ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область техники
[0001] Настоящее изобретение относится к устройству оказания содействия при предотвращении столкновения и к способу оказания содействия при предотвращении столкновения, которые поддерживают управление предотвращением столкновения транспортного средства с объектом.
2. Описание предшествующего уровня техники
[0002] Обычно устройство оказания содействия при предотвращении столкновения, которое оказывает содействие при предотвращении столкновения транспортного средства, получает информацию о дорожной обстановке, требующую управления торможением транспортного средства, например, о перекрестках, местах остановки, о поворотах дороги и о приближении встречного транспортного средства, при помощи установленной в транспортном средстве камеры или системы навигации. Устройство оказания содействия при предотвращении столкновения выполняет оказание содействия при управлении транспортным средством, такое как поддержка при торможении посредством выдаваемых с помощью голосовых команд указаний выполнить торможение или полупринудительное применение тормозного усилия, на основе полученной информации о дорожной обстановке рядом с транспортным средством.
[0003] С другой стороны, когда операции оказания содействия при управлении транспортным средством выполняются слишком часто, водитель может чувствовать дискомфорт или раздражение из-за выполнения операции оказания содействия при управлении транспортным средством, которую он считает ненужной. Поэтому в последнее время велись исследования по блокированию оказания содействия при управлении транспортным средством в условиях, когда необходимость оказания содействия при управлении транспортным средством расценивается как низкая. Например, устройство, описанное в публикации японской патентной заявки №2007-145315 (JP 2007-145315 А), определяет, что необходимость оказания содействия при управлении транспортным средством является низкой, и блокирует оказание содействия при управлении транспортным средством, когда угол поворота управляемых колес транспортного средства равен заранее заданному углу или больше него.
[0004] Даже когда угол поворота управляемых колес транспортного средства равен заранее заданному углу или больше него, возникает ситуация, в которой необходимость оказания содействия при управлении транспортным средством остается высокой. То есть, если поддержка управления транспортным средством блокируется всякий раз, когда угол поворота управляемых колес транспортного средства равен заранее заданному углу или больше него, оказание содействия при управлении транспортным средством может блокироваться в ситуации, когда оказание содействия при управлении транспортным средством действительно необходимо. С другой стороны, если блокирование оказания содействия при управлении транспортным средством запрещается всякий раз, когда угол поворота управляемых колес транспортного средства равен заранее заданному углу или больше него, может выполняться излишнее оказание содействия при управлении транспортным средством в реальных ситуациях дорожного движения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Настоящее изобретение предлагает устройство оказания содействия при предотвращении столкновения и способ оказания содействия при предотвращении столкновения, которые могут способствовать надлежащему регулированию оказания содействия при управлении транспортным средством посредством более точного выполнения оказания содействия при управлении транспортным средством.
[0006] Далее будут описаны возможности и технические преимущества изобретения.
[0007] Согласно одному из объектов настоящего изобретения предлагается устройство оказания содействия при предотвращении столкновения, которое оказывает содействие при предотвращении столкновения транспортного средства с объектом и которое содержит блок управления содействием, сконфигурированный для выполнения управления содействием при предотвращении столкновения; блок блокирования содействия, сконфигурированный для блокирования содействия, осуществляемого блоком управления содействием, когда угол поворота управляемых колес транспортного средства равен заранее заданному углу или больше него; и блок ограничения вмешательства, сконфигурированный для определения, необходимо ли блокирование содействия, осуществляемое блоком блокирования содействия, когда угол поворота управляемых колес равен заранее заданному углу или больше него, на основе информации о транспортном средстве, полученной от транспортного средства, или о текущем окружении транспортного средства, и для ограничения вмешательства в виде блокирования содействия, осуществляемого блоком блокирования содействия, в зависимости от результатов определения.
[0008] Согласно одному из объектов настоящего изобретения предложен способ оказания содействия при предотвращении столкновения для содействия предотвращению столкновения транспортного средства с объектом, который включает в себя следующие этапы: выполнение управления содействием при предотвращении столкновения; блокирование содействия, когда угол поворота управляемых колес транспортного средства равен заранее заданному углу или больше него; и определение того, необходимо ли блокирование содействия при блокировании управления содействием, когда угол поворота управляемых колес равен заранее заданному углу или больше него, на основе информации о транспортном средстве, полученной от транспортного средства, или о текущем окружении транспортного средства, и ограничение вмешательства в виде блокирования содействия при блокировании содействием в зависимости от результатов определения.
[0009] При применении указанного устройства или способа определяется, необходимо ли блокирование, когда угол поворота управляемых колес равен заранее заданному углу или больше него. Вмешательство в виде блокирования ограничивается в зависимости от результатов определения. Соответственно, даже когда поддерживается блокирование содействия для предотвращения столкновения, поскольку угол поворота управляемых колес равен заранее заданному углу или больше него, это блокирование ограничивается на основе информации о транспортном средстве, полученной от транспортного средства, или о текущем окружении транспортного средства. Как следствие, выполняется блокирование содействия предотвращению столкновения на основе информации о транспортном средстве или о текущем окружении транспортного средства, и при этом производится коррекция содействия при предотвращении столкновения.
[0010] Блок ограничения вмешательства может ограничивать вмешательство в виде блокирования содействия, осуществляемое блоком блокирования содействия, когда положение устройства переключения передач, которое управляет движением и остановкой транспортного средства, переключено из диапазона положений при остановке в диапазон положений при движении.
[0011] Согласно данной конфигурации, блок ограничения вмешательства ограничивает вмешательство в виде блокирования содействия, осуществляемого блоком блокирования содействия, при условии, что положение устройства переключения передач, которое управляет движением и остановкой транспортного средства, переключено из диапазона положений при остановке в диапазон положений при движении. То есть, когда положение устройства переключения передач переключено из диапазона положений при остановке в диапазон положений при движении, увеличивается частота, с которой водитель ошибочно переключает механизм переключения передач в нежелательное положение при движении вместо желаемого положения при движении. В этой связи, благодаря ограничению блокирования содействия предотвращению столкновения, в данных условиях снижается уровень ошибок при выполнении содействия при предотвращении столкновения.
[0012] Блок ограничения вмешательства может не ограничивать вмешательство в управление блока блокирования содействия при условии, что положение устройства переключения передач, которое управляет движением и остановкой транспортного средства, переключено из диапазона положений при остановке в диапазон положений при движении, и выполнено, по меньшей мере, одно из следующих условий: условие, согласно которому величина пробега транспортного средства после переключения передачи равна заранее заданному расстоянию или больше него, и условие, согласно которому время, прошедшее после переключения передачи, равно заранее заданному времени или больше него.
[0013] Блок ограничения вмешательства может не ограничивать вмешательство в управление блока блокирования содействия при условии, что положение устройства переключения передач, которое управляет движением и остановкой транспортного средства, переключено из положения при остановке в положение при движении, и соблюдено, по меньшей мере, одно из следующих условий: условие, согласно которому величина пробега транспортного средства после переключения передачи равна заранее заданному расстоянию или больше него, условие, согласно которому время, прошедшее после переключения передачи, равно заранее заданному времени или больше него, и условие, согласно которому скорость движения транспортного средства равна заранее заданной скорости или больше нее.
[0014] Когда диапазон положений устройства переключения передач установлен как диапазон положений при остановке, рядом с транспортным средством нередко находятся такие объекты, как другой транспортное средство, магазин или колесоотбойник. При переключении в диапазон положений при движении транспортное средство может приблизиться к объектам и столкнуться с ними, в зависимости от направления движения. Соответственно, прежде чем транспортное средство достигнет местоположения объекта, находящегося рядом с транспортным средством, когда устройство переключения передач находится в положении при остановке, высока необходимость ограничивать блокирование содействия при предотвращении столкновения. В этой связи, согласно данной конфигурации, благодаря выполнению содействия при предотвращении столкновения в начальный момент движения, можно однозначно избежать столкновения с объектом, находящимся рядом с транспортным средством.
[0015] Переключение из диапазона положений при остановке в диапазон положений при движении может представлять собой переключение из положения парковочной передачи или нейтральной передачи в одно из следующих положений: первая передача, главная передача и передача заднего хода устройства переключения передач транспортного средства.
[0016] Согласно данной конфигурации, переключение устройства переключения передач транспортного средства из положения парковочной передачи или нейтральной передачи в любое из следующих положений: первую передачу, главную передачу и передачу заднего хода описывается как переключение из диапазона положений при остановке в диапазон положений при движении. Соответственно, даже когда переключение устройства переключения передач может быть выполнено по ошибке из положения парковочной передачи или нейтральной передачи в одно из следующих положений: первую передачу, главную передачу, и передачу заднего хода, выполняется содействие предотвращению столкновения транспортного средства с объектом в результате ошибочного действия. Как следствие, предотвращается столкновение транспортного средства с объектом в результате ошибочного переключения устройства переключения передач, при условии, что угол поворота управляемых колес равен заранее заданному углу или больше него.
[0017] В данной конфигурации стояночный тормоз транспортного средства может представлять собой электрический стояночный тормоз, который электрически переключается между двумя положениями: ВКЛЮЧЕН и ВЫКЛЮЧЕН, а блок ограничения вмешательства может не ограничивать вмешательство в виде блокирования содействия, осуществляемого блоком блокирования содействия, когда электрический стояночный тормоз переключен из положения ВКЛЮЧЕН в положение ВЫКЛЮЧЕН.
[0018] Стояночный тормоз транспортного средства может представлять собой электрический стояночный тормоз, который электрически переключается между двумя положениями: ВКЛЮЧЕН и ВЫКЛЮЧЕН, и переключение из диапазона положений при остановке в диапазон положений при движении может представлять собой переключение электрического стояночного тормоза из положения ВКЛЮЧЕН в положение ВЫКЛЮЧЕН.
[0019] В данной конфигурации блокирование содействия при предотвращении столкновения ограничено с учетом положения электрического стояночного тормоза: ВКЛЮЧЕН или ВЫКЛЮЧЕН. Соответственно, необходимое регулирование содействия при предотвращении столкновения выполняется даже в случае транспортного средства, оснащенного электрическим стояночным тормозом. То есть, даже когда стояночный тормоз переключен в положения ВКЛЮЧЕН и ВЫКЛЮЧЕН в рамках различных схем операций, выполняется необходимое регулирование содействия при предотвращении столкновения. Блок ограничения вмешательства может ограничивать вмешательство в виде блокирования содействия, осуществляемого блоком блокирования поддержки, когда обнаружен объект, находящийся в пределах заранее заданного расстояния от транспортного средства.
[0020] В данной конфигурации, когда объект находится в пределах заранее заданного расстояния от транспортного средства, ограничивается блокирование содействия при предотвращении столкновения, выполняемое блоком блокирования содействия. Соответственно, даже когда объект находится в пределах заранее заданного расстояния от транспортного средства, однако угол поворота управляемых колес равен заранее заданному углу или больше него, выполняется содействие при предотвращении столкновения. Соответственно, можно избежать приближения к объекту, находящемуся рядом с транспортным средством. Даже когда объект находится не спереди по ходу движения транспортного средства, однако объект находится в пределах заранее заданного расстояния от транспортного средства, водитель испытывает меньший дискомфорт в результате выполнения содействия при предотвращении столкновения, несмотря на выполнение содействия при предотвращении столкновения. Соответственно, возможно снизить чувство дискомфорта у водителя и обеспечить содействие при предотвращении столкновения.
[0021] Блок ограничения вмешательства может не ограничивать вмешательство в виде блокирования содействия, осуществляемого блоком блокирования содействия, при условии, что соблюдено, по меньшей мере, одно из следующих условий: условие, согласно которому прошло заранее заданное время, после того как припаркованное или стоящее транспортное средство начало движение, и условие, согласно которому транспортное средство проехало заранее заданное расстояние после начала движения транспортного средства.
[0022] Когда припаркованное или стоящее транспортное средство начинает движение, довольно часто выполняются ошибочные действия, и высока вероятность того, что транспортное средство столкнется с объектом, находящимся рядом с транспортным средством. В этой связи, согласно данной конфигурации, ограничивается блокирование содействия при предотвращении столкновения в течение заранее заданного периода времени или в пределах заранее заданного расстояния, после того как припаркованное или стоящее транспортное средство начало движение. Соответственно, обеспечивается выполнение содействия при предотвращении столкновения в ситуации, когда есть вероятность выполнения ошибочной операции.
[0023] Блок ограничения вмешательства может ограничивать вмешательство в виде блокирования содействия, осуществляемого блоком блокирования содействия, при условии, что соблюдено, по меньшей мере, одно из следующих условий: условие, согласно которому обнаружено, по меньшей мере, одно из следующих действий: освобождение стояночного тормоза, пристегивание ремня безопасности, включение замка зажигания и включение в положение для привода вспомогательных агрегатов, и условие, согласно которому скорость движения транспортного средства находится в заранее заданном диапазоне значений скорости.
Блок ограничения вмешательства может не ограничивать вмешательство в виде блокирования содействия, осуществляемого блоком блокирования содействия, при условии, что соблюдено, по меньшей мере, одно из следующих условий: условие, согласно которому прошло заранее заданное время после обнаружения, по меньшей мере, одного из следующих действий: освобождение стояночного тормоза, пристегивание ремня безопасности, включение замка зажигания и включение в положение для привода вспомогательных агрегатов; и условие, согласно которому величина пробега транспортного средства равна заранее заданному расстоянию или больше него после обнаружения, по меньшей мере, одного из следующих действий: освобождение стояночного тормоза, пристегивание ремня безопасности, включение замка зажигания и включение в положение для привода вспомогательных агрегатов.
[0024] Когда обнаружено, по меньшей мере, одно из следующих действий: освобождение стояночного тормоза, пристегивание ремня безопасности, включение замка зажигания и включение в положение для привода вспомогательных агрегатов, существует большая вероятность того, что припаркованное или стоящее транспортное средство начнет движение. Соответственно, в вышеописанной конфигурации, благодаря ограничению блокирования содействия при предотвращении столкновения на основе определения вышеуказанных факторов, можно безошибочно ограничить блокирование содействия при предотвращении столкновения, когда припаркованное или стоящее транспортное средство начинает движение. Согласно вышеописанной конфигурации, также можно безошибочно ограничить блокирование содействия при предотвращении столкновения до подтверждения, что прошел заранее заданный период времени или транспортное средство проехало заранее заданное расстояние после начала движения транспортного средства.
[0025] В данной конфигурации, после того как скорость движения транспортного средства стала ниже заранее заданной скорости, когда скорость движения транспортного средства находится в заранее заданном диапазоне значений скорости, водитель часто выполняет ошибочные действия, и блокирование содействия при предотвращении столкновения ограничено. Соответственно, гарантируется выполнение содействия при предотвращении столкновения при движении на малой скорости.
[0026] Блок ограничения вмешательства может не ограничивать вмешательство в виде блокирования содействия, осуществляемого блоком блокирования содействия, при условии, что соблюдено, по меньшей мере, одно из следующих условий: условие, согласно которому прошло заранее заданное время после переключения ключа зажигания из положения ВЫКЛЮЧЕНО в положение ВКЛЮЧЕНО, и условие, согласно которому транспортное средство проехало заранее заданное расстояние после переключения ключа зажигания из положения ВЫКЛЮЧЕНО в положение ВКЛЮЧЕНО.
[0027] Блок ограничения вмешательства может не ограничивать вмешательство в виде блокирования содействия, осуществляемого блоком блокирования содействия, при условии, что скорость движения транспортного средства равна заранее заданной скорости движения или больше нее.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0028] Отличительные признаки, технические результаты, а также техническое и промышленное значение примеров осуществления изобретения будут описаны со ссылками на прилагаемые чертежи, в которых одинаковые ссылочные позиции обозначают одинаковые элементы, и где:
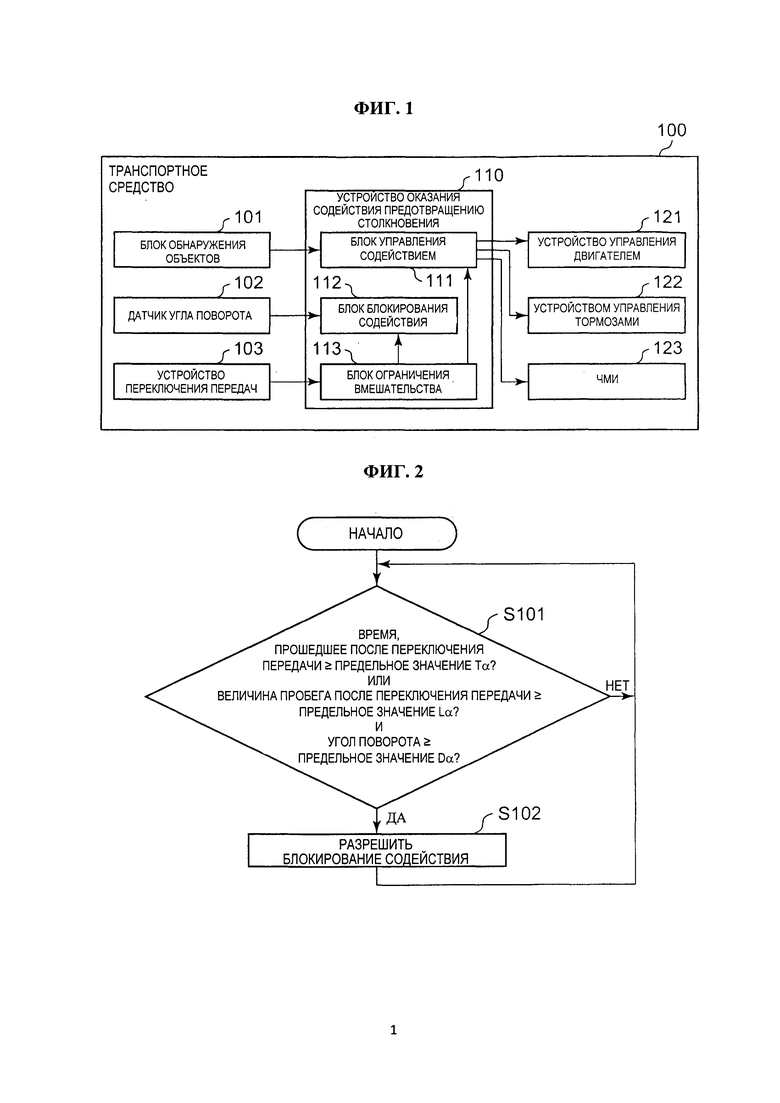
Фиг. 1 представляет собой структурную схему, схематически изображающую конфигурацию транспортного средства, в котором применены устройство оказания содействия при предотвращении столкновения и способ оказания содействия при предотвращении столкновения согласно первому варианту осуществления настоящего изобретения;
Фиг. 2 представляет собой блок-схему, иллюстрирующую пример процедуры ограничения блокирования содействия при предотвращении столкновения согласно первому варианту осуществления изобретения;
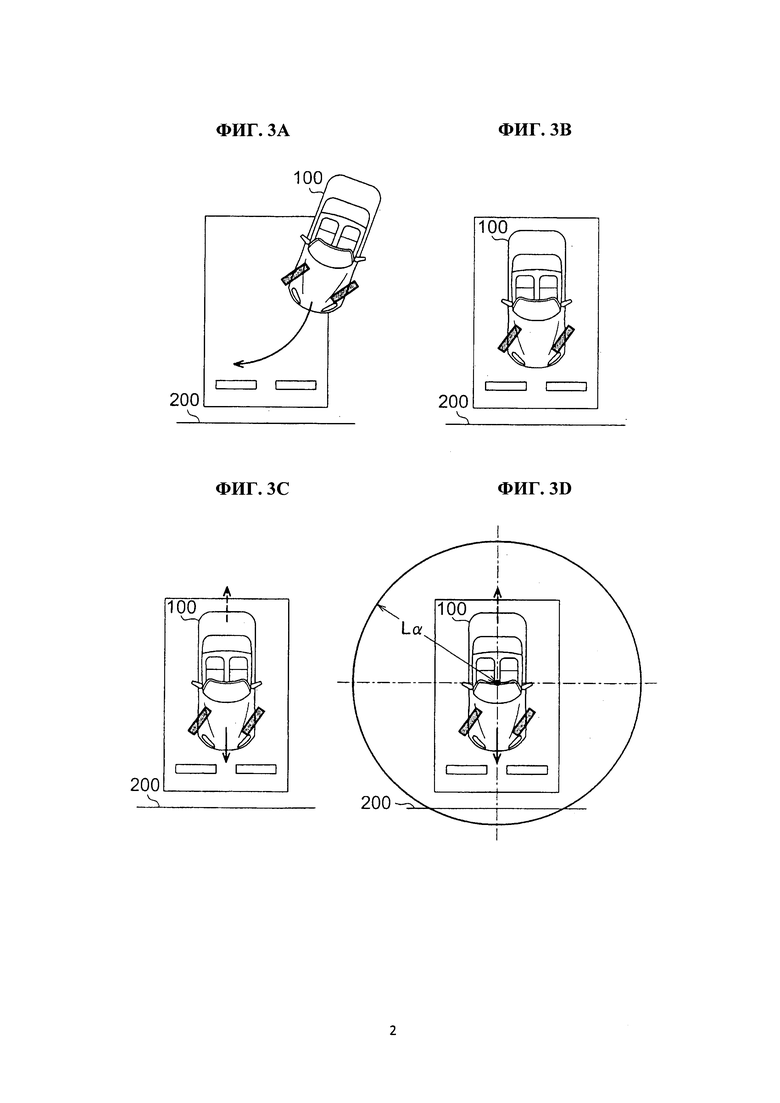
Фиг. 3А представляет собой схему, на которой изображен пример припаркованного и стоящего транспортного средства, когда угол поворота управляемых колес равен заранее заданному углу или больше него;
Фиг. 3В представляет собой схему, на которой изображен пример припаркованного и стоящего транспортного средства, когда угол поворота управляемых колес равен заранее заданному углу или больше него;
Фиг. 3С представляет собой схему, на которой изображен пример припаркованного и стоящего транспортного средства, когда угол поворота управляемых колес равен заранее заданному углу или больше него;
Фиг. 3D представляет собой схему, на которой изображен пример припаркованного и стоящего транспортного средства, когда угол поворота управляемых колес равен заранее заданному углу или больше него;
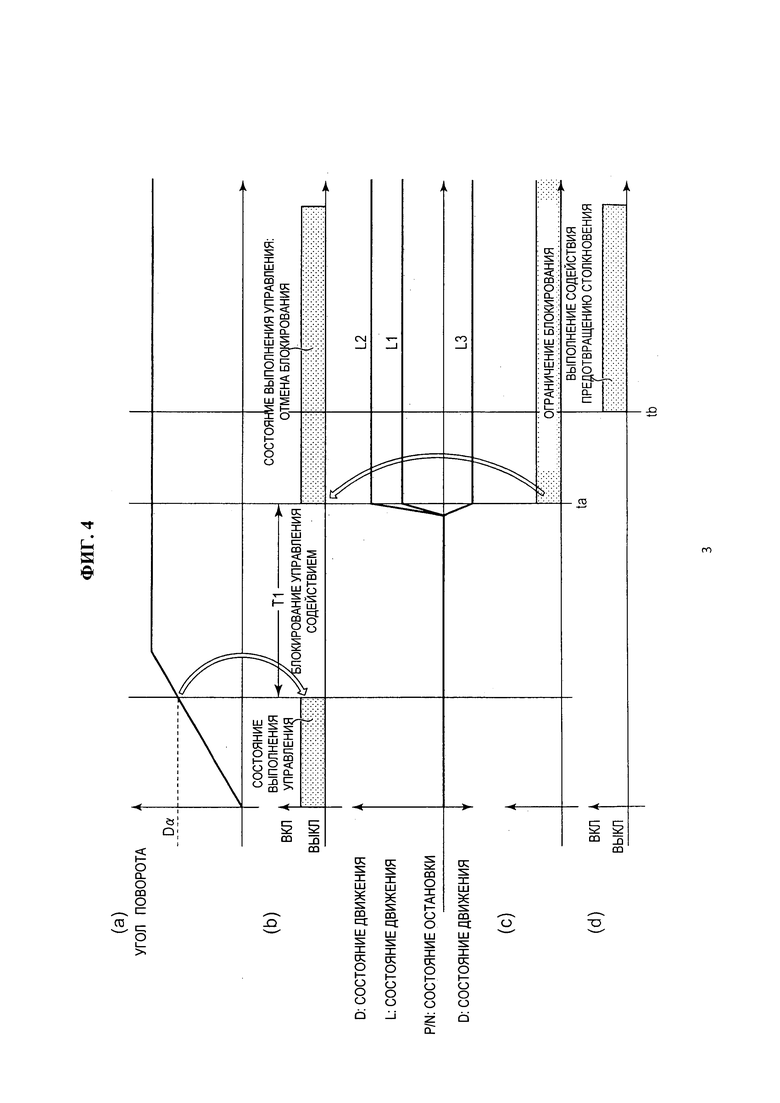
Фиг. 4 (а)-(d) представляют собой временные диаграммы, на которых изображен пример развития событий при ограничении блокирования содействия предотвращению столкновения согласно первому варианту осуществления изобретения;
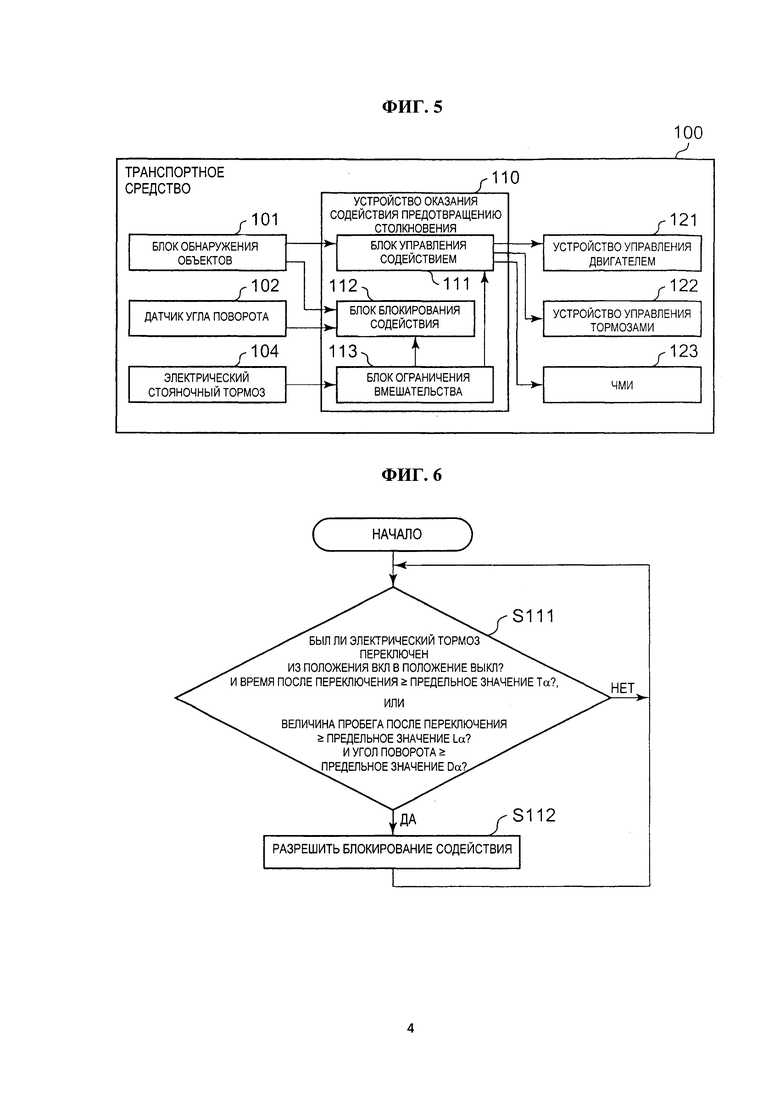
Фиг. 5 представляет собой структурную схему, схематически изображающую конфигурацию транспортного средства, в котором применяются устройство оказания содействия при предотвращении столкновения и способ оказания содействия при предотвращении столкновения согласно второму варианту осуществления настоящего изобретения;
Фиг. 6 представляет собой блок-схему, иллюстрирующую пример процедуры ограничения блокирования содействия при предотвращении столкновения согласно второму варианту осуществления изобретения;
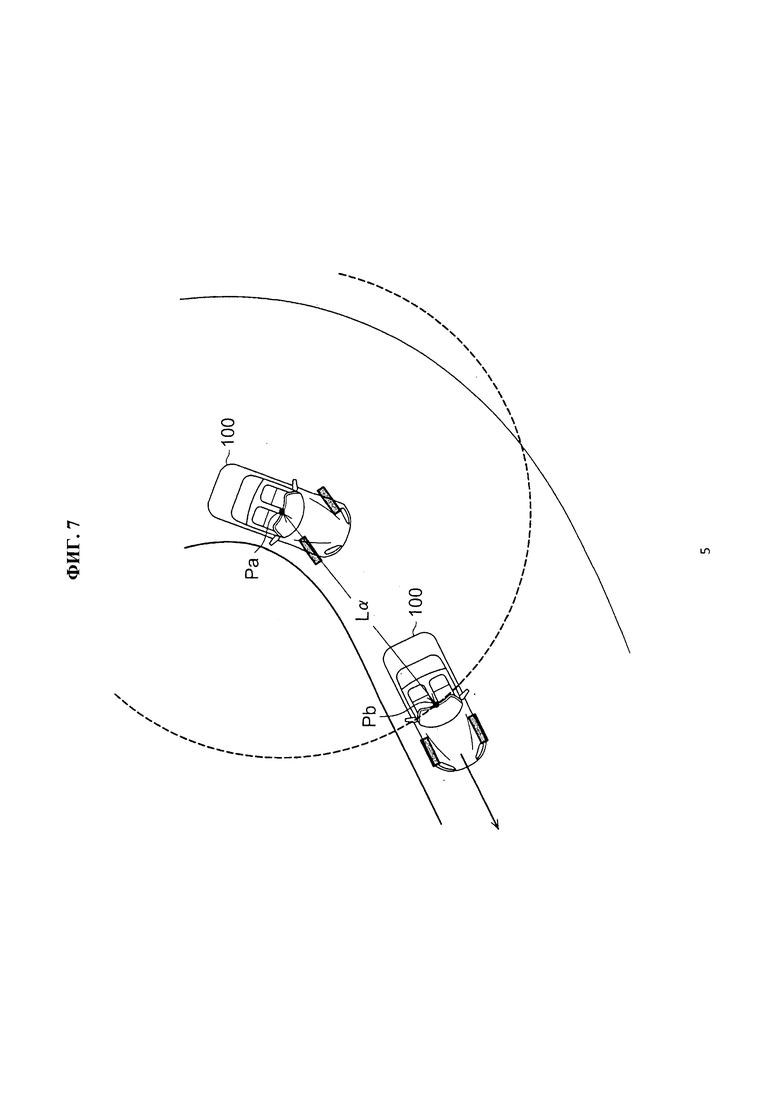
Фиг. 7 представляет собой схему, на которой изображен пример припаркованного и стоящего транспортного средства, когда угол поворота управляемых колес равен заранее заданному углу или больше него;
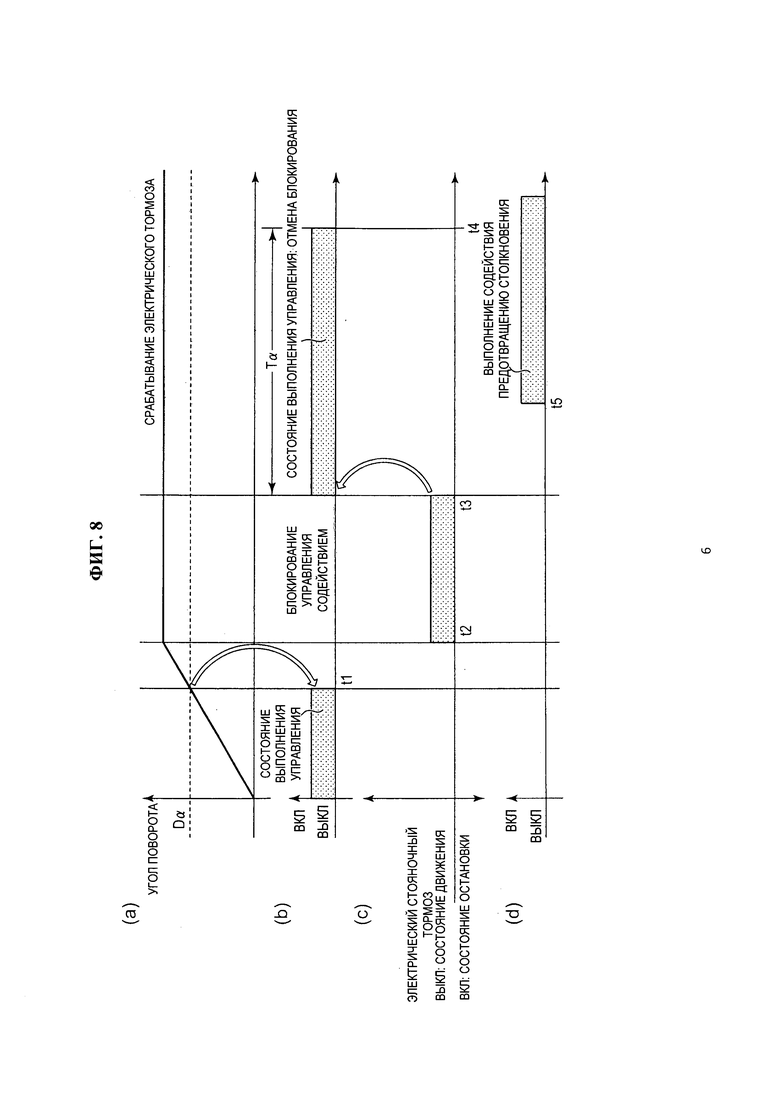
Фиг. 8 (а)-(d) представляют собой временные диаграммы, на которых изображен пример развития событий при ограничении блокирования содействия при предотвращении столкновения согласно второму варианту осуществления изобретения;
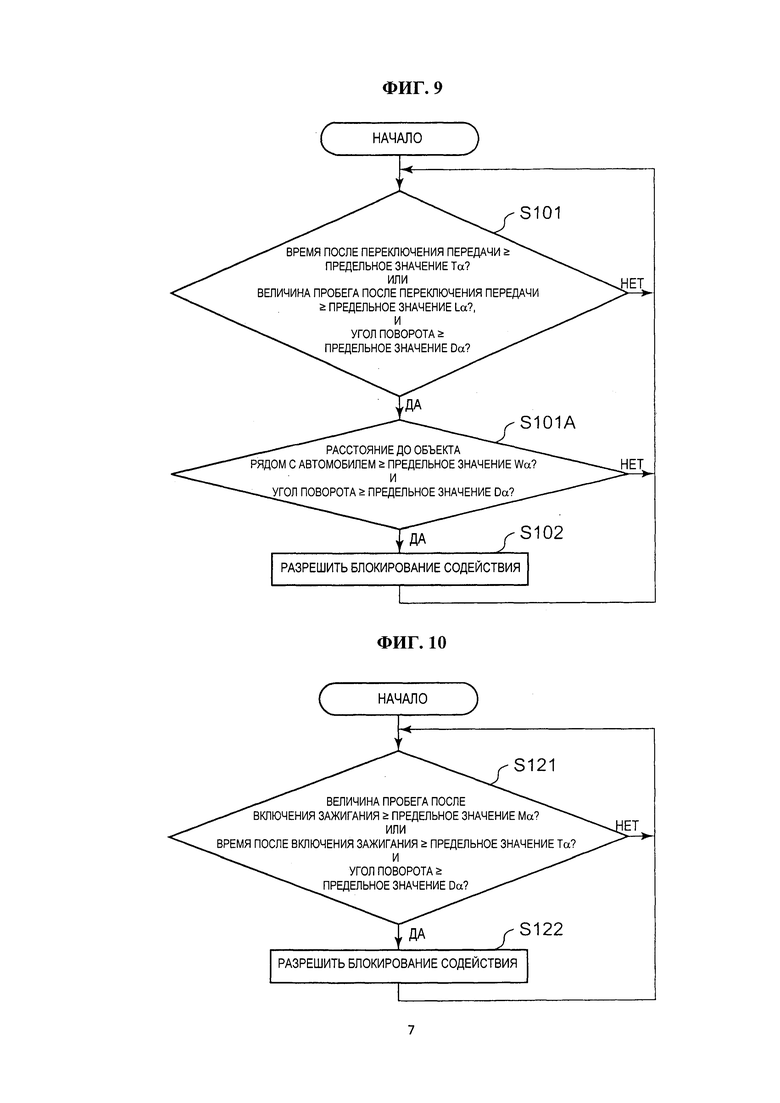
Фиг. 9 представляет собой блок-схему, на которой изображен пример процедуры ограничения блокирования содействия при предотвращении столкновения, выполняемой в устройстве оказания содействия при предотвращении столкновения и способе оказания содействия при предотвращении столкновения согласно третьему варианту осуществления изобретения;
Фиг. 10 представляет собой блок-схему, на которой изображен пример процедуры ограничения блокирования содействия при предотвращении столкновения, выполняемой в устройстве оказания содействия при предотвращении столкновения и способе оказания содействия при предотвращении столкновения согласно четвертому варианту осуществления изобретения;
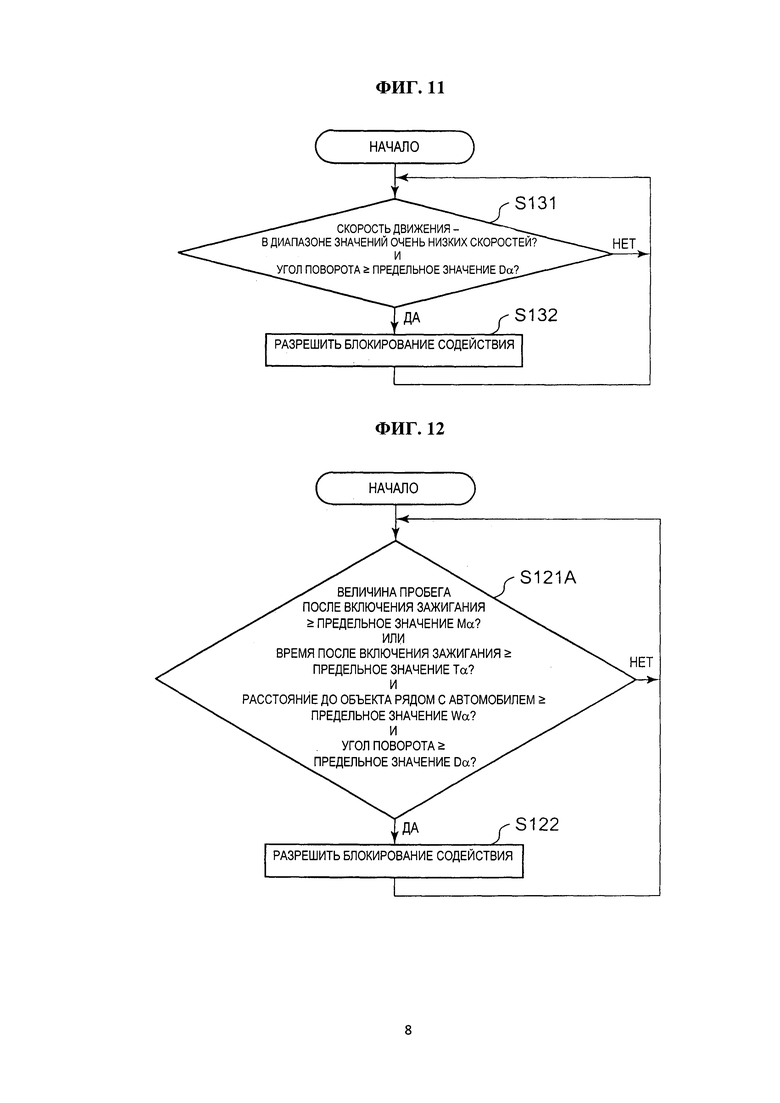
Фиг. 11 представляет собой блок-схему, на которой изображен пример процедуры ограничения блокирования содействия при предотвращении столкновения, выполняемой в устройстве оказания содействия при предотвращении столкновения и способе оказания содействия при предотвращении столкновения согласно пятому варианту осуществления изобретения; и
Фиг. 12 представляет собой блок-схему, на которой изображен пример процедуры ограничения блокирования содействия при предотвращении столкновения, выполняемой в устройстве оказания содействия при предотвращении столкновения и способе оказания содействия при предотвращении столкновения согласно еще одному варианту осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0029] Первый вариант осуществления изобретения
Далее первый вариант осуществления изобретения, в котором реализованы устройство оказания содействия при предотвращении столкновения и способ оказания содействия при предотвращении столкновения согласно настоящему изобретению, будет описан со ссылкой на фиг. 1-4.
[0030] Как показано на фиг. 1, транспортное средство, в котором применяются устройство оказания содействия при предотвращении столкновения и способ оказания содействия при предотвращении столкновения согласно настоящему варианту осуществления изобретения, включает блок 101 обнаружения объектов, который определяет присутствие, например, человека или транспортного средства, который находится рядом с транспортным средством 100, в качестве цели содействия. Транспортное средство 100 включает датчик 102 угла поворота управляемых колес, который определяет угол поворота управляемых колес транспортного средства 100. Транспортное средство 100 включает в себя устройство 103 переключения передач, которое выполняет переключение между состоянием движения и состоянием остановки транспортного средства 100 в ответ на выполнение водителем переключения передач.
[0031] Блок 101 обнаружения объектов представляет собой, например, ультразвуковой датчик и определяет присутствие объекта или расстояние между транспортным средством 100 и объектом на основе условий отражения ультразвуковых волн. Блок 101 обнаружения объектов выдает сигнал, содержащий результаты определения, в устройство 110 оказания содействия при предотвращении столкновения. Датчик 102 угла поворота управляемых колес определяет угол поворота управляемых колес, который может меняться в зависимости от действий водителя, и выдает сигнал, содержащий результаты определения, в устройство 110 оказания содействия при предотвращении столкновения.
[0032] Устройство 103 переключения передач определяет состояние переключения механизма переключения передач и выдает сигнал, содержащий результаты определения, в устройство 110 оказания содействия при предотвращении столкновения. Нейтральная передача и парковочная передача, которые соответствуют диапазону положений при остановке, заданы в механизме переключения передач для переключения состояния транспортного средства 100 в состояние остановки. Первая передача, главная передача и передача заднего хода, которые соответствуют диапазону при движении, заданы в механизме переключения передач для переключения состояния транспортного средства 100 в состояние движения. В данном варианте осуществления изобретения информация, передаваемая из устройства 103 переключения передач в устройство 110 оказания содействия при предотвращении столкновения, используется в качестве информации о транспортном средстве для принятия решения, необходимо ли содействие при предотвращении столкновения.
[0033] Устройство 110 оказания содействия при предотвращении столкновения содержит блок 111 управления содействием, который выполняет управление содействием при предотвращении столкновения, и блок 112 блокирования содействия, который блокирует содействие, осуществляемое блоком 111 управления содействием, при условии, что угол поворота управляемых колес транспортного средства 100 равен заранее заданному углу или больше него. Устройство 110 оказания содействия при предотвращении столкновения содержит блок 113 ограничения вмешательства, который определяет, необходимо ли блокирование, когда угол поворота управляемых колес равен заранее заданному углу или больше него, на основе информации о транспортном средстве, полученной от транспортного средства 100, или о текущем окружении транспортного средства 100, и который ограничивает вмешательство в управление в виде блокирования управления, выполняемого блоком 112 блокирования содействия на основе результатов определения. Например, сигнал, содержащий результат определения блоком 101 обнаружения объектов, данные изображения, полученного от установленной в транспортном средстве камеры и информация об инфраструктуре используются в качестве информации о транспортном средстве, полученной от транспортного средства 100. Примеры текущего окружения транспортного средства 100 включают в себя положение автомобилей, находящихся рядом с транспортным средством 100, относительно транспортного средства 100, дорожную обстановку и присутствие объекта рядом с транспортным средством. Текущее окружение определяется на основе сочетания данных GPS и картографических данных, анализа данных изображения, полученного от установленной в транспортном средстве камеры, определения информации о сооружениях и т.п.
[0034] Блок 111 управления содействием выполняет управление предотвращением столкновения транспортного средства 100 с объектом, например, когда результат определения блоком 101 обнаружения объектов указывает на то, что имеется объект, расположенный по ходу движения транспортного средства 100. Блок 111 управления содействием выполняет управление предотвращением столкновения транспортного средства 100 с объектом, например, когда результат определения блоком 101 обнаружения объектов указывает на то, что расстояние до объекта, расположенного по ходу движения транспортного средства 100, равно заранее заданному расстоянию или меньше него. Блок 111 управления содействием выдает сигнал уменьшить обороты двигателя в устройство 121 управления двигателем в качестве управления содействием при предотвращении столкновения. Блок 111 управления содействием выдает сигнал применить, независимо от использования водителем устройства 122 управления тормозами, заранее заданное тормозное усилие для автоматического выполнения, например, в устройство 122 управления тормозами в качестве управления в целях предотвращения столкновения. Блок 111 управления содействием выдает в ЧМИ (человеко-машинный интерфейс) 123 сигнал дать, например, указание водителю снизить скорость или указание водителю обратить внимание на объект, находящийся рядом с транспортным средством 100, в качестве управления в целях предотвращения столкновения.
[0035] Блок 112 блокирования содействия выполняет блокирующее управление для блокирования управления содействием, выполняемого блоком 111 управления содействием, при условии, что угол поворота управляемых колес, определенный датчиком 102 угла поворота управляемых колес, например, равен заранее заданному углу или больше него, когда блок 101 обнаружения объектов вполне может принять ошибочное решение. Например, в качестве заранее заданного угла указывается угол около 180 градусов. Блок 112 блокирования содействия блокирует содействие, осуществляемое блоком 111 управления содействием, например, посредством передачи блокирующего сигнала, который представляет собой сигнал прекратить управление содействием, выполняемое блоком 111 управления содействием, в блок 111 управления содействием. Авторы изобретения заключили, что когда угол поворота управляемых колес транспортного средства 100 равен заранее заданному углу или больше него, препятствие фактически расположено не по ходу движения транспортного средства, однако блок 101 обнаружения объектов вполне может ошибочно определить наличие препятствия по ходу движения транспортного средства. Соответственно, блок 112 блокирования содействия выполняет блокирующее управление при условии, что угол поворота управляемых колес транспортного средства 100 равен заранее заданному углу или больше него.
[0036] Блок 113 ограничения вмешательства определяет, необходимо ли блокирование управления содействием при предотвращении столкновения, на основе диапазона положений, определенного по результатам определения положения устройства 103 переключения передач. Блок 113 ограничения вмешательства согласно настоящему варианту осуществления изобретения определяет, что блокирование «не является необходимым», до тех пор, пока диапазон положений управления движением и остановкой транспортного средства 100 не переключится из диапазона положений при остановке в диапазон положений при движении, и не пройдет заранее заданное время с момента начала переключения. Блок 113 ограничения вмешательства согласно настоящему варианту осуществления изобретения определяет, что блокирование «не является необходимым», до тех пор, пока диапазон положений управления движением и остановкой транспортного средства 100 не переключится из диапазона положений при остановке в диапазон положений при движении и транспортное средство 100 не проедет заранее заданное расстояние с момента начала переключения. То есть в данном варианте осуществления изобретения непосредственно после переключения из диапазона положений при остановке в диапазон положений при движении, то есть непосредственно после того, как транспортное средство 100 перешло в состояние парковки или остановки, существует высокая вероятность того, что водитель транспортного средства 100 ошибочно нажмет на педаль акселератора или тормоза или ошибочно включит первую передачу или главную передачу или передачу заднего хода механизма переключения передач. Таким образом, в подобных ситуациях, даже когда угол поворота управляемых колес равен заранее заданному углу или больше него, необходимо выполнять управление содействием с помощью блока 111 управления содействием, и поэтому блок 113 ограничения вмешательства ограничивает вмешательство в управление блокированием, выполняемое блоком 112 блокирования содействия. Ограничение вмешательства в управление блокированием в данном варианте осуществления изобретения также включает в себя запрет вмешательства управления блокированием.
[0037] Блок 113 ограничения вмешательства ограничивает вмешательство управления блокированием, выполняемым блоком 112 блокирования содействия. В данном варианте осуществления изобретения на основе переключения передачи из диапазона положений при остановке в диапазон положений при движении, определено, что состояние транспортного средства 100 изменилось из состояния движения в состояние парковки или остановки.
[0038] Когда определено, что блокирование «не является необходимым», блок 113 ограничения вмешательства выдает сигнал игнорировать блокирующий сигнал, направляемый блоком 112 блокирования содействия в блок 111 управления содействием. Соответственно, блок 111 управления содействием игнорирует блокирующий сигнал, и управление блокированием, выполняемое блоком 112 блокирования содействия, ограничивается (запрещается).
[0039] Когда от блока 111 управления содействием поступает сигнал избежать столкновения, устройство 121 управления двигателем выполняет управление, уменьшая обороты двигателя. Соответственно, обороты двигателя уменьшаются независимо от усилия, с которым водитель нажимает на педаль акселератора.
[0040] Когда от блока 111 управления содействием поступает сигнал избежать столкновения, устройство 122 управления тормозами выполняет управление, автоматически заставляя срабатывать тормозное устройство. Поскольку тормозное устройство транспортного средства 100 срабатывает автоматически благодаря применению данного управления, можно избежать столкновения транспортного средства 100 с объектом, находящимся рядом с транспортным средством 100.
[0041] Когда от блока 111 управления содействием поступает сигнал избежать столкновения, ЧМИ 123 при помощи голосового интерфейса или графического дисплея дает указание водителю снизить скорость или указание водителю обратить внимание на объект. Исполняемая процедура, которая выполняется блоком 113 ограничения вмешательства в управление в данном варианте осуществления изобретения, будет описана далее со ссылкой на фиг. 2.
[0042] Как показано на фиг. 2, на этапе S101 определяется, равно ли время, прошедшее после того, как механизм переключения передач транспортного средства 100 был переключен из диапазона положений при остановке в диапазон положений при движении, предельному значению Тα или больше него, или равна ли величина пробега транспортного средства 100, после того как механизм переключения передач транспортного средства 100 был переключен из диапазона положений при остановке в диапазон положений при движении, предельному значению Lα или больше него. Предельные значения Тα и Lα задаются, например, как значения, позволяющие определить, отличается ли скорость движения транспортного средства 100 от очень низкой скорости, которая ниже нескольких км/ч или ниже примерно десяти км/ч.
[0043] На этапе S101 также определяется, равно ли прошедшее время предельному значению Тα или больше него, и равен ли угол поворота управляемых колес транспортного средства 100 заранее заданному предельному значению Dα или больше него, для определения, находится ли угол поворота управляемых колес в диапазоне значений, в котором возможно ошибочное определение.
[0044] Когда определяется, что прошедшее время равно предельному значению Tα или больше него, а угол поворота управляемых колес транспортного средства 100 находится в диапазоне значений ошибочного определения, определяют, что транспортное средство 100 двигается со скоростью, равной очень малой скорости или больше нее, а текущее окружение транспортного средства 100 изменилось и перестало быть тем окружением, которое было при парковке или остановке, и разрешается блокирование содействия при предотвращении столкновения, когда угол поворота управляемых колес равен заранее заданному углу или больше него (этап S102).
[0045] На этапе SI01 также определяется, равна ли величина пробега предельному значению Lα или больше него, и равен ли угол поворота управляемых колес транспортного средства 100 предельному значению Dα или больше него, для определения, остается ли угол поворота управляемых колес в диапазоне значений ошибочного определения.
[0046] Даже когда определено, что величина пробега транспортного средства 100 равна предельному значению Lα или больше него, а угол поворота управляемых колес транспортного средства 100 остается в диапазоне значений ошибочного определения, и определено, что транспортное средство 100 движется со скоростью, равной очень малой скорости или больше нее, и текущее окружение транспортного средства 100 изменилось по отношению к окружению, которое было при парковке или остановке, и разрешается блокирование содействия при предотвращении столкновения, когда угол поворота управляемых колес равен заранее заданному углу или больше него (этап S102).
[0047] С другой стороны, когда угол поворота управляемых колес находится в диапазоне значений, в котором возможно принятие ошибочного решения, однако прошедший период времени меньше предельного значения Та или величина пробега меньше предельного значения Lα, блок 113 ограничения вмешательства ограничивает вмешательство в блокирующее управление, несмотря на то, что блок 112 блокирования содействия определил, что блокирование содействия при предотвращении столкновения является «необходимым». Соответственно, когда блок 111 управления содействием определяет, что содействие при предотвращении столкновения является «необходимым», определяется, что существует большая необходимость выполнения содействия при предотвращении столкновения, и поэтому содействие при предотвращении столкновения выполняется независимо от угла поворота управляемых колес. Функционирование устройства оказания содействия при предотвращении столкновения и способ оказания содействия при предотвращении столкновения, согласно настоящему варианту осуществления изобретения, будут описаны далее со ссылкой на фиг. 3А-3D и фиг. 4.
[0048] Предполагается, что транспортное средство 100 движется на парковочную площадку для парковки или остановки на парковочном месте, как показано на фиг. 3А, и транспортное средство 100 припарковано или остановилось на парковочной площадке, как показано на фиг. 3В. Затем механизм переключения передач транспортного средства 100 переключается из положения главной передачи или первой передачи в положение парковочной передачи или нейтральной передачи. Стена 200 находится спереди по ходу движения транспортного средства 100 на заранее заданном расстоянии от парковочной площадки. Наличие стены 200 обнаруживается, например, блоком 101 обнаружения объектов.
[0049] В этот момент времени угол поворота управляемых колес транспортного средства 100 задается равным заранее заданному углу или больше него, как показано на фиг. 4 (а). Соответственно, как показано с помощью периода времени Т1 на фиг. 4 (b), блок 112 блокирования содействия определяет, что блокирование является «необходимым», и выполняет блокирование содействия при предотвращении столкновения, выполняемого блоком 111 управления содействием.
[0050] Когда транспортное средство 100 начинает движение от парковочной площадки, как показано на фиг. 3С, транспортное средство 100 должно переместиться назад, как указано пунктирной линией, поскольку стена 200 расположена спереди от транспортного средства 100. При этом водитель транспортного средства 100 может ошибочно переключить механизм переключения передач из положения парковочной передачи или нейтральной передачи в положение первой передачи или главной передачи. В этом случае транспортное средство 100 начнет двигаться в сторону стены 200. Таким образом, когда припаркованное или стоящее транспортное средство 100 начинает движение, механизм переключения передач переключается из диапазона положений при остановке в диапазон положений при движении, однако при этом в целом ряде случае водитель может ошибочно переключить механизм переключения передач. То есть, например, даже когда угол поворота управляемых колес транспортного средства 100 равен заранее заданному углу или больше него, существует существенная необходимость избежать столкновения транспортного средства 100 со стеной 200 путем содействия, осуществляемого блоком 111 управления содействием.
[0051] Таким образом, в данном варианте осуществления изобретения, как показано на фиг. 3D, например, после того, как припаркованное или стоящее транспортное средство 100 начинает движение, прежде чем транспортное средство 100 проедет заранее заданное расстояние Lα от центра положения парковки или остановки, или прежде чем пройдет период Тα времени, необходимый для того, чтобы проехать расстояние Lα, блокирующее управление, выполняемое блоком 112 блокирования содействия подавляется (запрещается).
[0052] То есть, как показано на фиг. 4 (с), прежде, чем будет обнаружено, что было пройдено расстояние Lα или что прошел период Тα времени с момента Тα времени, в который механизм переключения передач транспортного средства 100 был переключен из диапазона положений при остановке в диапазон положений при движении, блок 113 ограничения вмешательства ограничивает вмешательство в блокирующее управление, выполняемое блоком 112 блокирования содействия.
[0053] Как следствие, как указано с помощью момента Tb времени на фиг.4 (d), блок 111 управления содействием, определив, что содействие «необходимо», на основе наличия стены 200, выполняет содействие при предотвращении столкновения без его блокирования блоком 112 блокирования содействия. Соответственно, автоматически выполняется управление для снижения оборотов двигателя или управление тормозной системой. Например, при помощи ЧМИ 123 дается указание водителю обратить внимание на приближение к стене 200 или указание выполнить торможение. Как описано выше, можно получить следующие полезные эффекты от применения устройства оказания содействия при предотвращении столкновения и способа оказания содействия при предотвращении столкновения согласно настоящему варианту осуществления изобретения.
[0054] (1) Блок 113 ограничения вмешательства определяет, необходимо ли блокирование, когда угол поворота управляемых колес равен заранее заданному углу или больше него, и ограничивает вмешательство блокирующего управления, выполняемого блоком 112 блокирования содействия, в зависимости от результатов определения. Соответственно, даже когда угол поворота управляемых колес равен заранее заданному углу или больше него, и таким образом блок 112 блокирования содействия определяет, что блокирование содействия «необходимо», управление содействием выполняется в ситуации, когда существует явная необходимость содействия.
[0055] (2) Блок 113 ограничения вмешательства ограничивает вмешательство блокирующего управления при условии, что положение устройства переключения передач, которое управляет движением и остановкой транспортного средства 100, переключено из диапазона положений при остановке в диапазон положений при движении, и что соблюдено, по меньшей мере, одно из следующий условий: условие, согласно которому величина пробега транспортного средства 100 после переключения передачи равна заранее заданному расстоянию Lα или больше него, и условие, согласно которому время, прошедшее после переключения передачи, равно заранее заданному Тα времени или больше него. Соответственно, когда выбирается ошибочный диапазон положений при движении в момент начала движения припаркованного или стоящего транспортного средства 100, выполняется содействие, осуществляемое блоком 111 управления содействием, и благодаря этому блокируется движение транспортного средства 100, вызванное ошибочным действием в диапазоне положений при движении.
[0056] (3) Переключение механизма переключения передач транспортного средства 100 из положения парковочной передачи или нейтральной передачи в одно из следующих положений: первая передача, главная передача и передача заднего хода, - описывается как переключение из диапазона положений при остановке в диапазон положений при движении. Соответственно, даже когда переключение из положения парковочной передачи или нейтральной передачи выполняется по ошибке в одно из следующих положений: первая передача, главная передача и передача заднего хода, выполняется содействие для предотвращения столкновения транспортного средства 100 с объектом из-за ошибочного действия. Соответственно, предотвращается столкновение транспортного средства 100 с объектом в результате ошибочного переключения, когда угол поворота управляемых колес равен заранее заданному углу или больше него.
Второй вариант осуществления изобретения
[0057] Устройство оказания содействия при предотвращении столкновения и способ оказания содействия при предотвращении столкновения согласно второму варианту осуществления настоящего изобретения будут описаны далее со ссылкой на фиг. 5-8, при этом основное внимание уделено отличиям от первого варианта осуществления изобретения. Устройство оказания содействия при предотвращении столкновения и способ оказания содействия при предотвращении столкновения согласно настоящему варианту осуществления изобретения имеют такую же базовую конфигурацию, что и в первом варианте осуществления изобретения, а элементы, в целом идентичные элементам первого варианта осуществления изобретения, будут обозначаться при помощи тех же самых ссылочных позиций на фиг. 5-8 без повторения их описания.
[0058] Как показано на фиг. 5, транспортное средство 100 в данном варианте осуществления изобретения включает в себя электрический стояночный тормоз 104, который электрически переключается между положениями стояночного тормоза ВКЛЮЧЕН и ВЫКЛЮЧЕН. Электрический стояночный тормоз 104 переключается между положениями стояночного тормоза ВКЛЮЧЕН и ВЫКЛЮЧЕН, например, посредством нажатия кнопочного переключателя. Электрический стояночный тормоз 104 переключается из положения ВКЛЮЧЕН в положение ВЫКЛЮЧЕН при помощи нажатия на педаль акселератора с заранее заданным или большим усилием, когда стояночный тормоз находится в положении ВКЛЮЧЕН. Блок 113 ограничения вмешательства, согласно настоящему варианту осуществления изобретения, определяет начало движения транспортного средства 100 на основе положения ВКЛЮЧЕН/ВЫКЛЮЧЕН электрического стояночного тормоза 104 и ограничивает вмешательство в управление в виде блокирования управления, выполняемого блоком 112 блокирования содействия, на основе результатов определения.
[0059] Как показано на этапе S111 на фиг. 6, в данном варианте осуществления изобретения, когда электрический стояночный тормоз 104, который находился в положении ВКЛЮЧЕН, переключается из положения ВКЛЮЧЕН в положение ВЫКЛЮЧЕН водителем путем выполнения действия переключения или нажатия на педаль акселератора или выполнения подобного действия, вычисляется прошедшее время или величина пробега транспортного средства 100 после переключения. Затем определяется, является ли время, прошедшее после переключения, равным предельному значению Тα или больше него, а угол поворота управляемых колес транспортного средства 100 равным предельному значению Dα или больше него. Также определяется, равна ли величина пробега после переключения предельному значению Lα или больше него и равен ли угол поворота управляемых колес транспортного средства 100 предельному значению Dα или больше него.
[0060] Когда определяется, что время, прошедшее после переключения, равно предельному значению Тα или больше него, а угол поворота транспортного средства 100 равен предельному значению Dα или больше него (ДА на этапе S111), блок 113 ограничения вмешательства не ограничивает вмешательство блокирующего управления, выполняемого блоком 112 блокирования содействия (этап S112). Аналогичным образом, когда определяется, что величина пробега после переключения равна предельному значению Lα или больше него, а угол поворота управляемых колес транспортного средства 100 равен предельному значению Dα или больше него (ДА на этапе S111), блок 113 ограничения вмешательства не ограничивает вмешательство блокирующего управления, выполняемого блоком 112 блокирования содействия (этап S112).
[0061] С другой стороны, когда угол поворота управляемых колес равен предельному значению Dα или больше него, однако время, прошедшее после переключения электрического стояночного тормоза 104, меньше предельного значения Тα (НЕТ на этапе S111), блок 113 ограничения вмешательства ограничивает вмешательство блокирующего управления, выполняемого блоком 112 блокирования содействия.
[0062] Когда угол поворота управляемых колес равен предельному значению Dα или больше него, однако величина пробега транспортного средства 100 после переключения электрического стояночного тормоза 104, меньше предельного значения Lα (НЕТ на этапе S111), блок 113 ограничения вмешательства ограничивает вмешательство блокирующего управления, выполняемого блоком 112 блокирования содействия.
[0063] Как показано на фиг. 7 в качестве одного из примеров ситуации, в которой применяются устройство оказания содействия при предотвращении столкновения и способ оказания содействия при предотвращении столкновения согласно настоящему варианту осуществления изобретения, например, когда угол поворота управляемых колес равен заранее заданному углу или больше него в точке Ра, электрический стояночный тормоз 104, который находился в положении ВКЛЮЧЕН, переключается из положения ВКЛЮЧЕН в положение ВЫКЛЮЧЕН, и транспортное средство 100 двигается из точки Ра в точку Pb, отстоящую на предельное расстояние Lα от точки Ра.
[0064] В данном случае, когда угол поворота управляемых колес равен заранее заданному значению или больше него в момент остановки транспортного средства 100, как показано на фиг. 8(a), блок 112 блокирования содействия выполняет управление для блокирования содействия при предотвращении столкновения, как показано при помощи момента времени t1 на фиг. 8(b). В момент времени t2 транспортное средство 100 останавливается, а электрический стояночный тормоз 104 переключается из положения ВЫКЛЮЧЕН в положение ВКЛЮЧЕН.
[0065] Далее, когда электрический стояночный тормоз 104 переключается из положения ВКЛЮЧЕН в положение ВЫКЛЮЧЕН в момент t3 времени для того, чтобы транспортное средство 100 начало свое движение, выполняется условие, согласно которому угол поворота управляемых колес равен предельному значению Dα или больше него и электрический стояночный тормоз 104 переключен из положения ВКЛЮЧЕН в положение ВЫКЛЮЧЕН (фиг. 8(c)).
[0066] Таким образом, блок 113 ограничения вмешательства ограничивает вмешательство в виде блокирования работы блока 112 блокирования содействия, при этом прекращается состояние, в котором блокируется содействие при предотвращении столкновения (фиг. 8(b)). Например, прежде чем наступит момент t4 времени, в который истекает заранее заданный период Тα времени после момента t3, ограничивается вмешательство в виде блокирования работы блока 112 блокирования содействия. В качестве другого варианта, как показано на фиг. 7, прежде чем транспортное средство 100 достигнет точки Pb, которая находится на заранее заданном расстоянии Lα от точки Ра, в которой транспортное средство 100 начинает движение, ограничивается вмешательство в виде блокирования работы блока 112 блокирования содействия.
[0067] Например, даже когда блок 111 управления содействием определяет, что содействие «необходимо» в период Тα времени, однако блок 112 блокирования содействия определяет, что блокирование «необходимо», выполняется содействие, осуществляемое блоком 111 управления содействием. Аналогичным образом, например, даже когда блок 111 управления содействием определяет, что содействие «необходимо» прежде, чем транспортное средство 100 проедет заранее заданное расстояние Lα после того, как транспортное средство 100 начало движение, однако блок 112 блокирования содействия определяет, что блокирование «необходимо», выполняется поддержка содействие, осуществляемое блоком 111 управления содействием. Как описано выше, достигается нижеописанный полезный эффект вместо полезного эффекта, описанного выше в пункте (3), в результате применения устройства оказания содействия при предотвращении столкновения и способа оказания содействия при предотвращении столкновения согласно настоящему варианту осуществления изобретения.
[0068] (3А) Прекращение парковки или стоянки транспортного средства 100 определяется на основе положения ВКЛЮЧЕН/ВЫКЛЮЧЕН электрического стояночного тормоза 104. Блок 113 ограничения вмешательства ограничивает блокирование содействия при предотвращении столкновения на основе результатов определения. Соответственно, необходимое регулирование содействия при предотвращении столкновения выполняется даже в транспортном средстве 100, оснащенном электрическим стояночным тормозом 104. Как следствие, даже когда электрический стояночный тормоз 104 выключен в результате нажатия на педаль акселератора или выполнения подобного действия, обеспечивается выполнение содействия при предотвращении столкновения в ситуации, когда это очень необходимо.
Третий вариант осуществления изобретения
[0069] Устройство оказания содействия при предотвращении столкновения и способ оказания содействия при предотвращении столкновения согласно третьему варианту осуществления настоящего изобретения будут описаны далее со ссылкой на фиг. 9, при этом основное внимание уделено отличиям от первого варианта осуществления изобретения. Устройство оказания содействия при предотвращении столкновения и способ оказания содействия при предотвращении столкновения согласно настоящему варианту осуществления изобретения имеют такую же базовую конфигурацию, что и в первом варианте осуществления изобретения, а элементы, в целом идентичные элементам первого варианта осуществления изобретения, будут обозначаться при помощи тех же самых ссылочных позиций на фиг. 9, без повторения их описания.
[0070] Как показано на фиг. 9, в данном варианте осуществления изобретения, когда выполнено условие этапа S101 на фиг. 2, определяется, равен ли угол поворота управляемых колес транспортного средства 100 предельному значению Dα или больше него, и находится ли объект, такой как препятствие, в пределах заранее заданного расстояния (предельное значение Wα) относительно положения транспортного средства 100 (этап S101A). В качестве предельного значения Wα задается значение, обозначающее расстояние, которое меньше предельного значения, когда блок 111 управления содействием выполняет содействие при предотвращении столкновения.
[0071] Когда определяется, что объект находится в пределах заранее заданного расстояния относительно транспортного средства 100 (ДА на этапе S101) и, например, даже когда выполнено условие этапа S101, ограничивается блокирование содействия при предотвращении столкновения, выполняемое блоком 112 блокирования содействия. То есть, когда блок 112 блокирования содействия определяет, что содействие «необходимо», выполняется содействие для предотвращения приближения транспортного средства 100 к объекту.
[0072] С другой стороны, когда на этапе S101A принимается решение, что угол поворота управляемых колес транспортного средства 100 равен предельному значению Dα или больше него, а объект, такой как препятствие, отсутствует в пределах заранее заданного расстояния (предельное значение Wα) от положения транспортного средства 100 (ДА на этапе S101A), разрешено блокирование содействия при предотвращении столкновения, выполняемое блоком 112 блокирования содействия. Описанным выше образом может быть дополнительно получен нижеуказанный полезный эффект в результате применения устройства оказания содействия при предотвращении столкновения и способа оказания содействия при предотвращении столкновения, согласно настоящему варианту осуществления изобретения.
[0073] (4) Даже когда объект находится в пределах заранее заданного расстояния от транспортного средства 100, блокирование содействия при предотвращении столкновения, выполняемое блоком 112 блокирования содействия, также ограничено. Соответственно, когда объект находится в пределах заранее заданного расстояния от транспортного средства 100, выполнение содействия при предотвращении столкновения активизируется независимо от ситуации, в которой угол поворота управляемых колес равен заранее заданному углу или больше него. Соответственно, исключается приближение к объекту, находящемуся рядом с транспортным средством 100. Когда объект находится не спереди по ходу движения транспортного средства 100, однако объект находится в пределах заранее заданного расстояния от транспортного средства 100, водитель испытывает меньший дискомфорт в результате выполнения содействия при предотвращении столкновения. Таким образом, это позволяет снизить чувство дискомфорта у водителя и обеспечить содействие при предотвращении столкновения.
Четвертый вариант осуществления изобретения
[0074] Устройство оказания содействия при предотвращении столкновения и способ оказания содействия при предотвращении столкновения согласно четвертому варианту осуществления настоящего изобретения будут описаны далее со ссылкой на фиг. 10, при этом основное внимание уделено отличиям от первого варианта осуществления изобретения. Устройство оказания содействия при предотвращении столкновения и способ оказания содействия при предотвращении столкновения согласно настоящему варианту осуществления изобретения имеют такую же базовую конфигурацию, что и в первом варианте осуществления изобретения, и элементы, в целом идентичные элементам первого варианта осуществления изобретения, будут обозначаться при помощи тех же самых ссылочных позиций на фиг. 10, без повторения их описания.
[0075] Как показано на фиг. 10, в данном варианте осуществления изобретения, на этапе S121 определяется, равно ли время, прошедшее после переключения ключа зажигания из положения ВЫКЛЮЧЕНО в положение ВКЛЮЧЕНО, предельному значению Тα или больше него, или равна ли величина пробега транспортного средства 100 после переключения ключа зажигания из положения ВЫКЛЮЧЕНО в положение ВКЛЮЧЕНО предельному значению Lα или больше него.
[0076] Также на этапе S121 определяется, равен ли прошедший период времени предельному значению Тα или больше него и равен ли угол поворота управляемых колес транспортного средства 100 заранее заданному предельному значению Dα или больше него, для определения, находился ли угол поворота управляемых колес в диапазоне значений ошибочного определения.
[0077] Когда определяется, что прошедший период времени равен предельному значению Тα или больше него, а угол поворота управляемых колес транспортного средства 100 находится в диапазоне значений ошибочного определения, определяется, что транспортное средство 100 движется со скоростью, которая равна очень низкой скорости или больше нее, а текущее окружение транспортного средства 100 изменилось в сравнении с окружением парковки или остановки, и разрешается блокирование содействия при предотвращении столкновения, когда угол поворота управляемых колес равен заранее заданному углу или больше него (этап S122).
[0078] Также на этапе S121 определяется, равна ли величина пробега предельному значению Lα или больше него, и равен ли угол поворота управляемых колес транспортного средства 100 заранее заданному предельному значению Dα или больше него, для определения, находился ли угол поворота управляемых колес в диапазоне значений ошибочного определения.
[0079] Когда определяется, что величина пробега транспортного средства 100 равна предельному значению Lα или больше него, а угол поворота управляемых колес транспортного средства 100 находится в диапазоне значений ошибочного определения, определяется, что транспортное средство 100 движется со скоростью, которая равна очень низкой скорости или больше нее, а текущее окружение транспортного средства 100 изменилось и перестало быть окружением парковки или остановки, и разрешается блокирование поддержки управления в целях предотвращения столкновения, когда угол поворота управляемых колес равен заранее заданному углу или больше него (этап S122).
[0080] С другой стороны, даже когда угол поворота управляемых колес находится в диапазоне значений ошибочного определения, однако прошедший период времени меньше предельного значения Тα или величина пробега меньше предельного значения Lα, и блок 112 блокирования содействия определяет, что блокирование содействия при предотвращении столкновения является «необходимым», блок 113 ограничения вмешательства ограничивает вмешательство блокирующего управления. Соответственно, когда блок 111 управления содействием определяет, что содействие при предотвращении столкновения является «необходимым», определяется, что существует явная необходимость выполнения содействия при предотвращении столкновения независимо от угла поворота управляемых колес, и поэтому содействие при предотвращении столкновения выполняется. Описанным выше образом достигается нижеуказанный полезный эффект вместо полезного эффекта, описанного выше в пункте (3), в результате применения устройства оказания содействия при предотвращении столкновения и способа оказания содействия при предотвращении столкновения согласно настоящему варианту осуществления изобретения.
[0081] (3В) Прекращение парковки или стоянки транспортного средства определяется на основе положения ВКЛЮЧЕН/ВЫКЛЮЧЕН ключа зажигания транспортного средства 100. Блок 113 ограничения вмешательства ограничивает блокирование содействия при предотвращении столкновения на основе результатов определения. Соответственно, можно определить, необходимо ли блокирование содействия при предотвращении столкновения, на основе положения ВКЛЮЧЕН/ВЫКЛЮЧЕН ключа зажигания транспортного средства 100, то есть на основе начала движения припаркованного или стоящего транспортного средства 100.
Пятый вариант осуществления изобретения
[0082] Устройство оказания содействия при предотвращении столкновения и способ оказания содействия при предотвращении столкновения согласно пятому варианту осуществления изобретения будут описаны далее со ссылкой на фиг. 11, при этом основное внимание уделено отличиям от первого варианта осуществления изобретения. Устройство оказания содействия при предотвращении столкновения и способ оказания содействия при предотвращении столкновения согласно настоящему варианту осуществления изобретения имеют такую же базовую конфигурацию, что и в первом варианте осуществления изобретения, а элементы, в целом идентичные элементам первого варианта осуществления изобретения, будут обозначаться при помощи тех же самых ссылочных позиций на фиг. 11, без повторения их описания.
[0083] В случае применения устройства оказания содействия при предотвращении столкновения и способа оказания содействия при предотвращении столкновения согласно настоящему варианту осуществления изобретения, определяется, является ли необходимым блокирование содействия при предотвращении столкновения в диапазоне значений очень низких скоростей с учетом частоты, с которой водитель выполняет ошибочные действия, когда скорость движения транспортного средства 100 находится в диапазоне значений очень низких скоростей.
[0084] Как показано на фиг. 11, в данном варианте осуществления изобретения на этапе S131 определяется, вышла ли скорость движения транспортного средства 100 за пределы диапазона значений очень низких скоростей в качестве заранее заданного диапазона скоростей, и равен ли угол поворота управляемых колес предельному значению Dα или больше него. Нахождение скорости движения в диапазоне значений очень низких скоростей определяется, например, на основании того, что скорость движения транспортного средства 100 меньше 10 км/ч или подобного значения.
[0085] Когда скорость движения транспортного средства 100 выходит за пределы диапазона значений очень низких скоростей, а угол поворота управляемых колес транспортного средства 100 находится в диапазоне значений, ошибочного определения, определяется, что транспортное средство 100 двигается со скоростью, равной очень малой скорости или больше нее, а текущее окружение транспортного средства 100 изменилось в сравнении с окружением парковки или остановки, и поэтому разрешается блокирование содействия при предотвращении столкновения, когда угол поворота управляемых колес равен заранее заданному углу или больше него (этап S132).
[0086] С другой стороны, даже когда угол поворота управляемых колес находится в диапазоне значений ошибочного определения, однако скорость движения транспортного средства 100 находится в диапазоне очень низких скоростей, а блок 112 блокирования содействия определяет, что блокирование содействия при предотвращении столкновения является «необходимым», блок 113 ограничения вмешательства ограничивает вмешательство блокирующего управления. Соответственно, когда блок 111 управления содействием определяет, что содействие при предотвращении столкновения является «необходимым», определяется, что существует явная необходимость выполнения содействия при предотвращении столкновения независимо от угла поворота управляемых колес, и поэтому содействие при предотвращении столкновения выполняется. Описанным выше образом достигается нижеуказанный полезный эффект вместо полезного эффекта, описанного выше в пункте (3), в результате применения устройства оказания содействия при предотвращении столкновения и способа оказания содействия при предотвращении столкновения согласно настоящему варианту осуществления изобретения.
[0087] (3D) В зависимости от того, находится ли скорость движения транспортного средства 100 в диапазоне значений очень низких скоростей, определяется, необходимо ли блокирование содействия при предотвращении столкновения. Соответственно, можно обеспечить содействие при предотвращении столкновения в ситуации, когда частота, с которой водитель выполняет ошибочные действия, является высокой. Блок 113 ограничения вмешательства может определить, необходимо ли блокирование содействия при предотвращении столкновения, только при помощи отслеживания скорости движения и угла поворота управляемых колес транспортного средства 100. Соответственно, нет необходимости измерять заранее заданное время или заранее заданное расстояние, что позволяет снизить вычислительную нагрузку на блок 112 блокирования содействия.
Другие варианты осуществления изобретения
Вышеперечисленные варианты осуществления изобретения могут быть реализованы в следующих формах.
[0088] В четвертом варианте осуществления изобретения, как показано на фиг. 12, которая соответствует фиг. 10, блок 113 ограничения вмешательства может определить, необходимо ли блокирование содействия при предотвращении столкновения, учитывая также расстояние до объекта, расположенного рядом с транспортным средством 100.
[0089] В вариантах осуществления изобретения с первого по четвертый прежде, чем завершится заранее заданный период времени, или прежде чем транспортное средство 100 пройдет заранее заданную величину пробега, блок 113 ограничения вмешательства ограничивает вмешательство в блокирование содействия при предотвращении столкновения. Блок 113 ограничения вмешательства может ограничивать вмешательство в содействие при предотвращении столкновения, прежде чем истечет заранее заданный период времени и транспортное средство 100 пройдет заранее заданную величину пробега.
[0090] Во втором, четвертом и пятом вариантах осуществления изобретения, как и в третьем варианте осуществления изобретения, блок 113 ограничения вмешательства может ограничивать вмешательство в блокирование содействия при предотвращении столкновения с учетом расстояния между объектом, находящимся рядом с транспортным средством 100, и транспортным средством 100.
[0091] В дополнение к вышеперечисленным вариантам осуществления изобретения, блок 113 ограничения вмешательства может ограничивать вмешательство в виде блокирования содействия при предотвращении столкновения при условии, что обнаружено, по меньшей мере, одно из следующих действий: снятие со стояночного тормоза, пристегивание ремня безопасности или включение в положение для привода вспомогательных агрегатов. Благодаря применению этой конфигурации достигаются полезные эффекты, аналогичные полезным эффектам, которые описаны в пунктах с (1) по (3). Блок 113 ограничения вмешательства может не ограничивать вмешательство в виде блокирования содействия при предотвращении столкновения при условии, что прошло заранее заданное время после обнаружения по меньшей мере одного из следующих действий: снятие со стояночного тормоза, пристегивание ремня безопасности или включение в положение для привода вспомогательных агрегатов. Аналогичным образом, блок 113 ограничения вмешательства может не ограничивать вмешательство в виде блокирования содействия при предотвращении столкновения, при условии, что транспортное средство 100 проехало заранее заданное расстояние после обнаружения, по меньшей мере, одного из следующих действий: снятие со стояночного тормоза, пристегивание ремня безопасности и включение в положение для привода вспомогательных агрегатов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОМОЩИ ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ | 2020 |
|
RU2737180C1 |
| Способ предотвращения столкновений со встречным препятствием на полосе движения | 2022 |
|
RU2788652C1 |
| УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ | 2016 |
|
RU2654839C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2021 |
|
RU2753082C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ С ПРЕПЯТСТВИЯМИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2335805C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2021 |
|
RU2754021C1 |
| УСТРОЙСТВО ПОМОЩИ В ПРЕДОТВРАЩЕНИИ СТОЛКНОВЕНИЙ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2666071C2 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ЕЕ ЭКСПЛУАТАЦИИ | 2014 |
|
RU2665208C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2021 |
|
RU2754470C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2021 |
|
RU2755428C1 |
Изобретение относится к системам помощи при вождении транспортного средства. Устройство оказания содействия при предотвращении столкновения содержит блок управления содействием, блок блокирования содействия и блок ограничения вмешательства. Блок блокирования содействия блокирует содействие вождению, когда угол поворота управляемых колес транспортного средства равен заранее заданному углу или больше него. Блок ограничения вмешательства сконфигурирован для определения, необходимо ли блокирование содействия основе величины пробега транспортного средства после обнаружения по меньшей мере одного из следующих действий положение устройства переключения передач переключено из диапазона положений при остановке в диапазон положений при движении, освобождение стояночного тормоза, пристегивание ремня безопасности, включение замка зажигания, включение в положение для привода вспомогательных агрегатов. Блок ограничения вмешательства сконфигурирован для ограничения вмешательства в виде блокирования содействия, в случае если величина пробега меньше, чем заранее заданное расстояние. Достигается повышение безопасности управления транспортным средством. 2 н. и 11 з.п. ф-лы, 15 ил.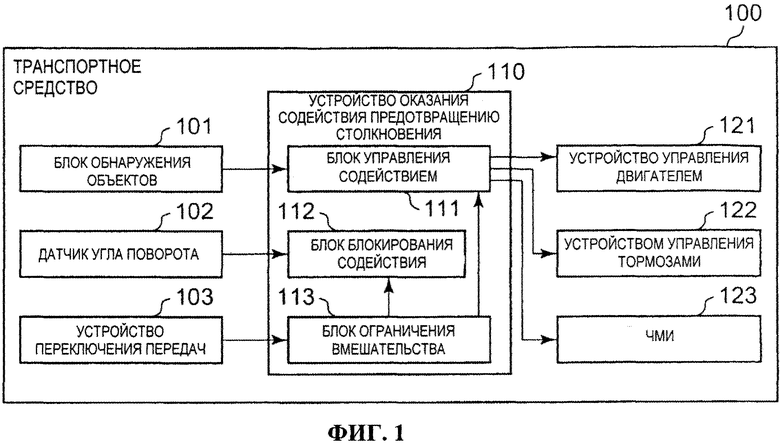
1. Устройство оказания содействия при предотвращении столкновения, которое оказывает содействие при предотвращении столкновения транспортного средства с объектом, содержащее:
блок управления содействием, сконфигурированный для выполнения управления содействием при предотвращении столкновения;
блок блокирования содействия, сконфигурированный для блокирования содействия, осуществляемого блоком управления содействием, когда угол поворота управляемых колес транспортного средства равен заранее заданному углу или больше него; и
блок ограничения вмешательства, сконфигурированный для определения, необходимо ли блокирование содействия, осуществляемое блоком блокирования содействия, когда угол поворота управляемых колес равен заранее заданному углу или больше него, на основе величины пробега транспортного средства после обнаружения по меньшей мере одного из следующих действий:
(i) положение устройства переключения передач переключено из диапазона положений при остановке в диапазон положений при движении,
(ii) освобождение стояночного тормоза,
(iii) пристегивание ремня безопасности,
(iv) включение замка зажигания,
(v) включение в положение для привода вспомогательных агрегатов,
и при этом блок ограничения вмешательства сконфигурирован для ограничения вмешательства в виде блокирования содействия, осуществляемого блоком блокирования содействия, в зависимости от выполнения следующего условия:
величина пробега меньше, чем заранее заданное расстояние, которое представляет собой расстояние, позволяющее определить, отличается ли скорость движения транспортного средства от очень низкой скорости, которая является скоростью, с которой транспортное средство движется в окружении парковки или остановки.
2. Устройство оказания содействия при предотвращении столкновения по п. 1, в котором блок ограничения вмешательства ограничивает вмешательство в виде блокирования содействия, осуществляемого блоком блокирования содействия, когда положение устройства переключения передач, которое управляет движением и остановкой транспортного средства, переключено из диапазона положений при остановке в диапазон положений при движении.
3. Устройство оказания содействия при предотвращении столкновения по п. 1, в котором блок ограничения вмешательства не ограничивает вмешательство в управление блока блокирования содействия при условии, что положение устройства переключения передач, которое управляет движением и остановкой транспортного средства, переключено из диапазона положений при остановке в диапазон положений при движении, и выполнено по меньшей мере одно из следующих условий: условие, согласно которому величина пробега транспортного средства после переключения передачи равна заранее заданному расстоянию или больше него, и условие, согласно которому время, прошедшее после переключения передачи, равно заранее заданному времени или больше него.
4. Устройство оказания содействия при предотвращении столкновения по п. 1, в котором блок ограничения вмешательства не ограничивает вмешательство в управление блока блокирования содействия при условии, что положение устройства переключения передач, которое управляет движением и остановкой транспортного средства, переключено из диапазона положений при остановке в диапазон положений при движении, и соблюдено по меньшей мере одно из следующих условий: условие, согласно которому величина пробега транспортного средства после переключения передачи равна заранее заданному расстоянию или больше него, условие, согласно которому время, прошедшее после переключения передачи, равно заранее заданному времени или больше него, и условие, согласно которому скорость движения транспортного средства равна заранее заданной скорости или больше нее.
5. Устройство оказания содействия при предотвращении столкновения по любому из пп. 2-4, в котором переключение из диапазона положений при остановке в диапазон положений при движении представляет собой переключение из положения парковочной передачи или нейтральной передачи в одно из следующих положений: первая передача, главная передача и передача заднего хода в устройстве переключения передач транспортного средства.
6. Устройство оказания содействия при предотвращении столкновения по п. 1, в котором стояночный тормоз транспортного средства представляет собой электрический стояночный тормоз, который электрически переключается между двумя положениями: ВКЛЮЧЕН и ВЫКЛЮЧЕН, а блок ограничения вмешательства не ограничивает вмешательство в виде блокирования содействия, осуществляемого блоком блокирования поддержки управления, когда электрический стояночный тормоз переключен из положения ВКЛЮЧЕН в положение ВЫКЛЮЧЕН.
7. Устройство оказания содействия при предотвращении столкновения по любому из пп. 2-4, в котором стояночный тормоз транспортного средства представляет собой электрический стояночный тормоз, который электрически переключается между двумя положениями: ВКЛЮЧЕН и ВЫКЛЮЧЕН, и переключение из диапазона положений при остановке в диапазон положений при движении представляет собой переключение электрического стояночного тормоза из положения ВКЛЮЧЕН в положение ВЫКЛЮЧЕН.
8. Устройство оказания содействия при предотвращении столкновения по любому из пп. 1-4, 6, в котором блок ограничения вмешательства ограничивает вмешательство в виде блокирования содействия, осуществляемого блоком блокирования содействия, когда обнаружен объект, находящийся в пределах заранее заданного расстояния от транспортного средства.
9. Устройство оказания содействия при предотвращении столкновения по любому из пп. 1-4, 6, в котором блок ограничения вмешательства не ограничивает вмешательство в виде блокирования содействия, осуществляемого блоком блокирования содействия, при условии, что соблюдено по меньшей мере одно из следующих условий: условие, согласно которому прошло заранее заданное время, после того как припаркованное или стоящее транспортное средство начало движение, и условие, согласно которому транспортное средство проехало заранее заданное расстояние после начала движения транспортного средства.
10. Устройство оказания содействия при предотвращении столкновения по любому из пп. 1-4, 6, в котором блок ограничения вмешательства ограничивает вмешательство в виде блокирования содействия, осуществляемого блоком блокирования содействия, при условии, что соблюдено по меньшей мере одно из следующих условий: условие, согласно которому обнаружено по меньшей мере одно из следующих действий: освобождение стояночного тормоза, пристегивание ремня безопасности, включение замка зажигания и включение в положение для привода вспомогательных агрегатов, и условие, согласно которому скорость движения транспортного средства находится в заранее заданном диапазоне значений скорости и блок ограничения вмешательства не ограничивает вмешательство в виде блокирования содействия, осуществляемого блоком блокирования содействия, при условии, что соблюдено по меньшей мере одно из следующих условий: условие, согласно которому прошло заранее заданное время после обнаружения по меньшей мере одного из следующих действий: освобождение стояночного тормоза, пристегивание ремня безопасности, включение замка зажигания и включение в положение для привода вспомогательных агрегатов, и условие, согласно которому величина пробега транспортного средства равна заранее заданному расстоянию или больше него после обнаружения по меньшей мере одного из следующих действий: освобождение стояночного тормоза, пристегивание ремня безопасности, включение замка зажигания и включение в положение для привода вспомогательных агрегатов.
11. Устройство оказания содействия при предотвращении столкновения по п. 1, в котором блок ограничения вмешательства не ограничивает вмешательство в виде блокирования содействия, осуществляемого блоком блокирования содействия, при условии, что соблюдено по меньшей мере одно из следующих условий: условие, согласно которому прошло заранее заданное время после переключения ключа зажигания из положения ВЫКЛЮЧЕНО в положение ВКЛЮЧЕНО, и условие, согласно которому транспортное средство проехало заранее заданное расстояние после переключения ключа зажигания из положения ВЫКЛЮЧЕНО в положение ВКЛЮЧЕНО.
12. Устройство оказания содействия при предотвращении столкновения по п. 1, в котором блок ограничения вмешательства не ограничивает вмешательство в виде блокирования содействия, осуществляемого блоком блокирования содействия, при условии, что скорость движения транспортного средства равна заранее заданной скорости движения или больше нее.
13. Способ оказания содействия при предотвращении столкновения для содействия предотвращению столкновения транспортного средства с объектом, включающий в себя:
выполнение управления содействием при предотвращении столкновения;
блокирование содействия, когда угол поворота управляемых колес транспортного средства равен заранее заданному углу или больше него; и
определение, необходимо ли блокирование содействия при блокировании управления содействием, когда угол поворота управляемых колес равен заранее заданному углу или больше него, на основе величины пробега транспортного средства после обнаружения по меньшей мере одного из следующих действий:
(i) положение устройства переключения передач переключено из диапазона положений при остановке в диапазон положений при движении,
(ii) освобождение стояночного тормоза,
(iii) пристегивание ремня безопасности,
(iv) включение замка зажигания,
(v) включение в положение для привода вспомогательных агрегатов,
и при этом блок ограничения вмешательства сконфигурирован для ограничения вмешательства в виде блокирования содействия, осуществляемого блоком блокирования содействия, в зависимости от выполнения следующего условия:
величина пробега меньше, чем заранее заданное расстояние, которое представляет собой расстояние, позволяющее определить, отличается ли скорость движения транспортного средства от очень низкой скорости, которая является скоростью, с которой транспортное средство движется в окружении парковки или остановки.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕНЕНИЯ ВОСПРИЯТИЯ РУЛЕВОГО УПРАВЛЕНИЯ В МЕХАНИЗМЕ РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА, А ТАКЖЕ ТРАНСПОРТНОЕ СРЕДСТВО, СОДЕРЖАЩЕЕ ТАКОЕ УСТРОЙСТВО | 2010 |
|
RU2490155C2 |
| WO 2011075392 A1, 23.06.2011. | |||

