Область техники, к которой относится изобретение
Настоящее изобретение относится к области медицины. Более конкретно, настоящее изобретение относится к магнитно-резонансной томографии (МРТ (Magnetic Resonance Imaging (MRI))).
Уровень техники
В дальнейшем будут изложены предпосылки к созданию изобретения с обсуждением технологии, относящейся к этому контексту. Однако даже когда это обсуждение ссылается на документы, акты, артефакты и т.п., оно не предполагает или не представляет, что обсуждаемая технология составляет часть известной техники или является общеизвестным знанием в области, относящейся к настоящему изобретению.
МРТ представляет собой уже ставшую традиционной технологию, которая обычно используется в приложениях медицинской визуализации (например, для диагностических/терапевтических целей). В частности, технология МРТ позволяет получать визуальные представления (изображения) частей тела, находящихся внутри соответствующих пациентов, (и потому скрытых под кожей этих пациентов) по существу неинвазивным способом (т.е. без осуществления каких-либо хирургических операций).
Вообще говоря, технология МРТ основана на воздействии на исследуемую область тела сильного магнитного поля. Поскольку каждая часть тела реагирует на воздействие магнитного поля своим, отличным от других частей тела, способом в соответствии со своей морфологической и/или физиологической структурой, измеряя отклик рассматриваемой части тела на воздействие магнитного поля, можно вывести соответствующие характеристики этой части тела (которые могут быть использованы для создания изображений этой части тела).
Предпочтительно, во время исследования каждого пациента ему вводят один или несколько жидких медицинских препаратов. Например, может быть введено контрастное вещество (или контрастная среда), возможно вместе с физиологическим раствором, чтобы усилить отклик соответствующего целевого признака, т.е. структуры со специфичными характеристиками (такой как известная патология). Контрастное вещество тогда делает какие-либо участки исследуемой части тела, имеющие целевой признак, лучше видимыми в соответствующих изображениях. В результате, целевой признак (который в противном случае мог бы быть трудно отличимым от близлежащих структур, например, от окружающих тканей) оказывается подчеркнут в полученных изображениях. Это значительно облегчает задачу медицинских специалистов (health care professional (HCP)), и, в частности, идентификацию и/или определение характеристик патологии, мониторинг ее развития или реакцию на медицинское лечение.
Контрастное вещество обычно вводят пациенту посредством инъекции. Для этой цели может быть использована (автоматизированная) инъекционная система. Эта инъекционная система сжимает контрастное вещество и вводит его под давлением пациенту в заданных условиях инъекции (например, в специальном темпе и в специальном объеме). Таким способом можно вводить пациенту контрастное вещество управляемым, безопасным и эффективным способом.
Любая система МРТ обладает высокой чувствительностью к возмущающим факторам, которые могут оказать неблагоприятное воздействие на работу системы. Поэтому блок инъекционной головки инъекционной системы (который должен находиться обязательно близко к пациенту во время обследования пациента) должен быть устойчивым к воздействию магнитных полей и по существу совместимым с условиями магнитного резонанса (MR), т.е. этот блок должен быть сконструирован так, чтобы избежать, или по меньшей мере значительно ослабить, любые известные причины помех для работы систем МРТ.
Тем не менее, в очень специфичных ситуациях блок инъекционной головки может вызвать деградацию изображений; в частности, изображение может быть испорчено артефактами в форме аномальных линий, пересекающих это изображение (при этом некоторые участки частей тела могут оказаться затенены или даже исчезнуть). Эта артефакты могут появляться после того, как блок инъекционной головки прослужит относительно продолжительное время. Более того, эти артефакты являются в высокой степени спорадическими; в частности, места появления артефактов на изображениях изменяются в различных рабочих условиях системы МРТ (например, при изменениях позиции блока инъекционной головки, температуры в помещении).
Поэтому, идентификация причин появления артефактов и их удаление представляет сложную задачу. В частности, очень трудно (если не невозможно) воспроизводить артефакты на стадии проектирования инъекционной системы. Более того, обычно невозможно отследить рабочие условия, в которых появляются артефакты в процессе эксплуатации системы. В любом случае, такая инъекционная система может быть использована в сочетании с целым рядом различных систем МРТ, рабочие характеристики большинства из которых в основном отсутствуют в открытом доступе.
Все вышеизложенное может оказать неблагоприятное воздействие на качество изображений, что может привести к неправильной интерпретации результатов обследования соответствующих частей тела (и затем при диагностике/терапии возможных патологий). Более того, это весьма тревожно для медицинских работников и может вызвать соответствующие жалобы (отрицательно сказываясь на удовлетворенности клиентов).
Раскрытие сущности изобретения
Упрощенное краткое изложение существа настоящего изобретения представлено здесь с целью дать базовое представление об этом изобретении; однако единственной целью этого краткого изложения является введение некоторых принципов изобретения в упрощенной форме в качестве прелюдии к последующему более подробному описанию, так что это краткое изложение не следует интерпретировать ни в качестве идентификации ключевых элементов изобретения, ни в качестве установления каких-то границ его объема.
В общих чертах настоящее изобретение основано на идее регулирования тактовой частоты блока инъекционной головки в рабочих условиях системы МРТ.
В частности, один из аспектов предлагает систему МРТ (для генерации одного или нескольких изображений частей тела обследуемого пациента); эта система МРТ содержит блок инъекционной головки (для инъекции пациенту по меньшей мере одного жидкого медицинского препарата), содержащий тактовый модуль для генерации тактового сигнала с тактовой частотой. Система МРТ содержит средства для регулирования тактовой частоты в ответ на поданную вручную команду и/или при обнаружении деградации изображения.
Следующий аспект предлагает инъекционную систему для использования в системе МРТ.
Еще один аспект предлагает соответствующий способ для управления блоком инъекционной головки.
Следующий аспект предлагает компьютерную программу для осуществления этого способа.
Еще один аспект предлагает соответствующий компьютерный программный продукт.
Более конкретно, один или несколько аспектов настоящего изобретения установлены в независимых пунктах Формулы изобретения, а предпочтительные признаки этого изобретения установлены в зависимых пунктах Формулы изобретения, с формулировкой всех пунктов Формулы изобретения, которая включена сюда дословно посредством ссылки (при этом любые предпочтительные признаки, предлагаемые со ссылками на какой-либо конкретный аспект, применяются с соответствующими изменениями к любому другому аспекту).
Краткое описание чертежей
Техническое решение согласно настоящему изобретению, равно как и другие признаки и преимущества настоящего изобретения, будут наилучшим образом поняты со ссылками на последующее подробное описание, данное только посредством неограничивающих примеров, которое (описание) следует читать в сочетании с изучением прилагаемых чертежей (здесь, в целях простоты, соответствующим элементам присвоены одинаковые или подобные позиционные обозначения, и пояснения для этих элементов не повторяются, а название каждого объекта используется для обозначения и этого объекта и его атрибутов, таких как величина, контент и представление). В этом отношении, явно предполагается, что эти чертежи не обязательно выполнены в масштабе (так что некоторые элементы могут быть специально подчеркнуты или упрощены) и что, если не указано иное, они используются просто для иллюстрации структур и процедур, описываемых здесь концептуально. В частности:
фиг. 1 показывает графическое представление системы МРТ, в которой может быть реализовано техническое решение согласно одному из вариантов настоящего изобретения;
фиг. 2 показывает графическое представление блока инъекционной головки, в котором может быть реализовано техническое решение согласно одному из вариантов настоящего изобретения;
фиг. 3 показывает основные компоненты аппаратуры, которые могут быть использованы для реализации технического решения согласно одному из вариантов настоящего изобретения;
фиг. 4 показывает основные компоненты программы, которые могут быть использованы для реализации технического решения согласно одному из вариантов настоящего изобретения;
фиг. 5A – 5B показывают диаграмму активности, описывающую последовательность операций относительно реализации технического решения согласно одному из вариантов настоящего изобретения.
Осуществление изобретения
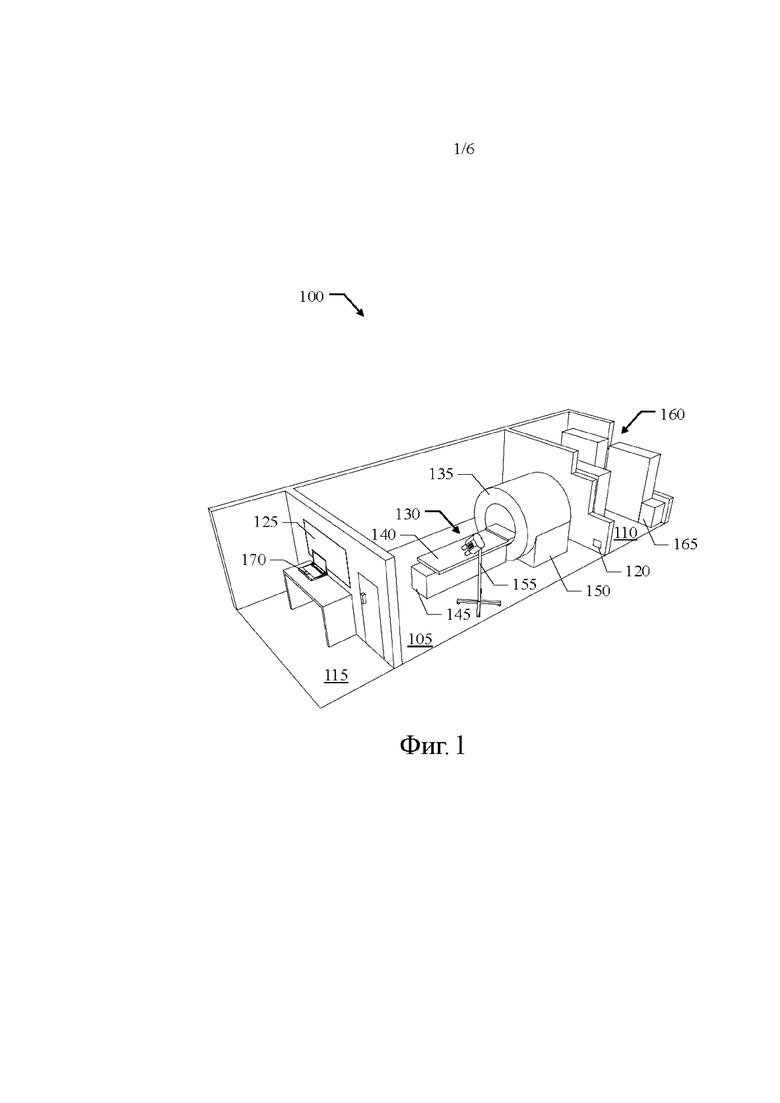
На фиг. 1 изображено графическое представление системы МРТ 100, в которой может быть реализовано техническое решение согласно одному из вариантов настоящего изобретения.
Систему МРТ 100 устанавливают на объекте, содержащем помещение 105 для сканера, помещение 110 для оборудования и отсек 115 управления. Помещение 105 для сканера используется для экранирования системы МРТ 100; в частности, помещение 105 для сканера реализует высокочастотное экранирование (Radio-Frequency (RF)) (для блокирования или по меньшей мере значительного ослабления высокочастотного излучения извне, которое может оказать неблагоприятное воздействие на работу системы МРТ 100), магнитное экранирование (для блокирования или по меньшей мере значительного ослабления любого просачивания магнитного поля извне, которое могло бы быть вредным для человека) и акустическое экранирование (для блокирования или по меньшей мере значительного ослабления передачи извне шумов, которые могут беспокоить людей). Помещение 110 для оборудования используется для поддержки работы системы МРТ 100; это помещение 110 для оборудования сообщается с помещением 105 для сканера через экранированную коммутационную панель 120, оснащенную ВЧ-фильтрами и волноводами (чтобы избежать или по меньшей мере в значительно уменьшить потери экранирования помещения 105 для сканера). Отсек 115 управления используется для управления работой системы МРТ 100 посредство медицинских работников-специалистов; отсек 115 управления имеет окно 125 для визуального контроля помещения 105 для сканера.
Система МРТ 100 содержит следующие компоненты, расположенные в помещении 105 для сканера. Сканер 130 МРТ содержит гентри (раму) 135 (в форме полого цилиндра) с отверстием для приема пациента, которого нужно обследовать (не показан на чертеже). Внутри этого гентри 135, как в корпусе, расположены не видимый на чертеже сверхпроводниковый (или постоянный) магнит (для генерации очень сильного стационарного магнитного поля, например, порядка 1-9 Тл), несколько градиентных катушек для разных осей (связаны со сверхпроводниковым магнитом для регулирования стационарного магнитного поля) и ВЧ-катушка (специальной конструкции, такой как поверхностная катушка, седлообразная катушка или катушка Гельмгольца, для подачи магнитных импульсов на часть тела соответствующего типа, которую нужно обследовать, и для приема соответствующих сигналов отклика). Гентри 135 содержит высокочастотный/магнитный экран (на чертеже не виден), окружающий сверхпроводниковый магнит, градиентные катушки и ВЧ-катушку для защиты их от внешних помех и для ограничения генерируемого ими магнитного поля. Сканер 130 МРТ содержит стол 140, на который должен ложиться пациент. Этот стол 140 установлен на основании 145, оборудованном двигателем (не виден на чертеже), для обеспечения горизонтального скольжения стола 140 в отверстие в гентри 135 и из этого отверстия. Контроллер 150 содержит все компоненты, необходимые для возбуждения градиентных катушек и ВЧ-катушки (например, ВЧ-передатчик, выходной усилитель и т.д.) с целью получения сигналов отклика от обследуемой части тела (например, входной усилитель, аналого-цифровой преобразователь (АЦП (Analog-To-Digital Converter (ADC))) и т.п.) и для управления двигателем основания 145. Блок 155 инъекционной головки используется для инъекции пациенту одного или нескольких жидких медицинских препаратов во время обследования.
Система МРТ 100 содержит следующие компоненты, расположенные в помещении 110 для оборудования. В одном или нескольких шкафах 160 для сканера МРТ 135 размещены силовые компоненты (для преобразования и распределения энергии электрического источника питания), градиентные компоненты (для передачи электрического тока в градиентные катушки), ВЧ-компоненты (для передачи электрических импульсов в ВЧ-катушку и приема сигналов отклика) и охлаждающие компоненты (такие как гелиевый насос для обеспечения циркуляции жидкого гелия вокруг сверхпроводникового магнита и теплообменник для охлаждения градиентных катушек). Гидравлический контроллер (или привод) 165 используется для управления блоком 155 инъекционной головки (где блок 155 инъекционной головки и гидравлический привод 165 совместно образуют соответствующую инъекционную систему). Шкафы 160 соединены со сканером МРТ 135, а гидравлический контроллер 165 соединен с блоком 155 инъекционной головки через соответствующие кабели (не показаны на чертеже), проходящие сквозь экранированную коммутационную панель 120.
Система МРТ 100 содержит следующие компоненты, расположенные в отсеке 115 управления. Вычислительная машина или просто компьютер 170 (например, персональный компьютер (Personal Computer, PC)) используется для дистанционного управления сканером МРТ 135 и блоком 155 инъекционной головки; более того, компьютер 170 используется для управления обследованием. Компьютер 170 соединен со шкафами 160 и с гидравлическим контроллером 165 посредством соответствующих кабелей, проходящих извне помещения 105 для сканера (не показаны на чертеже).
Во время работы, каждый раз, когда нужно провести (новое) обследование части тела пациента, медицинские работники выполняют следующие операции (или более). В частности, медицинский работник укладывает пациента на стол 140 (выведенный из гентри 135). Более того, медицинский работник настраивает блок 155 инъекционной головки для обследования и соединяет его с пациентом. Затем медицинский работник включает двигатель основания 145, чтобы стол 140 со скольжением вошел внутрь гентри 135 до тех пор, пока указанная часть тела не достигнет правильного положения в отверстии гентри. В этот момент медицинский работник покидает помещение 105 для сканера. После этого медицинский работник управляет обследованием через компьютер 170 из отсека 115 управления. В частности, медицинский работник выбирает программу инъекций для блока 155 инъекционной головки и запускает ее. Теперь медицинский работник может активизировать гентри 135, чтобы зарегистрировать соответствующие изображения исследуемой части тела, которые сохраняют и представляют на дисплее. После завершения обследования нужной части тела пациента медицинский работник входит в помещение 105 для сканера и включает двигатель основания 145, чтобы вывести стол 140 со скольжением из гентри 135. Этот медицинский работник отсоединяет блок 155 инъекционной головки от пациента, чтобы тот смог сойти со стола 140.
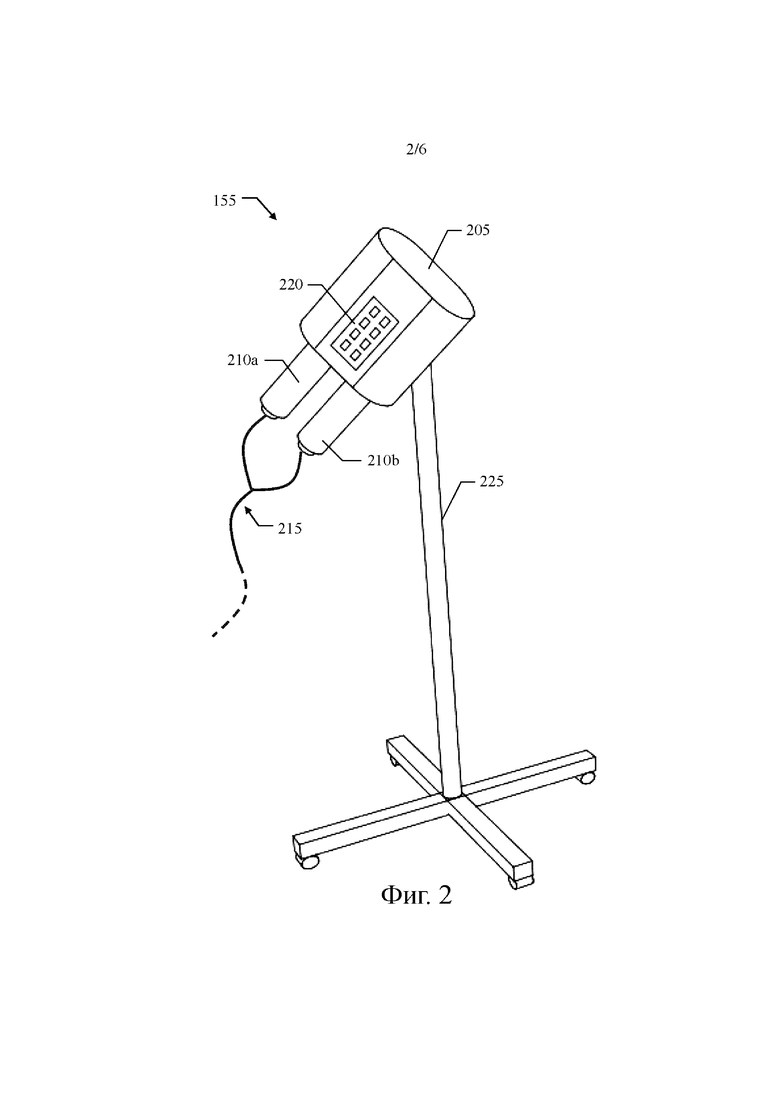
На фиг. 2 показано графическое представление блока 155 инъекционной головки, в котором может быть реализовано техническое решение согласно настоящему изобретению.
Блок 155 инъекционной головки содержит следующие компоненты. Инъекционная головка 205 содержит два шприца 210a и 210b для загрузки и доставки соответствующих жидких медицинских препаратов. Например, такими жидкими медицинскими препаратами являются контрастное вещество (например, комплексное соединение гадолиния для стандартных обследований МРТ или парамагнитное лантанидное комплексное соединение для обследования способом MRI-CEST (магнитно-резонансная томография плюс перенос насыщения химического обмена)), в единственном числе или в сочетании с физиологическим раствором, который может быть введен перед (предварительная «промывка»), после (пост «промывка») или между (межфазно) операциями введения контрастного вещества, либо в последовательности быстрого чередования введения физиологического раствора и контрастного вещества. Инъекционная головка 205 управляет соответствующими поршнями шприцев 210a, 210b (не видны на чертеже) для загрузки жидких медицинских препаратов в шприцы и введения этих препаратов пациенту. Инъекционный комплект 215 используется для соединения шприцев 210a, 210b с пациентом. Например, инъекционный комплект 215 содержит две (гибкие) трубки, соединенные с соответствующими выходными отверстиями шприцев 210a, 210b; Y-соединитель, осуществляет соединение этих трубок с другой (гибкой) трубкой, которая оканчивается соединителем для периферийного катетера. Инъекционная головка 205 имеет панель 220 (например, клавишную панель с рядом мембранных клавиш и рядом светодиодов LED), которая используется для взаимодействия с блоком 155 инъекционной головки. Инъекционная головка 205 установлена на стойке 225. Стойка 225 оснащена колесами, способствующими перемещению всего блока 155 инъекционной головки; более того, эти колеса имеют ножной тормоз для закрепления блока 155 инъекционной головки на месте. В альтернативных вариантах конструкция инъекционной головки 205 может позволять устанавливать ее на потолке или на стене (не показано на чертежах).
Блок 155 инъекционной головки устойчив против воздействия магнитных полей и особенно условий для магнитного резонанса (MR) чтобы избежать или по меньшей мере значительно ослабить любые известные причины помех для работы системы МРТ). Например, блок 155 инъекционной головки не содержит ферромагнитный материал, имеет оболочку, по существу экранирующую высокочастотное излучение, имеет фильтры для усовершенствованной развязки в критических местах, точно откалиброван (с конкретным и ограниченным по величине максимальным допуском) и проверен в заводских условиях и в условиях эксплуатации.
Во время работы, каждый раз, когда нужно провести (новое) обследование части тела пациента, медицинский работник программирует профиль инъекций (содержащий одну или несколько фаз, каждая из которых определена скоростью, объемом и моментом времени, когда следует вводить жидкие медицинские препараты) на компьютере (не показан на чертеже), например, путем выбора между предварительно заданными профилями инъекций для различных видов обследования. Затем медицинский работник загружает в инъекционную головку требуемые жидкие медицинские препараты. С этой целью медицинский работник наклоняет инъекционную головку 205 в позицию загрузки (когда шприцы 210a, 210b обращены вверх, не показано на чертеже) и вводит команду через указанную клавишную панель 220, чтобы побудить инъекционную головку 205 продвинуть поршни шприцев 210a, 210b вперед до достижения переднего конца цилиндров этих шприцев. Медицинский работник соединяет выходные отверстия шприцев 210a, 210b с контейнерами с жидкими медицинскими препаратами (не показаны на чертеже). Медицинский работник вводит на клавишной панели 220 команду, чтобы побудить инъекционную головку 205, отвести поршни шприцев 210a, 210b назад до тех пор, пока в эти шприцы не будут загружены соответствующие количества жидких медицинских препаратов (после этого медицинский работник отсоединяет указанные контейнеры от шприцев 210a, 210b). Медицинский работник вставляет периферийный катетер в периферийную вену пациента и соединяет инъекционный комплект 215 с этим катетером. Медицинский работник наклоняет инъекционную головку 205 в рабочее положение (в котором шприцы 210a, 210b направлены вниз, как показано на чертеже) и вводит команду на клавишной панели 220, чтобы побудить инъекционную головку 205 подать поршни шприцев 210a, 210b вперед для инъекции соответствующих жидких медицинских препаратов согласно выбранному профилю инъекций.
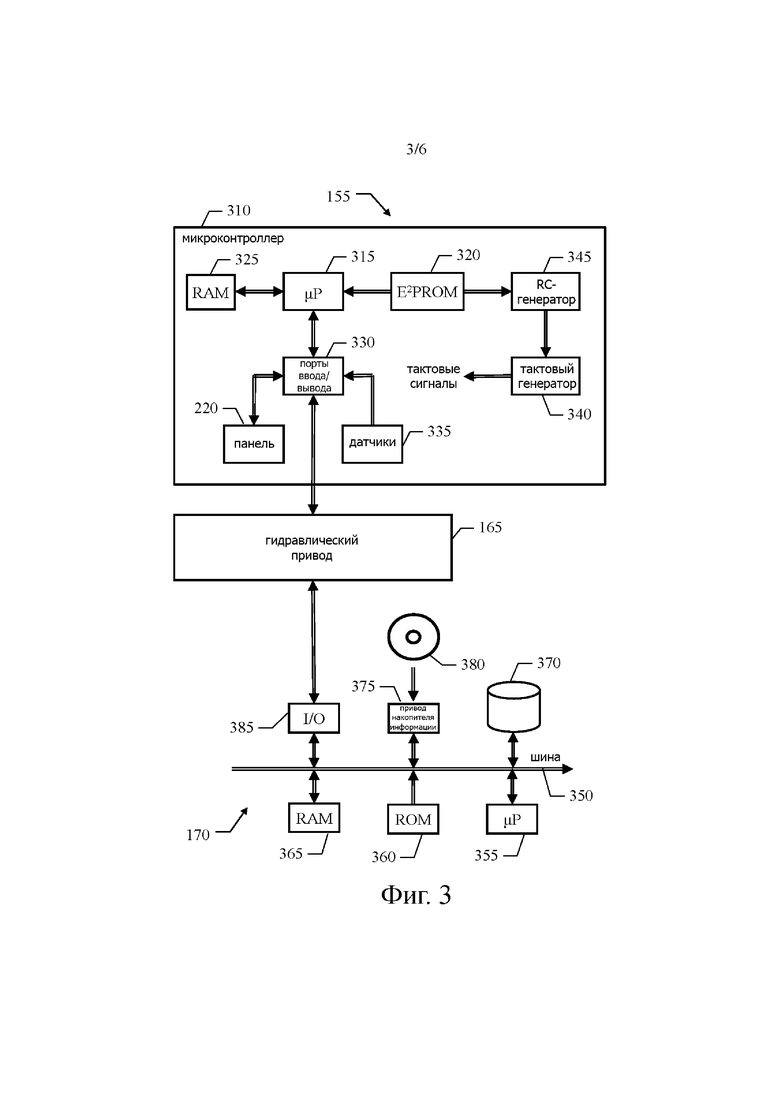
На фиг. 3 показаны основные компоненты аппаратуры, которые могут быть использованы для реализации технических решений, согласно одному из вариантов настоящего изобретения.
Блок 155 инъекционной головки содержит микроконтроллер (или модуль микроконтроллера (MicroController Unit, MCU)) 310. Микропроцессор (µP) 315 управляет работой микроконтроллера 310. Энергонезависимое запоминающее устройство 320 (например, флэш-ЭСППЗУ (электрически стираемое и программируемое постоянное запоминающее устройство (E2PROM))) сохраняет управляющую программу (встроенное запоминающее устройство) для микропроцессора 315, а энергозависимое запоминающее устройство (запоминающее устройство с произвольной выборкой (ЗУПВ (RAM))) 325 используется в качестве рабочего запоминающего устройства для микропроцессора 315. Более того, микроконтроллер 310 содержит ряд портов 330 ввода/вывода (Input/Output (I/O)). Эти порты I/O 330 используются для связи с периферийными модулями блока 155 инъекционной головки и с гидравлическим контроллером 165; в частности, совокупность периферийных модулей блока 155 инъекционной головки содержит клавишную панель и светодиоды LED на панели 220 и один или несколько датчиков 335 (например, датчики давления для шприцев, датчики наклона для инъекционной головки). Тактовый генератор 340 формирует один или несколько тактовых сигналов (с соответствующими тактовыми частотами). Тактовые сигналы представляют собой синхросигналы, мгновенные значения которых колеблются между двумя разными состояниями (например, сигнал прямоугольной формы с коэффициентом заполнения 50%); эти тактовые сигналы используются для синхронизации работы микроконтроллера 310. Например, совокупность тактовых сигналов содержит системный тактовый сигнал для микропроцессора 315 и один или несколько тактовых сигналов ввода/вывода для портов I/O 330. Тактовый генератор 340 использует генератор 345 на основе резистора/конденсатора (Resistor/Capacitor (RC)) (с низким уровнем высокочастотных излучений). Этот RC-генератор формирует опорный тактовый сигнал, используемый для генерации всех тактовых сигналов. Этот опорный тактовый сигнал имеет опорную тактовую частоту, определяемую соответствующей RC-схемой, так что эту опорную тактовую частоту можно подстраивать путем обновления этой RC-схемы (например, емкости одного или нескольких конденсаторов переменной емкости).
Переходя к компьютеру 170, он содержит несколько модулей, соединенных одни с другими посредством структуры шин 350 (с одним или несколькими уровнями). В частности, один или несколько микропроцессоров (µP) 355 управляют работой компьютера 170; энергонезависимое запоминающее устройство (постоянное запоминающее устройство, ПЗУ (ROM)) 360 сохраняет базовый код для загрузки компьютера 170 и энергозависимое запоминающее устройство (ЗУПВ (RAM)) 365 используется в качестве рабочего запоминающего устройства микропроцессорами 355. Компьютер 170 оснащен запоминающим устройством большой емкости для сохранения программ и данных; в частности, запоминающее устройство большой емкости содержит один или несколько жестких дисков 370 и привод 375 накопителя информации для чтения/записи оптических дисков 380 (например, компакт-дисков (CD) или цифровых универсальных дисков (DVD)). Более того, компьютер 170 содержит несколько контроллеров для управления периферийными (I/O) устройствами 385; например, совокупность периферийных устройств 385 содержит клавиатуру, мышь, монитор, сетевой адаптер (плату сетевого интерфейса, NIC) для соединения со шкафами системы МРТ, с гидравлическим контроллером 165 блока 155 инъекционной головки и с сетью связи, такой как Интернет (на чертеже не показана).
Техническое решение согласно одному из вариантов настоящего изобретения (как подробно будет описано далее) позволяет регулировать любую тактовую частоту (от текущей величины этой частоты до ее новой величины) в рабочих условиях системы МРТ, т.е. когда система МРТ находится на месте эксплуатации (например, на месте установки системы МРТ) и готова к использованию медицинскими работниками для обследования частей тела пациентов (и все это, не требуя никакого специализированного оборудования, которое могло бы в противном случае быть доступным только в заводских условиях). Для этой цели в системе МРТ создана структура памяти, сохраняющая несколько значений-кандидатов тактовой частоты (например, список/диапазон таких значений). Новую величину тактовой частоты выбирают из этих значений-кандидатов в ответ на введенную вручную команду и/или на обнаружение деградации изображений.
Это техническое решение исходит из интуитивного понимания, что гармоники соответствующего тактового сигнала могут создавать помехи для рабочей частоты сканера МРТ, и в частности для рабочей частоты его ВЧ-катушки (обычно имеющей величину порядка нескольких МГц и изменяющейся вместе со стационарным магнитным полем, генерируемым сверхпроводниковым магнитом сканера). Более конкретно, когда какая-либо гармоника тактового сигнала близка к рабочей частоте сканера МРТ, остаточное высокочастотное излучение блока инъекционной головки (после экранирования) может оказывать неблагоприятное воздействие на работу сканера МРТ в сочетании с некоторыми обстоятельствами (например, смещение компонентов, положение блока инъекционной головки, температура в помещении).
Предлагаемое техническое решение позволяет устранить или по меньшей мере значительно ослабить любую деградацию генерируемых системой МРТ изображений, которая может быть вызвана влиянием тактовых сигналов; в результате, эти изображения оказываются совсем свободными от артефактов, которые могли бы повредит изображения, либо по меньшей мере значительно меньше подвержены воздействию этих артефактов.
Таким образом, можно своевременно вмешаться (вручную или автоматически) в любую ситуацию. В частности, можно вмешаться непосредственно на месте сразу же, как только появится артефакт, даже если такой артефакт возникает после того, как блок инъекционной головки уже отработал довольно продолжительное время, спорадически, в различных рабочих условиях системы МРТ, в различных системах МРТ. Напротив, предлагаемое техническое решение позволяет применять его немедленно (не требуя каких-либо исследований для идентификации фактической причины возникновения артефактов в конкретных условиях и значений-кандидатов тактовой частоты, которые могли бы устранить эти артефакты) и независимо от системы МРТ, в которой используется рассматриваемая инъекционная система.
Все вышеизложенное повышает качество изображений и точность обследования соответствующих частей тела (и вследствие этого диагноза/терапии возможных топологий). Более того, это оказывает благоприятное воздействие на соответствующую удовлетворенность потребителей.
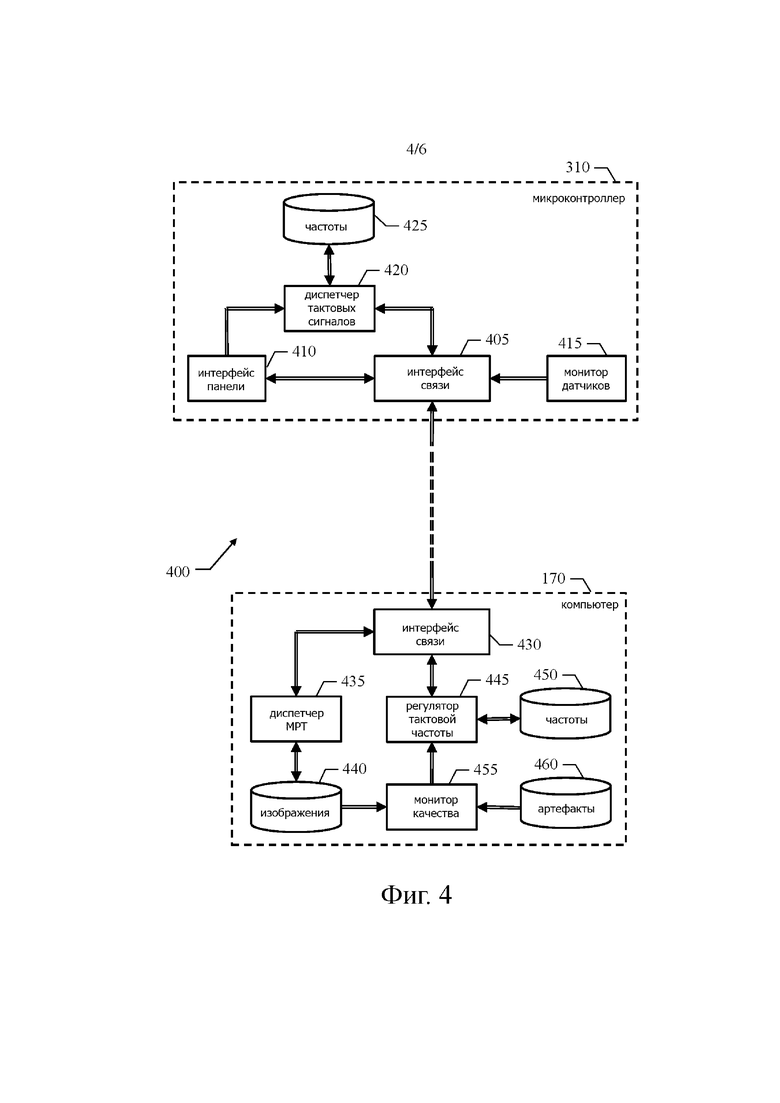
На фиг. 4, показаны основные программные компоненты, которые могут быть использованы для осуществления технического решения согласно одному из вариантов настоящего изобретения.
В частности, все компоненты программ (выполняемые компоненты и данные) обозначены в целом позицией 400. Здесь каждый выполняемый компонент может представлять собой модуль, сегмент или часть кода, который содержит одну или несколько команд для осуществления специфицированной логической функции.
Начиная от микроконтроллера 310 блока инъекционной головки, его программные компоненты реализуют встроенное программное обеспечение (низкого уровня), управляющее компонентами аппаратуры микроконтроллера 310. Это встроенное программное обеспечение сохраняется в энергонезависимом запоминающем устройстве и загружается (по меньшей мере частично) в рабочее запоминающее устройство микроконтроллера 310, когда работают соответствующие выполняемые компоненты. Это встроенное программное обеспечение предварительно инсталлировано в энергонезависимом запоминающем устройстве, например, от внешнего компьютера (не показан на чертеже). В частности, встроенное программное обеспечение микроконтроллера 310 содержит следующие программные компоненты.
Интерфейс 405 связи (микроконтроллера) используется для связи с компьютером 170 (через гидравлический контроллер, не показанный на чертеже). Интерфейс 410 панели управляет панелью инъекционной головки; в частности, интерфейс 410 панели принимает команды, вводимые с клавишной панели, и управляет светодиодами (LED) панели. Монитор 415 датчиков собирает соответствующие результаты измерений, передаваемые датчиками инъекционной головки (например, с использованием технологии опроса). Оба устройства – и интерфейс 410 панели, и монитор 415 датчиков, взаимодействуют с интерфейсом 405 связи (для передачи команд, введенных с клавишной панели, и результатов измерений, поступающих от датчиков, гидравлическому контроллеру и для приема команд для светодиодов (LED) от гидравлического контроллера). Диспетчер 420 тактовых сигналов управляет тактовыми сигналами микроконтроллера 310. В частности, диспетчер 420 тактовых сигналов устанавливает опорную тактовую частоту и генерирует все тактовые сигналы соответствующим образом. Более того, в техническом решении согласно одному из вариантов настоящего изобретения диспетчер 420 тактовых сигналов далее регулирует опорную тактовую частоту (в ответ на введенную вручную команду и/или на обнаружение деградации изображений). С этой целью диспетчер 420 тактовых сигналов обращается (в режиме чтения/записи) к файлу, сохраняющему информацию 425 о соответствующей частоте (гетеродина). Информация 425 о частоте содержит текущее значение опорной тактовой частоты (например, сохраняемое в предварительно заданной позиции энергонезависимого запоминающего устройства); опорную тактовую частоту предварительно устанавливают (на заводе) на номинальное значение (например, 7.96 МГц в номинальных условиях при напряжении питания, равном 5 В, и температуре в помещении, равной 25°C). Более того, в техническом решении согласно одному из вариантов настоящего изобретения информация 425 о частоте содержит информацию для регулирования опорной тактовой частоты, и в частности, индикацию двух или более значений-кандидатов тактовой частоты. В одной из возможных реализаций информация 425 о частоте содержит список кандидатов, составленный из значений-кандидатов опорной тактовой частоты (содержащий номинальное значение), так что текущее значение опорной тактовой частоты может быть выбрано из этого списка. В другой реализации информация 425 о частоте содержит диапазон кандидатов, куда укладываются значения-кандидаты опорной тактовой частоты (содержит номинальное значение), так что текущее значение опорной тактовой частоты может быть выбрано из этого диапазона. Реализация на основе списка кандидатов проще, тогда как реализация на основе диапазона кандидатов является более гибкой. Диспетчер 420 тактовых сигналов взаимодействует с интерфейсом 410 панели (когда опорную тактовую частоту можно регулировать локально) и/или с интерфейсом 405 связи (когда опорную тактовую частоту можно регулировать дистанционно от компьютера 170).
В любом случае, допустимый диапазон опорной тактовой частоты (определяемый нижним концом и верхним концом списка кандидатов или непосредственно диапазоном кандидатов) относительно мал. Например, опорная тактовая частота имеет некоторый (номинальный) допуск вокруг ее номинального значения, определяющий соответствующий номинальный диапазон, обеспечивающий правильную работу микроконтроллера 310 (например, ±2-4%); тем не менее, RC-генератор откалиброван (на заводе) более точно, так что опорная тактовая частота имеет (фактический) допуск вокруг номинального значения меньше номинального допуска (например, равный 10-25%, предпочтительно равный 12-20% и еще более предпочтительно равный 14-18%, такой как равный 16% от номинального допуска, такой как ±0.4-0.6%). В таком случае, допустимый диапазон определяют вокруг номинального значения в соответствии с предварительно заданной долей (такой как 50-70%) относительно разности между номинальным допуском и фактическим допуском; например, при номинальном значении 7.9600 МГц и номинальном допуске ±3%, если фактический допуск равен ±0.5%, допустимый диапазон может быть 7.96 ± (3-0.5)·0.5% ≈ 7.96 ± 0.01 = 7.86-8.06 МГц. При таком подходе, (отрегулированная) опорная тактовая частота всегда остается в номинальном диапазоне.
Более того, можно также оценить значения-кандидата (на заводе и/или в условиях эксплуатации) путем измерения рабочего параметра микроконтроллера 310 и проверить, находится ли этот параметр в допустимых пределах (обеспечивая правильную работу микроконтроллера 310). Например, таким рабочим параметром является скорость передачи информации через порт ввода/вывода (I/O), используемый для связи с гидравлическим контроллером (эта скорость передачи информации также является косвенной мерой опорной тактовой частоты, поскольку последняя равна скорости передачи информации, умноженной на известный масштабный коэффициент). Скорость передачи информации (среднее число символов в секунду) может быть определена путем измерения (например, посредством осциллографа) времени, необходимого для передачи одного символа, где эти измерения повторяются несколько раз для компенсации различных значений времени задержки переднего (восходящего) и заднего (нисходящего) фронтов символов.
Переходя к компьютеру 170, его программные компоненты реализуют загружаемое программное обеспечение (высокого уровня), осуществляющее функциональные возможности компьютера 170 (вместе с операционной системой и другими прикладными программами, не показанными на чертеже). Это программное обеспечение сохраняют в запоминающем устройстве большой емкости и загружают (по меньшей мере частично) в рабочее запоминающее устройство компьютера 170, когда работают выполняемые компоненты этого программного обеспечения. Это загружаемое программное обеспечение первоначально инсталлируют в запоминающем устройстве большой емкости, например, со сменного носителя информации или из сети связи. В частности, загружаемое программное обеспечение компьютера 170 содержит следующие программные компоненты.
Интерфейс 430 связи (компьютера) используется для связи с микроконтроллером 310 (через гидравлический контроллер) и со сканером МРТ, не показанным на чертеже (через его шкафы). Диспетчер 435 МРТ используется для управления сканером МРТ 135 и блоком 155 инъекционной головки дистанционно; например, диспетчер 435 МРТ позволяет управлять сканером МРТ (т.е. его двигателем и гентри) и инъекционной головкой, и позволяет осуществлять мониторинг работы этих устройств. Более того, для каждого выполняемого в текущий момент обследования диспетчер 435 МРТ принимает сигналы отклика, представляющие отклик от соответствующих позиций обследуемой части тела в ответ на приложенное магнитное поле, и генерирует одно или несколько изображений, представляющих эту часть тела (здесь каждое изображение определено матрицей ячеек, содержащей величины вокселов, определяющих яркость этих ячеек, в функции отклика от соответствующих позиций обследуемой части тела). Диспетчер 435 МРТ позволяет представлять на дисплее, архивировать и экспортировать изображения. С этой целью диспетчер 435 МРТ управляет (в режиме чтения/записи) хранилищем 440 данных для сохранения изображений, по меньшей мере для выполняемого в текущий момент обследования. В техническом решении согласно одному из вариантов настоящего изображения используется регулятор 445 тактовой частоты для дистанционного регулирования опорной тактовой частоты микроконтроллера 310 (вручную или автоматически). Для этой цели регулятор 445 тактовой частоты взаимодействует с интерфейсом 430 связи. Более того, регулятор 445 тактовой частоты управляет (в режиме чтения/записи) файлом, зеркально отражающим информацию 425 о частоте и обозначенным как (дистанционная) информация 450 о частоте. Монитор 455 качества может также осуществлять мониторинг качества изображения и регулирует опорную тактовую частоту соответствующим образом. Монитор 455 качества обращается (в режиме чтения) в хранилище 440 изображений и взаимодействует с регулятором 445 тактовой частоты. Более того, монитор 455 качества обращается (в режиме чтения) в хранилище (известных) артефактов 460. Например, артефакты 460 определены посредством соответствующих структур, которые могут быть предварительно заданы посредством когнитивных технологий (и, в частности, технологий машинного обучения) на основе (образцов) изображений, идентифицированных как изображения, содержащие артефакты; эти образцы изображений могут быть собраны вручную на заводе, загружены из работающих систем МРТ (таких как изображения, распознанные вручную медицинскими работниками или автоматически, когда было предварительно произведено изменение опорной тактовой частоты).
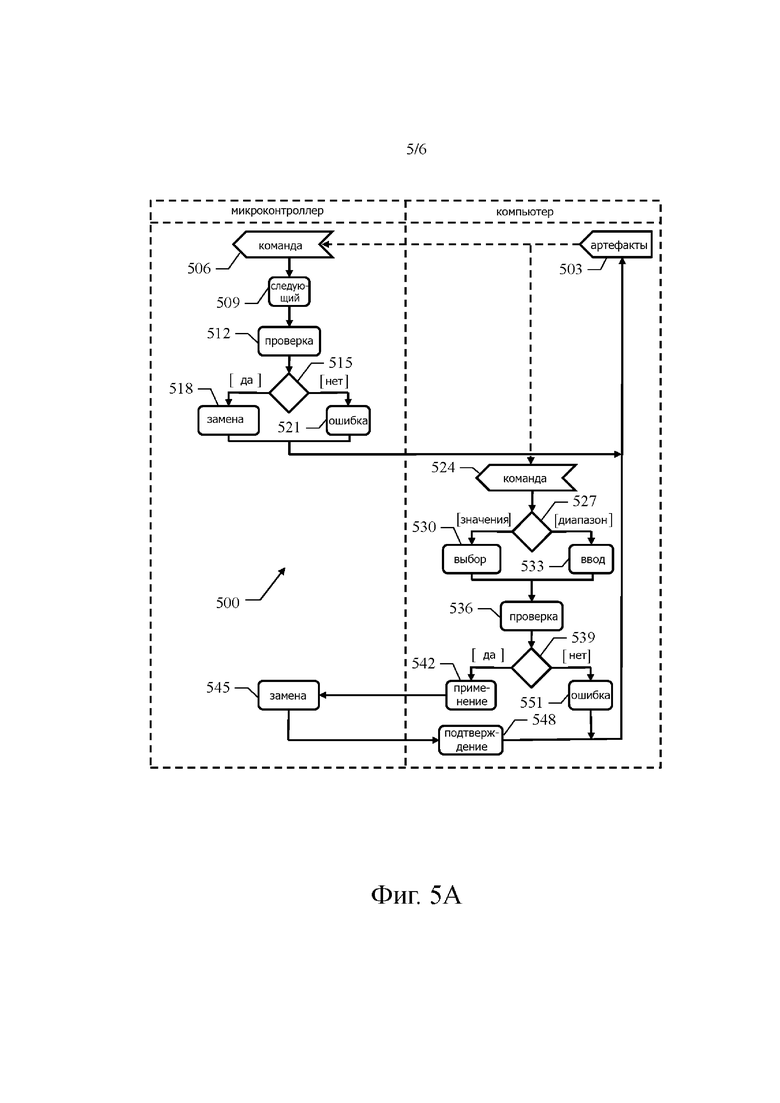
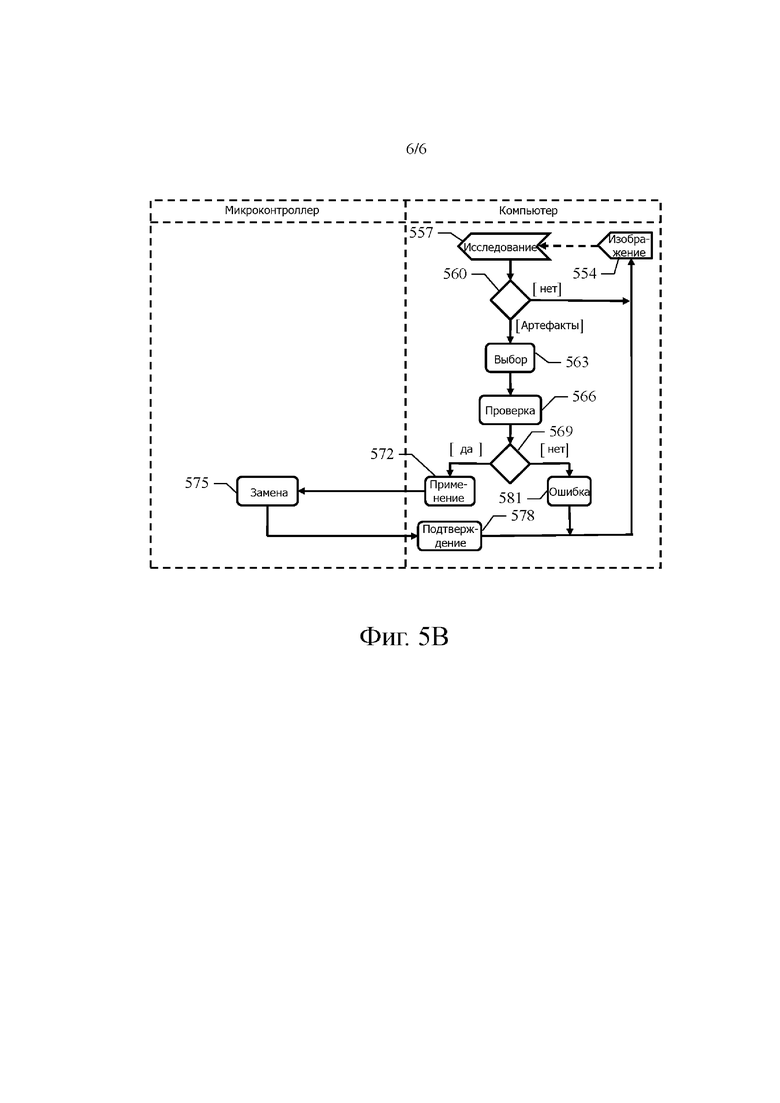
На фиг. 5A – 5B, показана диаграмма активности, описывающая последовательность операций относительно реализации технического решения согласно одному из вариантов настоящего изобретения.
В частности, диаграмма представляет пример процедуры, которая может быть использована для управления системой МРТ (и, в частности, ее блоком инъекционной головки) в целом с использованием способа 500. В этом отношении, каждый блок может соответствовать одной или нескольким выполняемым программам для осуществления специфицированной логической функции компьютера системы МРТ или микроконтроллера блока инъекционной головки.
Начиная с блока 503 в составе «дорожки» компьютера, обычный медицинский работник может обнаруживать (значительные) артефакты в составе изображения; например, это происходит, когда изображения, представленные на мониторе, (для выполняемого в текущий момент обследования) испорчены пересекающими их линиями и/или некоторые участки соответствующей части тела оказываются затенены (вплоть до полного исчезновения).
В одном из вариантов настоящего изобретения, когда это случается, медицинский работник (обычно специалист по МРТ) может попросить другого медицинского работника (обычно медсестру) изменить опорную тактовую частоту блока инъекционной головки. Например, интерфейс панели может быть запрограммирован для распознавания предварительно заданной комбинации клавиш на панели для этой цели (например, две или более клавиш, нажатые вместе). Такой способ позволил добавить возможность изменения опорной тактовой частоты, не требуя модификации физической структуры блока инъекционной головки; более того, эта комбинация клавиш устраняет, или по меньшей мере в значительной степени уменьшает, любой риск случайного изменения опорной тактовой частоты. В частности, перейдя на «дорожку» микроконтроллера, медсестра вводит эту комбинацию клавиш в блоке 506. В ответ на это, в предположении, что локальная информация о частоте, сохраненная в соответствующем файле, содержит список кандидатов (для значений-кандидатов опорной тактовой частоты), диспетчер тактовых сигналов частоты в блоке 509 определяет новое значение опорной тактовой частоты, переходя к следующему значению-кандидату, которое идет после текущего значения, посредством циклического перехода (т.е. простое переключение на следующее значение частоты в случае, когда имеются только два кандидата). Диспетчер тактовых сигналов в блоке 512 проверяет новое значение опорной тактовой частоты (присваиваемое ей предварительно). Например, этот диспетчер тактовых сигналов (через интерфейс связи с микроконтроллером) передает команду проверки гидравлическому контроллеру для измерения скорости передачи информации через соответствующий порт ввода/вывода (I/O), как описано выше) (с использованием очень точного кварцевого генератора) и возвращает измеренное значение тактовому генератору. Эта последовательность операций разветвляется в блоке 515 в соответствии с результатом этой операции. Если скорость передачи информации находится в допустимых пределах, диспетчер тактовых сигналов в блоке 518 заменяет текущее значение опорной тактовой частоты (в файле с локальной информацией о частоте) на новое значение, и это побуждает интерфейс панели инициировать специальное мигание светодиодов (LED) панели (в качестве обратной связи для медсестры об успешном изменении опорной тактовой частоты); в то же время, если система МРТ также поддерживает возможность изменения опорной тактовой частоты дистанционно, с компьютера, диспетчер тактовых сигналов передает соответствующее извещение (содержащее новое значение опорной тактовой частоты) регулятору тактовой частоты в компьютере (через интерфейс связи микроконтроллера), чтобы обновить дистанционную информацию о частоте в соответствующем файле. Напротив, если скорость передачи информации не попадает в допустимые пределы, тактовый генератор в блоке 521 сообщает медсестре о состоянии ошибки, например, путем команды интерфейсу панели включить соответствующий светодиод (LED) на панели. В обоих случаях, процедура возвращается к блоку 503. В частности, когда процедура перейдет к блоку 503 от блока 518, специалист по МРТ может теперь проверить, исчезли ли артефакты реально с изображений; напротив, когда процедура перейдет от блока 503 к блоку 521, работа блока инъекционной головки остается неизменной, так что медсестра может попробовать другое значение-кандидат опорной тактовой частоты (если таковое имеется) или может связаться с соответствующей технической поддержкой.
В дополнение или в качестве альтернативы, когда медицинский работник обнаружит какие-либо (значительные) артефакты на изображениях в блоке 503, он может изменить опорную тактовую частоту непосредственно на компьютере; например, диспетчер МРТ может открыть команду (например, опцию меню) для вызова этой опции, так что эта команда доступна только тогда, когда к диспетчеру МРТ был осуществлен доступ с аккаунта пользователя (защищенного соответствующим паролем), имеющего соответствующую авторизацию. Таким способом возможность изменения опорной тактовой частоты оказывается добавлена, не требуя каких-либо модификаций блока инъекционной головки. В частности, медицинский работник вводит эту команду в блоке 524. Последовательность операций разветвляется в блоке 527 в соответствии с типом информации о частоте. В частности, когда дистанционная информация о частоте содержит список кандидатов (значения-кандидаты опорной тактовой частоты), регулятор тактовой частоты в блоке 530 предлагает медицинскому работнику выбрать новое значение опорной тактовой частоты из совокупности значений-кандидатов, отличных от текущего значения (причем эта операция осуществляется автоматически, когда имеются только два значения-кандидата). Напротив, когда дистанционная информация о частоте содержит диапазон кандидатов (значений-кандидатов опорной тактовой частоты), регулятор тактовой частоты в блоке 533 предлагает медицинскому работнику ввести новое значение опорной тактовой частоты в пределах диапазона кандидатов (например, путем печати или перемещения соответствующего ползунка). В обоих случаях регулятор тактовой частоты в блоке 536 проверяет новое значение опорной тактовой частоты (присваиваемое ей предварительно) Например, регулятор тактовой частоты (через интерфейс связи компьютера) передает команду проверки гидравлическому контроллеру, где эта команда проверки побуждает гидравлический контроллер измерить скорость передачи информации через соответствующий порт ввода/вывода (I/O), как это указано выше и вернуть измеренную величину регулятору тактовой частоты. Последовательность операций разветвляется в блоке 539 согласно результату этой операции. Если скорость передачи информации находится в допустимых пределах, регулятор тактовой частоты в блоке 542 передает команду в блок инъекционной головки (через интерфейс связи компьютера) для изменения опорной тактовой частоты к новому значению. Переходя к «дорожке» микроконтроллера в ответ на это, диспетчер тактовых сигналов в блоке 545 заменяет текущее значение опорной тактовой частоты (в файле локальной информации о частоте) на новое значение, принятое от компьютера, и возвращает компьютеру сообщение подтверждения. Возвращаясь к «дорожке» компьютера, как только регулятор тактовой частоты примет это сообщение подтверждения в блоке 548, он представляет на дисплее соответствующее извещение об успешном изменении опорной тактовой частоты; в то же время, регулятор тактовой частоты должным образом обновляет дистанционную информацию о частоте в соответствующем файле. Возвращаясь к блоку 539, если скорость передачи информации не попадает в допустимые пределы, регулятор тактовой частоты в блоке 551 представляет на дисплее извещение о соответствующем состоянии ошибки. В обоих случаях процедура возвращается к блоку 503 либо от блока 548, либо от блока 551. В частности, когда процедура перейдет к блоку 503 от блока 548, медицинский работник может проверить, действительно ли артефакты исчезли с изображений, как описано выше; напротив, когда процедура перейдет к блоку 503 от блока 551, работа блока инъекционной головки остается неизменной, а медицинский работник может осуществить дальнейшие попытки изменить опорную тактовую частоту (если возможно), либо он сможет связать с соответствующей службой технической поддержки, как это описано выше.
В дополнение или в качестве альтернативы, непрерывно осуществляется цикл для запуска изменения опорной тактовой частоты автоматически. Цикл начинается в блоке 554, всякий раз, когда диспетчер МРТ добавляет (новое) изображение в соответствующее хранилище. В ответ на это монитор качества в блоке 557 исследует это изображение для проверки, содержит ли это изображение какие-либо (известные) артефакты; например, монитор качества применяет когнитивную технологию (и, в частности, технологию обнаружения объектов) для обнаружения возможных артефактов (как они определены в соответствующем хранилище) в изображении. Последовательность операций разветвляется в блоке 560 в соответствии с результатом этой операции. Если в составе изображения были обнаружены один или несколько артефактов с приемлемой степенью достоверности (например, выше заданной пороговой величины, такой как 50-70%), регулятор тактовой частоты в блоке 563 выбирает новое значение опорной тактовой частоты; например, новое значение частоты выбирают (чтобы одно отличалось от текущего значения) (псевдо)случайным способом из списка величин-кандидатов или диапазона кандидатов (значения-кандидаты тактовой частоты). Регулятор тактовой частоты в блоке 566 проверяет новое значение опорной тактовой частоты, как описано выше. В этом случае, последовательность операций разветвляется в блоке 569 в соответствии с результатом этой операции. Если скорость передачи информации находится в допустимых пределах, регулятор тактовой частоты в блоке 572 передает команду в блок инъекционной головки (через интерфейс связи компьютера) для изменения опорной тактовой частоты к новой величине. Перейдя к «дорожке» микроконтроллера, в ответ на это тактовый диспетчер в блоке 575 заменяет текущее значение опорной тактовой частоты (в файле локальной информации о частоте) новым значением, принятым от компьютера, и возвращает сообщение подтверждения компьютеру. Вернувшись к «дорожке» компьютера, как только регулятор тактовой частоты примет сообщение подтверждения в блоке 578, он представляет соответствующее извещение об успешности изменения опорной тактовой частицы (например, во всплывающем окне) и обновляет должным образом дистанционную информацию о частоте в соответствующем файле. Возвращаясь к блоку 569, если скорость передачи информации не попадает в допустимые пределы, регулятор тактовой частоты в блоке 581 представляет на дисплее извещение о соответствующем состоянии ошибки (например, снова во всплывающем окне); таким способом медицинский работник оказывается информирован о неудачной попытке изменить опорную тактовую частоту и может действовать соответственно (например, осуществив одну или несколько попыток изменить опорную тактовую частоту вручную, как описано выше). В обоих случаях процедура возвращается к блоку 554 либо от блока 578, либо от блока 581, ожидая следующего изображения.
Естественно, для удовлетворения местных и специальных требований специалист в рассматриваемой области может внести и применить многочисленные логические и/или физические модификации и изменения в настоящем изобретении. Более конкретно, хотя настоящее изобретение было описано с некоторой степенью конкретизации со ссылками на один или несколько вариантов, следует понимать, что возможны разнообразные исключения, замены и изменения формы и деталей, равно как возможны и другие варианты. В частности, различные варианты настоящего изобретения могут быть практически реализованы без каких-то конкретных подробностей (таких как числовые величины), указанных в предшествующем описании, для обеспечения более полного ясного понимания существа изобретения; напротив, хорошо известные признаки могут быть опущены или упрощены, чтобы не загромождать описание необязательными подробностями. Более того, в явном виде предполагается, что конкретные элементы и/или этапы способа, описываемые в связи с каким-либо вариантом настоящего изобретения, могут входить в любой другой вариант в качестве вопроса общего выбора при проектировании. В любом случае, любую числовую величину следует читать как модифицированную словом «около» (если это уже не сделано), и каждый диапазон числовых величин следует рассматривать как в явном виде специфицирующий любое возможное число в континууме, определяемом эти диапазоном (включая конечные точки диапазона). Более того, порядковые или другие индексы могут быть использованы в качестве маркеров для различения элементов, которые имеют одинаковые названия, но сами по себе не обозначают какой-либо приоритет, предшествование или порядок. Термины «включать (в себя)», «содержать», «иметь», «вмещать» и «привлекать» (и любые формы этих терминов) следует считать имеющими открытое, неисчерпывающее значение (т.е. не ограничивающимися только упомянутыми позициями), термины «на основе», «в зависимости от», «согласно», «функция по» (и любые формы этих терминов) следует понимать как неисключительное соотношение (т.е. с возможным вовлечением других переменных), неопределенный артикль (a/an) следует считать указанием на один или более предметов (если в явном виде не указано иное) и термин «предназначенный для» (или какую-либо конструкцию типа «средство плюс функция») следует считать обозначающим какую-либо структуру, приспособленную или конфигурированную для выполнения соответствующей функции.
Например, один из вариантов предлагает систему МРТ. Однако эта система МРТ может быть любого типа (например, стандартная, типа CEST и т.д.).
В одном из вариантов система МРТ предназначена для генерации одного или нескольких изображений части тела обследуемого пациента. Однако эти изображения могут быть получены в любом числе (для каждого обследования) и любого типа (например, черно-белое полутоновое изображение, цветное изображение и т.п.); более того, система МРТ может быть использована для обследования любой части тела (например, органа, ткани) любого пациента (например, человека или животного). В общем, системой МРТ может управлять любой квалифицированный человек (например, какой-либо медицинский работник, такой как врач, рентгенолог, медсестра или группа таких медицинских работников) для любых целей (например, выявление новых патологий, мониторинг известных патологий и т.д.).
В одном из вариантов система МРТ содержит блок инъекционной головки для инъекций по меньшей мере одного жидкого медицинского препарата пациенту. Однако такой блок инъекционной головки может быть любого типа (например, с одним или несколькими шприцами, без шприцев и т.д.); более того, блок инъекционной головки может быть использован для инъекции любого числа и типа жидких медицинских препаратов (например, одного и того же или различных контрастных веществ, индивидуально или в сочетании с физиологическим раствором).
В одном из вариантов, блок инъекционной головки содержит модуль управления, который осуществляет управление работой инъекционной головки. Однако этот модуль управления может быть любого типа (например, микроконтроллер, программируемый логический контроллер (PLC) и т.п.).
В одном из вариантов, блок инъекционной головки содержит тактовый модуль для передачи тактового сигнала с тактовой частотой в модуль управления. Однако тактовый модуль тоже может быть любого типа (например, на основе RC-генератора, кварцевого генератора и т.п., находящегося внутри или вне модуля управления); более того, такой тактовый модуль может генерировать любое число тактовых сигналов другого типа (например, один или несколько тактовых сигналов, генерируемых на основе опорного тактового сигнала, такого как системный тактовый сигнал, тактовый сигнал (ы) ввода/вывода (I/O), только опорный тактовый сигнал и т.п.).
В одном из вариантов, система МРТ содержит структуру памяти, сохраняющую индикацию нескольких значений-кандидатов тактовой частоты. Однако структура памяти может быть любого типа (например, файл, таблица, база данных и другие подобные структуры, размещенные в блоке инъекционной головки, в устройстве управления блоком, в вычислительной машине или в каком-либо сочетании этих узлов); более того, структура памяти может сохранять любую индикацию значений-кандидатов (например, список значений, диапазон значений, правило для вычисления значений и т.д.).
В одном из вариантов система МРТ содержит средства для регулирования тактовой частоты (во время работы этой системы МРТ) от текущего значения к новому значению. Однако такие средства для регулирования могут быть реализованы в любой структуре (например, в ответ на переданную вручную команду, на деградацию изображений или на оба этих фактора) и в любом месте (например, в блоке инъекционной головки, в компьютере, управляющем системой МРТ, в специализированном устройстве или в каком-либо сочетании перечисленных вариантов); более того указанные текущее/новое значения могут быть любого типа.
В одном из вариантов, система МРТ содержит средства для выбора нового значения среди значений кандидатов. Однако новое значение может быть выбрано любым способом (например, вручную, полностью автоматически, автоматически, но с требованием подтверждения вручную, случайным или детерминированным способом, таким как циклическая последовательность с любым шагом, по какой-либо формуле и т.п.) по любому сценарию (т.е. ручному/автоматическому, реализованному в любом месте и т.п.).
В одном из вариантов средства для регулирования содержат средства для ввода регулирующей команды вручную. Однако такая ручная команда может быть введена любым способом (например, с использованием физических или виртуальных элементов, таких как клавиши, опции меню и т.п., а также ввод может быть доступен только специально авторизованному персоналу, либо всем) и в любом месте (см. выше) любым квалифицированным сотрудником (например, медицинским работником, техническим персоналом).
В одном из вариантов средства для регулирования содержат средства для запуска регулирования тактовой частоты в ответ на команду регулирования. Однако процесс регулирования тактовой частоты можно запустить любым способом (например, непосредственно, с требованием дальнейшего подтверждения и т.д.).
В одном из вариантов средства для регулирования содержат средства для мониторинга изображений, генерируемых системой МРТ. Однако мониторинг изображений можно осуществлять любым способом (например, всегда, периодически, в случайные моменты времени, по запросу и т.д.) и в любом месте (см. ниже).
В одном из вариантов средства для регулирования содержат средства для обнаружения деградации изображений в соответствие с появлением артефактов. Однако обнаружение деградации изображений можно осуществлять любым способом (например, с применением когнитивной технологии, технологий нечеткой логики, технологий искусственного интеллекта и т.п., локально или дистанционно, например, с использованием соответствующего сервиса, предоставляемого сетью связи) и в любом месте (см. выше) в соответствии с обнаружением любых артефактов (например, линий, пятен, проколов и т.п.).
В одном из вариантов средства для регулирования содержат дополнительные средства для запуска процедуры регулирования тактовой частоты в ответ на обнаружение деградации изображений. Однако регулирование тактовой частоты можно запускать любым способом (например, автоматически, с требованием подтверждения вручную и т.п.).
В одном из вариантов блок инъекционной головки содержит средства для регулирования. Однако такие средства для регулирования могут быть реализованы в любой структуре в составе блока инъекционной головки (например, в ее модуле управления, в специализированном модуле и т.п.).
В одном из вариантов блок инъекционной головки содержит клавишную панель для ввода команд для управления работой блока инъекционной головки. Однако клавиши могут быть в любом количестве и любого типа (например, мембранные клавиши, виртуальные клавиши на сенсорном экране и т.д.); более того, эти клавиши могут позволить вводить любое количество команд любого типа (например, загрузка, старт, стоп, пауза и т.п.).
В одном из вариантов средства для ввода команды регулирования содержат клавишную панель. Однако команда регулирования может быть введена с клавишной панели любым способом (например, посредством сочетания элементов, созданных для других целей, посредством специализированного элемента или посредством сочетания таких разнотипных элементов).
В одном из вариантов команда регулирования содержит предварительно заданную комбинацию клавиш клавишной панели. Однако такая комбинация клавиш может быть любого типа (например, одновременное нажатие двух или более клавиш, нажатие двух или более клавиш в короткой последовательности и т.п.).
В одном из вариантов система МРТ содержит вычислительную машину для управления работой системы МРТ. Однако вычислительная машина может быть любого типа (например, компьютер, планшет, специализированное устройство и т.п.); более того, вычислительная машина может быть использована для управления работой системы МРТ любым способом (например, путем выполнения частичных, отличных и/или дополнительных операций относительно тех, что описаны выше).
В одном из вариантов вычислительная машина содержит средства для регулирования. Однако эти средства для регулирования могут быть выполнены в любой структуре в вычислительной машине (например, в виде вставки в программу, в виде специализированной программы и т.д.).
В одном из вариантов система МРТ содержит средства для измерения по меньшей мере одного рабочего параметра инъекционной системы. Однако средства для измерения могут быть реализованы в любой структуре (например, в гидравлическом контроллере или в каком-либо другом устройстве управления блоком инъекционной головки, в блоке инъекционной головки, в специализированном устройстве и т.п.); более того, любое число рабочих параметров любого типа (например, относительно портов связи, модулей ввод/вывода (I/O) и т.д.) могут быть измерены любым способом (например, во время нормальной работы инъекционной системы или после остановки ее работы).
В одном из вариантов система МРТ содержит средства для проверки новых значений в соответствии по меньшей мере с одним рабочим параметром. Однако эти средства могут быть реализованы с какой-либо структурой (например, в вычислительной машине, в устройстве управления блоком инъекционной головки, в блоке инъекционной головки и т.д.); более того, новое значение может быть проверено и подтверждено любым способом (например, одноразово, непрерывно и т.д.). В любом случае, этот признак также может быть исключен в любом из описанных выше вариантов настоящего изобретения, вплоть до всех таких вариантов.
В одном из вариантов указанный по меньшей мере один рабочий параметр представляет собой рабочую частоту порта связи блока инъекционной головки. Однако этот порт связи может быть любого типа (например, последовательного типа, параллельного типа и т.д.) для связи блока инъекционной головки с каким-либо другим устройством (например, с устройством управления блоком, с вычислительной машиной и т.п.).
В одном из вариантов система МРТ содержит устройство управления блоком инъекционной головки. Однако это устройство управления может быть любого типа (например, гидравлическое, электрическое и т.д.).
В одном из вариантов средства для измерения входят в состав устройства управления. Однако средства для измерений могут быть реализованы с какой-либо структурой в составе устройства управления (например, в модуле управления, в специализированном модуле и т.д.).
В одном из вариантов структура памяти сохраняет список значений-кандидатов тактовой частоты. Однако этот список кандидатов может быть любого типа (например, список значений-кандидатов, отрицательные и/или положительные сдвиги от номинального значения и т.д.).
В одном из вариантов структура памяти сохраняет диапазон значений-кандидатов тактовой частоты. Однако этот диапазон значений кандидатов может быть любого типа (например, он может быть протяженным вокруг номинального значения в обоих направлениях, только в сторону низких частот или только в сторону высоких частот).
В одном из вариантов тактовая частота имеет номинальное значение с номинальным допуском. Однако эти номинальное значение и номинальный допуск могут быть любой величины (например, с номинальным допуском, который может быть двусторонним, односторонним и т.д.).
В одном из вариантов значения-кандидаты входят в пределы номинального диапазона, определяемого номинальным значением и номинальным допуском. Однако допустимый диапазон, соответствующий значениям-кандидатам, может быть определен любым способом согласно номинальному диапазону (например, вокруг номинального значения в соответствии с любой величиной номинального допуска, либо разница между номинальным допуском и фактическим допуском вплоть до равенства номинальному диапазону). В любом случае, не исключается возможность определения значений-кандидатов любыми возможными способами (даже независимо от номинального диапазона).
В одном из вариантов система МРТ содержит средства для генерации высокочастотных магнитных импульсов. Однако средства для генерации магнитных импульсов могут быть реализованы в любой структуре (например, изменяющейся в зависимости от конкретной обследуемой части тела или универсальной) с целью формирования магнитных импульсов любого типа с любой высокой частотой (фиксированной или переменной).
В одном из вариантов новое значение не имеет гармоник, совпадающих с указанной высокой частотой. Однако такое новое значение может быть задано заранее так, чтобы избежать каких-либо совпадений с любым числом и типом гармоник (вплоть до только основной частоты) высокой частоты (например, отличаться от высокой частоты более чем на некую минимальную величину, вплоть до нуля). В любом случае, не исключается возможность определять новое значение свободно и затем просто проверять его.
В одном из вариантов тактовый модуль содержит RC-генератор для формирования тактового сигнала. Однако такой RC-генератор может быть любого типа (например, с любым числом резисторов и конденсаторов любого типа и т.д.).
В одном из вариантов средства для регулирования содержат средства для настройки RC-генератора в соответствии с новым значением частоты тактового сигнала. Однако эти средства для настройки могут быть реализованы в любой структуре (например, на основе переменных резисторов и/или конденсаторов и т.п.).
Один из вариантов предлагает инъекционную систему для использования в описанной выше системе МРТ (где эта инъекционная система содержит указанный блок инъекционной головки, который в свою очередь содержит указанную структуру памяти, указанные средства для регулирования и указанные средства для выбора). Однако инъекционная система может быть любого типа (например, блок инъекционной головки с устройством управления блоком или только блок инъекционной головки, так что и блок, и устройство управления могут иметь любое число дополнительных компонентов, таких как дистанционное управление и т.п.); более того, инъекционная система может быть выпущена на рынок в качестве автономного изделия для использования с какой-либо системой МРТ, даже стандартного типа.
Один из вариантов предлагает вычислительную машину для управления работой рассмотренной выше системы МРТ, так что эта вычислительная машина содержит указанную структуру памяти, указанные средства для регулирования и указанные средства для выбора. Однако эта вычислительная машина может быть любого типа (см. выше).
В целом, аналогичные соображения применимы, если система МРТ, инъекционная система вычислительная машина имеют каждая другую структуру или содержит эквивалентные компоненты (например, из других материалов) или может иметь другие рабочие характеристики. В любом случае, каждый компонент может быть разделен на большее число элементов, либо два или более компонентов могут быть объединены в одном элементе; более того, каждый компонент может быть повторен для поддержки выполнения соответствующих операций параллельно. Более того, если не указано другое, любое взаимодействие между различными компонентами обычно не обязано быть непрерывным и может быть либо прямым, либо непрямым через один или несколько промежуточных компонентов.
Один из вариант предлагает способ управления блоком инъекционной головки (адаптированной для инъекции по меньшей мере одного жидкого медицинского препарата обследуемому пациенту в системе МРТ, предназначенной для генерации одного или нескольких изображений части тела пациента). Блок инъекционной головки содержит модуль управления для осуществления операции управления блоком инъекционной головки. Этот блок инъекционной головки содержит тактовый модуль для генерации тактового сигнала с тактовой частотой для модуля управления. Способ отличается регулированием тактовой частоты во время работы системы МРТ от текущего значения к новому значению и выбором нового значения из совокупности нескольких значений-кандидатов тактовой частоты на основе индикации, сохраняемой в структуре памяти системы МРТ. Указанный этап регулирования тактовой частоты, содержит ввод команды регулирования вручную и запуск регулирования тактовой частоты в ответ на команду регулирования; в дополнение или в качестве альтернативы указанный этап регулирования тактовой частоты содержит мониторинг изображений, генерируемых системой МРТ, обнаружение деградации изображений в соответствии с артефактами и запуск регулирования тактовой частоты в ответ на обнаружение деградации изображений.
Способ далее содержит этапы для реализации описанных выше функций. Соображения, изложенные выше для системы МРТ и блока инъекционной головки, применяются с необходимыми изменениями к соответствующим этапам способа.
В более общем случае аналогические соображения применимы, если эти же технические решения реализуются вкупе с эквивалентным способом (с использованием аналогичных этапов с теми же функциями с большим числом этапов или их частей, устранив несущественные этапы или добавив этапы-опции); более того, эти этапы могут быть осуществлены в другом порядке, одновременно или с перемежением (по меньшей мере частично).
Один из вариантов предлагает компьютерную программу, конфигурированную таким образом, чтобы осуществлять описанный выше способ, когда компьютерная система выполняет эту программу.
Один из вариантов предлагает компьютерный программный продукт, содержащий читаемый компьютером носитель для хранения информации, на котором записана указанная компьютерная программа, так что когда эта компьютерная программа загружена в рабочее запоминающее устройство компьютерной системы, она конфигурирует эту компьютерную систему для осуществления предложенного способа.
Однако эта компьютерная программа может быть реализована в виде автономного модуля, в виде вставки в ранее существующую компьютерную программу (например, тактовый диспетчер в микроконтроллере блока инъекционной головки или диспетчер МРТ в вычислительной машине системы МРТ) или даже прямо в последней. Эту компьютерную программу можно выполнять в любой компьютерной системе (например, в микроконтроллере блока инъекционной головки, в вычислительной машине системы МРТ, в устройстве управления блока инъекционной головки, в специализированном устройстве, либо автономном, либо с распределенной структурой на основе любой архитектуры, такой как локальная, региональная, глобальная, сотовая или спутниковая сеть связи, и с использованием проводных и/или беспроводных соединений любого типа). В любом случае, аналогичные соображения применимы, если компьютерная программа структурирована другим способом, или если введены дополнительные модули или функции; аналогично, структуры памяти могут быть других типов, либо могут быть заменены эквивалентными объектами (необязательно содержащими физические носители для хранения информации). Компьютерная программа может принимать любую форму, подходящую для использования в какой-либо компьютерной системе (см. выше), тем самым конфигурируя компьютерную систему для осуществления желаемых операций; в частности, компьютерная программа может быть в форме внешнего или резидентного загружаемого программного обеспечения, встроенного программного обеспечения или микрокода (либо в форме объектного кода, либо в форме исходного кода – например, который нужно компилировать или интерпретировать). Более того, можно предоставлять компьютерную программу на любом читаемом компьютером носителе для хранения информации. Этот носитель для хранения информации представляет собой какой-либо материальный носитель (отличный от сигналов, как таковых), который может сохранять команды для использования компьютерной системы. Например, носитель для хранения информации может быть электронного, магнитного, оптического, электромагнитного, инфракрасного или полупроводникового типа; к примерам таких носителей относятся фиксированные диски (на которые может быть предварительно загружена компьютерная программа), съемные диски, флэшки (например, USB) и т.п. Компьютерная программа может быть загружена в компьютерную систему с носителя для хранения информации или через сеть связи (например, Интернет, региональная сеть связи и/или локальная сеть связи, содержащая кабельную линию передачи, волоконно-оптические кабели, беспроводные соединения, сетевые устройства), один или несколько сетевых адаптеров в компьютерной системе, принимающей компьютерную программу из сети связи и направляющей ее для сохранения на одном или нескольких запоминающих устройствах в компьютерной системе. В любом случае, технические решения согласно одному из вариантов настоящего изобретения могут быть реализованы в аппаратной структуре (например, посредством электронных схем, интегрированном в одном или нескольких полупроводниковых кристаллах) либо в комбинации программного обеспечения и аппаратуры, запрограммированной подходящим образом и конфигурированной иным способом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕРАПЕВТИЧЕСКАЯ СИСТЕМА, СОДЕРЖАЩАЯ МОДУЛЬ МРТ И СРЕДСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РЧ-КАТУШКИ | 2015 |
|
RU2683995C2 |
| МАГНИТНО-РЕЗОНАНСНАЯ ТОМОГРАФИЯ С КАТУШКАМИ ОБНАРУЖЕНИЯ РЧ ШУМОВ | 2015 |
|
RU2685057C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ОТЛОЖЕННЫХ ПРОЦЕССОВ ПОСТОБРАБОТКИ ПРИ КОДИРОВАНИИ ВИДЕОИНФОРМАЦИИ | 2018 |
|
RU2728812C1 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ОТЛОЖЕННЫХ ПРОЦЕССОВ ПОСТОБРАБОТКИ ПРИ КОДИРОВАНИИ ВИДЕОИНФОРМАЦИИ | 2021 |
|
RU2825728C2 |
| ВИЗУАЛИЗАЦИЯ СИЛЫ ДАВЛЕНИЯ АКУСТИЧЕСКОГО ИЗЛУЧЕНИЯ | 2016 |
|
RU2711326C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ОТЛОЖЕННЫХ ПРОЦЕССОВ ПОСТОБРАБОТКИ ПРИ КОДИРОВАНИИ ВИДЕОИНФОРМАЦИИ | 2018 |
|
RU2744982C2 |
| УПРАВЛЯЕМАЯ ПОТОКОМ ДАННЫХ КОРРЕКЦИЯ ФАЗОЗАВИСИМЫХ АРТЕФАКТОВ В СИСТЕМЕ МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ | 2018 |
|
RU2764643C2 |
| ТЕЛЕКАМЕРА НА ОСНОВЕ ФОТОПРИЕМНОЙ МАТРИЦЫ ПЗС | 1996 |
|
RU2129337C1 |
| МНОГОФЛЮИДНАЯ СИСТЕМА ДОСТАВКИ С МНОГОРАЗОВЫМ РАСХОДНЫМ КОМПЛЕКТОМ И ЕЕ КОНСТРУКЦИОННЫЕ ОСОБЕННОСТИ | 2016 |
|
RU2824350C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ДИАГНОСТИКИ ТАЗОБЕДРЕННЫХ СУСТАВОВ | 2022 |
|
RU2795658C1 |
Группа изобретений относится к медицинской технике. Раскрыта система МРТ (для генерирования одного или более изображений части тела обследуемого пациента), содержащая блок инъекционной головки для инъекции по меньшей мере одного жидкого медицинского препарата пациенту, имеющий тактовый модуль для генерирования тактового сигнала с тактовой частотой. Система МРТ содержит средство для регулирования тактовой частоты в ответ на введенную вручную команду и/или на обнаружение деградации изображения, а также инъекционную систему для использования в системе МРТ. Кроме того, раскрыты соответствующий способ для управления блоком инъекционной головки, компьютерная программа для осуществления способа и соответствующий программный продукт. Группа изобретений позволяет повысить эффективность обследования пациента при МРТ. 5 н. и 25 з.п. ф-лы, 5 ил.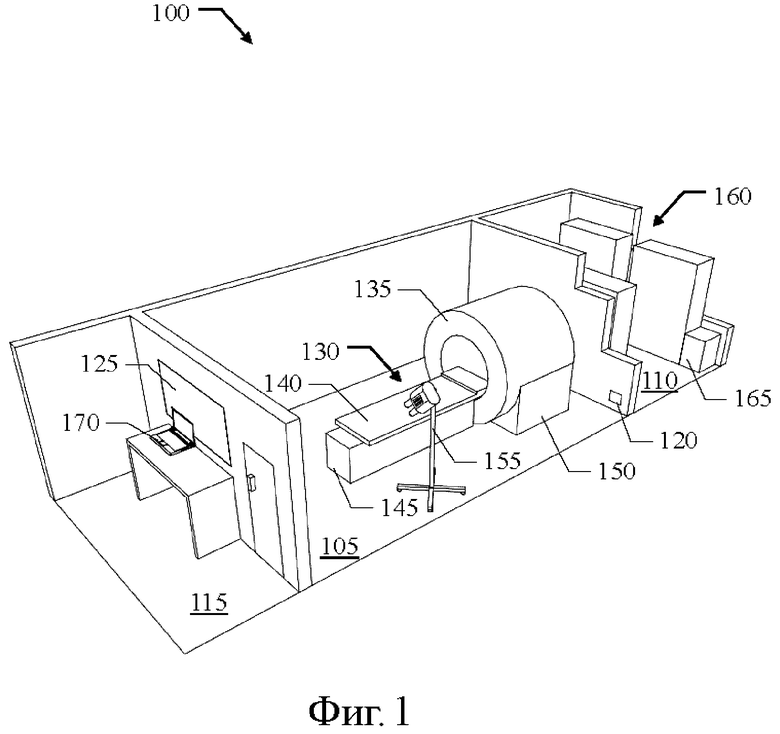
1. Система МРТ (100) для генерирования одного или более изображений части тела обследуемого пациента, содержащая блок инъекционной головки (155) для инъекции по меньшей мере одного жидкого медицинского препарата пациенту, причем блок инъекционной головки (155) содержит модуль управления (310) для управления работой блока инъекционной головки (155) и тактовый модуль (340-345) для подачи тактового сигнала с тактовой частотой в модуль управления (310), отличающаяся тем, что
содержит структуру памяти (425; 450), хранящую указание значений-кандидатов тактовой частоты, средство (420; 445) для автоматического выбора нового значения, отличного от текущего значения тактовой частоты из указанных значений-кандидатов, и средство (405-425; 430-460) для регулирования тактовой частоты от текущего значения к новому значению во время работы системы МРТ (100), причем система МРТ (100) является установкой МРТ, готовой для использования одним или более медицинскими работниками для анализа части тела пациента, причем средство регулирования (405-425; 430-460) содержит:
средство (410; 435) для ручного ввода команды регулирования медицинскими работниками в ответ на обнаружение медицинскими работниками артефактов на изображениях и средство (420; 445) для запуска регулирования тактовой частоты в ответ на команду регулирования; и/или
средство (455) для контроля изображений, генерируемых системой МРТ, средство (455) для обнаружения деградации изображения в соответствии с наличием артефактов, а также средство (445) для запуска регулирования тактовой частоты в ответ на деградацию изображений.
2. Система МРТ (100) по п. 1, в которой средство (420; 445) для выбора выполнено с возможностью выбора нового значения из значений-кандидатов случайным образом.
3. Система МРТ (100) по п. 1 или 2, в которой блок инъекционной головки (155) содержит указанное средство для регулирования (405-425).
4. Система МРТ (100) по п. 3, в которой блок инъекционной головки (155) содержит клавишную панель (220), имеющую клавиши для ввода команд для управления блоком инъекционной головки (155), при этом средство для ввода команды регулирования (410) содержится в клавишной панели (220), а команда регулирования состоит из заданной комбинации клавиш.
5. Система МРТ (100) по любому из пп. 1–4, содержащая вычислительную машину (170) для управления системой МРТ (100), причем вычислительная машина (170) содержит указанное средство для регулирования (430-460).
6. Система МРТ (100) по п. 5, в которой указанное средство для регулирования (430-460) содержит дополнительную структуру памяти (460), хранящую указание одного или более известных артефактов, при этом средство для обнаружения деградации (455) содержит средство (455) для обнаружения деградации в соответствии с результатами сравнения изображений с известными артефактами.
7. Система МРТ (100) по любому из пп. 1–6, содержащая средство (165) для измерения по меньшей мере одного рабочего параметра блока инъекционной головки (155) и средство (445) для проверки указанного нового значения согласно указанному по меньшей мере одному рабочему параметру.
8. Система МРТ (100) по п. 7, в которой указанный по меньшей мере один рабочий параметр представляет собой частоту порта связи (330) в блоке инъекционной головки (155).
9. Система МРТ (100) по п. 7 или 8, содержащая устройство управления (165) для управления блоком инъекционной головки (155), причем указанное средство для измерения (165) содержится в устройстве управления (165).
10. Система МРТ (100) по любому из пп. 1–9, в которой указанная структура памяти (425; 450) хранит список значений-кандидатов тактовой частоты.
11. Система МРТ (100) по любому из пп. 1–10, в которой указанная структура памяти (425; 450) хранит диапазон значений-кандидатов тактовой частоты.
12. Система МРТ (100) по любому из пп. 1–11, в которой тактовая частота имеет номинальное значение с номинальным допуском, причем значения-кандидаты укладываются в пределы номинального диапазона, определяемого номинальным значением и номинальным допуском, в частности находятся вокруг номинального значения в соответствии с разницей между номинальным допуском и фактическим допуском тактовой частоты.
13. Система МРТ (100) по любому из пп. 1–12, содержащая средство (135) для генерирования магнитных импульсов с высокой частотой, при этом новое значение тактовой частоты не имеет гармоник, совпадающих с указанной высокой частотой.
14. Система МРТ (100) по любому из пп. 1–13, в которой тактовый модуль (340-345) содержит RC-генератор (345) для генерирования тактового сигнала, при этом средство для регулирования (405-425; 430-460) содержит средство (420; 445) для настройки RC-генератора в соответствии с новым значением тактовой частоты.
15. Инъекционная система (155, 165) для использования в системе МРТ (100) по любому из пп. 1–14, содержащая блок инъекционной головки (155), содержащий указанную структуру памяти (425), указанное средство для регулирования (405-425) и указанное средство для выбора (420).
16. Вычислительная машина (170) для управления работой системы МРТ (100) по любому из пп. 1–14, содержащая указанную структуру памяти (450), указанное средство для регулирования (430-460) и указанное средство для выбора (445).
17. Способ (500) управления блоком инъекционной головки (155), выполненным в возможностью инъекции по меньшей мере одного жидкого медицинского препарата обследуемому пациенту в системе МРТ (100), выполненной с возможностью генерирования одного или более изображений части тела пациента, причем блок инъекционной головки (155) содержит модуль управления (310) для управления работой блока инъекционной головки (155) и тактовый модуль (340-345) для подачи тактового сигнала с тактовой частотой в модуль управления (310), отличающийся тем, что содержит этапы, на которых:
автоматически выбирают (509; 527-533; 563) новое значение, отличное от текущего значения тактовой частоты из значений-кандидатов тактовой частоты на основе указания, хранящегося в структуре памяти (425; 450) системы МРТ (100), и
регулируют (503-578) тактовую частоту от текущего значения к новому значению во время работы системы МРТ (100), причем система МРТ (100) является установкой МРТ, готовой для использования одним или более медицинскими работниками для анализа части тела пациента,
при этом на этапе регулирования (503-578) тактовой частоты:
вводят (503; 524), при помощи медицинских работников, команду регулирования вручную в ответ на обнаружение медицинскими работниками артефактов на изображениях и запускают (509-521; 527-548) регулирование тактовой частоты в ответ на команду регулирования; и/или
контролируют (554-557) изображения, генерируемые системой МРТ, обнаруживают (560) деградацию изображений в соответствии с появлением артефактов и запускают (563-578) регулирование тактовой частоты в ответ на деградацию изображений.
18. Способ (506-578) по п. 17, содержащий этап, на котором:
регулируют (506-521) тактовую частоту от текущего значения к новому значению под управлением блока инъекционной головки (155).
19. Способ (500) по п. 18, содержащий этап, на котором:
вводят (506) вручную команду регулирования с клавишной панели (220) блока инъекционной головки (155), имеющей клавиши для ввода команд для управления работой блока инъекционной головки (155), причем команда регулирования содержит заданную комбинацию клавиш на клавишной панели (220).
20. Способ (500) по любому из пп. 17–19, содержащий этап, на котором:
регулируют (524-578) тактовую частоту от текущего значения к новому значению под управлением вычислительной машины (170) для управления работой системы МРТ (100).
21. Способ (500) по п. 20, содержащий этап, на котором:
обнаруживают (557) деградацию на основе сравнения изображений с известными артефактами, хранящимися в дополнительной структуре памяти (460) в системе МРТ (100).
22. Способ (500) по любому из пп. 17–21, содержащий этапы, на которых:
измеряют (512; 536; 566) по меньшей мере один рабочий параметр блока инъекционной головки (155), и
проверяют (515; 539; 569) новое значение в соответствии с указанным по меньшей мере одним рабочим параметром.
23. Способ (500) по п. 22, в котором на этапе измерения (512, 536, 566) по меньшей мере одного рабочего параметра:
измеряют (512; 536; 566) частоту порта связи (330) блока инъекционной головки (155).
24. Способ (500) по п. 22 или 23, в котором на этапе измерения (512, 536, 566) по меньшей мере одного рабочего параметра:
измеряют (512; 536; 566) указанный по меньшей мере один рабочий параметр устройством управления (165) для управления блоком инъекционной головки (155).
25. Способ (500) по любому из пп. 17–24, содержащий этап, на котором:
выбирают (509; 527-533; 563) новое значение из списка значений-кандидатов тактовой частоты, хранящегося в структуре памяти (425; 450).
26. Способ (500) по любому из пп. 17–25, содержащий этап, на котором:
выбирают (533; 563) новое значение из диапазона значений-кандидатов тактовой частоты, хранящихся в структуре памяти (425; 450).
27. Способ (500) по любому из пп. 17–26, в котором тактовая частота имеет номинальное значение с номинальным допуском, причем значения-кандидаты укладываются в пределы номинального диапазона, определяемого номинальным значением и номинальным допуском.
28. Способ (500) по любому из пп. 17–27, в котором система МРТ (100) содержит средство (135) для генерирования магнитных импульсов с высокой частотой, при этом новое значение тактовой частоты не имеет гармоник, совпадающих с указанной высокой частотой.
29. Способ (500) по любому из пп. 17–28, в котором на этапе регулирования (503-578) тактовой частоты:
настраивают (518; 542-545, 572-575) RC-генератор (345) для генерирования тактового сигнала в соответствии с новым значением тактовой частоты.
30. Считываемый компьютером носитель для хранения информации с записанной на нем компьютерной программой, загружаемой в рабочее запоминающее устройство компьютерной системы, конфигурируя тем самым компьютерную систему для выполнения способа по любому из пп. 17–29.
| US 2016161578 A1, 09.06.2016 | |||
| US 5494036 A, 27.02.1996 | |||
| US 2003058502 A1, 27.03.2003 | |||
| СИСТЕМА УПРАВЛЕНИЯ ДАННЫМИ ОБ ИНЪЕКЦИИ КОНТРАСТНЫХ ВЕЩЕСТВ | 2012 |
|
RU2634297C2 |
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ИНЪЕКЦИИ КОНТРАСТНОЙ СРЕДЫ ДЛЯ КОНТРОЛЯ ИНТЕНСИВНОСТИ СИГНАЛА ВО ВРЕМЯ МАГНИТНО-РЕЗОНАНСНОЙ АНГИОГРАФИИ | 2012 |
|
RU2603823C2 |

