Способ относится к области исследования дорожно-транспортных происшествий (ДТП), проводимых экспертами, работниками ГАИ и другими заинтересованными лицами.
Известен «Способ определения факторов дорожно-транспортных происшествий» по патенту №2196697, содержащий алгоритм определения факторов дорожно-транспортных происшествий, заключающийся в составлении схемы ДТП в масштабе с изображением моделей транспортных средств на основе предварительного изучения дорожной обстановки на момент ДТП, весовых и технических характеристик транспортных средств, следов аварии, в котором устанавливают модели транспортных средств в условную точку столкновения, полученную из исходных данных, определяют по характеру повреждений угол столкновения между векторами скоростей моделей транспортных средств, определяют углы, под которыми переместились центры масс транспортных средств после удара относительно векторов их скоростей в момент столкновения, определяют скорости транспортных средств до столкновения, на основе уравнений количества движения системы, в котором размещают модели столкнувшихся транспортных средств поочередно в нескольких точках предполагаемого столкновения, соответственно определяя скорости транспортных средств до столкновения в нескольких разных точках предполагаемого столкновения на основе уравнений количества движения системы, а также определяют на схеме место столкновения как точку, в которой скорости являются минимальными и угол столкновения определяется путем совмещения поврежденных участков транспортных средств, данный способ выбираем прототипом.
Недостатком данной разработки является большая трудоемкость при составлении масштабной схемы ДТП и последующих вычислений, а также отсутствие способа ведения расчета факторов ДТП с использованием видеозаписи.
Задачей разработки данного способа является снижение времени и трудоемкости в процессе расчета скоростей транспортных средств.
Технический результат заключается в повышении точности определения факторов ДТП на основе объективных данных, полученных посредством видеозаписи момента ДТП.
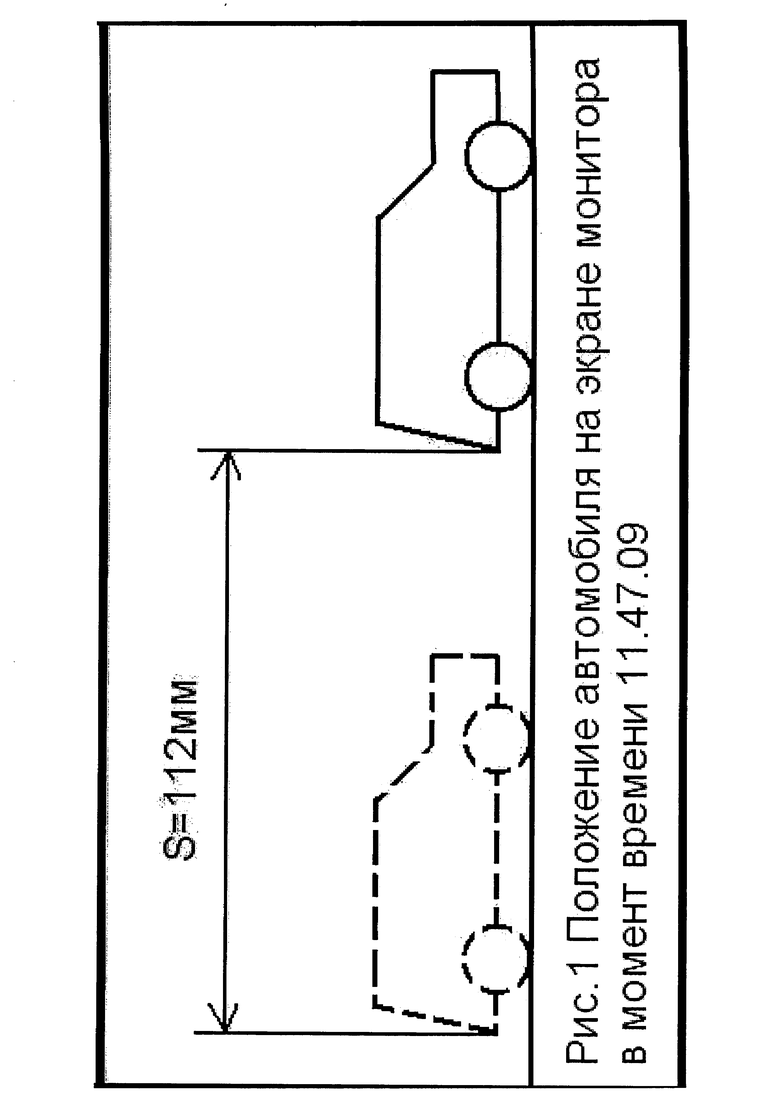
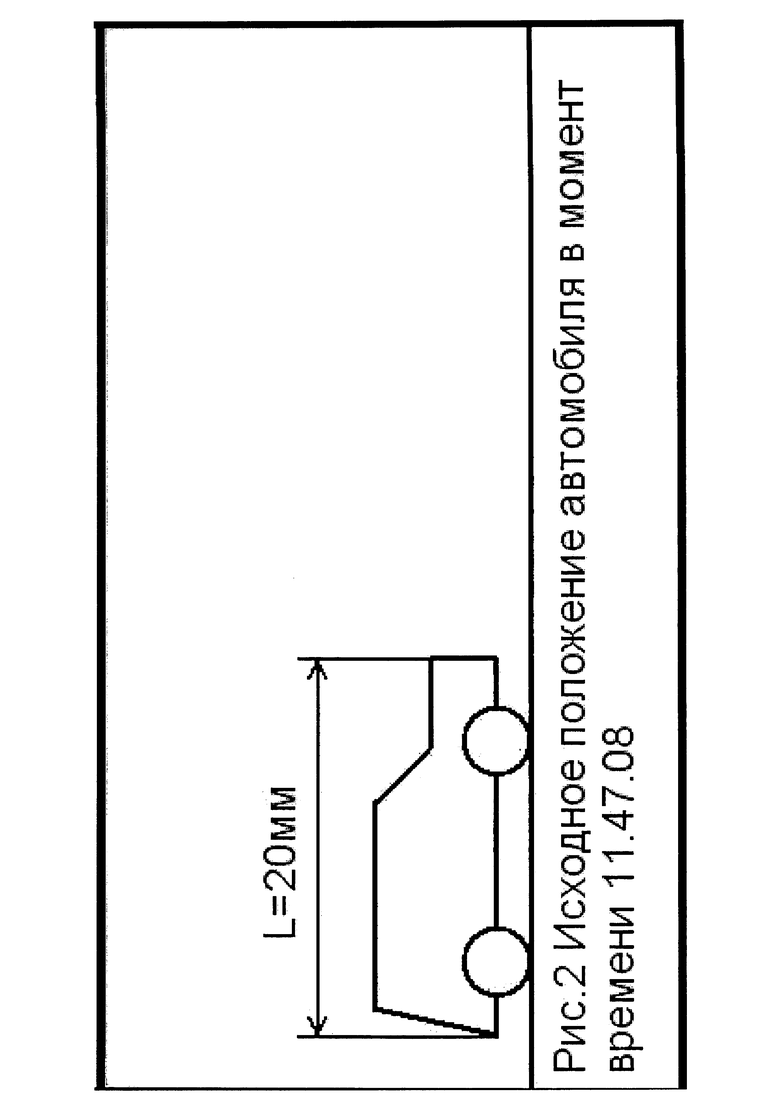
Технический результат достигается путем определения факторов дорожно-транспортных происшествий, в частности определения скорости автомобилей перед столкновением, заключающийся в составлении схемы ДТП в масштабе с изображением моделей транспортных средств на основе предварительного изучения дорожной обстановки на момент ДТП, весовых и технических характеристик транспортных средств, а также расчета точек и углов столкновения и перемещения после столкновения, в котором для расчета скорости автомобиля перед столкновением используется видеозапись с монитора с места ДТП, в расчет берется зафиксированное на видеозаписи перемещение автомобиля за время равное t=1 с, причем за одну секунду автомобиль перемещается на мониторе, например, на расстояние S=112 мм=11,2 см (Рис. 1, на рисунках указано время из реальной ситуации), при этом габаритная длина автомобиля на мониторе равна L=20 мм (Рис. 2), а реальная габаритная длина автомобиля равна La=4,74 м, скорость автомобиля рассчитывается по формуле  , при этом погрешность определяется половиной цены деления измерительного прибора, возможно использование линейки, цена деления которой 1 мм, следовательно, погрешность Δ=±0,5 мм, при этом действительная скорость автомобиля в данном случае получается 95-96 км/ч, причем для расчета скорости можно использовать расстояние между световыми опорами, которое зафиксировано камерой и отображается на мониторе, причем действительное расстояние между опорами всегда можно измерить.
, при этом погрешность определяется половиной цены деления измерительного прибора, возможно использование линейки, цена деления которой 1 мм, следовательно, погрешность Δ=±0,5 мм, при этом действительная скорость автомобиля в данном случае получается 95-96 км/ч, причем для расчета скорости можно использовать расстояние между световыми опорами, которое зафиксировано камерой и отображается на мониторе, причем действительное расстояние между опорами всегда можно измерить.
Последовательность расчета данным методом
Во-первых, измеряем перемещение автомобиля на мониторе за время t=1 с, например S=112 мм=11,2 см, во-вторых, измеряем габаритную длину автомобиля на мониторе, например L=20 мм, затем находим реальную габаритную длину автомобиля, (например в технической документации) La=4,74 м, после этого подставляем найденные значения в формулу  . На мониторе видно, что скорость автомобиля не изменяется, остается постоянной до момента столкновения.
. На мониторе видно, что скорость автомобиля не изменяется, остается постоянной до момента столкновения.
Предлагаемый способ позволяет значительно повысить точность выявления факторов ДТП, а значит и истинных виновников аварий, что подтверждено практической деятельностью. На настоящий момент с помощью данного изобретения исследовано 7 ДТП, дела по которым проходили через суды, не выявлено ни одного случая обжалования решения автотехэксперта.
Для расчета скорости автомобиля перед столкновением используют видеозапись с монитора, выполненную на месте ДТП, в расчет берется зафиксированное на видеозаписи перемещение автомобиля за время равное t=1 с. Используют формулу определения скорости автомобиля V=S*Lp.о/Lo.м*t, где V - скорость автомобиля в реальном времени, S - путь автомобиля, зафиксированный на мониторе при перемещении автомобиля в течение 1 с, Lp.о – реальная габаритная длина автомобиля, зафиксированного на мониторе, или реальное расстояние между световыми опорами, зафиксированное на мониторе, Lo.м – габаритная длина того же автомобиля, измеренная на мониторе, или расстояние между теми же световыми опорами на мониторе соответственно, t - промежуток времени фиксации пути автомобиля на мониторе равный 1 с. Повышается точность определения факторов ДТП. 2 ил.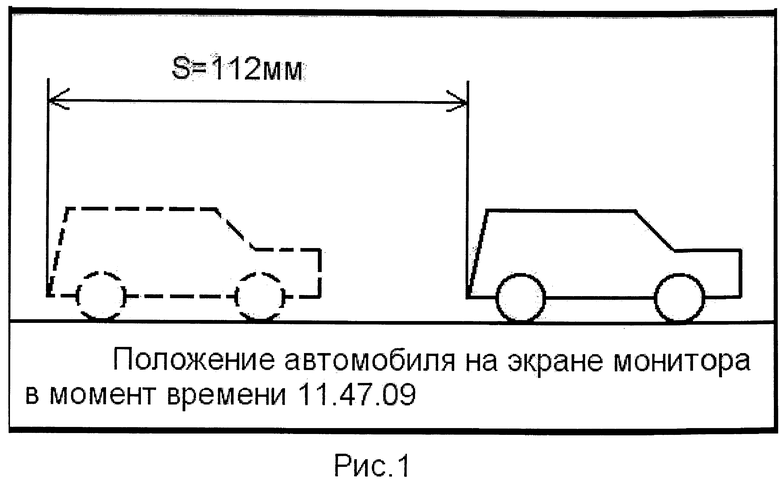
Способ определения факторов дорожно-транспортных происшествий (ДТП), в частности определение скорости автомобилей перед столкновением, заключающийся в составлении схемы ДТП в масштабе с изображением моделей транспортных средств на основе предварительного изучения дорожной обстановки на момент ДТП, весовых и технических характеристик транспортных средств, а также расчета точек и углов столкновения и перемещения после столкновения, отличающийся тем, что для расчета скорости автомобиля перед столкновением используют видеозапись с монитора, выполненную на месте ДТП, в расчет берется зафиксированное на видеозаписи перемещение автомобиля за время равное t=1 с, причем для определения скорости автомобиля используют формулу расчета:
V=S*Lp.о/Lo.м*t,
где V - скорость автомобиля в реальном времени,
S - путь автомобиля, зафиксированный на мониторе при перемещении автомобиля в течение 1 с,
Lp.о – реальная габаритная длина автомобиля, зафиксированного на мониторе, или реальное расстояние между световыми опорами, зафиксированное на мониторе,
Lo.м – габаритная длина того же автомобиля, измеренная на мониторе, или расстояние между теми же световыми опорами на мониторе соответственно,
t - промежуток времени фиксации пути автомобиля на мониторе равный 1 с.
| СПОСОБ ОПРЕДЕЛЕНИЯ ФАКТОРОВ ДОРОЖНО-ТРАНСПОРТНЫХ ПРОИСШЕСТВИЙ | 2001 |
|
RU2196697C2 |
| Экспертиза по определению скорости авто по видеозаписи (Независимый форум судебных экспертов) [он-лайн], 2012-2015 | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| Устройство для избирательного управления с одного конца однопроводной линии несколькими реле | 1918 |
|
SU981A1 |
| Перышкин А.В | |||
| Курс физики | |||
| - М.: Просвещение, 1967, стр.14 | |||
| LOGESH VASU | |||
| AN EFFECTIVE STEP TO REAL-TIME IMPLEMENTATION OF ACCIDENT DETECTION SYSTEM USING IMAGE PROCESSING | |||
| Submitted to the Faculty of the Graduate College of the Oklahoma State University in partial fulfillment of the requirements for the Degree of MASTER OF SCIENCE, December, 2010 | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| Съемная крыша для ульев | 1927 |
|
SU11244A1 |
| Яворский Б | |||
| М., Селезнев Ю | |||
| А | |||
| Справочное руководство по физике для поступающих в вузы и для самообразования | |||
| - М.: Наука, 1989, стр.68. | |||

