Область техники
Изобретение относится к космической технике, а именно к способу определения ориентации космического аппарата (КА) в пространстве с автономной коррекции эффекта аберрации света, возникающего из-за движения космического аппарата в пространстве, искажающего показания звездных датчиков (ЗД) ориентации.
Заявляемое изобретение также может быть использовано и для автономного определения вектора пространственной скорости КА в инерциальной системе координат.
Уровень техники
Определение ориентации космического аппарата в пространстве относительно выбранной системы координат необходимо для выполнения большинства действий в космическом пространстве. Наиболее надежными и точными устройствами для определения ориентации КА на сегодняшний день являются звездные датчики ориентации. Погрешности серийно выпускаемых сегодня звездных датчиков составляют единицы угловых секунд, появляются прототипы изделий с субарксекундыми точностями. Однако показания звездных датчиков искажаются эффектом аберрации света, вызываемые им систематические погрешности в десятки раз превышают точности современных звездных датчиков.
Из уровня техники известен эффект аберрации света - изменение видимого направления распространения излучения при переходе из одной системы отсчета к другой. При астрономических наблюдениях аберрация света приводит к изменению видимого положения звезд на небесной сфере вследствие движения наблюдателя вместе с Землей и Солнечной системой [1]. Эффект зависит только от скорости наблюдателя относительно опорной системы отсчета, которая была принята за неподвижную. При наблюдениях с Земли различают годичную, суточную и вековую аберрации. Годичная аберрация связана с движением Земли вокруг Солнца. Суточная - обусловлена вращением Земли вокруг своей оси. Вековая аберрация учитывает эффект движения Солнечной системы вокруг центра Галактики. Для космических аппаратов существует аберрация света, связанная с их орбитальным движением.
Годичная аберрация света из-за движения Земли со скоростью 30 км/с по почти круговой орбите вокруг Солнца приводит к смещению звезд с амплитудой до 20'', но это медленное смещение, с периодом в один год. Для КА на низкой околоземной орбите, которые движутся со скоростью около 8 км/с, амплитуда аберрации света может достигать 5'', но направление эффекта быстро меняется и зависит от ориентации и параметров орбиты КА.
Современные звездные датчики [2] состоят из объектива, матричного фотоприемника (ПЗС или КМОП матрицы) и блока электроники. Объектив и матричный фотоприемник, а также некоторые дополнительные части звездного датчика (корпус, бленда и т.д.) объединяются в оптическую головку датчика. Работа звездного датчика ориентации происходит следующим образом: объектив строит на матричном фотоприемнике изображение участка звездного неба, попадающего в пределы поля зрения датчика. Производится экспозиция матричного фотоприемника и с него считывается кадр с электронным изображением этого участка неба. В кадре выделяются изображения звезд и определяются их координаты в системе координат, связанной с матричным приемником излучения. Полученный звездный узор сравнивается с бортовым каталогом звезд, при этом часть звезд в кадре отождествляется с навигационными звездами из бортового каталога. Для отождествленных звезд измерены координаты в системе координат матричного фотоприемника и известны небесные координаты (чаще всего, экваториальные) из бортового каталога звезд. Наличие этих двух наборов координат позволяет определить разворот системы координат звездного датчика относительно инерциальной системы координат, связанной со звездами, и вычислить параметры ориентации в ожидаемом виде (углы Эйлера, матрица 3-мерного поворота, кватернион поворота и т.д., перечисленные представления ориентации эквивалентны друг другу).
Эффект аберрации света приводит к тому, что направление, определяемое звездным датчиком ориентации, отличается от истинного - измеренного аналогичным звездным датчиком, неподвижным относительно опорной системы отсчета. Для компенсации этого эффекта на низкой орбите вокруг Земли необходимо задавать вектор скорости движения КА каждые 30-60 с, что создает большую вычислительную нагрузку на бортовые системы КА и требуем знания скорости орбитального движения КА с высокой точностью.
Для коррекции эффекта аберрации света необходимо определить вектор пространственной скорости КА относительно, например, барицентра Солнечной системы. В настоящее время существуют несколько способов определения вектора пространственной скорости, каждый из них имеет свои недостатки и ограничения.
Первый способ - определение орбиты КА по его наблюдениям с Земли или с других КА. При этом для КА, обращающихся вокруг Земли, чаще используют позиционные наблюдения в видимом диапазоне [3], а для межпланетных КА - радиоинтеферометрия [4]. Зная орбиту КА можно вычислить его скорость в любой ее точнее и в любой момент времени. Этот способ не является автономным - наблюдения и их обработка проводятся с помощью внешней инфраструктуры, а полученные данные (о скорости или об орбите) передаются на борт КА по каналам связи.
К недостаткам этого способа относится необходимость связи с Землей и наличие обширной инфраструктуры (сети наземных или космических наблюдательных станций) для получения данных об орбитах КА.
Остальные способы, описанные ниже, являются автономными.
Второй способ - определение пространственной скорости по сигналам спутниковой глобальной системе позиционирования, подобной GPS или ГЛОНАСС [5]. Однако данный способ работает только в окрестностях Земли, охватываемых системами GPS или ГЛОНАСС. Кроме того, для него необходимо постоянное обновление альманаха спутниковой системы позиционирования, содержащего сведения об орбитах спутников системы.
Третий способ - пульсарная навигация, скорость определяется по высокопериодическим импульсам, приходящим от естественных объектов -рентгеновских или радио пульсаров (см., например, патент RU 2453813). Этот способ работает во всей Солнечной системе и даже за ее пределами. Недостаток этого способа связан со свойствами реперных объектов, систематическим изменением их периодов и скачками периодов - так называемыми «глитчами». Еще один недостаток - низкий уровень принимаемого сигнала - для его регистрации требуется дорогая и сложная аппаратура - антенны диаметром несколько метров при работе в радиодиапазоне или детекторы площадью несколько квадратных метров в рентгеновском диапазоне. Подобную аппаратуру можно установить не на всякий космический аппарат.
Известен четвертый способ и реализующее его устройство для автономной навигации в дальних космических полетах с использованием Солнца в качестве ориентира путем определения орбиты космического аппарата на основе наблюдений Солнца с помощью расположенных на аппарате устройств (патент US 6622970 В2). На аппарате располагается датчик направления на Солнце, а также измеритель лучевой (радиальной) скорости аппарата относительно Солнца, основанный на эффекте Доплера. В данном решении предполагается использование специального датчика направления на Солнце, который определяет это направление не только относительно космического аппарата, но и относительно звезд (т.е. относительно связанной со звездами инерциальной системы координат). Серия наблюдений, одновременно проведенная этими двумя приборами, позволяет определить орбиту космического аппарата вокруг Солнца и, соответственно, его скорость в пространстве. Недостатком этого решения является очень высокая сложность второго используемого прибора для определения лучевой скорости: для получения ее с необходимой высокой точностью необходимо использовать спектрометр (спектрограф) достаточно высокого разрешения, который обычно требует точного (не хуже 0,5) наведения на Солнце, анализа спектра Солнца и т.д., что заметно повышает стоимость реализации предлагаемого технического решения, снижает его надежность (из-за наличия подвижных частей в конструкции). Кроме того часть устройства для определения лучевой скорости относительно Солнца имеет большую массу и габариты. Этот способ не позволяет определить скорость КА по одному наблюдению, а только после проведения серии наблюдений.
Известны также способ и устройство автономного определения скорости (патент US 5109346, прототип), согласно которым одновременно наблюдают направления на Солнце, Луну и центр Земли, что позволяет автономным образом определять положение КА в околоземном пространстве. Это изобретение имеет ряд недостатков: при использовании для наблюдения перечисленных небесных объектов широкоугольных оптических систем, охватывающих существенную часть небесной сферы (в идеале - всю небесную сферу), измерения видимых положений этих объектов будут осуществляться с низкой точностью, соответственно, низкой будет и точность навигации. Если же для наблюдения будут использованы более точные оптические системы с узкими полями зрения, то потребуются дополнительные механизмы для наведения этих оптических систем на объекты и удержания объектов в пределах полей зрения оптических систем все время проведения наблюдений. Это приводит к усложнению конструкции аппарата, увеличению ее массы, габаритов и стоимости, а также к снижению надежности. Кроме того результатом применения этого изобретения является определение именно положения космического аппарата в пространстве. Его скорость при этом напрямую не определяется. Для ее получения надо провести несколько измерений положения космического аппарата и поделить полученное смещение на время между наблюдениями. Подобная процедура может потребовать много времени и приводит к большим ошибкам определения скорости при малых промежутках времени между измерениями.
Общим недостатком всех перечисленных автономных способов определения пространственной скорости КА является то, что для их реализации на борт КА необходимо устанавливать дополнительную аппаратуру.
Технической проблемой является определение ориентации КА в пространстве с возможностью автономного (основываясь только на показаниях звездных датчиков, установленных на борту КА без использования наземных измерительных средств, а также дополнительной аппаратуры на борту КА) определения и учета эффекта аберрации света.
Определение ориентации космического аппарата в пространстве относительно выбранной системы координат необходимо для выполнения большинства действий при его функционировании. Современные серийно выпускаемые звездные датчики определяют ориентацию с погрешностью в 1''-3'', появляются образцы звездных датчиков следующего поколения, имеющих точность 0,2''-0,5''. Эффект аберрации света вносит в показания современных датчиков систематическую ошибку в несколько раз большую их случайной погрешности (для датчиков следующего поколения эта ошибка будет в несколько десятков раз больше их погрешности).
Для учета аберрации света необходимо с высокой точностью знать величину и скорость движения КА в пространстве и с достаточной высокой частотой обновлять эти значения. Выполнение процедур по периодическому вычислению текущих значений скорости КА с высокой точностью ложится на бортовые ресурсы КА и вызывает их заметную загрузку.
Отказ от учета эффекта аберрации света или неполный его учет (из-за низкой точности или частоты вычисления текущей скорости КА) снижает точность определения ориентации звездным датчиком до 10''-20''. Таким образом, использование звездного датчика с малыми случайными ошибками, становится нецелесообразным.
Раскрытие изобретения
Технический результат - повышение точности определение ориентации КА в пространстве, возможность сохранения высокой точности определения ориентации КА вдали от Земли или в отсутствии связи с Землей.
Технический результат достигается за счет использования системы для определения пространственной ориентации КА с автономной коррекцией эффекта аберрации света, вектора пространственной скорости КА, включающей установленные на борту КА блок звездных датчиков - не менее трех, закрепленных на общем основании таким образом, что оптические оси датчиков попарно не параллельны друг другу с заданными (известными) углами между их оптическими осями, определяемыми расположением звездных датчиков на основании, и блок обработки данных, полученных от звездных датчиков, снабженные блоками питания, где
блок звездных датчиков (ЗД) выполнен с возможностью одновременного проведения измерений входящими в него звездными датчиками, при этом каждый из звездных датчиков в блоке выполнен с возможностью определения направления оптической оси (оси визирования) ЗД в инерциальной системе координат посредством определения координат центров полей зрения датчиков и угла разворота поля зрения вокруг его центра с получением предварительных параметров ориентации КА;
блок обработки выполнен с возможностью определения по одновременно измеренным предварительным параметрам ориентации КА углов между оптическими осями ЗД в инерциальной системе координат, по меньшей мере, трех пар ЗД, сравнения полученных углов с заданными (известными) значениями углов между оптическими осями ЗД с последующим определением вектора пространственной скорости КА в инерциальной системе координат, определением эффекта аберрации света и его учетом при определении пространственной ориентации КА.
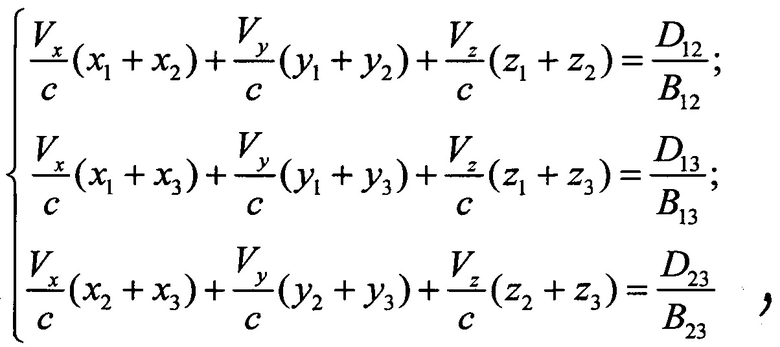
При использовании трех звездных датчиков определение вектора пространственной скорости КА в инерциальной системе координат в блоке обработки может быть реализовано посредством выполнения следующего условия:

где Vx, Vy, Vz - компоненты пространственной скорости в системе координат устройства, (x1,y1,z1) - координаты единичного вектора, направленного вдоль оси визирования 1-го звездного датчика (оптической головки) в системе координат устройства, (x2,y2,z2) - то же для 2-го звездного датчика, (x3,y3,z3) - то же для 3-го звездного датчика, В12=1-cosψ12, a ψ12 - угол между осями визирования 1-го и 2-го звездных датчиков в системе координат устройства, В13=1-cosψ13, а ψ13 - угол между осями визирования 1-го и 3-го звездных датчиков в системе координат устройства, В23=1-cosψ23, a ψ23 - угол между осями визирования 2-го и 3-го звездных датчиков в системе координат устройства, D12=cosψ'12-cosψ'12, a ψ'12 - угол между видимым (определяемыми) направлениями осей визирования 1-го и 2-го звездных датчиков, D13=cosψ'13-cosψ13, а ψ'13 - угол между видимым (определяемыми) направлениями осей визирования 1-го и 3-го звездных датчиков, D23=cosψ'23-cosψ23, а ψ'23 - угол между видимым (определяемыми) направлениями осей визирования 2-го и 3-го звездных датчиков, с - скорость света.
При использовании более трех звездных датчиков ориентации определение вектора пространственной скорости КА в инерциальной системе координат в блоке обработки может быть реализовано посредством выполнения следующего условия:

где Vx, Vy, Vz - компоненты пространственной скорости в системе координат устройства, (xi,yi,zi) - координаты единичного вектора, направленного вдоль оси визирования i-го звездного датчика (оптической головки) в системе координат устройства, Bij=1-cosψij, a ψij - угол между осями визирования i-го и j-го звездных датчиков в системе координат устройства, Djj=cosψ'ij-cosψij, a ψ'ij - угол между видимым (определяемыми) направлениями осей визирования i-го и j-го звездных датчиков, с - скорость света.
Корректировка предварительных параметров ориентации КА может быть осуществлена по формуле:

где  - видимое направление оси визирования i-го звездного датчика, искаженное эффектом аберрации света,
- видимое направление оси визирования i-го звездного датчика, искаженное эффектом аберрации света,  - истинное направление оси визирования этого датчика,
- истинное направление оси визирования этого датчика,  - вектор пространственной скорости КА, с - скорость света, знаком «×» обозначено векторное произведение векторов.
- вектор пространственной скорости КА, с - скорость света, знаком «×» обозначено векторное произведение векторов.
Технический результат достигается также посредством использования способа определения пространственной ориентации КА, с помощью системы, описанной выше, который включает одновременное измерение координат центров полей зрения датчиков в процессе движения КА, по которым определяют углы между центрами полей зрения не менее трех пар датчиков, после чего определяют величины отклонений измеренных углов от заданных, по которым определяют вектор пространственной скорости КА, после чего определяют эффект аберрации света и учитывают его при определении пространственной ориентации КА.
В состав устройства определения ориентации КА в пространстве с автономной коррекцией аберрации света входят механическое основание, на которое крепятся три или более автономных звездных датчика ориентации или оптических головок звездных датчиков ориентации, и блок управления. Оси оптических систем звездных датчиков (оптических головок) не должны быть параллельны друг другу ни у одной пары датчиков.
Звездные датчики в составе устройства являются автономными приборами и состоят из оптической системы (объектива), матричного приемника излучения, расположенного в фокальной плоскости оптической системы и блока электроники, который осуществляет прием и выполнение команд управления звездным датчиком (приходящих от бортовых систем КА), управление матричным фотоприемником, считывание и оцифровку получаемого фотоприемником изображения, обработку полученного изображения и вычисление параметров ориентации конструкционной системы координат относительно инерциальной системы координат. В постоянной памяти блока электроники звездного датчика хранится бортовой каталог навигационных звезд, служебные данные и алгоритмы обработки изображений звездного неба.
Звездные датчики являются автономными, все необходимые действия от получения внешней команды на измерение ориентации до выдачи параметров ориентации относительно инерциальной системы координат осуществляются внутри звездного датчика его собственными средствами. В отличие от автономного датчика ориентации оптическая головка содержит минимально необходимый набор электронных компонентов для управления фотоприемником, считывания и оцифровки получаемого изображения неба, который не может выполнять более сложные функции, перечисленные выше. В этом случае электронные компоненты, необходимые для выполнения этих более сложных операций, включаются в состав блока управления устройства.
В устройстве для определения ориентации в пространстве с автономной коррекцией эффекта аберрации света присутствует собственный блок управления, который выполняет совместную обработку показаний звездных датчиков. При использовании в устройстве не автономных звездных датчиков, а оптических головок, блоку управления устройства передаются все или наиболее сложные функции выполняемые блоками электроники автономных звездных датчиков.
Работа устройства осуществляется следующим образом. Блок управления устройства одновременно подает на звездные датчики (или оптические головки) команды проведения определения ориентации. Звездные датчики выполняют экспонирование участков звездного неба, попадающих в их поля зрения, обрабатывают полученные изображения, вычисляют параметры ориентации каждого из датчиков и передают их в блок управления. Блок управления устройства получает и совместно обрабатывает показания всех звездных датчиков. В результате обработки этих данных получают исправленные за влияние эффекта аберрации света направления осей визирования звездных датчиков в инерциальной системе координат. Дополнительно в явном виде могут быть получены следующие величины: абсолютная величина (модуль) пространственной скорости устройства (и КА) относительно барицентра Солнечной системы; направление этой скорости в инерциальной системе координат и в системе конструкционных координат устройства. Дополнительные величины определяются и передаются потребителю устройства при необходимости (по его требованию).
Возможно несколько иное построение заявляемого устройства. В состав устройства входят механическое основание, на которое крепятся три или более оптических головок, и блок управления. Оптические оси оптических головок не должны быть параллельны друг другу. Оптическая головка отличается от звездного датчика тем, что в ее состав входит минимальный набор электроники (электронных компонентов), который обеспечивает управление матричным фотоприемником, считывает и переводит в цифровую форму полученное изображение, и затем передает его в блок управления. В этом варианте конструкции устройства та часть блоков электроники звездных датчиков, которая занималась обработкой полученных кадров после их оцифровки и вычислением параметров ориентации, теперь включена в состав блока управления устройства.
Вариант устройства с оптическими головками может быть дешевле, при этом в первом варианте можно использовать стандартные, промышленно выпускаемые, звездные датчики, что упрощает разработку и изготовление устройства.
Краткое описание чертежей
Изобретение поясняется чертежами.
Позициями на чертежах обозначены: 1, 2, 3 и 4 - звездные датчики (на некоторых иллюстрациях присутствуют только 3 ЗД с номерами 1, 2 и 3), 5 - механическое основание, 6, 7, 8 и 9 - прямоугольные системы координат, связанные с ЗД обозначенными позициями 1, 2, 3 и 4, соответственно, 10 - прямоугольная система координат устройства в целом, связанная с механическим основанием, 11 - соединительные кабели.
На фиг. 1 представлена иллюстрация возникновения эффекта аберрации света. Для неподвижного звездного датчика звезда находится в положении (А), луч света от нее образует угол θ с горизонтальной линией. Датчик начинает двигаться по горизонтали направо со скоростью ν. За время прохождения светом расстояния от объектива датчика до фотоприемника, равное h, датчик перемещается по горизонтали на расстоянии (ν/с)⋅h. Для движущегося датчика та же звезда будет видна в направлении (В), которое образует с горизонталью угол ϕ, меньший, чем θ, т.е. смещается в направлении движения датчика. Величина угла смещения δθ=θ-ϕ пропорционален отношению скорости ν к скорости света с.
На фиг. 2 представлен звездный датчик «Hydra» с тремя оптическими головками производства фирмы Sodern (Франция).
На фиг. 3 представлена иллюстрация влияния аберрации света на устройство с тремя звездными датчиками (оптическими головками). У неподвижного устройства единичные вектора, направленные вдоль осей визирования звездных датчиков  , i=1…3 совпадают с векторами, направленными в центры полей зрения этих датчиков. Если устройство движется со скоростью
, i=1…3 совпадают с векторами, направленными в центры полей зрения этих датчиков. Если устройство движется со скоростью  , то направления в центры полей зрения звездных датчиков
, то направления в центры полей зрения звездных датчиков  , i-1…3 смещаются в сторону вектора скорости
, i-1…3 смещаются в сторону вектора скорости  под действием аберрации света. Каждая тройка векторов
под действием аберрации света. Каждая тройка векторов  и
и  лежит в одной плоскости, причем вектор
лежит в одной плоскости, причем вектор  лежит между векторами
лежит между векторами  и
и  . Угол между векторами
. Угол между векторами  и
и  зависит от модуля скорости
зависит от модуля скорости  и от угла между векторами
и от угла между векторами  и
и  в соответствии с формулой (1.1).
в соответствии с формулой (1.1).
На фиг. 4 представлена иллюстрация соотношения между частями устройства и связанными с ними системами координат. На чертеже показано механическое основание (5) и три звездных датчика (или оптических головки) (1), (2) и (3), прикрепленных к механическому основанию (5). С каждой из этих частей устройства связана своя система координат. С механическим основанием (5) связана единая система координат устройства (10). Ее оси координат ( ) на чертеже показаны толстыми сплошными стрелками. С каждым из звездных датчиков связана собственная система координат: с датчиком (1) - система координат (6) с осями (
) на чертеже показаны толстыми сплошными стрелками. С каждым из звездных датчиков связана собственная система координат: с датчиком (1) - система координат (6) с осями ( ), с датчиком (2) - система координат (7) с осями (
), с датчиком (2) - система координат (7) с осями ( ), с датчиком (3) - система координат (8) с осями (
), с датчиком (3) - система координат (8) с осями ( ). Оси этих систем координат показаны более тонкими пунктирными стрелками. Все системы координат являются ортогональными и правыми. Номера систем координат на чертеже не показаны.
). Оси этих систем координат показаны более тонкими пунктирными стрелками. Все системы координат являются ортогональными и правыми. Номера систем координат на чертеже не показаны.
На фиг. 5 показано устройство с четырьмя звездными датчиками на жестком механическом основании, иллюстрирующее 1-й пример реализации устройства. Номерами на чертеже обозначены следующие элементы устройства: (5) - жесткое механическое основание, звездные датчики - (1), (2), (3) и (4). (Последняя цифра номера на рисунке соответствует номеру звездного датчика.) Соединительные кабели на фиг. 5 не показаны.
На фиг. 6 показан блок управления, иллюстрирующий 1-й пример реализации устройства. Этот блок управления негерметичный, он устанавливается на внешней стороне КА.
На фиг. 7 показано устройство с тремя звездными датчиками на механическом основании, иллюстрирующее 2-й пример реализации устройства. Номерами на чертеже обозначены следующие элементы устройства: (5) - механическое основание, звездные датчики - (1), (2) и (3) (последняя цифра номера на рисунке соответствует номеру звездного датчика.), (11) - соединительные кабели.
На фиг. 8 показан блок управления, иллюстрирующий 2-й пример реализации устройства. Этот блок управления устанавливается в герметичном внутреннем отсеке КА, заполненным газом.
Осуществление изобретения
Звездный датчик определяет свою ориентацию по наблюдениям звезд, небесные координаты которых, хранящиеся в бортовом каталоге навигационных звезд, заданы в известной системе координат (чаще всего используется экваториальная небесная система координат). В ходе функционирования звездного датчика его ориентация определяется относительно той системы координат, в которой заданы координаты звезд. Ориентация датчика описывается тремя независимыми параметрами. Одно из возможных представлений параметров ориентации состоит в задании трех углов, два из которых являются небесными (угловыми) координатами центра поля зрения звездного датчика, а третий задает величину поворота звездного датчика вокруг оси визирования, направленной в центр поля зрения, относительно определенного направления (например, направления на северный полюс мира для экваториальной системы координат).
При той же ориентации в пространстве центр изображения в поле зрения звездного датчика будет смещен относительно центра изображения в поле зрения аналогичного и также ориентированного, но неподвижного звездного датчика (см. фиг. 1). Это смещение называется эффектом аберрации света и связано с конечностью скорости света.
Смещение изображений звезд под действием эффекта аберрации света описывается следующее формулой

здесь ν - скорость движения прибора, с - скорость света, θ - угол между вектором скорости и направлением на наблюдаемую звезду, δθ - изменение угла θ из-за аберрации света, знак минус означает, что угол θ уменьшается - звезда смещается вперед по направлению скорости.
Способы автономной коррекции эффекта аберрации света и определения вектора пространственной скорости КА состоят в следующем. Получают показания от трех или большего числа звездных датчиков, установленных на борту космического аппарата (КА), направленных на различные точки небесной сферы. Вычисляют углы между видимыми положениями центров полей зрения не менее чем у трех пар звездных датчиков. Физические углы между осями визирования этих же пар звездных датчиков известны из геометрии конструкции устройства.
Когда устройство неподвижно, углы между центрами полей зрения звездных датчиков с точностью до погрешностей измерения будут совпадать с углами между видимыми направлениями соответствующих пар осей визирования. Если устройство движется, то изображения в поле зрения каждого из датчиков под действием эффекта аберрации света смещается в направлении движения КА. Смещения будут разными - скорость движения имеет одинаковое значение для всех датчиков устройства, но углы между осями визирования датчиков и направлением скорости различаются. В результате этого углы между центрами полей зрения, вычисленные по одновременным показаниям звездных датчиков, будут отличаться от известных из геометрии конструкции устройства физически измеренных углов между их осями визирования. Зная отличия этих углов и направления осей визирования звездных датчиков в конструкционной системе координат, можно определить вектор скорости движения устройства в конструкционной системе координат. Знание ориентации КА, получаемое теми же звездными датчиками, позволяет вычислить вектор скорости КА в инерциальной системе координат. Знание величины скорости КА и углов между ней и осями визирования звездных датчиков позволяет определить отклонения, вызываемые эффектом аберрации света и учесть их в показаниях каждого из звездных датчиков.
В результате совместной обработки одновременно полученных показаний трех или более звездных датчиков могут быть получены следующие величины: абсолютная величина пространственной скорости устройства относительно барицентра Солнечной системы, направление этой скорости в инерциальной системе координат и в системе конструкционных координат устройства, направление осей визирования звездных датчиков с учетом и без учета эффекта аберрации света в инерциальной и конструкционной системах координат, равноточная по всем осям ориентация устройства относительно инерциальной системы координат с учетом эффекта аберрации света. По требованию потребителей устройства могут вычисляться и выдаваться не все перечисленные величины.
В состав устройства, реализующего способ автономной коррекции эффекта аберрации света и способ определения вектора пространственной скорости КА, входят механическое основание, на которое крепятся три или более автономных звездных датчиков ориентации или оптических головок звездных датчиков ориентации, блока управления, а также источника питания и соединяющих их кабелей. Оси оптических систем звездных датчиков (оптических головок) не должны быть параллельны друг другу ни у одной пары датчиков.
Ниже представлено более подробное описание сущности заявляемого изобретения.
Для определения вектора скорости космического аппарата, движущегося в пространстве, необходимо устройство, в котором на общем основании установлены три или более звездных датчика (или звездный датчик с тремя или более оптическими головками и общим блоком электроники). При этом оптические оси датчиков, которые задаются в конструкционной системе координат устройства единичными векторами  , N≥3 (N - число звездных датчиков или оптических головок в устройстве), должны быть не параллельны друг другу. Подобное устройство с тремя оптическими головками показано на фиг. 2.
, N≥3 (N - число звездных датчиков или оптических головок в устройстве), должны быть не параллельны друг другу. Подобное устройство с тремя оптическими головками показано на фиг. 2.
Физические углы между осями визирования датчиков ψij (i,j=1…N) в устройстве известны из геометрии конструкции устройства (его основания) и поддерживаются за счет механической жесткости конструкции. Если же механическая жесткость конструкций оказывается недостаточной, то углы могут измеряться в реальном времени устройствами для контроля геометрии.
Когда устройство неподвижно, углы между центрами полей зрения звездных датчиков (оптических головок) с точностью до погрешностей измерения будут совпадать с физическими углами между соответствующими парами осей визирования.
Если устройство движется, то изображения в поле зрения каждого из датчиков (или оптических головок) смещаются согласно формуле (1.1) и центры полей зрения, определяемые звездными датчиками, будут смещены в направлении движения КА (см. фиг. 3). Смещения будут разными - скорость движения v имеет одинаковое значение для всех датчиков устройства, но углы между осями визирования датчиков и направлением скорости различаются.
При этом углы между центрами полей зрения ψ'ij, (i,j=1…N), вычисленные по одновременно полученным показаниям звездных датчиков, будут отличаться от физически измеренных углов ψij, (i,j=1…N) между их осями визирования.
Зная «физические» направления осей визирования звездных датчиков в конструкционной системе координат  , а также значения углов ψij и ψ'ij, определяют вектор скорости движения устройства
, а также значения углов ψij и ψ'ij, определяют вектор скорости движения устройства  в конструкционной системе координат. Для этого решают систему трех линейных алгебраических уравнений, неизвестными в которой являются компоненты вектора скорости Vx, Vy, Vz в конструкционной системе координат. В правой части этой системы уравнений стоят разности углов ψij и ψ'ij, а коэффициенты перед неизвестными выражаются через компоненты векторов
в конструкционной системе координат. Для этого решают систему трех линейных алгебраических уравнений, неизвестными в которой являются компоненты вектора скорости Vx, Vy, Vz в конструкционной системе координат. В правой части этой системы уравнений стоят разности углов ψij и ψ'ij, а коэффициенты перед неизвестными выражаются через компоненты векторов  .
.
Однократное одновременное проведение измерений тремя звездными датчиками с попарно не параллельными оптическими осями позволяет определить следующие величины:
- вектор пространственной скорости прибора (и КА, на котором он установлен)  =(Vx,Vy,Vz) в инерциальной системе координат, в конструкционной системе координат устройства, а также в любой системе координат, переход к которой от конструкционной системы координат устройства известен (например, в системе координат, связанной с КА);
=(Vx,Vy,Vz) в инерциальной системе координат, в конструкционной системе координат устройства, а также в любой системе координат, переход к которой от конструкционной системы координат устройства известен (например, в системе координат, связанной с КА);
- видимое (искаженное аберрацией света) направление оптических осей звездных датчиков в инерциальной системе координат;
- истинное (исправленное за эффект аберрации света) направление оптических осей звездных датчиков в инерциальной системе координат;
- параметры ориентации устройства относительно инерциальной системы координат из которых исключено влияние эффекта аберрации света.
Таким образом, способ автономного определения пространственной скорости и устранения влияния аберрации света с помощью устройства включает следующие этапы. (Системы координат иллюстрируются фиг. 4. Нумерация частей устройства соответствует фиг. 4, 5 и 6. Ниже векторы  с различными индексами и пометками относятся к величинам, заданным в системе координат устройства (10), а вектора
с различными индексами и пометками относятся к величинам, заданным в системе координат устройства (10), а вектора  - к величинам, заданным в инерциальной системе координат.)
- к величинам, заданным в инерциальной системе координат.)
1) Исходные положения каждого из звездных датчиков (11), (12), (13), (14) относительно системы координат устройства (10) описываются известными единичными векторами направления их осей визирования  , (i=1…N), где N - число звездных датчиков в устройстве. Единая система координат связана с устройством, реализующим способ автономного определения скорости, например, с основанием этого устройства.
, (i=1…N), где N - число звездных датчиков в устройстве. Единая система координат связана с устройством, реализующим способ автономного определения скорости, например, с основанием этого устройства.
Векторы  считаются известными из конструкции звездных датчиков и устройства.
считаются известными из конструкции звездных датчиков и устройства.
Выбирают оси координат звездных датчиков таким образом, чтобы у каждого звездного датчика (или оптической головки) ось  декартовой системы координат совпадала с его оптической осью (осью визирования), т.е.
декартовой системы координат совпадала с его оптической осью (осью визирования), т.е. 
2) На основе известных векторов  вычисляют углы ψij между парами этих векторов по формуле
вычисляют углы ψij между парами этих векторов по формуле

здесь знак «×» означает скалярное произведение векторов.
3) Одновременно, в заданный момент времени t получают измерения с помощью всех звездных датчиков. Эти измерения могут быть представлены направлением на центр поля зрения (направлением оси визирования) в инерциальной системе координат, искаженным эффектом аберрации света, в виде единичного вектора  и угла ϕi разворота датчика вокруг оси визирования относительно заданного направления (например, на северный полюс мира), здесь i - номер звездного датчика. (Выбранное представление ориентации в виде направления и угла поворота вокруг него математически эквивалентно другим возможным представлениям ориентации, но более удобно для дальнейшего рассмотрения.)
и угла ϕi разворота датчика вокруг оси визирования относительно заданного направления (например, на северный полюс мира), здесь i - номер звездного датчика. (Выбранное представление ориентации в виде направления и угла поворота вокруг него математически эквивалентно другим возможным представлениям ориентации, но более удобно для дальнейшего рассмотрения.)
4) На основе измерений, проведенных звездными датчиками, вычисляют углы ψ'ij, которые являются углами между единичными векторами , полученных в результате этих измерений по формуле

здесь знак «×» означает скалярное произведение векторов.
5) Находят компоненты вектора скорости =(Vx,Vy,Vz) в системе координат устройства. Для чего решают систему линейных уравнений. Составить такую систему можно двумя способами.
=(Vx,Vy,Vz) в системе координат устройства. Для чего решают систему линейных уравнений. Составить такую систему можно двумя способами.
5.1) Из N имеющихся в устройстве звездных датчиков выбирают три и приписывают им временные номера 1, 2 и 3. Только для этих трех датчиков составляют систему трех линейных уравнений (в индексах используются временные номера):

Здесь  - координаты единичных векторов направления осей визирования в системе координат устройства (10), Dij=cosψ'ij-cosψij, Bij=1-cosψij, с - скорость света.
- координаты единичных векторов направления осей визирования в системе координат устройства (10), Dij=cosψ'ij-cosψij, Bij=1-cosψij, с - скорость света.
Если никакая пара осей визирования выбранных звездных датчиков не параллельна друг другу, то эта система уравнений является невырожденной и имеет единственное решение. Для решения полученной системы уравнений может использоваться любой известный метод решения линейных систем уравнений.
5.2) Составляют систему уравнений, включающую все пары звездных датчиков

При наличии в системе N звездных датчиков система уравнений будет содержать N(N-1)/2 уравнений, из которых N являются линейно-независимыми. При N=3 полученная система уравнений будет совпадать с приведенной в п. 5.1 выше и решается теми же методами. При N>3 получается переопределенная система уравнений, которая решается одним их следующих методов: методом наименьших квадратов, методом наибольшего правдоподобия, SVD (методом сингулярного разложения) или подобными им методами [6]. Решение переопределенной системы уравнений позволяет независимо оценить погрешность найденного решения.
6) Зная скорость  и векторы
и векторы  вычисляюм направления осей визирования звездных датчиков
вычисляюм направления осей визирования звездных датчиков  в системе координат устройства (10) для которых устранено влияния аберрации света по следующей формуле:
в системе координат устройства (10) для которых устранено влияния аберрации света по следующей формуле:

здесь с - скорость света.
7)  и
и  - одна и та же тройка единичных (но не ортогональных) векторов, представленных в инерциальной системе координат и в конструкционной системе координат, соответственно. Эти тройки можно совместить с помощью трехмерного поворота. Матрицу этого поворота Q можно найти несколькими способами, например, следующим: а) тройки единичных векторов
- одна и та же тройка единичных (но не ортогональных) векторов, представленных в инерциальной системе координат и в конструкционной системе координат, соответственно. Эти тройки можно совместить с помощью трехмерного поворота. Матрицу этого поворота Q можно найти несколькими способами, например, следующим: а) тройки единичных векторов  и
и  превращаются в правые тройки взаимно ортогональных единичных векторов
превращаются в правые тройки взаимно ортогональных единичных векторов  и
и  , таким образом, чтобы первыми векторами в тройках были, соответственно, вектора
, таким образом, чтобы первыми векторами в тройках были, соответственно, вектора  и
и  , вторые вектора в тройках лежали, соответственно, в плоскостях
, вторые вектора в тройках лежали, соответственно, в плоскостях  ,
, и
и  ,
,  , а третьи вектора были этим плоскостям ортогональны и дополняли соответствующие пары векторов до правых троек;
, а третьи вектора были этим плоскостям ортогональны и дополняли соответствующие пары векторов до правых троек;
б) из координат векторов ортогональных троек составляем ортогональные матрицы А и О:

в) искомая матрица трехмерного поворота вычисляется по следующей формуле Q=А×OT.
В матрице Q содержится полная информация об ориентации устройства относительно инерциальной системы координат. Матрица Q может быть преобразована в любое другое представление ориентации: углы Эйлера, углы Тэйта-Брайана, ось-поворот, кватернион ориентации.
8) Матрица Q позволяет вычислить вектор скорости в инерциальной системе координат
9) Зная матрицу ориентации Q можно (если это необходимо) определить направления осей визирования в инерциальной системе координат:
 - с устраненным эффектом аберрации света, или
- с устраненным эффектом аберрации света, или
 - без устранения эффекта аберрации света.
- без устранения эффекта аберрации света.
Данное изобретение позволяет: 1) определить параметры ориентации КА, скорректированные за воздействие эффекта аберрации света; 2) определить пространственную скорость КА (в инерциальной системе координат или в системе координат устройства). Изобретение позволяет определять вектор пространственной скорости устройства, т.е. как величину, так и направление скорости. Скорость движения определяют относительно той системы координат, к которой относятся координаты звезд на небесной сфере, содержащиеся в бортовых каталогах звездных датчиков. Обычно координаты небесных объектов приводят к системе координат, связанной с барицентром Солнечной системы - это наиболее близкая к инерциальной система отсчета, которая существует в Солнечной системе (в ней не учитываются только движение Солнечной системы вокруг центра Галактики и движение нашей Галактики относительно других галактик).
Достоинствами предложенного способа определения ориентации с автономной коррекцией эффекта аберрации света являются:
- простота измерений - для достижения результата необходимо провести однократное одновременное измерение ориентации тремя звездными датчиками;
- автономность измерений - устранение эффекта аберрации света проводится только на основе результатов измерений, выполненных в самом устройстве (т.е. на борту КА);
- не требуется установка на борт КА дополнительных приборов - для получения результата используются только показания звездных датчиков, которые затем корректируются;
- устройство будет работать на очень больших расстояниях от Солнца - пока координаты звезд в бортовых каталогах звездных датчиков не будут искажены параллактическими смещениями, т.о. устройство будет сохранять работоспособность на расстоянии не менее 100 парсек (300 световых лет) от Солнца;
- в качестве промежуточного результата устройство позволяет определить пространственную скорость КА (определяется как величина, так и направление скорости; скорость движения определяется относительно той системы координат, к которой относятся координаты звезд, содержащиеся в бортовых каталогах звездных датчиков - обычно это система координат, связанная с барицентром Солнечной системы).
При этом следует заметить, что исправления эффекта аберрации света всегда оказывается соответствующей точности самих звездных датчиков, поскольку определяется на основе их показаний.
Из приведенного выше описания способа определения ориентации КА с автономной коррекцией эффекта аберрации света следует, что для его осуществления достаточно наличия в устройстве трех звездных датчиков (см. п. 5). Однако, в условиях космической эксплуатации возможна засветка звездного датчика прямым солнечным излучением или его перекрытие небесным объектом (например, Землей). В этом случае выбор трех датчиков, сохранивших работоспособность, из большего числа установленных, позволяет устройству продолжать функционирование (см. п. 5.1). Избыточное число звездных датчиков позволяет устройству сохранять работоспособность при выходе одного из датчиков из строя, т.е. повышает его надежность. При этом одновременное использование всех звездных датчиков устройства, если их больше трех, позволяет повысить точность определения ориентации и пространственной скорости и, одновременно, независимо оценить ее погрешность (см. п. 5.2).
Примеры реализации.
Подтверждение возможности реализации изобретения с достижением заявленного технического результата было получено при проведении двух модельных экспериментов, в которых рассмотрены ситуации перелета КА от Земли к Марсу и КА на низкой околоземной круговой орбите на боту которых установлены ЗД средней и повышенной точности. Для моделирования использовался программный продукт MatLab.
Пример 1. Способ и устройство определения ориентации в пространстве с автономной коррекцией эффекта аберрации света.
Проведено моделирование устройства определения ориентации КА в пространстве с автономной коррекцией эффекта аберрации, установленного на борту межпланетного космического аппарата, осуществляющего перелет Земля-Марс по экономичной гомановской траектории. В устройстве используются стандартные звездные датчики со случайными погрешностями равными σ=1''.
При движении по гомановской траетории скорость межпланетного космического аппарата относительно барицентра Солнечной системы меняется за время перелета от 33 км/с до 21,5 км/с. При таких скоростях движения максимальные величины аберрации будут составлять  , максимальная величина аберрации достигается, когда угол θ между направлением скорости движения космического аппарата и осью визирования звездного датчика составляет 90°, соответственно максимальная величина аберрации будет изменяться от δθ(33 км/с)=22,6'' до δθ(21,5 км/с)=14,7'', что в 15-22 раза больше случайной погрешности звездных датчиков, которая составляет σ=1''.
, максимальная величина аберрации достигается, когда угол θ между направлением скорости движения космического аппарата и осью визирования звездного датчика составляет 90°, соответственно максимальная величина аберрации будет изменяться от δθ(33 км/с)=22,6'' до δθ(21,5 км/с)=14,7'', что в 15-22 раза больше случайной погрешности звездных датчиков, которая составляет σ=1''.
Устройство автономного определения ориентации КА в пространстве с автономной коррекцией эффекта аберрации света включает в себя четыре серийных автономных звездных датчика ориентации, установленных на механическом основании (фиг. 5), блок управления, установленный на внешней поверхности КА (фиг. 6), и соединительные кабели.
Механическое основание (5) представляет собой правильную усеченную четырехугольную пирамиду, основание которой является квадратом, а боковые грани - одинаковыми трапециями с углами 60° при большей стороне, примыкающей к основанию пирамиды.
Грани пирамиды жестко соединены между собой. Механической жесткости основания достаточно для удержания положения осей визирования звездных датчиков с точностью лучшей, чем погрешность определения ориентации датчиками.
Нижняя грань механического основания (5) имеет отверстия для крепления к КА, на боковые грани устанавливаются звездные датчики (1), (2), (3), (4). Все звездные датчики кабелями соединяются с блоком управления. (Кабели проходят внутри основания. Соединительные кабели и блок управления на фиг. 5 не показаны.) Показаниями звездных датчиков (1), (2), (3), (4) являются параметры ориентации, например, в виде пары  , где
, где  - единичный вектор видимого направления оси визирования звездного датчика, ϕi - угол разворота звездного датчика вокруг оси визирования, i - номер датчика, характеризующий разворот конструкционных систем координат датчиков (6), (7), (8) или (9) относительно инерциальной системы координат.
- единичный вектор видимого направления оси визирования звездного датчика, ϕi - угол разворота звездного датчика вокруг оси визирования, i - номер датчика, характеризующий разворот конструкционных систем координат датчиков (6), (7), (8) или (9) относительно инерциальной системы координат.
Система координат устройства (10) связана с механическим основанием (5). Начало, координат О находится в центре нижней грани основания. Ось OZ перпендикулярна нижней грани основания, она проходит через точку начала координат О и вершину пирамиды. Ось ОХ лежит в плоскости нижней грани основания, она проходит через точку О и середину боковой грани на которой установлен датчик №1, причем последняя точка лежит на положительной части оси ОХ. Ось OY перпендикулярна осям ОХ и OZ, а ее направление выбрано так, что оси OX, OY и OZ образуют правую тройку (см. фиг. 5).
С датчиками также связаны системы координат (6), (7), (8), (9). Начала этих систем координат Oi (i=1…4, i=1 соответствует первому звездному датчику, i=2 - второму, i=3 - третьему, i=4 - четвертому) расположены в центрах (точках пересечения диагоналей) соответствующих боковых граней механического основания (5). Оси OiXi направлены по внешней нормали к граням основания и совпадают с осями визирования оптических систем датчиков. OiYi лежат в плоскости боковых граней, они проходят через точки Oi и центр основания трапеции грани. Оси OiZi перпендикулярны осям OiXi и OiYi, а их направления выбраны так, чтобы оси OiXi, OiYi и OiZi образовывали правую тройку векторов.
При такой геометрии механического основания (5) и указанном выборе систем координат единичные вектора  имеют вид:
имеют вид:
углы между осями визирования пар звездных датчиков составляют
ψ12=ψ23=ψ34=ψ14≈70,5°, ψ13=ψ24≈109,5°
а, матрицы перехода Ri от системы координат i-го датчика к системе координат механического основания имеют вид:

В момент времени t одновременно проводятся измерения всеми звездными датчиками, результат проведенных измерений имеет вид  в инерциальной системе координат.
в инерциальной системе координат.
По показаниям звездных датчиков вычисляем измеренные (наблюдаемые) углы между центрами полей зрения звездных датчиков

здесь знак «×» означает скалярное произведение векторов.
Из четырех звездных датчиков выбираем три незасвеченных Солнцем, например, 1-й, 2-й и 3-й, и составляем систему уравнений:

Здесь VX, VY, VZ - компоненты вектора скорости в системе координат устройства (10), а с - скорость света. Система уравнений не вырождена, решаем ее и получаем вектор пространственной скорости 
Зная вектор пространственной скорости  и направления осей визирования
и направления осей визирования  (все эти вектора заданы в системе координат устройства (10)) находим углы между ними
(все эти вектора заданы в системе координат устройства (10)) находим углы между ними  По формуле (1.1) находим поправки для этих углов
По формуле (1.1) находим поправки для этих углов  (а для векторов
(а для векторов  - по формуле (1.2)). Вычитая поправки из соответствующих углов θi (или векторов
- по формуле (1.2)). Вычитая поправки из соответствующих углов θi (или векторов  ), устраняем эффект аберрации света.
), устраняем эффект аберрации света.
По показаниям одного или нескольких звездных датчиков можно определить матрицу Q перехода от системы координат устройства к инерциальной системе координат. Эта матрица позволяет вычислить вектор скорости в инерциальной системе координат

В зависимости от ориентации осей звездных датчиков относительно вектора скорости движения космического аппарата (которая может быть произвольной) разности углов δψ12=ψ'12-ψ12, δψ13=ψ'13-ψ13, δψ23=ψ'23-ψ23 будут меняться в пределах: 0''≤δψ12, δψ13, δψ23≤22,6'', причем нулевое или близкое к нулю значение может принимать только одна из разностей углов, две других при этом должны превышать 7''.
Погрешность определения скорости согласно системе уравнений (2.1) в среднем по всем возможным ориентациям космического аппарата относительно направления его движения составляет σV=с⋅σ≈1,5 км/с, а погрешность определения аберрации σab≈1,4''. Таким образом, остаточная погрешность исправленной за влияние аберрации света сравнима с точностью используемых в устройстве звездных датчиков и составляет 6%-10% от максимальной величины аберрации (в зависимости от орбитальной скорости космического аппарата), т.е. точность определения ориентации устройством повышается в 10-16 раз.
Таким образом, заявляемое изобретение обеспечивает достижения заявленного технического результата:
1) определена ориентация КА относительно инерциальной системы координат;
2) найдены поправки δθi, необходимые для коррекции эффекта аберрации света;
3) точность определения ориентации возрастает в 10-16 раз;
4) определен вектор пространственной скорости  (в системе координат устройства или
(в системе координат устройства или  (с инерциальной системе координат).
(с инерциальной системе координат).
5) погрешность определения скорости σV=1,5 км/с.
Пример 2. Способ и устройство определения ориентации в пространстве с автономной коррекцией эффекта аберрации света.
Проведено моделирование устройства определения ориентации КА в пространстве с автономной коррекцией эффекта аберрации, установленного на борту КА на экваториальной круговой околоземной орбите с высотой h=400 км. В устройстве используются звездные датчики повышенной точности со случайными погрешностями равными σ=0,3''
Скорость движения космического аппарата вокруг Земли по круговой орбите с высотой 400 км составляет 7,9 км/с, соответственно, скорость космического аппарата относительно барицентра Солнечной системы меняется от 22 км/с до 38 км/с в зависимости от положения аппарата на околоземной орбите. При таких скоростях движения максимальные величины аберрации будут составлять  , максимальная величина аберрации достигается, когда угол θ между направлением скорости движения космического аппарата и осью визирования звездного датчика составляет 90°, соответственно максимальная величина аберрации будет изменяться от δθ(22 км/с)=15'' до δθ(38 км/с)=26'', что в 50-87 раз больше случайной погрешности звездных датчиков, которая составляет σ=0,3''.
, максимальная величина аберрации достигается, когда угол θ между направлением скорости движения космического аппарата и осью визирования звездного датчика составляет 90°, соответственно максимальная величина аберрации будет изменяться от δθ(22 км/с)=15'' до δθ(38 км/с)=26'', что в 50-87 раз больше случайной погрешности звездных датчиков, которая составляет σ=0,3''.
Устройство автономного определения скорости КА в пространстве включает в себя соединительные кабели? три звездных датчика ориентации (1), (2), (3) повышенной точности, установленные на механическом основании (5) (см. фиг. 7) и блок управления (фиг. 8), установленный внутри наполненного воздухом герметичного отсека КА. Механическое основание (5) для трех ЗД представляет собой правильную треугольную пирамиду, основание которой является правильным треугольником, а боковые грани - одинаковыми равнобедренными прямоугольными треугольниками с углами 90° при вершине пирамиды (таким образом, боковые грани этой пирамиды взаимно перпендикулярны).
Нижняя грань механического основания (5) крепится непосредственно к КА, три боковые грани крепятся к нижней. Звездные датчики (1), (2), (3) кабелями (11) соединяются с блоком управления. Кабели проходят внутри основания. Показаниями звездных датчиков (1), (2) и (3) являются параметры ориентации, например, в виде пары  , где
, где  - единичный вектор видимого направления оси визирования звездного датчика в инерциальной системе координат, ϕi - угол разворота звездного датчика вокруг оси визирования, i - номер датчика. Эти параметры характеризуют разворот конструкционной системы координат каждого из датчиков (6), (7) или (8) относительно инерциальной системы координат.
- единичный вектор видимого направления оси визирования звездного датчика в инерциальной системе координат, ϕi - угол разворота звездного датчика вокруг оси визирования, i - номер датчика. Эти параметры характеризуют разворот конструкционной системы координат каждого из датчиков (6), (7) или (8) относительно инерциальной системы координат.
Система координат устройства (10) связана с механическим основанием (5). Начало координат О находится в центре нижней грани основания. Ось OZ перпендикулярна нижней грани основания, она проходит через точку О и вершину пирамиды. Ось ОХ лежит в плоскости нижней грани основания, она проходит через точку О и середину боковой грани на которой установлен датчик №3, причем последняя точка лежит на положительной части оси ОХ. Ось OY перпендикулярна осям ОХ и OZ, а ее направление выбрано так, что оси OX, OY и OZ образуют правую тройку (см. фиг. 7).
Со звездными датчиками (1), (2), (3) также связаны системы координат (6), (7) и (8), соответственно. Начала этих систем координат Oi (i=1…3 - номера звездных датчиков) расположены в центрах (точках пересечения медиан) соответствующих боковых граней механического основания. Оси OiXi направлены по внешней нормали к граням основания и совпадают с осями визирования оптических систем датчиков. OiYi лежат в плоскости боковых граней, они проходят через точки Oi и центр гипотенузы соответствующей грани. Оси OiZi перпендикулярны осям OiXi и OiYi, а их направления выбраны так, чтобы оси OiXi, OiYi и OiZi образовывали правую тройку.
При такой геометрии механического основания (5) и указанном выборе систем координат единичные вектора  имеют вид:
имеют вид:
а углы между осями визирования пар звездных датчиков составляют
ψ12=ψ23=ψ13=90°.
В момент времени t одновременно проводятся измерения всеми звездными датчиками, результат проведенных измерений имеет вид  в инерциальной системе координат.
в инерциальной системе координат.
По показаниям звездных датчиков вычисляем измеренные (наблюдаемые) углы между центрами полей зрения звездных датчиков

здесь знак «×» означает скалярное произведение векторов.
Составляем систему уравнений для определения скорости. Система имеет вид:

Здесь VX, VY, VZ - компоненты вектора скорости в системе координат устройства (10), а с - скорость света. Система уравнений не вырождена. Решаем ее и получаем вектор пространственной скорости  в системе координат устройства (10).
в системе координат устройства (10).
Зная вектор пространственной скорости и направления осей визирования  (все эти вектора заданы в системе координат устройства (10)) находим углы между ними
(все эти вектора заданы в системе координат устройства (10)) находим углы между ними  По формуле (1.1) находим поправки для этих углов
По формуле (1.1) находим поправки для этих углов  (а для векторов
(а для векторов  - по формуле (1.2)). Вычитая поправки из соответствующих углов θi (или векторов
- по формуле (1.2)). Вычитая поправки из соответствующих углов θi (или векторов  ), устраняем эффект аберрации света.
), устраняем эффект аберрации света.
По показаниям одного или нескольких звездных датчиков можно определить матрицу Q перехода от системы координат устройства к инерциальной системе координат. Эта матрица позволяет вычислить вектор скорости в инерциальной системе координат

В зависимости от ориентации осей звездных датчиков относительно вектора скорости движения космического аппарата (которая может быть произвольной) разности углов δψ12=ψ'12-ψ12, δψ13=ψ'13-ψ13, δψ23=ψ'23-ψ23 будут меняться в пределах: 0''≤δψ12, δψ13, δψ23≤26'', причем нулевое или близкое к нулю значение может принимать только одна из разностей углов, две других при этом должны превышать 8''.
Погрешность определения скорости согласно системе уравнений (2.2) в среднем по всем возможным ориентациям космического аппарата относительно направления его движения составляет σV=с⋅σ≈0,45 км/с, а погрешность определения аберрации σab≈0,42''. Таким образом, остаточная погрешность исправленной за влияние аберрации света сравнима с точностью используемых в устройстве звездных датчиков и составляет 1,6%-2,8% от максимальной величины аберрации (в зависимости от орбитальной скорости космического аппарата), т.е. точность определения ориентации устройством повышается в 30-60 раз.
Технический результат достигнут:
1) определена ориентация КА относительно инерциальной системы координат;
2) найдены поправки δθi, необходимые для коррекции эффекта аберрации света;
3) точность определения ориентации возрастает в 30-60 раз;
4) определен вектор пространственной скорости  (в системе координат устройства или
(в системе координат устройства или  (с инерциальной системе координат).
(с инерциальной системе координат).
5) погрешность определения скорости составляет σV=0,45 км/с.
Библиография.
1. В.Е. Жаров Сферическая астрономия // Фрязино: Век-2. 2006. 480 с.
2. Дятлов С.А., Бессонов Р.В. Обзор звездных датчиков ориентации космических аппаратов // Механика, управление и информатика, 2009. №1. С. 11-31.
3. Емельянов Н.В. Практическая небесная механика // М.: Физический факультет МГУ, 2018. ISBN 978-5-9600218-1-7. 270 с.
4. Иванов Н.М., Лысенко Л.Н. Баллистика и навигация космических аппаратов // М.: URSS, 2016 / 3-е издание. 680 с. ISBN 978-5-7038-4340-6.
5. Серапинас Б.Б. Глобальные системы позиционирования // М.: ИКФ «Каталог», 2002. 106 с.
6. Дж. Форсайт, М. Малькольм, К. Моулер Машинные методы математических вычислений // М.: Мир. 1980. 280 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2696399C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
| Способ управления космическим аппаратом дистанционного зондирования Земли | 2019 |
|
RU2722598C1 |
| Способ астрономической коррекции навигационных параметров летательного аппарата | 2021 |
|
RU2767449C1 |
| Устройство определения ориентации объекта по звездам с расщепленным полем зрения | 2022 |
|
RU2796578C1 |
| Способ спутниковой гравитационной градиентометрии | 2020 |
|
RU2745364C1 |
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ | 2021 |
|
RU2776096C1 |
| АВТОНОМНАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА "ГАСАД" | 1993 |
|
RU2033949C1 |
| АВТОНОМНАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА ГАСАД-2А | 2005 |
|
RU2304549C2 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |




Группа изобретений относится к космической технике, а именно к способу и системе определения ориентации космического аппарата (КА) с автономной коррекцией эффекта аберрации света с помощью наблюдения звезд. Система включает не менее трех звездных датчиков (ЗД), установленных на общем основании таким образом, что оптические оси датчиков попарно не параллельны друг другу с заданными углами между их оптическими осями, определяемыми расположением ЗД на основании, блок обработки данных, полученных от звездных датчиков. Каждый из ЗД в блоке выполнен с возможностью определения направления оси визирования ЗД в инерциальной системе координат посредством определения координат центров полей зрения датчиков и угла разворота поля зрения вокруг его центра с получением предварительных параметров ориентации КА. Способ включает одновременное измерение координат центров полей зрения датчиков в процессе движения КА, определение углов между центрами полей зрения не менее трех пар датчиков, определение величины отклонений измеренных углов от заданных, определение вектора пространственной скорости КА, после чего определяют эффект аберрации света и учитывают его при определении пространственной ориентации КА. 2 н. и 6 з.п. ф-лы, 8 ил.
1. Система для определения пространственной ориентации КА с автономной коррекцией эффекта аберрации света, вектора пространственной скорости КА, включающая установленные на борту КА блок звездных датчиков - не менее трех, установленных на общем основании таким образом, что оптические оси датчиков попарно не параллельны друг другу с заданными углами между их оптическими осями, определяемыми расположением звездных датчиков на основании, и блок обработки данных, полученных от звездных датчиков, снабженные блоками питания, где
блок звездных датчиков (ЗД) выполнен с возможностью одновременного проведения измерений входящими в него звездными датчиками, при этом каждый из звездных датчиков в блоке выполнен с возможностью определения направления оптической оси ЗД в инерциальной системе координат посредством определения координат центров полей зрения датчиков и угла разворота поля зрения вокруг его центра с получением предварительных параметров ориентации КА;
блок обработки выполнен с возможностью определения по одновременно измеренным предварительным параметрам ориентации КА углов между оптическими осями ЗД в инерциальной системе координат, по меньшей мере, трех пар ЗД, сравнения полученных углов с заданными (известными) значениями углов между оптическими осями ЗД с последующим определением вектора пространственной скорости КА в инерциальной системе координат, определением эффекта аберрации света и его учетом при определении пространственной ориентации КА.
2. Система по п. 1, характеризующаяся тем, что при использовании трех звездных датчиков определение вектора пространственной скорости КА в инерциальной системе координат в блоке обработки реализовано посредством выполнения следующего условия:
где Vx, Vy, Vz - компоненты пространственной скорости в системе координат устройства, (x1,y1,z1) - координаты единичного вектора, направленного вдоль оси визирования 1-го звездного датчика (оптической головки) в системе координат устройства, (x2,y2,z2) - то же для 2-го звездного датчика, (x3,y3,z3) - то же для 3-го звездного датчика, В12=1-cosψ12, a ψ12 - угол между осями визирования 1-го и 2-го звездных датчиков в системе координат устройства, B13=1-cosψ13, a ψ13 - угол между осями визирования 1-го и 3-го звездных датчиков в системе координат устройства, В23=1-cosψ23, а ψ23 - угол между осями визирования 2-го и 3-го звездных датчиков в системе координат устройства, D12=cosψ'12-cosψ12, а ψ'12 - угол между видимыми (определяемыми) направлениями осей визирования 1-го и 2-го звездных датчиков, D13=cosψ'13-cosψ13, а ψ'13 - угол между видимыми (определяемыми) направлениями осей визирования 1-го и 3-го звездных датчиков, D23=cosψ'23-cosψ23, a ψ'23 - угол между видимыми (определяемыми) направлениями осей визирования 2-го и 3-го звездных датчиков, с - скорость света.
3. Система по п. 1, характеризующаяся тем, что при использовании более трех звездных датчиков ориентации определение вектора пространственной скорости КА в инерциальной системе координат в блоке обработки реализовано посредством выполнения следующего условия:

где Vx, Vy, Vz - компоненты пространственной скорости в системе координат устройства, (xi,yi,zi) - координаты единичного вектора, направленного вдоль оси визирования i-го звездного датчика (оптической головки) в системе координат устройства, Bij=1-cosψij, а ψij - угол между осями визирования i-го и j-го звездных датчиков в системе координат устройства, Dij=cosψ'ij-cosψij, а ψ'ij - угол между видимыми (определяемыми) направлениями осей визирования i-го и j-го звездных датчиков, с - скорость света.
4. Система по п. 1, характеризующаяся тем, что корректировку предварительных параметров ориентации КА осуществляют по формуле:

где  - видимое направление оси визирования i-го звездного датчика, искаженное эффектом аберрации света,
- видимое направление оси визирования i-го звездного датчика, искаженное эффектом аберрации света,  - истинное направление оси визирования этого датчика,
- истинное направление оси визирования этого датчика,  - вектор пространственной скорости КА, с - скорость света, знаком «×» обозначено векторное произведение векторов.
- вектор пространственной скорости КА, с - скорость света, знаком «×» обозначено векторное произведение векторов.
5. Способ определения пространственной ориентации КА с помощью системы по п. 1, включающий одновременное измерение координат центров полей зрения датчиков в процессе движения КА, по которым определяют углы между центрами полей зрения не менее трех пар датчиков, после чего определяют величины отклонений измеренных углов от заданных, по которым определяют вектор пространственной скорости КА, после чего определяют эффект аберрации света и учитывают его при определении пространственной ориентации КА.
6. Способ по п. 5, характеризующийся тем, что при использовании трех звездных датчиков вектор пространственной скорости КА в инерциальной системе координат определяют из системы уравнений:

где Vx, Vy, Vz - компоненты пространственной скорости в системе координат устройства, (x1,y1,z1) - координаты единичного вектора, направленного вдоль оси визирования 1-го звездного датчика (оптической головки) в системе координат устройства, (x2,y2,z2) - то же для 2-го звездного датчика, (x3,y3,z3) - то же для 3-го звездного датчика, В12=1-cosψ12, a ψ12 - угол между осями визирования 1-го и 2-го звездных датчиков в системе координат устройства, В13=1-cosψ13, а ψ13 - угол между осями визирования 1-го и 3-го звездных датчиков в системе координат устройства, В23=1-cosψ23, a ψ23 - угол между осями визирования 2-го и 3-го звездных датчиков в системе координат устройства, D12=cosψ'12-cosψ12, а ψ'12 - угол между видимыми (определяемыми) направлениями осей визирования 1-го и 2-го звездных датчиков, D13=cosψ'13-cosψl3, a ψ'13 - угол между видимыми (определяемыми) направлениями осей визирования 1-го и 3-го звездных датчиков, D23=cosψ'23-cosψ23, а ψ'23 - угол между видимыми (определяемыми) направлениями осей визирования 2-го и 3-го звездных датчиков, с - скорость света.
7. Способ по п. 5, характеризующийся тем, что при использовании более трех звездных датчиков ориентации вектор пространственной скорости КА определяют из системы уравнений:

где Vx, Vy, Vz - компоненты пространственной скорости в системе координат устройства, (xi,yi,zi) - координаты единичного вектора, направленного вдоль оси визирования i-го звездного датчика (оптической головки) в системе координат устройства, Bij=1-cosψij, а ψij - угол между осями визирования i-го и j-го звездных датчиков в системе координат устройства, Dij=cosψ'ij-cosψij, а ψ'ij - угол между видимыми (определяемыми) направлениями осей визирования i-го и j-го звездных датчиков, с - скорость света.
8. Способ по п. 5, характеризующийся тем, что учет эффекта аберрации при определении пространственной ориентации КА производят по формуле:

где  - видимое направление оси визирования i-го звездного датчика, искаженное эффектом аберрации света,
- видимое направление оси визирования i-го звездного датчика, искаженное эффектом аберрации света,  - истинное направление оси визирования этого датчика,
- истинное направление оси визирования этого датчика,  - вектор пространственной скорости КА, с - скорость света, знаком «×» обозначено векторное произведение векторов.
- вектор пространственной скорости КА, с - скорость света, знаком «×» обозначено векторное произведение векторов.
| US 5109346 A1, 28.04.1992 | |||
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ ОРБИТЫ И ОРИЕНТАЦИИ КОРПУСА КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ ПРИ ОТСУТСТВИИ АПРИОРНОЙ ИНФОРМАЦИИ | 2013 |
|
RU2542599C2 |
| US 6622970 B2, 23.09.2003 | |||
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ КОСМИЧЕСКИХ ИЛИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2015 |
|
RU2620854C1 |

