ОБЛАСТЬ ТЕХНИКИ
[0001] Изобретение относится, в общем, к вычислительным системам и способам, а в частности к системам и способам мониторинга территории с использованием управляемой видеокамеры.
УРОВЕНЬ ТЕХНИКИ
[0002] В уровне техники существуют системы и способы мониторинга, в которых мониторинг происходит с использованием поворотных камер, при этом, если используются исключительно поворотные камеры, для непрерывного наблюдения камера должна проходить маршрут, последовательно изменяя направление обзора, переходя от одной точки к другой.
[0003] Из уровня техники известна заявка на патент US 20150116488 Al Method for controlling a monitoring system and a system for its implementation», патентообладатель: Ivan Sergeevich Shishalov, Andrei Viktorovich Filimonov, Oleg Andreevich Gromazin, Sergei Vyacheslavovich Brunov, опубликовано: 30.04.2015.
[0004] Данное изобретение относится в целом к области видеонаблюдения и более конкретно к способу управления системой мониторинга леса. Технический результат заключается в повышении надежности обнаружения (вероятности обнаружения), уменьшении вероятности ложного срабатывания, или ложного обнаружения объекта, уменьшении времени, необходимого на обнаружение, на осмотр и анализ информации о территории. Технический результат достигается за счет способа, который включает следующие этапы: вначале собирают текущую информацию об объекте наблюдения; создают маршрут для осмотра территории, по меньшей мере, одним средством наблюдения, состоящий из множества точек с фиксированными значениями ориентации средства наблюдения, которые выбирают таким образом, чтобы оптимально осмотреть всю возможную по техническим характеристикам средства наблюдения, рельефу местности и высоте сооружения территорию, и которые определяют множество участков наблюдения, при этом средство наблюдения просматривает каждый участок неподвижно с заданным значением увеличения.
[0005] Такой способ предполагает, что в каждый момент времени происходит наблюдение только части территории или объекта. При этом полный цикл осмотра характеризуется неким временем Т, за которое камера проходит маршрут, и возвращается на исходную точку, начиная маршрут с начала.
[0006] Очевидно, что в определенных условиях это время может быть существенным: когда территория большая, а детальность рассмотрения объекта высокая (например, при обнаружении лесных пожаров необходимо максимальное приближение камеры, а территория осмотра исчисляется десятками квадратных километров).
[0007] В этом случае, время обнаружения объекта с момента его возникновения (в случае если объект неподвижен) будет связано со временем осмотра маршрута Т, причем, чем больше время осмотра, тем больше время от момента возникновения до обнаружения объекта. Данную характеристику по аналогии с методами радиолокации можно назвать временным разрешением.
[0008] При этом для автоматизированных систем (в общем случае и для наблюдения оператором прямым способом) чем больше информации накоплено об объекте, тем меньше вероятность пропустить искомый объект. В частности, чем дольше будет производиться съемка каждой конкретной точки, тем меньше вероятность пропустить искомый объект. Аналогично, можно привести пример и про приближение камеры (ZOOM): чем больше приближение камеры, тем меньше вероятность пропустить искомый объект, т.к. объект будет на изображении крупнее, но при этом уменьшается угол обзора, а значит полный цикл осмотра территории займет больше времени, т.к. увеличится количество точек в маршруте осмотра.
[0009] Как видно, эти два параметра (надежность обнаружения и оперативность обнаружения) вступают друг с другом в противоречие: с увеличением времени осмотра повышается надежность обнаружения, но, очевидно, уменьшается оперативность обнаружения, и наоборот.
[00010] Ситуация для автоматизированных систем еще усложняется наличием ложных срабатываний, вероятность возникновения которых должна быть уменьшена. Вероятность ложного срабатывания зависит от времени наблюдения и чувствительности механизма обнаружения, в частности от способа работы и настроек детектирующего механизма, осуществляющего обнаружение.
[00011] В целом, основным подходом к решению данной проблемы является оптимизация маршрутов осмотра территории под решаемую задачу. В случае применения таких систем для обнаружения лесных пожаров фактором влияния может являться вероятность возникновения лесных пожаров (например, известно, что в каком-то направлении больше вероятность возникновения пожаров, целесообразно в этом направлении проводить более детальный мониторинг), или условия обнаружения (например, известно, что в данном направлении плохая видимость из-за тумана, значит данное направление можно исключить из осмотра, потратив время на осмотр направлений с лучшей видимостью).
[00012] Все такие подходы предполагают наличие достаточно подробной информации о целевом объекте наблюдения, которую зачастую сложно получить. Кроме того, часть влияющих параметров может изменяться в процессе мониторинга, что также усложняет реализацию таких подходов, например, как в патенте US 20150116488, описанном выше.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[00013] Изобретение направлено на устранение недостатков, свойственных решениям, известным из уровня техники.
[00014] Техническим результатом является повышение надежности обнаружения целевого объекта наблюдения.
[00015] При повышении надежности обнаружения искомого объекта, уменьшается вероятность ложных срабатываний и отсутствует необходимость предварительно (или в процессе наблюдения) получать информацию об объекте, территории наблюдения.
[00016] Указанный технический результат достигается благодаря способу мониторинга территории с помощью управляемой видеокамеры, в котором получают последовательность кадров наблюдаемой территории посредством первичного прохода управляемой видеокамерой заданного маршрута, причем в каждой точке маршрута получают, по меньшей мере, один кадр; определяют на полученной последовательности кадров наличие целевых объектов наблюдения с помощью детектирующего механизма; в случае обнаружения целевых объектов наблюдения, определяют пиксельные координаты на, по меньшей мере, одном кадре последовательности, по меньшей мере, одного целевого объекта наблюдения; вычисляют направление обзора камеры, обеспечивающее получение изображения, по меньшей мере, одного целевого объекта наблюдения на основании: пиксельных координат целевого объекта наблюдения, определенных на предыдущем шаге, внутренней калибровки и направления обзора управляемой видеокамеры; наводят управляемую камеру по меньшей мере один раз по направлению обзора по меньшей одного целевого объекта наблюдения, получают по меньшей мере один кадр, содержащий целевой объект наблюдения и обрабатывают кадр детектирующим механизмом, на основании данных об обнаружении целевых объектов наблюдения по меньшей мере по одному повторному проходу, принимают решение о наличии целевого объекта наблюдения на кадре, полученном при первичном проходе.
[00017] В некоторых вариантах осуществления технического решения при повторном проходе количество кадров больше, чем количество кадров при первом проходе.
[00018] В некоторых вариантах осуществления технического решения получают более одного кадра в каждой точке съемки, а при повторном проходе увеличивают время съемки каждой позиции съемки.
[00019] В некоторых вариантах осуществления технического решения при повторном проходе увеличивают приближение камеры.
[00020] В некоторых вариантах осуществления технического решения изменяют обнаружительную способность с помощью конфигурирования детектирующего механизма.
[00021] Также указанный технический результат достигается благодаря системе мониторинга территории с помощью управляемой видеокамеры, которая включает управляемую видеокамеру; одно или более устройств обработки данных; одно или более устройств хранения данных; одну или более программ, где одна или более программ хранятся на одном или более устройстве хранения данных и исполняются на одном и более устройстве обработки данных, причем одна или более программ включает следующие инструкции, которые при их выполнении на, по меньшей мере, одном устройстве обработки данных, позволяют: осуществлять получение последовательности кадров наблюдаемой территории посредством первичного прохода управляемой видеокамерой заданного маршрута, причем в каждой точке маршрута получают, по меньшей мере, один кадр; осуществлять определение на полученной последовательности кадров наличия целевых объектов наблюдения с помощью детектирующего механизма; в случае обнаружения целевых объектов наблюдения, осуществлять определение пиксельных координат на, по меньшей мере, одном кадре последовательности, по меньшей мере, одного целевого объекта наблюдения; осуществлять вычисление направления обзора видеокамеры, обеспечивающего получение изображения, по меньшей мере, одного целевого объекта наблюдения на основании пиксельных координат целевого объекта наблюдения, определенных на предыдущем шаге, внутренней калибровки и направлении обзора управляемой видеокамеры; осуществлять наведение управляемой видеокамеры по меньшей мере один раз по направлению обзора по меньшей мере одного целевого объекта наблюдения, и получение по меньшей мере одного кадра, содержащего целевой объект наблюдения, и выполнять обработку упомянутого кадра детектирующим механизмом; на основании данных об обнаружении целевых объектов наблюдения по меньшей мере по одному повторному проходу, осуществлять принятие решения о наличии целевого объекта наблюдения на кадре, полученном при первичном проходе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[00022] Признаки и преимущества настоящего технического решения станут очевидными из приводимого ниже подробного описания и прилагаемых чертежей, на которых:
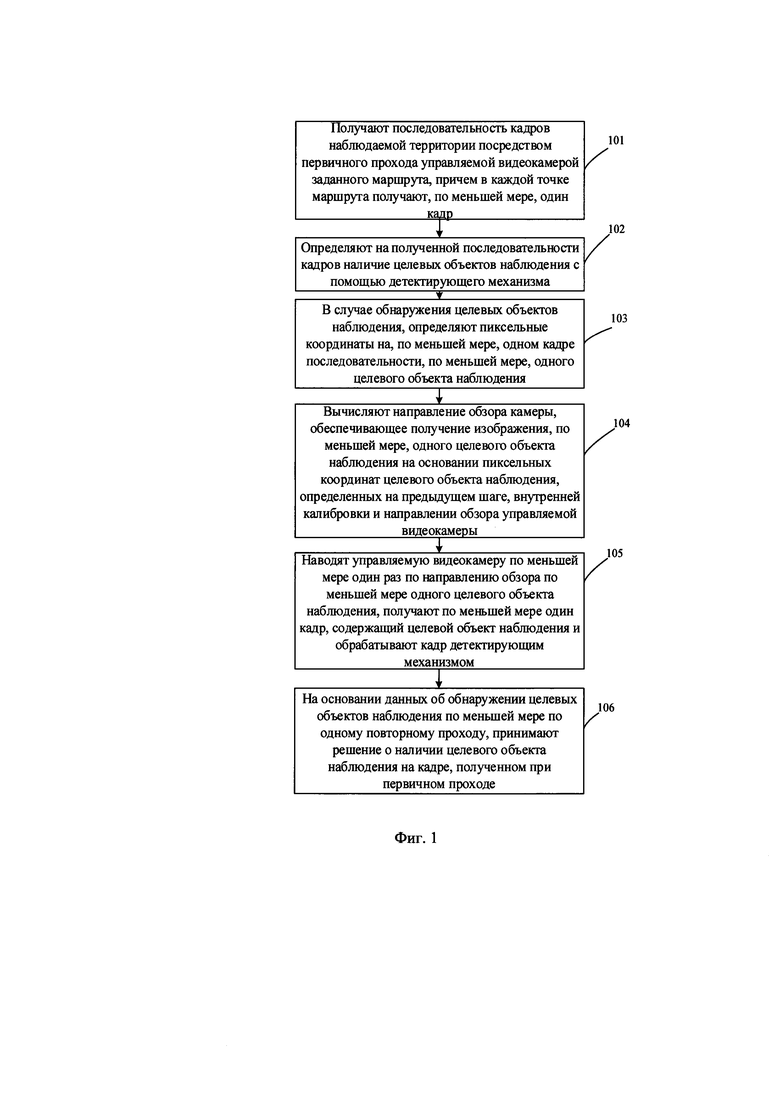
[00023] На Фиг. 1 показан пример осуществления способа мониторинга территории с помощью управляемой видеокамеры.
[00024] На Фиг. 2 показана последовательность кадров, которая получена посредством первичного обхода камеры.
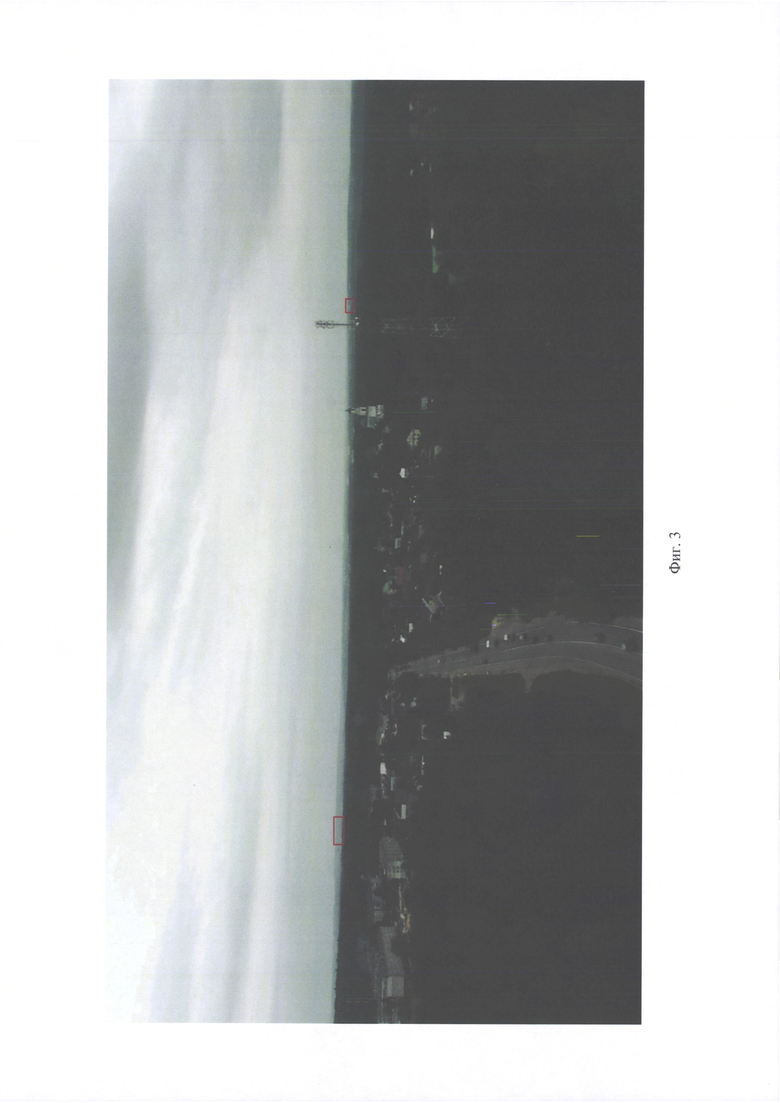
[00025] На Фиг. 3 показан пример осуществления, в котором детектирующим механизмом выявлены два целевых объекта наблюдения.
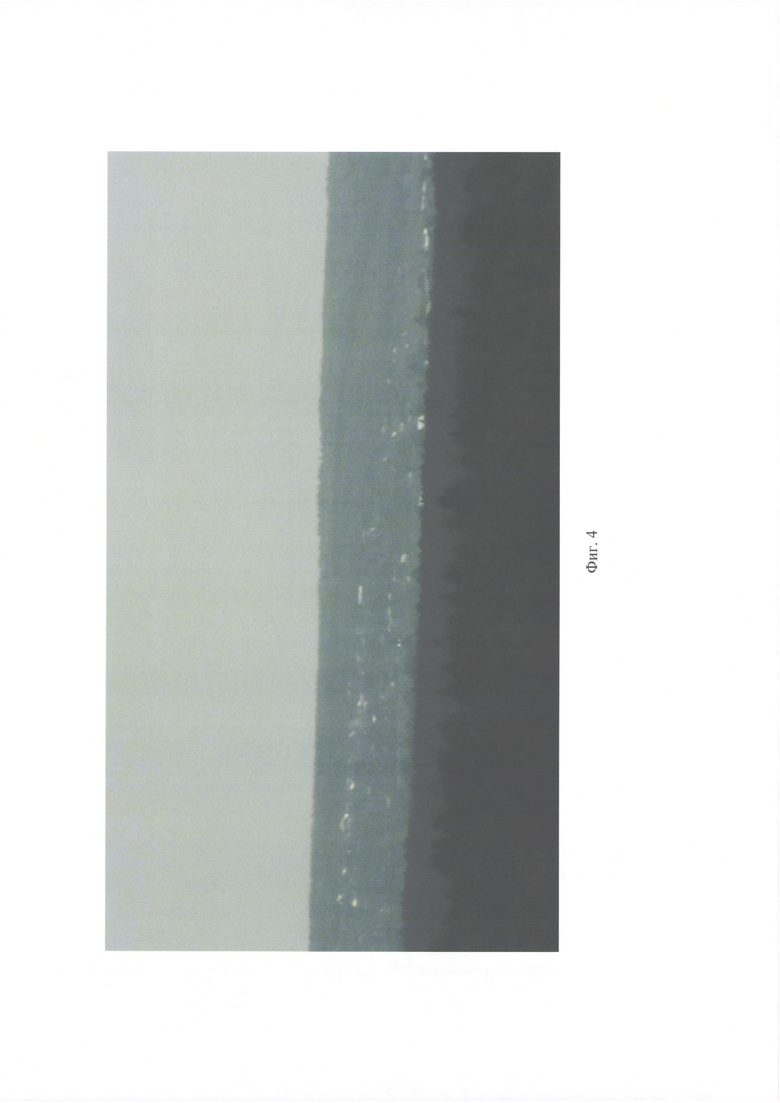
[00026] На Фиг. 4 показан пример осуществления, в котором посредством детектирующего механизма не выявляется целевой объект наблюдения.
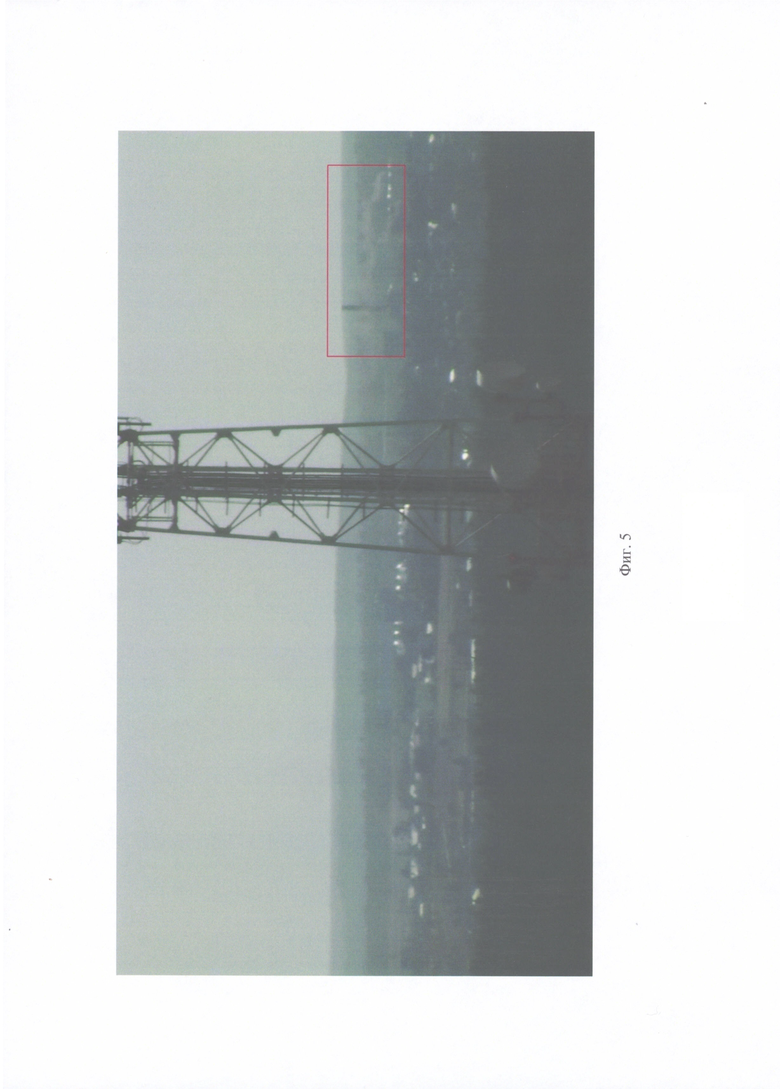
[00027] На Фиг. 5 показан пример осуществления, в котором посредством детектирующего механизма выявляется целевой объект наблюдения.
ПОДРОБНОЕ РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[00028] Ниже будут описаны понятия и определения, необходимые для подробного раскрытия осуществляемого технического решения.
[00029] Техническое решение может быть реализовано в виде распределенной компьютерной системы.
[00030] В данном решении под системой подразумевается компьютерная система, ЭВМ (электронно-вычислительная машина), ЧПУ (числовое программное управление), ПЛК (программируемый логический контроллер), компьютеризированные системы управления и любые другие устройства, способные выполнять заданную, четко определенную последовательность операций (действий, инструкций).
[00031] Под устройством обработки команд подразумевается электронный блок либо интегральная схема (микропроцессор), исполняющая машинные инструкции (программы).
[00032] Устройство обработки команд считывает и выполняет машинные инструкции (программы) с одного или более устройства хранения данных. В роли устройства хранения данных могут выступать, но, не ограничиваясь, жесткие диски (HDD), флеш-память, ПЗУ (постоянное запоминающее устройство), твердотельные накопители (SSD), оптические носители (CD, DVD и т.п.).
[00033] Программа - последовательность инструкций, предназначенных для исполнения устройством управления вычислительной машины или устройством обработки команд.
[00034] Детектирующий механизм - это комплекс мер, направленных на выявление целевого объекта в полученной последовательности кадров, причем в качестве детектирующего механизма может использоваться алгоритм компьютерного зрения или программно-аппаратный комплекс.
[00035] Обнаружительная способность - комплексная характеристика системы или детектирующего механизма, которая определяется тем, что увеличение обнаружительной способности - это один из представленных ниже вариантов или их комбинация
a) уменьшение вероятности пропуска цели при сохранении вероятности ложных тревог,
b) уменьшение вероятности ложной тревоги при сохранении вероятности пропуска цели,
c) одновременное уменьшение вероятности пропуска целевого объекта наблюдения и вероятности ложной тревоги,
d) изменение вероятности ложной тревоги и пропуска целевого объекта наблюдения, повышающее эффективность решения конкретной задачи.
[00036] Кадр – данные, получаемые с матрицы, набор точек (пикселей), каждой их которых присвоена характеристика (яркость) или несколько характеристик (яркость, цветовые компоненты).
[00037] Калибровка камеры (калибровочные характеристики камеры) - математическая модель и ее параметры, которые позволяют связать пиксель изображения и направление прихода оптического луча (направление наблюдения) для данного пикселя.
[00038] Управляемая видеокамера - камера, которая поддерживает удаленное управление направлением (зачастую углом направления обзора по вертикали и горизонтали) и зумом.
[00039] Маршрут обхода управляемой камеры - последовательность точек, характеризующих направление обзора (вертикальный, горизонтальный) и приближения, в каждой из точек которой получают фото или видеоданные интересующей территории или объекта.
[00040] Целевой объект наблюдения - объект, на обнаружение которого рассчитан данный способ и данная система, например, в случае лесных пожаров, данным объектом может являться дым.
[00041] Разрешение - величина, определяющая количество точек (элементов растрового изображения) на единицу площади (или единицу длины).
[00042] Фиг. 1 представляет собой блок-схему, показывающую способ мониторинга территории с помощью управляемой видеокамеры, который содержит следующие шаги:
[00043] Шаг 101: получают последовательность кадров наблюдаемой территории посредством первичного прохода управляемой видеокамерой заданного маршрута, причем в каждой точке маршрута получают, по меньшей мере, один кадр.
[00044] На данном шаге получают по меньшей мере в одной точке по меньшей мере один кадр. От первичного прохода управляемой видеокамерой заданного маршрута зависит обнаружительная способность, т.е. если получают большое количество кадров, то можно понизить вероятность ложной тревоги и понизить вероятность пропуска цели.
[00045] В примерном варианте осуществления, предварительно управляемая видеокамера проходит маршрут обхода на высокой скорости с минимально допустимыми характеристиками детектирующего механизма (например, с низкими порогами срабатывания). На Фиг. 2 показана последовательность кадров, которая получена посредством первичного обхода камеры, на высокой скорости с минимально допустимыми порогами срабатывания детектирующего механизма, которая проходит маршрут наблюдения с достаточно малым заданным приближением (широким углом обзора). За счет высокой скорости обхода маршрута, управляемая видеокамера может пройти по маршруту за небольшое количество точек маршрута (например, чтобы определить оптимальное количество точек маршрута, необходимо 360 градусов разделить на ширину обзора камеры).
[00046] Шаг 102: на полученной последовательности кадров с помощью детектирующего механизма определяют наличие целевых объектов наблюдения.
[00047] После получения последовательности кадров наблюдаемой территории к упомянутым кадрам применяют детектирующий механизм. Например, на одном из кадров, который был получен на предыдущем шаге, по азимуту 173,045 градуса, углу места - 2,348 градуса, с обзором управляемой видеокамеры 52,7×31,5 градуса (разрешение изображения и видеоданных 1920×1080) детектирующим механизмом с минимально допустимыми порогами срабатывания был обнаружен целевой объект наблюдения. В качестве детектирующего механизма могут использоваться различные способы, очевидные для специалиста в уровне техники, например, сегментация пламени и дыма и/или обнаружение движущихся областей и/или анализ пространственных изменений яркости, не ограничиваясь. Целевые объекты наблюдения показаны на Фиг. 3 и выделены четырехугольниками.
[00048] Каждый детектирующий механизм, обеспечивающий обнаружение и идентификацию каких-либо объектов, имеет множество конфигурируемых параметров, влияющих на качество обнаружения механизмом целевых объектов. Эти параметры могут изменяться в процессе работы и зависят от условий применений механизма. Таким образом, детектирующий механизм является настраиваемым. Параметры обнаружения зависят от таких настроек нетривиальным образом.
[00049] В качестве детектирующего механизма могут использоваться алгоритмы выявления объектов, описанные в источнике информации [1]. В качестве примера, но не ограничиваясь, могут использоваться способы обнаружения и выделения объектов на основе временной фильтрации, которые дополнительно используют информацию, получаемую в предыдущих кадрах. Эффективность таких методов, безусловно, выше, чем у методов, использующих при обнаружении только априорную информацию о пространственных и статистических свойствах фона и объекта. При обходе управляемой камеры по маршруту на высокой скорости и обработке полученных кадров детектирующим механизмом с минимально допустимыми порогами чувствительности возникает достаточно высокая вероятность обнаружения объекта, но и вероятность ложных срабатываний так же увеличивается.
[00050] Параметры осмотра территории могут варьироваться различными способами. Например, можно варьировать последовательность настроек детектирующего механизма и приближений видеокамеры. Можно варьировать времена наблюдения конкретной точки маршрута. Также возможна ситуация, когда одновременно варьируются настройки детектирующего механизма, приближения видеокамеры и время наблюдения конкретной точки маршрута (или количество кадров, полученное в конкретной точке маршрута).
[00051] Шаг 103: в случае обнаружения целевых объектов наблюдения, определяют пиксельные координаты на, по меньшей мере, одном кадре последовательности, по меньшей мере, одного целевого объекта наблюдения.
[00052] В указанном примерном варианте осуществления обнаруженные объекты имеют следующие координаты: первый объект х=393, y=470 (пиксельные координаты от левого верхнего угла), второй объект х=1461, y=491.
[00053] Шаг 104: вычисляют направление обзора камеры, обеспечивающее получение изображения, по меньшей мере, одного целевого объекта наблюдения на основании пиксельных координат целевого объекта наблюдения, определенных на предыдущем шаге, внутренней калибровки и ориентации управляемой видеокамеры.
[00054] После прохождения маршрута обхода управляемой видеокамерой, определяют направление обзора камеры и пиксельные координаты на кадре, по которым необходимо направить видеокамеру, исходя из внутренней калибровки видеокамеры и ориентации управляемой видеокамеры, на которой были обнаружены объекты, и отправляют управляемую видеокамеру выполнить кадр по этим координатам с увеличенным приближением. Причем степень увеличения приближения может задаваться как изначально (например, с заданным коэффициентом увеличения), так и исходя из ограничений и возможностей управляемой видеокамеры.
[00055] Для указанного примерного варианта осуществления калибровочная характеристика может быть задана разрешением картинки и углами обзора по горизонтали и вертикали 52,7×31,5 градуса (разрешение изображения 1920×1080). На основе калибровочной характеристики и пиксельных координат объекта на изображении могут быть рассчитаны углы расположения объекта относительно оптического центра камеры (Фиг. 3), которые будут равны, для первого объекта -15 градусов (левее центра), а для второго объекта 2 градуса (выше центра).
[00056] Для определения углов направления обзора камеры можно прибавить полученные углы к направлению обзора камеры, в котором получено данное изображение (азимуту 173,045 градуса, углу места - 2,348 градуса), или выбрать такие направления, чтобы полученный объект оказался в кадре, а именно азимут = 156,29, угол места = -0,016 (обзор камеры 2,91×1,64 градуса) для первой точки, азимут 168,16 и углом места, равным -0,337, соответственно, для второй.
[00057] Шаг 105: наводят управляемую видеокамеру по меньшей мере один раз по направлению обзора по меньшей мере одного целевого объекта наблюдения, получают по меньшей мере один кадр, содержащий целевой объект наблюдения, и обрабатывают кадр детектирующим механизмом.
[00058] В примере осуществления наводят управляемую видеокамеру сначала по координатам и направлению первого четырехугольника (Фиг. 3) с максимальным возможным приближением: азимут = 156,29, угол места = -0,016 (обзор камеры 2,91×1,64 градуса), после чего получают кадр на заданном приближении.
[00059] В примере осуществления вследствие повторной работы детектирующего механизма выясняется, что на выполненном кадре по заданным координатам целевого объекта обнаружения нет. Тогда механизм может быть настроен с меньшими порогами чувствительности (минимально допустимыми характеристиками детектирующего механизма). Если и теперь выясняется, что на выполненном кадре по заданным координатам целевого объекта обнаружения нет, то принимается решение, что целевой объект наблюдения отсутствует (см. Фиг. 4).
[00060] Далее в примере осуществления наводят управляемую видеокамеру по координатам и направлению второго четырехугольника с максимально возможным приближением, углом азимута, равным 168,16, и углом места, равным -0,337 соответственно. В данном четырехугольнике детектирующим механизмом был обнаружен дым.
[00061] Кроме того, надежность обнаружения объектов может быть изменена следующими способами:
[00062] - увеличением приближения - в этом случае обнаруживаемый целевой объект становится больше, его движения и перемещения лучше различимы, то есть повышается вероятность обнаружения;
[00063] - увеличением времени наблюдения в конкретной точке пространства наблюдения - в этом случае есть возможность использовать детектирующие механизмы, использующие накопление, тогда вероятность обнаружения объекта возрастает.
[00064] Могут быть найдены оптимальные конфигурации механизма, обеспечивающие сохранение надежности обнаружения, без увеличения вероятности ложных срабатываний, при минимальном времени осмотра.
[00065] Шаг 106: на основании данных об обнаружении целевых объектов наблюдения по меньшей мере по одному повторному проходу, принимают решение о наличии целевого объекта наблюдения на кадре, полученном при первичном проходе.
[00066] Выявленный целевой объект наблюдения показан на Фиг. 5.
[00067] В некоторых вариантах осуществления, заявленный способ выполняется на системе мониторинга территории с помощью управляемой видеокамеры.
[00068] В одном из вариантов реализации, данное техническое решение может быть выполнено в виде системы мониторинга территории с помощью управляемой видеокамеры, включающей: управляемую видеокамеру, одно или более устройств обработки данных, одно или более устройств хранения данных, одну или более программ, где одна или более программ хранятся на одном или более устройстве хранения данных и исполняются на одном и более устройстве обработки данных, причем одна или более программ включает следующие инструкции: получают последовательность кадров наблюдаемой территории посредством первичного прохода управляемой видеокамерой заданного маршрута, причем в каждой точке маршрута получают, по меньшей мере, один кадр; определяют на полученной последовательности кадров наличие целевых объектов наблюдения с помощью детектирующего механизма; в случае обнаружения целевых объектов наблюдения, определяют пиксельные координаты на, по меньшей мере, одном кадре последовательности, по меньшей мере, одного целевого объекта наблюдения; вычисляют направление обзора камеры, обеспечивающее получение изображения, по меньшей мере, одного целевого объекта наблюдения на основании пиксельных координат целевого объекта наблюдения, определенных на предыдущем шаге, внутренней калибровки и направлении обзора управляемой видеокамеры; наводят управляемую камеру по меньшей мере один раз по направлению обзора по меньшей мере одного целевого объекта наблюдения, получают по меньшей мере один кадр, содержащий целевой объект наблюдения, и обрабатывают кадр детектирующим механизмом; на основании данных об обнаружении целевых объектов наблюдения по меньшей мере по одному повторному проходу, принимают решение о наличии целевого объекта наблюдения на кадре, полученном при первичном проходе.
[00069] В некоторых вариантах реализации указанный способ реализуется физически на камере.
[00070] Система может быть реализована с помощью мобильного телефона, персонального или портативного компьютера или с помощью иного вычислительного средства, пригодного для выполнения необходимых программно-логических функций.
[00071] Система может включать один или более следующих компонент: компонент обработки, управляемую камеру, память, компонент питания, компонент мультимедиа, интерфейс ввода / вывода (I/О), сенсорный компонент, компонент передачи данных.
[00072] В некоторых вариантах, компонент обработки в основном управляет всеми операциями системы, например, дисплеем, передачей данных, работой видеокамеры и операцией записи. Компонент обработки может включать в себя один или более процессоров, реализующих инструкции для завершения всех или части шагов из указанных выше способов. Кроме того, компонент обработки может включать в себя один или более модулей для удобного процесса взаимодействия между компонентом обработки и другими компонентами. Например, компонент обработки может включать в себя мультимедийный модуль для удобного облегченного взаимодействия между компонентом мультимедиа и компонентом обработки.
[00073] Память выполнена с возможностью хранения различных типов данных для поддержки работы системы. Примеры таких данных включают в себя инструкции из любого приложения или способа, изображения, видео и т.д. Память может быть реализована в виде любого типа энергозависимого запоминающего устройства, энергонезависимого запоминающего устройства или их комбинации, например, Статического Оперативного Запоминающего Устройства (СОЗУ), Электрически Стираемого Программируемого Постоянного Запоминающего Устройства (ЭСППЗУ), Стираемого Программируемого Постоянного Запоминающего Устройства (СППЗУ), Программируемого Постоянного Запоминающего Устройства (ППЗУ), Постоянного Запоминающего Устройства (ПЗУ), магнитной памяти, флэш-памяти, магнитного или оптического диска.
[00074] В некоторых вариантах, компонент питания обеспечивает электричеством различные компоненты системы. Компонент питания может включать систему управления электропитанием, один или более источник питания и другие узлы для генерации, управления и распределения электроэнергии к системе.
[00075] В некоторых вариантах, мультимедийный компонент включает в себя экран, обеспечивающий выходной интерфейс между системой и пользователем. В некоторых вариантах осуществления, экран может быть жидкокристаллическим дисплеем (ЖКД) или сенсорной панелью (СП). Если экран включает в себя сенсорную панель, экран может быть реализован в виде сенсорного экрана для приема входного сигнала от пользователя. Сенсорная панель включает один или более сенсорных датчиков в смысле жестов, прикосновения и скольжения сенсорной панели. Сенсорный датчик может не только чувствовать прикосновение или жест перелистывания, но и определять длительность времени и давления, связанных с режимом работы прикосновения и скольжения.
[00076] Интерфейс ввода/вывода обеспечивает интерфейс между компонентом обработки и периферийным интерфейсным модулем.
[00077] Сенсорный компонент содержит один или более сенсоров и выполнен с возможностью обеспечения различных аспектов оценки состояния системы. Например, сенсорный компонент может обнаружить состояния вкл./выкл. системы, относительное расположение компонентов, например, дисплея и кнопочной панели системы, изменение положения системы или одного компонента системы, наличие или отсутствие контакта между пользователем и системой, а также ориентацию или ускорение/замедление системы. Сенсорный компонент содержит бесконтактный датчик, выполненный с возможностью обнаружения присутствия объекта, находящегося поблизости, когда нет физического контакта. Сенсорный компонент содержит оптический датчик (например, КМОП или ПЗС-датчик изображения), выполненный с возможностью использования в визуализации приложения. В некоторых вариантах сенсорный компонент содержит датчик ускорения, гироскоп, магнитный датчик, датчик давления или датчик температуры.
[00078] Коммуникационный компонент (компонент передачи данных) выполнен с возможностью облегчения проводной или беспроводной связи между системой и другими устройствами. Система может получить доступ к беспроводной сети на основе стандартов связи, но не ограничиваясь, таких как WiFi, 2G или 3G, или их комбинации. В одном примерном варианте компонент передачи данных получает широковещательный сигнал или трансляцию, связанную с ними информацию из внешней широковещательной системы управления через широковещательный канал. В одном варианте осуществления компонент передачи данных содержит модуль коммуникации ближнего поля (NFC), чтобы облегчить ближнюю связь, или модуль для радиочастотной идентификации (RFID), модуль передачи данных в инфракрасном диапазоне (IrDA), или сверхширокополосной (UWB) технологии, либо модуль Bluetooth (ВТ) или иное средство, пригодное для беспроводной передачи данных.
[00079] В примерном варианте осуществления, память включает инструкции, которые выполняются процессором системы для реализации описанных выше способов повышения надежности обнаружения целевого объекта наблюдения. Например, энергонезависимым компьютерно-читаемым носителем может быть ПЗУ, оперативное запоминающее устройство (ОЗУ), компакт-диск, магнитная лента, дискеты, оптические устройства хранения данных и тому подобное.
Источник информации
Форсайт Д.А., Понс Д. Компьютерное зрение. Современный подход = Computer Vision: A Modern Approach // М.: Вильяме. – 2004.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОЙ КОНФИГУРАЦИИ СИСТЕМЫ ВИДЕОМОНИТОРИНГА ЛЕСА | 2013 |
|
RU2561925C2 |
| СПОСОБ РАСПОЗНАВАНИЯ ПРИРОДНЫХ ПОЖАРОВ В ПРИГОРИЗОНТНЫХ ОБЛАСТЯХ | 2017 |
|
RU2650347C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ МОНИТОРИНГА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2504014C1 |
| СПОСОБ ПОЛУЧЕНИЯ ФОТО- ИЛИ ВИДЕОИЗОБРАЖЕНИЯ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ОБЪЕКТА СЪЕМКИ | 2015 |
|
RU2671551C2 |
| Корпоративный телемедицинский комплекс для предупреждения эпидемических чрезвычайных ситуаций | 2020 |
|
RU2735400C1 |
| СПОСОБ МОНИТОРИНГА ЛЕСНЫХ ПОЖАРОВ И КОМПЛЕКСНАЯ СИСТЕМА РАННЕГО ОБНАРУЖЕНИЯ ЛЕСНЫХ ПОЖАРОВ, ПОСТРОЕННАЯ НА ПРИНЦИПЕ РАЗНОСЕНСОРНОГО ПАНОРАМНОГО ОБЗОРА МЕСТНОСТИ С ФУНКЦИЕЙ ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ ОЧАГА ВОЗГОРАНИЯ | 2011 |
|
RU2486594C2 |
| СИСТЕМА И СПОСОБ ВИДЕОМОНИТОРИНГА ЛЕСА | 2011 |
|
RU2458407C1 |
| Роботизированный комплекс охраны объектов строительства. | 2021 |
|
RU2762514C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТА ПРИ ПОМОЩИ КАМЕРЫ (ВАРИАНТЫ) | 2014 |
|
RU2602729C2 |
| РАСПРЕДЕЛЕННАЯ АРХИТЕКТУРА СИСТЕМЫ ВИДЕОМОНИТОРИНГА ЛЕСА | 2013 |
|
RU2554102C2 |

Изобретение относится к системам мониторинга территории с использованием управляемой видеокамеры. Технический результат заключается в повышении надежности обнаружения целевого объекта наблюдения. Предложен способ мониторинга территории, включающий этапы: прием кадров наблюдаемой территории посредством первичного прохода управляемой видеокамерой заданного маршрута, причем в каждой точке маршрута получают по меньшей мере один кадр; с помощью детектирующего механизма определяют на кадрах наличие целевых объектов наблюдения; в случае обнаружения целевых объектов наблюдения, определяют пиксельные координаты на по меньшей мере одном кадре по меньшей мере одного целевого объекта наблюдения; вычисляют направление обзора камеры, обеспечивающее получение изображения по меньшей мере одного целевого объекта наблюдения на основании пиксельных координат целевого объекта наблюдения, определенных на предыдущем шаге, внутренней калибровки и направлении обзора управляемой видеокамеры; наводят управляемую камеру по меньшей мере один раз по направлению обзора по меньшей мере одного целевого объекта наблюдения, получают по меньшей мере один кадр, содержащий целевой объект наблюдения, и обрабатывают кадр детектирующим механизмом; на основании данных об обнаружении целевых объектов наблюдения по меньшей мере по одному повторному проходу, принимают решение о наличии целевого объекта наблюдения в кадре, полученном при первичном проходе. 2 н. и 7 з.п. ф-лы, 5 ил.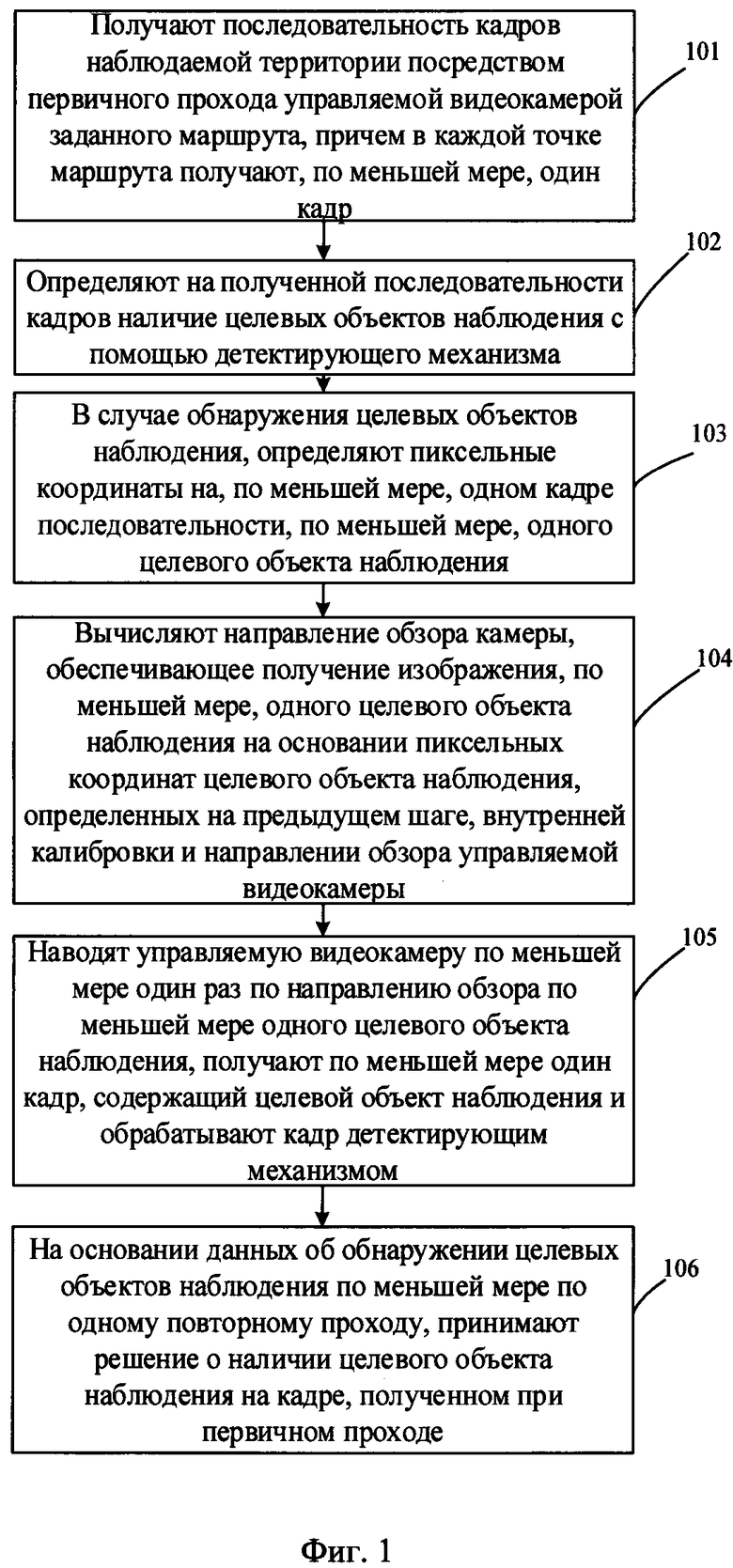
1. Способ мониторинга территории с помощью управляемой видеокамеры, содержащий этапы, на которых:
 получают последовательность кадров наблюдаемой территории посредством первичного прохода управляемой видеокамерой заданного маршрута, причем в каждой точке маршрута получают по меньшей мере один кадр;
получают последовательность кадров наблюдаемой территории посредством первичного прохода управляемой видеокамерой заданного маршрута, причем в каждой точке маршрута получают по меньшей мере один кадр;
с помощью детектирующего механизма на полученной последовательности кадров определяют наличие целевых объектов наблюдения;
в случае обнаружения целевых объектов наблюдения, определяют пиксельные координаты на по меньшей мере одном кадре последовательности по меньшей мере одного целевого объекта наблюдения;
вычисляют направление обзора видеокамеры, обеспечивающее получение изображения по меньшей мере одного целевого объекта наблюдения на основании пиксельных координат целевого объекта наблюдения, определенных на предыдущем шаге, внутренней калибровки и направлении обзора управляемой видеокамеры;
наводят управляемую видеокамеру по меньшей мере один раз по определенному на предыдущем шаге направлению обзора по меньшей мере одного целевого объекта наблюдения, получают по меньшей мере один кадр, содержащий целевой объект наблюдения, и обрабатывают кадр детектирующим механизмом;
на основании данных об обнаружении целевых объектов наблюдения по меньшей мере по одному повторному проходу маршрута первичного прохода, принимают решение о наличии целевого объекта наблюдения на кадре, полученном при первичном проходе.
2. Способ по п 1, характеризующийся тем, что детектирующим механизмом является алгоритм компьютерного зрения.
3. Способ по п 1, характеризующийся тем, что детектирующим механизмом является программно-аппаратный комплекс.
4. Способ по п 1, характеризующийся тем, что при повторном проходе получают количество кадров большее, чем при первом проходе.
5. Способ по п 1, характеризующийся тем, что получают более одного кадра в каждой точке съемке, а при повторном проходе увеличивают интервал времени между кадрами.
6. Способ по п 1, характеризующийся тем, что при повторном проходе увеличивают приближение камеры.
7. Способ по п 1, характеризующийся тем, что изменяют обнаружительную способность с помощью конфигурирования параметров детектирующего механизма.
8. Способ по п 1, характеризующийся тем, что параметром детектирующего механизма является порог чувствительности.
9. Система мониторинга территории с помощью управляемой видеокамеры включает:
управляемую видеокамеру;
одно или более устройств обработки данных;
одно или более устройств хранения данных;
одну или более программ,
где одна или более программ хранятся на одном или более устройстве хранения данных и исполняются на одном и более устройстве обработки данных, причем одна или более программ включает инструкции, которые при их выполнении на по меньшей мере одном устройстве обработки данных позволяют:
 осуществлять получение последовательности кадров наблюдаемой территории посредством первичного прохода управляемой видеокамерой заданного маршрута, причем в каждой точке маршрута получаю, по меньшей мере один кадр;
осуществлять получение последовательности кадров наблюдаемой территории посредством первичного прохода управляемой видеокамерой заданного маршрута, причем в каждой точке маршрута получаю, по меньшей мере один кадр;
осуществлять определение на полученной последовательности кадров наличия целевых объектов наблюдения с помощью детектирующего механизма;
в случае обнаружения целевых объектов наблюдения, осуществлять определение пиксельных координат на по меньшей мере одном кадре последовательности по меньшей мере одного целевого объекта наблюдения;
осуществлять вычисление направления обзора видеокамеры, обеспечивающего получение изображения по меньшей мере одного целевого объекта наблюдения на основании пиксельных координат целевого объекта наблюдения, определенных на предыдущем шаге, внутренней калибровки и направлении обзора управляемой видеокамеры;
осуществлять наведение управляемой видеокамеры по меньшей мере один раз по определенному на предыдущем шаге направлению обзора по меньшей мере одного целевого объекта наблюдения и получение по меньшей мере одного кадра, содержащего целевой объект наблюдения, и выполнять обработку упомянутого кадра детектирующим механизмом;
на основании данных об обнаружении целевых объектов наблюдения по меньшей мере по одному повторному проходу маршрута первичного прохода, осуществлять принятие решения о наличии целевого объекта наблюдения на кадре, полученном при первичном проходе.
| US 2007291104 A1, 2007-12-20 | |||
| US 2005104958 A1, 2005-05-19 | |||
| US 2009315996 A1, 2009-12-24 | |||
| EP 3024227 A1, 2016-05-25 | |||
| US 2009251539 A1, 2009-10-08 | |||
| US 2014267706 A1, 2014-09-18 | |||
| RU 2008112164 A, 2009-10-20. |

