Изобретение относится к радионавигации и может быть использовано для решения задачи контроля целостности (КЦ) поля системы навигационных космических аппаратов (НКА). Целостность навигационной системы является составной и главной частью достоверности навигационных измерений.
Целостность использования спутниковой радионавигационной системы (СРНС) означает способность системы исключить неверную навигационную спутниковую информацию из последующей обработки, то есть изолировать отказавшийся спутник. Под отказом спутника здесь понимают такое его состояние, при котором использование его радионавигационных параметров, определяемых по сигналу этого НКА, ухудшает точность определения координат и времени потребителя, превышающих заданный порог. Закладка оперативной информации в НКА СРНС ГЛОНАСС осуществляется один раз в 12 часов. В промежутке между закладкой информации наземный контрольный сегмент выполняет оперативный контроль за функционированием НКА. Однако такой контроль не может осуществляться из-за ограниченного времени видимости НКА наземным контрольным сегментом. Поэтому КЦ целесообразно проводить всеми доступными способами: автономно на борту НКА; наземным контрольным сегментом СРНС; геостационарными спутниками; аппаратурой контрольных станций и других радионавигационных систем с последующей передачей информации о целостности системы НКА потребителям, собственно в аппаратуре потребителя(АП) навигационной системы (НС).
Контроль целостности радионавигационного поля СРНС заключается в контроле качества излучаемых НС навигационных радиосигналов и качества передаваемой ими навигационной информации с целью поддержания высокой достоверности навигационных измерений и/или предупреждения потребителей о состоянии системы. Недостатки этого контроля заключаются в его неполноте [1]. Например, средства самоконтроля рассчитаны на обнаружение не всех возможных нарушений в работе каждой бортовой системы НС; неисправности самих средств контроля не обнаруживаются и не сопровождаются передачей соответствующего сообщения потребителям; искажение эфемерид не может быть обнаружено на самом НС и т.д. Заметим, что иногда с грубыми ошибками в дальномерных измерениях, вызванными соответствующими отказами НС, целесообразно бороться не исключением сигнала отказавшего спутника, а использованием избыточных навигационных определений.
Известно устройство [2], состоящее из 8 НКА, равномерно расположенных на одной орбите, в каждом из которых имеется бортовая аппаратура, усилитель мощности (УМ), антенна и навигационная аппаратура потребителя (НАП), усилитель мощности (УМ) навигационного сигнала, антенна, навигационная аппаратура потребителя (НАП) и решающее устройство (РУ), причем для первого НКА на данной орбите выход бортовой аппаратуры первого НКА подключен к входу УМ, а выход УМ подключен к антенне, которая подает сигнал на вход НАП второго НКА, а выход НАП второго НКА подключен к входу бортовой аппаратуры второго НКА, для второго НКА выход бортовой аппаратуры НКА подключен к входу УМ, а выход УМ подключен к антенне, которая подает сигнал на вход НАП третьего НКА, выход которой подключен к входу бортовой аппаратуры третьего НКА и так далее, для n-го НКА выход бортовой аппаратуры НКА подключен к входу УМ, а выход УМ подключен к антенне, которая подает сигнал на вход НАП первого НКА, выход которой подключен к входу бортовой аппаратуры первого НКА, использующее свойство самой системы НКА: спутники орбиты одной плоскости размещаются равномерно и расстояние между ними не меняется. НКА имеет в своем составе бортовой управляющий комплекс, бортовой навигационный передатчик, бортовой хронизатор [2].
Недостатками данного построения системы контроля целостности поля системы НКА является недостаточная надежность радиоканалов между НКА. В результате в случаях повреждения радиоканала по какой-либо технической причине или по причине несанкционированных действий постороннего наблюдателя целостность системы может быть нарушена и до очередного сеанса с наземным комплексом потребители могут получать навигационную информацию с большими погрешностями.
Цель изобретения: создание устройства с расширенными функциями НКА сохранения информационной «привязки» НКА на орбите относительно друг друга, как в прямую, так и в обратную сторону. То есть, если информационный радиоканал между i-м и (i+1)-м (i изменяется от 1 до n) НКА перестает функционировать, i-й НКА передает информацию на вход (i-1)-го НКА. В этом случае вся группировка НКА будет связана.
Указанная цель достигается тем, что в устройство для контроля целостности поля системы навигационных космических аппаратов устанавливается в каждый из n НКА управляемый коммутатор (УК), к первому информационному входу которого подключен выход антенны следующего НКА, а ко второму информационному входу УК подключен выход антенны предыдущего НКА, управляющий вход каждого УК подключен к управляющему выходу РУ соответствующего НКА. То есть, если нарушается работа радиоканала между i-м и (i-1)-м НКА, РУ i-го НКА выдает команду на i-й УК, который подключает на вход НАП сигнал с (i+1)-го НКА.
Реализуемость блоков предлагаемого устройства на стандартных, выпускаемых промышленностью элементах, позволяет сделать вывод о соответствии технического решения критерию «промышленная применимость».
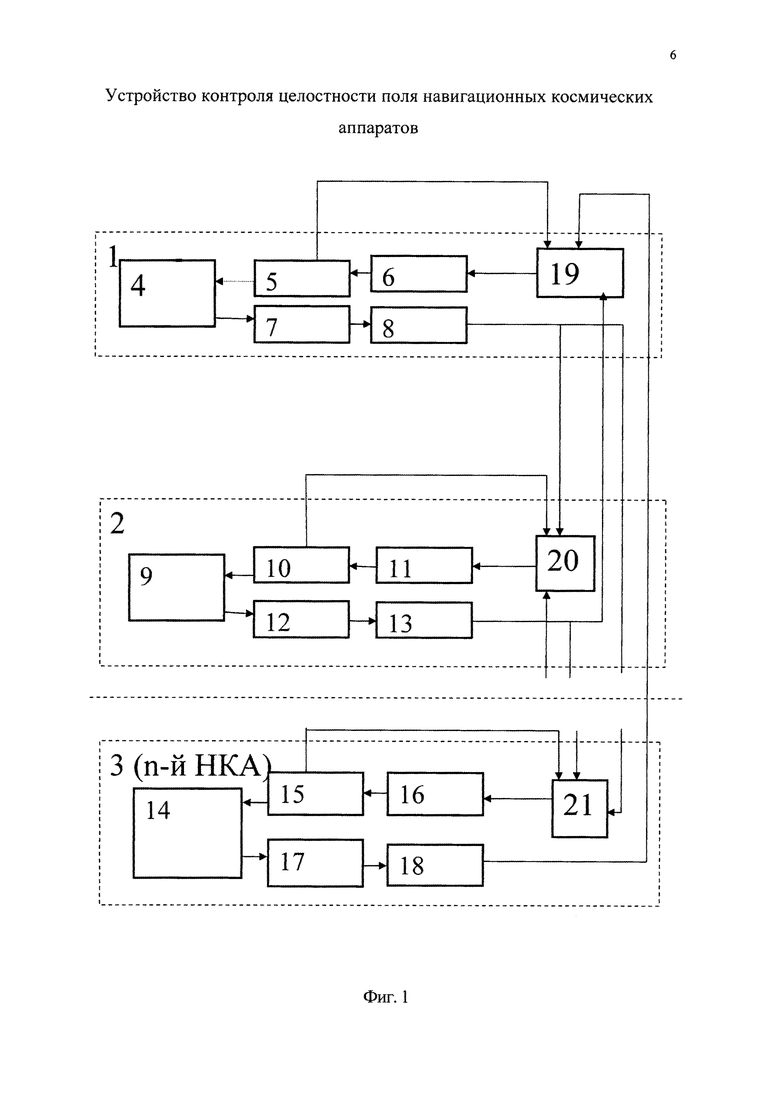
На фиг. 1 представлена структурная схема устройства для эфемеридного обеспечения НКА.
Устройство содержит блоки 1, 2 в качестве первого и второго НКА одной орбиты соответственно, а также блок 3 n-го (последнего) НКА этой орбиты, включающие соответственно блоки 4, 9, 14 бортовой аппаратуры НКА, блоки 5, 10, 15 РУ, блоки 6, 11, 16 НАП, блоки 7, 12, 17 УМ, блоки 8, 13, 18 антенн этих НКА, блоки 19, 20, 21, управляемые коммутаторы по числу НКА.
Выходы блоков 6, 11, 16 НАП КА подключены соответственно к входам блоков 5, 10, 15 РУ, выходы блоков 5, 10, 15 подключены соответственно к входам блоков 4, 9, 14 бортовой аппаратуры НКА, выходы блоков 4, 9, 14 подключены соответственно к входам блоков 7, 12, 17 УМ, выходы которых подключены соответственно к входам блоков 8, 13, 18 антенн НКА, подключены к информационным входам соответствующих блоков 19, 20, 21 УК, управляющие ходы которых подключены к соответствующим РУ.
Устройство для контроля целостности поля системы навигационных космических аппаратов работает следующим образом.
Радионавигационные сигналы, формируемые бортовой аппаратурой первого НКА. усиливаемые усилителем мощности, поступают на антенну и передаются на УК второго НКА, где они принимаются НАП и передаются в РУ, выдающему признак достоверности навигационной информации НКА в бортовую аппаратуру второго НКА. Радионавигационные сигналы, формируемые бортовой аппаратурой второго НКА, усиливаемые усилителем мощности, поступают на антенну и передаются на УК третьего НКА, где они принимаются НАП и передаются в РУ, выдающему признак достоверности навигационной информации НКА в бортовую аппаратуру третьего НКА и так далее. Радионавигационные сигналы, формируемые бортовой аппаратурой последнего, n-го НКА, усиливаемые усилителем мощности, поступают на антенну и передаются на УК первому НКА, где они принимаются НАП и передаются в РУ, выдающему признак достоверности навигационной информации НКА в бортовую аппаратуру первого НКА. РУ всех НКА осуществляют переключение входящих сигналов в зависимости от состояния радиоканала между НКА.
В РУ проводится навигационных параметров и расстояния между соседними НКА. При превышении заданных значений выдается признак отказа в бортовую аппаратуру НКА, закладывающую данные в состав оперативной информации в качестве признака достоверности в навигационном кадре.
Список литературы.
1. ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Перова, В.Н. Харисова. Изд. 4-е. - М.: Радиотехника, 2010.
2. Патент РФ: 2550146 С1. По заявке 2014101143/07 от 16.01.2014.
Изобретение относится к радиотехнике и может использоваться в навигационной аппаратуре потребителя. Технический результат состоит в повышении надежности автономного контроля целостности поля системы навигационных космических аппаратов (НКА). Для этого устройство содержит n, где n не меньше восьми, НКА одной орбиты, в состав каждого из которых входит: бортовая аппаратура НКА, усилитель мощности навигационного сигнала, антенна, навигационная аппаратура потребителя, решающее устройство, управляемый коммутатор, управление которым осуществляется решающим устройством. 1 ил.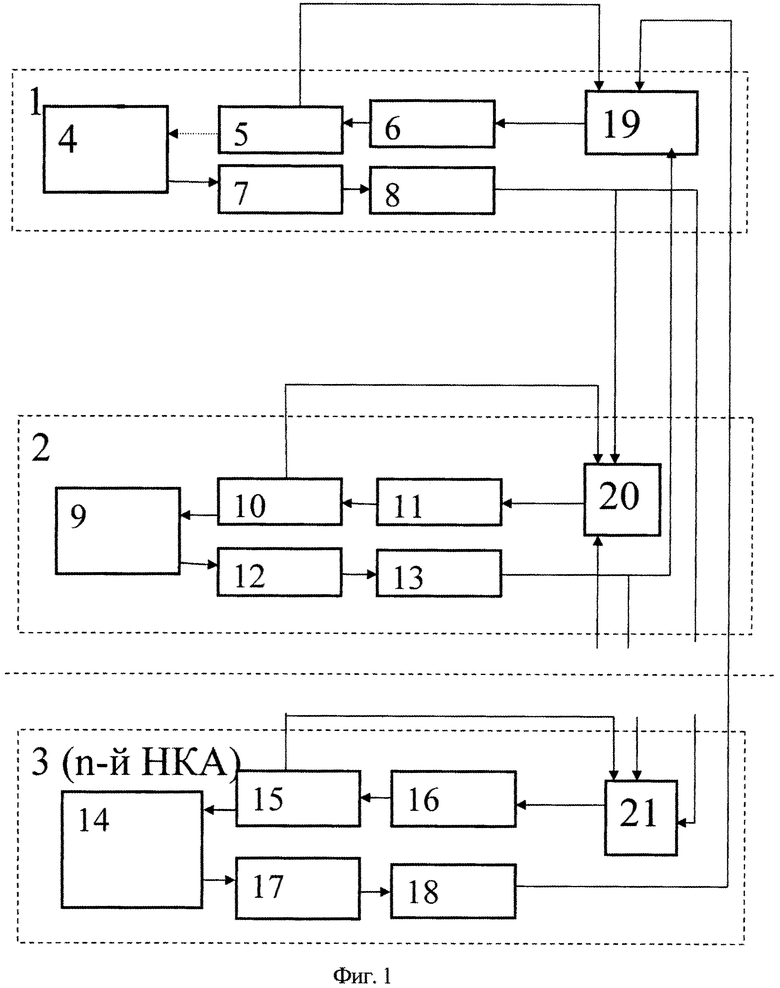
Устройство для контроля целостности поля системы навигационных космических аппаратов, состоящее из n, где n не меньше восьми, навигационных космических аппаратов, равномерно расположенных на одной орбите, в каждом из которых имеется бортовая аппаратура, усилитель мощности, антенна и навигационная аппаратура потребителя, усилитель мощности навигационного сигнала, антенна, навигационная аппаратура потребителя и решающее устройство, причем для первого навигационного космического аппарата на данной орбите выход бортовой аппаратуры первого навигационного космического аппарата подключен к входу усилителя мощности, а выход усилителя мощности подключен к антенне, которая подает сигнал на вход навигационной аппаратуре второго НКА, а выход НАП второго НКА подключен к входу бортовой аппаратуры второго НКА, для второго НКА выход бортовой аппаратуры НКА подключен к входу УМ, а выход УМ подключен к антенне, которая подает сигнал на вход НАП третьего НКА, выход которой подключен к входу бортовой аппаратуры третьего НКА и так далее, для n-го НКА выход бортовой аппаратуры НКА подключен к входу УМ, а выход УМ подключен к антенне, которая подает сигнал на вход НАП первого НКА, выход которой подключен к входу бортовой аппаратуры первого НКА,
отличающееся тем, что для надежности контроля целостности поля системы НКА каждый из n НКА содержит управляемый коммутатор УК, к первому информационному входу которого подключен выход антенны следующего НКА, а ко второму информационному входу УК подключен выход антенны предыдущего НКА, управляющий вход каждого из n УК подключен к управляющему выходу РУ соответствующего НКА.
| Автомат для изготовления трикотажной иглы | 1951 |
|
SU98914A1 |
| Упаковочный деревянный ящик | 1944 |
|
SU66134A1 |
| СИСТЕМА ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ ПО НАВИГАЦИОННЫМ РАДИОСИГНАЛАМ С САНКЦИОНИРОВАННЫМ ДОСТУПОМ В РЕЖИМЕ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК | 2000 |
|
RU2161317C1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2152050C1 |

