Предлагаемые изобретения относятся к области исследования дорожно-транспортных происшествий и предназначены для построения пространственной траектории движения транспортного средства (ТС) по зафиксированным данным.
Анализ причин автодорожного происшествия средствами, имеющимися у служб ГИБДД-ГАИ, является сложным и длительным процессом, основанным на измерениях тормозного пути, на оценке расположения автомобилей на месте аварии и состояния их после аварии, дающих косвенную информацию о направлении движения, скорости и силы удара при столкновении. Т.е. информация о предыстории события основывается не на прямых измерениях, что часто приводит к ложным выводам. Сбор этих данных, составление документов на месте происшествия вызывают значительные задержки движения на улицах и автодорогах, что создает недопустимые в современных условиях задержки движения других транспортных средств.
Известен способ восстановления траектории движения транспортного средства при дорожно-транспортном происшествии посредством интегрирования регистрируемых параметров пространственного положения ТС в обратном времени (см. заявку ФРГ №4132981 А1, МКИ G 07 С 5/08, 06.08.1992 ).
Указанный способ не позволяет правильно учесть скольжение (юз) ТС после столкновения с другим транспортным средством, т.к. первый аналоговый датчик измеряет только продольную скорость ТС (или проекцию скорости на продольную ось ТС) путем определения скорости вращения заднего колеса ТС, а дополнительная регистрация вторым датчиком поперечного ускорения не учитывает возможный крен ТС, например, из-за наклона дорожного полотна или переворота ТС, что после интегрирования приводит к большим ошибкам в определении истинной траектории движения ТС.
Известна система регистрации функционирования и состояния транспортного средства и условий окружающей среды, реализующая при работе способ, включающий измерение параметров движения транспортного средства (см. патент Великобритании №2268608, МКИ G 07 С 5/08, 1994 г.).
Это решение не позволяет строить пространственную траекторию транспортного средства и соответственно проводить достоверный анализ дорожно-транспортного происшествия, а его реализация связана с существенными затратами, вызванными необходимостью встраивания датчиков практически во все узлы транспортного средства, что возможно только на заводе-изготовителе или в условиях специализированного автопредприятия.
Известен способ построения пространственной траектории движения транспортного средства по зарегистрированным данным с использованием инерциальных измерительных средств (см. патент России №2193989, МКИ В 62 D 41/00, 2001 г.).
В нем выполняют измерение боковой и вертикальной перегрузок в передней и задней частях транспортного средства с помощью акселерометров, а также продольной и вертикальной перегрузок в передней части транспортного средства на его продольной оси также с помощью акселерометров.
Такой способ и устройство для его реализации обладают рядом недостатков.
Во-первых, рассредоточенная по объему транспортного средства система датчиков не позволяет обеспечить их точную ориентацию относительно друг друга. Обеспечение параллельности осей чувствительности акселерометров, разнесенных на расстояние, равное длине транспортного средства, представляет сложную техническую проблему. К тому же жесткость шасси транспортного средства к изгибу оставляет желать лучшего. Непараллельность осей акселерометров, разнесенных в разные части транспортного средства на расстояния Lx и Lz, может достигать нескольких долей угловых градусов, что после двойного интегрирования вызывает большие ошибки восстановления траектории движения транспортного средства, достигающие нескольких метров за каждую секунду движения.
Во-вторых, для надежного восстановления траектории по данным с акселерометров требуется знать достоверно массу каждого транспортного средства и моменты инерции относительно каждой из трех ортогональных осей X, Y и Z, которые сложно измерить, и они могут изменяться непредвиденным образом (например, если посадили в салон еще одного пассажира). Это также приводит к значительным дополнительным ошибкам в определении траектории движения транспортного средства.
Техническим результатом заявляемого способа и устройства является повышение точности восстановления скорости и траектории движения в плане как до, так и после ДТП, а также устранение других недостатков прототипа, указанных выше.
Указанный технический результат достигается тем, что в способе восстановления скорости и траектории движения транспортного средства по зарегистрированным данным при дорожно-транспортных происшествии (ДТП), включающем измерение параметров движения, по меньшей мере ускорений, сохранение в запоминающем устройстве результатов измерений с последующим воспроизведением и анализом результатов измерений, дополнительно измеряют текущие значения проекций угловой скорости транспортного средства на три его геометрические взаимно ортогональные оси, а результаты измерений используют для построения траектории в проекции на горизонтальную плоскость по координатам Хм и Yм в местной системе координат как функции времени t, определяемым по следующим уравнениям движения транспортного средства в пространстве:
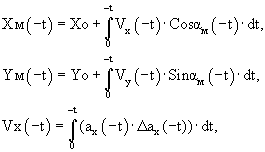

где Vx(-t), Vy(-t) - продольная и поперечная скорости транспортного средства в собственной системе координат, полученные путем интегрирования истинных продольного и поперечного ускорений в обратном времени;
аx(-t), ay(-t) - измеренные значения проекций полного (кажущегося) ускорения на продольную и поперечную геометрические оси транспортного средства;
Δax(-t), Δay(-t) - разница между проекциями истинного ускорения и проекциями полного (кажущегося) ускорения на продольную и поперечную геометрические оси транспортного средства;
αм, βм, γм - углы разворота транспортного средства по курсу, тангажу и крену в местной системе координат, полученные путем интегрирования проекций угловых скоростей в обратном времени;
 - проекции угловых скоростей транспортного средства на его геометрические, соответственно вертикальную, боковую и продольную оси, измеренные датчиками угловой скорости в собственной системе координат;
- проекции угловых скоростей транспортного средства на его геометрические, соответственно вертикальную, боковую и продольную оси, измеренные датчиками угловой скорости в собственной системе координат;
α0, β0, γ0 - “конечные” углы разворота неподвижного после ДТП транспортного средства в местной системе координат.
В устройстве для восстановления скорости и траектории движения транспортного средства по зарегистрированным данным при дорожно-транспортном происшествии указанный технический результат достигается тем, что в прототип, содержащий два микромеханических акселерометра с осями чувствительности, ориентированными соответственно в направлении продольной и поперечной перегрузок транспортного средства, микроконтроллер, соединенный с выходами акселерометров через аналогово-цифровые преобразователи, введены три микромеханических датчика угловой скорости (ДУС) с взаимно ортогональными осями чувствительности, выходы которых подключены через аналого-цифровые преобразователи к входам микроконтроллера, причем ось чувствительности первого ДУС ориентирована в направлении продольной, второго - в направлении вертикальной, а третьего - боковой перегрузок транспортного средства.
Кроме того, микромеханические акселерометры, датчики угловой скорости, аналого-цифровые преобразователи и микроконтроллер размещены в едином корпусе, снабженном установочной базой для закрепления его на транспортном средстве.
Кроме того, в него могут быть введены два дополнительных микромеханических акселерометра с ортогонально расположенными осями чувствительности, причем оси чувствительности дополнительных акселерометров попарно параллельны осям чувствительности основных микромеханических акселерометров, а выходы дополнительных акселерометров соединены с микроконтроллером через аналого-цифровые преобразователи, при этом диапазон измеряемых ускорений дополнительных микромеханических акселерометров больше соответствующего диапазона основных акселерометров.
Кроме того, в него могут быть введены последовательно включенные блок предельных ускорений и блок энергонезависимой памяти данных, подключенный к выходу микроконтроллера, причем блок предельных ускорений подключен к выходам основных акселерометров.
Если угловую скорость транспортного средства относительно вертикальной оси  измерить с помощью имеющегося датчика угловой скорости, то, интегрируя ее в обратном времени, можно получить все предыдущие углы разворота транспортного средства по курсу в сопровождающей системе координат:
измерить с помощью имеющегося датчика угловой скорости, то, интегрируя ее в обратном времени, можно получить все предыдущие углы разворота транспортного средства по курсу в сопровождающей системе координат:
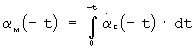
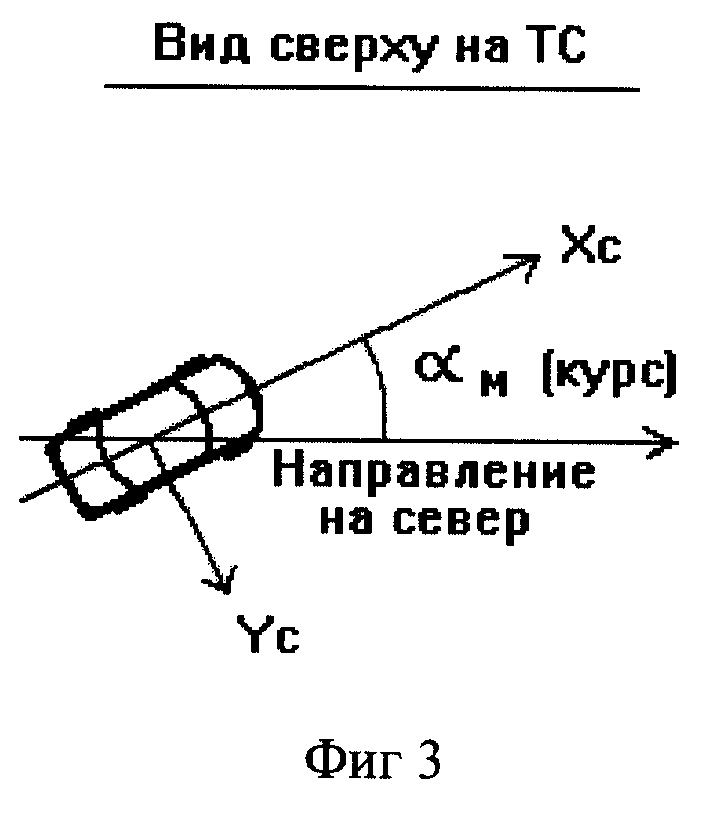
Чтобы получить изменение курса транспортного средства в местной системе координат, достаточно добавить начальные условия, т.е. “конечный” угол разворота транспортного средства после аварии α0. Последний можно определить в процессе расследования ДТП, пользуясь, например, компасом:
αм(-1)=α0+αс(-1)
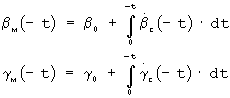
Аналогично для других осей
Акселерометры Х и Y вместе дают проекции вектора кажущегося ускорения на горизонтальную плоскость. Интегрируя их в обратном времени, можно получить горизонтальные проекции скорости в собственной системе координат транспортного средства.

где Vx(-t),Vy(-t) - продольная и поперечная скорости транспортного средства в собственной системе координат, полученные путем интегрирования истинных продольного и поперечного ускорений в обратном времени;
ax(-t),ay(-t) - измеренные значения проекций полного (кажущегося) ускорения на продольную и поперечную геометрические оси транспортного средства;
Δax(-t),Δay(-t) - разница между проекциями истинного ускорения и проекциями полного (кажущегося) ускорения на продольную и поперечную геометрические оси транспортного средства;
αм,βм,γм - углы разворота транспортного средства по курсу, тангажу и крену в местной системе координат, полученные путем интегрирования проекций угловых скоростей в обратном времени;
 - проекции угловых скоростей транспортного средства на вертикальную, боковую и продольную оси, измеренные датчиками угловой скорости в собственной системе координат.
- проекции угловых скоростей транспортного средства на вертикальную, боковую и продольную оси, измеренные датчиками угловой скорости в собственной системе координат.
Разницу между истинным и полным (кажущимся) ускорением можно рассчитать по формулам:
Δах(-t)=Sin(βм(-t))
Δау(-t)=Sin(γм(-t))
где α0,β0,γ0 - “конечные” углы разворота неподвижного (после ДТП) транспортного средства в местной системе координат.
Траектории движения транспортных средств должны быть представлены в местной прямоугольной системе координат. Для перехода в местную систему координат вторичное интегрирование нужно проводить с учетом курсовых углов:
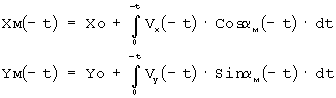
Здесь все входящие параметры, кроме X0 и Y0, были определены ранее. Последние играют существенную роль только в случае, если количество транспортных средств, участвовавших в ДТП, больше одного. Тогда X0 и Y0 - это координаты расположения центра масс каждого транспортного средства в местной системе координат.
Изобретения иллюстрируются чертежами.
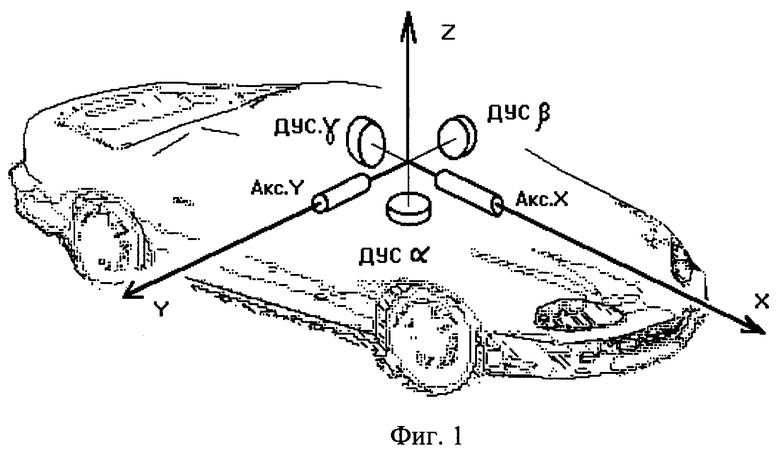
На фиг.1 изображено взаимное положение геометрических осей транспортного средства и ориентация измерительных средств относительно этих осей.
На фиг.2 схематично показана траектория транспортного средства в местной системе координат и относительное положение собственной системы координат транспортного средства.
На фиг.3 показана схема отсчета курсового угла транспортного средства.
На фиг.4 показана схема отсчета тангажного угла транспортного средства.
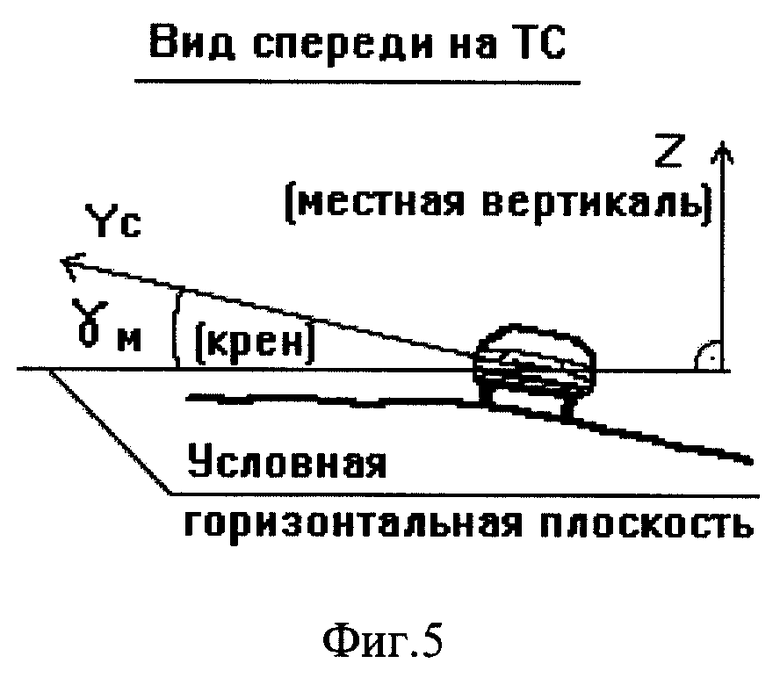
На фиг.5 показана схема отсчета кренового угла транспортного средства.
На фиг.6 представлена блок-схема устройства, реализующая заявляемый способ.
Устройство для восстановления скорости и траектории движения транспортного средства по зарегистрированным данным при дорожно-транспортных происшествиях должно содержать корпус 1 с установочной базой, два микромеханических акселерометра 2, 3 с ортогонально расположенными в плоскости горизонта осями чувствительности, микроконтроллер 4, соединенный с выходами акселерометров через аналогово-цифровые преобразователи 5, три микромеханических датчика угловой скорости (ДУС) 6, 7, 8 с ортогонально расположенными осями чувствительности (к повороту), выходы которых подключены через аналого-цифровые преобразователи к входам микроконтроллера, причем ось чувствительности одного из ДУС направлена вдоль продольной геометрической оси транспортного средства, другого - вверх, а третьего - вбок.
Для синхронизации поступления и записи информации на борту необходимо иметь счетчик времени и календарь.
С целью расширения диапазона измерения ускорения, при сохранении относительной точности в заявляемое устройство введены еще два дополнительных микромеханических акселерометра 9, 10 с ортогонально расположенными осями чувствительности, причем оси чувствительности дополнительных акселерометров попарно параллельны осям чувствительности основных микромеханических акселерометров, а диапазон допустимых измеряемых ускорений существенно превышает диапазон чувствительности основных акселерометров, выходы дополнительных акселерометров также соединены с микроконтроллером через аналого-цифровые преобразователи.
Для того чтобы эффективно использовать энергонезависимую память устройства, в него введен блок предельных ускорений 11, обнаруживающий превышение величины ускорения по модулю над допустимым уровнем, и блок энергонезависимой памяти данных 12, подключенный к выходу микроконтроллера и организованный постранично так, чтобы запись данных осуществлялась циклически только в пределах одной страницы, а переход на другую страницу осуществлялся по сигналу с блока предельных ускорений.
Аппаратура сотрудника ГИБДД, расследующего аварию, позволит восстановить ситуацию, если в ней будет программа, вычисляющая траекторию по представленным выше формулам, и распечатать на месте происшествия график скорости и траекторию движения каждого участвующего в ДТП транспортного средства как перед столкновением, так и после него.
Если оба транспортных средств, участвовавших в происшествии, оборудованы заявляемым устройством, то это поможет восстановить всю предысторию аварии. Все работы по замерам на месте происшествия становятся ненужными, что снизит до минимума задержки других автомобилей на данном участке дороги.
Таким образом, предложенными способом и устройством достигнут технический результат, заключающийся в повышении точности восстановления скорости и траектории движения до и после ДТП, а также устранят другие недостатки прототипа, указанные выше.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВОЕ УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПРИ ДОРОЖНО-ТРАНСПОРТНОМ ПРОИСШЕСТВИИ | 2011 |
|
RU2480834C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ИНФОРМАЦИИ О ТРАНСПОРТНОМ СРЕДСТВЕ | 2005 |
|
RU2298832C2 |
| СПОСОБ ПОСТРОЕНИЯ ПРОСТРАНСТВЕННОЙ ТРАЕКТОРИИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПО ЗАРЕГИСТРИРОВАННЫМ ДАННЫМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2193989C1 |
| Способ управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства и устройство для его осуществления | 2020 |
|
RU2751471C1 |
| СПОСОБ ИЗМЕРЕНИЯ УКЛОНОВ И ЦИФРОВОЙ ИЗМЕРИТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2227899C1 |
| СИСТЕМА СБОРА И АНАЛИЗА ДАННЫХ О ДОРОЖНО-ТРАНСПОРТНОМ ПРОИСШЕСТВИИ | 2003 |
|
RU2222830C1 |
| СИСТЕМА РЕГИСТРАЦИИ И ВОССТАНОВЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2221277C1 |
| Сейсмокардиоблок и способ измерения сейсмокардиоцикла | 2017 |
|
RU2679296C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА МАШИНЫ | 2014 |
|
RU2566153C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2014 |
|
RU2572434C1 |



Группа изобретений относится к области исследования дорожно-транспортных происшествий и предназначена для использования при построении пространственной траектории движения транспортного средства по зафиксированным данным. Предложенный способ предусматривает измерение параметров движения, по меньшей мере ускорений, и сохранение в запоминающем устройстве результатов измерений с последующим воспроизведением и анализом результатов измерений. Дополнительно измеряют текущие значения проекций угловой скорости транспортного средства на три его геометрические взаимно ортогональные оси, а результаты измерений используют для построения траектории в проекции на горизонтальную плоскость по координатам в местной системе координат как функции обратного времени, определяемым по выявленным уравнениям движения транспортного средства в пространстве. Предложенное устройство содержит два микромеханических акселерометра с осями чувствительности, ориентированными соответственно в направлении продольной и поперечной перегрузок транспортного средства, и микроконтроллер, соединенный с выходами акселерометров через аналогово-цифровые преобразователи. Кроме того, в устройство введены три микромеханических датчика угловой скорости с взаимно ортогональными осями чувствительности, выходы которых подключены через аналого-цифровые преобразователи к входам микроконтроллера. При этом ось чувствительности одного датчика ориентирована в направлении продольной, другого - вертикальной, а третьего - боковой перегрузок транспортного средства. Группой изобретений достигается технический результат, заключающийся в повышении точности восстановления скорости и траектории движения до и после дорожно-транспортного происшествия. 2 н. и 3 з.п. ф-лы, 6 ил.


где Vx(-t),Vy(-t) - продольная и поперечная скорости транспортного средства в собственной системе координат, полученные путем интегрирования истинных продольного и поперечного ускорений в обратном времени;
 (-t),
(-t),  (-t) - измеренные значения проекций полного ускорения на продольную и поперечную геометрические оси транспортного средства;
(-t) - измеренные значения проекций полного ускорения на продольную и поперечную геометрические оси транспортного средства;
 (-t),
(-t),  (-t) - разницы между проекциями истинного ускорения и проекциями полного ускорения на продольную и поперечную геометрические оси транспортного средства;
(-t) - разницы между проекциями истинного ускорения и проекциями полного ускорения на продольную и поперечную геометрические оси транспортного средства;
αм, βм, γм - углы разворота транспортного средства по курсу, тангажу и крену в местной системе координат, полученные путем интегрирования проекций угловой скорости в обратном времени;
 - проекции угловой скорости транспортного средства на его геометрические, соответственно, вертикальную, боковую и продольную оси, измеренные датчиками угловой скорости в собственной системе координат;
- проекции угловой скорости транспортного средства на его геометрические, соответственно, вертикальную, боковую и продольную оси, измеренные датчиками угловой скорости в собственной системе координат;
α0, β0, γ0 - “конечные” углы разворота неподвижного, после ДТП, транспортного средства в местной системе координат.
| СПОСОБ ПОСТРОЕНИЯ ПРОСТРАНСТВЕННОЙ ТРАЕКТОРИИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПО ЗАРЕГИСТРИРОВАННЫМ ДАННЫМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2193989C1 |
| СУХОЙ ПРЕПАРАТ КУРИНОЙ ЖЕЛЧИ (БАД-"СТИКФЕЛ") И СПОСОБ ЕГО ПОЛУЧЕНИЯ | 2003 |
|
RU2268608C2 |
| DE 4132981 A, 06.08.1992 | |||
| RU 99123668 A, 20.09.2001. | |||

