Перекрестная ссылка на родственную заявку
[0001] Настоящая заявка испрашивает приоритет согласно предварительной патентной заявке США с номером 62/250,970, поданной 4 ноября 2015 года, озаглавленной «Methods and Systems for Characterizing Responses in a Drilling System», и в заявке на патент США с номером 14/983,121, поданной 29 декабря 2015 года, озаглавленной «Characterizing Responses in a Drilling System». Эти приоритетные патентные заявки полностью включены в настоящее описание посредством ссылки.
Уровень техники
[0002] В отрасли разведки залежей углеводородов модели физического отклика буровой системы могут быть использованы на этапе планирования операции бурения. Операция бурения включает три отдельные механические операции на поверхности, а именно закачивание бурового раствора, вращение трубы и перемещение талевого блока. Каждая из механических операций на поверхности связана с силовым аспектом: давлением перекачиваемой текучей среды, крутящим моментом для вращения бурильной колонны и нагрузкой на крюк при подвешивании бурильной колонны в скважине. Ручные операции могут быть выполнены на этапе бурения для охарактеризования отклика буровой системы. Кроме того, ручные операции могут быть выполнены для облегчения калибровки модели, которую затем используют для выбора параметров бурения и выявления аномальной тенденции. Примеры ручных операций могут включать: выполнение пробного бурения в ручном режиме, при котором записывают скорость проходки («ROP») и момент вращения долота в забое скважины при различных комбинациях нагрузки на долото («WOB») и числа оборотов в минуту («RPM»); ручное прокачивание на некотором расстоянии от забоя при различных скоростях для калибровки гидравлической модели; ручное поднятие, спуск и поворачивание грузов в соответствии с заданной последовательностью калибровки крутящего момента и модели сопротивления среды.
[0003] С появлением автоматизированного бурения по меньшей мере частью процесса бурения можно управлять с помощью компьютера, например, «установки автоматического бурения». Однако отсутствуют какие-либо способы или системы, которые автоматически группируют операции для охарактеризования отклика буровой системы во время выполнения операций бурения.
Раскрытие сущности изобретения
[0004] Варианты осуществления настоящего изобретения могут включать способ. Способ может включать определение по меньшей мере одной автоматизированной последовательности, подлежащей выполнению во время осуществления части операции бурения с помощью буровой системы. По меньшей мере одна автоматизированная последовательность может включать выполнение одного или более действий, вызывающих отклик в буровой системе. Способ также может включать выполнение во время операции бурения по меньшей мере одной автоматизированной последовательности. Кроме того, способ может включать измерение во время выполнения по меньшей мере одной автоматизированной последовательности одного или более откликов в буровой системе. Один или более откликов могут быть измерены в стволе скважины, в котором осуществляют операции бурения, и на поверхности ствола скважины. Способ может включать изменение модели буровой системы на основании по меньшей мере части одного или более откликов, которые были измерены во время выполнения по меньшей мере одной автоматизированной последовательности.
[0005] В одном варианте осуществления способ может также включать изменение одного или более рабочих параметров операций бурения на основании, по меньшей мере частично, одного или более откликов в буровой системе.
[0006] В одном варианте осуществления один или более рабочих параметров могут включать расход бурового раствора, частоту вращения бурильной колонны, движение узла нижней части бурильной колонны и пределы безопасности буровой системы.
[0007] В одном варианте осуществления один или более откликов могут быть измерены с помощью датчиков, расположенных в одном или более местоположений, включая расположение на поверхности буровой системы, расположение в стволе скважины, расположение на бурильной колонне и расположение в узле нижней части бурильной колонны.
[0008] В одном варианте осуществления по меньшей мере одна автоматизированная последовательность включает одну или более из следующих последовательностей: последовательность отрыва и поднятия от забоя, спуска и задания крутящего момента при различных скоростях; последовательность для прекращения расхода и остановки вращения в конце наращивания бурильной колонны, а также увеличения расхода и числа оборотов в минуту в начале наращивания бурильной колонны; последовательность перемещения блока вверх и вниз для охарактеризования трения на шкиве талевого блока и исключения влияния на вычисления нагрузки на долото (WOB) и нагрузки на крюк; последовательность для охарактеризования взаимосвязей между одним или более рабочих параметров и колебаниями узла нижней части бурильной колонны (BHA) во время осуществления операций бурения; последовательность, в которой система slider циклизирует крутящий момент для улучшения передачи нагрузки и управления положением отклонителя с помощью скважинной обратной связи в виде положения отклонителя BHA; последовательность контроля изменения нагрузки на крюк на поверхности в диапазоне циркуляционного расхода при вращении на некотором расстоянии от забоя; последовательность ступенчатого увеличения нагрузки на долото (WOB) при постоянном числе оборотов минуту для определения точки, в которой система обеспечения вращения начинает работать неустойчиво и входит в установившийся режим прерывистого перемещения; последовательность, которая развертывается в диапазоне значений числа оборотов минуту на поверхности на некотором расстоянии от забоя для определения местоположения резонансов изгибных колебаний BHA; последовательность, которая инициирует накачивание бурового раствора при различных значениях расхода; последовательность, которая инициирует динамическую настройку коэффициента усиления установки автоматического бурения на основании полученной модели взаимодействий шарошечного долота в режиме реального времени; последовательность, которая автоматически модулирует частоту хода поршня бурового насоса; последовательность, которая инициирует изменение нагрузки при бурении с помощью двигателя и вращении, а также измерение давления; последовательность, которая инициирует изменение расхода и измерение частоты вращения двигателя; последовательность, которая инициирует изменение расхода и нагрузки на долото (WOB) и измерение частоты вращения двигателя и давления; последовательность, которая инициирует изменение по меньшей мере одного из частоты вращения или расхода и измерение температуры вдоль бурильной колонны; и последовательность, которая инициирует перемещение блока с различными скоростями.
[0009] В одном варианте осуществления способ может также включать сохранение одного или более откликов в буровой системе.
[0010] В одном варианте осуществления способ может также включать определение перед выполнением по меньшей мере одной автоматизированной последовательности того, чтобы для по меньшей мере одной автоматизированной последовательности требовалось обновление, основанное по меньшей мере частично на изменении условий в операции бурения. Кроме того, способ может включать обновление по меньшей мере одной автоматизированной последовательности в ответ на изменение условий в операции бурения.
[0011] Варианты осуществления настоящего изобретения могут включать энергонезависимый считываемый компьютером носитель информации, содержащий команды, инициирующие выполнение способа с помощью одного или более процессоров. Способ может включать определение по меньшей мере одной автоматизированной последовательности, подлежащей выполнению во время осуществления части операции бурения с помощью буровой системы. По меньшей мере одна автоматизированная последовательность может включать выполнение одного или более действий, вызывающих отклик в буровой системе. Способ также может включать выполнение во время операции бурения по меньшей мере одной автоматизированной последовательности. Кроме того, способ может включать измерение во время выполнения по меньшей мере одной автоматизированной последовательности одного или более откликов в буровой системе. Один или более откликов могут быть измерены в стволе скважины, в котором осуществляют операции бурения, и на поверхности ствола скважины. Способ может включать изменение модели буровой системы на основании по меньшей мере части одного или более откликов, которые были измерены во время выполнения по меньшей мере одной автоматизированной последовательности.
[0012] Варианты осуществления настоящего изобретения могут включать систему. Система может включать одно или более запоминающих устройств, хранящих команды. Кроме того, система может содержать один или более процессоров, подключенных к одному или более запоминающим устройствам, и может выполнять команды для осуществления способа. Способ может включать определение по меньшей мере одной автоматизированной последовательности, подлежащей выполнению во время осуществления части операции бурения с помощью буровой системы. По меньшей мере одна автоматизированная последовательность может включать выполнение одного или более действий, вызывающих отклик в буровой системе. Способ также может включать выполнение во время операции бурения по меньшей мере одной автоматизированной последовательности. Кроме того, способ может включать измерение во время выполнения по меньшей мере одной автоматизированной последовательности одного или более откликов в буровой системе. Один или более откликов могут быть измерены в стволе скважины, в котором осуществляют операции бурения, и на поверхности ствола скважины. Способ может включать изменение модели буровой системы на основании по меньшей мере части одного или более откликов, которые были измерены во время выполнения по меньшей мере одной автоматизированной последовательности.
Краткое описание чертежей
[0013] Прилагаемые чертежи, которые включены в данное описание и являются его составной частью, иллюстрируют варианты осуществления идей настоящего изобретения и вместе с описанием служат для объяснения принципов идей настоящего изобретения. На чертежах:
[0014] На фиг. 1А и 1В представлен схематический вид буровой установки и системы управления согласно одному варианту осуществления.
[0015] На фиг. 2 представлен схематический вид буровой установки и ресурсной среды дистанционного вычисления согласно одному варианту осуществления.
[0016] На фиг. 3 представлена блок-схема способа охарактеризования откликов при осуществлении операций бурения согласно одному варианту осуществления.
[0017] На фиг. 4A, 4B, 4C, 4D, 4E, 4F и 4G представлены примеры автоматизированных последовательностей согласно одному варианту осуществления.
[0018] На фиг. 5 представлен схематический вид вычислительной системы согласно одному варианту осуществления.
Осуществление изобретения
[0019] Далее приведено подробное описание конкретных вариантов осуществления, проиллюстрированных на прилагаемых чертежах и фигурах. В нижеследующем подробном описании многочисленные конкретные детали приведены для обеспечения полного понимания настоящего изобретения. Однако для специалиста в данной области техники будет очевидно, что варианты осуществления могут быть осуществлены на практике без этих конкретных деталей. В других случаях хорошо известные способы, процедуры, компоненты, схемы и сети подробно не описаны, а большее внимание уделено аспектам вариантов осуществления.
[0020] Кроме того, следует понимать, что хотя термины первый, второй и т. д. могут быть использованы в настоящем документе для описания различных элементов, эти элементы не должны ограничиваться этими терминами. Эти термины использованы исключительно для различения элементом между собой. Например, первый объект может быть назван вторым объектом или этапом и аналогичным образом второй объект может быть назван первым объектом или этапом без отступления от объема настоящего изобретения.
[0021] Терминология, используемая в настоящем изобретении предназначена исключительно для описания конкретных вариантов осуществления и не предназначена для ограничения. В описании настоящего изобретения и прилагаемой формуле изобретения формы единственного числа «а», «an» и «the» также предполагают включение форм множественного числа, если из контекста явно не следует иное. Кроме того, следует понимать, что используемый в настоящем описании термин «и/или» относится к любым и всем возможным комбинациям одного или более соответствующих перечисленных элементов и охватывает их. Кроме того, следует понимать, что термины «включает», «включающий», «содержит» и/или «содержащий», при их применении в данном описании, указывают на наличие определенных признаков, целых чисел, этапов, операций, элементов и/или компонентов, но не исключают наличие или добавление одного или более других признаков, целых чисел, этапов, операций, элементов, компонентов и/или их групп. Кроме того в настоящем документе термин «если» в зависимости от контекста может быть истолкован со значением «когда», или «при», или «в ответ на определение», или «в ответ на обнаружение».
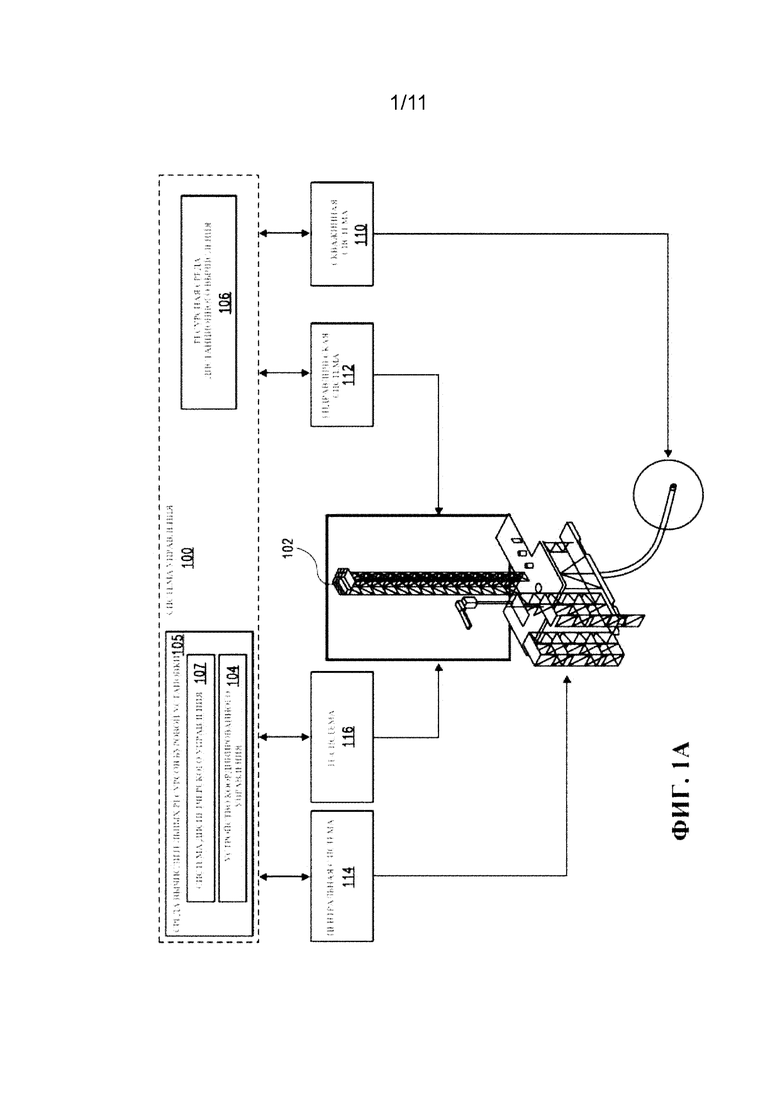
[0022] На фиг. 1А представлен концептуальный схематический вид системы 100 управления для буровой установки 102 согласно одному варианту осуществления. Система 100 управления может содержать среду 105 вычислительных ресурсов буровой установки, которая может быть расположена на площадке буровой установки 102, а в некоторых вариантах осуществления может содержать устройство 104 координированного управления. Система 100 управления может также содержать систему 107 диспетчерского управления. В некоторых вариантах осуществления система 100 управления может содержать ресурсную среду 106 дистанционного вычисления, которая может быть расположена за пределами буровой установки 102.
[0023] Ресурсная среда 106 дистанционного вычисления может содержать вычислительные ресурсы, расположенные за пределами буровой установки 102 и доступные по сети. Среда «облачных» вычислений представляет собой один из примеров ресурса дистанционного вычисления. Среда облачных вычислений может обмениваться данными со средой 105 вычислительных ресурсов буровой установки посредством сетевого соединения (например, соединения WAN или LAN). В некоторых вариантах осуществления ресурсная среда 106 дистанционного вычисления может быть по меньшей мере частично расположена на площадке, например, обеспечивая управление различными аспектами буровой установки 102 на площадке посредством ресурсной среды 105 дистанционного вычисления (например, посредством мобильных устройств). Соответственно, термин «дистанционный» не означает ограничения каким-либо конкретным расстоянием от буровой установки 102.
[0024] Кроме того, буровая установка 102 может содержать различные системы с различными датчиками и оборудованием для выполнения операций буровой установки 102, причем управление буровой установкой и контроль буровой установки может быть осуществлен посредством системы 100 управления, например, среды 105 вычислительных ресурсов буровой установки. Кроме того, среда 105 вычислительных ресурсов буровой установки может обеспечивать безопасный доступ к данным буровой установки для обеспечения контроля буровой установки с помощью пользовательских устройств на площадке и за ее пределами, передачи команд управления на буровую установку и т. п.
[0025] Различные типовые системы буровой установки 102 изображены на фиг. 1А. Например, буровая установка 102 может содержать скважинную систему 110, гидравлическую систему 112 и центральную систему 114. Эти системы 110, 112, 114 также могут представлять собой примеры «подсистем» буровой установки 102, согласно настоящему описанию. В некоторых вариантах осуществления буровая установка 102 может содержать информационно-вычислительную (IT) систему 116. Скважинная система 110 может содержать, например, узел нижней части бурильной колонны (BHA), гидравлические забойные двигатели, датчики и т. д., расположенные вдоль бурильной колонны, и/или другое буровое оборудование, выполненное с возможностью развертывания в стволе скважины. Соответственно, скважинная система 110 может относиться к инструментам, расположенным в стволе скважины, например, в виде части бурильной колонны, используемой для бурения скважины.
[0026] Гидравлическая система 112 может содержать, например, буровой раствор, насосы, клапаны, цемент, оборудование для загрузки бурового раствора, оборудование для управления буровым раствором, оборудование для управления давлением, сепараторы и другое гидравлическое оборудование. Соответственно, гидравлическая система 112 способна выполнять операции с текучей средой буровой установки 102.
[0027] Центральная система 114 может содержать подъемную и поворотную платформу, верхний привод, поворотный стол, рабочую трубу, лебедки, насосы, генераторы, оборудование подачи и укладки труб, вышку, мачту, опорное основание и другое соответствующее оборудование. Соответственно, центральная система 114 может осуществлять выработку электроэнергии, грузоподъемные операции и операции поворота буровой установки 102, а также выступать в качестве опорной платформы для бурового оборудования и площадки для работы буровой установки, например, наращивания бурильной колонны и т. д. IT-система 116 может включать программное обеспечение, компьютеры и другое IT-оборудование для осуществления IT-операций буровой установки 102.
[0028] Система 100 управления, например, посредством устройства 104 координированного управления среды 105 вычислительных ресурсов буровой установки, может контролировать датчики множества систем буровой установки 102 и передавать команды управления на множество систем буровой установки 102 таким образом, что данные датчиков от множества систем могут быть использованы для обеспечения команд управления на различные системы буровой установки 102. Например, система 100 может собирать согласованные по времени и глубине наземные данные и скважинные данные от буровой установки 102 и хранить собранные данные для доступа на площадке буровой установки 102 или за ее пределами посредством среды 105 вычислительных ресурсов буровой установки. Таким образом, система 100 может обеспечивать возможность контроля. Кроме того, система 100 управления может обеспечивать диспетчерское управление с помощью системы 107 диспетчерского управления.
[0029] В некоторых вариантах осуществления одна или более из скважинной системы 110, гидравлической системы 112 и/или центральной системы 114 могут быть изготовлены и/или могут эксплуатироваться различными компаниями. В таком варианте осуществления для некоторых систем может отсутствовать возможность унифицированного управления (например, из-за различных протоколов, ограничений на касающиеся управления полномочия, проблем безопасности для различных систем управления и т. д.). Однако один вариант осуществления системы 100 управления, которая является унифицированной, может обеспечивать управление буровой установкой 102 и связанными с ней системами (например, скважинной системой 110, гидравлической системой 112 и/или центральной системой 114 и т. д.). Кроме того, скважинная система 110 может содержать одну или множество скважинных систем. Аналогично, гидравлическая система 112 и центральная система 114 могут включать одну или множество, соответственно, гидравлических систем и центральных систем.
[0030] Кроме того, устройство 104 координированного управления может взаимодействовать с пользовательским устройством (устройствами) (например, человеко-машинным интерфейсом (человеко-машинным интерфейсами)) 118, 120. Например, устройство 104 координированного управления может принимать команды от пользовательских устройств 118, 120 и может выполнять команды с использованием двух или более систем 110, 112, 114 буровой установки, например, таким образом, что работа двух или более систем 110, 112, 114 буровой установки происходила согласованно и/или чтобы избежать возникновения нештатных условий в системах 110, 112, 114 буровой установки.
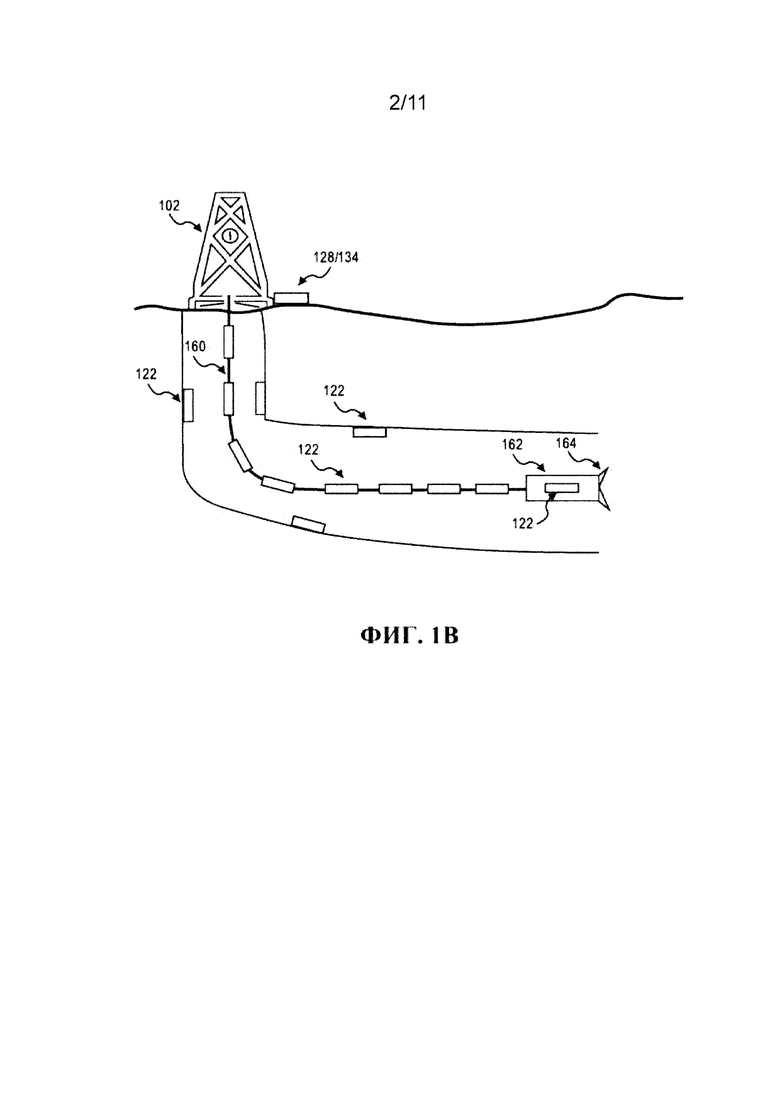
[0031] На фиг. 1В представлен более подробный пример буровой установки 102 и соответствующего оборудования, которое может быть использовано во время осуществления операций бурения. Как показано на фиг. 1В, буровая установка 102 может быть соединена с бурильной колонной 160. Буровая установка 102 может содержать оборудование для продвижения и поворота бурильной колонны 160, а также накачивания буровой текучей среды или «бурового раствора» в бурильную колонну 160, например, из гидравлической системы 112. Бурильная колонна 160 может содержать узел 162 нижней части бурильной колонны (BHA), соединенный с глубинным концом бурильной колонны 160. BHA 162 может содержать буровое долото 164. Буровое долото 164 может позволять извлекать породу из ствола скважины для создания скважины. Буровое долото 164 может приводиться в движение буровой текучей средой или буровым раствором, закачиваемым в бурильную колонну 160 буровой установкой 102. Для определения условий в стволе скважины в стволе скважины могут размещать один или более датчиков 122. Например, бурильная колонна 160 может содержать один или более датчиков 122 и BHA 162 может содержать один или более датчиков 122. Аналогично, например, один или более датчиков 122 могут быть размещены внутри самого ствола скважины, например, размещены на стенке ствола скважины, размещены на обсадной колонне ствола скважины или внутри нее и т. д. Кроме того, один или более датчиков 128 и 134 могут быть расположены на поверхности на буровой установке 102. Датчики 122, датчики 128 и датчики 134 могут быть использованы системой 100 управления для измерения и контроля рабочих параметров и откликов буровой системы во время осуществления операций бурения. Например, рабочие параметры и отклики могут включать давление в бурильной колонне 160, давление нагнетания бурового раствора, частоту вращения бурового долота, местоположение BHA 206, длину бурильной колонны 160, давление в стволе скважины, температуру в стволе скважины, расход бурового раствора и т. п. Датчики 122, датчики 128 и датчики 134 могут включать датчики температуры, датчики давления, датчики геопозиционирования, датчики ускорения, датчики поворота, датчики расхода и т. п.
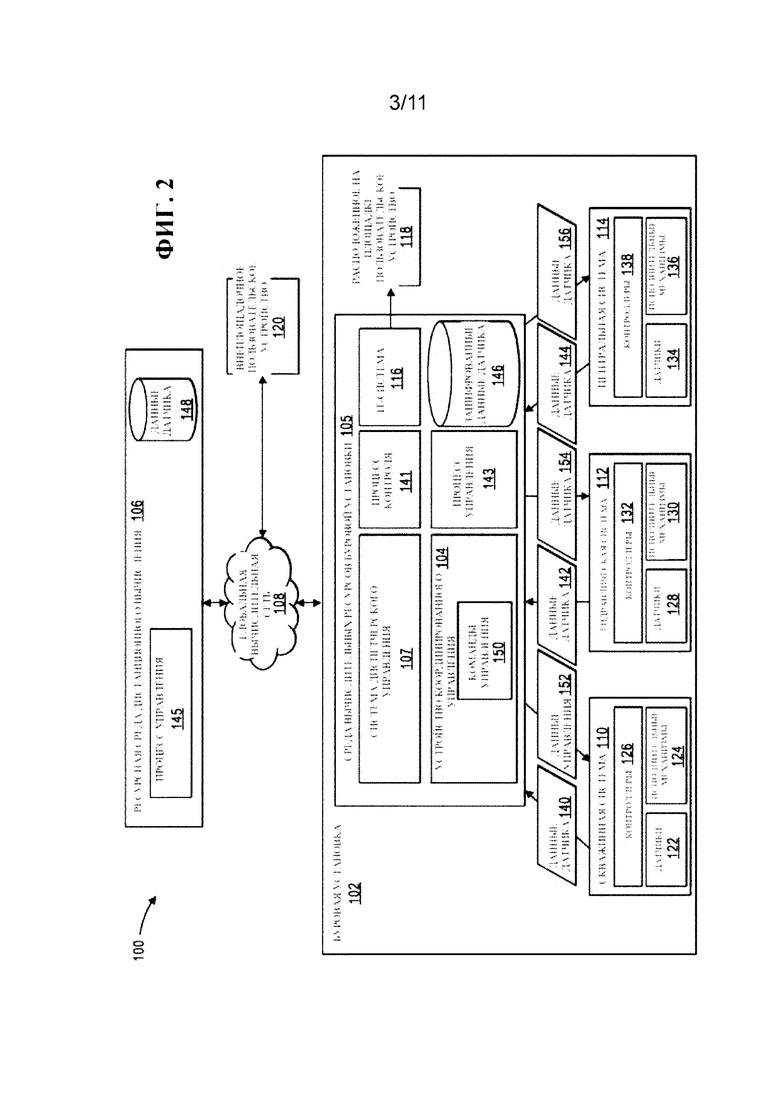
[0032] На фиг. 2 представлен концептуальный схематический вид системы 100 управления согласно одному варианту осуществления. Среда 105 вычислительных ресурсов буровой установки может обмениваться данными с внеплощадочными устройствами и системами посредством сети 108 (например, глобальной вычислительной сети (WAN), такой как Интернет). Кроме того, среда 105 вычислительных ресурсов буровой установки может обмениваться данными с ресурсной средой 106 дистанционного вычисления посредством сети 108. На фиг. 2 также показаны вышеупомянутые типовые системы буровой установки 102, такие как скважинная система 110, гидравлическая система 112, центральная система 114 и IT-система 116. В некоторых вариантах осуществления одно или более расположенных на площадке пользовательских устройств 118 также могут быть включены в буровую установку 102. Расположенные на площадке пользовательские устройства 118 могут взаимодействовать с IT-системой 116. Расположенные на площадке пользовательские устройства 118 могут включать любое количество пользовательских устройств, например стационарные пользовательские устройства, предназначенные для размещения на буровой установке 102, и/или портативные пользовательские устройства. В некоторых вариантах осуществления расположенные на площадке пользовательские устройства 118 могут включать настольный компьютер, портативный компьютер, смартфон, карманный компьютер (PDA), планшетное устройство, носимый компьютер или другие подходящие устройства. В некоторых вариантах осуществления расположенные на площадке пользовательские устройства 118 могут обмениваться данными со средой 105 вычислительных ресурсов буровой установки 102, ресурсной средой 106 дистанционного вычисления или с ними обоими.
[0033] В некоторых вариантах осуществления одно или более внеплощадочных пользовательских устройств 120 также могут быть включены в буровую установку 100. Внеплощадочные пользовательские устройства 120 могут включать настольный компьютер, портативный компьютер, смартфон, карманный компьютер (PDA), планшетное устройство, носимый компьютер или другие подходящие устройства. Внеплощадочные пользовательские устройства 120 могут быть выполнены с возможностью приема и/или передачи информации (например, могут иметь функцию контроля) от буровой установки 102 и/или на нее путем осуществления связи со средой 105 вычислительных ресурсов буровой установки. В некоторых вариантах осуществления внеплощадочные пользовательские устройства 120 могут обеспечивать процессы управления для управления работой различных систем буровой установки 102. В некоторых вариантах осуществления внеплощадочные пользовательские устройства 120 могут обмениваться данными с ресурсной средой 106 дистанционного вычисления посредством сети 108.
[0034] Пользовательские устройства 118 и/или 120 могут представлять собой примеры человеко-машинного интерфейса. Эти устройства 118, 120 могут обеспечивать отображение обратной связи от различных подсистем буровой установки и ввод команд пользователем. В различных вариантах осуществления такие человеко-машинные интерфейсы могут быть расположены на площадке или за ее пределами, или же и там, и там.
[0035] Системы буровой установки 102 могут содержать различные датчики, исполнительные механизмы и контроллеры (например, программируемые логические контроллеры (ПЛК)), которые могут обеспечивать обратную связь для использования в среде 105 вычислительных ресурсов буровой установки. Например, скважинная система 110 может содержать датчики 122, исполнительные механизмы 124 и контроллеры 126. Гидравлическая система 112 может содержать датчики 128, исполнительные механизмы 130 и контроллеры 132. Кроме того, центральная система 114 может содержать датчики 134, исполнительные механизмы 136 и контроллеры 138. Датчики 122, 128 и 134 могут включать любые датчики, подходящие для работы в буровой установке 102. В некоторых вариантах осуществления датчики 122, 128 и 134 могут включать камеру, датчик давления, датчик температуры, датчик расхода, датчик вибрации, датчик тока, датчик напряжения, датчик сопротивления, датчик или устройство обнаружения жестов, устройство или датчик с возможностью управления голосом или распознавания голоса или другие подходящие датчики.
[0036] Вышеописанные датчики могут обеспечивать информационную обратную связь датчиков со средой 105 вычислительных ресурсов буровой установки (например, с устройством 104 координированного управления). Например, датчики 122 скважинной системы могут предоставлять данные 140 датчика, датчики 128 гидравлической системы могут предоставлять данные 142 датчика, а датчики 134 центральной системы могут предоставлять данные 144 датчика. Данные 140, 142 и 144 датчика могут включать, например, рабочее состояние оборудования (например, включение или выключение, движение вверх или вниз, установка или высвобождение и т. д.), параметры бурения (например, глубину, нагрузку на крюке, крутящий момент и т. д.), вспомогательные параметры (например, данные о вибрации насоса) и другие соответствующие данные. В некоторых вариантах осуществления полученные данные датчика могут включать временную метку (например, дату, время или обе) или могут быть привязаны к ней, указывающую, когда были получены данные датчика. Кроме того, данные датчика могут быть согласованы с глубиной или другим параметром бурения.
[0037] Как уже упоминалось, система 100 управления может быть использована для выполнения одного или более рабочих процессов. Рабочий процесс может представлять собой процесс, который содержит множество рабочих этапов. Рабочий процесс может оперировать данными, например, для создания новых данных, для обновления существующих данных и т. д. Например, рабочий процесс может оперировать одними или более входными данными и создавать один или более результатов, например, на основании одного или более алгоритмов. Например, система может включать редактор рабочего процесса для создания, редактирования, выполнения и т. д. рабочего процесса. В одном таком примере редактор рабочего процесса может обеспечивать выбор одного или более заданных рабочих этапов, одного или более настраиваемых рабочих этапов и т. д. В качестве примера рабочий процесс может представлять собой рабочий процесс, выполненный с возможностью реализации в программном обеспечении PETREL®, например, которое работает с сейсмическими данными, сейсмическим параметром (параметрами) и т. д. В качестве примера рабочий процесс может представлять собой процесс, выполненный с возможностью реализации на программной платформе OCEAN®. В качестве примера рабочий процесс может включать один или более рабочих этапов, которые обеспечивают доступ к модулю, например, подключаемому модулю (например, внешнему исполняемому коду и т. д.).
[0038] Как описано выше, система 100 управления может быть использована при планировании разработки месторождения и операциях бурения. В вариантах осуществления система 100 управления может быть использована для воспроизведения или моделирования бурения одной или более скважин и управления буровым оборудованием во время осуществления операций бурения. В вариантах осуществления система 100 управления может быть использована для охарактеризования откликов в буровой системе во время осуществления операций бурения. Чтобы охарактеризовать отклик во время осуществления операций бурения, система 100 управления может использовать одну или более автоматизированных последовательностей. В вариантах осуществления автоматизированные последовательности могут представлять собой последовательность операций в течение периода времени, которые изменяют один или более рабочих параметров операции бурения, не изменяя при этом другие рабочие параметры операции бурения.
[0039] В некоторых вариантах осуществления, например, автоматизированные последовательности, предварительно сформированные системой 100 управления, могут активно возмущать на буровую систему или приводить в действие буровую систему управляемым образом в диапазоне различных местоположений в пределах ее области рабочих режимов и обеспечивать обратную связь как на поверхности, так и в забое скважины. Скважина может находиться около BHA 162 и в множестве точек вдоль бурильной колонны 160. В некоторых вариантах осуществления, например, касающихся гидравлики, возмущения/последовательности могут применять в таких точках во время осуществления процесса бурения, в которых известны условия в стволе скважины. В некоторых вариантах осуществления, например, вместо того, чтобы возмущать буровую систему, автоматизированные последовательности, выполняемые системой 100 управления, также могут реализовывать ситуации, имеющие место при осуществлении обычной операции бурения, когда системой управляют в диапазоне условий, например, процесс наращивания бурильной колонны и переход ко дну. В некоторых вариантах осуществления, например, автоматизированные последовательности, выполняемые системой 100 управления, могут систематически определять рабочие границы.
[0040] Из-за физических процессов некоторые свойства изменяются по мере распространения ствола скважины, а также изменения длины бурильной колонны и столба бурового раствора. В некоторых вариантах осуществления, например, автоматизированные последовательности могут быть запланированы и выполнены в множестве точек во время осуществления операций бурения. Это может позволить получать информацию не только путем измерения характеристик системы в один момент времени или на одной отметке глубины, но и путем контроля того, как эти характеристики изменяются по мере продвижения процесса строительства скважины. В некоторых вариантах осуществления, например, система 100 управления может обладать информацией об изменениях, происходящих во время осуществления операций бурения (например, об удлинении бурильной колонны 160). В ответ на эти изменения система 100 управления может автоматически обновлять автоматизированные последовательности в соответствии с ходом строительства скважины. Например, по мере того, как бурильная колонна 160 увеличивается в длину, может потребоваться больше времени на стабилизацию частоты вращения в скважине после запуска. В этом примере автоматизированная последовательность может быть изменена, поэтому перед тем, как будет выполнена привязка на некотором расстоянии от забоя период ожидания будет увеличен.
[0041] Во время выполнения автоматизированных последовательностей система 100 может измерять и записывать отклики буровой системы на автоматизированные последовательности. Чтобы получить полное представление отклика, измерение может быть получено на поверхности и в стволе скважины, например, с помощью датчиков 122, 128 и 134. Измеренные и записанные отклики могут быть использованы для обновления моделей буровой системы и изменения рабочих параметров буровых операций. Система 100 может автоматически обратно связывать измеренные и записанные отклики с настройкой/калибровкой моделей в реальном времени. В некоторых вариантах осуществления измеренные и записанные отклики могут храниться для использования в будущих операциях бурения. Например, измеренные и записанные отклики могут быть сохранены в виде матрицы свойств отклика системы, определенных с использованием автоматизированных последовательностей/модуляции в интервалах глубины и времени.
[0042] При использовании автоматизированных последовательностей система 100 управления может достигать уровня согласованности и одновременно управлять множеством переменных (насос, поворот и положение блока), что невозможно для бурильщика-человека. Помимо того, что автоматизация обеспечивает лучшее одновременное управление параметрами, система 100 может быть выполнена с возможностью автоматической настройки в соответствии с ситуацией и может быть повторяемой. Аналогично, благодаря использованию автоматизированных последовательностей во время осуществления операций бурения в будущем система 100 может использовать собранные данные для управления поведением буровой системы в режиме реального времени, т. e. система 100 может непрерывно обучаться.
[0043] На фиг. 3 представлена блок-схема способа 300 охарактеризования откликов в буровой системе. Представленные этапы способа являются примерами и любой из приведенных этапов может быть исключен, могут быть добавлены дополнительные этапы и порядок приведенных этапов может быть изменен.
[0044] На этапе 302 отклики в буровой системе могут быть смоделированы перед осуществлением операций бурения. В некоторых вариантах осуществления, например, модель отклика в буровой системе может описывать ожидаемую операцию при бурении в формации. Кроме того, модель также может включать рабочие параметры буровых операций для обеспечения осуществления предполагаемой операции. Рабочие параметры могут включать любые факторы, которыми можно управлять для управления буровой системой. Например, операции бурения могут включать три отдельных механические операции на поверхности: перекачивание бурового раствора, вращение трубы и перемещение талевого блока. Каждая из механических операций на поверхности может быть связана с силовым аспектом: давлением перекачиваемой текучей среды, крутящим моментом для вращения бурильной колонны и нагрузкой, создаваемой массой бурильной колонны, например, нагрузкой на крюк при подвешивании бурильной колонны в скважине.
[0045] В некоторых вариантах осуществления, например, отклик буровой системы может быть смоделирован на основании операций бурения в соседних скважинах и накопленного в отрасли опыта. В некоторых вариантах осуществления, например, отклик буровой системы может быть смоделирован автоматически системой 100. В одном варианте осуществления отклик буровой системы может быть смоделирован системой 100 на основании данных, введенных пользователем.
[0046] На этапе 304 можно выбрать и запланировать одну или более автоматизированных последовательностей для охарактеризования откликов буровой системы во время осуществления части операций бурения. В некоторых вариантах осуществления, например, автоматизированные последовательности могут представлять собой последовательность операций в течение периода времени, которые изменяют один или более рабочих параметров операции бурения, не изменяя при этом другие рабочие параметры операции бурения. В некоторых вариантах осуществления автоматизированные последовательности могут быть интегрированы в процесс бурения или другие аспекты процесса строительства скважины, такие как спуск и цементирование обсадной колонны. Например, хотя стандартные значения производительности (расход, скорость вращения в оборотах/мин и малая величина нагрузки на долото) постоянны, зависимость силовых аспектов от производительности обеспечивает информацию о буровой системе и выбуренной породе.
[0047] В некоторых вариантах осуществления, например, операции бурения могут включать множество подлежащих выполнению автоматизированных последовательностей. Например, эксплуатация долота может включать множество автоматизированных последовательностей, которые необходимо выполнять во время эксплуатации долота. Аналогично, например, каждая эксплуатация долота во время осуществления операций бурения может включать отдельные подлежащие выполнению автоматизированные последовательности. В некоторых вариантах осуществления автоматизированные последовательности могут быть автоматически выбраны и запланированы системой 100. В одном варианте осуществления автоматизированные последовательности могут быть выбраны и запланированы системой 100 на основании данных, введенных пользователем.
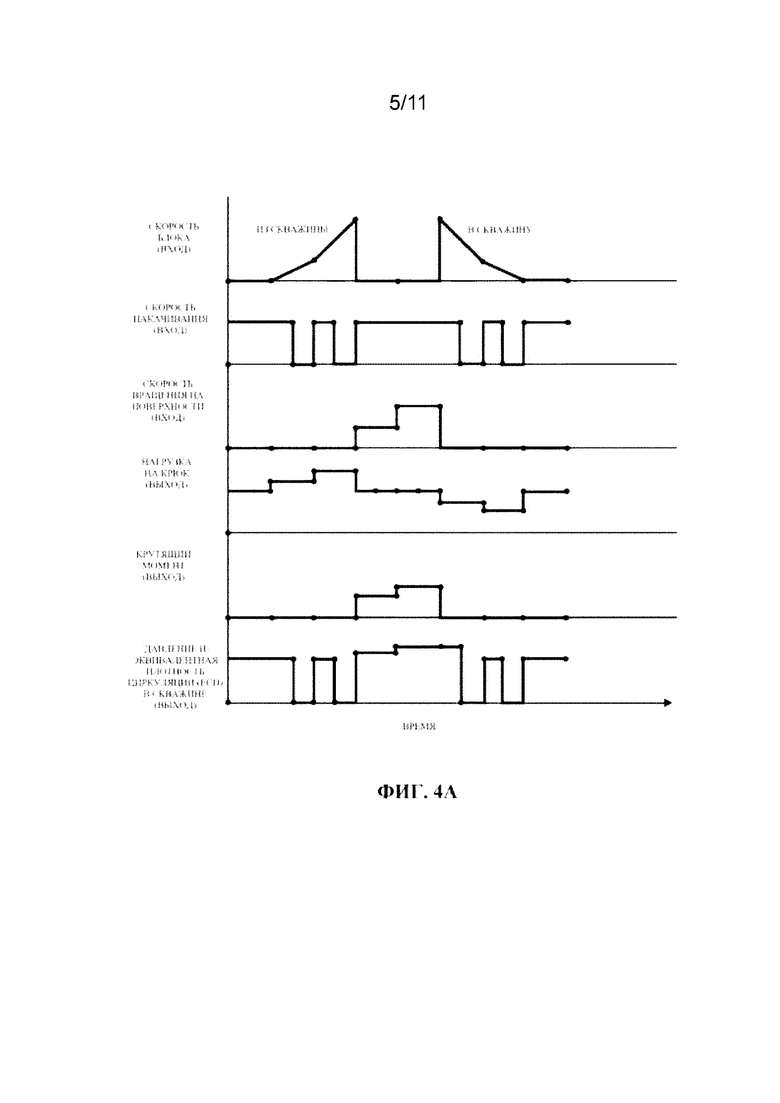
[0048] В некоторых вариантах осуществления, например, автоматизированная последовательность может включать запрограммированный процесс отрыва и поднятия от забоя, спуска и задания крутящего момента при различных скоростях. Например, этот процесс может включать две разные постоянные скорости поднятия и спуска блока. Кроме того, например, применяют две различные частоты вращения для задания значения крутящего момента на некотором расстоянии от забоя. На фиг. 4A представлен один пример запрограммированного процесса отрыва и поднятия от забоя, спуска и задания крутящего момента при различных скоростях. Как показано на фиг. 4А, последовательность может включать изменение с течением времени скорости блока, скорости накачивания и скорости вращения на поверхности. Система 100 управления может измерять отклики на последовательность, выполняемую буровой системой, например, с использованием одного или более датчиков 122, 128 и 134, расположенных как на поверхности, так и в скважине. Например, нагрузку на крюк и крутящий момент можно измерить на поверхности, а давление и эквивалентную плотность циркуляции (ECD) можно измерить в скважине.
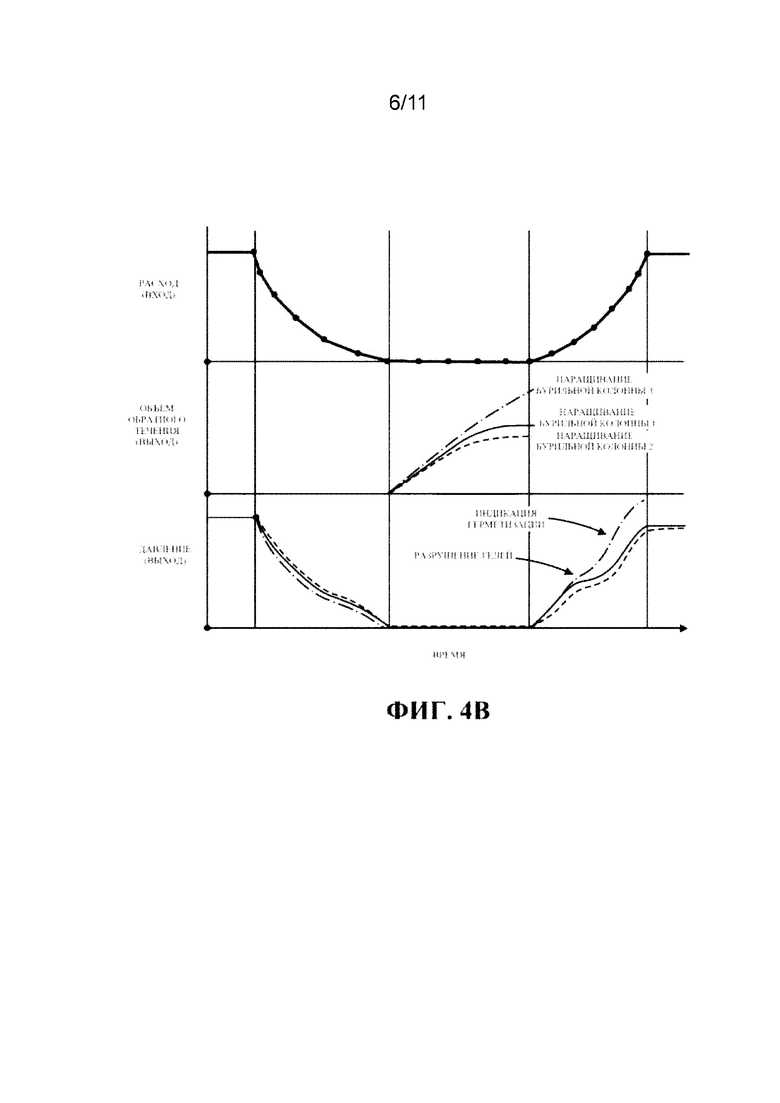
[0049] В некоторых вариантах осуществления, например, автоматизированная последовательность может включать запрограммированную последовательность для прекращения расхода и остановки вращения в конце наращивания бурильной колонны и увеличения расхода и скорости вращения в начале наращивания бурильной колонны. Запрограммированная последовательность может позволить сравнивать профили откачивания обратного течения, определять давление, требуемое для преодоления прочности геля бурового раствора, и определять вращательные переходные процессы. На фиг. 4В проиллюстрирован один пример запрограммированного процесса для прекращения расхода и остановки вращения в конце наращивания бурильной колонны и увеличения расхода и скорости вращения в начале наращивания бурильной колонны. Как показано на фиг. 4В, последовательность может включать изменение расхода, например, расхода бурового раствора с течением времени. Система 100 управления может измерять отклики на последовательность, выполняемую буровой системой, например, с использованием одного или более датчиков 122, 128 и 134, расположенных как на поверхности, так и в скважине. Например, на поверхности могут быть измерены объем обратного течения бурового раствора и давление бурового раствора.
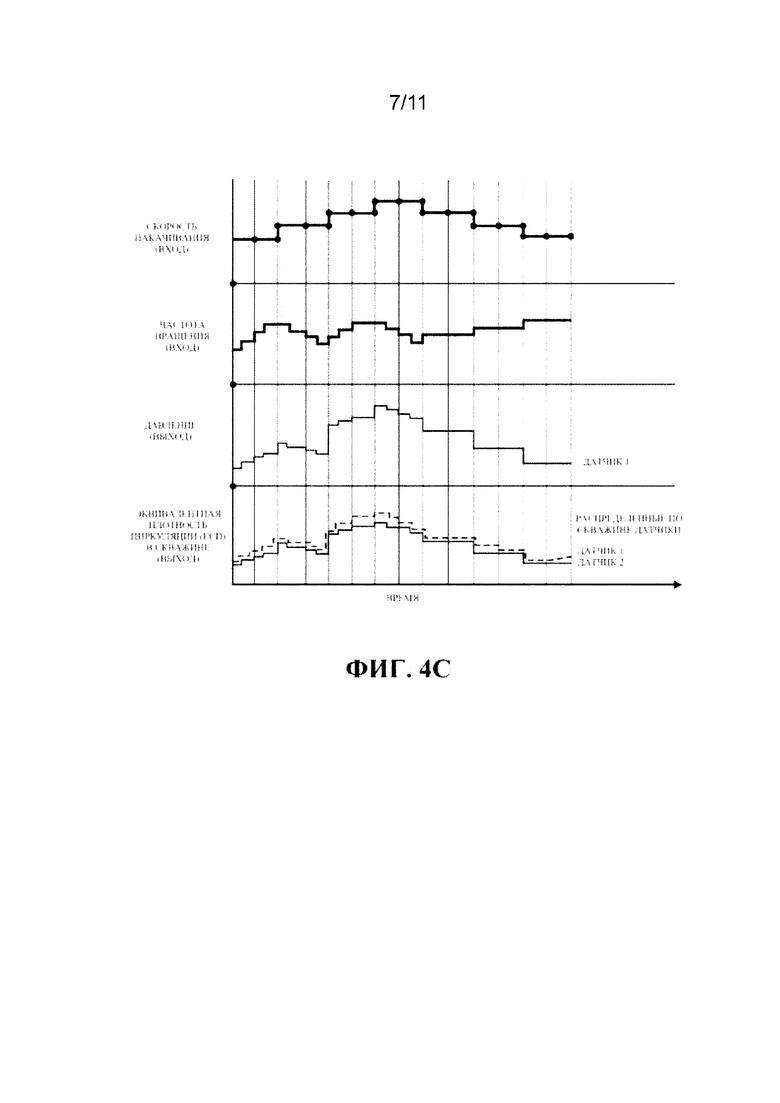
[0050] В некоторых вариантах осуществления, например, автоматизированная последовательность может включать запрограммированную последовательность измерения расхода и скорости вращения (или независимо). Запрограммированная последовательность может обеспечивать охарактеризование отклика гидравлической системы и калибровку гидравлической модели буровой системы. На фиг. 4С проиллюстрирован один пример запрограммированной последовательности измерения расхода и скорости вращения (или независимо). Как показано на фиг. 4С, последовательность может включать изменение скорости накачивания, например, скорости накачивания бурового раствора с течением времени. Последовательность также может включать изменение частоты вращения, например, частоты вращения бурового долота с течением времени. Система 100 управления может измерять отклики на последовательность, выполняемую буровой системой, например, с использованием одного или более датчиков 122, 128 и 134, расположенных как на поверхности, так и в скважине. Например, давление бурового раствора может быть измерено на поверхности, а эквивалентная плотность циркуляции (ECD) может быть измерена в скважине.
[0051] В некоторых вариантах осуществления, например, автоматизированная последовательность может включать запрограммированную последовательность перемещения блока вверх и вниз для охарактеризования трения на шкиве талевого блока и исключения этого эффекта из вычислений нагрузки на долото (WOB) и нагрузки на крюк. Система 100 управления может измерять отклики на последовательность, выполняемую буровой системой, например, с использованием одного или более датчиков 122, 128 и 134, расположенных как на поверхности, так и в скважине.
[0052] В некоторых вариантах осуществления, например, автоматизированная последовательность может включать запрограммированную последовательность перемещения блока вверх и вниз с изменением расхода и скорости вращения, если требуется, для калибровки свабирования/колебаний. Система 100 управления может измерять отклики на последовательность, выполняемую буровой системой, например, с использованием одного или более датчиков 122, 128 и 134, расположенных как на поверхности, так и в скважине. Например, с помощью этой автоматизированной последовательности может быть осуществлено измерение давления в кольцевом пространстве скважины.
[0053] В некоторых вариантах осуществления, например, автоматизированная последовательность может включать запрограммированную последовательность изменения WOB во время бурения или же скорости вращения во время бурения или на некотором расстоянии от забоя для определения отклика системы и предотвращения возбуждения сильных переходных процессов. Система 100 управления может измерять отклики на последовательность, выполняемую буровой системой, например, с использованием одного или более датчиков 122, 128 и 134, расположенных как на поверхности, так и в скважине.
[0054] В некоторых вариантах осуществления, например, автоматизированная последовательность может включать запрограммированную последовательность для охарактеризования взаимосвязи между WOB, дифференциальным давлением и положением отклонителя при бурении с помощью двигателя. Система 100 управления может измерять отклики на последовательность, выполняемую буровой системой, например, с использованием одного или более датчиков 122, 128 и 134, расположенных как на поверхности, так и в скважине.
[0055] В некоторых вариантах осуществления, например, автоматизированная последовательность может включать запрограммированную последовательность для охарактеризования взаимосвязей между параметрами бурения и колебаниями BHA во время бурения или расширения ствола скважины. Система 100 управления может измерять отклики на последовательность, выполняемую буровой системой, например, с использованием одного или более датчиков 122, 128 и 134, расположенных как на поверхности, так и в скважине.
[0056] В некоторых вариантах осуществления, например, автоматизированная последовательность может включать запрограммированную последовательность, согласно которой система SLIDER® циклизирует крутящий момент на поверхности для улучшения передачи нагрузки и управления положением отклонителя с помощью скважинной обратной связи в виде положения отклонителя BHA. Наземная система может быть запрограммирована на автоматическое выполнение последовательности операций (в определенных точках траектории) для обеспечения изучения отклика системы и, таким образом, улучшения алгоритмов передачи нагрузки и/или управления положением отклонителя. Система 100 управления может измерять отклики на последовательность, выполняемую буровой системой, например, с использованием одного или более датчиков 122, 128 и 134, расположенных как на поверхности, так и в скважине.
[0057] В некоторых вариантах осуществления, например, автоматизированная последовательность может включать запрограммированную последовательность контроля изменения нагрузки на крюк на поверхности в диапазоне циркуляционного расхода при вращении на некотором расстоянии от забоя (измерение эффекта поднятия). Система 100 управления может измерять отклики на последовательность, выполняемую буровой системой, например, с использованием одного или более датчиков 122, 128 и 134, расположенных как на поверхности, так и в скважине.
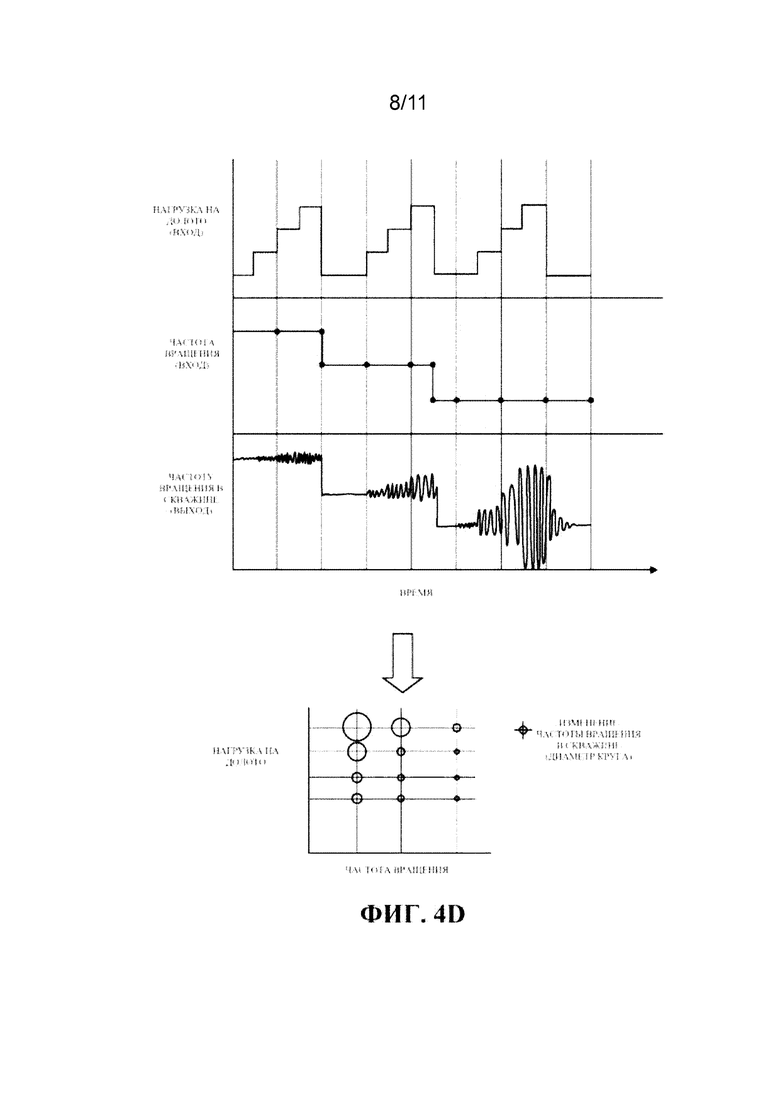
[0058] В некоторых вариантах осуществления, например, автоматизированная последовательность может включать запрограммированную последовательность ступенчатого увеличения нагрузки на долото при постоянной скорости вращения для определения точки, в которой система обеспечения вращения начинает работать неустойчиво и входит в установившийся режим прерывистого перемещения (режим вибрации при кручении). На фиг. 4D представлен один пример запрограммированной последовательности ступенчатого увеличения нагрузки на долото при постоянной скорости вращения. Как показано на фиг. 4D, последовательность может включать изменение WOB и частоты вращения с течением времени. Система 100 управления может измерять отклики на последовательность, выполняемую буровой системой, например, с использованием одного или более датчиков 122, 128 и 134, расположенных как на поверхности, так и в скважине. Например, частота вращения бурового долота может быть измерена в скважине. Кроме того, система 100 управления может генерировать один или более дополнительных графиков или диаграмм для иллюстрации откликов, например, изменения скорости бурения скважины.
[0059] В некоторых вариантах осуществления, например, автоматизированная последовательность может включать запрограммированную последовательность, которая развертывается в диапазоне значений скорости вращения на поверхности на некотором расстоянии от забоя для определения местоположения резонансов изгибных колебаний BHA. На фиг. 4E представлен один пример запрограммированной последовательности, которая развертывается в диапазоне значений скорости вращения на поверхности на некотором расстоянии от забоя. Как показано на фиг. 4E, последовательность может включать изменение WOB и частоты вращения с течением времени. Система 100 управления может измерять отклики на последовательность, выполняемую буровой системой, например, с использованием одного или более датчиков 122, 128 и 134, расположенных как на поверхности, так и в скважине. Например, в скважине может быть измерено боковое перемещение бурового долота. Кроме того, система 100 управления может генерировать один или более дополнительных графиков или диаграмм для иллюстрации откликов, например, трехмерную диаграмму бокового перемещения.
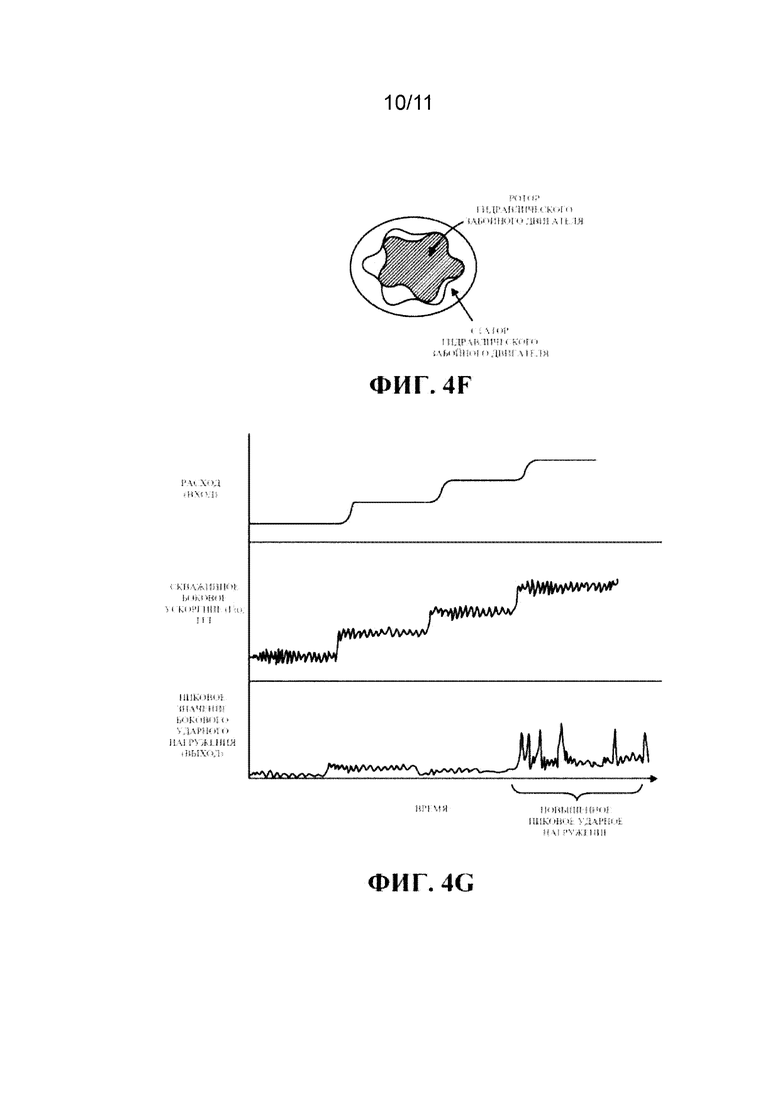
[0060] В некоторых вариантах осуществления, например, автоматизированная последовательность может включать запрограммированную последовательность, которая инициирует накачивание при различных значениях расхода (в забое или на некотором расстоянии от забоя) для определения наличия любой корреляции между боковой устойчивостью BHA (резонансы изгибных колебаний) и частотой колебаний гидравлического забойного двигателя, или активирует усилие роторной управляемой системы (RSS), которое создает возбуждения на частотах, которые зависят от расхода. На фиг. 4F и 4G представлен один пример запрограммированной последовательности, которая инициирует накачивание при различных значениях расхода (в забое или на некотором расстоянии от забоя). Как показано на фиг. 4F, буровой раствор может протекать в ротор гидравлического забойного двигателя со статором бурового раствора и обеспечивает ускорение ротора гидравлического забойного двигателя. Как показано на фиг. 4G, последовательность может включать изменение расхода, например, расхода бурового раствора с течением времени. Система 100 управления может измерять отклики на последовательность, выполняемую буровой системой, например, с использованием одного или более датчиков 122, 128 и 134, расположенных как на поверхности, так и в скважине. Например, в скважине можно измерять боковое ускорение гидравлического забойного двигателя или бурового долота и пиковое значение бокового ударного нагружения.
[0061] В некоторых вариантах осуществления, например, автоматизированная последовательность может включать запрограммированную последовательность, которая динамически «настраивает» коэффициент усиления установки автоматического бурения на основании полученной модели взаимодействий шарошечного долота в режиме реального времени. Это может уменьшить или исключить потери времени на подбор правильной скорости перемещения блоков после изменения формации, например, по сравнению с пропорционально-интегральными контроллерами. Система 100 управления может измерять отклики на последовательность, выполняемую буровой системой, например, с использованием одного или более датчиков 122, 128 и 134, расположенных как на поверхности, так и в скважине.
[0062] В некоторых вариантах осуществления, например, автоматизированная последовательность может включать запрограммированную последовательность, которая автоматически модулирует частоту хода поршня бурового насоса для определения оптимальной комбинации хода насоса, чтобы максимизировать соотношение сигнала к помехам телеметрической системы измерения забойных параметров в процессе бурения (MWD). Система 100 управления может измерять отклики на последовательность, выполняемую буровой системой, например, с использованием одного или более датчиков 122, 128 и 134, расположенных как на поверхности, так и в скважине.
[0063] В некоторых вариантах осуществления, например, автоматизированная последовательность может включать запрограммированную последовательность, которая инициирует изменение нагрузки при бурении с помощью двигателя и вращении, а также измерение давления, а затем использует инверсию при проскальзывании. Система 100 управления может измерять отклики на последовательность, выполняемую буровой системой, например, с использованием одного или более датчиков 122, 128 и 134, расположенных как на поверхности, так и в скважине.
[0064] В некоторых вариантах осуществления, например, автоматизированная последовательность может включать запрограммированную последовательность, которая инициирует изменение расхода и измерение частоты вращения двигателя. Изменение расхода и измерение частоты вращения двигателя может быть осуществлено с помощью любого оборудования системы 100 управления. Система 100 управления может измерять отклики на последовательность, выполняемую буровой системой, например, с использованием одного или более датчиков 122, 128 и 134, расположенных как на поверхности, так и в скважине.
[0065] В некоторых вариантах осуществления, например, автоматизированная последовательность может включать запрограммированную последовательность, которая потенциально инициирует изменение как расхода, так и нагрузки на долото, и измерение частоты вращения двигателя и давления, чтобы получить зависимость частоты вращения двигателя от расхода и давления. Система 100 управления может измерять отклики на последовательность, выполняемую буровой системой, например, с использованием одного или более датчиков 122, 128 и 134, расположенных как на поверхности, так и в скважине.
[0066] В некоторых вариантах осуществления, например, автоматизированная последовательность может включать запрограммированную последовательность, которая инициирует изменение частоты вращения и/или расхода и измерение температуры вдоль измерительных элементов бурильной колонны 160. Это может быть использовано для калибровки моделей трения. Система 100 управления может измерять отклики на последовательность, выполняемую буровой системой, например, с использованием одного или более датчиков 122, 128 и 134, расположенных как на поверхности, так и в скважине.
[0067] В некоторых вариантах осуществления, например, автоматизированная последовательность может включать запрограммированную последовательность, которая во время бурения инициирует перемещение блока с различными скоростями. Это может быть использовано для изучения влияния на скорость изменения нагрузки для определения осевого соответствия бурильной колонны 160. Система 100 управления может измерять отклики на последовательность, выполняемую буровой системой, например, с использованием одного или более датчиков 122, 128 и 134, расположенных как на поверхности, так и в скважине.
[0068] В некоторых вариантах осуществления для любой из автоматизированных последовательностей, описанных выше, при выборе и планировании автоматизированных последовательностей может учитываться ситуация. Например, ситуация может включать глубину скважины, траекторию пробуренного ствола скважины, тип используемого бурового раствора, типы используемых бурильной колонны, BHA и/или бурового долота, независимо от того, выполнено ли обсаживание скважины, и т. п. Ситуация может учитываться при проектировании и выполнении автоматизированных последовательностей. Например, автоматизированные последовательности могут быть изменены по мере того, как бурильная колонна или длина ствола скважины увеличивается или изменяется в зависимости от положения в пределах запланированной траектории.
[0069] На этапе 306 могут быть выполнены операции бурения. В некоторых вариантах осуществления система 100 управления может автоматически инициировать выполнение операций бурения. В одном варианте осуществления система 100 управления может инициировать выполнение операций бурения на основании данных, введенных пользователем.
[0070] На этапе 308 может быть определено, запланировано ли выполнение автоматизированной последовательности. В некоторых вариантах осуществления, например, система 100 управления может непрерывно проверять во время осуществления операций бурения, запланировано ли выполнение автоматизированной последовательности. В любой момент времени, если выполнение автоматизированной последовательности не запланировано, на этапе 310 может быть определено, завершена ли операция бурения. Если операции бурения завершены, способ 300 может быть закончен. Если операции бурения не завершены, способ 300 может вернуться к этапу 306 и может быть продолжено осуществление операций бурения.
[0071] На этапе 308, если определено, что выполнение автоматизированной последовательности запланировано, может быть определено, следует ли обновить автоматизированные последовательности (этап 311), и они могут быть обновлены (этап 312). В некоторых вариантах осуществления, например, система 100 управления может обладать информацией об изменениях, происходящих во время осуществления операций бурения (например, об удлинении бурильной колонны 160). В ответ на эти изменения система 100 управления может автоматически обновлять автоматизированные последовательности по ходу строительства скважины.
[0072] Например, в некоторых вариантах осуществления по мере того, как бурильная колонна 160 увеличивается в длину, может потребоваться больше времени на стабилизацию частоты вращения в скважине после запуска. В этом примере автоматизированная последовательность может быть изменена, поэтому перед тем, как будет выполнена привязка на некотором расстоянии от забоя период ожидания будет увеличен. Это справедливо, например, и для автоматизированной последовательности, которая включает запрограммированную последовательность перемещения блока вверх и вниз с изменением расхода и скорости вращения, если требуется, применяемой для калибровки свабирования/колебаний. Например, при бурении скважины автоматизированная последовательность может быть установлена путем увеличения и уменьшения скоростей, чтобы избежать превышения порога эквивалентной удельной массы бурового раствора, определенной в точке ствола скважины, такой как башмак обсадной колонны.
[0073] Как только автоматизированная последовательность будет обновлена (при необходимости), автоматизированная последовательность может быть выполнена и во время выполнения автоматизированной последовательности могут быть собраны данные (этап 313). В вариантах осуществления отклики буровой системы могут быть измерены с помощью датчиков, расположенных на поверхности и внутри ствола скважины. Например, могут быть собраны данные от датчиков 122, 128 и 134 буровой системы. Как обсуждалось выше со ссылкой на фиг. 4А-4G, система 100 управления может собирать данные и генерировать графики и диаграммы, которые иллюстрируют автоматизированные последовательности и собранные данные. Система 100 управления может выводить, например, на один дисплей, графики и диаграммы для пользователя системы 100 управления.
[0074] В некоторых вариантах осуществления выполнение последовательности и сбор данных могут выполняться автоматически системой 100. В одном варианте осуществления выполнение последовательности и сбор данных могут выполняться системой 100 на основании данных, введенных пользователем.
[0075] На этапе 314 собранные данные могут быть сопоставлены с моделью отклика буровой системы и модель отклика буровой системы может быть откалибрована. На этапе 316 может быть определено, влияют ли изменение модели или собранных данных на осуществление операций бурения. Если такое влияние на операции бурения имеет место, процессы бурения могут быть изменены на основании изменения модели или собранных данных (этап 318). В некоторых вариантах осуществления, например, собранные данные и/или откалиброванные модели могут быть использованы для определения того, как управлять буровой системой (как осуществлять на поверхности входные воздействия в виде перемещения: накачивание, поворот и перемещения блоков), чтобы безопасно максимизировать производительность и эффективность при бурении. Процесс бурения может представлять собой постоянный, развивающийся процесс. В некоторых вариантах осуществления, например, система может быть выполнена с возможностью выявления отклонений от ожидаемых тенденций на ранней стадии и предупреждения пользователя или автоматического выполнения соответствующей процедуры. В некоторых вариантах осуществления, например, система 100 может использовать откалиброванные модели отклика системы для обновления эксплуатационных границ для поддержания работы буровой системы в безопасной/стабильной зоне.
[0076] На этапе 320 собранные данные и откалиброванная модель могут быть сохранены. В некоторых вариантах осуществления собранные данные и/или откалиброванные модели могут быть сохранены для использования при осуществлении операций бурения в будущем. Например, собранные данные могут быть сохранены в виде матрицы свойств отклика системы, определенных с использованием автоматизированных последовательностей/модуляции в интервалах глубины и времени.
[0077] В некоторых вариантах осуществления способы настоящего изобретения могут выполняться с помощью вычислительной системы. На фиг. 5 представлен пример такой вычислительной системы 500 согласно некоторым вариантам осуществления. Вычислительная система 500 может включать компьютер или компьютерную систему 501А, которая может представлять собой отдельную компьютерную систему 501А или систему распределенных компьютерных систем. Компьютерная система 501А содержит один или более модулей 502 анализа, которые выполнены с возможностью выполнения различных задач согласно некоторым вариантам осуществления, например, один или более описанных в настоящем документе способов. Для выполнения этих различных задач модуль 502 анализа функционирует независимо или во взаимодействии с одним или более процессоров 504, которые подключены к одному или более носителям 506 информации. Процессор (процессоры) 504 также подключен к сетевому интерфейсу 507, чтобы компьютерная система 501A могла осуществлять обмен данными по сети 509 данных с одной или более других компьютерных систем и/или вычислительных систем, таких как 501B, 501C и/или 501D (следует отметить, что компьютерные системы 501B, 501C и/или 501D могут иметь или могут не иметь такую же архитектуру, что и компьютерная система 501A, и могут быть расположены в разных физических местоположениях, например, компьютерные системы 501A и 501B могут быть расположены в оборудовании обработки и могут осуществлять обмен данными с одной или более компьютерными системами, такими как 501C и/или 501D, которые расположены в одном или более центрах обработки данных и/или расположены в разных странах на разных континентах).
[0078] Процессор может включать микропроцессор, микроконтроллер, процессорный модуль или подсистему, программируемую интегральную схему, программируемую матрицу логических элементов или другое управляющее или вычислительное устройство.
[0079] Носитель 506 информации может быть реализован в виде одного или более считываемых компьютером или машиночитаемых носителей информации. Следует отметить, что хотя в типовом варианте осуществления по фиг. 5 носитель 506 информации изображен как находящийся внутри компьютерной системы 501A, в некоторых вариантах осуществления носитель 506 информации может быть распределен в множестве и/или по множеству внутренних и/или внешних корпусов вычислительной системы 501A и/или дополнительных вычислительных систем. Носители 506 информации могут включать один или более различных видов запоминающих устройств, включая полупроводниковые запоминающие устройства, например, динамические или статические запоминающие устройства с произвольным доступом (DRAM или SRAM), стираемые и программируемые постоянные запоминающие устройства (EPROM), электрически стираемые и программируемые постоянные запоминающие устройства (EEPROM) и электрически перепрограммируемые постоянные запоминающие устройства, магнитные диски, например, жесткие, гибкие и съемные диски, другие магнитные носители, включая ленту, оптические носители, такие как компакт-диски (CD) или цифровые видеодиски (DVD), диски BLURAY® или оптические запоминающие устройства других типов, или устройства для хранения данных других типов. Следует отметить, что вышеописанные команды могут быть предоставлены на одном считываемом компьютером или машиночитаемом носителе информации или, альтернативно, могут быть предоставлены на множестве считываемых компьютером или машиночитаемых носителей информации, распределенных в большой системе, содержащей, возможно, множество узлов. Такой считываемый компьютером или машиночитаемый носитель или среда хранения информации считается (или считаются) частью изделия (или изделия промышленного производства). Изделие или изделие промышленного производства могут относиться к любому изготовленному отдельному компоненту или множеству компонентов. Носитель или среда хранения данных могут быть расположены либо на машине, выполняющей машиночитаемые команды, либо расположены на удаленном узле, с которого машиночитаемые инструкции могут быть загружены по сети для выполнения.
[0080] В некоторых вариантах осуществления вычислительная система 500 содержит один или более модулей 508 управления буровой установкой. В примере вычислительной системы 500 компьютерная система 501А содержит модуль 508 управления буровой установкой. В некоторых вариантах осуществления один модуль управления буровой установкой может быть использован для осуществления некоторых или всех аспектов одного или более вариантов осуществления согласно описанным в настоящем документе способам. В альтернативных вариантах осуществления множество модулей управления буровой установкой может быть использовано для осуществления некоторых или всех аспектов описанных в настоящем документе способов.
[0081] Следует понимать, что вычислительная система 500 является лишь одним примером вычислительной системы и что вычислительная система 500 может содержать больше или меньше компонентов, чем показано на фигуре, в ней могут быть скомбинированы дополнительные компоненты, не изображенные в иллюстративном варианте осуществления, показанном на фиг. 5, и/или вычислительная система 500 может характеризоваться различной конфигурацией или различным расположением компонентов, изображенных на фиг. 5. Различные компоненты, показанные на фиг. 5, могут быть реализованы в аппаратном обеспечении, программном обеспечении или в комбинации как аппаратного, так и программного обеспечения, включая одну или более интегральных схем обработки сигналов и/или специализированных интегральных схем.
[0082] Кроме того, этапы описанных в настоящем документе способов обработки могут быть осуществлены путем выполнения одного или более функциональных модулей в устройстве обработки информации, таком как процессоры общего назначения или специализированные микросхемы, такие как специализированная интегральная схема (ASIC), программируемая логическая интегральная схема (FPGA), программируемое логическое устройство (PLD) или другие применимые устройства. Эти модули, комбинации этих модулей и/или их комбинация с аппаратным обеспечением общего назначения включены в объем защиты настоящего изобретения.
[0083] Вышеприведенное описание с целью пояснения изложено со ссылкой на конкретные варианты осуществления. Однако приведенные выше иллюстративные обсуждения не следует рассматривать как исчерпывающие или ограничивающие настоящее изобретение раскрытыми точными формами. На основании вышеизложенных идей могут быть предложены многочисленные изменения и вариации. Кроме того, порядок, в котором проиллюстрированы и описаны элементы изложенных в настоящем документе способов, может быть изменен и/или два или более элементов могут происходить одновременно. Варианты осуществления были выбраны и описаны для объяснения по меньшей мере некоторых из принципов настоящего изобретения и вариантов его практического применения, чтобы тем самым дать возможность другим специалистам в данной области техники использовать раскрытые способы и системы, а также различные варианты осуществления с различными изменениями, подходящими для предполагаемого конкретного использования.



Предложены вычислительные системы, считываемые компьютером носители и способы, которые могут включать определение по меньшей мере одной автоматизированной последовательности, подлежащей выполнению во время осуществления части операции бурения с помощью буровой системы. По меньшей мере одна автоматизированная последовательность может включать выполнение одного или более действий, вызывающих отклик в буровой системе. Способ может включать выполнение во время операции бурения по меньшей мере одной автоматизированной последовательности. Кроме того, способ может включать измерение во время выполнения по меньшей мере одной автоматизированной последовательности одного или более откликов в буровой системе. Один или более откликов могут быть измерены в стволе скважины, в котором осуществляют операции бурения, и на поверхности ствола скважины. Способ может включать изменение модели буровой системы на основании по меньшей мере части одного или более откликов, которые были измерены во время выполнения по меньшей мере одной автоматизированной последовательности. 3 н. и 11 з.п. ф-лы, 5 ил.
1. Способ характеристики откликов в буровой системе, согласно которому:
определяют по меньшей мере одну автоматизированную последовательность, подлежащую выполнению во время осуществления части операции бурения с помощью буровой системы, причем по меньшей мере одна автоматизированная последовательность представляет собой последовательность операций, содержащих один или более рабочих параметров, которые изменяются в течение периода времени;
выполняют во время осуществления операции бурения по меньшей мере одну автоматизированную последовательность, причем выполнение по меньшей мере одной автоматизированной последовательности содержит автоматическую настройку одного или более рабочих параметров в различные значения времени и на основе одного или более отклика, которые обнаружены в буровой системе;
измеряют во время выполнения по меньшей мере одной автоматизированной последовательности один или более откликов в буровой системе, причем один или более откликов измеряют в стволе скважины, в котором осуществляют операции бурения, и на поверхности ствола скважины; и
модифицируют модель буровой системы на основании по меньшей мере части одного или более откликов, которые были измерены во время выполнения по меньшей мере одной автоматизированной последовательности,
причем последовательности операций содержат одно или более из:
последовательности отрыва и поднятия от забоя, спуска и задания крутящего момента при различных скоростях;
последовательности для прекращения расхода и оборотов в минуту в конце наращивания бурильной колонны, а также увеличения расхода и числа оборотов в минуту в начале наращивания бурильной колонны;
последовательности перемещения блока вверх и вниз для охарактеризования трения на шкиве талевого блока и исключения влияния на вычисления нагрузки на долото (WOB) и нагрузки на крюк;
последовательности ступенчатого увеличения нагрузки на долото (WOB) при постоянном числе оборотов минуту для определения точки, в которой система обеспечения вращения начинает работать неустойчиво и входит в установившийся режим прерывистого перемещения;
последовательности, которая перемещает блок вниз на различных скоростях; и
последовательности, которая развертывается в диапазоне значений числа оборотов в минуту на поверхности на некотором расстоянии от забоя для определения местоположения резонансов изгибных колебаний узла нижней части бурильной колонны (ВНА);
последовательности для охарактеризования взаимосвязей между одним или более рабочими параметрами и колебаниями узла нижней части бурильной колонны (ВНА) во время осуществления операций бурения;
последовательности, в которой система SLIDER® циклизирует крутящий момент для улучшения передачи нагрузки и управления положением отклонителя с помощью скважинной обратной связи в виде положения отклонителя узла нижней части бурильной колонны (ВНА);
последовательности, которая инициирует изменение нагрузки при бурении с помощью двигателя и вращении, а также измерение давления; и
последовательности, которая автоматически модулирует частоту хода поршня бурового насоса;
последовательности контроля изменения нагрузки на крюк на поверхности в диапазоне циркуляционного расхода при вращении на некотором расстоянии от забоя;
последовательности, которая инициирует накачивание бурового раствора при различных значениях расхода;
последовательности, которая динамически настраивает коэффициент усиления установки автоматического бурения на основании полученной модели взаимодействий шарошечного долота в режиме реального времени;
последовательности, которая инициирует изменение расхода и измерение частоты вращения двигателя;
последовательности, которая инициирует изменение расхода и нагрузки на долото (WOB) и измерение частоты вращения двигателя и давления; и
последовательности, которая инициирует изменение по меньшей мере одного из частоты вращения или расхода и измерение температуры вдоль бурильной колонны.
2. Способ по п. 1, согласно которому один или более рабочих параметров включает или включают расход бурового раствора, частоту вращения бурильной колонны, движение узла нижней части бурильной колонны и пределы безопасности буровой системы.
3. Способ по п. 1, согласно которому один или более откликов измеряют с помощью датчиков, расположенных в одном или более местоположений, включая расположение на поверхности буровой системы, расположение в стволе скважины, расположение на бурильной колонне и расположение в узле нижней части бурильной колонны.
4. Способ по п. 1, который также включает:
сохранение одного или более откликов в буровой системе.
5. Способ по п. 1, который также включает:
определение перед выполнением по меньшей мере одной автоматизированной последовательности того, чтобы для по меньшей мере одной автоматизированной последовательности требовалось обновление, основанное по меньшей мере частично на изменении условий в операции бурения; и
обновление по меньшей мере одной автоматизированной последовательности в ответ на изменение условий в операции бурения.
6. Энергонезависимый считываемый компьютером носитель информации, содержащий команды, инициирующие выполнение с помощью одного или более процессоров способа, согласно которому:
определяют по меньшей мере одну автоматизированную последовательность, подлежащую выполнению во время осуществления части операции бурения с помощью буровой системы, причем по меньшей мере одна автоматизированная последовательность представляет собой последовательность операций, содержащих один или более рабочих параметров, которые изменяются в течение периода времени;
выполняют во время осуществления операции бурения по меньшей мере одну автоматизированную последовательность, причем выполнение по меньшей мере одной автоматизированной последовательности содержит автоматическую настройку одного или более рабочих параметров в различные значения времени и на основе одного или более откликов, которые обнаружены в буровой системе;
измеряют во время выполнения по меньшей мере одной автоматизированной последовательности один или более откликов в буровой системе, причем один или более откликов измеряют в стволе скважины, в котором осуществляют операции бурения, и на поверхности ствола скважины; и
изменяют модель буровой системы на основании по меньшей мере части одного или более откликов, которые были измерены во время выполнения по меньшей мере одной автоматизированной последовательности,
причем последовательности операций содержат одно или более из:
последовательности отрыва и поднятия от забоя, спуска и задания крутящего момента при различных скоростях;
последовательности для прекращения расхода и оборотов в минуту в конце наращивания бурильной колонны, а также увеличения расхода и числа оборотов в минуту в начале наращивания бурильной колонны;
последовательности перемещения блока вверх и вниз для охарактеризования трения на шкиве талевого блока и исключения влияния на вычисления нагрузки на долото (WOB) и нагрузки на крюк;
последовательности ступенчатого увеличения нагрузки на долото (WOB) при постоянном числе оборотов минуту для определения точки, в которой система обеспечения вращения начинает работать неустойчиво и входит в установившийся режим прерывистого перемещения;
последовательности, которая перемещает блок вниз на различных скоростях; и
последовательности, которая развертывается в диапазоне значений числа оборотов в минуту на поверхности на некотором расстоянии от забоя для определения местоположения резонансов изгибных колебаний узла нижней части бурильной колонны (ВНА);
последовательности для охарактеризования взаимосвязей между одним или более рабочими параметрами и колебаниями узла нижней части бурильной колонны (ВНА) во время осуществления операций бурения;
последовательности, в которой система SLIDER® циклизирует крутящий момент для улучшения передачи нагрузки и управления положением отклонителя с помощью скважинной обратной связи в виде положения отклонителя узла нижней части бурильной колонны (ВНА);
последовательности, которая инициирует изменение нагрузки при бурении с помощью двигателя и вращении, а также измерение давления; и
последовательности, которая автоматически модулирует частоту хода поршня бурового насоса;
последовательности контроля изменения нагрузки на крюк на поверхности в диапазоне циркуляционного расхода при вращении на некотором расстоянии от забоя;
последовательности, которая инициирует накачивание бурового раствора при различных значениях расхода;
последовательности, которая динамически настраивает коэффициент усиления установки автоматического бурения на основании полученной модели взаимодействий шарошечного долота в режиме реального времени;
последовательности, которая инициирует изменение расхода и измерение частоты вращения двигателя;
последовательности, которая инициирует изменение расхода и нагрузки на долото (WOB) и измерение частоты вращения двигателя и давления; и
последовательности, которая инициирует изменение по меньшей мере одного из частоты вращения или расхода и измерение температуры вдоль бурильной колонны.
7. Энергонезависимый считываемый компьютером носитель информации по п. 6, в котором один или более рабочих параметров включают расход бурового раствора, частоту вращения бурильной колонны, движение узла нижней части бурильной колонны и пределы безопасности буровой системы.
8. Энергонезависимый считываемый компьютером носитель информации по п. 6, в котором один или более откликов измеряют с помощью датчиков, расположенных в одном или более местоположениях, включая расположение на поверхности буровой системы, расположение в стволе скважины, расположение на бурильной колонне и расположение в узле нижней части бурильной колонны.
9. Энергонезависимый считываемый компьютером носитель информации по п. 6, причем способ также включает:
сохранение одного или более откликов в буровой системе.
10. Энергонезависимый считываемый компьютером носитель информации по п. 6, причем способ также включает:
определение перед выполнением по меньшей мере одной автоматизированной последовательности того, чтобы для по меньшей мере одной автоматизированной последовательности требовалось обновление, основанное по меньшей мере частично на изменении условий в операции бурения; и
обновление по меньшей мере одной автоматизированной последовательности в ответ на изменение условий в операции бурения.
11. Система для характеристики откликов в буровой системе, содержащая:
одно или более запоминающих устройств, хранящих команды; и
один или более процессоров, подключенных к запоминающим устройствами и выполненных с возможностью выполнения команд для осуществления способа, согласно которому:
определяют по меньшей мере одну автоматизированную последовательность, подлежащую выполнению во время осуществления части операции бурения с помощью буровой системы, причем по меньшей мере одна автоматизированная последовательность представляет собой последовательность операций, содержащих один или более рабочих параметров, которые изменяются в течение периода времени;
выполняют во время осуществления операции бурения по меньшей мере одну автоматизированную последовательность, причем выполнение по меньшей мере одной автоматизированной последовательности содержит автоматическую настройку одного или более рабочих параметров в различные значения времени и на основе одного или более откликов, которые обнаружены в буровой системе;
измеряют во время выполнения по меньшей мере одной автоматизированной последовательности один или более откликов в буровой системе, причем один или более откликов измеряют в стволе скважины, в котором осуществляют операции бурения, и на поверхности ствола скважины; и
изменяют модель буровой системы на основании по меньшей мере части одного или более откликов, которые были измерены во время выполнения по меньшей мере одной автоматизированной последовательности,
причем последовательности операций содержат одно или более из:
последовательности отрыва и поднятия от забоя, спуска и задания крутящего момента при различных скоростях;
последовательности для прекращения расхода и оборотов в минуту в конце наращивания бурильной колонны, а также увеличения расхода и числа оборотов в минуту в начале наращивания бурильной колонны;
последовательности перемещения блока вверх и вниз для охарактеризования трения на шкиве талевого блока и исключения влияния на вычисления нагрузки на долото (WOB) и нагрузки на крюк;
последовательности ступенчатого увеличения нагрузки на долото (WОB) при постоянном числе оборотов минуту для определения точки, в которой система обеспечения вращения начинает работать неустойчиво и входит в установившийся режим прерывистого перемещения;
последовательности, которая перемещает блок вниз на различных скоростях; и
последовательности, которая развертывается в диапазоне значений числа оборотов в минуту на поверхности на некотором расстоянии от забоя для определения местоположения резонансов изгибных колебаний узла нижней части бурильной колонны (ВНА);
последовательности для охарактеризования взаимосвязей между одним или более рабочими параметрами и колебаниями узла нижней части бурильной колонны (ВНА) во время осуществления операций бурения;
последовательности, в которой система SLIDER® циклизирует крутящий момент для улучшения передачи нагрузки и управления положением отклонителя с помощью скважинной обратной связи в виде положения отклонителя узла нижней части бурильной колонны (ВНА);
последовательности, которая инициирует изменение нагрузки при бурении с помощью двигателя и вращении, а также измерение давления; и
последовательности, которая автоматически модулирует частоту хода поршня бурового насоса;
последовательности контроля изменения нагрузки на крюк на поверхности в диапазоне циркуляционного расхода при вращении на некотором расстоянии от забоя;
последовательности, которая инициирует накачивание бурового раствора при различных значениях расхода;
последовательности, которая динамически настраивает коэффициент усиления установки автоматического бурения на основании полученной модели взаимодействий шарошечного долота в режиме реального времени;
последовательности, которая инициирует изменение расхода и измерение частоты вращения двигателя;
последовательности, которая инициирует изменение расхода и нагрузки на долото (WOB) и измерение частоты вращения двигателя и давления; и
последовательности, которая инициирует изменение по меньшей мере одного из частоты вращения или расхода и измерение температуры вдоль бурильной колонны.
12. Система по п. 11, в которой один или более рабочих параметров включают расход бурового раствора, частоту вращения бурильной колонны, движение узла нижней части бурильной колонны и пределы безопасности буровой системы.
13. Система по п. 11, в которой один или более откликов измеряют с помощью датчиков, расположенных в одном или более местоположениях, включая расположение на поверхности буровой системы, расположение в стволе скважины, расположение на бурильной колонне и расположение в узле нижней части бурильной колонны.
14. Система по п. 11, причем способ также включает:
определение перед выполнением по меньшей мере одной автоматизированной последовательности того, чтобы для по меньшей мере одной автоматизированной последовательности требовалось обновление, основанное по меньшей мере частично на изменении условий в операции бурения; и
обновление по меньшей мере одной автоматизированной последовательности в ответ на изменение условий в операции бурения.
| US 8561720 B2, 22.10.2013 | |||
| US 20030168257 A1, 11.09.2003 | |||
| US 20150101865 A1, 16.04.2015 | |||
| US 6272434 B1, 07.08.2001. |

