УРОВЕНЬ ТЕХНИКИ
В патенте США №7344000 B2 раскрывается погрузочно-разгрузочное транспортное средство, содержащее основание, например, приводной узел, и узел каретки, например, платформу, в котором узел каретки является подвижным относительно основания. Транспортное средство дополнительно содержит цилиндр, соединенный с основанием для осуществления перемещения узла каретки относительно основания и гидравлическую систему для подачи жидкости под давлением в цилиндр. Гидравлическая система включает в себя клапан с электронным управлением, соединенный с цилиндром. Транспортное средство дополнительно содержит систему управления для управления работой клапана, таким образом, чтобы клапан закрывался в случае непредусмотренного опускания узла каретки со скоростью, превышающей заданную скорость.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В соответствии с первым аспектом настоящего изобретения предлагается погрузочно-разгрузочное транспортное средство, содержащее: несущую конструкцию, включающую в себя неподвижный элемент; подвижный узел, соединенный с несущей конструкцией; гидравлическую систему; и устройство управления. Несущая конструкция дополнительно содержит подъемное устройство для осуществления перемещения подвижного узла относительно неподвижного элемента несущей конструкции. Подъемное устройство включает в себя по меньшей мере один узел плунжерного цилиндра. Гидравлическая система включает в себя двигатель, насос, соединенный с двигателем для подачи жидкости под давлением по меньшей мере к одному узлу плунжерного цилиндра, и по меньшей мере один клапан с электронным управлением, связанный по меньшей мере с одним узлом плунжерного цилиндра. Устройство управления может рассчитывать скорость подвижного узла по скорости двигателя и управлять работой по меньшей мере одного клапана при использовании расчетной скорости подвижного узла.
Устройство управления способно подавать энергию по меньшей мере к одному клапану для открытия по меньшей мере одного клапана с целью обеспечения опускания подвижного узла управляемым способом до требуемого положения относительно неподвижного элемента несущей конструкции.
Устройство управления может прекратить подачу энергии по меньшей мере к одному клапану в ответ на подаваемую оператором команду о прекращении дальнейшего опускания подвижного узла относительно неподвижного элемента несущей конструкции.
По меньшей мере один клапан может работать в качестве обратного клапана при прекращении подачи энергии для блокировки вытекания жидкости под давлением по меньшей мере из одного узла плунжерного цилиндра и для обеспечения впуска жидкости под давлением по меньшей мере в один узел плунжерного цилиндра во время подъема подвижного узла.
По меньшей мере один клапан может содержать электромагнитный, нормально закрытый, пропорциональный клапан.
По меньше мере один клапан может помещаться в основании по меньшей мере узла плунжерного цилиндра.
Несущая конструкция может дополнительно содержать приводной блок и неподвижный элемент несущей конструкции может содержать первый сварной узел мачты неподвижно соединенный с приводным блоком. Подъемное устройство может содержать: второй сварной узел мачты подвижный относительно первого сварного узла мачты и третий сварной узел мачты, подвижный относительно первого и второго сварных узлов мачты. По меньшей мере один поршень/цилиндр в сборе может содержать: по меньшей мере один узел плунжерного цилиндра, соединенный между первым и вторым сварными узлами мачты для осуществления перемещения второго и третьего сварных узлов мачты относительно первого сварного узла мачты и второй узел плунжерного цилиндра, соединенный между третьим сварным узлом мачты и подвижным узлом для осуществления перемещения подвижного узла относительно третьего сварного узла мачты. По меньшей мере один клапан с электронным управлением может содержать: по меньшей мере один первый электромагнитный, нормально закрытый, пропорциональный клапан, связанный по меньшей мере с одним первым узлом плунжерного цилиндра и второй электромагнитный, нормально закрытый, пропорциональный клапан, связанный со вторым узлом плунжерного цилиндра.
Устройство управления может содержать узел датчиков положения, связанное с подвижным узлом для генерирования импульсов узла датчиков положения по мере перемещения подвижного узла относительно первого сварного узла мачты, и регулятор, соединенный с узлом датчиков положения и первым и вторым клапанами для приема импульсов узла датчиков положения, генерируемых узлом датчиков положения, и определения определенной скорости подвижного узла на основании импульсов узла датчиков положения.
Устройство управления может управлять работой по меньшей мере одного первого клапана и второго клапана посредством сравнения вычисленной скорости подвижного узла по меньшей мере с первого предельной скоростью на основании первой расчетной скорости подвижного узла и фиксированной, второй предельной скорости.
Регулятор может прекратить подачу энергии к первому и второму клапанам, переводя их из активного (рабочего) открытого состояния в закрытое состояние в случае, когда подвижный узел опускается с определенной скоростью подвижного узла, превышающей одну из первой и второй предельных скоростей.
Регулятор может медленно закрывать первый и второй клапаны в случае, когда подвижный узел опускается со скоростью, превышающей первую или вторую граничные скорости.
Регулятор может заставить первый и второй клапаны переходить из своего активного (рабочего) открытого положения в свое закрытое положение по истечении периода времени, составляющего от примерно 0,3 секунды до примерно 1,0 секунды.
Устройство управления может рассчитывать скорость подвижного узла на основании скорости двигателя посредством: пересчета скорости двигателя в скорость потока жидкости насоса, пересчета скорости потока жидкости насоса в скорость поршня и пересчета скорости поршня в расчетную скорость подвижного узла.
Устройство управления может использовать расчетную скорость подвижного узла и определенную (вычисленную) скорость подвижного узла для генерирования скорректированного объемного коэффициента полезного действия насоса и использовать скорректированный объемный коэффициент полезного действия насоса при расчете последующей расчетной скорости подвижного узла.
Устройство управления можно сконфигурировать для измерения величины электрического тока к двигателю гидравлической системы или от него и для уменьшения рабочей скорости двигателя гидравлической системы, если величина электрического тока к двигателю гидравлической системы или от него превышает заранее установленное предельное значение или равняется ему.
Устройство управления можно сконфигурировать для контроля давления жидкости под давлением и для выполнения ответной процедуры, содержащей управления по меньшей мере одним клапаном, чтобы управлять опусканием несущей конструкцией, если контролируемое давление падает ниже предельного давления.
Предельное давление может зависеть по меньшей мере от максимальной высоты подъема подвижного узла или веса груза, перемещаемого несущей конструкцией.
В соответствии со вторым аспектом настоящего изобретения предлагается погрузочно-разгрузочное транспортное средство, содержащее: неподвижный сварной узел мачты; по меньшей мере один подвижный сварной узел мачты, соединенный с неподвижным сварным узлом мачты; узел каретки вил, соединенное по меньшей мере с одним подвижным сварным узел мачты; по меньшей мере один первый узел плунжерного цилиндра, соединенный с неподвижным сварным узлом мачты и по меньшей мере с одним подвижным сварным узлом мачты для осуществления перемещения по меньшей мере одного подвижного сварного узла мачты относительно неподвижного сварного узла мачты; второй узел плунжерного цилиндра, соединенный с узлом каретки вил и по меньшей мере с одним подвижным сварным узлом мачты для осуществления перемещения узла каретки вил относительно по меньшей мере одного подвижного сварного узла мачты; гидравлическую систему; и устройство управления. Гидравлическая система может включать в себя двигатель, насос, соединенный с двигателем для подачи жидкости под давлением к первому и второму узлам плунжерного цилиндра, и по меньшей мере один первый клапан с электронным управлением и второй клапан с электронным управлением, связанные по меньшей мере с одним первым узлом плунжерного цилиндра, и со вторым узлом плунжерного цилиндра. Устройство управления может рассчитывать скорость узла каретки вил в сборе относительно неподвижного сварного узла мачты по скорости двигателя и управлять работой первого и второго клапанов при использовании расчетной скорости узла каретки вил.
Устройство управления может управлять работой клапанов посредством сравнения вычисленной скорости узла каретки вил и предельной скорости по расчетной скорости узла каретки вил.
В соответствии с третьим аспектом настоящего изобретения предлагается погрузочно-разгрузочное транспортное средство, содержащее: несущую конструкцию, включающую в себя неподвижный элемент; подвижный узел, соединенный с несущей конструкцией; гидравлическую систему и устройство управления. Несущая конструкция может дополнительно содержать подъемное устройство для осуществления перемещения подвижного узла относительно неподвижного элемента несущей конструкции. Подъемное устройство включает в себя по меньшей мере один узел плунжерного цилиндра. Гидравлическая система включает в себя двигатель, насос, соединенный с двигателем для подачи жидкости под давлением по меньшей мере к одному узлу плунжерного цилиндра, и клапан с электронным управлением, связанный по меньшей мере с одним узлом плунжерного цилиндра. Устройство управления может рассчитывать скорость подвижного узла по скорости двигателя и вычислить скорректированный объемный коэффициент полезного действия насоса при использовании расчетной скорости подвижного узла и определенной скорости подвижного узла.
Устройство управления может определять скорректированный объемный коэффициент полезного действия при использовании нижеследующего уравнения:
скорректированный объемный коэффициент полезного действия = (определенная скорость подвижного узла * текущий объемный коэффициент полезного действия) / расчетная скорость подвижного узла.
Текущий объемный коэффициент полезного действия можно вывести на основании одной или нескольких скоростей погрузочно-разгрузочного транспортного средства, направления вращения насоса, а также давления, температуры и/или вязкости жидкости под давлением.
Неподвижный элемент может составлять неподвижный сварной узел мачты, соединенный с приводным блоком.
Подъемное устройство может дополнительно содержать по меньшей мере один подвижный сварной узел мачты и подвижный узел может содержать узел каретки вил, который перемещается относительно неподвижного элемента несущей опорной конструкции.
В соответствии с четвертым аспектом настоящего изобретения предлагается погрузочно-разгрузочное транспортное средство, содержащее: несущую конструкцию, включающую в себя неподвижный элемент; подвижный узел, соединенный с несущей конструкцией; гидравлическую систему и устройство управления. Несущая конструкция может дополнительно содержать подъемное устройство для осуществления перемещения подвижного узла относительно неподвижного элемента несущей конструкции. Подъемное устройство может включать в себя по меньшей мере один узел плунжерного цилиндра. Гидравлическая система может включать в себя двигатель и насос, соединенный с двигателем для подачи жидкости под давлением по меньшей мере к одному узлу плунжерного цилиндра. Устройство управления может измерять величину электрического тока к двигателю гидравлической системы или от него и уменьшать рабочую скорость двигателя гидравлической системы, если величина электрического тока к двигателю гидравлической системы или от него превышает заранее установленное предельное значение или равняется ему.
В соответствии с пятым аспектом настоящего изобретения предлагается погрузочно-разгрузочное транспортное средство, содержащее: несущую конструкцию, включающую в себя неподвижный элемент; подвижный узел, соединенный с несущей конструкцией; и устройство управления. Несущая конструкция дополнительно содержит подъемное устройство для осуществления перемещения подвижного узла относительно неподвижного элемента несущей конструкции. Подъемное устройство включает в себя гидравлический узел, содержащий по меньшей мере один узел плунжерного цилиндра, по меньшей мере один трубопровод для рабочей жидкости, сообщающийся по меньшей мере с одним узлом плунжерного цилиндра, и гидравлическую систему, которая подает жидкость под давлением по меньшей мере к одному узлу плунжерного цилиндра через по меньшей мере один трубопровод для рабочей жидкости. Устройство управления контролирует гидравлическую жидкость в гидравлическом узле и выполняет ответную процедуру, если контролируемое давление рабочей жидкости в гидравлическом узле падает ниже предельного давления.
предельное давление может зависеть по меньшей мере от максимальной высоты подъема подвижного узла или веса груза, перемещаемого несущей конструкцией.
предельное давление можно рассчитать по следующему уравнению:
TP (фунты на квадратный дюйм) = [A (фунты на квадратный дюйм/фунт) * груз (фунты)] / 100 (безразмерная величина) + [(высота (дюймы) * 100 (безразмерная величина)] / В (дюймы/фунты на квадратный дюйм),
где TP - предельное давление, A - константа, груз - вес груза, перемещаемого на несущей конструкции, 100 - коэффициент масштабирования безразмерный, высота - максимальная высота подъема подвижного узла, 100 - коэффициент масштабирования безразмерный и B - константа.
Устройство управления может только выполнять ответную процедуру, если определяется, что несущая конструкция опускается со скоростью равной или превышающей заранее установленную скорость.
Ответная процедура может включать в себя операцию управлением работой по меньшей мере одного клапана, выполняемую контроллером, для управления опусканием несущей конструкции.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 представляет вид сверху погрузочно-разгрузочного транспортного средства, в котором мономачта выполнена в соответствии с настоящим изобретением.
Фиг.2 представляет вид спереди транспортного средства, изображенного на фиг.1, с поднятым узлом каретки вил.
Фиг.3 представляет увеличенный вид сверху мономачты, изображенной на фиг.1.
Фиг.4 представляет вид сбоку верхней части мономачты в частичном разрезе.
Фиг.5 представляет вид в перспективе сбоку верхней части мономачты, в частичном разрезе.
Фиг.6 представляет вид сбоку мономачты в частичном разрезе.
Фиг.7 представляет вид в перспективе сбоку, показывающий мономачту и часть узла каретки вил.
Фиг.8 представляет вид в перспективе сбоку, показывающий узел каретки вил, соединенный с мономачтой, изображенной на фиг.1.
Фиг.9 представляет схему, изображающую двигатель, насос, контроллер, электронный нормально закрытый двухпозиционный электромагнитный клапан, первый и второй электронные нормально закрытые пропорциональные электромагнитные клапаны, подъемное устройство сварного узла мачты и подъемное устройство узла каретки вил.
Фиг.10A и 10B представляют блок-схему, иллюстрирующую этапы процесса, выполняемые контроллером в соответствии с настоящим изобретением.
Фиг.11 представляет результаты испытания транспортного средства, выполненного в соответствии с настоящим изобретением.
Фиг.12 представляет изображение в разобранном виде мачты, подъемного устройства сварного узла мачты и подъемного устройства узла каретки вил транспортного средства по второму варианту осуществления настоящего изобретения.
Фиг.13 представляет схему, иллюстрирующую двигатель, насос, контроллер, электронный нормально закрытый двухпозиционный электромагнитный клапан, первый, второй и третий электронные нормально закрытые пропорциональные электромагнитные клапаны, подъемное устройство сварного узла мачты и подъемное устройство узла каретки вил транспортного средства по второму варианту осуществления настоящего изобретения.
Фиг.14 представляет блок-схему, иллюстрирующую этапы процесса, выполняемые в соответствии с настоящим изобретением.
СПОСОБЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Фиг.1 представляет вид сверху погрузочно-разгрузочного транспортного средства 100, содержащего управляемый подъемник-загрузчик 100. Мономачта 200, подъемное устройство 220 сварного узла мачты, устройство 300 каретки вил и подъемное устройство 400 каретки вил, выполненные в соответствии с первым вариантом осуществления настоящего изобретения, которые входят в состав управляемого подъемник-загрузчик 100, см. также фиг.3 и 9.
Подъемник-загрузчик 100 дополнительно включает в себя приводной узел транспортного средства 102, см. фиг.1 и 2. Приводной узел 102 содержит батарею (не показана) для подачи энергии к тяговому двигателю, соединенному с управляемым (поворотным) колесом (не показан), установленным около первого угла на задней части 102A приводного узла 102. Ролик (не показан) установленный у второго угла в задней части 102A приводного узла 102 является самоустанавливающимся роликами. На раме 210 мономачты устанавливается пара консольных балок 202 и 204, см. фиг.2. Консольные балки 202 и 204 оснащаются опорными колесами 202A и 204A. Батарея также подает энергию к двигателю 301 механизма подъема механизма подъема, который приводит в движение гидравлический насос 302 рабочей жидкости гидросистемы механизма подъема, см. фиг.9. Ниже следует более подробное описание, насос 302 рабочей жидкости гидросистемы механизма подъема подает рабочую жидкость (гидросистемы) под давлением к подъемному устройству 400 узла каретки вил и к подъемному устройству 220 сварного узла мачты. Несмотря на отсутствие изображения, может предоставляться дополнительный двигатель и насос для подачи рабочей жидкости гидросистемы под давлением к вспомогательным механизмам, например, к механизму бокового смещения, механизму наклона и/или механизму выдвижения вил.
Приводной узел 102 транспортного средства включает в себя кабину 110 оператора. Оператор, стоя в кабине 110, может управлять направление движения подъемника-загрузчика 100 Т-образным рулем (штурвалом) 120. Оператор также может управлять скоростью движения подъемника-загрузчика 100, высотой, выдвижением, наклоном и боковым смещением первых и вторых вил 402 и 404 через многофункциональный блок управления 130, см. фиг.1. Первые и вторые вилы 402 и 404 являются частью узла каретки вил 300.
Мономачту 200 можно сделать как в заявке на патент США №2010/0065377 A1, с названием «Monomast for a Materials Handling Vehicle», поданной 10 сентября 2009 года, полное описание которой приводится в данном документе в качестве ссылки. Вкратце, мономачта 200 содержит сварной узел 230 первой неподвижной секции мачты (также называемую в данном документе неподвижным элементом), вторую сварную секцию 240 мачты, установленную с возможностью выдвижения поверх сварного узла 230 первой секции, и сварной узел 250 третьей секции мачты, установленную с возможностью выдвижения поверх сварных узлов 230 и 240 первой и второй секций мачты, см. фиг.1 и 3-5. Подъемное устройство сварного узла 220 мачты осуществляет подъем сварных узлов 240 и 250 второй и третьей секций мачты относительно неподвижного сварного узла 230 первой секции, см. фиг.9.
В данном документе несущая конструкция определяется, как содержащая приводной узел 102, неподвижный первый сварной узел 230 мачты и подъемное устройство. Подъемное устройство определяется в данном документе, как содержащее второй и третий сварные узлы 240 и 250 мачты, подъемное устройство сварного узла мачты 220 и подъемное устройство 400 узла каретки вил.
Подъемное устройство 220 сварного узла мачты содержит узел 222 гидравлического плунжерного цилиндра, содержащий цилиндр 222A и поршень 222B, см. фиг.4-6. Цилиндр 222A неподвижно соединяется с основанием 1239, образующим сварной узел 230 первой секции мачты, см. фиг.6. Таким образом, цилиндр 222A не перемещается вертикально относительно приводного узла 102 транспортного средства.
Контактная пластина 1300 узла 302 шкива соединяется с оконечной частью 1222B поршня 222B, см. фиг.4. Узел 302 шкива дополнительно содержит первую и вторую вертикальные пластины 1310 и 1312, которые прикрепляются к пластине сцепления 1300 сваркой. Шкив или ролик 314 помещается между первой и второй вертикальными пластинами 1310 и 1312 и соединен с ними с возможностью вращения. Узел 302 шкива неподвижно соединен со сварным узлом 240 второй секции соединительным средством (не показан). Первая и вторая цепи 500 и 502 соединяются с одних концов (на фиг.6 четко изображается только первый конец 500A первой цепи 500) с креплениями цепи (не показаны), которые, в свою очередь, прикрепляются болтами к кронштейну 510 приваренному к цилиндру 222A гидравлического плунжерного цилиндра 222, см. фиг.6. Противоположные вторые концы первой и второй цепей 500 и 502 (на фиг.6 четко виден только второй конец 500 В первой цепи 500) соединяются с нижней частью сварного узла 250 третьей секции через соединительные фиксаторы (анкеры) 504 и 506, см. фиг.2 и 6. Первая и вторая цепи 500 и 502 проходят по шкиву или ролику 314 узла 302 шкива, см. фиг.4. Когда поршень 222B выдвигается, он приводит узел 302 шкива в движение в вертикальном направлении вверх, таким образом, чтобы шкив 314 тянул вверх первую и вторую цепи 500 и 502. Поскольку шкив 314 прикладывает к цепям 500 и 502 силу, направленную вверх, сварной узел 240 второй секции перемещается вертикально относительно сварного узла 230 первой секции, а сварной узел 250 третьей секции перемещается вертикально относительно сварных узлов 230 и 240 первой и второй секций. Для каждого вертикального перемещения сварного узла 240 второй секции относительно сварного узла 230 первой секции, сварной узел 250 третьей секции перемещается вертикально на две единицы относительно сварного узла 230 первой секции.
Узел 300 каретки вил, также называемый в данном документе подвижным узлом, соединяется со сварным узлом 250 третьей секции для вертикального перемещения относительно сварного узла 250 третьей секции, см. фиг.7. Узел 300 каретки вил также перемещается вертикально со сварным узлом 250 третьей секции относительно сварных узлов 230 и 240 первой и второй секций. Узел 300 каретки вил содержит механизм 310 каретки вил, на который устанавливаются первые и вторые вилы 402 и 404, см. фиг.8. Механизм 310 каретки вил присоединяется к механизму 320 выдвижения вил, который, в свою очередь, устанавливается на узел 330 главной каретки, см. фиг.7 и 8. Узел 330 главной каретки содержит основную секцию (блок) 332, имеющую множество роликов 334, которые помещаются в направляющих дорожках 350, сделанных на противоположных наружных боковых поверхностях 250B и 250C сварного узла 250 третьей секции, см. фиг.3 и 7. Как отмечалось выше вспомогательные механизмы, например, механизм бокового перемещения, механизм наклона и/или механизм выдвижения вил могут предусматриваться для бокового перемещения, наклона и/или выдвижения вил 402 и 404.
Подъемное устройство 400 узла каретки вил содержит гидравлический плунжерный цилиндр 410, включающий в себя цилиндр 412 и поршень 414, см. фиг.7. Цилиндр 412 неподвижно соединяется с боковой частью 257D сварного узла 250 третьей секции. Первый и второй шкивы 420 и 422 соединяются с верхним концом поршня 414, см. фиг.7. Подъемная цепь 440 проходит по первому шкиву 420 и соединяется с одного конца 440A с цилиндром 412 посредством крепления цепи и кронштейну 441, приваренному к цилиндру 412, и своим вторым концом 440B к узлу 330 главной каретки см фиг.7. Вертикальное перемещение поршня 414 приводит к вертикальному перемещению всего узла 300 каретки вил относительно сварного узла 250 третьей секции. Для каждого вертикального перемещения поршня 414 и первого шкива 420 на одну единицу относительно сварного узла 250 третьей секции, узел каретки вил 300 перемещается вертикально на две единицы относительно сварного узла 250 третьей секции.
Погрузочно-разгрузочное транспортное средство 100 содержит гидравлическую систему 401, содержащую двигатель 301 механизма подъема, который приводит в движение гидравлический насос 302 рабочей жидкости гидросистемы механизма подъема, как отмечалось выше. Двигатель 301 механизма подъема содержит датчик скорости (оборотов в минуту). Насос 302 подает рабочую жидкость гидросистемы под давлением к гидравлическому плунжерному цилиндру 222 подъемного устройства 220 сварного узла мачты и к гидравлическому плунжерному цилиндру 410 подъемного устройства 400 узла каретки вил.
Гидравлическая система 401 дополнительно содержит бак 402 для рабочей жидкости гидросистемы, см. фиг.9, который размещается в приводном узле 102, и шланги/трубопроводы для жидкости 411A-411C, соединенные между насосом 302, гидравлическим плунжерным цилиндром 222 подъемного устройства сварного узла мачты и гидравлическим плунжерным насосом 410 подъемного устройства узла каретки вил. Шланги/трубопроводы для жидкости 411A и 411B соединяются последовательно и функционируют в качестве трубопроводов подачи/возврата между насосом 302 и гидравлическим плунжерным цилиндром 222 конструкции сварного узла мачты. Шланги/трубопроводы для жидкости 411A и 411C соединяются последовательно и используются в качестве трубопроводов подачи/возврата между насосом 302 и гидравлическим плунжерным цилиндром 410 подъемного устройства узла каретки вил. Поскольку шланг/трубопровод для жидкости 411A непосредственно соединяется с двумя шлангами/трубопроводами для жидкости 411B и 411C, все три трубопровода 411A-411C постоянно находятся по существу под одинаковым давлением жидкости.
Гидравлическая система 401 также содержит электронный нормально закрытый двухпозиционный электромагнитный клапан 420 и первый и второй электронные нормально закрытые пропорциональные электромагнитные клапаны 430 и 440. Клапаны 420, 430 и 440 соединяются с электронным контроллером 1500 для управления их работой, см. фиг.9. Электронный регулятор 1500 является частью «устройства управления». К нормально закрытому двухпозиционному электромагнитному клапану 420 подается энергия блоком регулирования 1500 только при опускании одного или двух поршней 222B и 414. При прекращении подачи энергии электромагнитный клапан 420 используется в качестве обратного клапана для блокирования вытекания жидкости под давлением из трубопровода 411A через насос 302 и обратно в бак 402, то есть используется для предупреждения смещения вниз узла 300 каретки вил и обеспечивает течение жидкости под давлением к цилиндрам 222A и 412 через трубопроводы 411A-411C во время подъема.
Первый электронный нормально закрытый пропорциональный электромагнитный клапан 430 располагается внутри и непосредственно соединяется с основанием 1222 А цилиндра 222A узла 222 гидравлического плунжерного цилиндра подъемного устройства сварного узла мачты, см. фиг.9. Второй электронный нормально закрытый пропорциональный электромагнитный клапан 440 располагается внутри и непосредственно соединен с основанием 412A цилиндра 412 узла 410 гидравлического плунжерного цилиндра подъемного устройства узла каретки вил. К первому нормально закрытому пропорциональному электромагнитному клапану 430 подается энергия, то есть в открытом состоянии, блоком регулирования 1500, когда поршень 222B необходимо опустить. Ко второму нормально закрытому пропорциональному электромагнитному клапану 440 подается энергия, то есть в открытом состоянии, регулятором 1500, когда поршень 414 необходимо опустить. При прекращении подачи энергии первый и второй нормально закрытые пропорциональные электромагнитные клапаны 430 и 440 используются в качестве обратных клапанов для блокирования вытекания жидкости под давлением из цилиндров 222A и 412. Клапаны 430 и 440 при использовании в качестве обратных клапанов также обеспечивают течение рабочей жидкости под давлением в цилиндры 222A и 412 во время подъема.
Когда команда на подъем подается оператором через многофункциональный блок управления 130 цилиндр 412 подъемного устройства 400 узла каретки вил и цилиндр 222A подъемного устройства 220 сварного узла мачты подвергаются воздействию рабочей жидкости гидросистемы при одинаковом давлении через трубопроводы 411A-411C. Поскольку поршень 414 подъемного устройства 400 узла каретки вил и поршень 222B подъемного устройства 220 сварного узла мачты включают в себя опорные концы, имеющие по существу одинаковые площади поперечного сечения и предназначенные для всех режимов нагрузки, для приведения подъемного устройства 400 узла каретки вил в действие требуется более низкое давление, чем для подъемного устройства 220 сварного узла мачты, поршень 414 подъемного устройства 400 узла каретки вил будет перемещаться первым до тех пор, пока узел 300 каретки вил не достигнет своей максимальной высоты относительно сварного узла 250 третьей секции. Затем сварные узлы 240 и 250 второй и третьей секций начнут перемещаться вертикально относительно сварного узла 230 первой секции.
При подаче оператором команды на опускание через многофункциональный блок управления 130, электронный регулятор 1500 приводит к открытию электронного нормально закрытого двухпозиционного электромагнитного клапана 420. Предположим, что поршни 222B и 414 полностью выдвигаются при подаче команды на опускание, к первому пропорциональному клапану 430 подается энергия регулятором 1500, приводя к его полному открытию в иллюстрируемом варианте осуществления для выпуска жидкости из цилиндра 222A подъемного устройства 220 сварного узла мачты, обеспечивая тем самым опускание сварных узлов 240 и 250 второй и третьей секций. Когда сварные узлв 240 и 250 второй и третьей секций находятся в своих крайних нижних положениях, регулятор 1500 приводит к по существу полному открытию второго пропорционального клапана 440 и к частичному закрытию первого пропорционального клапана 430. Частичное закрытие первого клапана 430 приводит к снижению давления жидкости в трубопроводах 411A-411C. При открытии второго клапана 440 и частичном закрытии первого клапана 430, поршень 414 начинает опускаться, а поршень 222 В продолжает опускаться. После того, как поршень 222В достигает своего крайнего нижнего положения, поршень 414 продолжает опускаться до тех пор, пока узел 300 каретки вил не достигнет своего крайнего нижнего положения. За исключением частичного закрытия первого пропорционального клапана 430, когда сварные узлы 240 и 250 второй и третьей секций находятся в своих крайних нижних положениях, скорость, при которой жидкость дозируется из цилиндра 222A подъемного устройства 220 сварного узла мачты и из цилиндра 412 подъемного устройства 400 узла каретки вил, обычно регулируется при помощи насоса 302.
Предусматриваются первый и второй блоки 600 и 602 датчика положения, соответственно, также являющиеся частью «устройства управления», и могут содержать обычные узлы датчика положения с фрикционным колесом или стандартные проводные/кабельные узлы датчика положения, см. фиг.9. В изображенном варианте осуществления первый блок 600 датчика положения содержит первый узел датчика положения с фрикционным колесом, установленный на сварной узел 250 третьей секции таким образом, чтобы первое фрикционное колесо сцеплялось и перемещалось по сварному узлу 240 второй секции. Следовательно, по мере перемещения сварного узла 250 третьей секции относительно сварного узла 240 второй секции, первый узел датчика положения с фрикционным колесом генерирует импульсы для регулятора 1500, указывающие на перемещение сварного узла третьей секции относительно сварного узла 240 второй секции.
Также в проиллюстрированном варианте осуществления второе блок 602 датчика положения содержит узел второго фрикционного колеса, установленный на узле 300 каретки вил таким образом, чтобы второе фрикционное колесо контактировало и перемещалось по сварному узлу 250 третьей секции мачты. Следовательно, по мере перемещения узла 300 каретки вил относительно сварного узла 250 третьей секции, второй датчик положения с фрикционным колесом генерирует импульсы для регулятора 1500, указывающие на перемещение узла 300 каретки вил относительно сварного узла 250 третьей секции.
Как отмечалось выше, первый и второй блоки 600 и 602 датчика положения генерируют соответствующие импульсы для регулятора 1500. Импульсы, генерируемые первым блоком 600 датчика положения, используются регуляторам 1500 для определения положения сварного узла 250 третьей секции относительно сварного узла 240 второй секции, а также скорости перемещения сварного узла 250 третьей секции относительно сварного узла 240 второй секции. Регулятор 1500 также определяет скорость и положение сварного узла 250 третьей секции относительно неподвижного сварного узла 230 первой секции, где скорость сварного узла 250 третьей секции относительно сварного узла 230 первой секции в два раза превышает скорость сварного узла 250 третьей секции относительно сварного узла 240 второй секции. Кроме того, расстояние от точки начала отсчета на сварном узле 250 третьей секции до точки начала отсчета на сварном узле 230 первой секции в два раза превышает расстояние от точки начала отсчета на сварном узле 240 третьей секции до точки начала отсчета на сварном узле 230 второй секции, где точка точки начала отсчета на сварном узле 240 второй секции находится в месте, которое соответствует расположению точки начала отсчета на сварном узле 230 первой секции. Импульсы, генерируемые вторым блоком 602 датчика положения, используются регулятором 1500 для определения положения узла 300 каретки вил относительно сварного узла 250 третьей секции мачты, а также скорости перемещения узла 300 каретки вил относительно сварного узла 250 третьей секции мачты. Зная скорость и положение сварного узла 250 третьей секции относительно сварного узла 230 первой секции и скорость и положение узла 300 каретки вил относительно сварного узла 250 третьей секции, регулятор 1500 может легко определить скорость и положение узла 300 каретки вил относительно сварного узла 230 первой секции.
В соответствии с настоящим изобретением во время команды на опускание регулятор 1500 сравнивает определенную или измеренную скорость узла 300 каретки вил относительно сварного узла 230 первой секции с первой и второй граничными скоростями. Эта команда использует регулятор 1500, который определяет первую скорость, содержащую определенную или измеренную скорость сварного узла 250 третьей секции относительно сварного узла 230 первой секции, определяет вторую скорость, содержащую определенную или измеренную скорость узла 300 каретки вил относительно сварного узла 250 третьей секции, а также суммирование первой и второй определенных скоростей для расчета третьей определенной скорости. Третья определенная скорость равняется определенной или измеренной скорости узла 300 каретки вил относительно сварного 230 первой секции.
Как отмечалось выше, для каждого вертикального перемещения сварного узла 240 второй секции относительно сварного узла 230 первой секции, сварной узел 250 третьей секция перемещается вертикально на две единицы относительно сварного узла 230 первой секции. Для того чтобы определить первую скорость, регулятор 1500 определяет скорость сварного узла 250 третьей секции относительно сварного узла 240 второй секции при использовании импульсов от первого блока 600 датчика положения, как отмечалось выше, и умножает определенную скорость перемещения сварного узла 250 третьей секции относительно сварного узда 240 второй секции на «2». Таким образом, это обеспечивает первую скорость, то есть определенную скорость сварного узла 250 третьей секции относительно сварного узла 230 первой секции.
Вторая скорость равняется определенной скорости перемещения узла 300 каретки вил относительно сварного узла третьей секции мачты при использовании импульсов, генерируемых вторым блоком 602 датчика положения, как отмечалось выше.
Во время выполнения команды на опускание регулятор 1500 может сравнивать третью определенную скорость, то есть определенную скорость узла 300 каретки вил относительно сварного узла 230 первой секции, с первой и второй граничными скоростями. В проиллюстрированном варианте осуществления сравнение третьей определенной скорости с первой и второй граничными скоростями может осуществляться регулятором 1500 один раз в течение каждого заранее установленного периода времени, например, каждые 5 миллисекунд. Сравнение третьей определенной скорости с первой и второй граничными скоростями называется в данном документе «событием сравнения». Если третья определенная скорость превышает первую предельную скорость во время выполнения заранее установленного количества последовательных событий сравнения, например, от 1 до 50 событий сравнения, или превышает вторую предельную скорость во время выполнения одного события сравнения, в таком случае регулятор 1500 выполняет ответную процедуру, в которой регулятор (блок управления) прекращает подачу энергии к первому и второму электронным нормально закрытым пропорциональным электромагнитным клапанам 430 и 440, чтобы предупредить дальнейшее опускание поршней 222В и 414. Регулятор 1500 может перевести первый и второй клапаны 430 и 440 из их активных рабочих открытых положений к их закрытым положениям незамедлительно или по истечении дополнительного периода времени, например, от примерно 0,3 секунды до примерно 1,0 секунды. При закрытии первого и второго клапанов 430 и 440 по истечении дополнительно периода времени, величина пиков давления внутри цилиндров 222A и 412, которые возникают, когда поршни 222B и 414 прекращают опускаться внутри цилиндров 222A и 412, уменьшается. Более того, закрытие первого и второго клапанов 430 и 440 регулятором 1500 может содержать частичное закрытие первого и второго клапанов 430 и 440, то есть неполное закрытие первого и второго клапанов 430 и 440 для обеспечения медленного опускания на землю узла 300 каретки вил и сварных узлов 240, 250 второй и третьей секций. Предполагается, когда третья определенная скорость превышает первую или вторую граничные скорости, узел 300 каретки вил перемещается слишком быстро относительно сварного узла 230 первой секции, то есть с непредусмотренной скоростью опускания, такое условие может возникнуть при снижении гидравлического давления в жидкости, которая дозируется из одного или двух цилиндров 222A и 412. Снижение гидравлического давления может быть вызвано разрывом одного из трубопроводов для жидкости 411A-411C.
В дополнительном варианте осуществления регулятор 1500 сравнивает третью определенную скорость, то есть определенную скорость узла 300 каретки вил относительно сварного узла 230 первой секции только с первой предельной скоростью. Сравнение третьей определенной скорости с первой предельной скоростью осуществляется регулятором 1500 один раз в течение каждого заранее установленного периода времени, например, каждые 5 миллисекунд. Сравнение третьей определенной скорости с первой предельной скоростью также называется в данном документе «событием сравнения». Если третья определенная скорость превышает первую предельную скорость, во время выполнения заранее установленного количества последовательных событий сравнения, например, от 1 до 50 событий сравнения, в таком случае электронный регулятор 1500 выполняет ответную процедуру, в которой регулятор 1500 прекращает подачу энергии к первому и второму электронным нормально закрытым пропорциональным электромагнитным клапанам 430 и 440 для предупреждения дальнейшего опускания поршней 222B и 414.
Первую предельную скорость можно определить посредством электронного регулятора 1500, как изложено ниже. Во-первых, регулятор 1500 может рассчитывать величину суммарной скорости опускания поршня 222B подъемного устройства 220 сварного узла мачты и поршня 414 подъемного устройства 400 узла каретки вил по скорости двигателя 301 механизма подъема. Как обсуждалось выше в отношении опускания при использовании узла 300 каретки вил и полностью выдвинутых сварных узлов 240 и 250 второй и третьей секций, поршень 222B начинает опускаться первым, затем поршни 222B и 414 опускаются одновременно во время опускания секций до тех пор, пока поршень 222 В не достигнет своего крайнего нижнего положения. Затем поршень 414 продолжает опускаться до тех пор, пока он не достигнет своего крайнего нижнего положения.
Во-первых, регулятор 1500 пересчитывает скорость подъемного двигателя в скорость потока жидкости насоса механизма подъема при использовании нижеследующего уравнения:
скорость потока жидкости насоса (галлоны/минута) = [(скорость двигателя механизма подъема (число оборотов в минуту)) * (производительность насоса механизма подъема (куб. см/оборот)) * (объемный коэффициент полезного действия двигателя механизма подъема)] / (3786 куб. см/гал).
Регулятор 1500 может определить расчетную линейную скорость опускания (величину) узла 300 каретки вил относительно сварного узла 230 первой секции при использовании нижеследующего уравнения, предполагается, что данное уравнение применимо для всех фаз опускания, включая опускание секций, когда оба поршня 222B и 414 опускаются одновременно:
расчетная линейная скорость узла 300 каретки вил относительно первого сварного узла 230 (дюймы/секунда) = [(скорость потока жидкости насоса (галлоны/минута)) * (231 дм3/галлон) * (отношение скоростей)] / [(внутренняя площадь цилиндра (дм2)) * (60 секунд/минута)]
где,
«внутренняя площадь цилиндра» = площадь поперечного сечения цилиндра 222B, которая равняется площади поперечного сечения цилиндра 412 (в уравнении используется только площадь поперечного сечения одного цилиндра);
«отношение скоростей» = (скорость третьего сварного узла/скорость первого сварного узла) = (скорость узла каретки вил/скорость третьего сварного узла) = 2/1 в иллюстрированном варианте осуществления.
В иллюстрируемом варианте осуществления первая предельная скорость равняется расчетной скорости устройства узла 300 каретки вил относительно первого сварного узла 230, умноженной на первый толерантный множитель, например, 1,6 или второй толерантный множитель, например, 1,2. Когда оператор отдает команду через многофункциональный блок управления 130 на опускание узла 300 каретки вил, регулятор 1500 выполняет линейно нарастающую функцию в своем программном обеспечении с целью увеличения скорости опускания узла 300 каретки вил управляемым способом при заранее установленной скорости, например, изменение скорости с примерно 4 футов/минуту до примерно 40 футов/минуту каждые 16 миллисекунд с учетом положения многофункционального блока управления 130 до тех пор, пока не будет достигнута заданная скорость опускания. Первый толерантный множитель используется, когда скорость опускания узла каретки вил находится в процессе изменения до заданной скорости, то есть регулятор 1500 по-прежнему выполняет линейно нарастающую функцию, а второй толерантный множитель используется, когда регулятор 1500 больше не увеличивает скорость двигателя 301 механизма подъема, то есть регулятор 1500 завершил выполнение линейно нарастающей функции. Первый толерантный множитель больше второго толерантного множителя для вычисления времени физической задержки, возникающей, когда оператор подает команду на изменение скорости и фактическую скорость узла каретки вил. Также предполагается, что в альтернативном варианте осуществления первая предельная скорость может равняться расчетной скорости узла 300 каретки вил относительно первого сварного узла.
Регулятор 1500 может использовать определенную скорость опускания узла каретки вил относительно сварного узла первой секции, расчетную скорость опускания узла каретки вил относительно первого сварного узла и текущий объемный коэффициент полезного действия насоса для создания скорректированного объемного коэффициента полезного действия насоса, обновленный объемный коэффициент полезного действия насоса может использоваться регулятором 1500 при последующем пересчете скорости подъемного двигателя в скорость потока жидкости насоса. Регулятор 1500 может определять скорректированный объемный коэффициент полезного действия насоса при использовании нижеследующего уравнения:
скорректированный объемный коэффициент полезного действия насоса = (определенная скорость узла каретки вил * текущий объемный коэффициент полезного действия) / (расчетная скорость узла каретки вил).
Начальный объемный коэффициент полезного действия насоса, то есть объемный коэффициент полезного действия, используемый при первой активации регулятора 1500 и объемный коэффициент полезного действия, впервые применяемый в вышеприведенном уравнении, как «текущий объемный коэффициент полезного действия», скорректированный объемный коэффициент полезного действия насоса первый раз рассчитывается, например, после первого опускания, может составлять 95% или любое другое соответствующее значение. Начальный объемный коэффициент полезного действия насоса может храниться в памяти, связанной с регулятором 1500. В соответствии с другим аспектом изобретения вместо использования одного начального объемного коэффициента полезного действия насоса, в таблице данных или в справочной таблице могут храниться множество объемных коэффициентов полезного действия, которые соответствуют, например, скорости подъемника-загрузчика 100 несмотря на то, что можно использовать другие состояние транспортного средства, например, давление рабочей жидкости, температура рабочей жидкости, вязкость рабочей жидкости, направление вращения гидравлического насоса 302 рабочей жидкости гидросистемы и так далее. Правильный объемный коэффициент полезного действия, основанный на соответствующем одном или нескольких состояниях транспортного средства, можно посмотреть в таблице данных и применить как начальный объемный коэффициент полезного действия насоса с целью расчета скорректированного объемного коэффициента полезного действия насоса. Следует отметить, что использование начального объемного коэффициента полезного действия насоса не ограничивается только однократным использованием для каждого опускания, то есть начальный объемный коэффициент полезного действия насоса можно использовать при генерировании скорректированного объемного коэффициента полезного действия насоса для нескольких применений вышеприведенного уравнения. Например, начальный объемный коэффициент полезного действия насоса можно использовать при генерировании скорректированного объемного коэффициента полезного действия насоса в течение заранее установленного периода времени, например, первые 0,5 секунды после начала опускания.
Вторая предельная скорость может содержать фиксированную скорость, например, 300 футов/минуту. При перемещении узла 300 каретки вил со скоростью равной или превышающей 300 футов/минуту предполагается, что он перемещается с непредусмотренной, превышенной скоростью.
Как показано на фиг.10A и 10B, блок-схема представляет процесс 700, осуществляемый регулятором 1500 для управления работой первого и второго электронных нормально закрытых пропорциональных электромагнитных клапанов 430 и 440 во время выполнения команды на опускание. На этапе 701 при задействовании транспортного средства 100, регулятор 1500 считывает долговременную память (не показана), связанную с регулятором 1500 с целью определения значения, хранимого в первой ячейке «блокировки» памяти. Если во время предыдущей работы транспортного средства 100, регулятор 1500 определил, что «предельный отсчет», который будет обсуждаться ниже, превысил «максимально предельный отсчет», например, 40, регулятор 1500 установит значение в первой ячейке блокировки памяти на "1". Если нет, значение в первой ячейке блокировки памяти останется установленным на "0".
Если регулятор 1500 определяет во время выполнения условия 701, что значение в первой ячейке блокировки памяти является "0", регулятор 1500 далее определяет во время выполнения условия 702 превышает ли величина третьей определенной скорости фиксированную нижнюю предельную скорость, например, 60 футов/минуту, и указывает ли направление движения двигателя 301 механизма подъема, как указано датчиком скорости (отмечалось выше), связанным с двигателем 301, что узел каретки вил 300 опускается. Если ответом на один или оба запроса является "НЕТ", то значение «предельного отсчета» устанавливается на "0", смотрите этап 703, и регулятор 1500 возвращается к условию 702. Условие 702 можно непрерывно повторять один раз в течение каждого заранее установленного периода времени, например, каждые 5 миллисекунд. Если ответом на оба запроса является "ДА", то регулятор 1500 определяет на условие 704 изменяется ли линейно заданная оператором скорость опускания для узла 300 каретки вил, то есть выполняется ли линейно нарастающая функция. Если ответом является "ДА", то используется первый толерантный множитель и первая предельная скорость равняется расчетной скорости узла 300 каретки вил относительно первого сварного узла 230, умноженной на первый толерантный множитель, см. условие 705. Если ответом является "НЕТ", то используется второй толерантный множитель и первая предельная скорость равняется расчетной скорости узла 300 каретки вил относительно первого сварного узла 230, умноженной на второй толерантный множитель, см. этап 706.
После расчета первой предельной скорости регулятор 1500 определяет во время выполнения условия 707, является ли третья определенная скорость больше первой предельной скорости. Если "НЕТ", то регулятор 1500 устанавливает значение «предельного отсчета» на "0" и возвращается к условию 704. Если "ДА", то есть регулятор 1500 определяет, что третья определенная скорость превышает первую предельную скорость, регулятор 1500 увеличивает «предельный отсчет» на «1», см. условие 709. На этапе 711 регулятор 1500 определяет, является ли «предельный отсчет» больше «максимально предельного отсчета» или является ли третья определенная скорость больше второй предельной скорости. Если ответом на оба запроса является "НЕТ", то регулятор 1500 возвращается к условию 704. Условия 704 и 707 можно непрерывно повторять один раз в течение каждого заранее установленного периода времени, например, каждые 5 миллисекунд. Если ответом на один или оба запроса является "ДА", то регулятор 1500 выполняет ответную процедуру, где регулятор 1500 прекращает подачу энергии к первому и второму электронным нормально закрытым пропорциональным электромагнитным клапанам 430 и 440, см. условие 713. Как отмечалось выше, клапаны 430 и 440 можно закрыть по истечении дополнительного периода времени, например, примерно от 0,3 секунды примерно до 1,0 секунды.
После закрытия клапанов 430 и 440, регулятор 1500 определяет на основании импульсов, генерируемых блоками 600 и 602 датчиков положения, высоту подъема узла 300 каретки вил относительно сварного узла 430 первой секции и определяет эту высоту в долговременной памяти, как первую «контрольную высоту», см. условие 714. регулятор 1500 также устанавливает значение в первой ячейке блокировки памяти на "1", см. условие 716, как возникшую непредусмотренную ошибку опускания. Пока значение в первой ячейке блокировки памяти установлено на "1", регулятор 1500 не будет обеспечивать подачу энергии к клапанам 430 и 440 для того, чтобы они оставались открытыми для обеспечения опускания узла 300 каретки вил. Однако регулятор 1500 будет обеспечивать, в ответ на генерируемую оператором команду на подъем, подачу жидкости под давлением в цилиндры 222A и 412, которая проходит через клапаны 430 и 440.
В случае возникновения непредусмотренной ошибки опускания и в ответ на генерируемую оператором команду на подъем узла 300 каретки вил, один или оба поршня 222А и 414 будут не в состоянии поднять узел 300 каретки вил, в таком случае значение в первой ячейке блокировки памяти останется установленным на "1". С другой стороны, если в ответ на подаваемую оператором команду на подъем узла 300 каретки вил, один или оба поршня 222A и 414 способны поднять узел каретки вил 300 выше первой контрольной высоты с прибавлением первой исходной высоты, как указано сигналами, генерируемыми блоками 600 и 602 датчиков положения, регулятор 1500 переустанавливает значение в первой ячейке блокировки памяти на "0", см. условия 718 и 720. Затем регулятор 1500 возвращается к условию 702 и, следовательно, будет обеспечивать подачу энергии к клапанам 430 и 440 для того, чтобы их можно было открыть для обеспечения управляемого опускания узла 300 каретки вил. Перемещение узла 300 каретки вил выше первой контрольной высоты с прибавлением первой исходной высоты указывает на то, что гидравлическая система 401 находится в рабочем состоянии. Первая исходная высота может иметь значение от 0,25 дюйма до примерно 4 дюймов.
Если регулятор 1500 определяет во время выполнения условия 701, что значение в первой ячейке блокировки памяти составляет "1", регулятор 1500 непрерывно контролирует высоту узла 300 каретки вил при помощи сигналов, генерируемых блоками 600 и 602 датчиков положения, для того, чтобы посмотреть, перемещается ли узел 300 каретки вил выше первой контрольной высоты, которая ранее хранилась в памяти с прибавлением первой исходной высоты, см. условие 718.
Фиг.11 иллюстрирует данные, собранные во время работы транспортного средства, сделанного в соответствии с настоящим изобретением. Данные содержат заданную оператором скорость (заданную через многофункциональный блок управления 130), третью определенную скорость, то есть измеренную скорость узла 300 каретки вил относительно сварного узла 230 первой секции и предельную скорость. Была определена расчетная скорость узла 300 каретки вил относительно сварного узла 230 первой секции, где расчетная скорость рассчитывалась при использовании скорости двигателя механизма подъема, как обсуждалось выше. Третья определенная скорость сравнивалась с заданной оператором скоростью в течение каждых 5 миллисекунд. Третья определенная скорость также сравнивалась с предельной скоростью в течение каждых 5 миллисекунд, предельная скорость рассчитывалась посредством умножения расчетной скорости на 1,2. Во время каждого события сравнения, когда третья определенная скорость превышала заданную оператором скорость, увеличивался «старый предельный отсчет». Также во время каждого события сравнения, когда третья определенная скорость превышала предельную скорость, увеличивался «новый предельный отсчет». Когда новый предельный отсчет или старый предельный отсчет превышает число 50, регулятор 1500 выполняет ответную процедуру, когда регулятор 1500 прекращает подачу энергии к первому и второму электронным нормально закрытым пропорциональным электромагнитным клапанам 430 и 440. Как видно из фиг.11, сравнение между третьей определенной скоростью и предельной скоростью привело к нулевым событиям, когда к клапанам 430 и 440 не подавалась энергия. Однако сравнение между третьей определенной скоростью и заданной оператором скоростью привело к двум событиям, когда количество старых предельных отсчетов превысило 50; следовательно, регулятор 1500 прекратил подачу энергии к первому и второму клапанам 430 и 440. Предполагается, что сравнение третьей определенной скорости с заданной оператором скоростью было менее точным, чем сравнение третьей определенной скорости с предельной скоростью. Предполагается, что так происходит по причине собственных задержек, которые возникают в транспортном средстве, начиная с момента, когда оператор отдает команду на изменение скорости узла каретки вил через многофункциональный блок управления 130 и входа жидкости под давлением в цилиндры 222A и 412 или выхода из них.
В изображенном варианте осуществления во время выполнения команды на опускание, регулятор 1500 сравнивает определенную скорость узла 300 каретки вил относительно сварного узла 230 первой секции с первой и второй граничными скоростями. Также предполагается, что во время выполнения команды на опускание, регулятор 1500 может отдельно сравнивать первую скорость, то есть определенную скорость сварного 250 третьей секции относительно сварного узла 230 первой секции с первой и второй граничными скоростями и отдельно сравнивать вторую скорость, то есть определенную скорость узла 300 каретки вил относительно сварного узла 250 третьей секции с первой и второй граничными скоростями. Предполагается, что во время опускания секций может потребоваться уменьшение первой и второй предельных скоростей. Если первая определенная скорость превышает первую предельную скорость во время выполнения заранее установленного количества последовательных событий сравнения, например, от 1 до 50 событий сравнения, или превышает вторую предельную скорость во время выполнения одного события сравнения, в таком случае электронное регулятор 1500 может прекратить подачу энергии к первому и второму электронным нормально закрытым пропорциональным электромагнитным клапанам 430 и 440. Если вторая определенная скорость превышает первую предельную скорость во время выполнения заранее установленного количества последовательных событий сравнения, например, от 1 до 50 событий сравнения, или превышает вторую предельную скорость во время выполнения одного события сравнения, в таком случае электронное устройство 1500 может прекратить подачу энергии к первому и второму электронным нормально закрытым пропорциональным электромагнитным клапанам 430 и 440.
Первая предельная скорость, как рассчитывалось выше, может использоваться регулятором 1500 при сравнении первой скорости с первой предельной скоростью и второй скорости с первой предельной скоростью.
Кроме того, электрический ток, потребляемый или генерируемый двигателем 301 механизма подъема, то есть подача электрического тока к двигателю 301 механизма подъема или выход из него, можно контролировать в соответствии с аспектом изобретения. Контролируемую подачу электрического тока к двигателю 301 механизма подъема или выход из него можно использовать с целью изменения одного или нескольких эксплуатационных параметров подъемника-загрузчика 100. Например, в некоторых условиях, в частности с холодной рабочей жидкостью, допускается слишком большое падение давления в гидравлической системе 401 для того, чтобы двигатель 301 механизма подъема приводил в движение гидравлический насос 302 рабочей жидкости гидросистемы механизма подъема со скоростью, при которой опускается узел 300 каретки вил при заранее установленной, предпочтительной скорости опускания, например, 240 футов/минуту. В частности, гидравлическому насосу 302 механизма подъема необходимо минимальное рабочее давление для обеспечения полного заполнения гидравлического насоса 302 механизма подъема рабочей жидкостью гидросистемы и вращения не быстрее, чем он может заполнять рабочей жидкостью, что может привести к кавитации рабочей жидкости гидросистемы.
Было установлено, что если контролируемая подача электрического тока к двигателю 301 механизма подъема или от двигателя 301 механизма подъема превышает заранее установленное предельное значение, минимальное рабочее давление гидравлического насоса 302 рабочей жидкости гидросистемы может не соответствовать установленному минимальному рабочему давлению, что может указывать на то, что гидравлический насос 302 рабочей жидкости гидросистемы вращается быстрее, чем он может наполнять рабочую жидкость, приводя, таким образом, к кавитации рабочей жидкости, как отмечалось выше. Когда данное условие обнаруживается, то есть когда контролируемая подача электрического тока к двигателю 301 механизма подъема или от него превышает заранее установленное предельное значение, скорость двигателя 301 механизма подъема уменьшается до тех пор, пока подача электрического тока к двигателю 301 механизма подъема или от него не опустится ниже граничного значения. Как только контролируемая величина электрического тока к двигателю 301 механизма подъема или от него становится ниже граничного значения, нормальную рабочую скорость двигателя 301 механизма подъема можно отрегулировать. Посредством контролирования величины электрического тока к двигателю 301 механизма подъема или от двигателя 301, а также регулирования рабочей скорости двигателя 301 механизма подъема, можно предупредить кавитацию рабочей жидкости в гидравлическом насосе 302 рабочей жидкости.
Фиг.14 представляет блок-схему контролирования величины электрического тока к двигателю 301 механизма подъема или от него, а также регулирование рабочих параметров подъемника-загрузчика 100 в соответствии с аспектом изобретения. Условия блок-схемы могут осуществляться или выполняться регулятором 1500, регулятор 1500 может принимать сигналы характерные для электрического тока к двигателю 301 механизма подъема или от него.
По условию 800 контролируется величина электрического тока к двигателю 301 механизма подъема или от него. Данное условие 800 может выполняться, например, каждые 5 миллисекунд, и может выполняться непрерывно во время опускания, как описано в данном документе.
По условию 802 определяется подается ли электрический ток к двигателю 301 механизма подъема или от него на заранее установленном верхнем граничном значении или превышение заранее установленного верхнего граничного значения. В приведенном варианте осуществления, в котором способ используется в рекуперативном опускании, предельное значение может составлять 0 ампер, но могут быть другие пригодные значения или может выражаться в процентах максимальной или минимальной величины электрического тока к двигателю 301 механизма подъема или в процентах от максимальной или минимальной величины электрического тока к или от него.
Если по условию 802 определяется, что величина электрического тока к двигателю 301 механизма подъема или от него ниже заранее установленного верхнего граничного значения, двигатель 301 механизма подъема сохраняет нормальную рабочую скорость при условии 804. Данный цикл условий 800-804 повторяется во время опускания до тех пор, пока величина электрического тока к двигателю 301 механизма подъема или от него не будет равняться или превышать заранее установленное верхнее предельное значение.
Если по условию 802 определяется, что величина электрического тока к двигателю 301 механизма подъема или от него равняется или превышает заранее установленное верхнее предельное значение, скорость двигателя 301 механизма подъема уменьшается по условию 806 до уменьшенной рабочей скорости. Уменьшение скорости двигателя 301 механизма подъема до уменьшенной рабочей скорости приводит к соответствующему уменьшению скорости вращения гидравлического насоса 302 рабочей жидкости гидросистемы. Условие 806 выполняется с целью сокращения или во избежание кавитации рабочей жидкости в гидравлическом насосе 302 рабочей жидкости, как обсуждалось выше.
Двигатель 301 механизма подъема сохраняет уменьшенную рабочую скорость при условии 808 до тех пор, пока величина электрического тока к двигателю 301 механизма подъема или от него не будет находиться ниже заранее установленного нижнего граничного значения.
При снижении величины электрического тока к двигателю 301 механизма подъема или от него ниже заранее установленного нижнего граничного значения, скорость двигателя 301 механизма подъема увеличивается на этапе 810, возвращаясь к нормальной рабочей скорости.
Кроме того, давление рабочей жидкости в подъемнике-загрузчике 100 можно контролировать и сравнивать с граничным давлением TP в соответствии с другим аспектом изобретения во время выполнения команд на подъем и/или опускания или во время других эксплуатационных процедур транспортного средства. Контролируемое давление можно измерить при помощи преобразователя TD (см. фиг.9) или другой сенсорной структуры, расположенной в гидравлическом узле в подъемнике-загрузчике 100, то есть в компоненте гидравлической системы 401 или в цилиндре 222A подъемного устройства 220 сварного узла мачты или цилиндре 412 подъемного устройства 400 узла каретки вил. Преобразователь TD отправляет сигнал регулятору 1500, который представляет измеренное давление в гидравлическом узле.
предельное давление TP может содержать переменную, которая зависит от одного или нескольких параметров, например, высоты части подъемника-загрузчика 10, например, максимальной высоты подъема подвижного узла, например, максимальной высоты верхних частей вил 402, 404 относительно земли или максимальной высоты верхнего элемента сварного узла 250 третьей секции относительно земли и веса груза 250A, который находится на вилах 402, 404. В соответствии с одним наглядным аспектом изобретения эти значения, то есть высота подъемника-загрузчика и вес груза, который находится на вилах 402, 404, могут использоваться для определения граничного давления TP в соответствии с нижеследующим уравнением:
TP (фунты на квадратный дюйм) = [A (фунты на квадратный дюйм/фунт) * груз (фунты)] / 100 (безразмерная величина) + [(высота (дюймы) * 100 (безразмерная величина)] / B (дюймы/фунты на квадратный дюйм)
где TP - это предельное давление (фунтов на квадратный дюйм), A - система с регулируемым коэффициентом усиления, определяемым числовой постоянной, равняющейся 10 (фунтов на квадратный дюйм/фунт) в изображенном варианте осуществления, груз - вес груза, перемещаемого на вилах 402, 404 (фунты), 100 - коэффициент масштабирования безразмерны, высота - максимальная высота подъема подвижного узла (дюймы), 100 - коэффициент масштабирования безразмерный и B - смещение системы, определяемое числовой постоянной, равняющейся 600 (дюймы/фунты на квадратный дюйм) в изображенном варианте осуществления.
В соответствии с одним аспектом изобретения сравнение контролируемого давления рабочей жидкости в гидравлическом узле с предельным давлением TP можно провести при помощи регулятора 1500, например, когда подъемник-загрузчик 10 выполняет команду на опускание или команду на подъем один раз в течение каждого заранее установленного периода времени, например, каждые 5 миллисекунд. Если контролируемое давление рабочей жидкости в гидравлическом узле опускается ниже предельного давления TP, это может служить показателем того, что гидравлический узел потерял способность удерживать груз, например, в результате разрыва трубопроводов для жидкости 411A-411C. Если контролируемое давление рабочей жидкости в гидравлическом узле опускается ниже предельного давления, регулятор 1500 выполняет ответную процедуру прекращения подачи энергии к первому и второму электронным нормально закрытым пропорциональным электромагнитным клапанам 430 и 440 с целью предупреждения дальнейшего опускания поршней 222B и 414. Регулятор 1500 может перевести первый и второй клапаны 430 и 440 из механизированных открытых положений в закрытые положения сразу же или по истечении дополнительного периода времени, например, примерно от 0,3 секунды примерно до 1,0 секунды. При закрытии первого и второго клапанов 430 и 440 по истечении дополнительного периода времени, величина пиков давления в цилиндрах 222A и 412, которые возникают, когда поршни 222B и 414 прекращают опускаться в цилиндрах 222A и 412, уменьшается. Более того, закрытие первого и второго клапанов 430 и 440 регулятором 1500 может содержать частичное закрытие первого и второго клапанов 430 и 440, то есть неполного закрытия первого и второго клапанов 430 и 440 для обеспечения медленного опускания на землю узла 300 каретки вил и сварных узлов 240, 250 второй и третьей секций.
В одном варианте осуществления изобретения во избежание ошибочных перемещений при сравнении контролируемого давления с предельным давлением TP, ответная процедура выполняется исключительно электронным регулятором 1500, если определяется, что узел 300 каретки вил перемещается со скоростью, превышающей заранее установленную скорость относительно сварного узла 230 первой секции, где скорость узла 300 каретки вил относительно сварного узла первой секции можно определить, как подробно описано в данном документе. Заранее установленная скорость может превышать или равняться примерно 90 футов/минуту.
Следует отметить, что сравнение контролируемого давления рабочей жидкости в гидравлическом узле с предельным давлением TP можно выполнить при помощи регулятора 1500 для проведения ответной процедуры в дополнение к одному или нескольким другим сравнениям, описанным в данном документе, или вместо них, например, сравнение определенной или измеренной скорости узла 300 каретки вил относительно сварного узла 230 первой секции с первой и/или второй граничными скоростями и/или сравнение контролируемой величиной электрического тока к двигателю 301 механизма подъема или от него с заранее установленным предельным (текущим) значением.
Более того, ответные процедуры альтернативные ответным процедурам ранее описанным в данном документе могут осуществляться регулятором 1500, если событие сравнения, например, сравнение определенной или измеренной скорости узла 300 каретки вил относительно сварного узла 230 первой секции с первой и/или второй предельными скоростями сравнение контролируемой величины электрического тока к двигателю 301 механизма подъема или от него с заранее установленным предельным (текущим) значением, и/или сравнение контролируемого давления рабочей жидкости в гидравлическом узле с предельным давлением TP, дает результат, который требует проведение процедуры. Например, регулятор 1500 может сначала выполнить пошаговое снижение величины электрического тока к первому и второму электронным нормально закрытым пропорциональным электромагнитным клапанам 430 и 440 до уровня, находящегося на или незначительно превышающего предельно низкую величину тока. Предельно низкая величина тока составляет 250 миллиампер в одном варианте осуществления изобретения и является минимальным током, который оказывает влияние на гидравлическую жидкость через клапан. Регулятор 1500 может затем увеличивать величину тока к первому и второму электронным нормально закрытым пропорциональным электромагнитным клапанам 430 и 440 скачками до уровня ниже максимальной заданной величины тока. Максимальная заданная величина тока составляет 600 миллиампер в одном варианте осуществления изобретения и является током, который полностью открывает клапаны 430 и 440. регулятор 1500 может затем быстро линейно уменьшить подачу тока к первому и второму электронным нормально закрытым пропорциональным электромагнитным клапанам 430 и 440 до предельно низкой величины тока по истечении периода времени, составляющего, например, примерно 400 миллисекунд. При закрытии первого и второго клапанов 430 и 440 по прошествии дополнительного периода времени, величина пиков давления в цилиндрах 222A и 412, которые возникают при внезапном закрытии первого и второго клапанов 430 и 440, уменьшается. Кроме того, управление таким способом первым и вторым клапанами 430 и 440, например, внезапное неполное закрытие первого и второго клапанов 430 и 440, улучшает время реакции и сокращает колебания в узле 300 каретки вил, которые в иных случаях могут возникнуть в результате срабатывания предохранителя потока, обеспечивая медленное опускание на землю узла 300 каретки вил и сварных узлов 240, 250 второй и третьей секций управляемым способом.
В соответствии со вторым вариантом осуществления настоящего изобретения предлагается погрузочно-разгрузочное транспортное средство, содержащее, например, вертикальный грузоподъемник с противовесом или похожее транспортное средство, включающее приводной узел (не показан), узел 1000 мачты, подъемное устройство 1100 сварного узла мачты, узел каретки вил (не показан) и подъемное устройство 1200 узла каретки вил, см. фиг.12. Узел 1100 мачты содержит, в представленном варианте осуществления, первый, второй и третий сварные узлы мачты 1002, 1004 и 1006, см. фиг.12, где второй сварной узел 1004 вставляется в первый сварной узел 1002 и третий сварной узел 1006 вставляется во второй сварной узел 1004. Первый сварной узел 1002 фиксируется к приводному узлу транспортного средства. Второй или промежуточный сварной узел 1004 способен вертикально перемещаться относительно первого сварного узла 1002. Третий или внутренний сварной узел 1006 может вертикально перемещаться относительно первого и второго сварных узлов 1002 и 1004.
Подъемное устройство 1100 сварного узла мачты содержит первый и второй подъемные поршни/цилиндры в сборе 1102 и 1104, которые фиксируются в своих цилиндрах 1102B и 1104B к первому сварному узлу 1002, см. фиг.12. Поршни 1102A и 1104A, выдвигающиеся из цилиндров 1102B и 1104B, фиксируются к верхнему подкосу 1004A второго сварного узла 1004.
Первая цепь 1211 крепится к цилиндру 1102B первого узла 1102 плунжерного цилиндра и вторая цепь 1213 крепится к цилиндру 1104B второго узла 1104 плунжерного цилиндра. Первая цепь 1211 проходит по первому шкиву 1004B, соединенному с верхним концом второго сварного узла 1004 мачты и соединяется с нижней частью 1006А третьего сварного узла 1006, см. фиг.12. Вторая цепь 1213 проходит по второму шкиву 1004C, соединенному с верхним концом второго сварного узла 1004 мачты и также соединяется с нижней частью третьего сварного узла 1006A. Когда поршни 1102A и 1104A узлов 1102 и 1104 выдвигаются, поршни 1102A и 1104A поднимают второй сварной узел 1004 вертикально относительно неподвижного первого сварного узла 1002. Кроме того, первый и второй шкивы 1004B и 1004C, прикрепленные к верхнему концу второго сварного узла 1004, прикладывают направленную вверх силу к цепям 1211 и 1213, приводя к вертикальному перемещению третьего сварного узла 1006 относительно первого и второго сварных узлов 1002 и 1004. Для каждого вертикального перемещения второго сварного узла 1004, третий сварной узел 1006 перемещается вертикально на две единицы.
Узел каретки вил содержит пару вил (не показаны) и механизм каретки вил, на который устанавливаются вилы. Механизм каретки вил может устанавливаться для возвратно-поступательного движения непосредственно к третьему сварному узлу 1006 мачты. В качестве альтернативного варианта механизм каретки вил может устанавливаться на механизм выдвижения (вил) (не показан), который устанавливается на узел основной каретки (не показан), которая устанавливается для возвратно-поступательного движения к третьему сварному узлу 1006 мачты.
Подъемное устройство узла 1200 каретки вил соединяется с третьим сварным узлом 1006 и узлом каретки вил для осуществления вертикального перемещения узла каретки вил относительно третьего сварного узла 1006. Подъемное устройство 1200 включает в себя узел плунжерного цилиндра 1210, содержащий цилиндр 1212, прикрепленный к третьему сварному узлу 1006 мачты для того, чтобы он перемещался вертикально с третьим сварным узлом 1006. Поршень 1211, см. фиг.13, связан с цилиндром 1212 и может выдвигаться из цилиндра 1212 при заполнении цилиндра 1212 рабочей жидкостью под давлением. Третий и четвертый шкивы 1216 и 1218 соединяются с верхним концом поршня 1211, см. фиг.12. Пара подъемных цепей (не показаны) крепятся с одного конца к цилиндру 1212, проходит по третьему шкиву 1216 и соединяется с нижней частью (не показана) узла каретки вил. При заполнении цилиндра 1212 жидкостью под давлением, поршень 1211 выдвигается, приводя к вертикальному движению шкива 1216 относительно третьего сварного узла 1006. Вертикальное движение шкива 1216 приводит к тому, что подъемные цепи поднимают узел каретки вил относительно третьего сварного узла 1006.
Погрузочно-разгрузочное транспортное средство по второму варианту осуществления включает в себя гидравлическую систему 1300, изображенную на фиг.13, на которой элементы идентичные элементам, изображенным на фиг.9, имеют одинаковые ссылочные позиции. Гидравлическая система 1300 содержит двигатель 301 механизма подъема, который приводит в движение гидравлический насос 302 рабочей жидкости гидросистемы. Насос 302 подает рабочую жидкость под давлением к подъемному устройству 1100 сварного узла мачты, содержащей первый и второй подъемные узлы 1102 и 1104 плунжерного цилиндра и к подъемного устройства 1200 узла каретки вил, содержащей узел 1210 плунжерного цилиндра.
Гидравлическая система 1300 дополнительно содержит бак для рабочей жидкости 402, который размещается в приводном узле, и шланги/трубопроводы для жидкости 411A-411D, соединенные между насосом 302 и подъемным устройством 1100 сварного узла мачты, содержащей первый и второй подъемные узлы 1102 и 1104 плунжерного цилиндра, и подъемным устройством 1200 узла каретки вил, содержащего узел 1210 плунжерного цилиндра. Шланги/трубопроводы для жидкости 411A и 411B соединяются последовательно и используются в качестве трубопроводов подачи/возврата между насосом 302 и первым гидравлическим узлом 1102 плунжерного цилиндра сварного узла мачты. Шланги/трубопроводы для жидкости 411A и 411C соединяются последовательно и используются в качестве трубопроводов подачи/возврата между насосом 302 и гидравлическим узлом 1210 плунжерного цилиндра подъемного устройства узла каретки вил. Шланги/трубопроводы для жидкости 411A и 411D соединяются последовательно и используются в качестве трубопроводов подачи/возврата между насосом 302 и вторым гидравлическим узлом 1104 плунжерного цилиндра сварного узла мачты. Поскольку шланг/трубопровод для жидкости 411A непосредственно соединяется со шлангами/трубопроводами для жидкости 411B-411D, все четыре трубопровода 411A-411C постоянно находятся по существу под одинаковым давлением жидкости.
Гидравлическая система 401 также содержит электронный нормально закрытый двухпозиционный электромагнитный клапан 420 и первый, второй и третий электронные нормально закрытые пропорциональные электромагнитные клапаны 1430, 1435 и 1440. Клапаны 1420, 1430, 1435 и 440 соединяются с электронным регулятором 1500 для управления их работой, см. фиг.13. Электронное регулятор 1500 является частью «устройства управления». К нормально закрытому двухпозиционному электромагнитному клапану 420 подается энергия регулятором 1500 только при опускании одного или нескольких поршней 1211, 1102A и 1104A. При прекращении подачи энергии электромагнитный клапан 420 используется в качестве обратного клапана для блокирования вытекания жидкости под давлением из трубопровода 411A через насос 302 и обратно в бак 402, то есть используется для предупреждения смещения вниз узла каретки вил и обеспечивает поток жидкости под давлением к цилиндрам 1212, 1102B и 1104B через трубопроводы 411A-411D во время подъема.
Первый электронный нормально закрытый пропорциональный электромагнитный клапан 1430 располагается внутри и непосредственно соединяется с основанием 1102C цилиндра 1102B первого гидравлического узла 1102 плунжерного цилиндра подъемного устройства сварного узла мачты, см. фиг.13. Второй электронный нормально закрытый пропорциональный электромагнитный клапан 1435 располагается внутри и непосредственно соединяется с основанием 1104C цилиндра 1104B второго гидравлического узла 1104 плунжерного цилиндра подъемного устройства сварного узла мачты. Третий электронный нормально закрытый пропорциональный электромагнитный клапан 1440 располагается внутри и непосредственно соединяется с основанием 1212A цилиндра 1212 гидравлического узла 1200 плунжерного цилиндра подъемного устройства узла каретки вил. К первому и второму нормально закрытым пропорциональным электромагнитным клапанам 1430 и 1435 подается энергия, то есть в открытом состоянии, регулятором 1500, когда поршни 1102A и 1104A необходимо опустить. К третьему нормально закрытому пропорциональному электромагнитному клапану 1440 подается энергия, то есть в открытом состоянии, регулятором 1500, когда поршень 1211 необходимо опустить. При прекращении подачи энергии первый, второй и третий нормально закрытые пропорциональные электромагнитные клапаны 1430, 1435 и 1440 используются в качестве обратных клапанов для блокирования вытекания жидкости под давлением из цилиндров 1102B, 1104B и 1212. Клапаны 1430, 1435 и 1440 при использовании в качестве обратных клапанов также обеспечивают поток рабочей жидкости под давлением в цилиндры 1102B, 1104B и 1212 во время подъема.
При подаче оператором команды на подъем через многофункциональный блок управления, цилиндр 1212 подъемного устройства 1200 узла каретки вил и цилиндры 1102B и 1104B подъемного устройства 1100 сварного узла мачты подвергаются воздействию рабочей жидкости с одинаковым давлением через трубопроводы 411A-411D. Поршень 1211 подъемного устройства 1200 узла каретки вил имеет основание с площадью поперечного сечения и все поршни 1102A и 1104A подъемного устройства 1100 сварного узла мачты включают в себя основание, имеющее площадь поперечного сечения равную примерно ½ площади поперечного сечения поршня 1211 подъемного устройства 1200 узла каретки вил. Следовательно, суммарная площадь поперечных сечений поршней 1102A и 1104А равняются площади поперечного сечения поршня 1211. В результате для всех режимов нагрузки для приведения подъемного устройства 1200 узла каретки вил в действие требуется более низкое давление, чем для подъемного устройства 1100 сварного узла мачты. В результате поршень 1211 подъемного устройства 1200 узла каретки вил будет перемещаться первым до тех пор, пока устройство каретки вил не достигнет своей максимальной высоты относительно сварного узла 1006 третьей секции. После этого сварные узлы 1004 и 1006 вторая и третья секции начнут двигаться вертикально относительно сварного узла 1002 первой секции.
При подаче оператором команды на опускание через многофункциональный блок управления 130, электронное регулятор 1500 приводит к открытию электронного нормально закрытого двухпозиционного электромагнитного клапана 420. Предположим, что поршни 1211, 1102A и 1104A полностью выдвигаются при подаче команды на опускание, к первому и второму пропорциональным клапанам 1430 и 1435 подается энергия регулятором 1500, приводя к их полному открытию в изображенном варианте осуществления для выпуска жидкости из цилиндров 1102B и 1104B подъемного устройства 1100 сварного узла мачты, обеспечивая тем самым опускание сварных узлов 1004 и 1006 второй и третьей секций. Когда сварные узлы 1004 и 1006 второй и третей секций находятся в своих крайних нижних положениях, регулятор 1500 приводит по существу к полному открытию третьего пропорционального клапана 1440 и к частичному закрытию первого и второго пропорциональных клапанов 1430 и 1435. Частичное закрытие первого и второго клапанов 1430 и 1435 приводит к понижению давления жидкости в трубопроводах 411A-411D. При открытии третьего клапана 1440 и частичном закрытии первого и второго клапанов 1430 и 1435, поршень 1211 начинает опускаться, а поршни 1102A и 1104A продолжают опускаться. После того, как поршни 1102A и 1104A достигают своих крайних нижних положений, поршень 1211 продолжает опускаться до тех пор, пока узел каретки вил не достигнет своего крайнего нижнего положения.
Предлагаются первый и второй блоки 600 и 602 датчиков положения, соответственно, также являющиеся частью «устройства управления», и могут содержать стандартные узлы датчиков положения с фрикционными колесами или стандартные проводные/кабельные узлы датчиков положения, см. фиг.13. В изображенном варианте осуществления первый блок 600 датчика положения содержит первый узел датчика положения с фрикционным колесом, установленный на сварном узле 1006 третьей секции таким образом, чтобы первое фрикционное колесо сцеплялось и перемещалось по сварному узлу 1004 второй секции. Следовательно, по мере перемещения сварного узла 1006 третьей секции относительно сварного узла 1004 второй секции, первый датчик положения с фрикционным колесом генерирует импульсы для регулятора 1500, указывающие на перемещение сварного узла третьей секции относительно сварного узла второй секции.
Также в изображенном варианте осуществления второй блок 602 датчика положения содержит второй узел датчика положения с фрикционным колесом, установленный на узле каретки вил таким образом, чтобы второе фрикционное колесо сцеплялось и перемещалось по сварному узлу 1006 третьей секции мачты. Следовательно, по мере перемещения узла каретки вил относительно сварного узла 1006 третьей секции, второй узел датчика положения с фрикционным колесом генерирует импульсы для регулятора 1500, указывающие на перемещение узла каретки вил относительно сварного узла 1006 третьей секции.
Как отмечалось выше, первый и второй блоки 600 и 602 датчиков положения генерируют соответствующие импульсы для регулятора 1500. Импульсы, генерируемые первым блоком 600 датчика положения используются регулятором 1500 для определения положения сварного узла 1006 третьей секции относительно сварного узла 1004 второй секции, а также скорости перемещения сварного узла 1006 третьей секции относительно сварного узла 1004 второй секции. При использовании данной информации регулятор 1500 определяет скорость и положение сварного узла 1006 третьей секции относительно неподвижного сварного узла 1002 первой секции. Импульсы, генерируемые вторым блоком 602 датчика положения, используются регулятором 1500 для определения положения узла каретки вил относительно сварного узла 1006 третьей секции мачты, а также скорости перемещения узла каретки вил относительно сварного узла 1006 третьей секции мачты. Зная скорость и положение сварного узла 1006 третьей секции относительно сварного узла 1002 первой секции, а также скорость и положение узла каретки вил относительно сварного узла 1006 третьей секции, регулятор 1500 может легко определить скорость и положение узла каретки вил относительно сварного узла 1002 первой секции.
В соответствии с настоящим изобретением во время выполнения команды на опускание регулятор 1500 сравнивает определенную или измеренную скорость узла каретки вил относительно сварного узла 230 первой секции с первой и второй граничными скоростями. Для этого используется регулятор 1500, определяющий первую скорость, содержащую определенную или измеренную скорость сварного узла 1006 третьей секции относительно сварного узла 1002 первой секции, определяющий вторую скорость, содержащую определенную или измеренную скорость узла каретки вил относительно сварного узла 1006 третьей секции, а также суммирование первой и второй определенных скоростей для расчета третьей определенной скорости. Третья определенная скорость равняется определенной или измеренной скорости узла каретки вил относительно сварного узла 1002 первой секции.
Как отмечалось выше, для каждого вертикального перемещения сварного узла 1004 второй секции на одну единицу относительно сварного узла 1002 первой секции, сварной узел 1006 третьей секция перемещается вертикально на две единицы относительно сварного узла 1002 первой секции. Для того чтобы определить первую скорость, регулятор 1500 определяет скорость сварного узла 1006 третьей секции относительно сварного узла 1004 второй секции, используя импульсы от первого блока 600 датчика положения, как отмечалось выше, и умножает определенную скорость перемещения сварного узла 1006 третьей секции относительно сварного узла 1004 второй секции на «2». Следовательно, данный способ предоставляет первую скорость, то есть скорость сварного узла 1006 третьей секции относительно сварного узла 1002 первой секции.
Вторая скорость равняется определенной скорости перемещения узла каретки вил относительно сварного узла третьей секции мачты с использованием импульсов, генерируемых вторым блоком 602 датчика положения, как отмечалось выше.
Во время выполнения команды на опускание регулятор 15000 может сравнивать третью определенную скорость, то есть определенную скорость узла каретки вил относительно сварного узла 1002 первой секции, с первой и второй граничными скоростями. В иллюстрируемом варианте осуществления сравнение третьей определенной скорости с первой и второй граничными скоростями может осуществляться регулятором 1500 один раз в течение каждого заранее установленного периода времени, например, каждые 5 миллисекунд. Сравнение третьей определенной скорости с первой и второй граничными скоростями называется в данном документе «событием сравнения». Если третья определенная скорость превышает первую предельную скорость во время выполнения заранее установленного количества последовательных событий сравнения, например, от 1 до 50 событий сравнения, или превышает вторую предельную скорость во время выполнения одного события сравнения, в таком случае регулятор 1500 выполняет ответную процедуру, в которой регулятор прекращает подачу энергии к первому, второму и третьему электронным нормально закрытым пропорциональным электромагнитным клапанам 1430, 1435 и 1440 с целью предупреждения дальнейшего опускания поршней 1102A, 1104A и 1211. регулятор 1500 может перевести первый, второй и третий клапаны 1430, 1435 и 1440 из механизированных открытых положений в закрытые положения незамедлительно или по истечении дополнительного периода времени, например, примерно от 0,3 секунды примерно до 1,0 секунды. Более того, как обсуждалось выше, клапаны 1430, 1435 и 1440 можно только частично закрыть для обеспечения медленного опускания на землю узла каретки вил, а также сварных узлов 1004, 1006 второй и третьей секций. Предполагается, когда третья определенная скорость превышает определенную скорость первой и второй предельных скоростей, узел каретки вил перемещается слишком быстро относительно сварного узла 1002 первой секции, то есть с непредусмотренной скоростью опускания, такое условие может возникнуть при снижении гидравлического давления в жидкости, которая дозируется из одного или нескольких цилиндров 1102B, 1104B и 1212. Снижение гидравлического давления может быть вызвано разрывом одного из трубопроводов для жидкости 411A-411D.
Первую предельную скорость можно определить при помощи электронного регулятора 1500, как изложено ниже. Во-первых, регулятор 1500 может рассчитывать суммарную скорость поршней 1102A, 1104A подъемного устройства 1100 сварного узла мачты и поршня 1211 подъемного устройства 1200 узла каретки вил на основании скорости двигателя 301 механизма подъема. Как обсуждалось выше в отношении опускания при использовании узла каретки вил и полностью выдвинутых второй и третьей сварных секций 1004 и 1006, поршни 1102A и 1104A начинают опускаться первыми, затем поршни 1102A, 1104A и 1211 опускаются одновременно во время опускания секций до тех пор, пока поршни 1102A и 1104A не достигнут своих крайних нижних положений. Затем поршень 1211 продолжает опускаться до тех пор, пока он не достигнет своего крайнего нижнего положения.
Во-первых, регулятор 1500 пересчитывает скорость двигателя механизма подъема в скорость потока жидкости насоса механизма подъема при использовании нижеследующего уравнения:
скорость потока жидкости насоса (галлоны/минута) = [(скорость двигателя механизма подъема (число оборотов в минуту)) * (производительность насоса механизма подъема (куб. см/оборот)) * (объемный коэффициент полезного действия двигателя механизма подъема)] / (3786 куб. см/гал).
Регулятор 1500 может определить расчетную линейную скорость узла каретки вил относительно сварного узла 1002 первой секции при использовании нижеследующего уравнения, предполагается, что данное уравнение применимо ко всем фазам опускания, включая опускание секций, когда поршни 1102A и 1104A, а также поршень 1211 опускаются одновременно:
расчетная линейная скорость узла каретки вил относительно первого сварного узла 1002 (дюймы/секунда) = [(скорость потока жидкости насоса (галлоны/минута)) * (231 дм3/галлон) * (отношений скоростей)] / [(внутренняя площадь цилиндра (дм2)) * (60 секунд/минута)]
где,
«внутренняя площадь цилиндра» = суммирование площадей поперечного сечения цилиндров 1102B и 1104B = площадь поперечного сечения цилиндра 1212 (в уравнении используется только суммирование площадей поперечного сечения цилиндров 1102B и 1104B или только площадь поперечного сечения цилиндра 1212);
«отношение скоростей» = (скорость третьего сварного узла/скорость первого сварного узла) = (скорость узла каретки вил/скорость третьего сварного узла) = 2/1 в изображенном варианте осуществления.
В приведенном варианте осуществления первая предельная скорость равняется расчетной скорости узла каретки вил относительно первого сварного узла 1002, умноженной на первый толерантный множитель, например, 1,6 или второй толерантный множитель, например, 1, 2. Как отмечалось выше в отношении варианта осуществления, представленного на фиг.9, первый толерантный множитель используется, когда скорость опускания вил находится в процессе линейного изменения до заданной скорости, то есть регулятор 1500 по-прежнему выполняет линейно нарастающую функцию, а второй толерантный множитель используется, когда регулятор 1500 больше не увеличивает скорость двигателя 301 механизма подъема, то есть регулятор 1500 завершило выполнение линейно нарастающей функции.
Как отмечалось выше регулятор 1500 может использовать определенную скорость опускания узла каретки вил относительно первого сварного узла, расчетную скорость опускания узла каретки вил относительно первого сварного узла и текущий объемный коэффициент полезного действия насоса для создания скорректированного объемного коэффициента полезного действия насоса, скорректированный объемный коэффициент полезного действия насоса может использоваться регулятором 1500 при последующем пересчете скорости двигателя механизма подъема в скорость потока жидкости насоса. Как отмечалось выше, регулятор 1500 может использовать начальный объемный коэффициент полезного действия насоса, то есть заранее определенный хранимый начальный объемный коэффициент полезного действия насоса или точку соответствующего объемного коэффициента полезного действия, которая соответствует одному или нескольким состояниям транспортного средства, например, скорости, давлению рабочей жидкости, температуре и/или вязкости, направлению вращения гидравлического насоса 302 рабочей жидкости гидросистемы и так далее, хранимым в таблице данных или в справочной таблице, при последующем пересчете скорости двигателя механизма подъема в скорость потока жидкости насоса.
Вторая предельная скорость может содержать фиксированную скорость, например, 300 футов/минуту.
Условие 700, показанное на фиг.10A и 10B, может использоваться регулятором 1500 для управления работой первого, второго и третьего электронных нормально закрытых пропорциональных электромагнитных клапанов 1430, 1435 и 1440 во время выполнения команды на опускание с нижеследующими модификациями, внесенными в процесс.
По условию 711 регулятор 1500 определяет, является ли «предельный отсчет» больше «максимально предельного отсчета» или является ли третья определенная скорость больше второй предельной скорости. Если ответом на один или оба запроса является "ДА", то регулятор 1500 выполняет ответную процедуру, в которой регулятор 1500 прекращает подачу энергии к первому, второму и третьему электронным нормально закрытым пропорциональным электромагнитным клапанам 1430, 1435 и 1440.
Как только клапанов 1430, 1435 и 1440 закрыты, регулятор 1500 определяет на основании импульсов, генерируемых блоками 600 и 602 датчиков положения, высоту узла каретки вил относительно сварного узла 1002 первой секции и определяет эту высоту в долговременной памяти, как первую «контрольную высоту», см. условие714. регулятор 1500 также устанавливает значение в первой ячейке блокировки памяти на "1", см. условие 716, как возникшую непредусмотренную ошибку опускания. Пока значение в первой ячейке блокировки памяти установлено на "1", регулятор 1500 не будет обеспечивать подачу энергии к клапанам 1430, 1435 и 1440 для того, чтобы они оставались открытыми для обеспечения опускания узла каретки вил. Однако регулятор 1500 будет обеспечивать, в ответ на подаваемую оператором команду на подъем, подачу жидкости под давлением в цилиндры 1102B, 1104B и 1212, которая проходит через клапаны 1430, 1435 и 1440.
В случае возникновения непредусмотренной ошибки опускания и в ответ на подаваемую оператором команду на подъем узла каретки вил, один или несколько поршней 1102A, 1104A и 1211 будут не в состоянии поднять устройство каретки вил, в таком случае значение в первой ячейке блокировки памяти останется установленным на "1". С другой стороны, если в ответ на подаваемую оператором команду на подъем узла каретки вил один или несколько поршней 1102A, 1104A и 1211 в состоянии поднять устройство каретки вил выше первой контрольной высоты с прибавлением первой исходной высоты, как указывается сигналами, генерируемыми блоками 600 и 602 датчиков положения, регулятор 1500 переустанавливает значение в первой ячейке блокировки памяти на "0", см. условия 718 и 720. Затем регулятор 1500 возвращается к условию 702 и, следовательно, будет обеспечивать подачу энергии к клапанам 1430, 1435 и 1440 для того, чтобы их можно было открыть для осуществления управляемого опускания узла каретки вил. Перемещение узла каретки вил выше первой контрольной высоты с прибавлением первой исходной высоты указывает на то, что гидравлическая система 1300 находится в рабочем состоянии.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИКЛ ПРОГРЕВА ДЛЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2596678C2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНЫМ ЭЛЕМЕНТОМ | 2014 |
|
RU2570679C1 |
| ПОДЪЕМНИК ТЕЛЕСКОПИЧЕСКИЙ | 2022 |
|
RU2785824C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД, ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНОЙ МАЧТОЙ | 2010 |
|
RU2449942C1 |
| Гидравлическая схема вилочного погрузчика с поворотным механизмом | 2022 |
|
RU2783756C1 |
| Передвижная мачта освещения телескопического типа | 2022 |
|
RU2795671C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНОЙ МАЧТОЙ | 2005 |
|
RU2281244C1 |
| Судовая аппарель | 1973 |
|
SU1207392A3 |
| САМОХОДНЫЙ ПОДЪЕМНЫЙ КРАН И СПОСОБ ОБЕСПЕЧЕНИЯ ЕГО РАБОТЫ | 2008 |
|
RU2467946C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ПЕРЕМЕЩЕНИЯ ОБЪЕКТОВ ПОВЫШЕННОЙ ДЛИНЫ | 2006 |
|
RU2405102C2 |
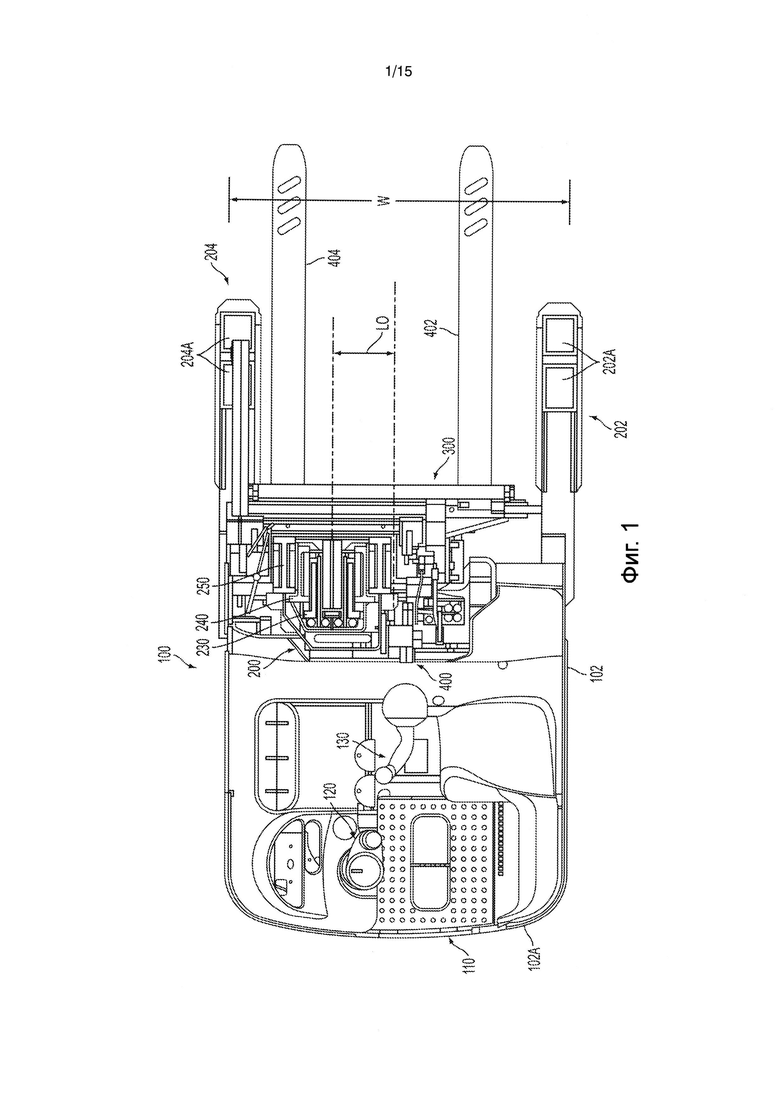
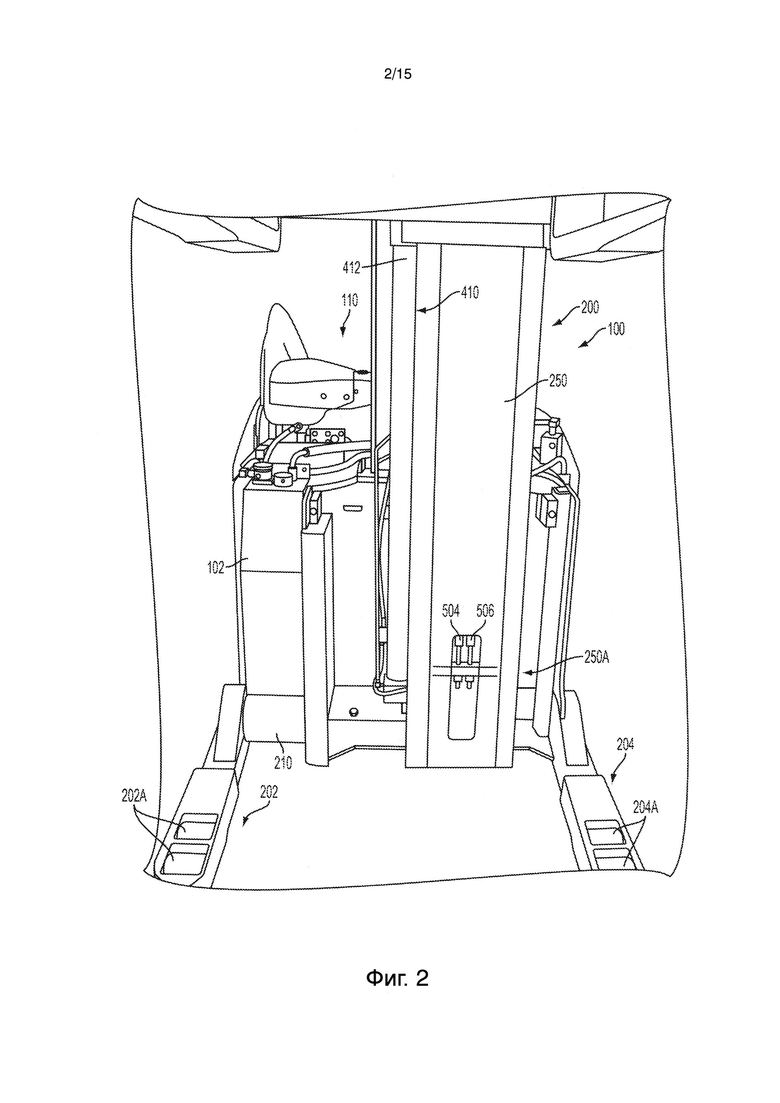
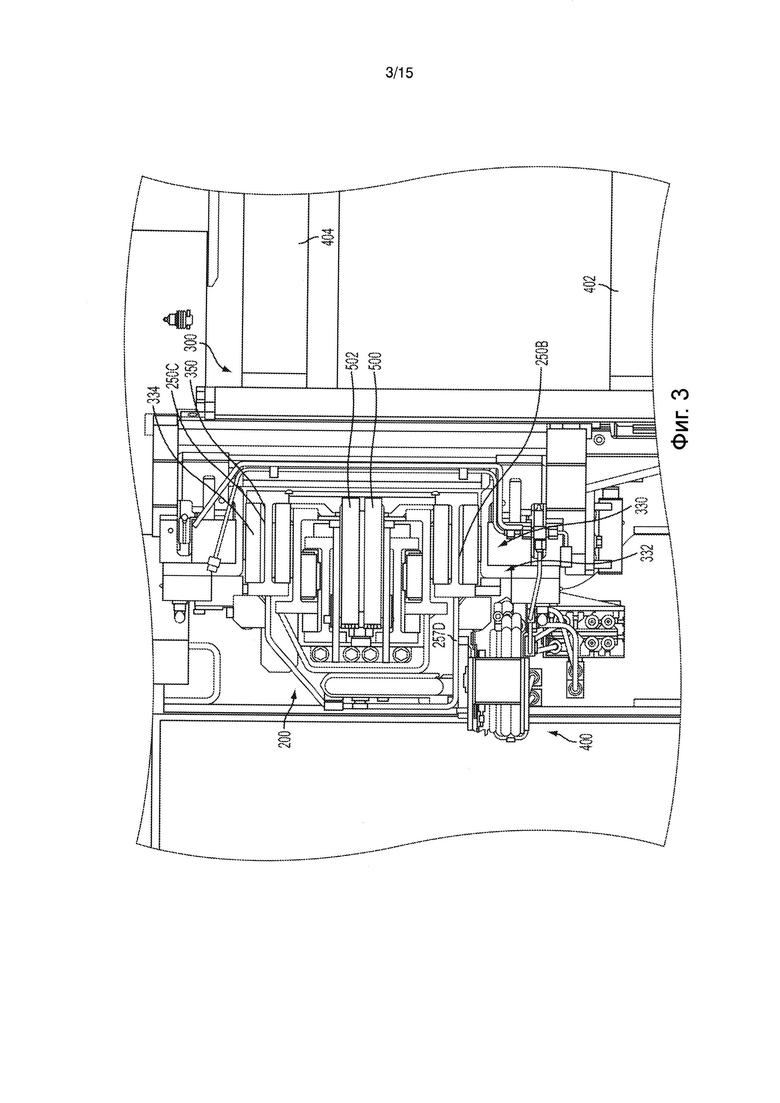
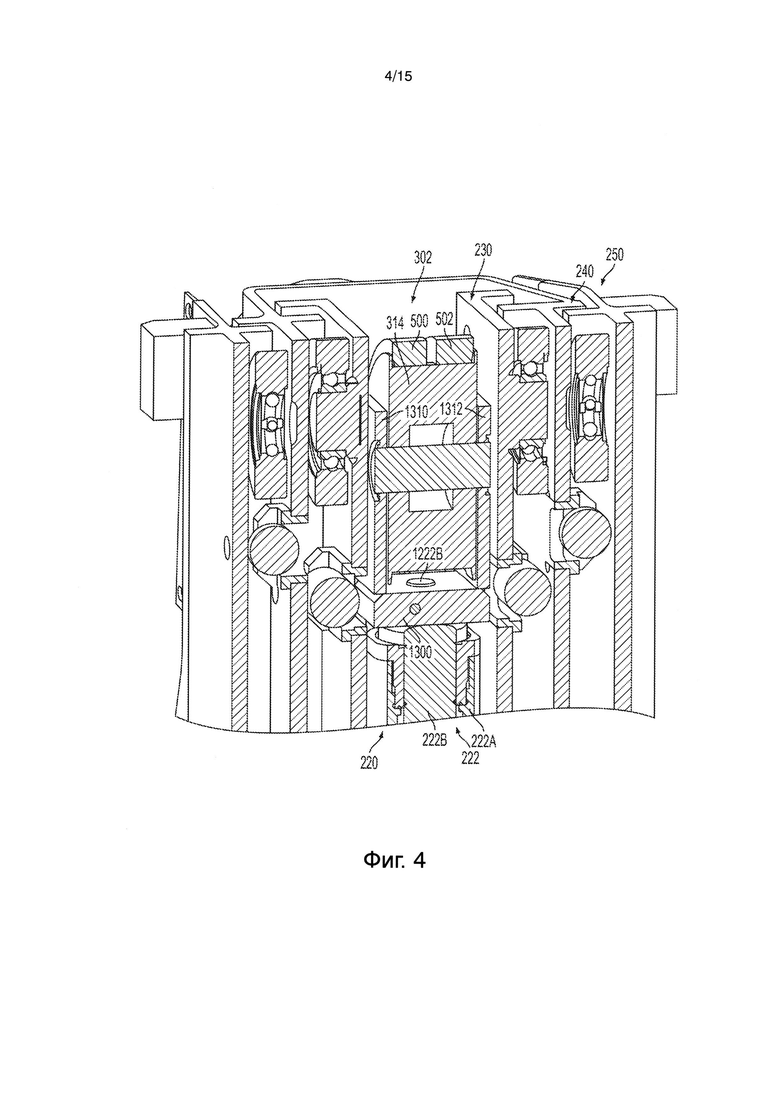
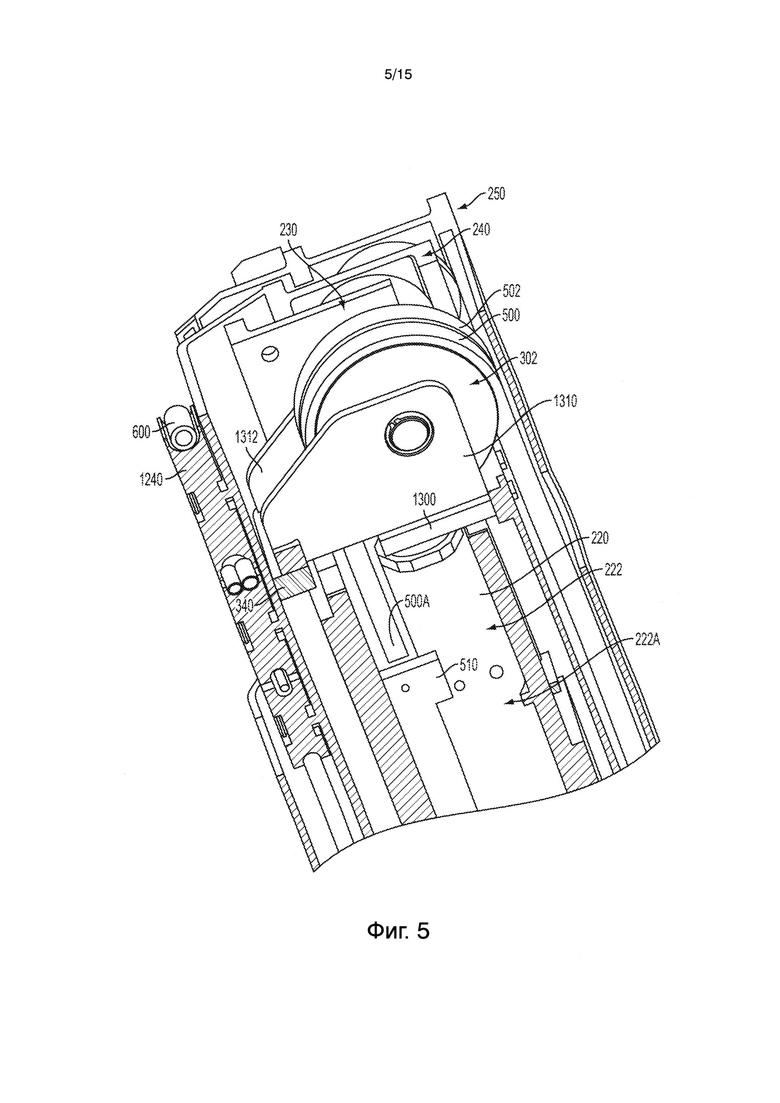
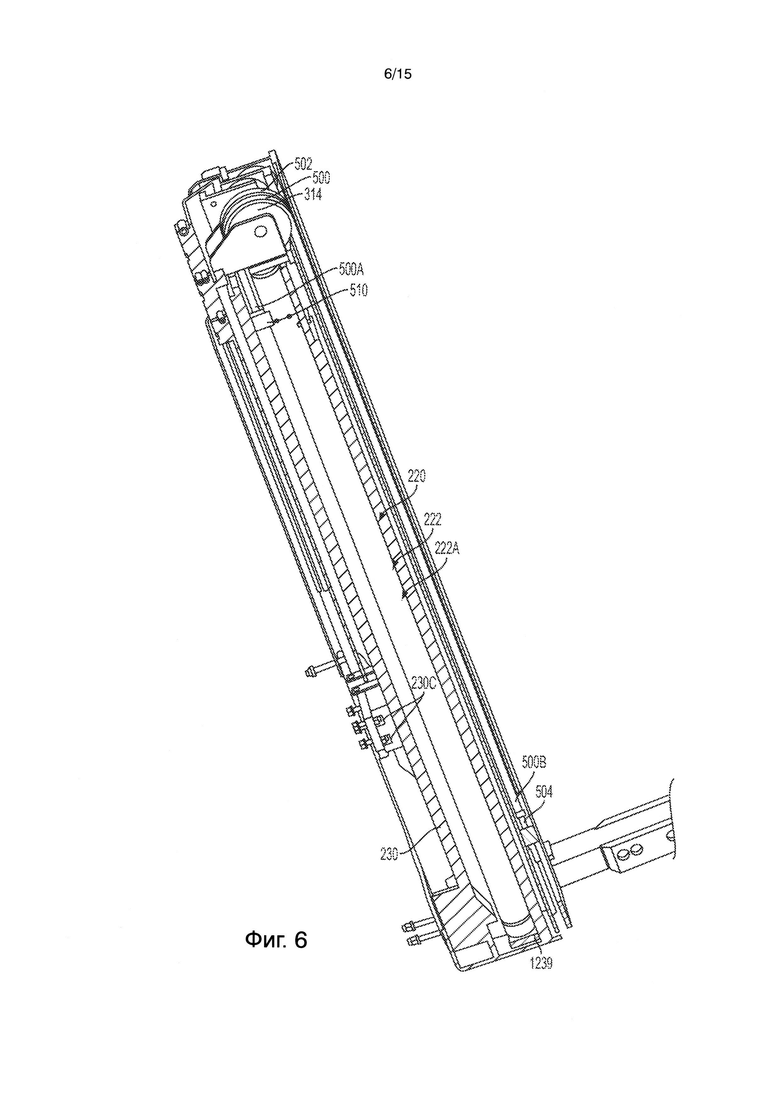
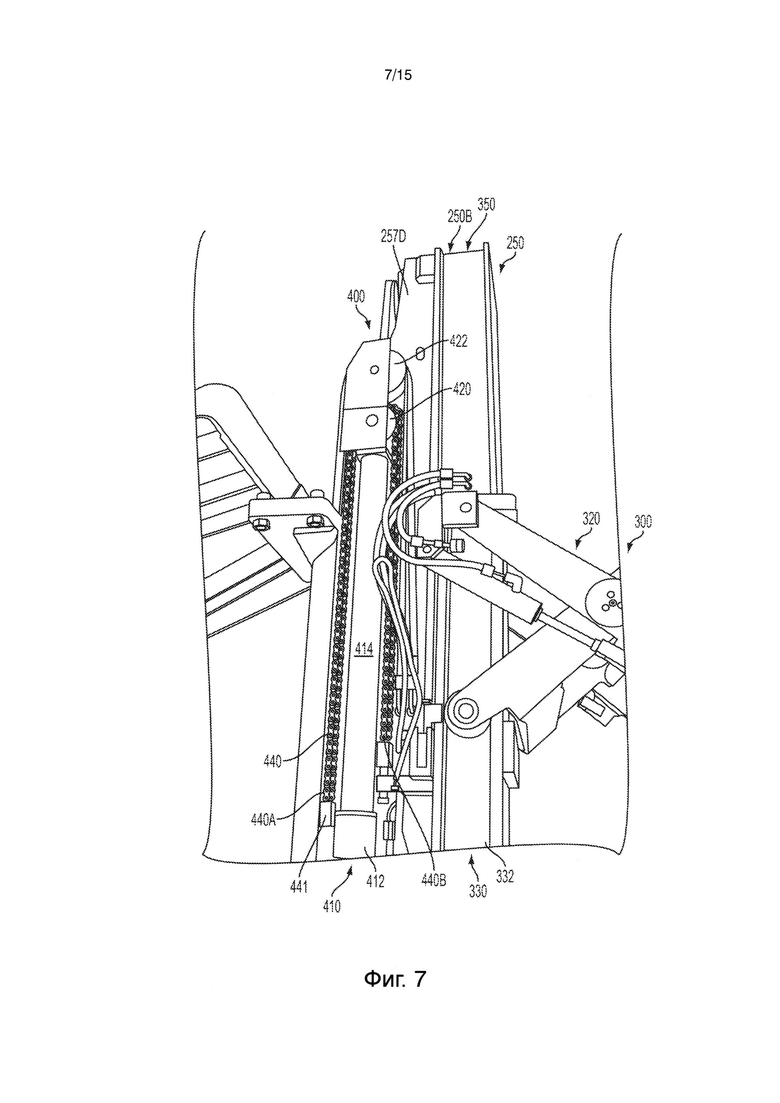
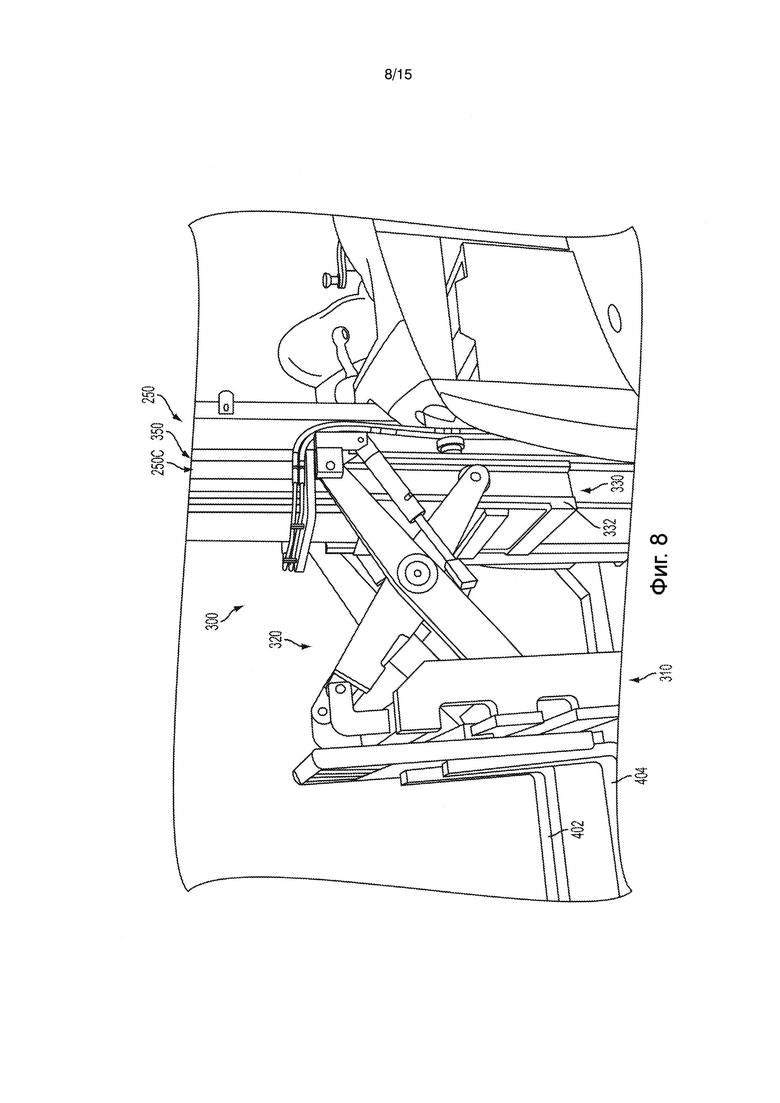
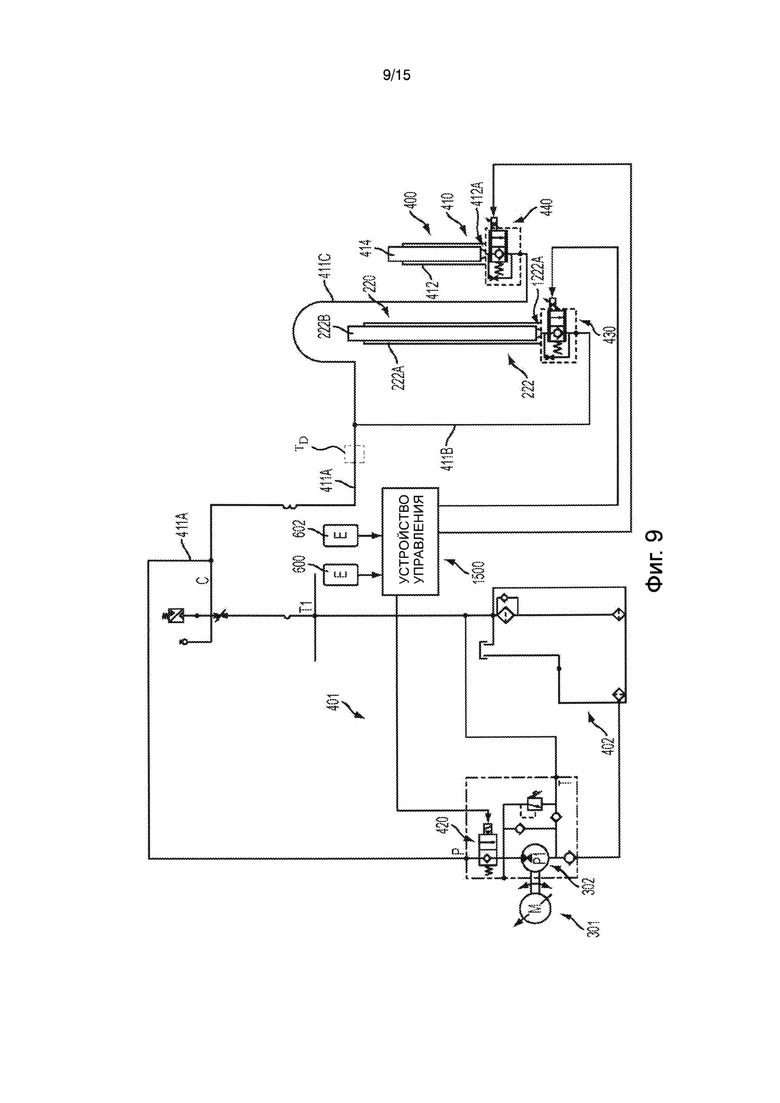
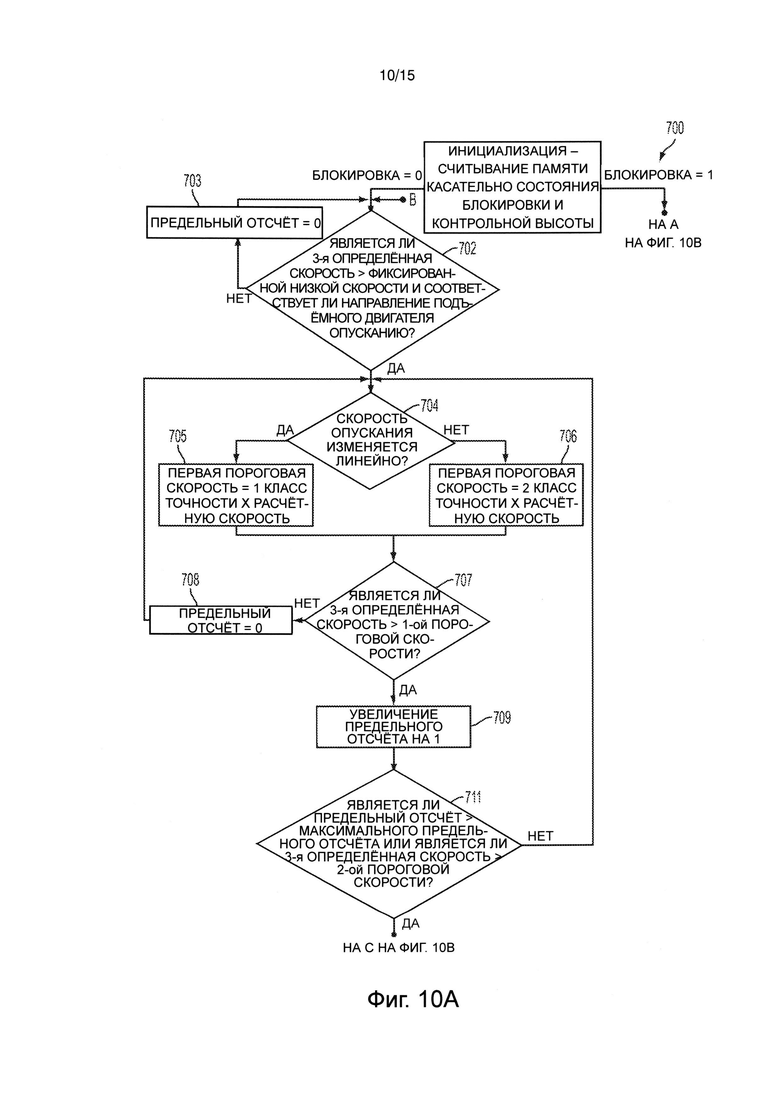
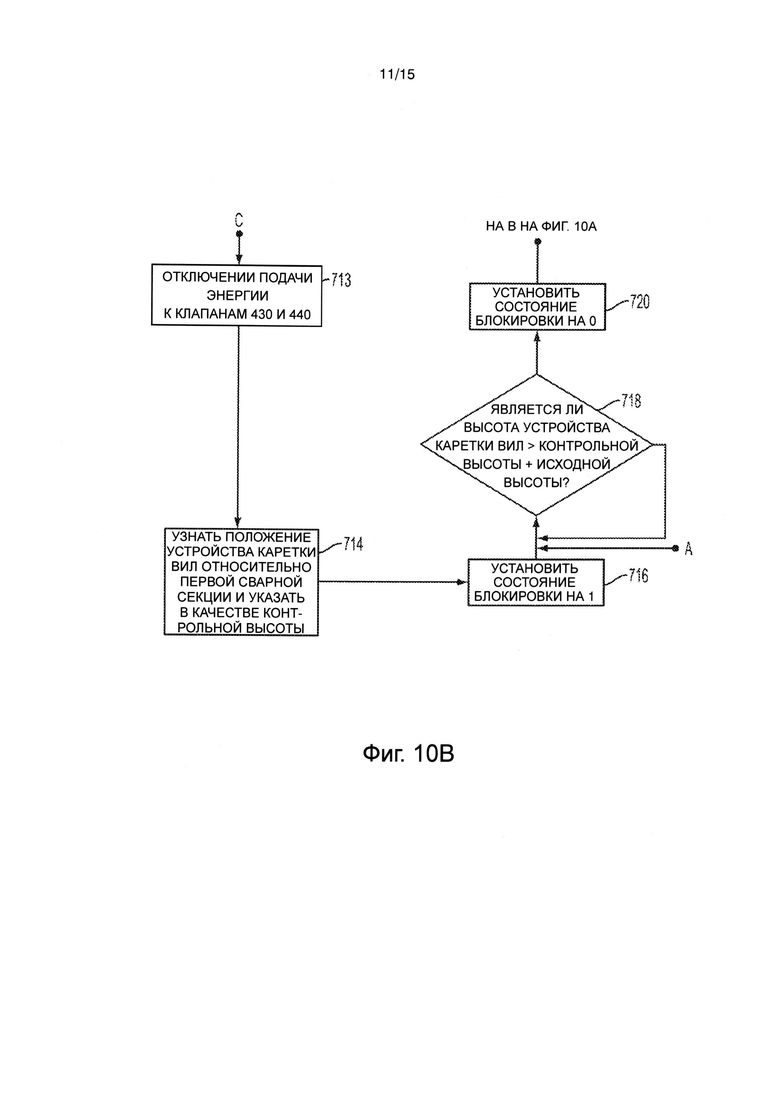
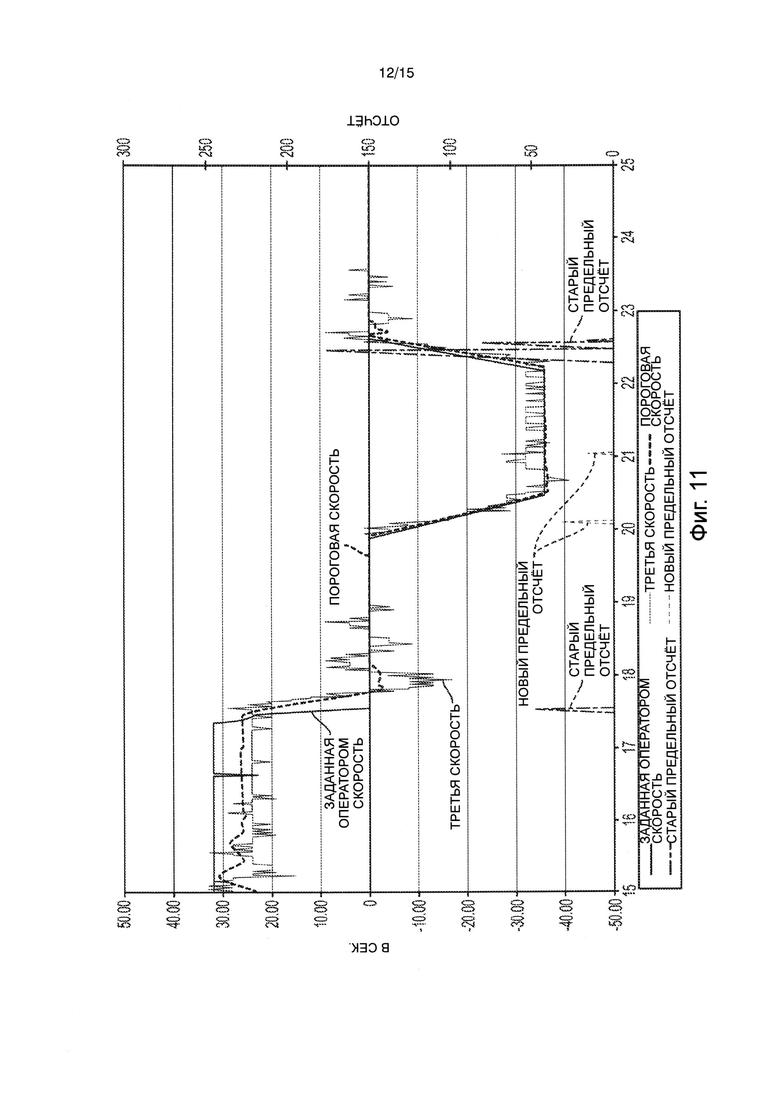
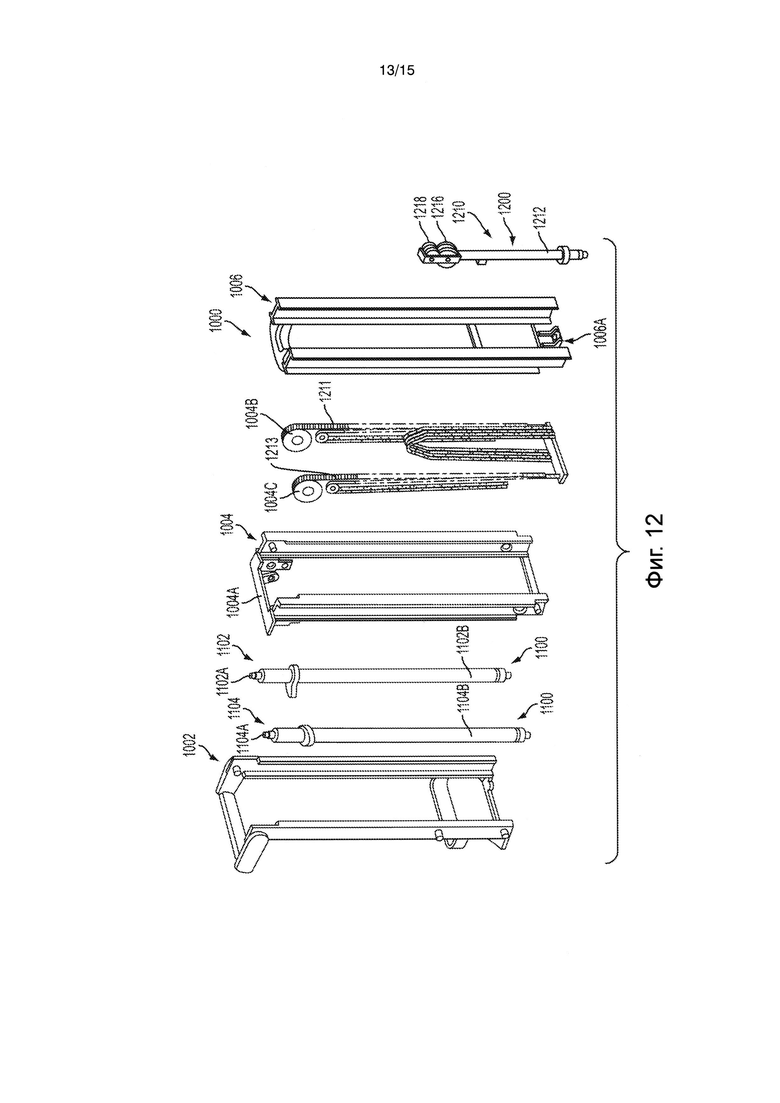
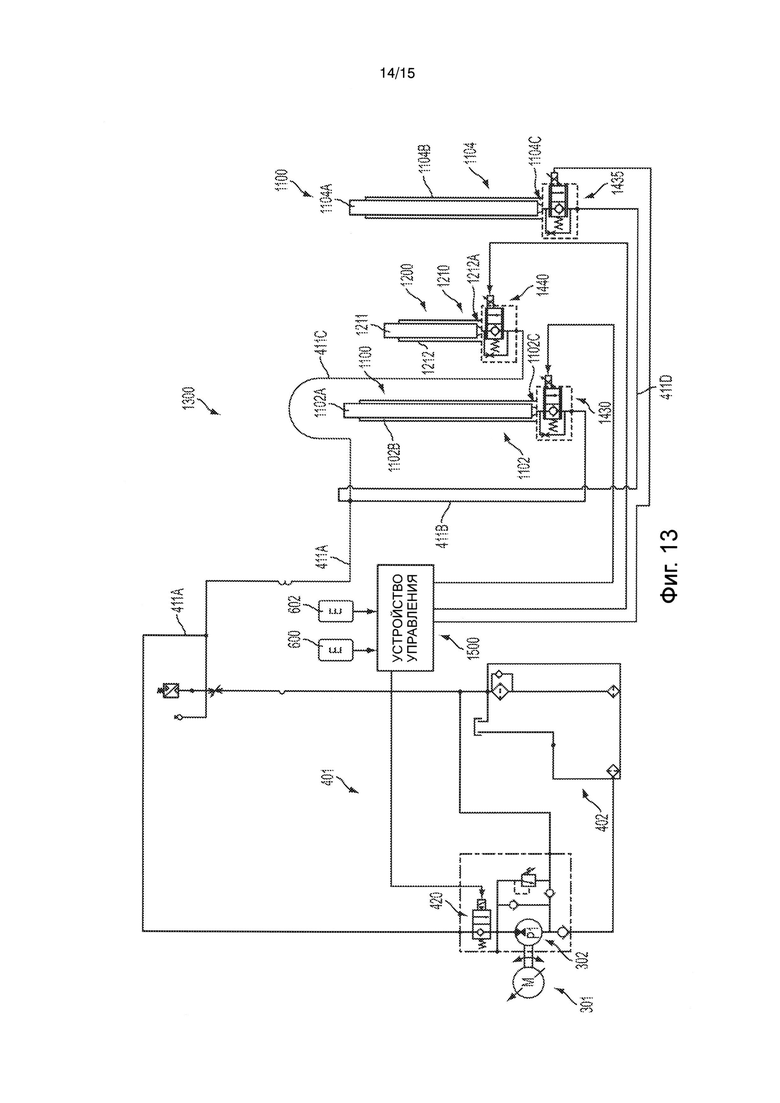
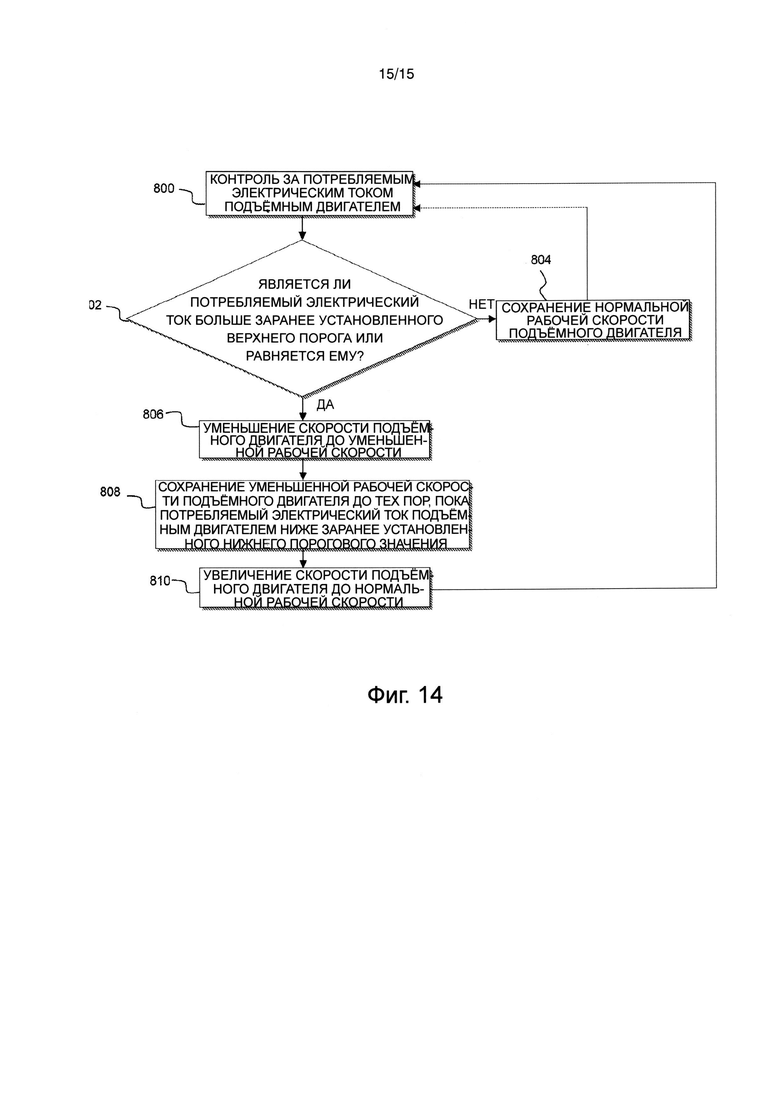
Погрузочно-разгрузочное транспортное средство содержит: несущую конструкцию, включающую в себя неподвижный узел, подвижный узел, соединенный с несущей конструкцией, гидравлическую систему (401) и регулятор (1500). Несущая конструкция дополнительно содержит подъемное устройство (400) для осуществления перемещения подвижного узла относительно неподвижного узла несущей конструкции. Подъемное устройство включает в себя по меньшей мере один узел плунжерного цилиндра. Гидравлическая система включает в себя двигатель (301), насос (302), соединенный с двигателем для подачи жидкости под давлением по меньшей мере к одному узлу плунжерного цилиндра, и по меньшей мере один клапан с электронным управлением, связанный по меньшей мере с одним узлом плунжерного цилиндра, устройство управления может рассчитывать скорость подвижного узла на основании скорости двигателя и управлять работой по меньшей мере одного клапана при использовании расчетной скорости подвижного узла. Изобретение обеспечивает повышение надежности указанного средства. 2 н. и 22 з.п. ф-лы, 15 ил.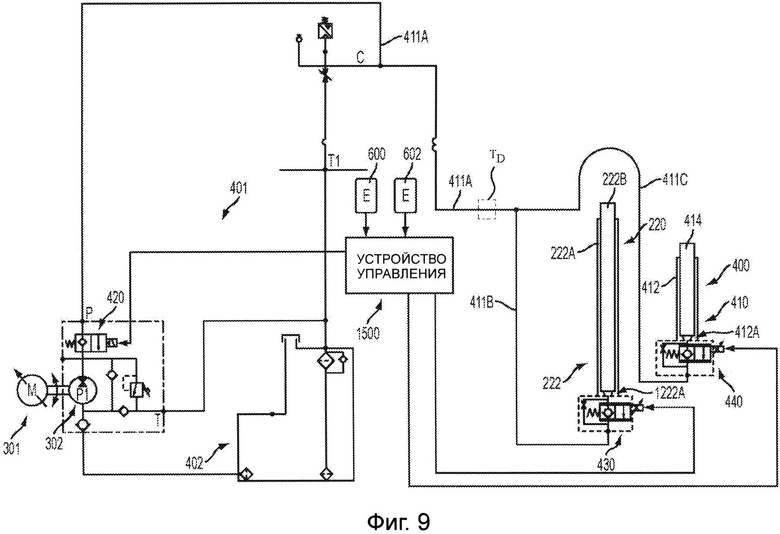
1. Погрузочно-разгрузочное транспортное средство, содержащее:
несущую конструкцию, включающую в себя неподвижный элемент,
подвижный узел, соединенный с упомянутой несущей конструкцией,
упомянутая несущая конструкция дополнительно содержит подъемное устройство для осуществления перемещения упомянутого подвижного узла относительно упомянутого неподвижного элемента несущей конструкции, при этом упомянутое подъемное устройство включает в себя по меньшей мере один узел плунжерного цилиндра;
гидравлическую систему, включающую в себя двигатель, насос, соединенный с упомянутым двигателем для подачи жидкости под давлением по меньшей мере к упомянутому одному узлу плунжерного цилиндра, и по меньшей мере один клапан с электронным управлением, связанный по меньшей мере с упомянутым одним узлом плунжерного цилиндра, и
устройство управления гидравлической системой для:
расчета скорости упомянутого подвижного узла по скорости упомянутого двигателя с определением расчетной скорости;
определения определенной скорости на основе измеренной скорости указанного подвижного узла и
ограничения скорости указанного подвижного узла путем управления работой упомянутого по меньшей мере одного клапана, в случае, если указанная измеренная скорость больше, чем первая предельная скорость, где предельная скорость равна указанной расчетной скорости, умноженной на толерантный множитель.
2. Погрузочно-разгрузочное транспортное средство по п. 1, в котором упомянутое устройство управления способно подавать энергию по меньшей мере к упомянутому одному клапану для открытия по меньшей мере упомянутого одного клапана для обеспечения опускания упомянутого подвижного узла управляемым способом до требуемого положения относительно упомянутого неподвижного элемента несущей конструкции.
3. Погрузочно-разгрузочное транспортное средство по п. 2, в котором упомянутое устройство управления прекращает подачу энергии по меньшей мере к упомянутому одному клапану в ответ на подаваемую оператором команду о прекращении дальнейшего опускания упомянутого подвижного узла относительно упомянутого неподвижного элемента несущей конструкции.
4. Погрузочно-разгрузочное транспортное средство по п. 1, в котором упомянутое устройство управления прекращает подачу энергии к упомянутому по меньшей мере одному клапану, переводя его из рабочего открытого состояния в частично закрытое состояние в случае, когда упомянутый подвижный узел опускается с непредусмотренной скоростью опускания.
5. Погрузочно-разгрузочное транспортное средство по п. 4, в котором упомянутый подвижный узел опускается с непредусмотренной скоростью опускания, когда определенная скорость превышает первую предельную скорость, основанную на расчетной скорости подвижного узла.
6. Погрузочно-разгрузочное транспортное средство по п. 3, в котором по меньшей мере упомянутый один клапан используется в качестве обратного клапана при прекращении подачи энергии для блокирования жидкости под давлением от вытекания по меньшей мере из упомянутого одного узла плунжерного цилиндра и обеспечения потока жидкости под давлением по меньшей мере в упомянутый один узел плунжерного цилиндра во время подъема подвижного узла.
7. Погрузочно-разгрузочное транспортное средство по п. 1, в котором по меньшей мере упомянутый один клапан содержит электромагнитный, нормально закрытый, пропорциональный клапан.
8. Погрузочно-разгрузочное транспортное средство по п. 1, в котором по меньшей мере упомянутый один клапан помещается в основании по меньшей мере упомянутого одного узла плунжерного цилиндра.
9. Погрузочно-разгрузочное транспортное средство по п. 1, в котором
упомянутая несущая конструкция дополнительно содержит приводной узел,
упомянутый неподвижный элемент несущей конструкции содержит неподвижный первый сварной узел мачты, соединенный с упомянутым приводным узлом,
упомянутое подъемное устройство содержит:
второй сварной узел мачты, подвижный относительно упомянутого первого сварного узла мачты,
третий сварной узел мачты, подвижный относительно упомянутых первого и второго сварных узлов мачты;
упомянутый по меньшей мере один узел плунжерного цилиндра содержит:
по меньшей мере один узел плунжерного цилиндра, соединенный между упомянутыми первым и вторым сварными узлами мачты для осуществления перемещения упомянутых второго и третьего сварных узлов мачты относительно упомянутого первого сварного узла мачты;
второй узел плунжерного цилиндра, соединенный между упомянутым третьим сварным узлом мачты и упомянутым подвижным узлом для осуществления перемещения упомянутого подвижного узла относительно упомянутого третьего сварного узла мачты, и по меньшей мере упомянутый один клапан с электронным управлением содержит
по меньшей мере один первый электромагнитный нормально закрытый пропорциональный клапан, связанный по меньшей мере с упомянутым одним первым узлом плунжерного цилиндра; и
второй электромагнитный, нормально закрытый, пропорциональный клапан, связанный с упомянутым вторым узлом плунжерного цилиндра.
10. Погрузочно-разгрузочное транспортное средство по п. 9, в котором упомянутое устройство управления содержит
узел датчиков положения, связанный с упомянутым подвижным узлом для генерирования импульсов датчиков положения по мере перемещения упомянутого подвижного узла относительно упомянутого первого сварного узла мачты, и
регулятор, соединенный с упомянутым узлом датчиков положения и упомянутыми клапанами для приема упомянутых импульсов датчиков положения, генерируемых упомянутым узлом датчиков положения, и определения определенной скорости подвижного узла на основании импульсов узла датчиков положения.
11. Погрузочно-разгрузочное транспортное средство по п 10, в котором упомянутое устройство управления управляет работой по меньшей мере упомянутого одного первого клапана и упомянутого второго клапана посредством сравнения определенной скорости подвижного узла по меньшей мере или с первой предельной скоростью на основании первой расчетной скорости подвижного узла или фиксированной второй предельной скоростью.
12. Погрузочно-разгрузочное транспортное средство по п. 11, в котором упомянутый регулятор устройства управления прекращает подачу энергии к упомянутому первому и второму клапанам, переводя их из активного рабочего открытого состояния в закрытое состояние в случае, когда упомянутый подвижной узел опускается с упомянутой определенной скоростью подвижного узла, превышающей большую из упомянутой одной или упомянутой первой или упомянутой второй предельной скорости.
13. Погрузочно-разгрузочное транспортное средство по п. 12, в котором упомянутый регулятор устройства управления медленно закрывает упомянутые первый и второй клапаны в случае, когда упомянутый подвижной узел опускается с упомянутой скоростью подвижного узла, превышающей большую из упомянутой одной или упомянутой первой или упомянутой второй предельной скорости.
14. Погрузочно-разгрузочное транспортное средство по п. 10, в котором упомянутый регулятор обеспечивает прекращение подачи энергии к упомянутым первому и второму клапанам, переводя их из рабочего открытого состояния в частично закрытое состояние в случае, когда упомянутый подвижный узел опускается с определенной скоростью подвижного узла, превышающей большую из первой или второй предельных скоростей.
15. Погрузочно-разгрузочное транспортное средство по п. 13, в котором упомянутый регулятор переводит упомянутый первый и второй клапаны из активного рабочего открытого положения в закрытое положение по истечении периода времени, составляющего от примерно 0,3 секунды до примерно 1,0 секунды.
16. Погрузочно-разгрузочное транспортное средство по п. 1, в котором упомянутое устройство управления рассчитывает скорость подвижного узла по скорости двигателя посредством: пересчета скорости двигателя в скорость потока жидкости насоса, пересчета скорости потока жидкости насоса в скорость поршня и пересчета скорости поршня в расчетную скорость подвижного узла.
17. Погрузочно-разгрузочное транспортное средство по п. 16, в котором упомянутое устройство управления использует расчетную скорость подвижного узла и определенную скорость подвижного узла для генерирования скорректированного объемного коэффициента полезного действия насоса и использует скорректированный объемный коэффициент полезного действия насоса при расчете последующей расчетной скорости подвижного узла, причем упомянутое устройство управления определяет скорректированный объемный коэффициент полезного действия насоса при использовании нижеследующего уравнения:
скорректированный объемный коэффициент полезного действия насоса = (определенная скорость подвижного узла * текущий объемный коэффициент полезного действия)/(расчетная скорость подвижного узла).
18. Погрузочно-разгрузочное транспортное средство по п. 1, в котором упомянутое устройство управления сконфигурировано для измерения величины электрического тока, потребляемого упомянутым двигателем гидравлической системы или генерируемого им, и для уменьшения рабочей скорости упомянутого двигателя гидравлической системы, если электрический ток, потребляемый упомянутым двигателем гидравлической системы или генерируемый им, превышает заранее установленное предельное значение или равняется ему.
19. Погрузочно-разгрузочное транспортное средство по п. 1, в котором упомянутое устройство управления сконфигурировано для контроля давления жидкости под давлением и для управления упомянутым по меньшей мере одним клапаном для контроля опускания упомянутой несущей конструкции, если контролируемое давление опускается ниже предельного давления.
20. Погрузочно-разгрузочное транспортное средство по п. 19, в котором регулятор определяет предельное давление в зависимости по меньшей мере от максимальной высоты подъема упомянутого подвижного узла или веса груза, перемещаемого упомянутой несущей конструкцией.
21. Погрузочно-разгрузочное транспортное средство по п. 1, в котором упомянутый двигатель гидравлической системы получает энергию от батареи для приведения в движение насоса.
22. Погрузочно-разгрузочное транспортное средство, содержащее
неподвижный сварной узел мачты.
по меньшей мере один подвижный сварной узел мачты, соединенный с упомянутым неподвижным сварным узлом мачты,
подвижный узел каретки вил, соединенный по меньшей мере с упомянутым одним подвижным узлом мачты,
по меньшей мере один первый узел плунжерного цилиндра, соединенный с упомянутым неподвижным сварным узлом мачты и по меньшей мере с упомянутым одним подвижным сварным узлом мачты для осуществления перемещения по меньшей мере упомянутого одного подвижного сварного узла мачты относительно упомянутого неподвижного сварного узла мачты,
второй узел плунжерного цилиндра, соединенный с упомянутым узлом каретки вил и по меньшей мере с упомянутым одним подвижным сварным узлом мачты для осуществления перемещения упомянутого узла каретки вил относительно по меньшей мере упомянутого одного подвижного сварного узла мачты,
гидравлическую систему, включающую в себя двигатель, насос, соединенный с упомянутым двигателем, для подачи жидкости под давлением к упомянутым первому и второму узлам плунжерных цилиндров, и по меньшей мере один первый клапан с электронным управлением и второй клапан с электронным управлением, связанные по меньшей мере с упомянутым одним первым узлом плунжерного цилиндра и с упомянутым вторым узлом плунжерного цилиндра, и
устройство управления гидравлической системой для: расчета скорости упомянутого узла каретки вил относительно упомянутого неподвижного сварного узла мачты по скорости упомянутого двигателя с определением расчетной скорости;
определения определенной скорости на основе измеренной скорости указанного узла каретки вил; и
ограничения скорости указанного узла каретки вил путем управления работой упомянутых первого и второго клапанов, в случае, если указанная измеренная скорость больше, чем первая предельная скорость, где предельная скорость равна указанной расчетной скорости, умноженной на толерантный множитель.
23. Погрузочно-разгрузочное транспортное средство по п. 22, в котором упомянутый двигатель гидравлической системы получает энергию от батареи для приведения в движение насоса.
24. Погрузочно-разгрузочное транспортное средство по п. 22, в котором упомянутое устройство управления управляет работой упомянутых клапанов посредством сравнения определенной скорости узла каретки вил и предельной скорости, определенной на основании расчетной скорости узла каретки вил.
| US 7344000 B2, 18.03.2008 | |||
| US 6293099 B1, 25.09.2001 | |||
| JP 2010083672 А, 15.04.2010 | |||
| Подвижная опалубка | 1979 |
|
SU798260A1 |
| US 2003159576 А1, 28.08.2003 | |||
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА ВИЛОЧНОГО АВТОПОГРУЗЧИКА | 1997 |
|
RU2160696C2 |

