(54) УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЯМИ КОНЕЧНОСТЕЙ ЭКЗОСКЕЛЕТОНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления протезом нижней конечности | 1982 |
|
SU1041108A1 |
| Устройство для управления движениями протеза | 1980 |
|
SU971311A1 |
| Протез нижней конечности | 1978 |
|
SU806024A1 |
| Устройство координации движений конечностей экзоскелетона | 1978 |
|
SU759099A1 |
| АППАРАТ ПОМОЩИ ПРИ ХОДЬБЕ ЧЕЛОВЕКУ С НАРУШЕНИЕМ ОПОРНО-ДВИГАТЕЛЬНЫХ ФУНКЦИЙ (ВАРИАНТЫ) | 2015 |
|
RU2658481C2 |
| Аппарат ортопедический на нижнюю конечность с микропроцессорным управлением | 2021 |
|
RU2793532C1 |
| АППАРАТ ДЛЯ ПОМОЩИ ПРИ ХОДЬБЕ | 2013 |
|
RU2555801C2 |
| АППАРАТ ПОМОЩИ ПРИ ХОДЬБЕ С СИСТЕМОЙ ОПРЕДЕЛЕНИЯ ЖЕЛАТЕЛЬНЫХ ПАРАМЕТРОВ ШАГА В СРЕДЕ С ПРЕПЯТСТВИЯМИ | 2016 |
|
RU2636419C1 |
| Способ выработки управляющих сигналов и способ ручного управления работой экзоскелетона нижних конечностей на его основе, а также интерфейсы управления работой указанного экзоскелетона в режиме ручного и программного управления, использующие указанный способ выработки | 2016 |
|
RU2638276C1 |
| СПОСОБ ЗАДАНИЯ ЖЕЛАЕМЫХ ТРАЕКТОРИЙ ДВИЖЕНИЯ ЭКЗОСКЕЛЕТА ДЛЯ ПЕРЕДВИЖЕНИЯ ПОЛЬЗОВАТЕЛЯ С НАРУШЕНИЕМ ФУНКЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА, УСТРОЙСТВО СОДЕЙСТВИЯ ХОДЬБЕ ЭТОГО ПОЛЬЗОВАТЕЛЯ И СПОСОБ УПРАВЛЕНИЯ ЭТИМ УСТРОЙСТВОМ | 2015 |
|
RU2598124C1 |
1
Изобретение относится к области медицинской техники, а именно к средствам, обеспечивающим перемещение больных, потерявших способность самостоятельного передвижения.
Известно устройство управления движениями конечностей экзоскелетона, содержащее аккумулятор, коленный щарнир и щарнирно закрепленную стопу 1.
Однако в данном устройстве накопление энергии происходит за счет сил реакции опоры, осуществляющих в фазе опоры переKdc коромысла и запасающих энергию в аккумуляторе, что требует дополнительных энергозатрат со стороны больного и может быть осуществлено лищь при сохранении подвижности в тазобедренном суставе в сторону разгибания. Кроме того, выбор тяг определенных размеров и упругих элементов заданной жесткости требует соверщения определенной кинематики движения (шагания) в фазе опоры для обеспечения заряда аккумулятора и не позволяет регулировать количество энергии, запасаемой в аккумуляторе, и длительность отдачи энергии на движение в щарнире.
Это не позволяет перестроить в процессе ходьбы темп и длину щага.
Целью изобретения является уменьшение энергозатрат больного при ходьбе и обеспечение возможности изменения темпа и длины щага.
Цель достигается тем, что в предлагаемое устройство введены электропривод в виде электродвигателя постоянного тока с редуктором, три электромагнитные муфты,
программирующий блок, схема сравнения, датчик накопленной аккумулятором энергии, выполненный в виде пороговой схемы измерения тока якоря электродвигателя, тактильный датчик, установленный в стопе, и
тазобедренный шарнир, причем электроприпривод, первая электромагнитная муфта, аккумулятор, вторая электромагнитная муфта и тазобедренный щарнир соединены механически последовательно, вход электропривода соединен с первым выходом схемы
сравнения, второй выход которой соединен со вторьщ входом первой электромагнитной муфты, второй выход электропривода соединен с датчиком накопленной аккумулятором энергии, выход которого соединен с первым
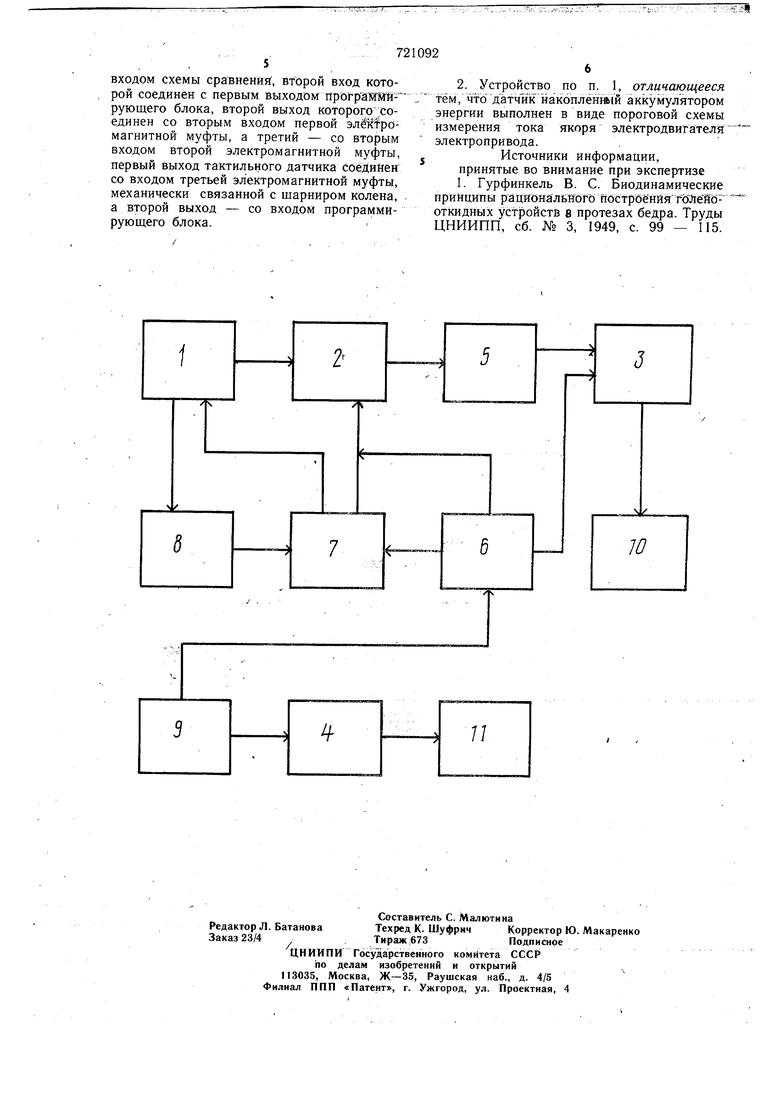
.. -/j-j a: -ifP-i - ВХОДОМ схемы сравнения, второй вход которой соединен с первым выходом программирующего блока, второй выход которого соединен со вторым входом первой электромагнитной муфты, а третий - со вторым входом второй электромагнитной муфты, первый выход тактильного датчика соединен со входом третьей электромагнитной муфты, механически связанной с шарниром колена, а второй выход - со входом программирующего блока. -,-„-. На чертеже изображена блок-схема устройства управления движениями конечностей экзоскелетона (дано для одной конечности)., , Устройство содержит электропривод 1, три электромагнитные муфты 2 - 4, аккумулятор 5, программирующий блок 6, схему 7 сравнения, датчик 8 накопленной энергии, тактильный датчик 9, тазобедренный и коленный шарниры 10 и 11. Устройство работает следующим образом. Настраивают программирующий блок 6 на заданные величины энергии аккумулятора 5 и длительность отдачи энергии, а датчик 8 накопленной аккумулятором энергии -на пороговое значение тока /с электропривода 1 так, чтрбь вьшолнялось условие у rQ при 1 Тн -l/y при /м /, где IH - номинальный ток электродвигателя электропривода в отсутствии нагрузки на валу. Пусть, в начальный момент времени энергия, накопленная аккумулятором 5, равна нулю, и следовательно, сигнал датчика 8 равен нулю. На выходе схемы сравнения появляется сигнал, включающий элект ропривод 1 и электромагнитную муфту 2. По мере работы электропривода энергия в аккумуляторе возрастает. При этом ток якоря электродвигателя растет из-за увеличения нагрузки на валу. В случае превы шения величины тока програмйного значения сигнал с выхода схемы 7 сравнения становится равным нулю, электропривод останавливается, электромагнитная муфта 2 обесточивается, отсоединяя аккумулятор от электропривода.: л. . Таким образом, в аккумуляторе оказывается запасенным заданное количество энергии, и устройство готово к формированию фазы переноса. Для того, чтобы перенести ногу, брльной с помощью рук и кр стыле й наклртаёт свое туловище вперед, образуя опорный треугольник из двух костылей и опорной ноги. При перемещении туловища вперед нагрузка с другой ноги снимается, что приводит к срабатыванию тактильного датчика 9,/Сигнал которого включает программирующий блок 6. Последний включает электромагнитную муфту 3, подключая аккумулятор к тазобедренному шарниру 10 на программно выбранное время. Одновременно с этим сиг721092нал датчика 9 отключает электромагнитную муфту 4, обеспечивающую фиксацию коленного щарнира 11, который освобождается. Энергия аккумулятора приводит к сгибанию ноги в тазобедренном щарнире при одновременном сгибании за счет сил инерции в коленном щарнире. По окончании разряда программный блок отключает аккумулятор от тазобедренного щарнира, обесточивая муфту 3, и подкльрчает его вновь к электроприводу 1, рбеспечивая накопление энергии для следующего . Остальное время фазы переноса, нога движется по инерции и по мере торможения за счет сил веса в тазобедренном шарнире в коленном щарнире начинается разгибание, и нога йынОСйтся вперед. , , . Фаза переноса заканчивается при достижении конечностью опорной поверхности. При этом срабатывает тактильный датчик 9, включающий электромагнитную муфту 4, что приводит к запиранию коленного шарнира. Теперь больной может перенести вес на эту ногу и осуществить движение в фазе опоры. При необходимости изменения в процессе ходьбы параметров шагания изменяют в программирующем блоке задаваемые значения запасаемой энергии и длительности отдачи энергии на движение в .тазобедренном щарнире. Таким образом, данное устройство позволяет посредством импульсного силового воздействия на тазобедренный щарнир обеспечить движение всей ноги экзоскелетона в фазе перенрса с, высокой степенью антропоморфности и перестраивать темп и длину шага в процессе ходьбы. Формула изобретения 1. Устройство управления дв жениями конечностей экзоскелетона, содержащее аккумулятор, коленный шарнир, шарнирно закрепленную , отличающееся тем, что, с целью уменьшения энергозатрат больного при ходьбе VI рбеспечения врзможности изменения темпаГ и длины шага, в него введены электропривод, три электромагнитные муфты программирующий блок, схема сравнения, .ик накрпленной аккумулятором энергии, тактильный датчик, установленный в стопе, и тазобедренный щарнир, причем электропривод, первая электромагнитная муфтй, аккумулятор, вторая электромагнитная муфта и тазобедренный шарнир соединены механи ески последовательно, вход электропривода соединен с первым выходом схемы сравнения, второй выход которой соединен ср вторым входом первой электромагнитной муфты, второй выход электропривода соединён с датчиком накопленной аккумулятором энергии, выход которого соединен с первым 5 входом схемы сравнения , второй вход которои соединен с первым выходом програММй- рующего блока, второй выход которого ;соединен со вторым входом первой элШ ромагнитной муфты, а третий - со вторым входом второй электромагнитной муфты, первый выход тактильного датчика соединен со входом третьей электромагнитной муфты, механически связанной с шарниром колена, а второй выход - со входом программирующего блока. 7 6 2. Устройство по п. 1, отличающееся тем, что датчик накопленный аккумулятором энергии выполнен в виде пороговой схемы измерения тока якоря электродвигЁтеля электропривода. Источники информации, принятые во внимание при экспертизе 1. Гурфинкель В. С. Биодинамические принципы рационального пбСтрбёнйяТШейо откидных устройств в протезах бедра. Труды ЦНИИПП, сб. № 3, 1949, с. 99
