Область техники
Изобретение относится к области космонавтики, а именно к средствам управления, ориентации и навигации космических летательных аппаратов. Наиболее эффективно изобретение может быть использовано в системах управления малых космических аппаратов.
Предшествующий уровень техники
Задача определения ориентации и навигации космических аппаратов при выполнении различных миссий была и остается одной из самых сложных. Актуальность решения задач ориентации и навигации в автономном режиме при выполнении миссий связанных с межпланетными переходами и миссий по исследованию дальнего космоса хорошо известна. В последние годы все большие темпы набирают исследования по обоснованию возможности создания на низкой околоземной орбите группировок, состоящих из 200 и более малых космических аппаратов, которые должны функционировать автономно, в том числе решать задачу поддержания своего орбитального положения в автономном режиме. Наиболее известным является проект британской фирмы OneWeb. В РФ аналогичные исследования проводятся в рамках проекта по созданию глобальной многоспутниковой инфокоммуникационной системы «Сфера», развертывание которой планируется на 2030 г. Учитывая сложившуюся тенденцию задача создания средств для решения задач ориентации и навигации малых космических аппаратов в автономном режиме приобретает актуальность и для миссий, выполняемых на низких околоземных орбитах.
Одними из основных методов решения задачи ориентации и автономной навигации космического аппарата в околоземном космическом пространстве являются методы инерциальной навигации, основанные на измерении составляющих кажущегося линейного ускорения движения космического аппарата акселерометрами и нахождения по этим измерениям линейной скорости его движения. Также инерциальные приборы обеспечивают измерение угловой скорости с применением гироскопических измерителей. В общем виде решение навигационной задачи с применением методов инерциальной навигации можно записать в виде:

где r - радиус вектор летательного аппарата в инерциальном пространстве;
g - вектор гравитационного ускорения в месте положения точки;
p - первичная информация, измеряемая датчиками кажущегося линейного ускорения;
Навигационное решение получается двукратным интегрированием выражения 1.
где  и r0 - это начальные значения вектора - априорная информация.
и r0 - это начальные значения вектора - априорная информация.
Известна астроинерциальная навигационная система (патент RU 141 801 U1, дата публикации 10.06.2014) в которой реализуется способ вычисления текущих координат, скоростей и ориентации летательного аппарата. Коррекция «дрейфа нуля» и «ухода осей» осуществляется по показаниям астровизирующего устройства, входящего в состав астроинерциальной навигационной системы.
Накопление ошибок измерений, которое присуще любой, даже самой точной инерциальной системе, что обусловлено принципом ее работы, связанной с необходимостью постоянного интегрирования линейных ускорений и скоростей движения летательного аппарата (см. выражение 2), является основными недостатками методов инерциальной навигации. Другим существенным недостатком инерциальных систем является то, что для решения навигационной задачи требуется наличие априорной информации - константы  и r0 в выражении 2.
и r0 в выражении 2.
Наряду с инерциальными методами широкое распространение получили методы астрономической навигации. Это класс методов также позволяет обеспечить решение задачи определения ориентации и навигации летательного аппарата в автономном режиме. В качестве первичных навигационных параметров при реализации астрономических методов используются направления на астрономические объекты: звезды, планеты и т.д. Известным навигационным параметром, который измеряется оптическими средствами для вычисления параметров орбиты космического аппарата - это измерение углового расстояния между известной (опознанной) звездой и видимым горизонтом планеты. Известно устройство (патент RU 2 650 730 С1, дата публикации 17.04.2018) которое обеспечивает определение ориентации и решение задачи навигации космического аппарата в автономном режиме с использованием этого первичного навигационного параметра. Оптическая схема известного устройства позволяет одновременно наблюдать два пересекающихся участка звездного неба, одного со звездами, другого с горизонтом планеты (Земли, Луны). Далее изображение поступает в вычислительный блок, где обеспечивается вычисление угловых расстояний между выбранными звездами и горизонтом планеты.
Также известен способ определения ориентации и автономной навигации КА (патент на изобретение RU 2 318 188 C1, дата публикации 17.07.2006) для реализации которого средствами оптико-электронного прибора измеряется зенитное расстояние до двух звезд. Зенитное расстояние используется для решения задачи определения ориентации, а для решения задачи навигации в автономном режиме, дополнительно используют пространственное положение радиуса-вектора опорной (априори полагаемой) орбиты и другие элементы этой орбиты, которые определяют компьютерным расчетом.
Наиболее близким по технической сущности к заявляемому изобретению следует считать способ по патенту RU 2 318 188, который принят за прототип. Общим признаком прототипа и заявляемого способа является то, что для их реализации применяется оптико-электронный прибор, жестко закрепленный к корпусу космического аппарата. Оптико-электронный прибор применяется для визирования информативного участка звездного неба и получения направления на звезды. Общим также является то, что для реализации способа прототипа и заявляемого способа, кроме направления на бесконечно удаленную звезду, требуется иметь второе направление, связанное именно с орбитальным движением космического аппарата. При реализации известного способа, в отличие от патентуемого, для получения второго направления, проводится компьютерный расчет орта радиуса-вектора опорной (априори полагаемой) орбиты. Этот орт выступает в качестве линии, связанной с орбитальным движением космического аппарата, и позволяет рассчитать зенитное расстояние звезды. Для решения задачи навигации известного способа также необходимо грубое отслеживание системой стабилизации космического аппарата направление на центр планеты.
Недостатком прототипа является то, что для решения навигационной задачи требуется наличие информации об априорной орбите функционирования космического аппарата, которое рассчитывается посредством компьютерного моделирования. Погрешность решения навигационной задачи зависят от погрешностей компьютерного моделирования, которое, в свою очередь, определяется точностью знания начального вектора состояния космического аппарата. В общем случае параметры начального вектора состояния космического аппарата известны с низкой точностью, таким образом, потребуется длительный промежуток времени для уточнения априорной орбиты по измерениям первичной навигационной информации.
Раскрытие изобретения
Технический результат от использования изобретения заключается в повышении точности и оперативности решения навигационной задачи космического аппарата за счет того, что для решения навигационной задачи не требуется наличия априорной информации об орбите функционирования космического аппарата. Для решения задач ориентации и навигации используется только первичная информация, получаемая средствами оптико-электронного прибора.
Указанный технический результат достигается способом решения задачи навигации и ориентации космического аппарата, включающим измерение приборных координат и яркости звезд, попавших в поле зрения жестко закрепленного на корпусе космического аппарата оптико-электронного прибора, звезды распознают и используют для определения ориентации корпуса космического аппарата относительно текущей орбитальной системы координат, в котором, в соответствии с изобретением, для решения навигационной задачи используют орт радиуса-вектора направления на специализированный астрономический объект, измеряемый средствами того же оптико-электронного прибора, который используется для распознавания звезд при решении задачи ориентации корпуса космического аппарата, при этом светочувствительная матрица оптико-электронного прибора обеспечивает визирование специализированного астрономического объекта и звезд с единым временем экспонирования, что позволяет обеспечить привязку радиуса-вектора направления на специализированный астрономический объект к инерциальному базису с точностью, достаточной для решения навигационной задачи.
Создание способа с указанным выше техническим результатом стало возможно благодаря разработке нового оптико-электронного прибора, программно-аппаратные средства которого обеспечивает получение изображений с высоким динамическим диапазоном достаточным для визирования информативных участков небесной сферы, содержащих изображения звезд и Луны в одном кадре, полученном с единым временем экспонирования яркой Луны и тусклых звезд. В состав нового оптико-электронного прибора входит светочувствительная матрица, которая обеспечивает получение двух изображений с одним временем экспонирования, но с разными коэффициентами усиления, из которых один коэффициент усиления оптимизирован для получения качественного изображения яркой Луны, другой коэффициент усиления оптимизирован для получения качественного изображения самого тусклой звезды в пределах визируемого изображения. Окончательное изображение с высоким динамическим диапазоном, достаточным для выделения объектов и вычисления вектора направления на них составляется из двух этих изображений. Это позволяет обеспечить привязку изображения Луны к изображению звезд и вычислить вектор направления на Луну в инерциальной системе координат с высокой точностью. Именно вычисление орта вектора направления на Луну в инерциальной системе координаты с высокой точностью позволяет реализовать предлагаемый способ и получить приемлемую точность и оперативность решения навигационной задачи при выполнении целевых задач большинства известных космических миссий.
Краткое описание чертежа
На чертеже представлено графическое представление решения навигационной задачи. Принятые здесь обозначения точек и векторов используются далее при описании соотношений, по которым рассчитываются параметры орбиты.
X, Y, Z - оси геоцентрической инерциальной системы координат (инерциальный базис);
 - орт радиуса-вектора направления на Луну измеренный относительно инерциального базиса средствами оптико-электронного прибора;
- орт радиуса-вектора направления на Луну измеренный относительно инерциального базиса средствами оптико-электронного прибора;
Тнач…Ткон - начальная и конечная эпоха, ограничивающие период, в который проведены измерения орта радиуса-вектора Луны;
 - искомый вектор положения космического аппарата в инерциальном базисе;
- искомый вектор положения космического аппарата в инерциальном базисе;
 - известный радиус-вектор Луны, который рассчитывается по известной модели движения Луны.
- известный радиус-вектор Луны, который рассчитывается по известной модели движения Луны.
На чертеже в центре изображения располагается Земля поз. 1. Полюс инерциальной геоцентрической системы координат X, Y, Z совпадает с центром Земли. Также на чертеже схематично указаны: орбита КА поз. 2, орбита Луны поз. 3, положение космического аппарата и Луны поз. 4 и поз. 5 соответственно, а также приводятся положение основных векторов, которые используются при решении навигационной задачи космического аппарата.
Осуществление изобретения
Способ включает измерение приборных координат и яркости звезд, попавших в поле зрения жестко закрепленного на корпусе космического аппарата оптико-электронного прибора звезды распознают и используют для определения ориентации корпуса космического аппарата относительно текущей орбитальной системы координат. Для решения навигационной задачи дополнительно используют орт радиуса-вектора направления на специализированный астрономический объект, который связан с орбитальным движением космического аппарата. При этом орт радиуса-вектора измеряется средствами того же оптико-электронного прибора, который используется для распознавания звезд при решении задачи ориентации корпуса космического аппарата. Светочувствительная матрица оптико-электронного прибора обеспечивает визирование специализированного астрономического объекта и звезд с единым временем экспонирования, что позволяет обеспечить привязку радиуса-вектора направления на специализированный астрономический объект к инерциальному базису с точностью, достаточной для решения навигационной задачи.
В общем виде решение навигационной задачи, согласно изобретению, описывается зависимостью (1).

Неизвестным в выражении 3 является расстояние между Луной и космическим аппаратом ρ. Для вычисления расстояния ρ при реализации способа автономной навигации в соответствии с изобретением не требуется наличия информации об априорной орбите космического аппарата. Определение этого параметра реализуется в три этапа.
На первом этапе проводится приблизительная оценка расстояния исходя из предположения, что космический аппарат движется по кеплеровской невозмущенной орбите. Для решения этой задачи можно воспользоваться моделью, предложенной Лапласом для определения гелиоцентрических расстояний до планеты по серии измерений восхождения и склонения планеты, описанной в справочнике (Душобин Г.Н. Справочное руководство по небесной механике и астродинамике. - М.: Наука, - главная редакция физико-математической литературы, - 1976 г. - 864 с). Для этого модель модифицируется в части переноса начала отсчета инерциального базиса в центр Земли. Кроме того, вместо прямого восхождения и склонения планеты поляризуются измерения вектора направления на Луну.
На втором этапе проводится фильтрация полученных на первом этапе решений, например, с применением сглаживающего «интерполяционного» фильтра третьей степени, который дает достаточно хорошие результаты сглаживания для дуги круговой орбиты. На этом этапе множество ρi, где i - порядковый номер решения, полученного в момент времени ti ∈ (Тнач…Ткон), полученных на первом этапе, используется для вычисления коэффициентов интерполяционного фильтра. После фильтрации полученное множество значений ( ), используются для решения навигационной задачи в виде шестимерного вектора состояния космического аппарата.
), используются для решения навигационной задачи в виде шестимерного вектора состояния космического аппарата.
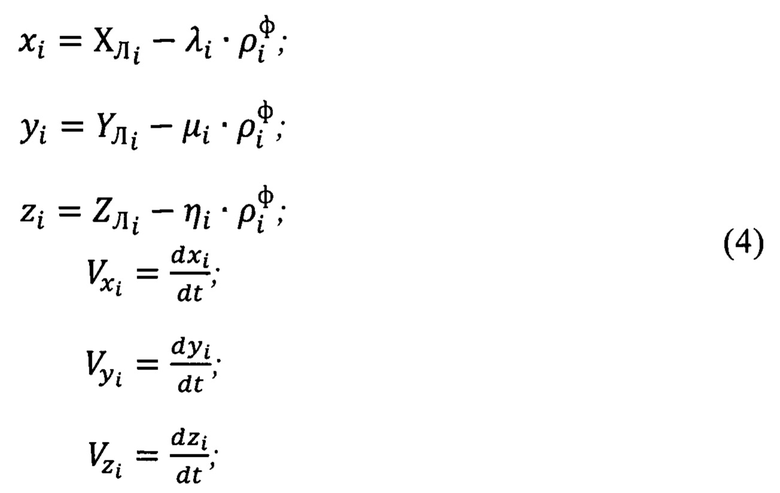
где λ, μ, η - компоненты орта радиуса-вектора направления на Луну измеренный относительно инерциального базиса средствами оптико-электронного прибора;
х, у, z - координаты искомого радиуса-вектора положения космического аппарата;
XЛ, YЛ, ZЛ - радиус-вектор положения Луны;
На третьем этапе полученные решения, в виде шестимерного вектора, описываемого выражением 4, поступают на вход модели, описывающей возмущенное движение космического аппарата. Для каждого i-того вектора состояния, полученного на выходе второго этапа, вычисляется прогноз положения космического аппарата, а также расстояние космический аппарат-Луна. Исходя из такой постановки, на выходе третьего этапа реализации методики имеем массив [N, i] решений навигационной задачи, включая расстояний космический аппарат-Луна ( ).
).
Для каждого решения вычисляется функционал в соответствии с выражением 5:

В качестве решения навигационной задачи выбирается то решение, при котором  достигает минимального значения.
достигает минимального значения.
Наиболее эффективно способ может быть использован для создания автономных астронавигационных систем, повышения оперативности решения задач навигации космических аппаратов, без знания априорной информации об орбите функционирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ НА ОСНОВЕ ВИРТУАЛЬНЫХ ИЗМЕРЕНИЙ ЗЕНИТНЫХ РАССТОЯНИЙ ЗВЕЗД | 2010 |
|
RU2454631C1 |
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ | 2006 |
|
RU2318188C1 |
| СПОСОБ АВТОНОМНОГО ОЦЕНИВАНИЯ ИЗМЕНЕНИЙ ОРБИТЫ ВИЗИРУЕМОГО КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2624408C2 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2003 |
|
RU2247945C1 |
| Способ межзвездной навигации космического корабля | 2018 |
|
RU2697866C1 |
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ ОРБИТЫ И ОРИЕНТАЦИИ КОРПУСА КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ ПРИ ОТСУТСТВИИ АПРИОРНОЙ ИНФОРМАЦИИ | 2013 |
|
RU2542599C2 |
| СПОСОБ СОЗДАНИЯ КОСМИЧЕСКОЙ ГЕОДЕЗИЧЕСКОЙ СЕТИ | 2006 |
|
RU2337372C2 |
| СПОСОБ НАЗЕМНОЙ ИМИТАЦИИ ПОЛЕТА КОСМИЧЕСКИХ АППАРАТОВ В КОСМОСЕ | 2012 |
|
RU2527632C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2729339C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ АТМОСФЕРНОЙ РЕФРАКЦИИ В УСЛОВИЯХ КОСМИЧЕСКОГО ПОЛЕТА | 2014 |
|
RU2566379C1 |

Изобретение относится к бортовой системе управления космическим аппаратом (КА) для решения задач ориентации и навигации в автономном режиме. Сущность изобретения заключается в измерении приборных координат и яркости звезд, попавших в поле зрения жестко закрепленного на корпусе КА оптико-электронного прибора. Звёзды распознают и используют для определения ориентации корпуса космического аппарата относительно текущей орбитальной системы координат. Для решения навигационной задачи используют орт радиуса-вектора направления на Луну, связанный с орбитальным движением КА и измеряемый средствами того же оптико-электронного прибора, который используется для распознавания звезд при решении задачи ориентации корпуса КА. Технический результат заключается в повышении точности и оперативности решения навигационной задачи КА за счет того, что для решения навигационной задачи не требуется наличия априорной информации об орбите функционирования КА. 1 з.п. ф-лы, 1 ил.
1. Способ автономной навигации и ориентации космических аппаратов, включающий измерение приборных координат и яркости звезд, попавших в поле зрения жестко закрепленного на корпусе космического аппарата оптико-электронного прибора, звезды распознают и используют для определения ориентации корпуса космического аппарата относительно текущей орбитальной системы координат, отличающийся тем, что для решения навигационной задачи используют орт радиуса-вектора направления на Луну, измеряемый средствами того же оптико-электронного прибора, который используется для распознавания звезд при решении задачи ориентации корпуса космического аппарата, при этом светочувствительная матрица оптико-электронного прибора обеспечивает визирование Луны и звезд с единым временем экспонирования, что позволяет обеспечить привязку орт радиуса-вектора направления на Луну к инерциальному базису с точностью, достаточной для решения навигационной задачи.
2. Способ по п. 1, в котором задачи навигации и ориентации решают параллельно.
| Устройство для укладки затаренных пакетов в мешки | 1961 |
|
SU141801A1 |
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ | 2006 |
|
RU2318188C1 |
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ НА ОСНОВЕ ВИРТУАЛЬНЫХ ИЗМЕРЕНИЙ ЗЕНИТНЫХ РАССТОЯНИЙ ЗВЕЗД | 2010 |
|
RU2454631C1 |
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ ОРБИТЫ И ОРИЕНТАЦИИ КОРПУСА КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ ПРИ ОТСУТСТВИИ АПРИОРНОЙ ИНФОРМАЦИИ | 2013 |
|
RU2542599C2 |
| CN 111739049 B, 01.12.2020 | |||
| CN 108827323 A, 16.11.2018 | |||
| US 5109346 A1, 28.04.1992 | |||
| CN 102607564 B, 17.12.2014. | |||

