Область техники
Изобретение относится к способу наладки и эксплуатации погрузочной платформы. Кроме того, изобретение относится к системе управления погрузочной платформой, предназначенной для использования в рамках этого способа, погрузочной платформе с такой системой управления и перевалочному пункту с такой погрузочной платформой.
Уровень техники
Погрузочными рампами оснащают станции для загрузки и разгрузки транспортных средств, контейнеров и т.п., причем погрузочные рампы служат, в частности, для адаптации рампы или иного подобного перевалочного пункта к различным платформам транспортных средств или иных транспортных контейнеров различной высоты. Как правило, для этого в качестве погрузочных рамп применяют простые подъемные площадки без регулировки длины, выдвижные погрузочные рампы или погрузочные рампы с подъемной кромкой.
Погрузочная рампа с подъемной кромкой и способ ее эксплуатации раскрыты, например, в патентном документе DE 7918512 U1.
Обзор различных погрузочных рамп, используемых для них ворот, возможных способов устройства перевалочных станций с несколькими перевалочными пунктами и способа наладки и эксплуатации погрузочных платформ для этих пунктов приведен в рекламном проспекте «Погрузочно-разгрузочное оборудование - комплексные решения для повышения эффективности» компании Hörmann KG, вышедшем из печати в августе 2011 года.
В патентном документе DE 9102364 U1 описано использование сигнала состояния покоя, генерируемого при укладке погрузочной рампы на опору, для управления электрическими компонентами погрузочной рампы с подъемной кромкой, например, электромагнитными клапанами, и их отключения, что позволяет увеличить срок службы этих элементов.
В патентном документе EP 0884477 A2 описана система управления погрузочной платформой с применением аккумуляторов энергии.
В патентном документе US 2005/0028723 A1 описано подключение системы управления погрузочной платформы к системе управления ворот.
В патентном документе DE 102010011325 A1 описан способ эксплуатации погрузочной рампы, предусматривающий отключение первой группы электрических потребителей, включая привод рампы, при сохранении готовности к работе второй группы электрических потребителей, в состав которой входит часть элементов ввода или вывода.
Представленные на рынке погрузочные рампы (см. вышеуказанную брошюру компании Hörmann KG) оснащают гидравлическими приводами. Для подъема и опускания погрузочных рамп на уровне техники применяют подъемные цилиндры, управляемые, как правило, регулирующими клапанами. Гидравлическое давление нагнетают источником давления, выполненным в виде гидравлического насоса с электродвигателем. Для подъема и опускания переключают регулирующие клапаны, направляющие гидравлическое масло в гидравлический цилиндр или отводящие гидравлическое масло от него. В качестве регулирующих клапанов часто используют электромагнитные клапаны. Такой регулирующий клапан открывается, как правило, путем подачи энергии на соленоид или любую другую катушку, в результате чего возникает магнитное поле, открывающее толкатель клапана. Чтобы удержать электромагнитный клапан в открытом состоянии, необходимо, как правило, поддерживать магнитное поле. Поэтому открытые электромагнитные клапаны, как правило, отличаются высоким потреблением энергии.
Поэтому, по существу, уже известно (патентные документы DE 102010011325 A1 и, в частности, DE 9102364 U1) отключение электромагнитных клапанов в то время, когда рампа находится в состоянии покоя.
В погрузочной рампе с подъемной кромкой, раскрытой в патентном документе DE 9102364 U1, складная кромка в состоянии покоя прилегает к опоре на передней свободной оконечности погрузочной платформы и, таким образом, поддерживает погрузочную платформу даже в том случае, если гидравлический привод не работает вследствие отключения электромагнитных клапанов. Такая возможность поддержки значительно ограничивает свободу конструирования, конфигурирования и эксплуатации погрузочной рампы.
Раскрытие изобретения
Задачей настоящего изобретения является разработка погрузочной платформы, которая будет отличаться большей свободой конструирования и конфигурирования, а также значительной экономией ресурсов по сравнению с ранее предложенными решениями.
Эту задачу решают способом с признаками, раскрываемыми в пункте 1 формулы изобретения. Система управления погрузочной платформой, предназначенная для использования в рамках этого способа, а также использование таких систем управления погрузочными платформами раскрыты в зависимых пунктах формулы.
Предпочтительные варианты исполнения изобретения раскрыты в зависимых пунктах формулы изобретения.
Первый аспект настоящего изобретения относится к способу наладки и эксплуатации погрузочной платформы, содержащей по меньшей мере одну погрузочную рампу на перевалочной станции, по меньшей мере один подъемный цилиндр, источник давления, регулирующий клапан для подъемного цилиндра, предназначенного для подъема погрузочной рампы, и систему управления погрузочной платформой, предназначенную для активации регулирующего клапана, причем для наладки погрузочной платформы определяют, возможна ли на перевалочной станции транспортировка грузов с массой, превышающей пороговое значение нагрузки, по погрузочной рампе в поперечном направлении, причем система управления погрузочной платформой обеспечивает:
a) в случае, если такая транспортировка грузов с массой, превышающей пороговое значение нагрузки, в поперечном направлении возможна, переключение регулирующего клапана в нагруженном состоянии и в состоянии покоя погрузочной рампы в открытое положение и удержание в этом положении для удержания и/или перемещения погрузочной рампы, и
b) в случае, если такая транспортировка грузов в поперечном направлении невозможна, то есть либо транспортировка грузов в поперечном направлении невозможна вообще, либо возможна лишь транспортировка в поперечном направлении грузов с массой, не достигающей порогового значения нагрузки, переключение в режим экономии энергии, в котором регулирующий клапан обесточен и закрыт, или в режим удержания и работы, в котором регулирующий клапан запитан и открыт для подъема или удержания погрузочной рампы посредством подъемного цилиндра,
причем при работе согласно варианту b) определяют по меньшей мере один параметр, указывающий на состояние покоя или нагруженное состояние, и в зависимости от этого устанавливают в состоянии покоя режим экономии энергии, а в нагруженном состоянии - режим удержания и работы.
Происходящее при возможности такой транспортировки в поперечном направлении грузов с массой на уровне порогового значения нагрузки можно не рассматривать, так как это, с одной стороны, маловероятно, а с другой стороны, в этом случае можно использовать любой из вариантов a) или b).
Предпочтительно в качестве параметра, указывающего на состояние покоя или нагруженное состояние, определяют положение, в частности, конечное положение, одних из ворот перевалочной станции, относящихся к погрузочной рампе.
Предпочтительно переключение из режима экономии энергии в режим удержания и работы осуществляют после того, как будет обнаружено, что ворота находятся в конечном открытом положении.
Предпочтительно переключение из режима удержания и работы в режим экономии энергии осуществляют после того, как будет обнаружено,
c) что ворота не находятся в конечном открытом положении или покинули открытое конечное положение, или
d) что ворота находятся в конечном закрытом положении или достигают его.
Предпочтительно пороговое значение нагрузки для принятия решения о допустимости режима экономии энергии выбирают в зависимости от максимально допустимой нагрузки на погрузочную рампу, находящуюся в состоянии покоя.
Согласно другому аспекту, изобретение относится к системе управления погрузочной платформой, предназначенной для использования в вышеописанном способе, причем система управления погрузочной платформой выполнена с возможностью активации по меньшей мере одного регулирующего клапана для подъемного цилиндра погрузочной рампы, причем система управления погрузочной платформой обеспечивает удержание по меньшей мере одного регулирующего клапана в обесточенном закрытом состоянии в режиме экономии энергии, или в запитанном открытом состоянии в режим удержания и работы, при этом система управления погрузочной платформой содержит устройство блокировки режима экономии энергии, предназначенное для предотвращения включения режима экономии энергии при наладке погрузочной платформы.
Система управления погрузочной платформой может быть выполнена таким образом, чтобы она учитывала положение соответствующих ворот. Предпочтительно эту функцию можно регулировать с помощью регулятора настройки положения ворот, например, переключателя, в частности, двухпозиционного переключателя, настроечного меню или иных регулировочных устройств.
Согласно следующему аспекту, изобретение относится к погрузочной платформе для использования в одном из описанных выше способов, содержащей по меньшей мере одну погрузочную рампу, по меньшей мере один подъемный цилиндр, предназначенный для подъема погрузочной рампы, по меньшей мере один регулировочный клапан и источник давления для приведения в действие подъемного цилиндра, и систему управления погрузочной платформой указанного выше типа.
Согласно следующему аспекту, изобретение относится к перевалочной станции с такой погрузочной платформой, причем система управления погрузочной платформой выполнена или настроена таким образом, чтобы, для погрузочной рампы, для которой транспортировка грузов с массой, превышающей заданную пороговую нагрузку, в поперечном направлении невозможна и/или не предусмотрена, в состоянии покоя погрузочной рампы обеспечивать выбор режима экономии энергии, а для погрузочной рампы, для которой транспортировка грузов с массой, превышающей заданную пороговую нагрузку, в поперечном направлении возможна и/или предусмотрена, запретить выбор режима экономии энергии.
В имеющихся на рынке погрузочных рампах (см., например, упомянутый выше буклет компании Hörmann KG «Погрузочно-разгрузочное оборудование», вышедший из печати в августе 2012 года) клапаны гидравлического цилиндра погрузочной рампы, как правило, находятся под напряжением и, тем самым, поддерживаются в открытом состоянии даже в состоянии покоя погрузочной рампы, чтобы исключить повреждение погрузочной рампы, гидравлических цилиндров или блоков клапанов при возможной транспортировке грузов в поперечном направлении. Существуют, в частности, перевалочные станции с внутренними погрузочными рампами, которые в состоянии покоя находятся на том же уровне, что и пол станции. По таким погрузочным рампам вильчатые погрузчики, другие напольные транспортные средства или иные подобные транспортеры могут перемещаться как в продольном направлении для перевалочных работ, так и в поперечном направлении. При перевалочных работах погрузочные рампы поддерживаются гидравлическими цилиндрами, которые активируются электромагнитными клапанами и компенсируют смещение рампы по вертикали. Если в состоянии покоя клапаны будут закрыты, гидравлические цилиндры будут заблокированы. Если теперь транспортер, перемещающий грузы, например, по складу, будет перемещаться по погрузочной рампе в направлении, перпендикулярном направлению погрузки грузов в грузовой автомобиль, это может привести к повреждениям (в зависимости от массы груза, перемещаемого в поперечном направлении).
Деформация поверхности погрузочной рампы при перемещении значительных масс, составляющая в упругой области до нескольких миллиметров, может привести, например, к следующим повреждениям:
- в гидравлических цилиндрах вследствие деформации развивается очень большое давление, повреждающее гидравлический цилиндр или соединенные с ним блоки клапанов;
- область соединения цилиндров с погрузочной платформой может быть продавлена листом поверхности погрузочной платформы, например, обычно используемым рифленым листом, результатом чего станут пластические деформации.
С технической точки зрения обе эти проблемы можно решить, увеличив гидравлические цилиндры или применив более жесткую и стабильную конструкцию.
Однако эти решения неизбежно приведут к повышению затрат на материалы.
В настоящее время часто встречаются перевалочные станции, на которых отсутствует транспортировка грузов в поперечном направлении или сама возможность такой транспортировки. Например, существуют погрузочные рампы в выдвинутых тамбурах перед складом, по которым транспортные средства могут перемещаться только в направлении погрузки.
Предпочтительный вариант исполнения изобретения предусматривает программирование перевалочных станций, например, перевалочных центров, на которых отсутствует транспортировка грузов в поперечном направлении или возможна транспортировка в поперечном направлении только грузов небольшой массы, на режим экономии энергии. На погрузочных рампах (возможно, всего лишь на одной из множества имеющихся в перевалочном центре), на которых можно ожидать транспортировки в поперечном направлении грузов большой массы, систему управления погрузкой настраивают таким образом, чтобы клапаны оставались открытыми даже в состоянии покоя погрузочной рампы. Таким образом, давление, обусловленное высокой нагрузкой при транспортировке грузов в поперечном направлении или подобными причинами, можно компенсировать открытыми клапанами; погрузочную рампу поддерживают с компенсацией вертикального смещения, то есть в плавающем положении.
Пороговое значение нагрузки для ожидаемой транспортировки грузов в поперечном направлении, начиная с которого допускается или не допускается режим экономии энергии, может меняться в зависимости от типа и конструкции погрузочной рампы. Поскольку максимально допустимая нагрузка может изменяться в зависимости от величины погрузочной рампы, в документации к погрузочной рампе предпочтительно указана максимально допустимая масса для транспортировки грузов в поперечном направлении.
В особенно предпочтительном варианте исполнения изобретения система управления погрузочной платформой имеет возможность отключать или не отключать питание клапанов гидравлических цилиндров в состоянии покоя погрузочной рампы. Монтажники могут реализовать эту возможность, например, с помощью меню, переключателя, например, простого DIP-переключателя ВКЛ/ВЫКЛ, или иного устройства при настройке простого в использовании интерфейса ввода системы управления погрузочной платформой.
В режиме экономии энергии клапаны закрывают в положении покоя погрузочной рампы. В результате гидравлические клапаны не потребляют энергию в режиме ожидания. Это может привести к значительной экономии энергии, в частности, при использовании электромагнитных клапанов.
В режиме удержания и работы клапаны остаются открытыми. В частности, при использовании электромагнитных клапанов это приводит к высокому энергопотреблению в режиме ожидания; с другой стороны, давление в гидравлическом цилиндре, обусловленное нагрузкой на погрузочную рампу, можно отводить и компенсировать при помощи открытых клапанов, то есть появляется возможность компенсации даже деформаций в упругой области без повреждения погрузочной рампы. В частности, в этом режиме удержания и работы можно поддерживать погрузочные рампы с компенсацией вертикального смещения. В результате даже в том случае, если можно ожидать транспортировки в поперечном направлении грузов повышенной массы, можно использовать погрузочные рампы с гидравлическими цилиндрами меньшего размера или менее стабильные и тяжелые конструкции. Кроме того, можно оптимизировать потребление энергии перевалочной станцией, так как клапаны остаются открытыми с целью компенсации нагрузок только там, где может происходить транспортировка грузов в поперечном направлении.
Предпочтительно отключение питания (режим экономии энергии) возможно только параллельно с получением сообщения о переходе в конечное положение ворот, относящихся к погрузочной рампе. В предпочтительном варианте исполнения изобретения предусмотрены, например, следующие варианты:
1. Система управления погрузочной платформой может обрабатывать только сигнал конечного положения «ВОРОТА ОТКРЫТЫ» (открытое конечное положение), и имеет место сообщение о конечном положении «ВОРОТА ОТКРЫТЫ». В этом случае клапаны остаются открытыми или открываются; это относится даже к состоянию покоя погрузочной рампы. В этом случае предполагают, что может происходить погрузка или разгрузка грузового автомобиля или иной подобный процесс.
2. Система управления погрузочной платформой может обрабатывать только сигнал конечного положения «ВОРОТА ОТКРЫТЫ», причем сообщение о конечном положении «ВОРОТА ОТКРЫТЫ» отсутствует. В этом случае клапаны остаются закрытыми или закрываются. В этом случае погрузочную рампу и без того нельзя перемещать, так как во многих системах управления перевалочными станциями ворота и соответствующая погрузочная рампа блокируются относительно друг друга, и погрузочную рампу можно приводить в действие только при наличии сообщения о конечном положении «ВОРОТА ОТКРЫТЫ».
3. Система управления погрузочной платформой может обрабатывать только сигнал конечного положения «ВОРОТА ЗАКРЫТЫ» (закрытое конечное положение), и имеет место сообщение о конечном положении «ВОРОТА ЗАКРЫТЫ». В этом случае клапаны остаются закрытыми или закрываются.
Иногда, при работе с полностью загруженным грузовым автомобилем, нет возможности уложить кромку погрузочной рампы на дно кузова грузового автомобиля, поэтому вся нагрузка при соответствующем перегрузочном процессе первоначально должна восприниматься самой погрузочной рампой. Таким образом, зачастую первый поддон при разгрузке и последний поддон при погрузке можно перемещать только в положении покоя, а не в плавающем положении погрузочной рампы. Чтобы предусмотреть и этот случай, в особенно предпочтительном варианте исполнения изобретения дополнительно запрашивают положение ворот, и при открытых воротах программное обеспечение блокирует закрытие клапанов даже тогда, когда погрузочная рампа находится в режиме экономии энергии. В погрузочных рампах, известных на уровне техники, в режиме экономии энергии клапаны подъемных цилиндров, как правило, обесточены и, как правило, закрыты, когда погрузочная рампа находится в состоянии покоя. Тем не менее, исследования, проведенные на таких погрузочных рампах, показали наличие описанных выше проблем при высоких нагрузках, в частности, вследствие транспортировки тяжелых грузов в поперечном направлении.
Описываемый изобретением способ и устройства для осуществления этого способа позволяют, в частности, получить стандартную стабильную и недорогую конструкцию погрузочной рампы, так как транспортировка тяжелых грузов в поперечном направлении происходит или требуется редко. Для тех погрузочных рамп, где транспортировка грузов в поперечном направлении все же возможна, можно компенсировать нагрузку, отключив возможность включения режима экономии энергии или иным образом заблокировав режим экономии энергии. Только в том случае, если оператор перевалочной станции захочет сэкономить энергию в режиме ожидания и дополнительно обеспечить возможную транспортировку тяжелых грузов в поперечном направлении, потребуется разработать и установить погрузочные рампы с более сложной и, следовательно, более дорогой конструкцией, отличающейся усиленными цилиндрами или повышенной жесткостью.
Таким образом, по существу, применение описываемого изобретением способа или его предпочтительных вариантов позволяет изготавливать и устанавливать погрузочные рампы массовыми промышленными сериями, простыми регулирующими мерами устраняя необходимость в не таких уж и малых затратах на материалы и усложненную конструкцию, в том числе, затратах на транспортировку более тяжелых погрузочных платформ и затратах на более сложный монтаж.
Предпочтительно описываемая изобретением система управления погрузочной платформой содержит программируемую функцию экономии энергии.
Функция экономии энергии может быть связана с системой управления воротами, что позволяет выполнять активацию или отключение в зависимости от положения ворот.
Некоторые перевалочные рампы с системой управления оснащены датчиками, посредством которых реализуют обратную связь по положению погрузочной рампы. Например, предусмотрен первый инициатор и второй инициатор, причем первый инициатор, в случае погрузочной рампы с подъемной кромкой, подает сигнал, когда кромка сложена, а в случае выдвижной погрузочной рампы подает сигнал, когда выдвижная кромка втянута, причем второй инициатор подает сигнал, когда плита погрузочной рампы находится в состоянии покоя.
В этом случае, если доступна обратная связь по положению погрузочной рампы, можно привязать функцию экономии энергии к фактическому положению покоя погрузочной рампы. Включением или выключением функции экономии энергии можно управлять с помощью сигналов этих датчиков положения. В отсутствие подобных датчиков можно связать, например, включение режима экономии энергии с сигналом отведения погрузочной рампы. Например, после нажатия кнопки автоматического возврата, инициирующего перевод погрузочной рампы в положение покоя, режим экономии энергии будет включаться по истечении предохранительного периода времени. Вследствие различения параметров, например, вязкости гидравлического масла и т.п., не всегда можно точно предсказать момент времени, в который погрузочная рампа после нажатия кнопки автоматического возврата на самом деле переместится в положение покоя. При наличии датчиков, определяющих положение покоя, можно будет обойтись без предохранительного периода времени.
Краткое описание чертежей
Варианты исполнения изобретения будут детально разъяснены ниже со ссылкой на прилагаемые чертежи, на которых изображено:
Фигура 1 - вид в аксонометрии перевалочного пункта с расположенной внутри здания погрузочной рампой, в данном случае выполненной в виде погрузочной рампы с подъемной кромкой.
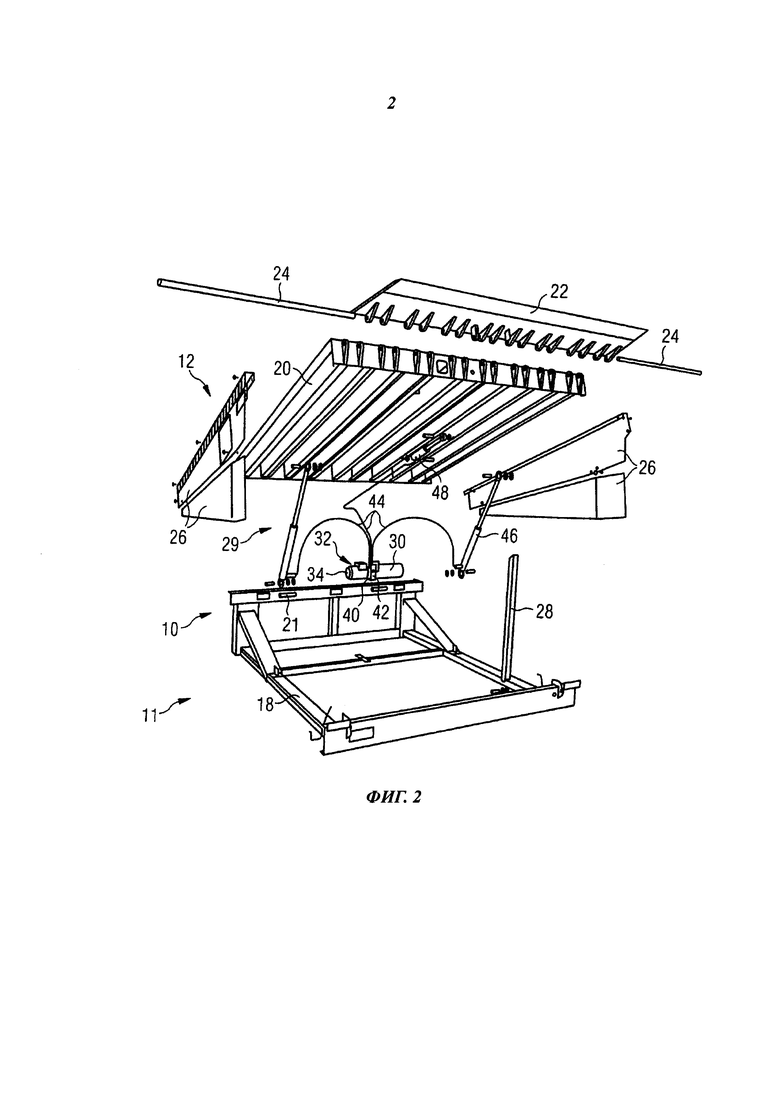
Фигура 2 - вид в аксонометрии в разобранном виде отдельных частей погрузочной рампы с подъемной кромкой (см. фигуру 1).
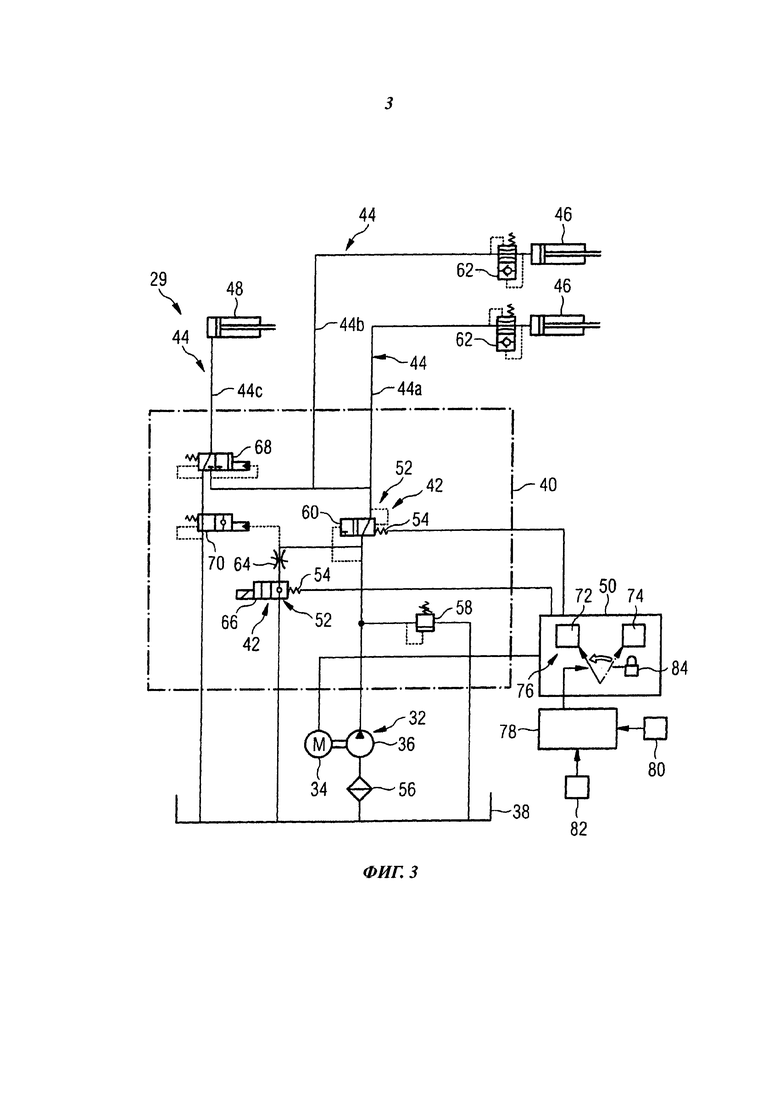
Фигура 3 - схематичная блок-схема гидравлического управления погрузочной рампой с подъемной кромкой, показанной на фигурах 1 и 2, с указанной системой управления погрузочной платформой.
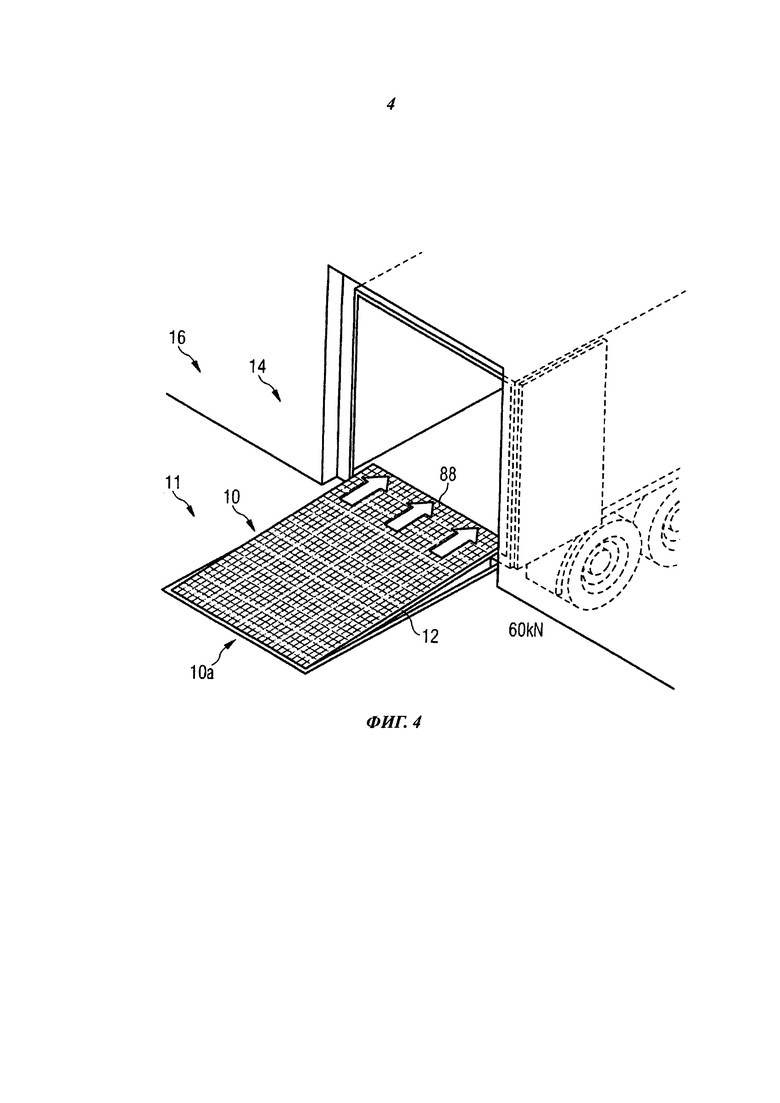
Фигура 4 - схематичное изображение в аксонометрии перевалочного пункта с расположенной внутри здания погрузочной рампой, выполненной в виде выдвижной погрузочной рампы.
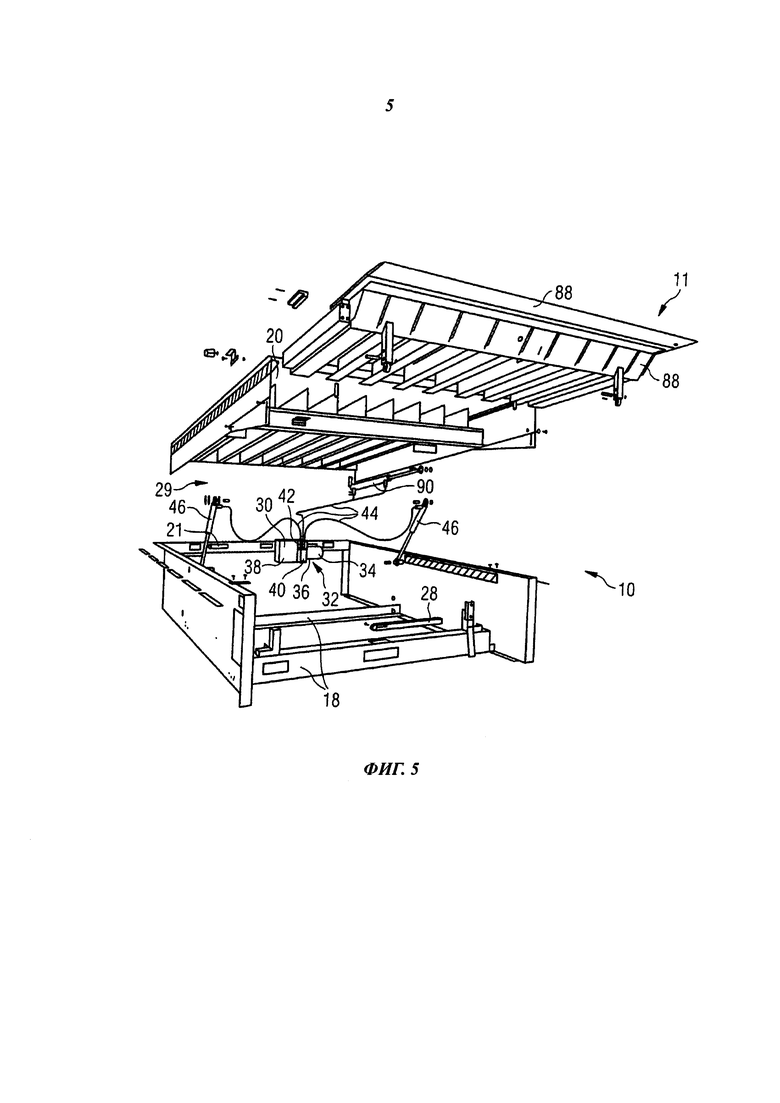
Фигура 5 - вид в аксонометрии в разобранном виде отдельных частей выдвижной погрузочной рампы.
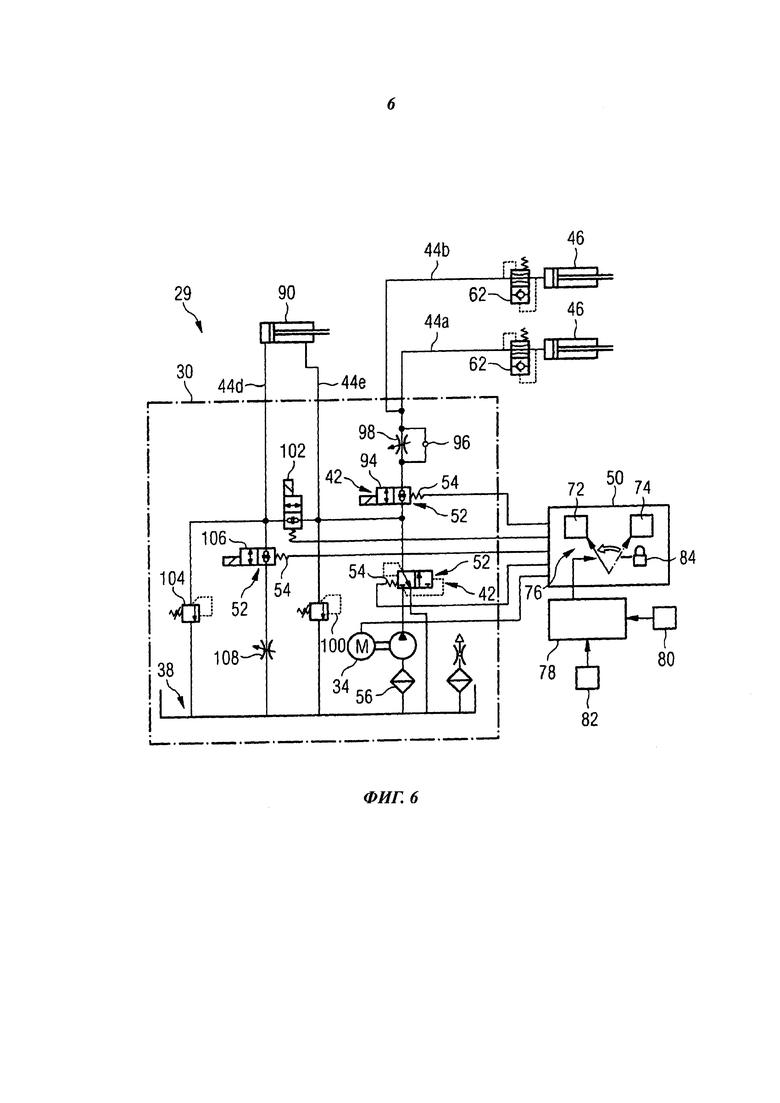
Фигура 6 - блок-схема гидравлического контура выдвижной погрузочной рампы, показанной на фигуре 5.
Фигура 7 - схематичное изображение в аксонометрии перевалочного пункта с погрузочной рампой, расположенной в выдвинутом тамбуре перед зданием.
Фигура 8 - схематичное изображение в аксонометрии перевалочной станции с несколькими перевалочными пунктами, оснащенными выдвинутыми тамбурами, показанными на фигуре 7, и расположенными внутри здания погрузочными рампами, показанными на фигуре 1 или 4.
Фигура 9 - схематичное изображение в аксонометрии перевалочного пункта с воротами, системой управления и погрузочной рампой.
Фигура 10 - блок-схема настройки погрузочной платформы.
Фигура 11 - блок-схема последующей эксплуатации погрузочной платформы.
Осуществление изобретения
На фигуре 1 изображен первый вариант исполнения погрузочной платформы 11 с погрузочной рампой 10, выполненной в виде погрузочной платформы 12 с подъемной кромкой, на перевалочном пункте 14, входящем в состав перевалочной станции 16.
На фигуре 2 изображен вариант исполнения погрузочной платформы 12 с подъемной кромкой с примерным расположением компонентов.
Как показано на фигуре 2, погрузочная платформа 12 с подъемной кромкой содержит несущую раму 18, с которой шарнирно соединена задняя оконечность платформы 20 с возможностью поворота вокруг горизонтальных осей 21 шарнира. На передней оконечности платформы 20, покрытой, например, рифленым листом, установлена складная кромка 22 с возможностью поворота вокруг горизонтально расположенных шарнирных осей 24 складной кромки. Слева и справа от платформы 20 расположены щитки 26, защищающие ноги. В поднятом состоянии платформу 20 можно подпирать ремонтной опорой 28.
Описываемые погрузочные платформы 10 можно приводить, например, электрогидравлическим устройством 29, предназначенным для подъема и опускания платформы 20 путем поворота вокруг шарнирной оси 21. В варианте исполнения, показанном на фигуре 2, электрогидравлическое устройство 29 рассчитано также на раскладывание и складывание складной кромки 22 вокруг шарнирной оси 24 складной кромки 22.
В варианте исполнения, показанном на фигурах 2 и 3, электрогидравлическое устройство 29 содержит электрогидравлический блок 30 с источником давления для подъемных цилиндров 46 и цилиндров 48 складной кромки. Источник 32 давления представляет собой, например, насос 36 с приводом от электродвигателя 34, нагнетающий гидравлическое масло из резервуара 38 гидравлического масла и направляющий его через блок 40 клапанов с регулирующими клапанами 42 и шлангами 44 в цилиндры 46, 48.
Схема гидравлического контура для электрогидравлического устройства 29 с указанной системой 50 управления погрузочной платформой изображена на фигуре 3. На фигуре 3 источник 32 давления с электродвигателем 34 и насосом 36 показан над резервуаром 38 гидравлического масла. В блоке 40 клапанов находятся регулирующие клапаны 42, выполненные в виде электромагнитных клапанов 52 с электромагнитными катушками 54 и получающие питание через систему 50 управления погрузочной платформой. Насос 36 всасывает гидравлическое масло из резервуара 38 гидравлического масла через всасывающий фильтр 56. Со стороны нагнетания насоса давление ограничено предохранительным клапаном 58. Предохранительный клапан 58 настроен, например, на предельное значение давления около 120 бар. В качестве регулирующего клапана 42 для активации подъемных цилиндров предусмотрен безнапорный клапан 60, выполненный в виде электромагнитного клапана 52 с электромагнитной катушкой 54. Если электромагнитная катушка 54 запитана от системы 50 управления погрузочной платформой, электромагнитный клапан 52 открывается, в результате чего гидравлическое давление поступает в шланги 44а и 44b для подъемного цилиндра 46 с тем, чтобы привести в действие подъемный цилиндр 46 для подъема платформы 20. Эти шланги 44а, 44b подсоединены с помощью предохранительных устройств 62 к подъемным цилиндрам 46.
Безнапорный клапан 60 включают таким образом, чтобы при отключении его электромагнитной катушки 54 клапан отсоединял подъемные цилиндры 46 от источника 32 давления и с помощью дроссельного клапана 64 переключался на другой регулирующий клапан 42, выполненный в виде электрического 2/2-ходового клапана 66 для опускания с электрическим приводом. Электрический 2/2-ходовой клапан 66 также выполнен в виде электромагнитного клапана 52 с электромагнитной катушкой 54. Если электромагнитная катушка 54 2/2-ходового клапана 66 находится под напряжением, то электрический 2/2-ходовой клапан 66 открывается и пропускает гидравлическое масло из шлангов 44а, 44b в резервуар 38 гидравлического масла.
Кроме того, давление на напорном выходе безнапорного клапана 60 посредством перекидного клапана 68 с гидравлическим приводом подводят к шлангу 44c для цилиндра складной кромки.
Когда подъемные цилиндры 46 достигают своего верхнего конечного положения, увеличивается давление на шлангах 44а, 44b подъемных цилиндров 46. Такое увеличение давления переключает перекидной клапан 68, позволяя подавать гидравлическое масло на цилиндр 48 складной кромки по шлангу 44c. В результате складная кромка 22 раскладывается, когда платформа 20 находится в крайнем верхнем положении. Втягивание цилиндра 48 складной кромки осуществляют с помощью перекидного клапана 68 и гидравлического 2/2-ходового клапана 70, управляемого давлением перед дроссельным клапаном 64. Таким образом, когда подъемные цилиндры 46 опускаются, цилиндр 48 складной кромки также втягивается.
Электромагнитные катушки 54 клапанов 60, 66, действующих в качестве регулирующих клапанов 42, в открытом состоянии потребляют относительно много энергии. В целях экономии энергии система 50 управления погрузочной платформой оснащена устройством 72 для выполнения режима удержания и работы, в котором соответствующие электромагнитные катушки 54 регулирующих клапанов 52, соответственно находятся под напряжением. В этом режиме подъемные цилиндры 46 можно перемещать, например, поднимать, или удерживать в плавающем состоянии.
Кроме того, система 50 управления погрузочной платформой содержит устройство 74 для выполнения режима экономии энергии, в котором электромагнитные катушки 54 регулирующих клапанов 42 отсоединены от источника питания, а регулирующие клапаны 42 закрыты. Для переключения между режимом удержания и работы и режимом экономии энергии система 50 управления погрузочной платформой дополнительно содержит устройство 76 выбора режима, которое автоматически, на основании полученного сигнала, останавливает режим удержания и работы, осуществляемый устройством 72, и включает режим экономии энергии, осуществляемый устройством 74, или наоборот, снова включает режим удержания и работы. Устройство 76 выбора режима работает в зависимости от распознавания состояния покоя соответствующей погрузочной рампы 10. Для этого устройство 76 выбора режима подсоединено к устройству 78 распознавания состояния покоя.
Устройство 78 распознавания состояния покоя в одном из вариантов исполнения подсоединено только к системе 80 управления воротами 112 перевалочного пункта 14, предназначенными для закрывания перевалочного проема 114 (см., например, фиг. 9). Если система 80 управления воротами распознает конечное положение ворот 112, то на основании этого можно сделать вывод о переходе в состояние покоя. Ниже этот момент будет рассмотрен подробно.
В качестве альтернативы или дополнения устройство 78 распознавания состояния покоя подключено, по меньшей мере, к одному датчику 82 состояния покоя, например, переключателю или подобному устройству, который распознает нахождение погрузочной рампы 10 в состоянии покоя.
На фигуре 3, к рассмотрению которой мы приступаем, система 50 управления погрузочной платформой дополнительно содержит устройство 84 блокировки выбора режима, блокирующее работу устройства 76 выбора режима таким образом, чтобы переключение с устройства 72 режима удержания и работы на устройство 74 режима экономии энергии было невозможно. Таким образом, устройство 84 блокировки выбора режима не позволяет выполнять режим экономии энергии при распознавании состояния покоя. Иными словами, при активном устройстве 84 блокировки выбора режима на регулирующие клапаны 52 в течение всего времени работы погрузочной рампы 10 или в течение всего времени работы перевалочной станции 16 подается соответствующее питание.
Устройства 72, 74, 76, 78, 84 можно реализовать с помощью аппаратных средств или программного обеспечения, выполняемого в вычислительном блоке системы 50 управления погрузочной платформой.
В частности, устройство 84 блокировки выбора режима можно активировать в меню при настройке системы 50 управления погрузочной платформой; в альтернативном варианте в качестве устройства 84 блокировки выбора режима используют переключатель.
На фигуре 4 изображен другой вариант исполнения погрузочной платформы 11 с погрузочной рампой 10, причем погрузочная рампа 10 в этом варианте исполнения выполнена в виде выдвижной погрузочной платформы, расположенной внутри здания на перевалочном пункте 14 перевалочной станции 16.
Как показано на фигурах 4 и 5, выдвижная погрузочная платформа в основном устроена аналогично погрузочной платформе 12 с подъемной кромкой, однако вместо складной кромки 22, которую можно раскладывать путем поворота вокруг шарнирных осей 24 складной кромки, предусмотрена одна или несколько выдвижных кромок 88, которые можно перемещать вперед и назад параллельно платформе 20. Для соответствующих деталей вариантов исполнения погрузочных рамп 10 используются одинаковые ссылочные обозначения.
Как показано, в частности на фигуре 5, выдвижная погрузочная платформа в изображенном варианте исполнения также содержит несущую раму 18, платформу 20, установленную на несущей раме 18 с возможностью поворота вверх и вниз вокруг горизонтальной шарнирной оси 21 с помощью подъемных цилиндров 46, а также гидравлическое устройство 29 с электрогидравлическим блоком 30. Электрогидравлический блок 30 служит источником 32 давления и оснащен электродвигателем 34 и насосом 36 для подачи гидравлического масла из резервуара 38 гидравлического масла. Гидравлическое масло направляют с помощью регулирующих клапанов 42, размещенных в блоке 40 клапанов, и шлангов 44 на подъемные цилиндры 46 и цилиндр 90 выдвижения. С помощью цилиндра 90 выдвижения выдвижную кромку 88 можно перемещать относительно платформы 20 вперед от шарнирных осей 21 или назад к шарнирным осям 21.
Кроме того, в изображенном варианте выдвижной погрузочной платформы предусмотрена ремонтная опора 28.
Пример схемы гидравлических подключений для погрузочной рампы 10, изображенной на фигуре 5, и возможная активация с помощью системы 50 управления погрузочной платформой показаны на фигуре 6.
Как показано на фигуре 6, система 50 управления погрузочной платформой подает питание на двигатель 34, чтобы с помощью насоса 36 забрать гидравлическое масло из резервуара 38 гидравлического масла через всасывающий фильтр 56 и подать его с напорной стороны насоса 36 на безнапорный клапан. Безнапорный клапан - это первый из регулирующих клапанов 42, который в качестве электромагнитного клапана 52 снабжен электромагнитной катушкой 54, ток на которую может подаваться через систему 50 управления погрузочной платформой. Если электромагнитная катушка 54 безнапорного клапана находится
под напряжением, то гидравлическое давление подается в линию, соединенную со шлангом 44е для втягивания цилиндра 90 выдвижения. Кроме того, эта линия подсоединена через дополнительный регулирующий клапан 42, выполненный в виде первого 2/2-ходового клапана 94. Первый 2/2-ходовой клапан 94 также выполнен в виде электромагнитного клапана 52 с электромагнитной катушкой 54, закрытого в обесточенном состоянии. Для подъема гидравлическое масло нагнетают через обратный клапан 96 через дроссельный клапан 98 к шлангам 44b, 44а подъемных цилиндров 46, которые в свою очередь, защищены устройствами 62 предотвращения разрыва шланга.
Давление нагнетания на напорной стороне между клапаном 94 и безнапорным клапаном ограничено первым предохранительным клапаном 100, служащим нагнетательным клапаном. Давление нагнетания на предохранительном клапане 100 выставлено, например, примерно на 150 бар. Далее эта напорная сторона подсоединена посредством второго 2/2-ходового клапана 102 к шлангу 44d для выдвижения цилиндра 90 выдвижения. Давление в этом шланге 44d ограничено с помощью второго предохранительного клапана 104 значением, которое меньше давления нагнетания и составляет, например, примерно 100 бар.
Второй 2/2-ходовой клапан 102, служащий регулирующим клапаном 42, также выполнен в виде электромагнитного клапана 52 с электромагнитной катушкой 54. Второй 2/2-ходовой клапан 102 в обесточенном состоянии закрыт.При закрытом первом клапане 94 и открытом втором 2/2-ходовом клапане 102 в обоих шлангах 44d, 44е цилиндра 90 выдвижение устанавливается одинаковое давление. Вследствие различия поверхностей, нагружаемых давлением, в цилиндре 90 выдвижения цилиндр 90 выдвигается. Опускание цилиндров 90, 46 происходит при открытом первом и втором 2/2-ходовом клапане 94, 102 посредством третьего 2/2-ходового клапана 106 и предназначенного для опускания дроссельного клапана 108. Третий 2/2-ходовой клапан 106 служит регулирующим клапаном 42 и выполнен в виде электромагнитного клапана 52 с электромагнитной катушкой 54, подключенной к системе 50 управления погрузочной платформой.
Система 50 управления погрузочной платформой выполнена аналогично первому варианту исполнения и, соответственно, также содержит устройство 72 для выполнения режима удержания и работы, устройство 74 для выполнения режима экономии энергии, устройство 76 выбора режима и устройство 84 блокировки выбора режима. Если устройство 84 блокировки выбора режима не активировано, то с помощью устройства 76 выбора режима на основании сигнала, полученного от устройства 78 распознавания состояния покоя, генерирующего этот сигнал на основании сигналов системы 80 управления воротами или датчика 82 состояния покоя, можно активировать устройство 74 для выполнения режима экономии энергии в состоянии покоя погрузочной рампы 10 с целью осуществления режима экономии энергии, в котором регулирующие клапаны 42 закрыты, а электромагнитные катушки 54 обесточены. Если, напротив, устройство 84 блокировки выбора режима активировано, то активно только устройство 72 для выполнения режима удержания и работы, благодаря чему регулирующие клапаны 42 соответствующим образом запитаны и включены, позволяя с помощью подъемных цилиндров 46 перемещать платформу 20 или поддерживать ее в плавающем режиме.
Погрузочные рампы 10, изображенные на фигурах 1 и 4, расположены внутри части здания перевалочной станции 16 таким образом, чтобы в направлении перевалки (см. стрелки на фигуре 4) можно было выполнять погрузку (или наоборот разгрузку); платформы 20 погрузочных рамп 10, находящихся в состоянии покоя, расположены, однако, на том же уровне, что и остальной пол этой части перевалочной станции, в результате чего возможно движение поперек направления перевалки через платформы 20.
Как показано на фигурах 2 и 5, платформы 20 обычно не имеют опор, но удерживаются в своем положении покоя только подъемными цилиндрами 46. Эти подъемные цилиндры 46, таким образом, воспринимают нагрузку при транспортировке грузов. В случае, если нагрузка увеличивается вследствие движения груженых транспортеров или подобных им транспортных средств, то это может привести к деформации и, следовательно, к опусканию платформы 20. В режиме удержания и работы (при работающем устройстве 72 для выполнения режима удержания и работы) регулирующие клапаны 42 открыты, благодаря чему подъемные цилиндры 46 удерживаются в плавающем положении и, за счет известной компенсации давления, могут воспринимать такие увеличенные нагрузки.
Если, напротив, в режиме экономии энергии (при активном устройстве 74 выполнения режима экономии энергии) электромагнитные катушки 54 переводятся в обесточенное состояние, регулирующие клапаны 52 будут закрыты. Нагрузки на подъемных цилиндрах 46 не удастся компенсировать вследствие того, что жидкое гидравлическое масло не сжимается. Таким образом, в ситуации, показанной на фигурах 1 и 4, при транспортировке тяжелых грузов в поперечном направлении платформы 20, в отсутствие возможности компенсации гидравлическими цилиндрами 46, будут очень сильно нагружены и, возможно, повреждены.
Таким образом, если в режиме экономии энергии возможно движение в поперечном направлении (см. фигуры 1 и 4), потребуется установить подъемные цилиндры 46 большего размера и/или использовать более сложные конструкции погрузочных рамп 10.
Также существуют погрузочные платформы 11 (см. фигуру 7), не предусматривающие возможности движения поперек погрузочной рампы 10.
На фигуре 7 изображен перевалочный пункт 14 перевалочной станции 16 с погрузочной рампой 10, расположенной в выдвинутом тамбуре 110 перед перевалочным проемом 114, закрытым воротами 112. В таком выдвинутом тамбуре 110 движение поперек погрузочной рампы 10 невозможно.
Также существуют перевалочные станции 16, на которых, по существу, следует ожидать только транспортировку грузов небольшой массы, то есть, проблема движения поперек погрузочной рампы 10, находящейся в режиме экономии энергии, не возникает, так как предельная нагрузка на перегрузочные рампы 10 не превышается.
Чтобы можно было оснащать перевалочные станции 16 сконструированными с минимально возможными усилиями и, соответственно, более дешевыми погрузочными рампами 10 на погрузочных платформах 11, имеющих возможность максимально длительной работы в режиме экономии энергии, предложенную систему 50 управления погрузочной платформой оснащают устройством 84 блокировки выбора режима.
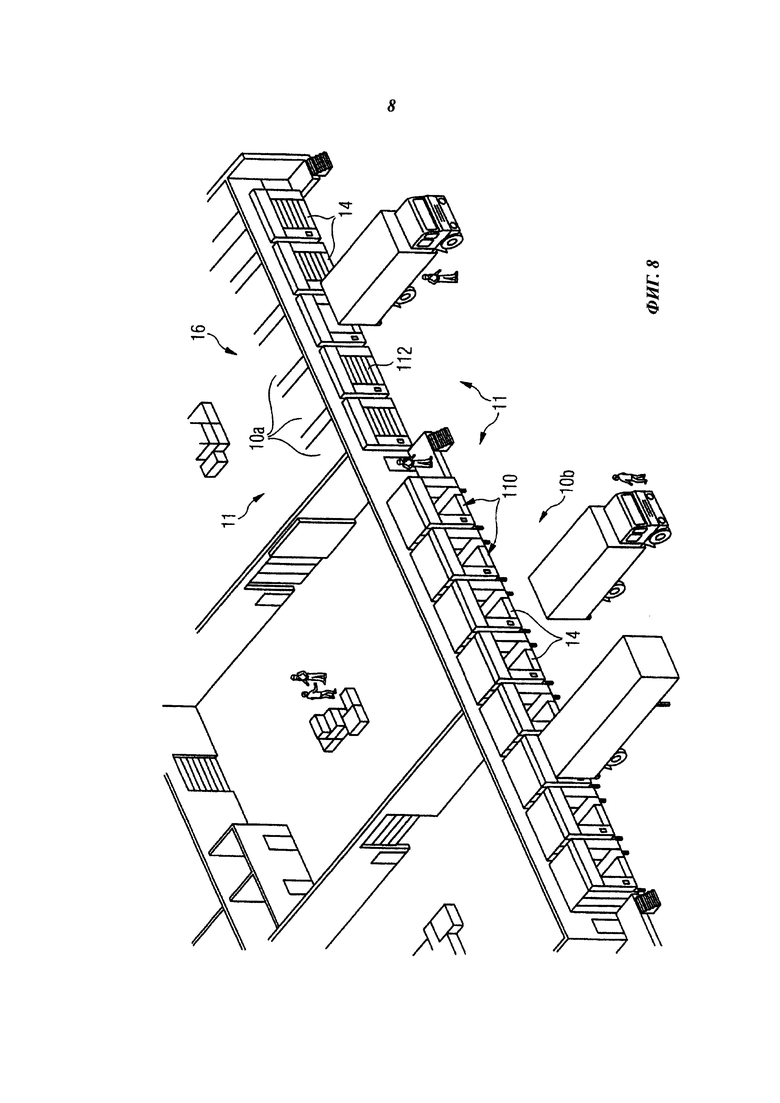
На фигуре 8 изображен пример перевалочной станции 16 с погрузочной платформой 11 с несколькими погрузочными рампами 10, причем на некоторых погрузочных рампах 10а возможно движение в поперечном направлении, а на других погрузочных рампах 10b (например, в перевалочных пунктах 14 с выдвинутыми тамбурами 110) движение в поперечном направлении невозможно.
При наладке этой погрузочной платформы 11 системы 50 управления первой группы погрузочных рамп 10а с возможностью движения в поперечном направлении настраивают таким образом, чтобы выбор режима экономии энергии был невозможен. Это можно реализовать, в частности, путем активации устройства 84 блокировки выбора режима (то есть, отключения устройства 74 для выполнения режима экономии энергии). Во второй группе погрузочных рамп 10b, на которых движение в поперечном направлении невозможно, возможен автоматический выбор режима экономии энергии. В соответствующих системах управления погрузочными платформами устройство 84 блокировки выбора режима отключают для этой группы погрузочных рамп 10b, например, при наладке перевалочной станции 16.
Систему 50 управления погрузочной платформой можно соединить, в частности, с системой 80 управления воротами 112, как показано на фигуре 9. Система 80 управления воротами 112 проверяет, достигли ли ворота 112 верхнего конечного положения, и только после этого активирует возможность работы погрузочной рампы 10. Если устройство 76 выбора режимов активно, то, например, при распознавании положения ворот «ВОРОТА ОТКРЫТЫ» режим экономии энергии выключается, и включается режим 72 удержания и работы.
Когда ворота снова закрываются, то, например, при выходе ворот из положения «ВОРОТА ОТКРЫТЫ» или, например, при достижении положения «ВОРОТА ЗАКРЫТЫ» на устройство 76 выбора режимов может поступать соответствующее сообщение, позволяющее повторно активировать режим экономии энергии. В альтернативном варианте могут быть предусмотрены датчики 82 состояния покоя, определяющие, когда погрузочная рампа 10 снова окажется в состоянии покоя, и подающие сигнал на устройство 76 выбора режима для выбора режима экономии энергии. В другом альтернативном варианте для генерации сигнала состояния покоя можно также использовать команду возврата (автоматического возврата) погрузочной рампы 10, по которой погрузочная рампа 10 возвращается в свое состояние покоя. В этом случае рекомендуется после распознавания срабатывания функции возврата выждать определенный предохранительный период времени, прежде чем активировать режим экономии энергии.
На фигуре 10 изображена первая часть блок-схемы, описывающей способ наладки и эксплуатации погрузочной платформы 11.
При наладке после запуска наладочного меню 120 на этапе 122 будет предложено определить, возможно ли движение в поперечном направлении. Если такое движение невозможно, то на этапе 124 активируют устройство 76 выбора режима или деактивируют устройство 84 блокировки выбора режима. После этого этапа 124 возможен этап 126 с автоматическим выбором режима экономии энергии.
Если, однако, на этапе 122 будет определено, что движение в поперечном направлении возможно, то на этапе 128 будет предложено указать, возможна ли или следует ли ожидать транспортировки в поперечном направлении грузов с массой, превышающей заданную для соответствующей погрузочной рампы 10 предельную нагрузку. Если это не так, то на этапе 124 можно будет снова активировать устройство 76 выбора режима или деактивировать устройство 84 блокировки выбора режима, чтобы стала возможной работа с автоматическим выбором режима экономии энергии 126.
Однако, если возможна или ожидается транспортировка в поперечном направлении грузов с массой, превышающей предельную нагрузку, то будет деактивировано устройство 76 выбора режима или активировано устройство 84 блокировки выбора режима, то есть, выбор режима экономии энергии для этой погрузочной рампы 10, 10а невозможен. Если система 50 управления погрузочной платформой активирована, что имеет место при работе перевалочной станции 16, то всегда будет выполняться режим удержания и работы. Электромагнитные катушки 54 находятся под напряжением, поэтому даже когда платформа 20 находится в состоянии покоя, подъемные цилиндры 46 работают в плавающем режиме. Нагрузки, превышающие определенное пороговое значение нагрузки, можно отводить гидравлическим путем через открытые регулирующие клапаны 42.
Таким образом, даже в условиях движения в поперечном направлении можно применять погрузочные рампы 10, 10а, имеющие относительно низкие предельные нагрузки и, следовательно, относительно небольшие подъемные цилиндры и другие компоненты погрузочных рамп 10, 10а.
На фигуре 11 воспроизведена другая часть блок-схемы способа наладки и эксплуатации погрузочной платформы 11, схематично иллюстрирующая режим 126 работы с автоматическим выбором режима экономии энергии.
Для примера взята погрузочная платформа 11, изображенная на фигуре 9. В варианте способа, показанном на фигуре 11, устройство 78 распознавания состояния покоя определяет состояние покоя на основании сигнала положения ворот, поступающего, например, от системы 80 управления воротами. Таким образом, на этапе 130 запрашивают положение ворот. Если на этапе 132 система 50 управления погрузочной платформой может обрабатывать только сигнал положения ворот 112 «ВОРОТА ОТКРЫТЫ» (открытое конечное положение), то на этапе 134 будет выполнена проверка наличия сигнала открытого конечного положения. Если сигнал открытого конечного положения присутствует (этап 134), будет активировано устройство 76 выбора режима для включения устройства 72 выполнения режима удержания и работы; на этапе 136, следовательно, будет осуществляться режим удержания и работы. Напротив, если на этапе 134 будет определено, что сигнал открытого конечного положения отсутствует, то устройство 76 выбора режима будет активировано для включения устройства 74 выполнения режима экономии энергии. Иными словами, на этапе 138 будет выбран режим экономии энергии.
Если, однако, система управления погрузочной платформой может обрабатывать не только сигнал открытого конечного положения, но и сигнал закрытого конечного положения, то на этапе 134 будет выполнен запрос открытого конечного положения. Если сигнал открытого конечного положения присутствует, то на этапе 136 будет выбран режим удержания и работы. Если сигнал открытого конечного положения отсутствует, то будет запрошено, присутствует ли сигнал закрытого конечного положения (ВОРОТА ЗАКРЫТЫ). Если это так, то на этапе 138 будет выбран режим экономии энергии.
Как уже упоминалось, состояние покоя погрузочной рампы можно распознавать не только путем опроса положения ворот, но и другими различными способами.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
10 погрузочная рампа
10а погрузочная рампа сдвижением в поперечном направлении
10b погрузочная рампа без движения в поперечном направлении
11 погрузочная платформа
12 погрузочная платформа с подъемной кромкой
14 перевалочный пункт
16 перевалочная станция
18 несущая рама
20 платформа
21 шарнирная ось
22 складная кромка
24 шарнирная ось складной кромки
26 щиток для защиты ног
28 ремонтные опоры
29 электрогидравлическое устройство
30 электрогидравлический блок
32 источник давления
34 электродвигатель
36 насос
38 резервуар гидравлического масла
40 блок клапанов
42 регулирующий клапан
44 шланги
44а шланг для подъемного цилиндра
44b шланг для подъемного цилиндра
44с шланг для цилиндра складкой кромки
44d шланг для цилиндра выдвижения ВКЛ
44е шланг для цилиндра выдвижения ВЫКЛ
46 подъемный цилиндр
48 цилиндр складной кромки
50 система управления погрузочной рампой
52 электромагнитный клапан
54 электромагнитная катушка
56 всасывающий фильтр
58 предохранительный клапан
60 безнапорный клапан
62 устройство защиты от разрыва шланга
64 дроссельный клапан
66 электрический 2/2-ходовой клапан
68 перекидной клапан
70 гидравлический 2/2-ходовой клапан
72 устройство для выполнения режима удержания и работы
74 устройство для выполнения режима экономии энергии
76 устройство выбора режима
78 устройство распознавания состояния покоя
80 система управления ворот
82 датчик состояния покоя
84 устройство блокировки выбора режима
88 выдвижная кромка
90 цилиндр выдвижения
94 первый 2/2-ходовой клапан
96 обратный клапан
98 дроссельный клапан
100 первый предохранительный клапан
102 второй 2/2-ходовой клапан
104 второй предохранительный клапан
106 третий 2/2-ходовой клапан
108 дроссельный клапан (опускание)
110 выдвинутый тамбур
112 ворота
114 перевалочный проем
120 запуск наладочного меню
122 возможно ли движение в поперечном направлении?
124 активация устройства выбора режима / деактивация устройства блокировки выбора режима
126 работа с автоматическим выбором режима экономии энергии
24
128 возможно ли или следует ли ожидать транспортировку в поперечном направлении грузов с массой, превышающей предельную нагрузку для соответствующей погрузочной рампы?
130 запрос положения ворот
132 может ли система управления погрузочной платформой обрабатывать только сигнал открытого конечного положения?
134 имеет ли место сигнал открытого конечного положения (ВОРОТА ОТКРЫТЫ)?
136 выбор режима удержания и работы
138 выбор режима экономии энергии
N нет
Y да




Изобретение относится к способу наладки и эксплуатации погрузочной платформы. Для погрузочных рамп, у которых движение в поперечном направлении невозможно или возможна только транспортировка в поперечном направлении грузов небольшой массы, можно автоматически выбирать режим экономии энергии в состоянии покоя погрузочной рампы. Для погрузочных рамп, на которых возможна транспортировка в поперечном направлении грузов значительной массы, возможность выбора режима экономии энергии не предусмотрена или заблокирована. В результате на перевалочных станциях, не предусматривающих движения в поперечном направлении по погрузочным рампам, можно реализовать режим с особенно низким потреблением энергии, а также можно снизить расход материала на изготовление погрузочных рамп, на которых ожидается движение в поперечном направлении. 4 н. и 6 з.п. ф-лы, 11 ил.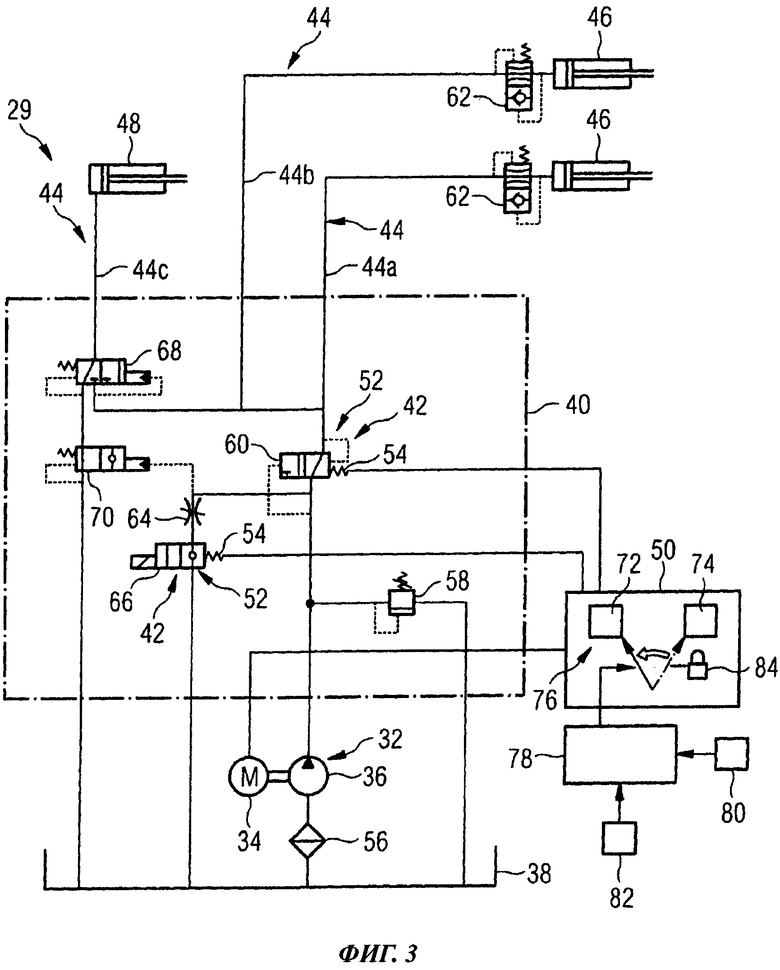
1. Способ наладки и эксплуатации погрузочной платформы (11), содержащей по меньшей мере одну погрузочную рампу (10) на перевалочной станции (16), по меньшей мере один подъемный цилиндр (46), источник (32) давления, регулирующий клапан (42) для подъемного цилиндра (46), предназначенного для подъема погрузочной рампы (10), и систему (50) управления погрузочной платформой, предназначенную для активации регулирующего клапана (42), причем для наладки погрузочной платформы (11) определяют, возможна ли на перевалочной станции (16) транспортировка грузов с массой, превышающей пороговое значение нагрузки, по погрузочной рампе (10) в поперечном направлении, причем система (50) управления погрузочной платформой обеспечивает:
a) в случае, если транспортировка грузов с массой, превышающей пороговое значение нагрузки, в поперечном направлении возможна, переключение регулирующего клапана (42) в нагруженном состоянии и в состоянии покоя погрузочной рампы (10) в открытое положение и удержание в этом положении для удержания и/или перемещения погрузочной рампы (10), и
b) в случае, если транспортировка грузов в поперечном направлении невозможна, либо возможна лишь транспортировка в поперечном направлении грузов с массой, не достигающей порогового значения нагрузки, переключение в режим экономии энергии, в котором регулирующий клапан (42) обесточен и закрыт, или в режим удержания и работы, в котором регулирующий клапан (42) запитан и открыт для подъема или удержания погрузочной рампы (10) посредством подъемного цилиндра (46),
причем при работе согласно варианту b) определяют по меньшей мере один параметр, указывающий на состояние покоя или нагруженное состояние, и в зависимости от этого устанавливают в состоянии покоя режим экономии энергии, а в нагруженном состоянии режим удержания и работы.
2. Способ по п. 1, отличающийся тем, что в качестве параметра, указывающего на состояние покоя или нагруженное состояние, определяют положение, в частности конечное положение, одних из ворот (112) перевалочной станции (16), относящихся к погрузочной рампе (10).
3. Способ по п. 2, отличающийся тем, что переключение из режима экономии энергии в режим удержания и работы осуществляют после того, как будет обнаружено, что ворота (112) находятся в конечном открытом положении.
4. Способ по п. 2 или 3, отличающийся тем, что переключение из режима удержания и работы в режим экономии энергии осуществляют после того, как будет обнаружено:
a) что ворота (112) не находятся в конечном открытом положении или покинули открытое конечное положение, или
b) что ворота (112) находятся в конечном закрытом положении или достигают его.
5. Способ по одному из пп. 1-3, отличающийся тем, что пороговое значение нагрузки для принятия решения о допустимости режима экономии энергии выбирают в зависимости от максимально допустимой нагрузки на погрузочную рампу (10), находящуюся в состоянии покоя.
6. Система (50) управления погрузочной платформой, предназначенная для использования в способе по одному из предыдущих пунктов, причем система (50) управления погрузочной платформой выполнена с возможностью активации по меньшей мере одного регулирующего клапана (42) для подъемного цилиндра (46) погрузочной рампы (10), причем система (50) управления погрузочной платформой обеспечивает удержание по меньшей мере одного регулирующего клапана (42) в обесточенном закрытом состоянии в режиме экономии энергии или в запитанном открытом состоянии в режиме удержания и работы, при этом система (50) управления погрузочной платформой содержит устройство блокировки режима экономии энергии, предназначенное для предотвращения включения режима экономии энергии при наладке погрузочной платформы (11).
7. Система управления погрузочной платформой по п. 6, отличающаяся тем, что система управления погрузочной платформой выполнена с возможностью подключения к устройству определения положения ворот для управления погрузочной рампой в зависимости от положения ворот.
8. Система управления погрузочной платформой по п. 7, отличающаяся тем, что предусмотрено устройство настройки управления по положению ворот, обеспечивающее включение или отключение режима управления в зависимости от положения ворот.
9. Погрузочная платформа (11) для использования в способе по одному из пп. 1-5, содержащая по меньшей мере одну погрузочную рампу (10), по меньшей мере один подъемный цилиндр (46), предназначенный для подъема погрузочной рампы (10), по меньшей мере один регулировочный клапан (42) и источник (32) давления для приведения в действие подъемного цилиндра (46), и систему (50) управления погрузочной платформой по одному из пп. 6-8, предназначенную для управления регулирующим клапаном (42).
10. Перевалочная станция (16) с погрузочной платформой (11) по п. 9, отличающаяся тем, что система (50) управления погрузочной платформой выполнена или настроена таким образом, чтобы для погрузочной рампы (10b), для которой транспортировка грузов с массой, превышающей заданную пороговую нагрузку, в поперечном направлении невозможна и/или не предусмотрена, в состоянии покоя погрузочной рампы (10b) обеспечивать выбор режима экономии энергии, а для погрузочной рампы (10a), для которой транспортировка грузов с массой, превышающей заданную пороговую нагрузку, в поперечном направлении возможна и/или предусмотрена, запретить выбор режима экономии энергии.
| DE 7918512 U1, 28.08.1980 | |||
| DE 9102364 U1, 16.05.1991 | |||
| EP 1099653 A1, 16.05.2001 | |||
| Уравнивающий мостик | 1983 |
|
SU1137042A1 |
| Уравнивающий мостик | 1984 |
|
SU1221142A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |

