Изобретение относится к автомобилестроению, в частности к способам и устройствам повышения активной безопасности транспортных средств, и может быть использовано в бортовой локальной информационно-вычислительной сети транспортного средства.
Известно устройство контроля за безопасностью движения автомобильного транспорта, которое содержит датчик угловой скорости, датчики органов управления, накопитель информации, пульт управления, датчик времени, микропроцессор, дисплей, второй датчик угловой скорости, контроллер. При этом первый и второй входы/выходы микропроцессора соединены соответственно с датчиком времени и с накопителем информации для записи в накопитель и считывания из него сигналов датчиков с указанием времени записи. Первый и второй выходы микропроцессора подключены соответственно к дисплею и контроллеру для подключения к его выходу переносного блока памяти. Первый и второй входы микропроцессора подключены соответственно к датчикам скорости левого и правого управляемых колес автомобиля, а пульт управления подключен к третьему входу микропроцессора для включения программы микропроцессора, по которой осуществляется чтение информации из накопителя и расчет параметров движения автомобиля. Известное устройство работает следующим образом.
Устройство работает в двух режимах: записи и контроля. Режим записи осуществляется во время движения автомобиля, когда в накопитель информации с установленным дискретом во времени записываются: реальное время, получаемое от датчика времени, скорости вращения левого и правого управляемых колес, сигналы датчиков органов управления автомобилем. Режим записи информации осуществляется микропроцессором в соответствии с программным обеспечением. (Патент РФ №2193233, МПК 7 G07C 5/08, опубл. 20.11.2002 г.).
Известна автомобильная бортовая информационная система, содержащая электронный блок, состоящий из лицевой панели с окном и нишей, имеющей отверстия для контактных гнезд, и корпуса с цифровым дисплеем, имеющим экран, совместимый с окном лицевой панели, динамиком, печатными платами, а также элементы фиксации электронного блока в панели автомобиля, контактный электрический соединитель, поддерживаемый интерфейс K-Line в соответствии с ISO 9141 и ISO 14230-1, отличающаяся тем, что она снабжена клавиатурой с клавишами, имеющими просвечиваемую светодиодами маркировку, световодами, выполняющими функции дополнительной индикации излучаемым светодиодами светом, фотодатчиком и фотоприемником, фоточувствительные части которых размещены на наружной стороне лицевой панели, и печатной платой управления с кнопками, светодиодами, остальными частями фотодатчика и фотоприемника, встроенной на внутренней стороне лицевой панели, а также установленными на корпусе платой инвертора и главной платой с выступающими в передней части контактными гнездами для совмещения с отверстиями ниши на лицевой стороне панели и выступающими в задней части корпуса контактным электрическим соединителем, гнездом для подключения внешней антенны, видеокамерой заднего вида, размещаемой на заднем стекле автомобиля, и поддерживаемыми интерфейсами USB (Host, Slave), USB - OTG, 1 - Ware, CAN 2.0 В. Принцип работы системы основан на базе мультиплексной и информационно-диагностических систем, объединяющей датчики, исполнительные механизмы и электронные блоки. (Патент РФ №2268829, МПК 8 B60R 16/02, опубл. 27.01.2006 г.)
Наиболее близким по технической сущности является, способ и устройство ограничения скорости автомобиля в зависимости от динамических характеристик в боковом движении включает систему, прерывающую подачу топлива. (Патент РФ №2261188, МПК 7 В60Т 8/24, опубл. 27.09.2005 г.)
Устройство содержит два датчика, установленных на мосту и фиксирующих показания бокового ускорения моста и ускорения поворота моста, два последовательно включенных интегратора, обрабатывающих сигналы с датчиков и выдающих переменные составляющие бокового перемещения и угла поворота, коррелятор, расположенный на кузове автомобиля, с установленными на нем двумя датчиками бокового ускорения кузова и ускорения поворота кузова, звено сдвига, перемножитель и интегратор, определяющий по переменным составляющим импульсные переходные функции объекта, которые подаются на вход электронного устройства определения критической скорости автомобиля, определяющего значение критической скорости с использованием частотного критерия устойчивости, а также рассогласователь, который разрывает связь между датчиком положения педали подачи топлива и электронным блоком управления впрыском при достижении действительной скорости автомобиля критической, тем самым ограничивая скорость автомобиля в прямолинейном движении.
Работа устройства осуществляется следующим образом: сигналы с датчиков, фиксирующих показания бокового ускорения моста и ускорения поворота моста, подаются на два последовательно включенных интегратора, где сигналы дважды интегрируются. На выходе интеграторов получают переменные составляющие бокового перемещения и угла поворота. Далее сигналы подаются на коррелятор, определяющий по переменным составляющим импульсные переходные функции объекта.
Недостатками известных устройств и способов данного электронного оснащения автотранспортных средств являются ограниченные функциональные возможности, а именно только ограничение максимальной скорости прямолинейного движения, низкая помехозащищенность и высокая стоимость.
Техническая задача, на решение которой направлено предлагаемое изобретение, состоит в предотвращении типовых столкновений автомобиля за счет динамической стабилизации физических переменных, характеризующих состояние автомобиля.
Поставленная техническая задача решается тем, что в способе предотвращения столкновений автомобиля с препятствиями путем регистрации импульсов, формируемых датчиками первичной информации о физических переменных, характеризующих состояние автомобиля, и передачи их в блок обработки информации, в котором определяют граничные значения физических переменных, характеризующих критические состояния автомобиля, согласно предложенному изобретению, регистрируют импульсы, формируемые датчиками частот вращения колес, которые используют в качестве датчиков первичной информации о физических переменных, характеризующих состояние автомобиля, и подают на вход блока обработки информации, в котором по значениям частот вращения колес определяют в реальном времени значения физических переменных и граничные значения физических переменных, характеризующих критические состояния автомобиля, на выходе блока обработки информации формируют сигнал с информацией о приближении к граничным значениям физических переменных, характеризующих критические состояния автомобиля, или их превышении и передают на средство визуального отображения информации и на, по крайней мере, одно средство индикации опасных состояний, которые активируют в соответствии с формируемым сигналом, в зависимости от значений физических переменных и граничных значений физических переменных, характеризующих критические состояния автомобиля, формируют сигнал с управляющим действием, предотвращающим столкновения автомобиля с препятствиями.
Дополнительное отличие способа состоит в том, что в блоке обработки информации импульсы, формируемые датчиками частот вращения колес, обрабатывают посредством программного обеспечения, которое конфигурируют с возможностью определения в реальном времени по значениям частот вращения колес значений физических переменных и граничных значений физических переменных, характеризующих критические состояния автомобиля, и выбора соответствующего средства индикации опасных состояний для передачи соответствующего формируемого сигнала об опасном состоянии автомобиля.
Дополнительное отличие способа также состоит в том, что в блоке обработки информации, импульсы, формируемые датчиками частот вращения колес, обрабатывают посредством программного обеспечения, которое конфигурируют с возможностью идентификации состояния датчиков частот вращения колес и компенсации влияния их неисправностей на результаты определения в реальном времени по значениям частот вращения колес значений физических переменных и граничных значений физических переменных, характеризующих критические состояния автомобиля.
Решение поставленной технической задачи достигается также тем, что система для предотвращения столкновений автомобиля с препятствиями, содержащая датчики первичной информации о физических переменных, характеризующих состояние автомобиля, соединенные посредством линий связи с блоком обработки информации, включающим микропроцессор, соединенный со средством визуального отображения информации, согласно предложенному изобретению, включает в качестве датчиков первичной информации о физических переменных, характеризующих состояние автомобиля, датчики частот вращения колес, каждый из которых соединен посредством линий связи с микропроцессором, блок обработки информации дополнительно включает, по крайней мере, одно, соединенное с микропроцессором средство ввода настроечных данных и управления режимами отображения информации и, по крайней мере, одно, средство индикации опасных состояний, микропроцессор выполнен с возможностью идентификации состояния датчиков частот вращения колес, определения в реальном времени по значениям частот вращения колес значений физических переменных и граничных значений физических переменных, характеризующих критические состояния автомобиля, и формирования сигнала с информацией о приближении упомянутых значений к граничных значениям физических переменных, характеризующих критические состояния автомобиля или их превышении.
Дополнительное отличие системы состоит в том, что микропроцессор выполнен с возможностью компенсации влияния неисправностей датчиков частот вращения колес на результаты определения в реальном времени по значениям частот вращения колес значений физических переменных и граничных значений физических переменных, характеризующих критические состояния автомобиля.
Дополнительное отличие системы состоит в том, что микропроцессор снабжен программным обеспечением, которое сконфигурировано с возможностью определения в реальном времени по значениям частот вращения колес значений физических переменных, и граничных значений физических переменных, характеризующих критические состояния автомобиля, и формирования сигнала с информацией о приближении упомянутых значений к граничным значениям физических переменных, характеризующих критические состояния автомобиля или их превышении, идентификации состояния датчиков частот вращения колес и компенсации влияния неисправностей датчиков частот вращения колес на результаты определения упомянутых значений.
Техническим результатом изобретения является расширение функциональных возможностей системы предотвращения типовых столкновений, достигаемое в минимальной конфигурации используемых технических средств за счет динамической стабилизации физических переменных, характеризующих состояние автомобиля путем осуществления предложенного способа.
Так, в частности, верхняя граница безопасной скорости движения автомобиля  определяется как минимальная из группы граничных скоростей
определяется как минимальная из группы граничных скоростей  , 1≤i≤6:
, 1≤i≤6:
 где
где
 - верхняя граница скорости, задаваемая с учетом установленных правилами дорожного движения ограничений скорости в населенных пунктах, вне населенных пунктов и на автомагистралях;
- верхняя граница скорости, задаваемая с учетом установленных правилами дорожного движения ограничений скорости в населенных пунктах, вне населенных пунктов и на автомагистралях;
 - верхняя граница скорости разрыва корда шины с учетом значений износов кордов, давлений и марки шины;
- верхняя граница скорости разрыва корда шины с учетом значений износов кордов, давлений и марки шины;
 - верхняя граница скорости пробуксовки ведущих колес, определяемая с учетом параметров автомобиля и дорожного покрытия;
- верхняя граница скорости пробуксовки ведущих колес, определяемая с учетом параметров автомобиля и дорожного покрытия;
 - верхняя граница безопасной скорости прохождения виража, определяемая как минимальная из скоростей заноса задних колес, сноса передних колес и скорости опрокидывания автомобиля;
- верхняя граница безопасной скорости прохождения виража, определяемая как минимальная из скоростей заноса задних колес, сноса передних колес и скорости опрокидывания автомобиля;
 - верхняя граница безопасной скорости движения с установленным запасным колесом (докаткой) уменьшенного диаметра;
- верхняя граница безопасной скорости движения с установленным запасным колесом (докаткой) уменьшенного диаметра;
 - верхняя граница безопасной скорости движения, определяемая дополнительными углами развала колес.
- верхняя граница безопасной скорости движения, определяемая дополнительными углами развала колес.
Выполнение неравенства  означает, что все достаточные условия предотвращения столкновений
означает, что все достаточные условия предотвращения столкновений  также выполняются.
также выполняются.
В том случае, когда  , на индикаторе формируется сигнал превышения безопасной скорости, который сохраняется до момента, когда
, на индикаторе формируется сигнал превышения безопасной скорости, который сохраняется до момента, когда  .
.
Управляющие воздействия на дроссельную заслонку двигателя, тормоза и рулевое колесо формируются водителем с целью снижения скорости движения Vm до безопасного состояния , при котором на индикаторе не формируется сигнал превышения безопасной скорости.
Для предотвращения возможных превышений динамических границ скорости движения предусматривается прогнозирование на время τэ скорости центра масс Vm и угла поворота управляемых колес ψс:
 где
где
 - прогнозируемая скорость центра масс;
- прогнозируемая скорость центра масс;
 - прогнозируемый угол поворота управляемых колес;
- прогнозируемый угол поворота управляемых колес;
 - первая производная угла поворота управляемых колес ψc.
- первая производная угла поворота управляемых колес ψc.
Аналогичным образом формируют сигналы о превышении граничных значений давлений воздуха в шинах, температур перегрева шин, скоростей продольных скольжений колес.
В случае возникновения сигнала о превышении граничных значений давлений, водитель имеет возможность выбрать безопасное место для вынужденной остановки и устранить возникшую асимметрию давлений в шинах.
В случае превышения температур перегрева шин, водителю следует снизить скорость движения до величины, при которой превышение температуры перегрева не происходит и сигнал о превышении не формируется.
В случае превышения граничных значений скоростей продольных скольжений при пробуксовках или блокировках колес управляющие воздействия на дроссельную заслонку и соответственно на педаль тормоза уменьшаются водителем до момента, когда сигнал о превышении не формируется.
В случае, если граничное значение безопасной дистанции между попутными автомобилями превышает истинные значения дистанций, оцениваемых водителем, необходимо формирование водителем управляющих воздействий на дроссельную заслонку или тормоза для увеличения дистанций, превосходящих граничное значение.
В случае, если граничное значение дистанции, необходимой для полной остановки, превышает дистанцию обнаружения неподвижных препятствий, оцениваемую водителем в условиях ограниченной видимости, необходимо формирование водителем управляющих воздействий на дроссельную заслонку или тормоза для уменьшения граничного значения дистанции до значения, меньшего дальности обнаружения неподвижных препятствий в конкретных условиях движения.
Неисправности подвески или рулевого управления в результате недопустимых износов шарнирных соединений обнаруживаются водителем по величине модуля угла схождения управляемых колес, который определяется на горизонтальных участках гладкого дорожного покрытия в режиме выбега при нейтральном состоянии КПП и нулевом управляющем воздействии на тормозную систему.
Неисправности тормозной системы обнаруживаются водителем по отклонениям измеряемых величин замедления от значения замедления, приводимого в технических данных автомобиля, или по асинхронности превышений граничных скольжений в осевых парах колес при торможениях или по увеличению замедления в режиме выбега.
Неисправности двигателя обнаруживаются водителем по отклонению значений мгновенной мощности двигателя при разгонах на пониженных передачах от значения, приводимого в технических данных автомобиля.
Неисправности топливной системы обнаруживаются водителем по отклонениям значений удельного и общего расхода топлива от фактических значений.
Предложенные способ предотвращения столкновений автомобиля с препятствиями и система для его осуществления позволяют определить ошибки в управлении транспортным средством и опасные неисправности транспортного средства и предотвратить возможность столкновения транспортного средства с препятствиями за счет управляющих воздействий на органы управления автомобилем.
К числу критических состояний относятся ситуации, в которых транспортное средство представляет опасность для движения, создавая угрозу возникновения столкновений с препятствиями. Критические состояния могут возникать в движении и при вынужденных остановках.
К столкновениям с препятствиями относятся столкновения с объектами, находящимися на поверхности дороги, и столкновения с поверхностью дороги при опрокидывании автомобиля.
Причинами предотвращаемых столкновений с препятствиями являются ошибки управления и технические неисправности.
Технические неисправности могут приводить к непрогнозируемым изменениям направления движения автомобиля или к вынужденным остановкам, которые создают опасность для движения.
Причинами предотвращаемых столкновений управляемого автомобиля с препятствиями, находящимися на той же полосе движения, являются ошибки выбора дистанций между попутными автомобилями, ошибки выбора скорости движения в условиях ограниченной дальности обнаружения неподвижных препятствий и ошибки выбора скорости движения на виражах, приводящие к опрокидываниям.
Причинами столкновений управляемого автомобиля с препятствиями, находящимися на соседних полосах движения, являются непрогнозируемые изменения направления движения в результате ошибок управления или технических неисправностей автомобиля.
Причинами опрокидываний автомобиля, происходящих за границами дорожного покрытия, также являются непрогнозируемые изменения направления движения в результате ошибок управления или технических неисправностей автомобиля.
В число предотвращаемых столкновений управляемого автомобиля входят столкновения, обусловленные следующими ошибками управления и техническими неисправностями автомобиля.
К рассматриваемым ошибкам управления относятся:
- ошибки выбора скорости движения на виражах, которые могут приводить к опрокидываниям или к непрогнозируемым изменениям направления движения из-за сноса передних или заноса задних колес автомобиля;
- ошибки выбора скорости движения в условиях ограниченной дальности обнаружения неподвижных препятствий, которые могут приводить к столкновениям с из-за недостаточной для полной остановки дистанции до неподвижного препятствия;
- ошибки выбора скорости движения на скользких покрытиях, включая режим аквапланирования, которые могут приводить к непрогнозируемым изменениям направления движения из-за недопустимых пробуксовок ведущих колес, либо из-за потери управляемости передних колес;
- ошибки выбора скорости движения с колесом уменьшенного диаметра (докаткой), установленным в передней или задней паре колес, которые могут приводить к непрогнозируемым изменениям направления движения при торможении;
- ошибки выбора дистанции между попутными транспортными средствами, которые могут приводить к столкновениям с попутными транспортными средствами при торможениях;
- ошибки выбора управляющих воздействий на дроссельную заслонку двигателя или тормозную систему, которые могут приводить к непрогнозируемым изменениям направления движения из-за недопустимых блокировок или пробуксовок колес при торможениях или разгонах;
- ошибки выбора скорости движения, превышающей скорость разрыва корда шины, которые могут приводить к непрогнозируемым изменениям направления движения. К рассматриваемым техническим неисправностям автомобиля относятся:
- асимметрия колесных пар, возникающая в результате недопустимой разности давлений в парах шин передних или задних колес;
- разрушение шины в результате разрыва корда или проворачивания шины на ободе;
- отсоединение колес от ступиц в результате отворачивания крепежных соединений или разрушения подшипников;
- разрушение подвески или рулевого управления в результате недопустимых износов шарнирных соединений;
- снижение эффективности колесных тормозов в результате потери герметичности тормозной системой, загрязнения рабочих поверхностей тормозов или заклинивания поршней тормозных цилиндров;
- снижение сил трения скольжения колес, отслоение протектора и разрушение корда в результате превышения допустимой температуры перегрева шин;
- неисправности двигателя, сопровождающиеся снижением развиваемой мощности и приводящие к вынужденным остановкам;
- неисправности топливной системы или двигателя, сопровождающиеся увеличением расхода топлива и приводящие к вынужденным остановкам.
Приведенные ошибки управления и технические неисправности автомобиля приводят к опасным состояниям автомобиля, при которых возможны столкновения с препятствиями.
Своевременное обнаружение опасных состояний позволяет сформировать управляющие воздействия, препятствующие возникновению опасных состояний и предотвратить возможность столкновения с препятствиями.
В качестве физических переменных, характеризующих состояния автомобиля, которые определяются по значениям частот вращения колес, рассматриваются переменные, определяемые из достаточных условий предотвращения столкновений, обусловленных приведенными ошибками управления и техническими неисправностями.
В число физических переменных, характеризующих состояние автомобиля, входят следующие переменные состояния для колес (1≤i≤4), центра масс, рулевой трапеции и двигателя:
- приращение пути (ΔLi), пройденного i-м колесом;
- линейная скорость вращения (Vi) i-го колеса;
- продольное ускорение (ai) i-го колеса;
- давление воздуха (Pi) в шине i-го колеса;
- температура перегрева (ΔTi) i-й шины;
- температурная составляющая давления (ΔРTi) i-й шины;
- статический радиус (RCi(0)) при Рi=0 i-го колеса;
- износ корда (ΔРKi) i-й шины;
- линейная скорость продольного скольжения (ΔVSi) i-го колеса;
- величина несоосности (dxi), пропорциональная дополнительному углу развала (Δγi) i-го колеса;
- число магнитов (Мi) на ободе i-го колеса;
- продольная скорость (Vm) центра масс автомобиля;
- продольное ускорение (аm) центра масс;
- поперечное ускорение (аq) центра масс;
- путь (Lm), пройденный центром масс;
- угол поворота (ψc) управляемых колес;
- угол схождения (ψs) управляемых колес;
- мгновенная мощность (WE), развиваемая двигателем;
- мгновенное значение удельного расхода топлива (GR);
- объем израсходованного топлива (BR);
В число идентифицируемых управляющих воздействий на органы управления автомобиля входят:
- номер передачи (U1) коробки переключения передач (КПП);
- положение дроссельной заслонки двигателя (U2);
- управляющее воздействие на тормозную систему (U3);
В число вычисляемых граничных значений физических переменных входят:
- граничная дистанция до попутного автомобиля (Ld);
- граничная дистанция до полной остановки (LS);
- модуль граничного угла поворота (DL) управляемых колес;
- верхняя граница скорости, задаваемая с учетом установленных правилами дорожного движения ограничений скорости в населенных пунктах, вне населенных пунктов и на автомагистралях 
- верхняя граница скорости разрыва корда шины с учетом значений износов кордов, давлений и марки шины 
- верхняя граница скорости пробуксовки ведущих колес, определяемая с учетом параметров автомобиля и дорожного покрытия 
- верхняя граница безопасной скорости прохождения виража, определяемая как минимальная из скоростей заноса задних колес, сноса передних колес и скорости опрокидывания автомобиля 
- верхняя граница безопасной скорости движения с установленным запасным колесом (докаткой) уменьшенного диаметра ( );
);
- верхняя граница безопасной скорости движения, определяемая дополнительными углами развала колес 
- верхние  и нижние
и нижние  границы давлений в i-й шине, определяемые из условий асимметрии, разрушения корда и проворачивания шины на ободе;
границы давлений в i-й шине, определяемые из условий асимметрии, разрушения корда и проворачивания шины на ободе;
- граничное значение температуры перегрева  шин;
шин;
- граничное значение модуля (|ΔVs|Гр) скорости продольных скольжений колес.
Граничные значения физических переменных определяются соотношениями, являющимися достаточными условиями предотвращения столкновений рассмотренных типов.
Значение  задается в режиме ввода данных в виде значений, например, 110 км/ч для случая движения по автомагистрали, или 60 км/ч для движения в населенных пунктах, или 90 км/ч для движения вне населенных пунктов.
задается в режиме ввода данных в виде значений, например, 110 км/ч для случая движения по автомагистрали, или 60 км/ч для движения в населенных пунктах, или 90 км/ч для движения вне населенных пунктов.
Значение  скорости разрыва корда шины определяется в виде:
скорости разрыва корда шины определяется в виде:
 где
где

 - граничное значение зоны упругих деформаций корда шины (мм);
- граничное значение зоны упругих деформаций корда шины (мм);
VT - скорость, определяемая по скоростному индексу шин (м·с-1);
ΔRki - износ корда 1-й шины(мм);
kРi=1 - коэффициент линейного расширения шины в зоне упругих деформаций (мм·бар-1);
kTi≈0.610-2 - коэффициент тепловой составляющей давления (бар·с·м-1);
kVi=10-5mTi[2πR2 CilTi]-1 - коэффициент влияния центробежной силы при вращении шины массой mTi с линейной скоростью VВ Гр2i(кг·м-3);
RCi, - статический радиус i-го колеса с шириной профиля lTi (мм);
РiH - номинальное значение давления в i-й шине (бар).
Значение  скорости пробуксовки ведущих колес при движении с постоянной скоростью определяется в виде:
скорости пробуксовки ведущих колес при движении с постоянной скоростью определяется в виде:
 где
где
kX - коэффициент лобового аэродинамического сопротивления ;
mo - полная масса автомобиля, задаваемая с учетом масс водителя, пассажиров, груза и топлива;
g - ускорение свободного падения;
kTp - коэффициент трения качения шин;
αT - угол тангажа;




kSi(0) - значение коэффициента трения покоя i-го колеса в продольном направлении.
Значение  безопасной скорости прохождения виража определяется как минимальная из граничных скоростей заноса задних колес
безопасной скорости прохождения виража определяется как минимальная из граничных скоростей заноса задних колес  сноса передних колес
сноса передних колес  и опрокидывания
и опрокидывания  автомобиля:
автомобиля:
 где
где






hm - высота центра масс автомобиля; ψc - угол поворота управляемых колес;
kSq(0) - значение коэффициента трения покоя шин в поперечном направлении.
Значение  верхней границы безопасной скорости движения с установленным запасным колесом уменьшенного диаметра (докаткой) определяется в виде:
верхней границы безопасной скорости движения с установленным запасным колесом уменьшенного диаметра (докаткой) определяется в виде:
 где
где
 - верхняя граница безопасной скорости движения с докаткой в передней паре колес;
- верхняя граница безопасной скорости движения с докаткой в передней паре колес;
 - верхняя граница скорости движения с докаткой в задней паре колес; Сi(1≤i≤4) - двоичный признак формирования сигналов датчиков частот вращения колес.
- верхняя граница скорости движения с докаткой в задней паре колес; Сi(1≤i≤4) - двоичный признак формирования сигналов датчиков частот вращения колес.
Учитывая, что докатка не оснащается активными элементами (магнитами), двоичный признак Сi=0 для датчика i-го колеса - докатки, что позволяет определить номер датчика и положение докатки в колесной схеме.
Значение  верхней границы безопасной скорости движения, определяемой несоосностью, определяется в виде:
верхней границы безопасной скорости движения, определяемой несоосностью, определяется в виде:
 где
где
|dxm|=max{|dx1|,|dx2|,|dx3|,|dx4|} - максимальное значение модуля несоосности.
|dxi| - значение модуля несоосности i-го колеса, 1≤i≤4;
dxГр - граничное значение величины несоосности.
Все приведенные физические переменные кроме приращений пути (ΔLi), скоростей (Vi) и ускорений (аi) колес, используемых для промежуточных вычислений других физических переменных, выводятся на индикацию по запросам водителя, формируемым путем воздействия на клавиши управления индикацией.
Граничные значения физических переменных, характеризующие критические состояния автомобиля, определяют границы соответствующих физических переменных, соблюдение которых обуславливает безопасное состояние автомобиля.
Граничные значения физических переменных, характеризующих критические состояния автомобиля, являются опасными границами, приближение к которым или их превышении, приводит к опасным состояниям автомобиля и может повлечь столкновения с препятствиями.
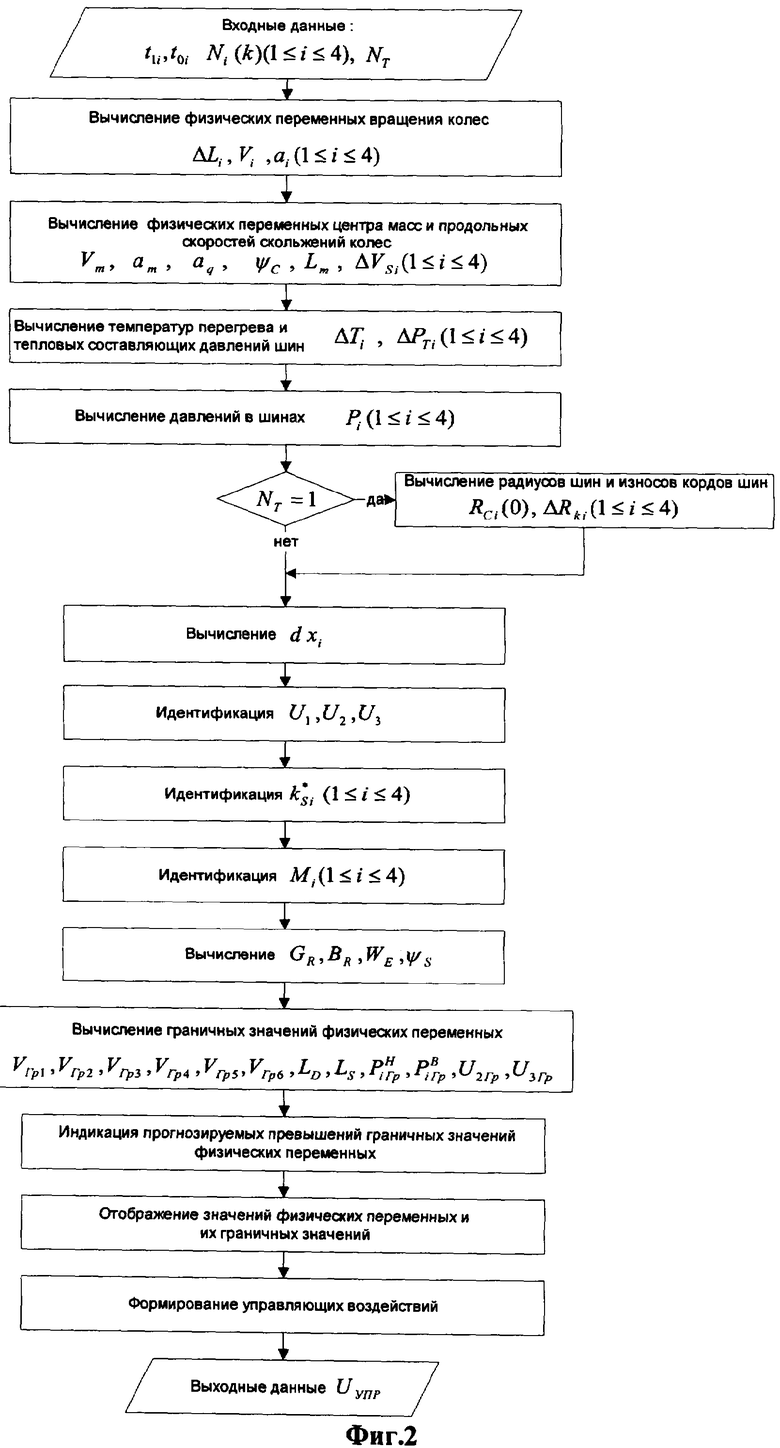
Сущность изобретения поясняется чертежами, где на фиг.1 показана блок-схема системы, реализующей способ, на фиг.2 показана блок-схема, поясняющая осуществление способа, на фиг.3 показана схема установки датчиков частот вращения колес индукционного типа.
Система для предотвращения столкновений автомобиля с препятствиями (фиг.1) содержит датчики первичной информации о физических переменных, характеризующих состояние автомобиля, в качестве которых используются датчики частот вращения колес 1, 2, 3, 4. Датчики частот вращения колес 1, 2, 3, 4 относятся к известным датчикам индукционного типа и устанавливаются на ободах 19 соответствующих колес, где крепятся два диаметрально расположенных постоянных магнита 20 каждого датчика, и тормозных щитах 21 автомобиля, где на кронштейне крепится каждый индукционный датчик 1 (фиг.3).
Система содержит блок 5 обработки информации, который включает микропроцессор 6, соединенное с ним средство 7 визуального отображения информации. Средство 7 визуального отображения информации выполнено, например, в виде жидкокристаллического экрана.
Блок 5 обработки данных включает также соединенные с микропроцессором 6 средства 8, 9, 10, 11 ввода настроечных данных и управления режимами отображения информации и, соединенные с микропроцессором 6, средства 12, 13, 14, 15 индикации опасных состояний.
Средства 12, 13, 14, 15 индикации опасных состояний и средства 8, 9, 10, 11 управления режимами отображения информации попарно сгруппированы таким образом, чтобы обеспечить наименьшее время доступа к информации о значениях физических переменных, обусловивших активацию соответствующего средства индикации опасных состояний.
Каждое из средств 8, 9, 10, 11 ввода настроечных данных и управления режимами отображения информации может быть выполнено в виде любого известного средства, предназначенного для выполнения данных функций, например, в виде многорежимных клавиш, сенсоров и т.п.
Каждое из средств 8, 9, 10, 11 выполнено с возможностью ввода одного или нескольких значений настроечных данных и управления одним или несколькими режимами отображения информации.
Например, средство 8 при первом нажатии клавиши обеспечивает возможность управления режимом отображения значений граничной дистанции до попутного препятствия и граничной дистанции, необходимой для полной остановки перед неподвижным препятствием, при втором нажатии клавиши соответственно - значения скорости центра масс автомобиля и значения граничной скорости движения автомобиля, приближение к которой или ее превышение приводит к опасным состояниям автомобиля и может повлечь столкновение с препятствием, при третьем нажатии клавиши - значения продольных и поперечных ускорений центра масс, при четвертом нажатии - значение угла поворота управляемых колес и значение граничного угла поворота управляемых колес.
Например, средство 9 при первом нажатии клавиши обеспечивает возможность управления режимом отображения значений давлений газа или смеси газов в шинах автомобиля, при втором нажатии клавиши соответственно - значений несоосности индукционных датчиков и магнитов (характеристик дополнительных углов развала колес), при третьем нажатии клавиши - значений износов кордов по каждому колесу, при четвертом нажатии клавиши - значений максимальных коэффициентов трения скольжения колес.
Например, средство 10 при первом нажатии клавиши обеспечивает возможность управления режимом отображения значений температур перегрева шин, при втором нажатии клавиши соответственно - значений удельного расхода и объема израсходованного топлива, при третьем нажатии клавиши - значений развиваемой мощности двигателя и угла схождения управляемых колес, при четвертом нажатии - граничных значений управляющих воздействий на дроссельную заслонку и тормоза, текущих значений указанных управляющих воздействий и номера передачи КПП.
Например, средство 11 при первом нажатии клавиши обеспечивает возможность управления режимом отображения значений пробега автомобиля с момента сброса последнего показания (при необходимости нового отсчета), при втором нажатии клавиши соответственно - выбор климатического режима настройки коэффициентов трения скольжения колес (лето - зима), при третьем нажатии клавиши - обеспечивает режим ввода настроечных параметров автомобиля в зависимости от модели и индивидуальных характеристик автомобиля и водителя (например, полная масса, распределение масс по колесам, номиналы давлений в передних и задних шинах, радиусы шин, передаточные числа КПП и главной передачи, параметры тормозной системы, время запаздывания включения тормозов, скоростной индекс шин, размеры колеи и базы автомобиля и др.)
В режиме ввода настроечных параметров автомобиля средство 8 при первом нажатии клавиши обеспечивает отображение идентификатора первого по списку настраиваемого параметра и его численного значения, хранящегося в памяти системы, при втором нажатии клавиши - соответственно идентификатора второго настраиваемого параметра и его численного значения, при последующих нажатиях клавиши - соответственно следующих по списку идентификаторов параметров и их числовых значений вплоть до последнего из списка.
Средство 11 при первом нажатии в режиме ввода настроечных параметров автомобиля обеспечивает отображение предыдущего по списку идентификатора и его численного значения, при последующих нажатиях клавиши - соответственно предыдущих по списку идентификаторов параметров и их численных значений вплоть до первого по списку.
В режиме ввода настроечных параметров автомобиля средство 9 при первом и последующих нажатиях обеспечивает увеличение численного значения настраиваемого параметра на величину шага по данной переменной.
В режиме ввода настроечных параметров автомобиля средство 10 при первом и последующих нажатиях обеспечивает уменьшение численного значения настраиваемого параметра на величину шага по данной переменной.
Чередование нажатий клавиш 9 и 10 при вводе одного настраиваемого параметра обеспечивает уменьшение шага по данному параметру в 10 раз.
В режиме отображения давлений средство 11 обеспечивает переход в режим настройки давлений, средство 8 служит для подтверждения команды настройки, средство 9 для обратного перехода в режим отображения давлений.
Каждое средство 12, 13, 14, 15 индикации опасных состояний может быть выполнено в виде любого известного средства, предназначенного для выполнения данных функций, например в виде светодиодных индикаторов. Каждое средство индикации опасных состояний выполнено с возможностью активации в случае достижения или превышения критических значений одной или несколькими определенными физическими переменными, характеризующими состояние автомобиля. Например, средство 12 индикации опасных состояний активируется при достижении или превышении критических значений скорости движения автомобиля. Например, средство 13 индикации опасных состояний активируется при достижении или превышении критических значений давления газа или смеси газов в шинах автомобиля. Например, средство 14 индикации опасных состояний активируется при достижении или превышении критических значений температуры перегрева шин. Например, средство 15 индикации опасных состояний активируется при достижении или превышении критических значений скоростей продольных скольжений колес.
В предложенной системе (фиг.1) каждый датчик частот вращения колес 1, 2, 3, 4 соединен посредством линий связи 16 с соответствующим входом микропроцессора 6 через оптронную пару 18, обеспечивающую нормализацию выходных сигналов, если входные сигналы превышают пороговый уровень срабатывания оптронной пары.
Микропроцессор 6 выполнен с возможностью идентификации состояния датчиков 1, 2, 3, 4 частот вращения колес, определения в реальном времени по значениям частот вращения колес значений физических переменных и граничных значений физических переменных, характеризующих критические состояния автомобиля, и формирования сигнала с информацией о приближении упомянутых значений физических переменных к критическим значениям физических переменных состояния автомобиля или их превышении. Микропроцессор 6 также выполнен с возможностью компенсации влияния неисправностей датчиков частот вращения колес на результаты определения в реальном времени по частотам вращения колес значений физических переменных и граничных значений физических переменных, характеризующих состояние автомобиля. Микропроцессор 6 снабжен программным обеспечением (Свидетельство об официальной регистрации программы №2006610522, приоритет от 13.12.2005 г., сведения опубликованы в официальном бюллетене №2 (55) за 2006 год, стр.122), которое сконфигурировано с возможностью определения в реальном времени по значениям частот вращения колес значений физических переменных и граничных значений физических переменных, характеризующих критические состояния автомобиля, и формирования сигнала с информацией о приближении упомянутых значений физических переменных к критическим значениям физических переменных состояния автомобиля или их превышении, идентификации состояния датчиков частот вращения колес и компенсации влияния неисправностей датчиков частот вращения колес на результаты определения упомянутых значений.
Система включает блок питания 17, соединенный со средством 7 визуального отображения информации и с микропроцессором 6, через который с блоком питания 17 соединены средства 12, 13, 14, 15 индикации опасных состояний.
Предложенный способ осуществляется следующим образом.
Датчики частот вращения колес 1, 2, 3, 4 устанавливают на ободах соответствующих колес и тормозных щитах автомобиля. Импульсы, формируемые датчиками частот вращения колес, поступают в блок обработки информации 5 на соответствующие каждому датчику входы микропроцессора 6. Импульсы регистрируют и по значениям частот вращения колес определяют в реальном времени значения физических переменных и граничных значений физических переменных, характеризующих критические состояния автомобиля. Значения физических переменных сравнивают с граничными значениями физических переменных.
В блоке обработки информации импульсы, формируемые датчиками частот вращения колес, обрабатывают посредством программного обеспечения, которым снабжен микропроцессор 6. Программное обеспечение конфигурируют с возможностью определения в реальном времени по значениям частот вращения колес значений физических переменных и граничных значений физических переменных, характеризующих критические состояния автомобиля, и выбора соответствующего средства индикации опасных состояний для передачи соответствующего формируемого сигнала об опасном состоянии автомобиля. Программное обеспечение конфигурируют с возможностью идентификации состояния датчиков частот вращения колес и компенсации влияния их неисправностей на результаты определения в реальном времени по значениям частот вращения колес значений физических переменных и граничных значений физических переменных, характеризующих критические состояния автомобиля.
Идентификацию состояния датчиков частот вращения колес осуществляют следующим образом.
Измеряют число импульсов, регистрируемых с каждого из датчиков частот вращения колес за фиксированный интервал времени, что соответствует частотам вращения колес. Определяют наибольшую из измеренных частот и вычисляют отношения измеренных частот к наибольшей. Частоты импульсов датчиков пропорциональны числу активных элементов (магнитов) датчиков и линейным скоростям вращения колес.
Число магнитов датчика частоты вращения колеса определяют равным двум, если измеренное значение скорости центра масс превышает определенное значение и измеренное продольное ускорение центра масс ограничено по модулю определенным значением и измеренной угол поворота управляемых колес также ограничен по модулю определенным значением, а отношение частоты импульсов датчика к наибольшей из частот датчиков приближенно равно единице.
Число магнитов датчика частоты вращения колеса определяют равным единице, если измеренное значение скорости центра масс превышает определенное значение и измеренное продольное ускорение центра масс ограничено по модулю определенным значением и измеренной угол поворота управляемых колес также ограничен по модулю определенным значением, а отношение частоты импульсов датчика к наибольшей из частот датчиков приближенно равно 0.5.
Число магнитов датчика частоты вращения колеса определяют равным нулю, если при неотрицательном измеренном продольном ускорении центра масс автомобиля либо отношение частоты импульсов датчика к сумме частот импульсов датчиков ведомых колес заднеприводного или передне-приводного автомобиля, превышающей определенное положительное значение, равно нулю, либо отношение частоты импульсов датчика к наибольшей из частот импульсов датчиков полноприводного автомобиля, превышающей предельную частоту вращения колес на низшей передаче КПП, равно нулю.
Компенсацию влияния неисправностей датчиков частот вращения колес на результаты определения значений и границ физических переменных осуществляют следующим образом.
К неисправностям датчиков частот вращения колес относят уменьшение числа магнитов датчиков на ободах колес с 2-х до 1-го или до нуля. Компенсацию влияния неисправностей осуществляют для датчиков с числом магнитов не менее одного. Линейные скорости вращения колес, которые являются входными данными для определения всех остальных физических переменных и их границ, определяют по формуле Эйлера для преобразования угловой скорости вращения в линейную. Угловую скорость вращения колес определяют как произведение частоты вращения колеса на константу 2π. Частоту импульсов датчиков принимают пропорциональной числу магнитов, равномерно расположенных на ободе колеса, и частоте вращения колеса. Частоту вращения колеса определяют равной половине частоты импульсов датчика, если число магнитов датчика равно двум. Частоту вращения колеса определяют равной частоте импульсов датчика, если число магнитов датчика равно единице.
Компенсацию влияния уменьшения числа магнитов датчиков с двух до одного обеспечивают тем, что изменяют соотношение между частотами импульсов датчиков и частотами вращения колес.
На выходе блока 5 обработки информации формируют сигнал с информацией о приближении к граничным значениям физических переменных, характеризующих опасное состояние автомобиля, или их превышении и передают его на средство 7 визуального отображения информации. Формируемый сигнал с упомянутой информацией подают и на соответствующие средства 12, 13, 14, 15 индикации опасных состояний, которое активируют в соответствии с формируемым сигналом в зависимости от значений физических переменных и их граничных значений физических переменных, характеризующих опасное состояние автомобиля. Далее формируют соответствующие управляющие воздействия, предотвращающие столкновения автомобиля с препятствиями (например, воздействие на тормозную систему).
Для решения поставленной технической задачи последовательно выполняют следующие операции.
Регистрируют число импульсов Ni(k) и моменты времени поступления последнего t1i и предыдущего t0i, импульсов датчиков частот вращения колес и определяют на временном интервале (шаге) вычислений (например, 1 секунда) частоту импульсов датчика. Для повышения точности определения частот вращения колес выполняют линейную интерполяцию приращений углов вращения колес в начале и в конце временного интервала вычисления.
Приращение пути ΔLi, пройденного колесом, определяют как произведение приращения угла вращения и радиуса колеса. Для повышения точности определения приращения пути, пройденного колесом, радиус колеса определяют суммой слагаемых радиуса колеса при нулевом давлении газа или смеси газов, слагаемого, пропорционального сумме номинального значения давления и тепловой составляющей давления, и слагаемого, пропорционального квадрату линейной скорости вращения колеса, определенной на предыдущем шаге.
Линейную скорость вращения колеса Vi определяют как отношение приращений пройденного пути колесом к шагу вычислений.
Линейное ускорение колеса аi определяют как отношение разности приращения пути, пройденного колесом, на текущем и предыдущем шагах к квадрату шага вычислений.
Для повышения точности определения линейной скорости вращения колеса ее значения переопределяют как отношение разности полутора приращений пути на текущем шаге и половины приращения пути на предыдущем шаге к величине шага вычислений, если определенное ранее значение линейной скорости не превосходит величины произведения половины частоты опроса портов используемого компьютера на квадрат шага вычислений и на модуль определенного ранее линейного ускорения колеса.
Продольную скорость центра масс Vm автомобиля определяют как полусумму линейных скоростей осевых или диагональных пар колес, оснащенных исправными датчиками частот вращения колес, если модуль разности полусуммы линейных скоростей и скорости центра масс на предыдущем шаге является наименьшим из множества осевых или диагональных пар колес. Продольное ускорение центра масс автомобиля am определяют как отношение разности скоростей центра масс на текущем и предыдущем шагах к шагу вычислений.
Если величина продольного ускорения центра масс не превосходит верхних и нижних границ ускорения, которые определяют из условия существования осевых и диагональных пар колес с нулевыми скоростями продольных скольжений, то угол поворота управляемых колес определяют как произведение отношения базы автомобиля к размеру колеи колес и отношения разности линейных скоростей вращения пары колес, которые используют для определения скорости центра масс, к скорости центра масс.
Если величина продольного ускорения центра масс превосходит верхнюю или нижнюю границы ускорений, то значение угла поворота управляемых колес определяют равным нулю, а скорость центра масс автомобиля, переопределяют как равную одной из линейных скоростей вращения колес оснащенных исправными датчиками частот вращения колес, если модуль разности скорости вращения колеса на текущем шаге и скорости центра масс на предыдущем шаге являются наименьшим из множества колес, оснащенных исправными датчиками частот.
Продольное ускорение центра масс переопределяют как отношение разности найденной скорости центра масс и скорости центра масс на предыдущем шаге к величине шага вычислений.
Если величина продольного ускорения центра масс превосходит верхнюю или нижнюю границу ускорения, которые определяют как максимальные и минимальные ускорения разгона и торможения с учетом типа привода, распределением масс на ведущие колеса, параметров тормозной системы, базы автомобиля и значений максимальных коэффициентов трения скольжения колес в текущий момент времени, то продольное ускорение переопределяют как максимальное или минимальное в зависимости от того, какая из границ превышена.
Продольную скорость центра масс, в этом случае, определяют как сумму продольной скорости центра масс на предыдущем шаге и произведения продольного ускорения на шаг вычислений.
Путь, пройденный центром масс, определяют путем интегрирования продольной скорости центра масс методом трапеций.
Значения скоростей продольных скольжений колес определяют как разности линейных скоростей вращения колес и продольной скорости центра масс и слагаемого, равного знакопеременному произведению продольной скорости центра масс, угла поворота управляемых колес, половины ширины колеи колес, деленного на размер базы автомобиля. Знак произведения отрицательный для колес левого борта и положительный для колес правого борта автомобиля.
Значение поперечного ускорения центра масс автомобиля аq определяют из уравнения центростремительной силы как отношение произведения квадрата продольной скорости центра масс и угла поворота управляемых колес к величине базы автомобиля.
Значения температур перегрева шин ΔТi автомобиля определяют путем численного интегрирования дифференциального уравнения первого закона термодинамики с идентифицированными коэффициентами и измеренными линейными скоростями вращения колес и скоростями продольных скольжений колес.
Значения тепловых составляющих давлений ΔРTi газа или смеси газов в шинах автомобиля определяют в соответствии с уравнением закона Шарля для изохорных процессов как отношение произведения начального значения давления в шине на температуру перегрева шины к температуре окружающей среды в градусах Кельвина.
Значения давлений Рi газа или смеси газов в шинах автомобиля определяют как численное решение системы дифференциальных уравнений давлений, которое приводят к сумме номинального давления, отклонения давления от номинала и тепловой составляющей давления в шине.
Значения номиналов давлений задают постоянными для шин передних и задних колес, значения тепловых составляющих давлений определяют как результат решения системы уравнений нагрева шин, рассмотренного выше.
Значения отклонений давлений от номиналов определяют как результат решения системы уравнений вращения колес относительно скоростей продольных скольжений колес. Значения скоростей продольных скольжений колес представляют в виде суммы истинных скоростей продольных скольжений и скоростей псевдоскольжений, которые определяют как произведения величин отклонений давлений от номинала и угловых скоростей вращения колес.
Отклонения давлений определяют как отношение произведений скоростей продольных скольжений колес и радиусов колес к скорости центра масс автомобиля при выполнении ограничения на величину неотрицательного продольного ускорения центра масс и величину модуля угла поворота управляемых колес. Ограничение ускорения задают из условия равенства нулю истинных скоростей продольных скольжений ведущих колес.
Для снижения влияния шумов измерений угловых скоростей вращения колес на результаты вычислений отклонений давлений, значения отклонений давлений фильтруют с помощью низкочастотного дискретного фильтра, из полученных значений определяют наименьшее и переопределяют значения отклонений давлений как разности предварительно вычисленных значений и наименьшего значения отклонения.
При выполнении допущения о существовании хотя бы одного колеса с нулевым отклонением давления от номинала получают значения давлений, совпадающие с их истинными значениями.
Уточненные значения радиусов колес RCi(0) при нулевых давлениях и значения износов кордов ΔRki шин определяют в режиме настройки давлений, который задают путем ввода команды настройки NT=1 при значениях истинных отклонений давлений от номиналов, близких к нулю.
Уточненные значения радиусов колес определяют численно как разности исходных значений радиусов колес и вычисленных значений отклонений давлений от номиналов.
Значения износов кордов шин определяют как сумму разностей уточненных значений радиусов колес и значений радиусов новых колес и разностей глубины протекторов новых шин и текущих значений глубины протекторов шин.
Значения величин модулей несоосностей |dxi| датчиков частот вращения колес и магнитов на ободах колес определяют как результат решения уравнений равновесия амплитуд напряжения импульсов датчиков частоты вращения колес и порогового значения напряжения устройства обнаружения сигналов на входе портов микропроцессора.
Зависимость амплитуды импульсов датчиков от линейной скорости вращения колес и величины несоосности представляют кривой типа «локона Аньези» с идентифицированными коэффициентами.
Идентификацию текущих значений физических переменных состояния органов управления автомобиля, в частности, номера передачи U1 КПП, положения дроссельной заслонки двигателя U2 и управляющего воздействия на тормозную систему U3, выполняют как решение обратной задачи динамики продольного движения автомобиля с идентифицированными параметрами и измеряемыми продольной скоростью и продольным ускорением центра масс.
Для решения задачи идентификации положения органов управления автомобилем вычисляют тяговое ускорение как решение уравнения продольного движения центра масс с известными ускорением аm, продольной скоростью Vm, давлениями Р1, Р2, Р3, Р4 и идентифицированными значениями kТр, kX, mo.
Если аm положительно, то определяют значения управляющих воздействий на дроссельную заслонку U2 как отношение тягового ускорения к наибольшим тяговым ускорениям, развиваемым на каждой передаче КПП.
Для значений U2, удовлетворяющих ограничениям на диапазон изменений U2, определяют значения наибольших скоростей движения на соответствующих передачах КПП как произведения максимальных скоростей движения на передачах и соответствующего значения U2. Значение номера передачи U1 КПП определяют как наименьшее из множества передач, для которых наибольшие скорости движения превосходит значение скорости центра масс Vm, а для КПП с ручным управлением дополнительно проверяют выполнение условия устойчивости разгона при наибольшем значении U2. Если приведенные условия не выполняются хотя бы для одной из передач или, если аm отрицательно, то текущее значение U1 определяют равным предыдущему значению.
Значение U2 определяют как результат решения уравнения тягового ускорения двигателя с известными значениями Vm и U1. Если решение для U2 не существует, то значение U2 устанавливают равным нижней границе диапазона U2, а состояние КПП определяют как нейтральное.
Значение управляющего воздействия U3 на тормозную систему определяют как отношение отрицательного произведения значения тягового ускорения и полной массы автомобиля к сумме коэффициентов усиления колесных тормозов, если КПП находится в нейтральном состоянии, и равным нулю в противном случае.
Значения максимальных коэффициентов трения скольжения колес  задают в режиме настройки параметров автомобиля в зависимости от марки шин, состояния дорожного покрытия, времени года и др.
задают в режиме настройки параметров автомобиля в зависимости от марки шин, состояния дорожного покрытия, времени года и др.
В случае исправного состояния датчиков частот вращения ведущих колес идентификацию текущих значений максимальных коэффициентов трения скольжения колес автомобиля выполняют для заднеприводного или переднеприводного автомобиля как решение уравнения тягового ускорения, определяемого силами трения скольжения ведущих колес, относительно коэффициентов трения скольжения. Зависимость коэффициентов трения скольжения от величины скольжения аппроксимируют кусочно-линейной функцией максимального коэффициента трения скольжения.
Значения максимальных коэффициентов трения скольжения определяют как решение одного из линейных уравнений аппроксимации при измеряемых скольжениях.
Значения максимальных коэффициентов трения скольжения ведомых колес определяют равными соответствующим коэффициентам ведущих колес того же борта.
Для снижения влияния шумов измерений скольжений колес и тягового ускорения на результаты идентификации выполняют фильтрацию полученных значений максимальных коэффициентов трения скольжения с использованием логической схемы контроля достоверности данных по диапазонам значений и диапазонам первой и второй производных.
Идентификацию числа магнитов Мi датчиков на ободах колес выполняют путем сравнения наибольшей из частот датчиков импульсов со значениями каждой из частот импульсов датчиков частот вращения колес.
Значение мощности двигателя WE определяют как произведение тяговой силы, равной произведению тягового ускорения на массу автомобиля, на скорость продольного движения центра масс и коэффициент преобразования значения мощности двигателя из ватт в лошадиные силы. Значение угла схождения управляемых колес ψs определяют как результат решения уравнения продольного движения центра масс на горизонтальной поверхности при нейтральном состоянии КПП и нулевом управляющем воздействии U3 на тормозную систему.
Значение объема израсходованного топлива BR определяют как результат решения уравнения энергетического баланса с идентифицированными параметрами преобразования энергии, измеряемой мощностью двигателя WE, передаваемой ведущим колесам, и мощностью WX, расходуемой на собственное потребление.
Мгновенное значения удельного расхода топлива BR (л/100 км) определяют как сумму слагаемых произведения модуля тяговой силы на идентифицированную константу и слагаемое, которое определяют в зависимости от текущего номера передачи КПП, параметров трансмиссии, радиусов ведущих колес, мощности холостого хода двигателя и коэффициента преобразования энергии.
Граничные значения физических переменных, характеризующих опасные состояния автомобиля, определяют следующим образом.
Граничное значение продольной скорости центра масс  определяют как наименьшую из группы граничных скоростей, включающих:
определяют как наименьшую из группы граничных скоростей, включающих:
 - верхняя граница скорости, задаваемая с учетом установленных правилами дорожного движения ограничений скорости в населенных пунктах, вне населенных пунктов и на автомагистралях;
- верхняя граница скорости, задаваемая с учетом установленных правилами дорожного движения ограничений скорости в населенных пунктах, вне населенных пунктов и на автомагистралях;
 - верхняя граница скорости разрыва корда шины с учетом значений износов кордов, давлений и марки шины;
- верхняя граница скорости разрыва корда шины с учетом значений износов кордов, давлений и марки шины;
 - верхняя граница скорости пробуксовки ведущих колес, определяемая с учетом параметров автомобиля и дорожного покрытия;
- верхняя граница скорости пробуксовки ведущих колес, определяемая с учетом параметров автомобиля и дорожного покрытия;
 - верхняя граница безопасной скорости прохождения виража, определяемая как минимальная из скоростей заноса задних колес, сноса передних колес и скорости опрокидывания автомобиля;
- верхняя граница безопасной скорости прохождения виража, определяемая как минимальная из скоростей заноса задних колес, сноса передних колес и скорости опрокидывания автомобиля;
 - верхняя граница безопасной скорости движения с установленным запасным колесом (докаткой) уменьшенного диаметра;
- верхняя граница безопасной скорости движения с установленным запасным колесом (докаткой) уменьшенного диаметра;
 - верхняя граница безопасной скорости движения, определяемая дополнительными углами развала колес.
- верхняя граница безопасной скорости движения, определяемая дополнительными углами развала колес.
Граничное значение управляющего воздействия U3Гр на тормозную систему определяют как наименьшее из граничных значений управляющих воздействий для каждого из колес и единицы.
Граничные значения управляющих воздействий для каждого из колес определяют из условия блокирования колеса при торможениях как отношение произведения массы автомобиля, приходящейся на колесо, ускорения свободного падения и максимального значения коэффициента трения скольжения колеса к сумме коэффициента усиления тормозов колеса и знакопеременного слагаемого, равного произведению половины значения максимального коэффициента трения скольжения колеса, динамического радиуса колеса, суммы коэффициентов усиления тормозов всех колес и обратного значения базы автомобиля.
Знакопеременное слагаемое положительно, если колеса задние, и отрицательно, если колеса передние.
Величину граничного тормозного замедления, возможного без блокировки колес, определяют как отношение произведения суммы коэффициентов усиления тормозов всех колес на граничное значение управляющего воздействия на тормозную систему к массе автомобиля. Граничное значение дистанции LS, необходимой для полной остановки перед неподвижным препятствием, определяют как сумму произведения продольной скорости центра масс на время запаздывания срабатывания тормозов и отношения половины квадрата продольной скорости центра масс к величине граничного тормозного замедления.
Граничное значение дистанции между попутными автомобилями Ld определяют как разность дистанции LS и половины квадрата продольной скорости центра масс к величине наибольшего возможного замедления попутного автомобиля.
Граничное значение положения дроссельной заслонки двигателя U2Гр определяют из условия отсутствия недопустимых пробуксовок ведущих колес равным отношению граничного тягового ускорения, определяемого силами трения скольжения ведущих колес, к наибольшему тяговому ускорению, развиваемому двигателем на текущей передаче КПП, если приведенное отношение тяговых ускорений не превышает единицу, и равным единице, если приведенное отношение тягового ускорений превышает единицу.
Граничные значения давлений газа или смеси газов в шинах автомобиля определяют в терминах верхних и нижних границ. Верхние границы давлений  определяют как наименьшие из граничных значений давлений разрыва корда шины и наибольших значений давлений при допустимой асимметрии осевых пар колес.
определяют как наименьшие из граничных значений давлений разрыва корда шины и наибольших значений давлений при допустимой асимметрии осевых пар колес.
Нижние границы давлений  определяют как наибольшие из граничных значений давлений проворачивания шины на ободе и наименьших значений давлений при допустимой асимметрии осевых пар колес.
определяют как наибольшие из граничных значений давлений проворачивания шины на ободе и наименьших значений давлений при допустимой асимметрии осевых пар колес.
Индикацию прогнозируемых превышений граничных значений физических переменных выполняют в тех случаях, когда прогнозируемые значения физических переменных превышают граничные значения физических переменных, характеризующих критические состояния автомобиля.
Так, индикатор превышения граничной скорости активируют, если прогнозируемое значение продольной скорости центра масс превышает прогнозируемую граничную скорость движения.
Индикатор превышения граничных значений давлений в шинах активируют, если значения давлений в одной или нескольких шинах превышают верхнюю границу давлений в этих шинах или если значения давлений в одной или нескольких шинах оказываются меньше, чем нижняя граница давлений в этих шинах.
Индикатор превышения температур перегрева шин активируют, если температура перегрева одной или нескольких шин превышает постоянное граничное значение температуры перегрева, которое задают в режиме настройки.
Индикатор превышения граничных значений продольных скольжений колес активируют, если величина модуля продольного скольжения одного или нескольких колес превышает граничное значение продольного скольжения, которое задают в режиме настройки.
Отображение значений физических переменных и их граничных значений выполняют попарно для скоростей центра масс, для углов поворота управляемых колес и для управляющих воздействий на дроссельную заслонку и тормоза.
В качестве начального режима отображения задают режим отображения граничных дистанций до попутного препятствия и дистанции, необходимой для полной остановки.
Управление режимами отображения физических переменных выполняют так, чтобы уменьшить время запаздывания между моментами времени активации индикации опасных состояний и отображения значений физических переменных, превысивших граничные значения критических состояний.
Так, переход в режим отображения скоростей центра масс и его граничных значений из начального режима выполняют при воздействии на клавишу, расположенную под индикатором превышения безопасной скорости, за один шаг. Переход в режим отображения давлений газа или смеси газов в шинах автомобиля из начального режима отображения выполняют при нажатии на клавишу, расположенную под индикатором превышения границ давлений, также за один шаг.
Переход в режим отображения температур перегрева шин из начального режима отображения выполняют при нажатии на клавишу, расположенную под индикатором превышения граничного значения температуры перегрева, также за один шаг.
Формирование управляющих воздействий на дроссельную заслонку, тормоза и рулевое колесо выполняют с целью сокращения интервала времени пребывания транспортного средства в опасных состояниях, создающих угрозу столкновений с препятствиями.
Опасные технические неисправности определяют на ранних стадиях их развития, что позволяет увеличить временной интервал для выбора места вынужденной остановки, не представляющей опасности для движения.
Пример.
В качестве примера рассматривается переднеприводной автомобиль с параметрами: а=1.43 м, b=2.58 м, kX=0.52H·c2·м-2, mO=1240 кг,  RC1(0)=302.25 мм, RC2(0)=301.00 мм, RC3(0)=301.20 мм, RC4(0)=300.08 мм, hP1=7.5 мм, hP2=6.5 мм, hP3=7.5 мм, hP4=6.9 мм, hP1H=8.0 мм, hP3н=8.0 мм, RC1H(0)=302.00 мм, RC13H(0)=301.00 мм k31=k32=3600H, k33=k34=700H, kРЕД=3.9, kП(1)=3.309, kП(2)=2.05, kП(3)=1.367, kП(4)=0.946, kП(5)=0.732, WДВ=76 л.с. hm=0.7 м,
RC1(0)=302.25 мм, RC2(0)=301.00 мм, RC3(0)=301.20 мм, RC4(0)=300.08 мм, hP1=7.5 мм, hP2=6.5 мм, hP3=7.5 мм, hP4=6.9 мм, hP1H=8.0 мм, hP3н=8.0 мм, RC1H(0)=302.00 мм, RC13H(0)=301.00 мм k31=k32=3600H, k33=k34=700H, kРЕД=3.9, kП(1)=3.309, kП(2)=2.05, kП(3)=1.367, kП(4)=0.946, kП(5)=0.732, WДВ=76 л.с. hm=0.7 м,
 , вводимыми в режиме настройки.
, вводимыми в режиме настройки.
Представим зависимость истинного пути L1(t), пройденного 1-м колесом, от времени t в виде аналитической функции:

что соответствует случаю вращения колес с постоянной скоростью V1(0) на интервале времени (0÷t1) и вращению с постоянным ускорением a1 на интервале времени (t1÷t2).
Истинная скорость вращения V1(t) изменяется в соответствии с уравнением:

Истинные приращения пути ΔL1(k)=L1(k)-L1(k-1) в дискретные моменты времени t=tk=kΔT, ΔT=1с составляют при Vi(0)=14 м·c-1, t1=10 c, t2=15 c, a1=1м·с-2 соответственно ΔL1(1)=ΔL1(2)=...=ΔL1(10)=14 м, ΔL1(11)=14.5 м, ΔL1(12)=15.5 м, ΔL1(13)=16.5 м, ΔL1(14)=17.5 м, ΔL1(15)=18.5 м.
Истинные значения скорости вращения V1(t) в дискретные моменты времени составляют: V1(1)=V1(2)=...=V1(10)=14м·c-1, V1(11)=15 м·с-1, V1(12)=16 м·с-1, V1(13)=17 м·c-l, V1(14)=18 м·c-l, V1(15)=19 м·c-l.
Вычисленный радиус колеса RC1 при RC1(0)=302.25 мм, P1H=2 бара, ΔРT1=0.10 бар, mT=7 кг, lТ=175 мм, V1(k-1)=14 м·с-1, kP=1 мм·бар-1 составляет 304.48 мм.
Числа импульсов  датчика, определяемые с помощью линейной интерполяции в начале и в конце шага вычислений ΔT=1 с, составляют при М1=2 соответственно:
датчика, определяемые с помощью линейной интерполяции в начале и в конце шага вычислений ΔT=1 с, составляют при М1=2 соответственно:





Вычисленные значения приращений пути равны:
ΔL1(1)=ΔL1(2)=...=ΔL1(10)=14.000 м, ΔL1(11)=14.499 м, ΔL1(12)=15.500 м, ΔL,(13)=16.499 м, ΔL1(14)=17.500 м, ΔL1(15)=18.499 м.
Вычисленные значения ускорения колеса составляют:
а1(1)=а1(2)=...=а1(10)=0.000 м·с-2, а1(11)=0.499 м·с-2, а1(12)=1.001 м·с-2,
а1(13)=0.999 м·с-2, а1(14)=0.001 м·с-2, а1(15)=0.999 м·с-2.
Вычисленные значения скорости вращения при частоте опроса портов микроконтроллера fc=5000 Гц равны:
V1(1)=V1(2)=...=V1(10)=14.000м·с-1, V1(11)=14.748 м·с-1,
V1(12)=16.000 м·с-1, V1(13)=16.998 м·с-1, V1(14)=18.000 м·с-1, V1(15)=18.998 м·с-1 и совпадают, в пределах отбрасываемых младших разрядов, с истинными значениями скорости вращения, кроме V1(11) в момент времени изменения ускорения от нуля до 1 м·с-2. Аналогичным образом вычисляют скорости вращения всех остальных колес.
Продольная скорость центра масс Vm, угол поворота управляемых колес ψc, скорости продольных скольжений колес ΔVS1, ΔVS2, ΔVS3, ΔVS4, продольные аm и поперечные аq ускорения центра масс и пройденный путь Lm вычисляют по найденным значением скоростей вращения колес V1, V2, V3, V4.
Допустим, что V1=14.000 м·c-1; V2=13.706 м·с-1; V3=14.000 м·с-1, V4=13.692 м·с-1. Полусуммы скоростей вращения осевых и диагональных пар колес равны:
0.5(V1+V2)=13.853 м·с-1; 0.5(V3+V4)=13.846 м·с-1;
0.5(V1+V4)=13.846 м·с-1; 0.5(V2+V3)=13.853 м·с-1;
Модули разности полусумм скоростей вращения пар колес и скорость центра масс Vm(k-1) на предыдущем шаге, равной 13.846 м·с-1, составляют:
Е12=0.007 м·с-1 E34=0.000 м·с-1, E14=0.000 м·с-1, Е23=0.007 м·с-1.
Минимальное значение модуля разностей соответствует паре колес 3,4 (E34=0.000 м·с-1).
Вычисляемые значения скорости центра масс Vm=13.846 м·с-1, продольного ускорения аm=0.000 м·с-2 и угла поворота управляемых колес ψc=0.040 радиан.
Скорости продольных скольжений колес составляют:
ΔVS1=0.000 м·с-1, ΔVS2=0.013 м·с-1, ΔVS3=0.000 м·с-1, ΔVS1=0.000 м·с-1.
Поперечное ускорение центра масс аq=2.972 м·с-2, а пройденный путь Lm(k)=1013.846 м при Lm(k-1)=1000.000 м.
Вычисленные значения температур перегрева шин для установившегося режима движения с постоянной скоростью центра масс Vm=13.846 м·с-1, ψс=0.040 радиан и  при идентифицированном коэффициенте теплообмена шин Сo≈50 Вт·град-1 составляют:
при идентифицированном коэффициенте теплообмена шин Сo≈50 Вт·град-1 составляют:
ΔТ1(k)=13.7 град C, ΔT2(k)=13.9 град С, ΔT3(k)=8.4 град С, ΔT1(k)=8.2 град С.
Вычисленные тепловые составляющие давлений при температуре окружающей среды, равной 0 град С, составляют:
ΔРT1=0.10 бар, ΔРT2=0.10 бар, ΔРT3=0.06 бар, ΔРT4=0.06 бар.
Вычисленные отклонения давлений от номиналов при аm(k)=0.0 м·с-2 равны:
ΔP1(k)=0.00 бар, ΔP1(k)=0.28 бар, ΔP3(k)=0.00 бар, ΔP4(k)=0.00 бар.
Значения давлений в шинах составляют:
P1(k)=2.10 бар, P2(k)=1.82 бар, P3(k)=2.06 бар, ΔP4(k)=2.06 бар.
В режиме настройки давлений (NT=1) при истинных отклонениях давлений, равных нулю, переопределится значение RC2(0)=300.72 мм, а износы кордов шин определяться равными: ΔRk1=0.75 мм, ΔRk2=0.50 мм, ΔRk3=0.70 мм, ΔRk4=0.18 мм.
Идентификацию максимальных значений  , коэффициентов трения скольжения ведущих колес рассмотрим для случая:
, коэффициентов трения скольжения ведущих колес рассмотрим для случая:
V1(k)=15.883 м·c-1, V2(k)=15.620 м·c-1, V3(k)=15.500 м·c-1, V4(k)=15.160 м·c-1,
Vm(k)=15.330 м·с-1, аm(k)=1.0 м·с-2, ψC(k)=0.04 радиан. Скорости продольных скольжений колес ΔVS1=0.383 м·с-1, ΔVS2=0.460 м·с-1, скольжение S1=0.025, S2=0.030. Для участка кусочно-линейной аппроксимации при 0<Si≤0.16  значения
значения 


При Vm=15.0 м·c-1, am=1.0 м·с-2 идентифицированные значения U1=3, U2=0.845, U3=0.00, вычисленные значения мощности двигателя и мгновенного удельного расхода топлива составляют соответственно 31.2 л.с. и 22.35 л/100 км.
При Vm=15.0 м·с-1 и аm=0.0 м·с-2 идентифицированные значения U1=3, U2=0.467 и U3=0.00, значения мощности двигателя и удельного расхода топлива составляют 5.67 л.с. и 6.07 л/100 км.
Значения граничных скоростей для рассматриваемого состояния автомобиля, в частности, Vm=15.0 м·с-1, аm=1.0 м·с-2, ψс=0.04 радиан составляют:





Минимальное значение  а прогнозируемое значение Vm при τэ=1 с составляет 16.0 м·с-1, что вызывает активацию индикатора превышения безопасной скорости.
а прогнозируемое значение Vm при τэ=1 с составляет 16.0 м·с-1, что вызывает активацию индикатора превышения безопасной скорости.
Верхние и нижние границы давлений в шинах при допустимой асимметрии 0.2 бар равны:






При значениях P1=2.10 бар, Р2=1.82 бар, P3=2.06 бар, P4=2.06 бар фиксируют превышение верхней границы давления в первой шине и нижней границы давления во второй шине, что вызывает активацию индикатора опасных значений давлений.
При граничных значениях температуры перегрева шин 80 град С и скольжений колес 0.16 превышение границ температур перегрева шин и продольных скольжений колес не происходит и индикаторы опасных температур и скольжений не активируются.
Граничное значение управляющего воздействия на тормозную систему U3Гр=0.584. Величина наибольшего тормозного замедления aT=4.05 м·с-2.
Величина граничной дистанции, необходимой до полной остановки, при τm=0.8 с составляет LS=27.8 м. Величина граничной дистанции до попутного автомобиля при аПР=10 м·с-2 равна Ld=16.5 м. Граничное значение управляющего воздействия на дроссельную заслонку при движении на 3-й передаче U2Гр=1.0.
Последовательность действий водителя в рассматриваемом случае сводится к уменьшению управляющего воздействия на дроссельную заслонку, приводящему к уменьшению продольного ускорения аm, например, до нуля при U2≈0.467. В этом случае, прогнозируемое значение Vm на следующем шаге окажется равным 15.0 м·с-1, а граница безопасной скорости при ψc=0.04 радиан останется на уровне 15.5 м·с-1, индикатор превышения безопасной скорости перейдет в неактивированное состояние.
Воздействие на клавишу, логически сгруппированную с активированным индикатором опасных значений давлений, вызовет переход в режим отображения значений давлений в шинах. Оценив значения давлений и динамику их изменений, водитель может продолжить движение до безопасного места для вынужденной остановки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДОТВРАЩЕНИЯ АВАРИЙНОГО ПЕРЕГРЕВА ШИН И ТОРМОЗОВ АВТОМОБИЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2513439C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ СКОРОСТИ ДРИФТА КОЛЕС АВТОМОБИЛЯ | 2018 |
|
RU2717121C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СНОСА И ЗАНОСА КОЛЕС АВТОМОБИЛЯ | 2018 |
|
RU2702878C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ОПРОКИДЫВАНИЯ АВТОМОБИЛЯ | 2018 |
|
RU2702476C1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ ОПРОКИДЫВАНИЯ АВТОМОБИЛЯ | 2018 |
|
RU2702877C1 |
| Способ определения угловой скорости дополнительного рыскания колёс автопоезда | 2023 |
|
RU2812026C1 |
| Способ идентификации максимальных значений коэффициентов трения скольжения колёс транспортного средства | 2022 |
|
RU2779539C1 |
| СИСТЕМА КОНТРОЛЯ И ПРЕДОТВРАЩЕНИЯ ДРИФТА КОЛЕС АВТОМОБИЛЯ | 2018 |
|
RU2700209C1 |
| Способ управления движением беспилотных транспортных средств (БТС) в колонне и/или отдельных БТС и мониторинга интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог | 2019 |
|
RU2725569C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2737069C1 |

Группа изобретений относится к технике повышения безопасности транспортных средств. В предложенном способе регистрируют импульсы от датчиков частот вращения колес и подают их на вход блока обработки информации. По значениям частот вращения колес определяют в реальном времени значения физических переменных, характеризующих состояние автомобиля, и граничные значения физических переменных. На выходе блока обработки информации формируют сигнал с информацией о приближении физических переменных, характеризующих состояние автомобиля, к граничным значениям или их превышении. В зависимости от значений физических переменных и граничных значений физических переменных, характеризующих состояние автомобиля, формируют сигнал с управляющим действием, предотвращающим столкновения автомобиля с препятствиями. Предложенная система содержит датчики частот вращения колес. Блок обработки информации включает микропроцессор, выполненный с возможностью идентификации состояния датчиков частот вращения колес, определения в реальном времени по значениям частот вращения колес значений физических переменных, характеризующих состояние автомобиля, граничных значений физических переменных и формирования сигнала с информацией о приближении значений упомянутых физических переменных к граничным значениям или их превышении. Группа изобретений позволяет предотвращать типовые столкновения, достигаемые в минимальной конфигурации используемых технических средств за счет динамической стабилизации физических переменных, характеризующих состояние автомобиля. 2 н. и 4 з.п. ф-лы, 3 ил.
| УСТРОЙСТВО ОГРАНИЧЕНИЯ СКОРОСТИ АВТОМОБИЛЯ В ЗАВИСИМОСТИ ОТ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК В БОКОВОМ ДВИЖЕНИИ | 2004 |
|
RU2261188C1 |
| АВТОМОБИЛЬНАЯ БОРТОВАЯ ИНФОРМАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2268829C2 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА БЕЗОПАСНОСТЬЮ ДВИЖЕНИЯ АВТОМОБИЛЬНОГО ТРАНСПОРТА | 2000 |
|
RU2193233C2 |
| СПОСОБ УПРАВЛЕНИЯ АГРЕГАТАМИ ТРАНСПОРТНОГО СРЕДСТВА В ДИНАМИЧЕСКОМ РЕЖИМЕ | 1997 |
|
RU2102258C1 |

