Изобретение относится к автомобилестроению, в частности, к способам повышения активной безопасности транспортных средств и может быть использовано в бортовой системе автоматического экстренного торможения (САЭТ).
Известен способ управления системой помощи водителю для транспортного средства, движущегося по дороге в котором определяют узкие участки дорог, прогнозируют траекторию встречных препятствий, определяют возможность разъезда со встречным препятствием и, в случае, если нет возможности разъезда, производится автоматическое торможение перед встречным препятствием (см. патент США US9308916 B2, заявители Robert Bosch GmbH, опубл. 12.04.2016).
Основным недостатком способа является его ограниченная применимость только для случаев автоматического торможения перед встречным препятствием в виде ТС в узких участках дорог и отсутствие учета коэффициента сцепления с опорной поверхностью.
Известны устройство и способ помощи при предотвращении столкновений транспортных средств, в котором определяют направление приближения встречного транспортного средства при повороте налево или направо, определяют точку вероятного столкновения, определяют точку, в которой транспортное средство должно произвести торможение для предотвращения возможного столкновения и при пересечении данной точки осуществляют автоматическое торможение (см. патент США US9815461 B2, заявители HONDA MOTOR CO., LTD., опубл. 14.11.2017).
Основным недостатком способа и устройства для его осуществления является ограниченность применения только для маневров поворотов и отсутствие учета коэффициента сцепления с опорной поверхностью.
Наиболее близким по технической сущности является устройство управления транспортным средством. В рассматриваемом изобретении производится сбор информации об относительной скорости между собственным управляемым ТС и встречным препятствием в виде ТС, расстоянии до него и величине перекрытия габаритов. Далее, рассчитывается время до возможного столкновения и в соответствии с ним осуществляется автоматическое управление торможением или курсом (см. патент Японии JP2020199962 A, заявители Subaru Corp, опубл. 17.12.2020).
Недостатком устройства является отсутствие учета величины сцепления с опорной поверхностью, что критично при выполнении таких маневров как торможение и объезд препятствия.
Техническая задача, на решение которой направлено предлагаемое изобретение, состоит в предотвращении столкновений со встречными транспортными средствами на полосе движения управляемого ТС.
Поставленная техническая задача решается тем, что способ предотвращения столкновений управляемого ТС со встречным препятствием в виде ТС путем измерения скоростей движения и дистанции между встречно движущимися ТС на одной полосе движения, отличающейся тем, что измеряют дистанцию до встречного ТС, например по данным устройств технического зрения (УТЗ), таких как радар или стереокамера, по этой дистанции и углу поворота управляемых колес определяют положение встречного ТС на прогнозируемой траектории движения управляемого ТС, по производной расстояния до встречного ТС определяют знак и величину скорости встречного ТС, вычисляют значение тормозного замедления, достаточного для полной остановки встречных ТС на заданной дистанции, в случае превышения порогового уровня замедления формируют предупреждения водителю и сигналы световой и звуковой аварийной сигнализации участникам движения о возникновении критической предаварийной ситуации, одновременно задают управляющее воздействие на тормозную систему, соответствующее вычисленному тормозному замедлению, ограниченному максимальным значением, определяемым условиями предотвращения блокирования колес на дорожном покрытии, предельные коэффициенты сцепления колес с дорожным покрытием на котором идентифицируют в реальном времени, резервирование данных измерения дистанции, получаемых от УТЗ, на временном интервале торможения выполняют путем интегрирования оценок скорости сближения, причем для прочих ТС, которые находятся в расчетной зоне и не оснащены САЭТ данного типа, включение аварийной сигнализации выполняют по аварийному сигналу для информирования о необходимости быстрой активации торможения с наибольшим возможным замедлением.
Также поставленная техническая задача решается тем, что в известном способе предотвращения столкновения со встречным препятствием в виде ТС на полосе движения известными способами измеряют продольную скорость центра масс, угол поворота управляемых колес и дистанцию до препятствия в передней полусфере, после чего в блоке обработки информации и управления определяют прогнозируемую полосу движения управляемого ТС, положение препятствия на ней, по производной дистанции сближения и собственной скорости определяют скорость встречного ТС и вычисляют величину замедления, достаточного для полной остановки без столкновения каждого из двух встречно движущихся ТС, в случае превышения порогового уровня замедления формируют световой и звуковой сигналы предупреждения встречному ТС о предаварийной ситуации и формируют управляющие воздействия на тормозную систему до полной остановки управляемого ТС.
Технический результат состоит в согласованном автоматическом торможении до полной остановки двух встречно движущихся ТС на безопасной дистанции без блокирования колес на сухих и скользких покрытиях.
Заявленное изобретение поясняется рисунками, где на фиг. 1 приведены ситуации, возникающие при прямолинейном движении и при повороте. Начало координат декартовой системы совмещено с центром передней части управляемого ТС, оборудованного предлагаемой САЭТ.
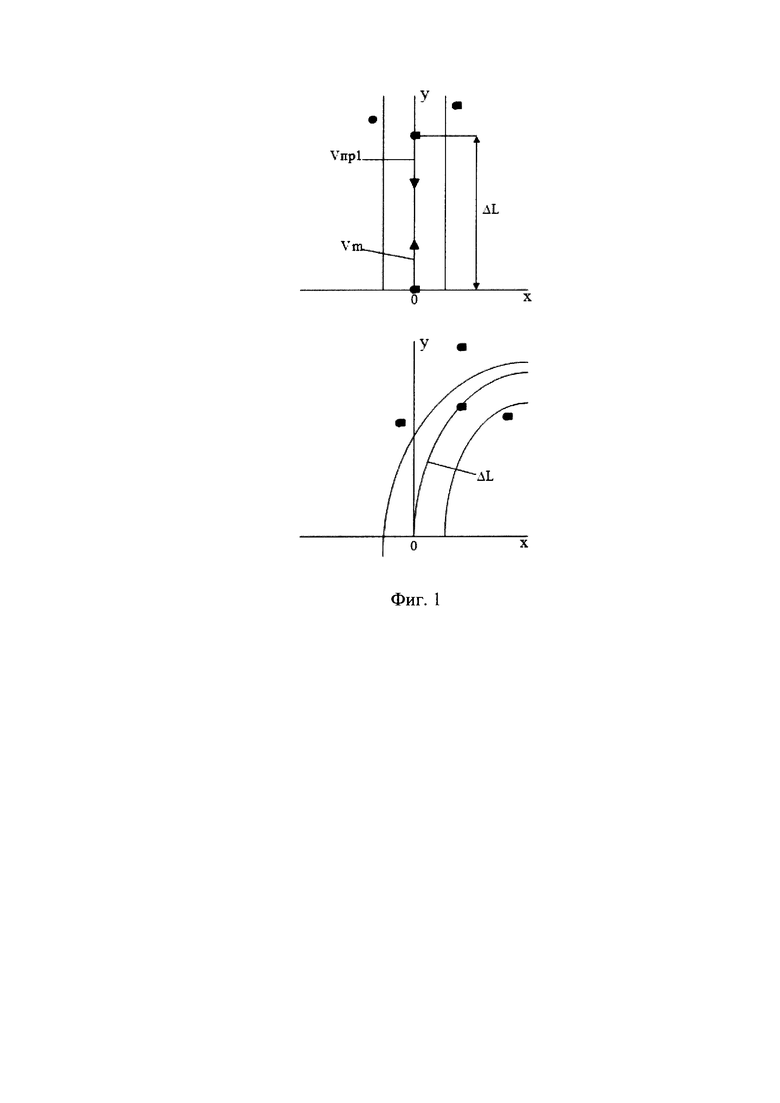
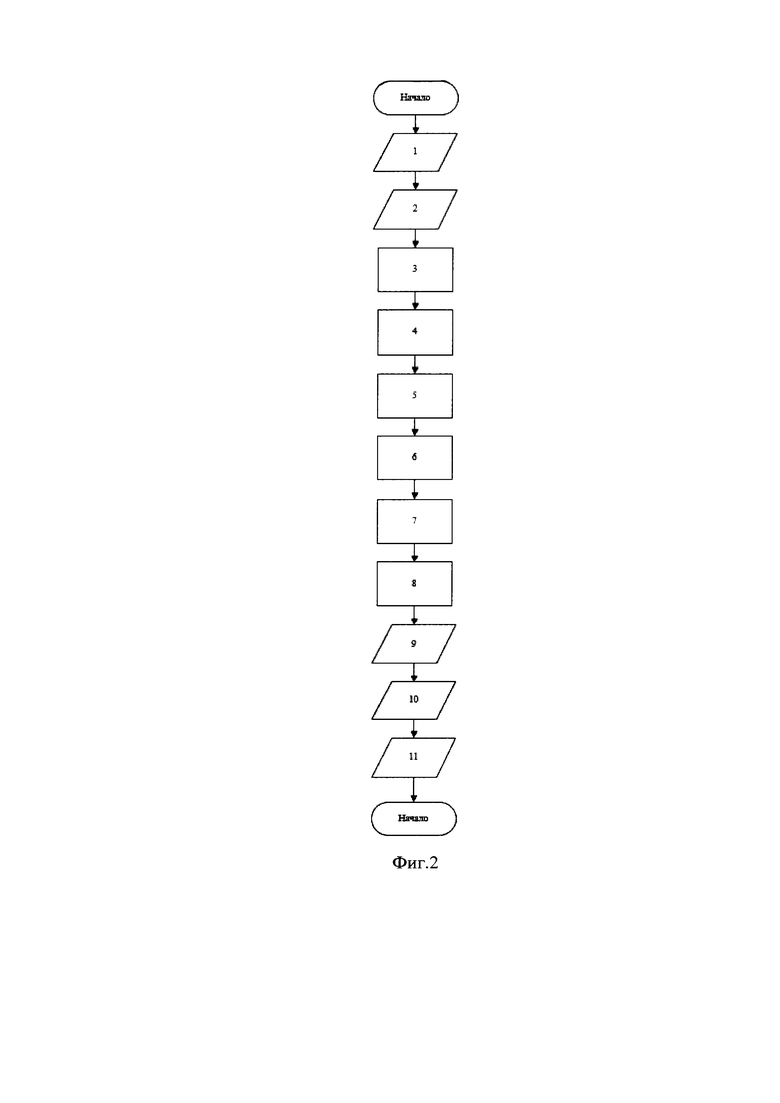
Фиг. 2 содержит блок-схему алгоритма управления торможением перед встречным ТС, который реализует следующие действия способа:
1) Ввод настроечных параметров используемой математической модели управляемого ТС.
2) Ввод данных от датчиков частот вращения колес и координатах препятствия от УТЗ, например, радара.
3) Вычисление параметров движения управляемого ТС.
4) Формирование запрета на автоматическое торможение при недопустимых отклонениях от нормы параметров движения управляемого ТС.
5) Выбор оценок дистанции до препятствия из резервированных данных.
6) Вычисление максимального и порогового замедлений управляемого ТС.
7) Вычисление тормозного замедления.
8) Сравнение тормозного замедления с пороговым значением.
9) Предупреждение водителю о предаварийной ситуации.
10) Включение аварийной сигнализации.
11) Формирование управляющих воздействий на тормозную систему.
Если оба ТС, двигающихся по одной полосе во встречных направлениях, оснащены САЭТ предлагаемой конструкции, то предотвращение столкновения возможно при выполнении определенных условий.
Так, в частности, граничное значение дистанции ΔL, необходимой и достаточной для полной остановки двух встречных ТС, то есть двигающихся по одной полосе во встречных направлениях, определяется уравнением:

где Vm и Vпр - скорости управляемого ТС и встречного ТС; τm и τпр - запаздывание в тормозной системе управляемого ТС и встречного ТС;
aT и апр - тормозное замедление управляемого ТС и встречного ТС;
ΔLзап - запас по дистанции в момент остановки.
Принимая для однотипных САЭТ одинаковые запаздывания в управляемом и встречном ТС τm=τпр, получим при условии равных замедлений aT=апр уравнение замедления для совместного торможения:

где ΔL*=ΔL - (Vm+Vпр)⋅Δτm - ΔLзап.
В качестве примера рассмотрим совместное торможение управляемого ТС и препятствия в виде встречного ТС при Vm=Vпp=20 м/с, ΔL*=50 м, τm=0.3 с и ΔLзап=3 м.
Величина тормозного замедления aT составляет 8 м/с2 при обнаружении встречного препятствия в виде ТС на полосе движения управляемого ТС на дистанции ΔL=65 м.
Управляющее воздействие U3, равное отношению давления в тормозной системе к его максимальному значению, определяется из уравнения тормозного замедления:
где m0 - масса управляемого ТС;
k3i - коэффициенты усиления тормозного устройства i-го колеса управляемого ТС, 1≤i≤4.
Управляющее воздействие  где aT ограничено величиной aTmax, определяемой пиковыми значениями коэффициентов сцепления колес с дорожным покрытием.
где aT ограничено величиной aTmax, определяемой пиковыми значениями коэффициентов сцепления колес с дорожным покрытием.
Максимальное значение тормозного замедления aTmax, развиваемого тормозной системой без блокирования колес, определяется уравнением:
m1, m2, m3, m4 - массы, приходящиеся на 1, 2, 3 и 4 колеса;
Rd - динамический радиус колеса;
 - минимальное значение коэффициента трения скольжения колес.
- минимальное значение коэффициента трения скольжения колес.
Ограничение U3 величиной  исключает блокирование колес при торможении.
исключает блокирование колес при торможении.
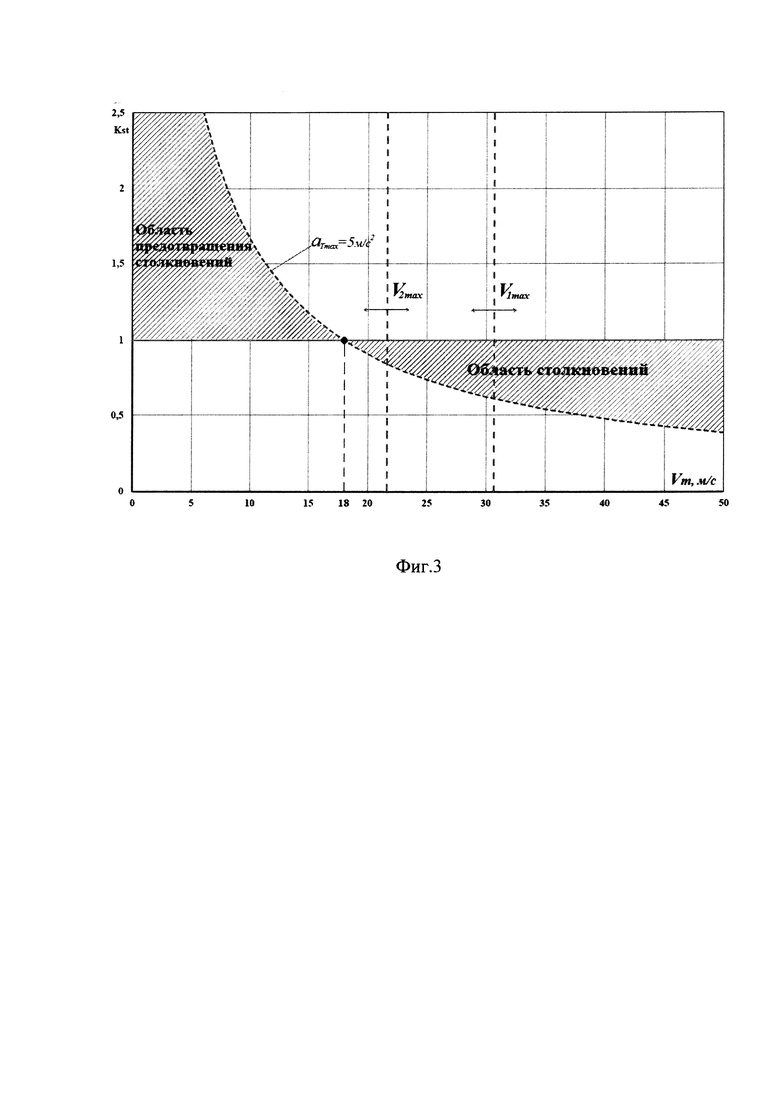
На Фиг. 3 приведены области столкновений и их предотвращения в зависимости от скорости центра масс Vm. Граница между этими областями проходит на уровне KST=1.
Величина KST определяется отношением двух дистанций: дистанции включения торможения (LON) и дистанции, достаточной для полной остановки (LST). Дистанция обнаружения препятствия LR принимается большей или равной LON. При использовании алгоритма экстренного торможения, предписываемого 131 Правилом ЕЭК ООН:
LON=τ⋅Vm,
где τ - время прогнозируемого столкновения.

где τm - время запаздывания срабатывания тормозной системы.

При τ=2 с, τm=0.2 с и aTmax=5 м/с2 величина KST>1, если Vm<18 м/с, равна 1 при Vm=18 м/с (64.8 км/ч) и KST<1, если Vm>18 м/с.
В диапазоне скоростей от 0 до 18 м/с управляемое ТС будет останавливаться перед препятствием без столкновения с ним, но на дистанции, возрастающей с увеличением KST.
В диапазоне скоростей от 18 м/с до максимальной скорости управляемого ТС столкновение с препятствием неизбежно при условии сохранения полосы движения.
В условиях неопределенности величины aTmax движение на относительно больших скоростях сопряжено с рисками столкновений, которые автоматически предотвратить невозможно.
Для САЭТ рассмотренного типа в случае торможения перед встречным препятствием в виде ТС:


При Vm=Vt отношение дистанций LON к LST совпадает с предыдущим и предотвращение столкновений оказывается невозможным при Vm>18 м/с.
При использовании известного усовершенствованного алгоритма САЭТ
LON=LST и соответственно KST=1 в диапазоне скоростей Vm от 0 до 
При LR=100 м и прочих равных условиях V1max=30.65 м/с (110.3 км/ч), что превышает в 1.7 раза предельную скорость предотвращения столкновения с неподвижным препятствием в виде ТС для САЭТ предыдущего типа.
В случае торможения перед встречным препятствием в виде ТС, который также оборудован САЭТ усовершенствованного типа:

где  - значение запаса по дистанции в момент остановки.
- значение запаса по дистанции в момент остановки.

Отношение LON к LST оказывается больше 1, если  в диапазоне скоростей от 0 до
в диапазоне скоростей от 0 до 
Величина V2max для принятых выше условий составляет 21.38 м/с (77 км/ч).
Описанная последовательность действий способа и используемое для его реализации минимальное число технических средств позволяет достичь следующих технических преимуществ над известными способами:
- гарантированное предотвращение столкновения со встречным ТС, оснащенным САЭТ с аналогичной функцией в случае обнаружения встречного ТС на дистанции, не менее граничной;
- гарантированное предотвращение столкновений со встречным ТС, управляемым адекватным водителем с нормальной реакцией на срабатывание аварийной световой и звуковой сигнализаций;
- снижение тяжести последствий лобового столкновения со встречным ТС, не реагирующего на сигналы предупреждения о торможении, достигается за счет снижения собственной скорости и суммарной скорости сближения;
- автоматическое определение момента времени активации тормозной системы в зависимости от скоростей движения встречных ТС, состояния дорожного покрытия и измеряемого в режиме реального времени коэффициента сцепления шин с опорной поверхностью дорожного покрытия;
- запрет активации автоматического торможения при обнаружении опасных состояний колес и тормозов, а также отказов УТЗ;
- автоматическое снижение порогового значения замедления начала торможения в случае обнаружения асимметрии осевых колесных пар из-за падения давления в шинах;
- резервирование данных УТЗ о дистанции между встречными ТС на временном интервале торможения путем интегрирования скорости сближения, предусматривающее использование полученных оценок дистанции при сбоях УТЗ;
- практически полное исключение влияния освещенности, осадков, тумана и задымленности на результаты при использовании в качестве УТЗ автомобильных радаров.
На основании изложенного можно утверждать следующее.
Поставленная техническая задача решается техническими средствами и может быть использована в предложенном виде для использования на новых и находящихся в эксплуатации транспортных средствах, следовательно, предложение соответствует критерию изобретения «промышленная применимость».
Предложение имеет отличия от известного способа работы, следовательно, соответствует критерию изобретения «новизна».
Предложение при выполнении всех известных и новых действий способа позволяет достичь новых, ранее неизвестных технических результатов, следовательно, соответствует критерию изобретения «изобретательский уровень».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ С ПРЕПЯТСТВИЯМИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2335805C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2737069C1 |
| Способ управления движением транспортных средств с системами помощи водителю в среде "интеллектуальная транспортная система - транспортное средство - водитель" | 2021 |
|
RU2774261C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНЫХ СРЕДСТВ, ДВИЖУЩИХСЯ ДРУГ ЗА ДРУГОМ ПО ОДНОЙ ПОЛОСЕ | 2023 |
|
RU2822940C1 |
| СИСТЕМА ПОМОЩИ ПРИ ВОЖДЕНИИ | 2018 |
|
RU2694878C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2450365C2 |
| УСТРОЙСТВО ПОМОЩИ ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ | 2020 |
|
RU2737180C1 |
| УСТРОЙСТВО ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА С РАКЕТНЫМ ДВИГАТЕЛЕМ | 2019 |
|
RU2715507C1 |
| Способ повышения безопасности транспортного средства при групповых столкновениях | 2016 |
|
RU2632238C2 |
| Способ идентификации максимальных значений коэффициентов трения скольжения колёс транспортного средства | 2022 |
|
RU2779539C1 |
Изобретение относится к автомобилестроению, в частности к способам повышения активной безопасности транспортных средств, и может быть использовано в бортовой системе автоматического экстренного торможения. Согласно способу предотвращения столкновения со встречным препятствием в виде ТС на полосе движения известным способом измеряют продольную скорость центра масс, угол поворота управляемых колес и дистанцию до препятствия в передней полусфере. Затем в блоке обработки информации и управления определяют прогнозируемую полосу движения управляемого ТС, положение препятствия на ней, по производной дистанции сближения и собственной скорости определяют скорость встречного ТС и вычисляют величину замедления, достаточного для полной остановки без столкновения каждого из двух встречно движущихся ТС. В случае превышения порогового уровня замедления формируют световой и звуковой сигналы предупреждения встречному ТС о предаварийной ситуации и формируют управляющие воздействия на тормозную систему до полной остановки управляемого ТС. Достигается предотвращение столкновений со встречными транспортными средствами на полосе движения управляемого ТС. 3 ил.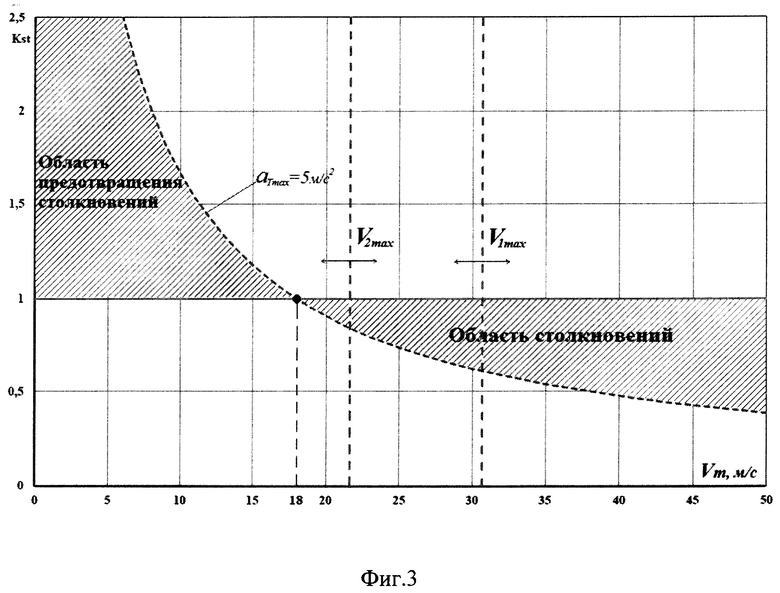
Способ предотвращения столкновений управляемого ТС со встречным препятствием в виде ТС путем измерения скоростей движения и дистанции между встречно движущимися ТС на одной полосе движения, отличающийся тем, что измеряют дистанцию до встречного ТС, например по данным устройств технического зрения (УТЗ), таких как радар или стереокамера, по этой дистанции и углу поворота управляемых колес определяют положение встречного ТС на прогнозируемой траектории движения управляемого ТС, по производной расстояния до встречного ТС определяют знак и величину скорости встречного ТС, вычисляют значение тормозного замедления, достаточного для полной остановки встречных ТС на заданной дистанции, в случае превышения порогового уровня замедления формируют предупреждения водителю и сигналы световой и звуковой аварийной сигнализации участникам движения о возникновении критической предаварийной ситуации, одновременно задают управляющее воздействие на тормозную систему, соответствующее вычисленному тормозному замедлению, ограниченному максимальным значением, определяемым условиями предотвращения блокирования колес на дорожном покрытии, предельные коэффициенты сцепления колес с дорожным покрытием, на котором идентифицируют в реальном времени резервирование данных измерения дистанции, получаемых от УТЗ, на временном интервале торможения выполняют путем интегрирования оценок скорости сближения, причем для прочих ТС, которые находятся в расчетной зоне и не оснащены САЭТ данного типа, включение аварийной сигнализации выполняют по аварийному сигналу для информирования о необходимости быстрой активации торможения с наибольшим возможным замедлением.
| US 2019088133 A1, 21.03.2019 | |||
| US 2005107955 A1, 19.05.2005 | |||
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550566C2 |
| US 11400927 B2, 02.08.2022 | |||
| Способ определения окиси алюминия в металлической алюминиевой пудре | 1940 |
|
SU61052A1 |

