Область техники, к которой относится изобретение
Изобретение относится к области разработки автомобильных систем, предназначенных для определения момента аварии и степени тяжести аварии в автоматическом режиме. Данные системы могут использоваться при построении систем вызова экстренных оперативных служб и других систем, предназначенных для обеспечения безопасности на транспорте.
Изобретение применяется для проверки эффективности функционирования автомобильной системы на этапе ее разработки, устанавливаемой на транспортное средство (ТС) в конфигурации дополнительного оборудования для определения момента и степени тяжести аварии при дорожно-транспортном происшествии (ДТП).
Уровень техники
Известны автомобильные системы, предназначенные для определения момента и степени тяжести аварии в автоматическом режиме, устанавливаемые на ТС:
- в конфигурации штатного оборудования, при которой установка системы производится на сборочной линии производителя ТС;
- в конфигурации дополнительного оборудования, при которой установка системы производится на сервисных (установочных) станциях, уполномоченных установленным порядком на производство указанных работ, либо на площадке производителя ТС или дилера производителя ТС после выпуска (изготовления) ТС на основном сборочном производстве.
Перед разработчиками автомобильных систем, предназначенных для определения момента и степени тяжести аварии при ДТП, стоит немаловажная задача - разработка способа определения момента и степени тяжести аварии и проведение испытаний созданных автомобильных систем в части проверки эффективности их функционирования.
В настоящее время как в России, так и за рубежом отсутствуют единые стандартизованные критерии, характеризующие события, возникающие в процессе эксплуатации ТС, приводящие к высокой вероятности существенного ущерба жизни и здоровью людей, находящихся в кабине ТС при ДТП. Данные стандарты предполагают использование натурных испытаний.
За рубежом были разработаны серии стандартов, регламентирующих проведение натурных испытаний автомобиля, с целью оценки его безопасности как для водителя и пассажиров, так и для пешеходов. К ним относятся:
- Новая программа оценки автомобилей в Соединенных Штатах (United States New Car Assessment Program - USNCAP);
- Новая программа оценки автомобилей в Европе (European New Car Assessment Program-EUNCAP);
- Новая программа оценки автомобилей в Японии (Japan New Car Assessment Program-JNCAP);
- Федеральные стандарты безопасности ТС (Federal Motor VehicleSafety Standards);
- Тесты Страхового института дорожной безопасности (The Insurance Institute for Highway Safety, IIHS).
В соответствии со стандартом EUNCAP рейтинг безопасности ТС устанавливается по итогам проведения натурных испытаний, предназначенных для выяснения поведения ТС в части обеспечения:
- защиты взрослых пассажиров;
- защиты детей;
- безопасности пешеходов;
- активной безопасности автомобиля.
Для подсчета рейтинга безопасности EUNCAP требуется провести и обработать результаты следующих натурных экспериментов:
- фронтальный краш-тест: 64 км/ч, перекрытие - 40%, деформируемый барьер;
- боковой краш-тест: 50 км/ч, деформируемый барьер;
- имитация наезда на пешехода на скорости 40 км/ч. При «обстреле» бампера, капота и лобового стекла муляжами головы и ног оцениваются перегрузки «коленей», изгибающие моменты «бедер» и критерий травмирования «головы» - HIC;
- удар в столб на скорости 29 км/ч (только для машин со специальными подушками для защиты головы);
Для подсчета рейтинга в соответствии с методикой IIHS требуется провести и обработать результаты следующих натурных экспериментов:
- фронтальный краш-тест: 64 км/ч, под углом, деформируемый барьер;
- боковой краш-тест: 50 км/ч, деформируемый барьер;
- удар в заднюю часть автомобиля: 32 км/ч;
- испытания бамперов: передние и задние столкновения по всей ширине на скорости 9.6 км/ч, а также передние и задние столкновения угловой части на скорости 4.8 км/ч;
- испытания прочности крыши.
Для проведения испытаний в соответствии с данными стандартами требуется закупка ТС соответствующей категории, антропоморфных манекенов (Hybrid III, Crabi - для фронтальных краш-тестов, ES-2, SID-II - для боковых краш-тестов, BioRID - для задних столкновений), позволяющих с высокой степенью точности определить поведение тела человека при столкновении и оценить травмы и степени их тяжести. После проведения испытаний фронтальный краш-тест, боковой краш-тест, удар в столб состояние ТС после проведения испытания не позволяет использовать данное ТС для проведения последующих испытаний.
Применение моделей манекенов позволяет с точностью определить вероятность получения травм и их расположение на теле человека. В том числе для оценки возможной травмы, вызванной последующими соударениями. К недостаткам можно отнести тот факт, что анализ проводится на манекене, не отражающем комплекцию конкретного человека. Чаще всего антропоморфный манекен обладает некими среднестатистическими характеристиками (рост, вес). Положение манекена строго регламентировано правилами, однако в реальной ситуации пассажир может располагаться в кресле ТС иначе, и в этом случае движение тела и точки столкновения будут другими. Несмотря на это манекены широко используются при проведении испытаний, и их характеристики постоянно улучшаются, позволяя моделировать работу мышц, связок, выполнять оценку травм внутренних органов.
Кроме того, при проведении испытаний, в соответствии с вышеназванными стандартами, скорость ТС и прочие параметры проведения испытаний остаются неизменными, что ограничивает возможности по определению эффективности функционирования системы для определения момента и степени тяжести аварии при изменении обстоятельств ДТП, включая изменение скорости и траектории движения ТС перед ДТП; угла столкновения ТС с неподвижным препятствием; угла столкновения ТС с другими ТС, участвующими в ДТП; скорости других ТС, участвующих в ДТП; степени перекрытия при столкновении нескольких ТС, участвующих в ДТП, и других параметров.
Все эти стандарты требуют проведения дорогостоящих натурных испытаний с привлечением сертифицированных организаций, что является существенным ограничением при решении задачи проверки эффективности функционирования системы, устанавливаемой на ТС в конфигурации дополнительного оборудования, для определения момента и степени тяжести аварии.
Сущность изобретения
Задача изобретения - определение эффективности функционирования автомобильной системы на этапе ее разработки, устанавливаемой на ТС в конфигурации дополнительного оборудования, для определения момента и степени тяжести аварии.
Поставленная задача достигается посредством создания компьютерной модели ТС, обеспечивающей необходимый уровень достоверности, и проведения численного моделирования процессов, происходящих в ТС при различных сценариях аварии (ДТП), различных скоростях ТС, траекториях движения ТС, угла столкновения ТС с неподвижными препятствиями, угла столкновения ТС с другими ТС, участвующими в ДТП; скорости других ТС, участвующих в ДТП; степени перекрытия при столкновении нескольких ТС и др.
Изобретение позволяет сократить финансовые затраты, направляемые на проведение испытаний, не менее чем в 5 раз за счет использования средств численного моделирования и отказа от необходимости проведения натурных испытаний на этапе разработки с привлечением сертифицированных организаций.
Предложенный способ рекомендуется использовать на этапе разработки автомобильных систем, предназначенных для определения момента и степени тяжести аварии, устанавливаемых на ТС в конфигурации дополнительного оборудования, с последующим проведением натурных испытаний на завершающих этапах в целях подтверждения результатов проведенного численного моделирования.
Изобретение осуществляется последовательным выполнением следующих процедур:
1. Разработка компьютерной модели ТС;
2. Определение момента и степени тяжести аварии с учетом технических характеристик и способа установки системы, устанавливаемой на ТС в конфигурации дополнительного оборудования для определения момента и степени тяжести аварии;
3. Расчет оценки степени опасности ускорения для лиц, находящихся в кабине ТС;
4. Определение средств численного моделирования и подготовка среды численного моделирования для проведения моделирования в соответствии с различными сценариями ДТП;
5. Разработка программы и методики проведения испытаний по проверке эффективности функционирования автомобильной системы;
6. Проведение численного моделирования;
7. Анализ результатов численного моделирования.
Краткое описание чертежей
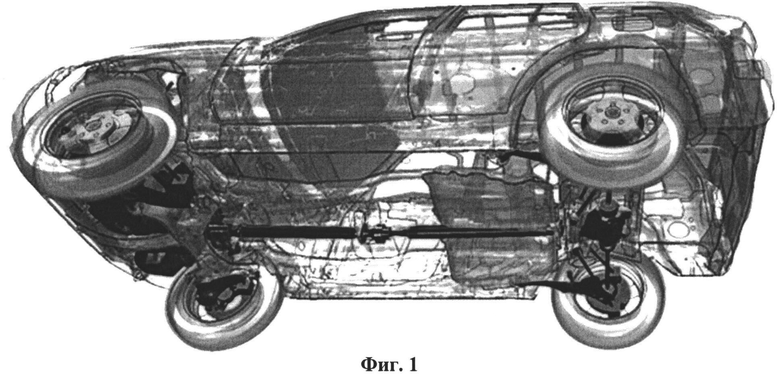
Фиг.1 - изображение пространственно-геометрической модели ТС с помощью компьютерного моделирования;
Фиг.2 - изображение расположения толщин ТС меньше 0.8 мм;
Фиг.3 - изображение расположения толщин ТС от 0.8 мм до 1.5 мм;
Фиг.4 - изображение расположения толщин ТС от 1.51 мм до 2.5 мм;
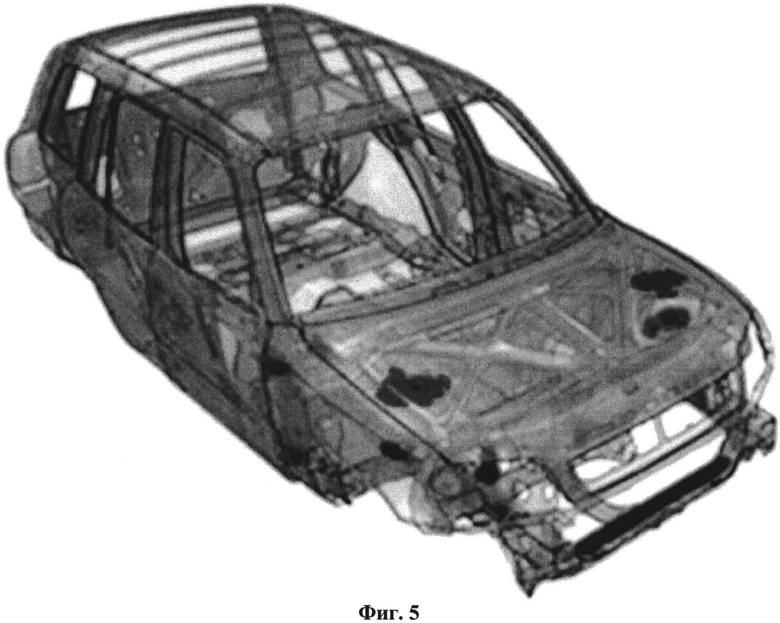
Фиг.5 - изображение расположения толщин ТС больше 2.5 мм;
Фиг.6 - схема места установки датчика определения события;
Фиг.7 - график кривая Уэйн-Стейта, использующий в своей основе информацию о характере изменения ускорения со временем в различных точках тела человека, находящегося внутри ТС в момент аварии;
Фиг.8 - схематическое изображение проведения оценки теоретической скорости удара головы.
Реализация изобретения
Разработка компьютерной модели ТС должна проводиться при условии выполнения требования обеспечения достаточной степени соответствия результатов численного моделирования сценария ДТП результатам соответствующих натурных испытаний, проводящихся в контролируемых условиях в соответствии с установленной программой и методикой проведения натурных испытаний.
Большая часть кузовных элементов автомобиля производится из сталей различных марок методом штампования или для особенно важных деталей, где требуется высокая прочность, методом гидроформования. Сплошность и состав конструкционного элемента, изготовленного из стали по данным технологиям, позволяет рассматривать материал как однородную изотропную среду и использовать для описания напряженно-деформированного поведения стальных конструкций, подверженных большим пластическим деформациям, упругопластические модели материалов с изотропным упрочнением с учетом зависимости от скоростей деформации.
Разработку модели ТС проводят в соответствии со стандартами Федерального управления автомобильных дорог (Federal Highway Administration - FHWA), Национальным центром исследования столкновения автомобилей (National Crash Analysis Center - NCAC), Национального управления безопасностью дорожного движения (the National Highway Traffic Safety Administration - NHTSA) и университета им. Джорджа Вашингтона, США (The George Washington University - GWU, USA).
В целях обеспечения полноты и всесторонности численного моделирования обеспечивается:
- максимальная детализация моделей ТС;
- выполняется верификация моделей для достижения наиболее достоверного подобия прототипов и реальных ТС, участвовавших в виртуальных тестах.
При разработке модели ТС учитываются:
- характеристики используемых материалов с учетом упругопластического поведения материалов и разрушения;
- характеристики соединений листовых деталей кузова с применением математической модели сварки с заданным пределом прочности;
- характеристики соединения элементов двигателя, системы тормозов, подвесок и некоторых элементов кузова (двери, капот) с применением математической модели болтового соединения без учета разрушения;
- давление в шинах ТС и характеристики сцепления шин ТС с дорожным покрытием.
Для реализации изобретения необходимо создать пространственную геометрическую модель ТС (Фиг.1), например, со следующими характеристиками:
- вес ТС 1220 кг (полный вес 1500 кг);
- основные размеры: высота 1660 мм, ширина 1695 мм, длина 4115 мм, база 2410 мм;
- дорожный просвет 200 мм;
- колея передних / задних колес, мм - 1460/1465;
- расположение двигателя - спереди, поперечно;
- толщины листового металла деталей кузова - от 0.5 до 2.5 мм (толщины металла основных деталей кузова выбраны в соответствии со значениями толщин штампованных деталей кузова, принятых при серийном производстве ТС заводом-изготовителем) (на фиг.2, фиг.3, фиг.4, фиг.5 представлено расположение толщин основных элементов кузова):
- передняя подвеска - амортизационная стойка, треугольный поперечный рычаг, поперечный стабилизатор;
- задняя подвеска - продольный рычаг, поперечный рычаг, поперечный стабилизатор. Постоянный полный привод;
- тормозные механизмы: передние - дисковые вентилируемые, задние - барабанные;
- модель учитывает дверные брусья безопасности, установленные на автомобиль.
- размер шин: 215/70 R16 (стандартная комплектация).
Основные характеристики созданной компьютерной модели ТС представлены в таблице 1.
Определение момента и степени тяжести аварии происходит при условии использования трехосевого датчика ускорения в качестве датчика определения события ДТП.
Техническими характеристиками датчика являются точность, разрешение при измерении значения ускорения по трем осям (х, у, z) и частота обновления информации.
При условии использования другого датчика(ов) в качестве датчика определения события ДТП технические характеристики датчика определяются исходя из конструктивной реализации датчика.
На фигуре 6 представлен чертеж ТС (вид сверху). В случае использования датчика ускорения в качестве датчика определения события ДТП, данный датчик рекомендуется устанавливать вдоль продольной оси ТС (Y=0) на наиболее усиленное место панели пола, вдали от деформируемых деталей кузова ТС. Данное расположение обеспечивает применение одинаковых критериев при ударе в правую и левую стороны ТС, что значительно упрощает настройку автомобильной системы. Рекомендуемые места установки в ТС датчика обозначены точками 1, 2, 3 (Фиг.6).
При выборе места установки датчика определения события ДТП необходимо обеспечить достаточное пространство вокруг датчика, чтобы значительные деформации кузовных элементов не повредили датчик и не оказали негативное влияние на его работоспособность.
Определение момента и степени тяжести аварии предполагает возможность исполнения данной процедуры совместно с проведением численного моделирования процессов, происходящих в ТС при ДТП, с использованием информации, поступающей из системы, обеспечивающей численное моделирование, в качестве входной информации.
Расчет оценки степени опасности ускорения для лиц, находящихся в кабине ТС, основывается на анализе травмоопасности пассажиров и водителя, который проводится по двум основным типам критериев.
К первому типу относятся критерии, использующие в своей основе информацию о характере изменения ускорения со временем в различных точках тела человека, находящегося внутри ТС в момент аварии. По кривой ускорения определяются перегрузки, которые могут привести к переломам костей, а также иным повреждениям, вызванным резким ускорением тела. Критерии первого типа базируются на кривой Уэйн-Стейта, описывающей зависимость порогового значения перегрузки, при которой не наступает сотрясения мозга, от длительности воздействия.
На Фиг.7 показан пример, если перегрузка в 80g (g - ускорение свободного падения) действовала на человека в течение 3 мс, то, отложив 3 мс на оси абсцисс кривой Уэйн-Стейта и 80g - на оси ординат, получается точка, лежащая ниже пороговой кривой. Таким образом, данное воздействие можно считать безопасным (в соответствии с Правилами пассивной безопасности №12 и 21 ЕЭК ООН).
Анализ травмоопасности частей тела человека необходимо проводить по следующим критериям:
- Критерий травмирования головы (Head Injury Criteria - HIC);
- Критерий травмирования шеи (Neck Injury Criterion - NIC);
- Степень травмирования груди (Thorax Trauma Index - TTI);
- Степень тяжести травмы (Severity Index - SI) (определяет степень опасности получения травмы груди на основании зависимости Уэйн-Стейта).
Общепринятой методикой измерения вероятности получения травмы от перегрузки при ударе головой является Критерий травмирования головы (Head Injury Criteria - HIC). Критерий травмирования головы - это максимальный интеграл ускорения (замедления), взятый на отрезке не более 36 мс, на котором ускорение достигает своего пикового значения с определенным коэффициентом. Вычисление значения Критерий травмирования головы производится на интервале времени, включающем первый пик ускорения. Если на графике присутствует второй пик ускорений, который возможен из-за контакта головы с элементами автомобиля, значение «Критерий травмирования головы» должно быть рассчитано и для этого участка графика.
Второй тип критериев требует применения специальных датчиков, измеряющих смещения, усилия и моменты в различных точках манекенов, используемых при натурных испытаниях ТС. Далее по величине наибольшего силового воздействия определяется возможность перелома костей, разрыва связок или повреждения мышц. К таким критериям относятся:
- Нормированный критерий травмирования шеи (Normalized Neck Injury Criteria - Nij);
- Величина момента относительно затылочной части (Total Moment about Occipital condyle - MOC);
- Величина момента относительно нижней части шеи (Total Moment - MTO);
- Скорость сдавливания груди (Velocity of Compression - VC);
- Критерий степени деформирования груди (Thorax Performance Criterion - THPC);
- Величина сдавливания грудной клетки (Thoracic Compression Criterion - ThC);
- Величина смещения ребер (Rib Deflection Criterion - RDC).
В настоящем способе используются математические модели манекенов, которые полностью соответствуют их физическим аналогам, и также сертифицируются.
В реализации изобретения предусматривается возможность использования упрощенного подхода для оценки событий, возникающих в процессе эксплуатации ТС, приводящих к высокой вероятности существенного ущерба жизни и здоровью людей, находящихся в кабине ТС, на основе использования критериев ASI (Acceleration Severity Index - индекс степени опасности ускорения) и THIV (Theoretical Head Impact Velocity - теоретическая скорость удара головы). Данные подходы рассматривают поведение тела человека как свободно движущийся объект с начальной скоростью и ускорением, равным скорости и ускорению ТС до момента столкновения.
Индекс степени опасности ускорения ASI предназначен для оценки измерения травмоопасности человека, сидящего в машине вблизи точки удара, при возможном ударе о внутренние элементы автомобиля и является функцией времени, рассчитанной по

где:






Уравнение 1 является самым простым из возможных уравнений взаимодействия трех переменных х, у и z. Если любые два компонента ускорения ТС равны нулю, ASI достигает своего предельного значения 1, в случае если третий компонент ускорения достигает своего предельного значения. Если два или три компонента не равны нулю, ASI может равняться 1, если отдельные компоненты значительно ниже предельных значений. Предельные ускорения интерпретируют как значения, ниже которых риск травмоопасности пассажира очень невелик (травмы небольшие, если вообще имеются). В уравнении (1) ASI является безразмерной величиной, это скалярная функция времени, и в общем для рассматриваемой точки ТС, обладает только положительными значениями.
Уравнение 2 является фильтром низких частот, который учитывает тот факт, что ускорения ТС могут сообщаться телу пассажира через относительно мягкие контакты, которые не могут передавать самые высокие частоты:

Для пассажиров, пристегнутых ремнями безопасности, как правило, используются следующие предельные ускорения:



где:
g=9,81 м/с2 - отсчетная величина для ускорения;
Таким образом, можно сделать вывод, что чем больше ASI превосходит единицу, тем больше риск для пассажира в данной точке получить травму. Поэтому максимальное значение, достигаемое ASI во время столкновения, принимается как отдельное измерение степени опасности, или по

Концепция оценки безопасности, основанная на теоретической скорости удара головы (Theoretical Head Impact Velocity), применяется для оценки степени удара пассажира головой, для автомобилей, оснащенных системой пассивной безопасности в виде ремней безопасности, при ДТП. В рамках этой концепции пассажир (голова пассажира) рассматривается как свободно движущийся объект, который так же, как автомобиль, меняет свою скорость при столкновении с барьером или препятствием, продолжая движение до тех пор, пока не столкнется с какой-либо поверхностью внутри автомобиля.
Модуль вектора скорости теоретической головы используется для оценки степени жесткости удара ТС о препятствие. При этом подразумевается, что после соударения голова остается в контакте с поверхностью в течение остального времени. И обладает такими же характеристиками ускорения, как и само ТС в течение остального времени контактного взаимодействия с барьером.
В начале контакта ТС с барьером, как ТС, так и теоретическая голова имеют одинаковую горизонтальную скорость V0, при этом движение ТС исключительно поступательное. Предполагается, что во время удара ТС двигается только в горизонтальной плоскости, так как высокие уровни уклона, крена или вертикального движения не столь существенны, если машина не переворачивается.
На Фиг.8 (1 - начало координат, 2 - положение теоретической головы) показана система координат ТС - 1ху, где х - продольная ось, у - поперечная ось. Начало координат (на Фиг.8 обозначено 1) - это точка ТС, близкая к, но не обязательно совпадающая с центром тяжести. Ускорения точки 1 будем использовать для анализа поведения ТС при оценке теоретической скорости удара головы.
Пример проведения оценки теоретической скорости удара головы (Фиг.8 точка 2)
- пусть 



- система координат земли OXY, горизонтальная, ось Х совмещена со скоростью V0, а начало координат 0 совпадает с исходным положением базовой точки 1 ТС. Xc(t) и Yc(t) - земные координаты исходной точки ТС С, а Хb(1) и Yb(t) - земные координаты теоретической головы (2).
Используя допущения и гипотезы, рассмотренные выше, движение ТС и теоретической головы вычисляется следующим образом.
Условиями для расчета движения ТС в начальный момент времени t=0 являются:

При проведении экспериментов угол рыскания - ψ может быть измерен из записей соответствующей потолочной камеры, или путем вычисления интеграла скорости рыскания ψ, или другим подходящим способом. Например, при использовании датчика, связанного с системой координат ТС, угол может быть измерен с помощью дополнительного датчика, совмещенного с гироскопом.
Скорость и положение ТС вычисляются интегрированием по


Исходными условиями для расчета движения теоретической головы относительно земли в начальный момент времени t=0 являются:

Если теоретическая голова продолжает равномерное движение, то применяется
Скорость теоретической головы относительно ТС рассчитывается по

Координаты теоретической головы относительно системы координат ТС вычисляются при помощи

На Фиг.9 показано положение теоретической головы до удара (2) об одну из трех условных поверхностей внутри ТС. Предполагается, что условные поверхности удара внутри ТС плоские и расположены перпендикулярно осям ТС х и у.
Расстояния до таких поверхностей от исходного положения головы (расстояния до удара): вперед Dx и вбок в обе стороны Dy. На Фиг.9 показан удар головы о левую внутреннюю сторону ТС (3).
Время свободного движения теоретической головы - это самое короткое время Т, за которое удовлетворено одно из трех следующих:

где:
Dx=0,6 м; Dy=0,3 м - рекомендуемые значения расстояний до удара.
Заметим, что угол рысканья ψ необходим для преобразования результатов из системы координат, связанных с землей, в систему координат, связанную с ТС. При установке трехосевого датчика ускорений на ТС согласно Уравнениям 8 показания датчика рыскания не требуются.
Окончательно, скорость удара теоретической головы является относительной скоростью за время Т и рассчитывается при помощи
Одним из основных преимуществ приведенных выше критериев индекса степени опасности ускорения (ASI), теоретической скорости удара головы (THIV) является их независимость от расположения пассажиров и водителя, а также использование информации только о движении и воздействиях испытываемых ТС. Это позволяет выполнить оценку возникновения аварийной ситуации и степени тяжести потенциальных травм людей, находящихся в кабине ТС, с использованием современных датчиков, измеряющих скорости и ускорение в системе координат, связанной с ТС.
Расчет оценки степени опасности ускорения для лиц, находящихся в кабине ТС, проводится исходя из требований предметной области и предполагает возможность исполнения соответствующего способа обработки данных совместно с проведением численного моделирования процессов, происходящих в ТС при ДТП, с использованием информации, поступающей из системы, обеспечивающей численное моделирование, в качестве входной информации.
Разница в реализации способа обработки данных, поступающих из системы, обеспечивающей численное моделирование, в случае реализации способа определения момента и степени тяжести аварии и в случае реализации метода расчета оценки степени опасности ускорения для лиц, находящихся в кабине ТС, состоит в том, что в первом случае используется способ, оптимизированный для применения на целевой автомобильной программно-аппаратной платформе (ограниченный объем оперативной памяти и ограниченные вычислительные ресурсы), а во втором случае могут использоваться вычислительные ресурсы существенно большей мощности, использование которых необходимо для обеспечения выполнения численного моделирования.
В качестве целевой автомобильной аппаратной платформы следует рассматривать аппаратную платформу класса ARM7 или выше, с не менее 137 Кбайт свободной памяти ПЗУ и 100 Кбайтами памяти ОЗУ.
В качестве вычислительного ресурса, необходимого для обеспечения выполнения численного моделирования, следует рассматривать многопроцессорные системы, построенные на основе процессоров класса Intel Xeon X5570 2.93 GHz или выше с объемом дискового пространства от 300 Gb и объемом оперативной памяти от 200 Gb.
При определении средств численного моделирования учитывается, что рассматриваемая задача обладает:
- физическими нелинейностями, за счет учета упругопластических свойств материалов модели кузова ТС;
- контактными нелинейностями, так как рассматривается многочисленное контактное взаимодействие моделированием процессов проскальзывания, прилипания, выход областей из контактного взаимодействия и повторного контактного взаимодействия.
При реализации изобретения использовалась система конечно-элементного анализа ABAQUS. ABAQUS - программный комплекс мирового уровня в области конечно-элементных прочностных расчетов, с помощью которого можно получать точные и достоверные решения для самых сложных линейных и нелинейных инженерных проблем. Программный комплекс ABAQUS разработан по модульному принципу. Он состоит из двух основных модулей - решателей ABAQUS/Standard и ABAQUS/Explicit, пре-постпроцессора ABAQUS/CAE и модулей, учитывающих особенности различных дисциплин. Программный комплекс Simulia Abaqus (ABAQUS 6.9. Год выпуска: 2009. Версия: 6.9. Разработчик: Dassault Systems) представляет собой полностью параллельный код и может использоваться на всех вычислительных платформах, включая многоядерные вычислительные системы и кластеры.
При реализации изобретения возможно использование других систем конечно-элементного анализа, если данные системы обеспечивают выполнение численного моделирования с необходимой степенью достоверности.
При проведении численного моделирования моделируется ударное взаимодействие между отдельными ТС и между ТС и элементами дорожной инфраструктуры, которое является динамическим и быстротекущим, что требует применения явных методов решения уравнения динамики. Явными методами решения уравнения динамики называют методы, не связанные с решением систем уравнений, но использующие рекуррентные соотношения, которые выражают перемещения, скорости и ускорения на данном шаге через их значения на предшествующих шагах.
Подготовка среды численного моделирования для проведения моделирования в соответствии с определенными сценариями ДТП обеспечивает возможность проведения численного моделирования с учетом всех определенных сценариев ДТП; возможность автоматизации процесса проведения численного моделирования, сбора и обработки результатов численного моделирования.
С учетом технических особенностей выбранных средств численного моделирования разрабатывается программа и методика проведения испытаний, которая должна применяться для выполнения следующих процедур при проведении и анализе результатов численного моделирования.
Программа и методика проведения испытаний должна содержать:
- перечень технических характеристик и функциональных свойств, подлежащих подтверждению при испытаниях;
- условия, порядок и методы проведения испытаний и обработки результатов;
- критерии приемки по результатам испытаний;
- описание тестов (методов, методик испытаний).
Набор тестов, выполняемых на этапе автономных предварительных испытаний, должен обеспечивать:
- полную проверку порядка действий по определению события и тяжести ДТП;
- проверку надежности и устойчивости функционирования порядка действий по определению события и тяжести ДТП.
Численное моделирование проводится в соответствии с программой и методикой проведения испытаний.
Результаты численного моделирования должны протоколироваться в целях обеспечения возможности последующего проведения обработки и анализа результатов численного моделирования.
В таблице 2 и таблице 3 представлены расчетные случаи для фронтального столкновения, бокового столкновения и удара сзади ТС в случае аварии, обработанные при проведении компьютерного моделирования в рамках применения способа.
Анализ результатов численного моделирования проводится в соответствии с установленной программой и методикой проведения испытаний и позволяет сделать вывод о том, соответствуют ли выходные данные, полученные при исполнении способа определения момента и степени тяжести аварии, выходным данным, полученным при расчете оценки степени опасности ускорения для лиц, находящихся в кабине ТС при проведении испытаний в соответствии с определенными сценариями ДТП.
В Таблице 4 представлено краткое описание процесса реализации изобретения для конкретных ТС (Toyota RAV4 и BMW 1 серии)



Изобретение применяется для проверки эффективности функционирования на этапе ее разработки автомобильной системы, устанавливаемой на транспортное средство в конфигурации дополнительного оборудования для определения момента и степени тяжести аварии при дорожно-транспортном происшествии. Определяют эффективность функционирования автомобильной системы посредством создания компьютерной модели транспортного средства, обеспечивающей необходимый уровень достоверности, и проведения численного моделирования процессов, происходящих в транспортном средстве при различных сценариях аварии. Обеспечивается проверка эффективности функционирования системы на этапе разработки без натурных испытаний. 14 з.п. ф-лы, 4 табл., 8 ил. 
1. Способ проверки эффективности функционирования автомобильной системы на этапе разработки, устанавливаемой на транспортное средство в конфигурации дополнительного оборудования для определения момента и степени тяжести аварии, включающий в себя
процедуру разработки компьютерной модели транспортного средства;
процедуру определения момента и степени тяжести аварии с учетом технических характеристик и способа установки системы, устанавливаемой на транспортное средство в конфигурации дополнительного оборудования для определения момента и степени тяжести аварии;
процедуру расчета оценки степени опасности ускорения для лиц, находящихся в кабине транспортного средства;
процедуру определения средств числового моделирования и подготовку среды численного моделирования для проведения моделирования в соответствии с различными сценариями ДТП;
процедуру разработки программы и методики проведения испытаний по проверке эффективности функционирования автомобильной системы;
процедуру проведения численного моделирования;
процедуру анализа результатов численного моделирования.
2. Способ по п.1, в котором процедуру разработки компьютерной модели транспортного средства производят с максимальной детализацией.
3. Способ по п.1, в котором определение момента и степени тяжести аварии происходит при условии использования трехосевого датчика ускорения и установки его вдоль продольной оси транспортного средства.
4. Способ по п.3, в котором определение момента и степени тяжести аварии предполагает возможность исполнения данной процедуры совместно с проведением численного моделирования.
5. Способ по п.1, в котором расчет оценки степени опасности ускорения для лиц, находящихся в кабине транспортного средства, основывается на анализе травмоопасности частей тела пассажиров и водителя.
6. Способ по п.5, в котором расчет оценки степени опасности ускорения для лиц, находящихся в кабине транспортного средства, производят на основе информации о характере изменения ускорения со временем в различных точках тела человека, находящегося внутри транспортного средства в момент аварии.
7. Способ по п.5, в котором анализ травмоопасности частей тела пассажиров и водителя проводят по критериям травмирования головы, шеи, степени травмирования груди, степени тяжести травмы.
8. Способ по п.5, в котором расчет оценки степени опасности ускорения для лиц, находящихся в кабине транспортного средства, производят с помощью математической модели манекена, измеряя смещения, усилия и моменты в различных точках манекена.
9. Способ по п.5, в котором расчет оценки степени опасности ускорения для лиц, находящихся в кабине транспортного средства, производят при помощи использования индекса степени опасности ускорения и теоретической скорости удара головы.
10. Способ по п.5, в котором в качестве вычислительного ресурса, необходимого для обеспечения выполнения численного моделирования, применяются многопроцессорные системы, построенные на основе процессоров класса Intel Xeon X5570 2.93 GHz или выше с объемом дискового пространства от 300 Gb и объемом оперативной памяти от 200 Gb.
11. Способ по п.1, в котором при проведении процедуры численного моделирования моделируют ударное взаимодействие между отдельными транспортными средствами и между транспортными средствами и элементами дорожной инфраструктуры.
12. Способ по п.10, в котором для проведения численного моделирования применяют различные сценарии ДТП, скорости транспортных средств, траектории движения транспортных средств, углы столкновения транспортных средств с неподвижными препятствиями, углы столкновения транспортных средств с другими транспортными средствами, участвующими в ДТП; скорости других транспортных средств, участвующих в ДТП; степени перекрытия при столкновении нескольких транспортных средств.
13. Способ по п.10, в котором процедура численного моделирования, сбора и обработки результатов моделирования автоматизирована.
14. Способ по п.1, в котором программа и методика проведения испытаний по проверке эффективности функционирования автомобильной системы проводится на основании перечня технических характеристик и функциональных свойств, подлежащих подтверждению при испытаниях; условий, порядка и методов проведения испытаний и обработки результатов.
15. Способ по п.1, в котором анализ результатов численного моделирования проводят для определения соответствия выходных данных, полученных при определении момента и степени тяжести аварии, выходным данным, полученным при расчете оценки степени опасности ускорения для лиц, находящихся в кабине транспортного средства.
| US 6195625 B1, 27.02.2001 | |||
| US 20070073526 A1, 15.03.2011 | |||
| US 6522998 B1, 18.02.2003 | |||
| CN 101604348 A, 16.12.2009 | |||
| УСТРОЙСТВО ЗАМЕРА И ФИКСАЦИИ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2102263C1 |

