Настоящее изобретение относится к шарнирному манипулятору, который должен опускаться ниже уровня перекрытия через отверстие, выполненное в последнем для того, чтобы нести и направлять устройство или инструмент любого типа под перекрытием и в направлении поперек от отверстия.
Он может использоваться для отбора проб ядерных отходов, загруженных в специальные вертикальные цилиндрические резервуары, закрытые сверху бетонным перекрытием, которое используется в качестве биологической защиты и в котором выполнено одно центральное отверстие с малой площадью поверхности, и крышка которого при этом снимается. Процедуры отбора проб, существующие в настоящее время, среди которых можно отметить использование длинных стержней, вводимых под углом в отверстие, являются неудобными и не позволяют точно выбрать точку отбора пробы. Шарнирный манипулятор, описываемый здесь, позволяет, с одной стороны, легко производить отбор проб даже вблизи к внешнему краю резервуара, который расположен на самом дальнем расстоянии от отверстия, и имеет преимущество, состоящее в том, что оборудование для отбора проб может быть установлено с большой точностью и без необходимости выполнения каких-либо тонких или утомительных движений. Очевидно, что данное изобретение может применяться с другим оборудованием, кроме инструментов для отбора проб, и, в частности, с датчиками или измерительным оборудованием.
В самом общем виде, настоящее изобретение относится к шарнирному манипулятору, который опускают в отверстие в плите, которую используют в качестве перекрытия для резервуара, при этом манипулятор содержит верхнюю секцию и нижнюю секцию, соединенные вместе с помощью шарнира, средство управления углом между этими секциями, подшипник, установленный вокруг отверстия и содержащий закрепленное кольцо, соединенное с перекрытием, и вращающееся кольцо, соединенное с верхней секцией, средство управления, предназначенное для вращения вращающегося кольца, и инструмент, подвешенный на нижней секции на тросе переменной длины.
При этом совместное движение вращения всего манипулятора вокруг закрепленного кольца и отклонение нижней секции позволяет расположить свободный конец нижней секции под требуемой точкой перекрытия; после этого достаточно опустить инструмент на требуемую высоту так, чтобы он достиг поверхности отходов, пробу которых необходимо отобрать.
Кроме того, нижняя секция выполнена из двух шарнирных частей, возвратный шкив установлен в месте шарнирного соединения между секциями, на свободном конце нижней секции установлен шкив подвески и трос подвески инструмента, который, кроме того, выходит выше перекрытия и манипулятора, проходит под возвратным шкивом и поверх шкива подвески.
Определенные меры, предназначенные для усовершенствования настоящего изобретения, позволяют обеспечить почти полную герметичность, несмотря на необходимость передвижения манипулятора для быстрой сборки и разборки манипулятора и точного управления различными движениями.
В американском патенте 4805650 описан шарнирный манипулятор, опускаемый через отверстие в крышке контейнера и поворачивающийся для ориентирования инструмента для направления воды в контейнер; кроме того, инструмент может опускаться при освобождении троса подвески. Тем не менее, в нем не указано, имеет ли этот манипулятор средство, предназначенное для произвольной регулировки угла между секциями для перемещения конца инструмента в требуемое радиальное положение, поскольку нижняя секция фиксируется в горизонтальном положении на упоре, так, что инструмент удерживается близко к стенке очищаемого контейнера.
Усовершенствование, предлагаемое здесь, состоит в том, что нижняя секция манипулятора сконструирована таким образом, что она имеет две части, шарнирно соединенные вместе. При этом упрощается сборка манипулятора в отверстии перекрытия, так как нижняя секция остается сложенной по отношению к верхней секции и занимает меньше места. После того, как манипулятор будет установлен на вращающемся кольце подшипника, нижняя секция опускается через отверстие в перекрытии, причем эта возможность обеспечивается благодаря тому, что она еще не была раздвинута, и сборка манипулятора заканчивается выдвижением и закреплением двух частей нижней секции внутри резервуара. Манипулятор, таким образом, переходит из сложенного состояния, в котором он может легко устанавливаться, в расправленное состояние, в котором нижняя секция имеет требуемую длину и позволяет осуществлять доступ ко всем местам внутри резервуара. Такая процедура расправления и закрепления может быть выполнена, в частности, благодаря тому, что части нижней секции являются шарнирно соединенными на оси, расположенной на их передних кромках так, что нижняя секция может отклоняться по отношению к верхней секции, при этом средство управления углом, формируемым секциями, содержит реверсивный привод, позволяющий нижней секции отклоняться в двух противоположных направлениях, и части нижней секции содержат запирающее средство на своих задних кромках. Запирающее средство может, в частности, содержать оси на первой из секций, пазы на другой из секций, пружины, которые проталкивают оси из первой секции по направлению к другой из секций, и трос, который можно натягивать для установки осей в первой из секций.
Приведенное ниже описание одного из вариантов воплощения настоящего изобретения, со ссылками на прилагаемые чертежи, позволит лучше понять эти и другие его характеристики и преимущества:
фигура 1 представляет вид всего манипулятора, установленного на месте его применения;
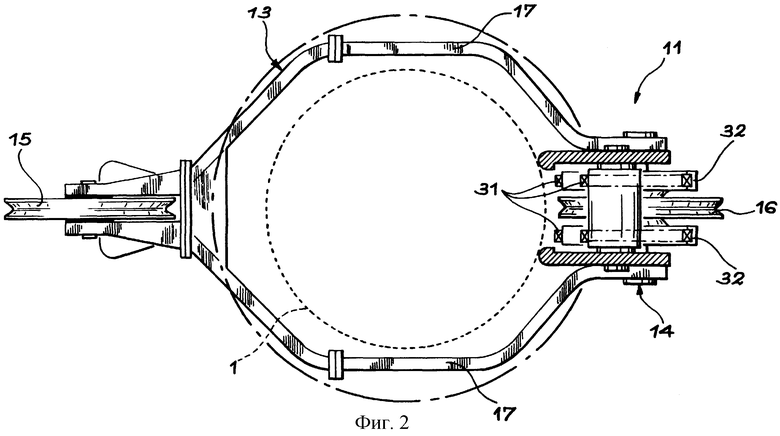
- фигура 2 представляет поперечное сечение манипулятора в месте шарнирного соединения между секциями;
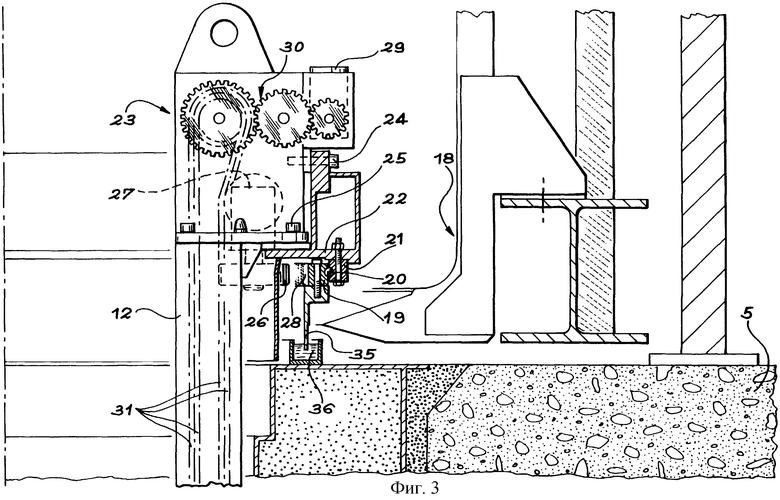
- фигура 3 представляет детали верхней части манипулятора и средства его сборки;
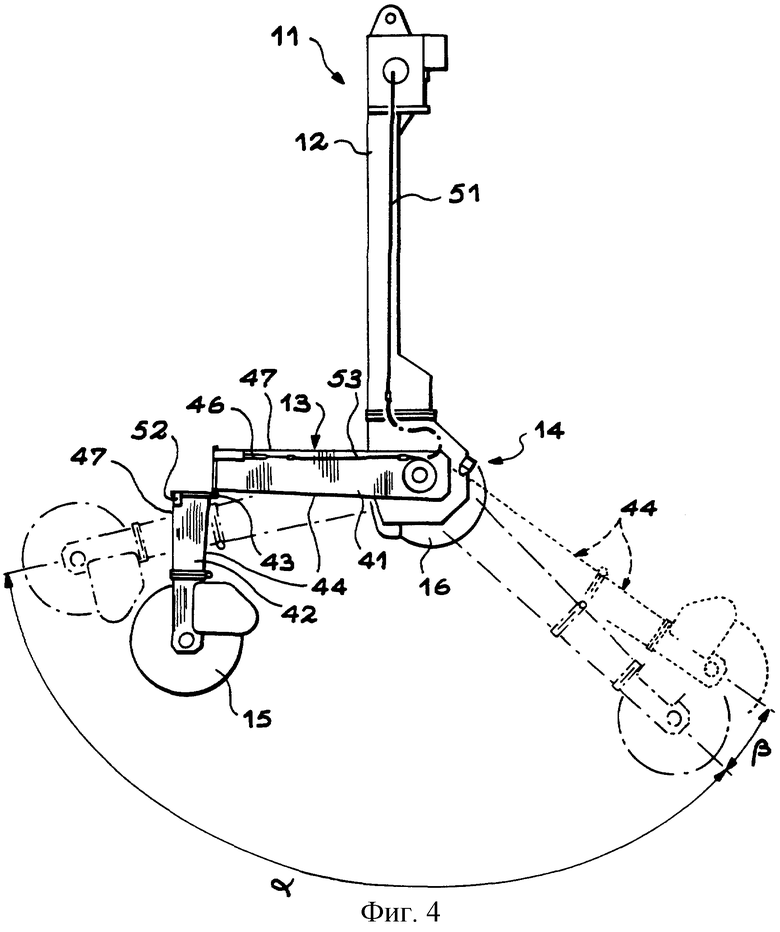
- фигура 4 предназначена для пояснения работы устройства при расправлении и складывании манипулятора.
Сначала опишем фигуру 1. Настоящее изобретение предназначено для обеспечения работы захвата 1, который предназначен для отбора проб отходов, загруженных ранее в резервуар 2 бункера 3, который приблизительно выполнен в форме бутылки с узким отверстием 4 сверху. Бетонная плита 5 закрывает бункер 3 и защищает наружное пространство от излучения, которое может исходить от отходов, однако оно может открываться в месте отверстия 4.
Захват 1 подвешивается на тросе 6, который вверху доходит до мостового крана 7, расположенного с обеих сторон плиты 5 и отверстия 4, и через шкив 8 этого крана 7 проходит в поперечном направлении ко второму шкиву 9, затем по направлению к лебедке 10 с двигателем, которая не показана детально. Это оборудование позволяет опускать захват 1 вниз до поверхности отходов, но не позволяет смещать его в поперечном направлении внутри резервуара 2; шарнирный манипулятор, описанный ниже, устраняет этот недостаток.
Шарнирный манипулятор в целом обозначен цифрой 11 и, по существу, содержит верхнюю секцию 12, опускаемую через отверстие 4, и нижнюю секцию 13, соединенную с предыдущей секцией шарниром 14, и проходящую вглубь резервуара 2, причем на ее свободном конце установлен шкив 15, через который пропущен трос 6. Захват 1, таким образом, свисает вертикально с этого шкива 15 и может быть установлен в любом положении внутри резервуара 2, в зависимости от угла, установленного между секциями 12 и 13 при управлении шарниром 14. Следует отметить, что последний оборудован другим шкивом 16, под которым проходит трос 6 так, что он проходит вблизи к каждой из секций 12 и 13 и тем самым предотвращается его соприкосновение с кромкой отверстия 4. На фигуре 2 можно видеть, что нижняя секция 13 состоит из двух параллельных балок 17, расстояние между которыми достаточно, чтобы захват 1 мог пропускаться между ними (отмечен его внешний контур). Шарнир 14 ориентирован таким образом, что нижняя секция отклоняется в вертикальных расположенных по радиусу плоскостях (проходящих через центральную ось отверстия 4).
Рассмотрим теперь фигуру 3, на которой можно видеть, что на плите 5 установлен каркас 18 вокруг отверстия 4, который, в частности, содержит закрепленное кольцо 19 с шариковым подшипником 20, внешнее кольцо 21 которого, имеющее возможность поворота, соединено с ободом 22, на котором может быть установлена структура 23 опоры, и прикреплена по кругу поперечными винтами 24 и вертикальными винтами 25. Манипулятор 11 подвешивается на структуре 23 опоры. Шестерня 26 двигателя 27 привода, закрепленная на структуре 23 опоры, соединена с зубчатым ободом 28, который сформирован на внутренней поверхности закрепленного кольца 19, причем такая конструкция позволяет при включении двигателя 27 смещать шестерню 26 и, соответственно, структуру 23 опоры и шарнирный манипулятор 11 в целом вдоль зубчатого колеса 28 и вокруг отверстия 4, что позволяет устанавливать нижнюю секцию 13 и захват 1 в требуемом угловом направлении. Структура 23 опоры содержит другой двигатель 29, который приводит в движение ряд зубчатых колес 30 и приводит в движение цепь 31 передачи у ее конца; цепь 31 проходит вдоль верхней секции 12 до шкива 32, установленного на шарнире 14, который прикреплен к нижней секции 13, то есть она представляет собой механизм, который изменяет угол наклона шарнира 14 и смещает нижнюю секцию 13 и шкив 15 по направлению к стенкам бункера 2 на требуемую величину. На фигуре 2 изображено, что цепь 31 и шкив 32 могут быть выполнены двойными и расположены с обеих сторон шкива 16 шарнира, который балансирует усилия, прикладываемые к балкам 17. Применение цепи 31 является предпочтительным по сравнению с другими устройствами в связи с тем, что она проявляет лучшую сопротивляемость механическим нагрузкам и радиации и может быстро собираться и разбираться.
На фигуре 1 изображена крышка 33, которая состоит из двух частей, меньшая из которых 34 имеет профиль, совпадающий с профилем верхней секции 12; крышка 33 устанавливается в отверстии 4 и закрывает его, при полностью убранном шарнирном манипуляторе 11, но часть 34 может сниматься, когда шарнирный манипулятор 11 установлен в отверстии 4 и остается неподвижным; она затем сама устанавливается вокруг верхней секции 12 и обеспечивает практически полную герметичность. Другая мера предосторожности, предназначенная для поддержания герметичности вокруг отверстия 4, обеспечивается с помощью металлической юбки 35, которая установлена вокруг и непрерывно под закрепленным кольцом 19, основание которой погружено в жидкость, налитую в круглую металлическую канавку 36, которая в поперечном сечении представляет собой желоб, расположенный на перекрытии 5 вокруг отверстия 4 (фигура 3).
Сборка начинается путем установки каркаса 18 и обода 22 вокруг отверстия 4, затем шарнирный манипулятор 11 опускается через отверстие 4 и его структура 23 опоры привинчивается к ободу 22. Нижняя секция 13 отклоняется назад в почти горизонтальное положение с направлением влево, как изображено штрихпунктирными линиями на фигуре 1, и затем опускается захват 1 так, что он проходит между балками 17. При обратном повороте нижней секции 13 по направлению вперед шкивом 15 подвески захватывает трос 6. Захват 1 затем переносится в место над требуемой точкой в резервуаре для отбора образца путем смещения шарнирного манипулятора 11 вокруг отверстия 4 для размещения нижней секции 13 в требуемом местоположении и путем смещения захвата 1 на требуемое расстояние от отверстия 4, обеспечивая, таким образом, направление в системе полярных координат. Возможность отвода шарнира назад для прохода захвата 1 и вперед для направления его является важным аспектом устройства благодаря управляемой обратимости движения, выполняемого с помощью цепи 31. Следует отметить, что нижняя секция 13 должна быть выполнена из двух частей, шарнирно соединенных вместе, что теперь будет описано со ссылкой на фигуру 4. Эти две части обозначены позициями 41 и 42 и соединены вместе с помощью оси 43 шарнира, расположенной между их передними кромками 44. При опускании сборки манипулятора 11 они сложены по отношению друг к другу и к верхней секции 12, при этом верхняя часть 41 направлена вверх и весь шарнирный манипулятор 11 сложен приблизительно в виде буквы "N" и имеет незначительную высоту. Когда шарнирный манипулятор 11 собран, нижняя секция 13 опускается внутрь резервуара 2 с поворотом вокруг шарнира, при этом верхняя часть 41, которая выполнена короткой, свободно проходит через отверстие 4. Части 41 и 42 раскрываются так, что они распрямляются и соединяются друг с другом, после чего они могут быть зафиксированы. Фиксирующая система, предлагаемая здесь, содержит, по меньшей мере, одну шпильку 46, установленную снизу верхней части 41, вблизи к задней кромке 47, напротив шарнира 43. Шпилька 46 направлена вниз и выталкивается в этом направлении пружиной, которая не показана, что заставляет ее проходить за пределы верхней части 41. При этом действие пружины ограничено тросом 51, прикрепленным к задней части шпильки 46, и который проходит сначала вокруг шкива 16 шарнира, затем вдоль верхней секции 12 и выходит за пределы плиты 5. Трос 51 может захватываться дистанционным манипулятором или другим устройством и вытягиваться для преодоления действия пружины 48, чтобы вернуть шпильку 46 в верхнюю часть 41 нижней секции 13. Это происходит, когда части 41 и 42 распрямляются при сборке так, что шпилька 46 не мешает сближению задних кромок 47 двух частей 41 и 42; затем трос 51 освобождается так, что шпилька 46 выходит из верхней секции 41 и входит в паз 52, выполненный в нижней части 42, отверстие которого выходит в ее передней части. При этом шпилька 46 соединяется с частями 41 и 42 и предотвращает какое-либо вращение вокруг шарнира 43 до тех пор, пока трос 51 не будет вытянут обратно.
Действие при запирании и раскрытии может быть выполнено автоматически так, что оно не будет зависеть от троса 51, который выходит за пределы отверстия 4 и, таким образом, не будет нарушаться герметичность. Такой трос проходит только до задней части 53 троса 51, причем его конец, противоположный шпильке 46, закреплен в точке 14 сочленения, соединенной с верхней секцией 12 таким образом, что, когда верхняя секция 13 отклоняется в максимальное положение, часть 53 троса самостоятельно наматывается вокруг шарнира 14, натягивается и вытягивает шпильку 46 таким же образом, как было описано выше; при этом часть 53 троса проходит несколько ниже нижней секции 13, освобождает шпильку 46 и позволяет ей войти в паз 52 для обеспечения соединения между частями 41 и 42, как и в предыдущем случае.
Натяжение части троса 53 происходит только в крайних положениях отклонения по направлению вперед, под углом β, который показан на фигуре 4. Угол α соответствует положению отклонения, в котором трос 53 освобождается и запирает соединение частей 41 и 42.
Кулачок, который не показан, но который выполнен, в общем, обычным образом и который приводится в движение путем натяжения части 53 троса, позволяет, в качестве альтернативы, шпильке 46 выходить или оставаться в части 41, при освобождении натяжения части 53 троса, и при этом части 41 и 42 могут соединяться и разъединяться.
Таким образом, для соединения частей 41 и 42 достаточно перевести нижнюю секцию 13 в ее крайнее переднее положение под углом β после сборки шарнирного манипулятора 11, и перевести ее обратно для выполнения разъединения по окончании работ, при этом части 41 и 42 складываются вместе, когда нижняя секция 13 будет переведена по направлению назад после прохода вертикальной плоскости. Шарнирный манипулятор 11 затем может быть демонтирован из отверстия 4. Захват 1 перед этим поднимается и убирается до выполнения разъединения и после перевода нижней секции 13 по направлению назад в расправленном положении частей 41 и 42 для освобождения троса 6.
Изобретение относится к шарнирному манипулятору. Шарнирный манипулятор (11) предназначен для установки его через отверстие (4) в плите (5), которая используется в качестве перекрытия для резервуара (2), и содержит верхнюю секцию (12) и нижнюю секцию (13), соединенные с помощью шарнира (14), подшипник, установленный вокруг отверстия, который содержит закрепленное кольцо, соединенное с перекрытием, и вращающееся кольцо, соединенное с верхней секцией (12), средство управления вращением вращающегося кольца, инструмент (1), подвешенный на нижней секции с помощью троса (6) переменной длины, который проходит из области над перекрытием и манипулятором, а также поверх шкива (15) подвески к свободному концу нижней секции (13). Согласно изобретению, нижняя секция сформирована из шарнирно соединенных частей, а возвратный шкив (16) установлен в месте шарнирного соединения секций, при этом трос проходит под возвратным шкивом (16), и имеется средство управления углом, формируемым секциями. Технический результат заключается в возможности точной установки оборудования для отбора проб, даже вблизи внешнего края резервуара. 6 з.п. ф-лы, 4 ил.

| US 4805650 A, 21.02.1989 | |||
| US 3773616 A, 20.11.1973 | |||
| 0 |
|
SU153108A1 | |
| Гидравлический поворотный кран | 1955 |
|
SU107689A1 |
| Уравновешивающий стреловой подъемник | 1987 |
|
SU1594126A1 |

