Экзоскелетон инвалида относится к машиностроению, в частности для осуществления ходьбы и реабилитации инвалида с нарушенным опорно-двигательным аппаратом, и может быть использован в роботостроении при построении шагающих устройств.
Известен шагающий движитель транспортного средства по авторскому свидетельству №1563104, содержащий траверсу с опорными башмаками, с шарниром на ее центральной части, в котором вращается ведущий вал привода реверсивного вращения, размещенного на корпусе. Однако движитель неустойчив, не имеет связи с корпусом человека, и не может быть использован для ходьбы инвалида.
Известны экзоскелетоны, реализующие идею разгрузки человека, содержащие каркас с элементами крепления к туловищу, рычаги, шарнирно соединенные между собой, например патенты РФ №№2116063, 2200529, 12029, 2362598. Однако они сложны и не обеспечивают автономной ходьбы инвалида с нарушенным опорно-двигательным аппаратом.
Прототипом настоящего изобретения является экзоскелетон по патенту РФ №2110243, но динамические характеристики его низки, функциональные возможности ограничены.
Техническим результатом, на обеспечение которого направлено заявляемое техническое решение, является экзоскелетон, позволяющий инвалиду с нарушенным опорно-двигательным аппаратом ходить по горизонтальной, или с небольшим наклоном, опорной поверхности, подниматься и спускаться по ступеням, садиться и вставать.
Экзоскелетон, содержит опорные стойки и башмаки. Включает в себя траверсу с шарниром на ее центральной части, в котором вращается вал, при этом на концах траверсы установлены шарниры и упорные подшипники, в которых вращаются опорные стойки, снабженные кривошипами, пальцы которых вращаются в шарнирах и упорных подшипниках, размещенных на опорных башмаках, вал соединен с опорными стойками посредством механизма синхронного поворота, причем экзоскелетон вмонтирован в одетый на человека комбинезон, с помощью которого траверса закреплена на тазобедренной части, ноги соединены с башмаками, при этом вал снабжен рычагами, которые связаны с мышечной системой туловища и плеч, являющейся приводом вала.
Согласно второму варианту на опорных башмаках установлены блоки питания и приводы реверсивного вращения опорных стоек.
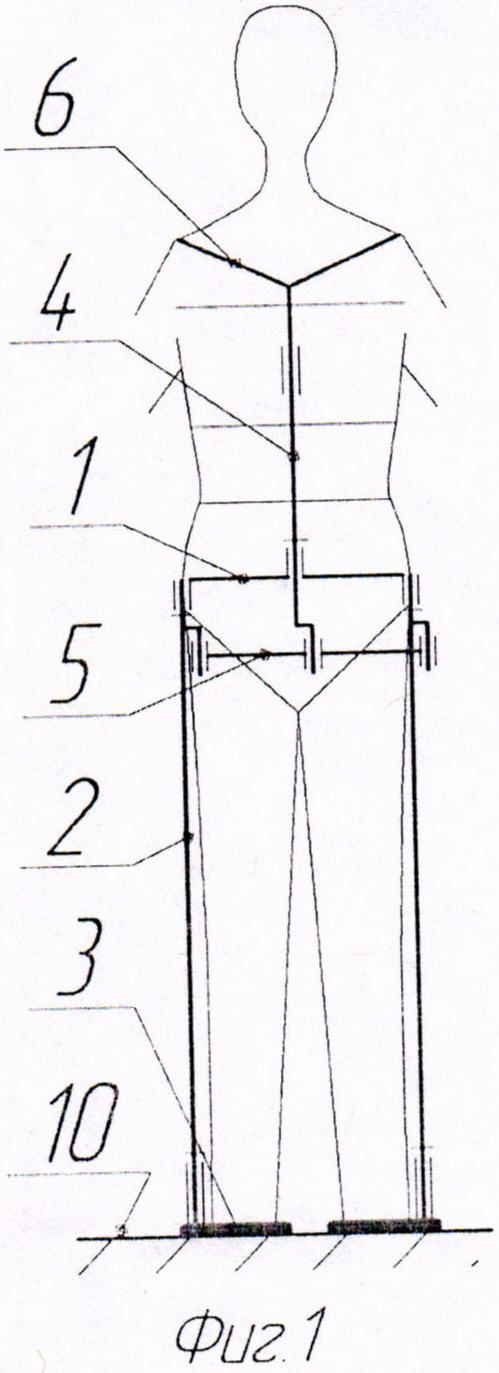
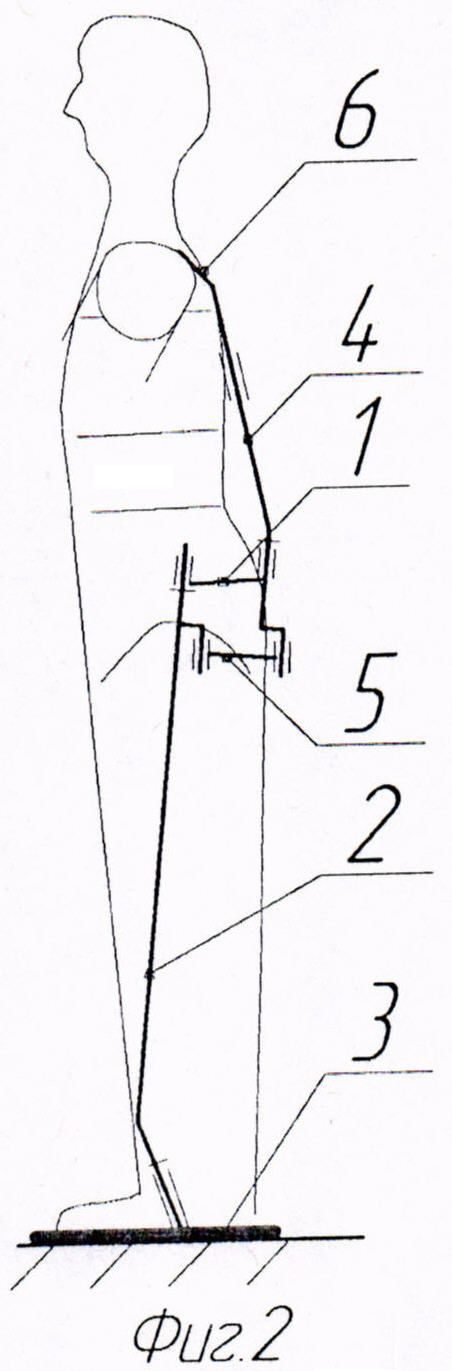
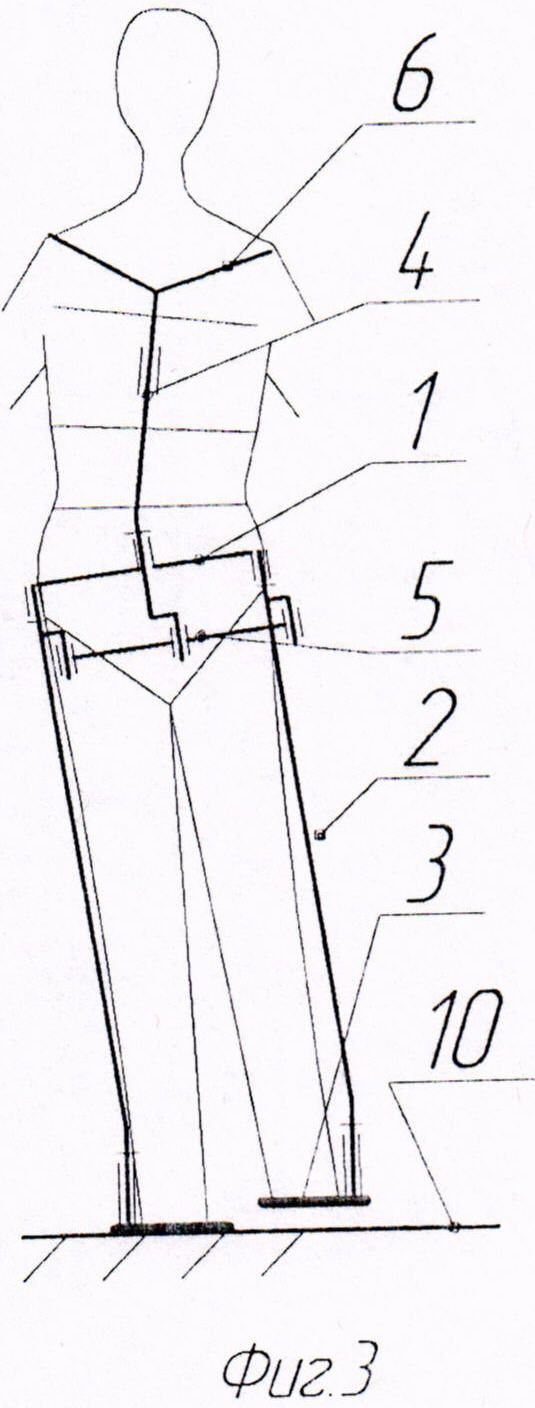
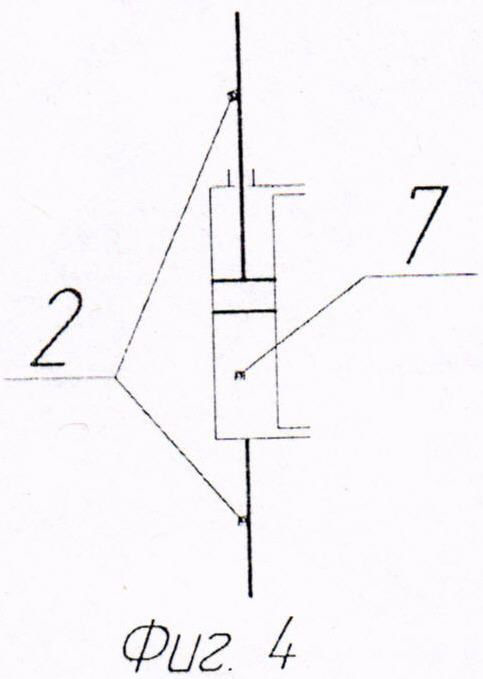
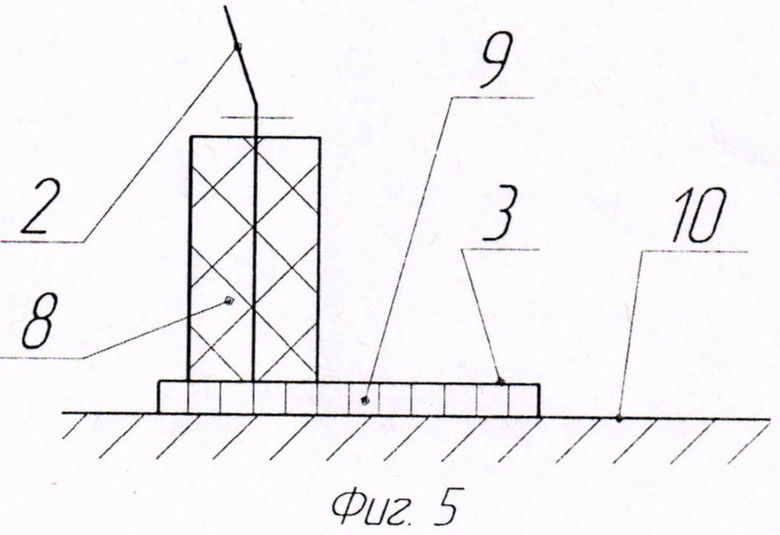
Изобретение поясняется чертежами, где: на фиг.1 - вид сзади в фазе опоры на две ноги; на фиг.2 - вид сбоку; на фиг.3 - вид сзади в фазе шага; на фиг.4 - составная опорная стойка; на фиг.5 - схема размещения привода.
Обозначения на чертежах: 1 - траверса; 2 - стойки; 3 - башмаки; 4 - вал; 5 - параллелограммный механизм синхронного поворота; 6 - рычаги; 7 - гидравлический привод реверсивного поступательного движения; 8 - привод реверсивного вращения; 9 - блок питания; 10 - опорная поверхность.
Экзоскелетон содержит траверсу 1, на концах которой закреплены шарниры и упорные подшипники. В них вращаются опорные стойки 2. Стойки снабжены кривошипами, пальцы которых установлены под углом и вращаются в шарнирах и упорных подшипниках, установленных на опорных башмаках 3. В центре траверсы 1 установлен шарнир, в котором вращается вал 4. Вал 4 со стойками 2 связан параллелограммным механизмом 5 синхронного поворота. Вал 4 снабжен рычагами 6. Все сочленения экзоскелетона вмонтированы в комбинезон, выполненный в виде корсета. Комбинезон одет на инвалида, причем с помощью него траверса 1 закреплена на тазобедренной части, ноги соединены с башмаками 3, а рычаги 6 связаны с мышечной системой туловища и плеч, являющейся приводом вала 4. Стойки 2 выполнены составными, с фиксаторами положения, и снабжены гидравлическими приводами 7 реверсивного поступательного движения.
Согласно второму варианту на опорных башмаках 3 установлены приводы 8 реверсивного вращения опорных стоек и их блоки питания 9.
В фазе опоры на оба башмака 3 сила тяжести, посредством траверсы 1, распределяется на опорные стойки 2 и ноги, а общий центр тяжести направлен вертикально между площадями опорных башмаков. Горизонтальная составляющая сил при этом равна нулю. Положение инвалида устойчиво, и он с расслабленным состоянием мышц может стоять длительное время.
Фаза шага начинается при появлении внутренней силы мышц туловища и плеч, с помощью которой посредством рычагов 6, в шарнире, установленном в центре траверсы 1, поворачивается ведущий вал 4. Связанные с валом посредством механизма 5 синхронно поворачиваются в шарнирах и упорных подшипниках, закрепленных на концах траверсы, стойки 2. Кривошипы опорных стоек поворачиваются в шарнирах и упорных подшипниках, установленных на башмаках 3. Стойки 2 описывают конические поверхности и, как их образующие, при повороте меняют угол наклона к опорной поверхности и башмакам 3. Изменяется положение связанной со стойками траверсы и тазобедренной части инвалида. При ходьбе инвалид поворачивает туловище и плечо, например левое, вперед. Траверса 1 наклоняется и поднимает правую стойку 2 вместе с башмаком 3 над опорной поверхностью, а левый башмак остается на ней опорным. Вместе с траверсой изменяет положение тазобедренная часть, а корпус инвалида изгибается в сторону поворота плеча. Общий центр тяжести смещается влево и вперед. Система приобретает неустойчивость и под действием момента горизонтальной составляющей силы тяжести и внутренних сил, подобно циркулю, поворачивается в шарнире относительно левого опорного башмака. Правый башмак смещается вперед и одновременно опускается на опорную поверхность. Вновь экзоскелетон, опираясь на оба башмака 3, переходит в фазу устойчивого состояния. Начинается новая фаза шага левой ногой.
Подъем по ступеням лестницы происходит следующим образом. Как и при ходьбе, под влиянием сил мышц один опорный башмак проскальзывает по опорной поверхности, но упирается в вертикальную стенку ступени, удерживающую его от поворота. Поднимается над начальной опорной поверхностью и проскальзывает по стенке до уровня опорной поверхности ступени. После чего начинается циркульный поворот экзоскелетона и проскальзывание башмака по опорной поверхности новой ступени. Теперь башмаки располагаются на опорных поверхностях разных уровней, а положение экзоскелетона соответствует фазе устойчивой опоры башмаков на две ступени, и готовности к подъему другою башмака на следующую ступень.
Спуск происходит подобным образом. Находясь обеими башмаками 3 на верхней ступени, инвалид усилием мышц приподнимает один из них. Как при ходьбе по ровной поверхности башмак сдвигается к краю ступени и теряет с ней контакт. После этого происходит реверс поворота плеч и туловища, при котором мышечная система удерживает экзоскелетон от неуправляемого движения вперед. Башмак, проскальзывая по вертикальной стенке ступени, опускается на нижнюю ступень. Экзоскелетон приобретает устойчивость и готовность к дальнейшему спуску.
В случае превышения высоты ступени над высотой максимально возможного подъема башмака включается привод реверсивного прямолинейного движения (гидроцилиндр) 7, составная опорная стойка 2 удлиняется или укорачивается, длина ее фиксируется, например состоянием гидроцилиндра 7. Новая длина опорной стойки устанавливается достаточной для подъема на ступень или спуска с нее.
Путем изменения длины составных опорных стоек 2, с помощью гидроцилиндра 7, инвалид имеет возможность садиться и вставать. Во время уменьшения длины опорных стоек ноги изгибаются в коленных суставах, что имитирует приседание.
Второй вариант технического решения позволяет ходить инвалиду с потерей активности мышц туловища и плеч. Движение осуществляется так. Включаются приводы 8. Стойка 2 поворачивается в шарнире опорного в данный момент башмака 3, а также в шарнире траверсы 1. Посредством механизма 5 поворачиваются вал 4 и вторая стойка 2. Сопряженный с ней башмак поднимается над опорной поверхностью 10, а привод удерживает его от свободного вращения. Одновременно с реверсом приводов происходит циркульный поворот экзоскелетона до устойчивого состояния и опоры на оба башмака. Движения экзоскелетона подобны движению его членов при мышечной активности.
Экзоскелетон дает возможность инвалиду с нарушенным опорно-двигательным аппаратом, используя внутренние силы мыши туловища и плеч, ходить по улице, спускаться и подниматься по лестнице, садиться и вставать. Причем сокращение мышц похоже на сокращение мышц при ходьбе здорового человека. В случае нарушения активности мышц туловища и плеч, предусмотрено принудительное, с помощью приводов реверсивного вращения, работа экзоскелетона и ходьба инвалида.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭКЗОСКЕЛЕТ | 2014 |
|
RU2567589C1 |
| ГРУЗОВОЙ ЭКЗОСКЕЛЕТ, СПИННОЙ КАРДАННЫЙ УЗЕЛ И КОЛЬЦЕВОЙ КАРДАН ГРУЗОВОГО ЭКЗОСКЕЛЕТА | 2014 |
|
RU2563209C2 |
| ПНЕВМАТИЧЕСКИЙ ЭКЗОСКЕЛЕТ | 2020 |
|
RU2747593C1 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| АППАРАТ ПОМОЩИ ПРИ ХОДЬБЕ ЧЕЛОВЕКУ С НАРУШЕНИЕМ ОПОРНО-ДВИГАТЕЛЬНЫХ ФУНКЦИЙ (ВАРИАНТЫ) | 2015 |
|
RU2658481C2 |
| Экзоскелет | 2021 |
|
RU2760527C1 |
| СПОСОБ ОБУЧЕНИЯ ХОДЬБЕ И ДВИЖЕНИЯМ ПАЦИЕНТА С ПСИХОНЕВРОЛОГИЧЕСКИМИ НАРУШЕНИЯМИ И ЗАБОЛЕВАНИЯМИ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2454986C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ВЕРТИКАЛЬНОЙ ПОЗЫ У ИНВАЛИДОВ С ПОРАЖЕНИЕМ ЦЕНТРАЛЬНОЙ НЕРВНОЙ СИСТЕМЫ | 2006 |
|
RU2305534C1 |
| УСТРОЙСТВО ДЛЯ ХОДЬБЫ | 1994 |
|
RU2116062C1 |
| Тренажер для укрепления позвоночника ПОВОРОТНИК и способ его применения | 2021 |
|
RU2766793C1 |
Изобретение относится к травматологии и ортопедии и может быть использовано для осуществления ходьбы и реабилитации инвалида с нарушенным опорно-двигательным аппаратом. Экзоскелетон содержит опорные стойки, башмаки и траверсу с шарниром на ее центральной части, в котором вращается вал. На концах траверсы установлены шарниры и упорные подшипники, в которых вращаются опорные стойки, снабженные кривошипами, пальцы которых вращаются в шарнирах и упорных подшипниках, размещенных на опорных башмаках. Вал соединен с опорными стойками посредством механизма синхронного поворота. Экзоскелетон вмонтирован в одетый на человека комбинезон, с помощью которого траверса закреплена на тазобедренной части. Ноги соединены с башмаками. Вал снабжен рычагами, которые связаны с мышечной системой туловища и плеч, являющейся приводом вала. Изобретение позволяет инвалиду с нарушенным опорно-двигательным аппаратом ходить по горизонтальной, или с небольшим наклоном, опорной поверхности, подниматься и спускаться по ступеням, садиться и вставать. 1 з.п. ф-лы, 5 ил.
1. Экзоскелетон, содержащий опорные стойки и башмаки, включает в себя траверсу с шарниром на ее центральной части, в котором вращается вал, при этом на концах траверсы установлены шарниры и упорные подшипники, в которых вращаются опорные стойки, снабженные кривошипами, пальцы которых вращаются в шарнирах и упорных подшипниках, размещенных на опорных башмаках, вал соединен с опорными стойками посредством механизма синхронного поворота, причем экзоскелетон вмонтирован в одетый на человека комбинезон, с помощью которого траверса закреплена на тазобедренной части, ноги соединены с башмаками, при этом вал снабжен рычагами, которые связаны с мышечной системой туловища и плеч, являющейся приводом вала.
2. Экзоскелетон по п.1, отличающийся тем, что на опорных башмаках установлены блоки питания и приводы реверсивного вращения опорных стоек.
| ЭКЗОСКЕЛЕТОН | 1994 |
|
RU2110243C1 |
| УСТРОЙСТВО ДЛЯ ХОДЬБЫ | 1994 |
|
RU2116063C1 |
| RU 94024295 A1, 27.05.1996 | |||
| УСТРОЙСТВО, ОБЛЕГЧАЮЩЕЕ ХОДЬБУ | 2006 |
|
RU2389469C2 |
| УСТРОЙСТВО, ОБЛЕГЧАЮЩЕЕ ХОДЬБУ | 2006 |
|
RU2389468C9 |
| US 6666796 B1, 23.12.2003 | |||
| JP 2011092507 A, 12.05.2011. | |||

