТЕРНОЙ ТОМОГРАФИЕЙ И МАГНИТНО-РЕЗОНАНСНОЙ ВИЗУАЛИЗАЦИЕЙ | 2011 |
|
RU2587077C2 |
| СИСТЕМА УПРАВЛЕНИЯ СВЕТОМ ДЛЯ ИСПОЛЬЗОВАНИЯ В БОЛЬНИЧНЫХ УСЛОВИЯХ | 2012 |
|
RU2608180C2 |
| КАТУШЕЧНАЯ КОНСТРУКЦИЯ ДЛЯ СИСТЕМЫ МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ | 2019 |
|
RU2790472C2 |
| ПОДСТАВКА ДЛЯ СУБЪЕКТА ОБСЛЕДОВАНИЯ В СИСТЕМЕ ФОРМИРОВНИЯ ИЗОБРАЖЕНИЙ | 2012 |
|
RU2606586C2 |
| РЕГУЛИРУЕМАЯ ТАКТОВАЯ ЧАСТОТА В БЛОКЕ ИНЪЕКЦИОННОЙ ГОЛОВКИ ДЛЯ СИСТЕМЫ МРТ | 2018 |
|
RU2773374C2 |
| Дистанционно-управляемая система обследования пациентов | 2018 |
|
RU2680796C1 |
| СИСТЕМЫ И СПОСОБЫ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ЗАГРУЗОЧНЫМ КОНЦОМ КОНСОЛЬНОГО ПЕРЕГРУЖАТЕЛЯ | 2019 |
|
RU2755612C2 |
| СПОСОБ ДИАГНОСТИКИ С ПОМОЩЬЮ УЛЬТРАЗВУКОВЫХ, ЗВУКОВЫХ И ЭЛЕКТРОМАГНИТНЫХ ВОЛН | 2007 |
|
RU2378989C2 |
| Устройство и способ блокирования оружия и управления им | 2015 |
|
RU2667813C1 |
| ХИРУРГИЧЕСКИЕ УЗЕЛ И СИСТЕМА, А ТАКЖЕ СХЕМА КОМПЕНСАЦИИ НАПРЯЖЕНИЯ ПОСТОЯННОГО ТОКА | 2018 |
|
RU2766665C2 |
Группа изобретений относится к медицинской технике, а именно к средствам управления приспособлениями для использования со сканером пациента. Система управления рабочей окружающей средой для использования с кушеткой сканера пациента содержит датчик для детектирования положения кушетки и генерирования сигнала датчика, указывающего положение кушетки, контроллер для управления состоянием приспособления в зависимости от сигнала датчика путем генерирования управляющего сигнала исходя из сигнала датчика для вызова изменения состояния приспособления, при этом приспособление представляет собой исполнительный механизм позиционирования для регулирования положения компьютерного экрана или осветительного прибора, либо приспособление представляет собой компьютер, исполняющий компьютерную программу, причем упомянутое состояние изменения представляет собой состояние изменения компьютерной программы. Способ управления одним или более приспособлениями в зависимости от положения кушетки относительно сканера пациента осуществляется с использованием системы управления. Использование изобретений позволяет автоматизировать действия по регулировке приспособлений. 2 н. и 8 з.п. ф-лы, 2 ил.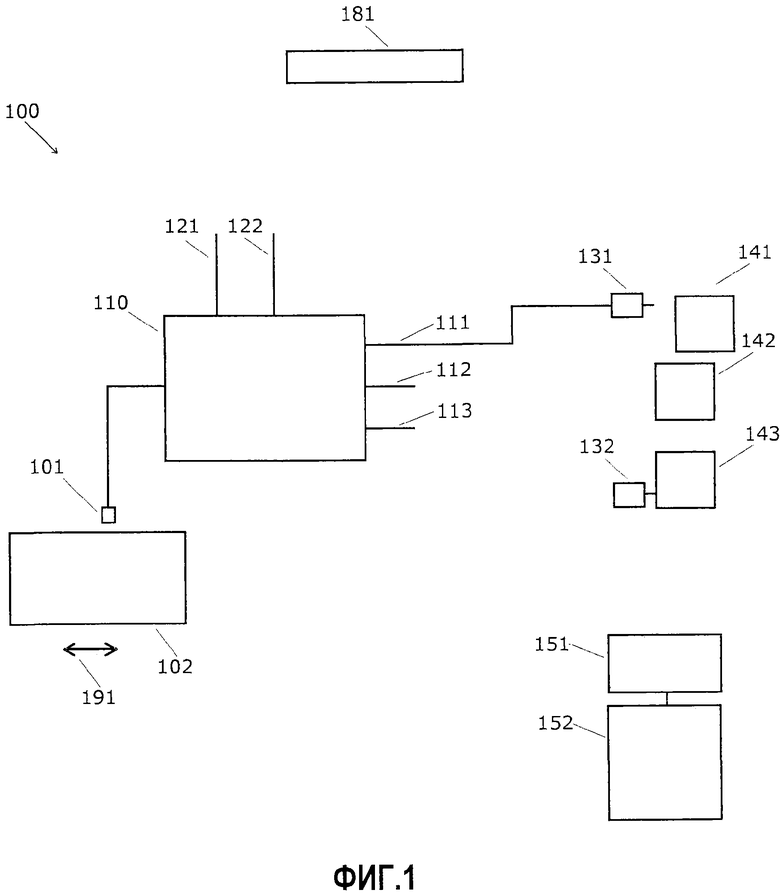
1. Система (100) управления рабочей окружающей средой для использования с кушеткой (102) сканера пациента, причем кушетка является перемещаемой относительно сканера, при этом система содержит:
датчик (101) для детектирования положения кушетки и генерирования сигнала датчика, указывающего положение кушетки,
контроллер (110) для управления состоянием приспособления (141-143) в зависимости от сигнала датчика путем генерирования управляющего сигнала исходя из сигнала датчика для вызова изменения состояния приспособления,
при этом приспособление представляет собой исполнительный механизм позиционирования для регулирования положения компьютерного экрана или осветительного прибора, либо приспособление представляет собой компьютер, исполняющий компьютерную программу, причем упомянутое состояние изменения представляет собой состояние изменения компьютерной программы.
2. Система управления рабочей окружающей средой по п. 1, в которой контроллер выполнен с возможностью генерирования различных управляющих сигналов исходя из сигнала датчика для управления различными приспособлениями (141-143).
3. Система управления рабочей окружающей средой по п. 1, в которой первая величина управляющего сигнала предназначена для вызова первого изменения состояния приспособления (141-143), а вторая величина управляющего сигнала предназначена для вызова второго изменения состояния приспособления (141-143).
4. Система управления рабочей окружающей средой по п. 1, в которой контроллер сконфигурирован обеспечивать возможность предварительно задавать изменение состояния приспособления.
5. Система управления рабочей окружающей средой по п. 1, при этом система управления рабочей окружающей средой содержит устройство (181) ввода, подсоединяемое к контроллеру (110), причем устройство ввода обеспечивает возможность изменения состояния приспособления в режиме реального времени.
6. Система управления рабочей окружающей средой по п. 1, в которой управляющий сигнал подается непосредственно на приспособление через выход (111-113) контроллера.
7. Система управления рабочей окружающей средой по п. 1, при этом система управления рабочей окружающей средой дополнительно содержит привод (131, 132) приспособления, выполненный с возможностью генерирования задающего сигнала для приспособления в зависимости от управляющего сигнала.
8. Системный комплекс кушетки для использования со сканером пациента, при этом системный комплекс кушетки содержит
систему управления рабочей окружающей средой по п. 1,
кушетку (102), выполненную так, что положение кушетки может детектироваться датчиком.
9. Способ управления одним или более приспособлениями (141-143) в зависимости от положения кушетки (102) относительно сканера пациента, при этом способ содержит этапы, на которых:
генерируют (201) сигнал датчика, указывающий положение кушетки, используя датчик (101), расположение которого связано с кушеткой,
генерируют (202) один или более управляющих сигналов исходя из сигнала датчика, и
используют (203) эти один или более управляющих сигналов для изменения состояния одного или более приспособлений,
при этом по меньшей мере одно из приспособлений представляет собой исполнительный механизм позиционирования для регулирования положения компьютерного экрана или осветительного прибора, либо по меньшей мере одно из приспособлений представляет собой компьютер, исполняющий компьютерную программу, причем упомянутое состояние изменения представляет собой состояние изменения компьютерной программы.
10. Способ по п. 9, в котором упомянутые один или более управляющих сигналов используются для управления одним или более из следующего: направление освещения осветительного прибора, ориентация и/или местоположение компьютерного дисплея.
| US 6045262 A, 04.04.2000 | |||
| US 2008204017 A1, 28.08.2008 | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| А.Козачук, OMEGA - новый телеуправляемый стол компании ITALRAY, Медицинский АЛФАВИТ, Радиология. | |||

