Предлагаемое изобретение относится к области военной техники, а точнее к средствам боевой подготовки операторов систем вооружения, основой последующей боевой деятельности которых является своевременное выполнение предписанных алгоритмов для подготовки и производства выстрела.
Стационарные тренажеры-манипуляторы применяют для обучения и тренировок операторов работе на пультах управления вооружением, наиболее важной частью работы на которых является порядок действий, а не моторика (включение, выключение, установка выбранных режимов работы, запуск узлов и агрегатов изделий боевой техники в выбранном режиме, ввод поправок и т.п.). Органы управления тренажеров-манипуляторов, приборы контроля и индикации делают похожими или такими же, как у реальных образцов (см. например, И.Н. Анашкин, М.Н. Белокур, Н.Д. Мельчаков «Тренировочные и имитационные средства наземной артиллерии», Воениздат МО СССР, Москва, 1977). На таких тренажерах, как правило, отрабатывают отдельные упражнения и нормативы боевой подготовки для последующего их закрепления на реальных образцах.
Общим недостатком таких тренажеров является ограниченность использования (для каждого пульта, прибора, агрегата необходимо разрабатывать специальный тренажер с имитацией конкретных органов управления и индикации) и низкая надежность из-за физического износа имитируемых органов управления. Кроме того, такие тренажеры не предназначены для изучения устройства имитируемого комплекса вооружения, а также имитации неисправностей и отказов элементов комплекса.
В настоящем изобретении предлагается конструкция тренажера-манипулятора, лишенная этого недостатка и позволяющая значительно расширить область применения тренажера для обучения работе на различных системах управления. Предлагаемый тренажер может легко перенастраиваться и на решение других задач путем изменения программного обеспечения без физического моделирования новых органов управления и индикации.
Технический результат - расширение функциональных возможностей тренажера-манипулятора и повышение уровня подготовки обучаемых при изучении устройства имитируемого комплекса вооружения, решении задач подготовки комплекса вооружения к стрельбе и освоения алгоритмов его работы в различных режимах.
Технический результат достигается за счет того, что в тренажер-манипулятор для подготовки операторов комплексов вооружения, содержащий управляющую ЭВМ и имитаторы органов управления и индикации рабочего места оператора, выполненные на сенсорных панелях по числу имитируемых пультов и панелей управления на рабочем месте оператора реального комплекса вооружения, дополнительно введен блок обработки тактильной информации, причем управляющая ЭВМ, имитаторы органов управления и индикации рабочего места оператора и блок обработки тактильной информации соединены в локальную вычислительную сеть (ЛВС) с помощью коммутатора ЛВС.
Блок обработки тактильной информации содержит группу модулей преобразования тактильных сигналов, поступающих с сенсорных панелей имитаторов органов управления и индикации рабочего места оператора при выполнении им требуемой последовательности действий, предписываемой инструкцией по эксплуатации реального комплекса вооружения по числу сенсорных панелей, и модуль сравнения результатов деятельности обучаемого с моделью «идеального оператора», представляющий собой мини-ЭВМ, в память которой предварительно загружена модель «идеального оператора» имитируемого комплекса вооружения, причем первые вход и выход модуля сравнения результатов деятельности обучаемого с моделью «идеального оператора» соединены с коммутатором ЛВС, первые входы каждого из модулей преобразования тактильных сигналов подключены к соответствующим выходам сенсорных панелей, вторые входы - к соответствующим вторым выходам модуля сравнения результатов деятельности обучаемого с моделью «идеального оператора», а выходы модулей преобразования тактильных сигналов подключены к соответствующим вторым входам модуля сравнения результатов деятельности обучаемого с моделью «идеального оператора».
Каждый модуль преобразования тактильных сигналов содержит R-S триггер, ключевые схемы управления разверткой горизонтального (X) и вертикального (Y) каналов соответственно, генератор пилообразного напряжения и дискретные преобразователи каналов X и Y, причем первые входы R-S триггера и генератора пилообразного напряжения подключены к первому выходу модуля сравнения результатов деятельности обучаемого с моделью «идеального оператора», выходы триггера - к соответствующим первым входам ключевых схем управления каналов X и Y соответственно, вторые входы которых подключены к выходу генератора пилообразного напряжения, а выходы - к соответствующим первым входам дискретных преобразователей каналов X и Y, вторые входы которых подключены к соответствующим выходам сенсорных панелей, а выходы - к соответствующим вторым входам модуля сравнения результатов деятельности обучаемого с моделью «идеального оператора».
Модуль сравнения результатов деятельности обучаемого с моделью «идеального оператора» предназначен для оценки качества деятельности обучаемого и может быть выполнен на базе мини-ЭВМ.
Предлагаемый тренажер обладает совокупностью существенных признаков, не известных из уровня техники для изделий подобного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения.
Заявляемый тренажер-манипулятор, по мнению заявителя и авторов, соответствует критерию «изобретательский уровень», т.к. для специалистов он явным образом не следует из уровня техники, т.е. не известен из доступных источников научной, технической и патентной информации на дату подачи заявки.
Сущность предлагаемого изобретения поясняется с помощью графических материалов, где:
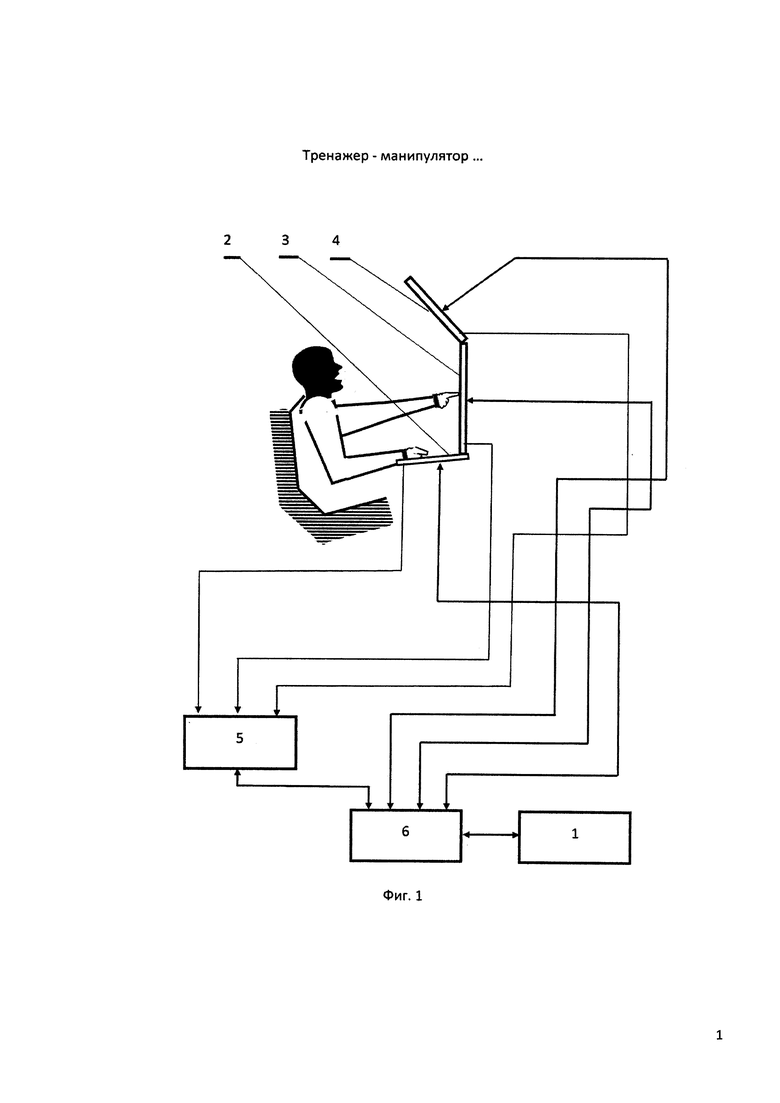
- на фиг. 1 приведена структурная схема тренажера-манипулятора (пример с тремя имитируемыми панелями управления);
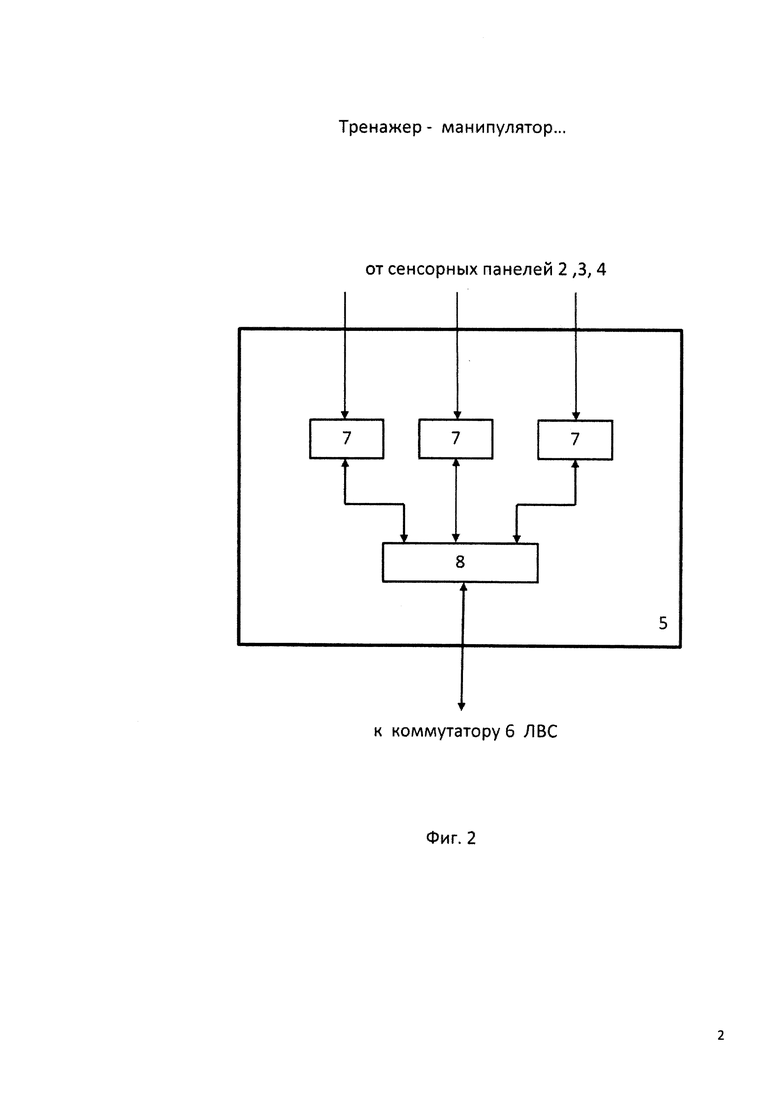
- на фиг. 2 - структурная схема блока обработки тактильной информации;
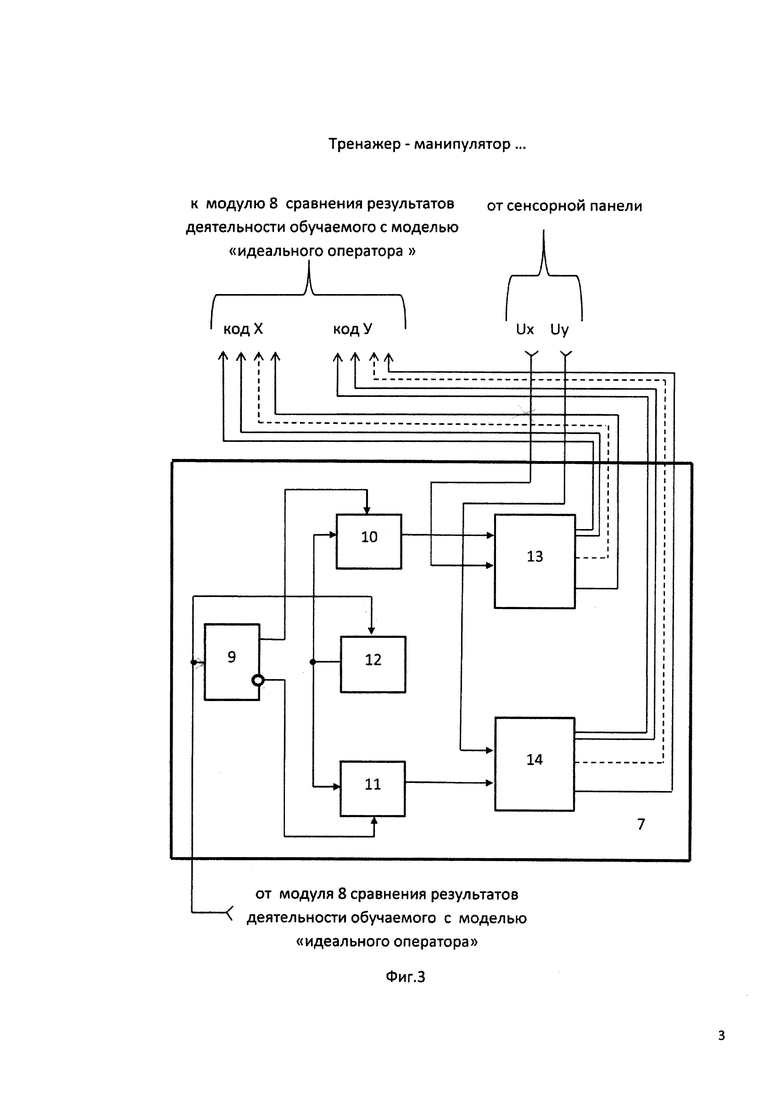
- на фиг. 3 - структурная схема модуля преобразования тактильных сигналов;
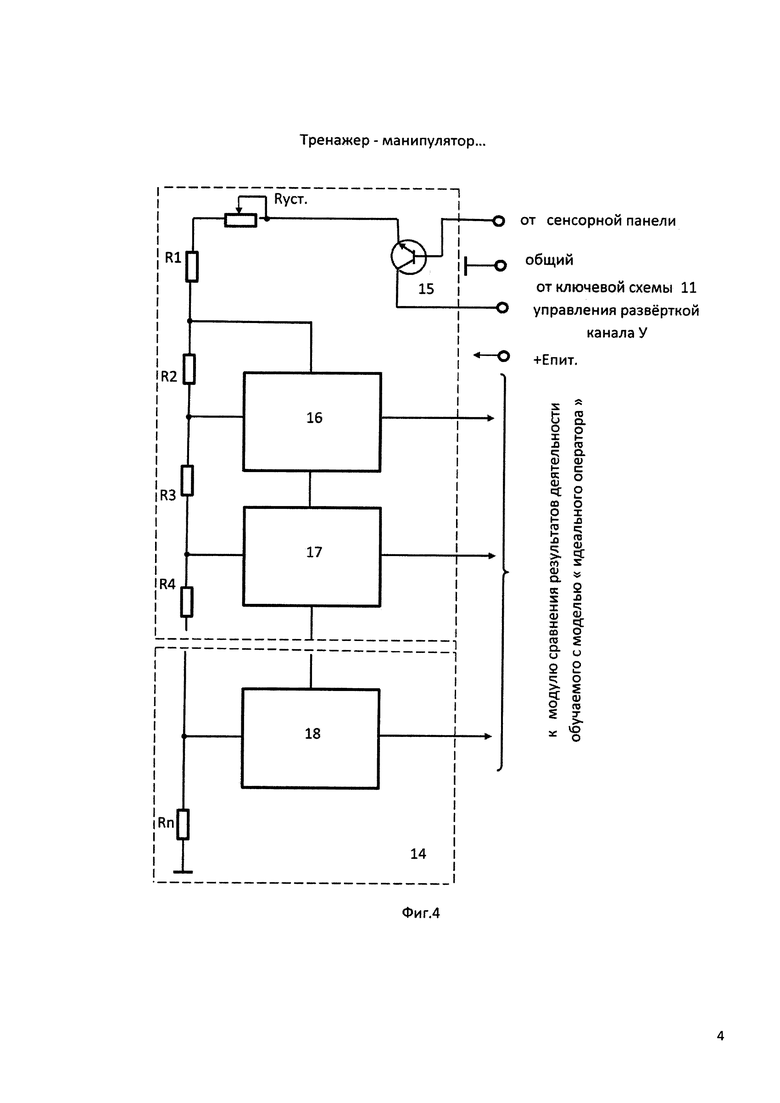
- на фиг. 4 - функциональная схема дискретного преобразователя канала Y.
Предлагаемый тренажер-манипулятор (фиг. 1) содержит управляющую ЭВМ 1 и имитаторы органов управления и индикации рабочего места оператора, выполненные на сенсорных панелях 2, 3, 4 по числу имитируемых пультов и панелей управления на рабочем месте оператора реального комплекса вооружения, а также дополнительно введенный блок 5 обработки тактильной информации, причем управляющая ЭВМ 1, имитаторы органов управления и индикации рабочего места оператора на сенсорных панелях 2, 3, 4 и блок 5 обработки тактильной информации объединены в локальную вычислительную сеть (ЛВС) с помощью коммутатора 6 ЛВС.
Имитаторы органов управления и индикации, как уже отмечалось, выполняются на сенсорных панелях 2, 3, 4 типа тачскрин (от англ. touchscreen) или мультитач, представляющих из себя устройства ввода-вывода, регистрирующие прикосновения к ним и отслеживающие координаты точек прикосновения, которые впоследствии соотносятся с расположенными в этой точке элементами управления (интерфейса). При этом на любой сенсорной панели может имитироваться как один, так и несколько органов управления и индикации адекватно реальному комплексу вооружения.
Блок 5 обработки тактильной информации - это программно-аппаратный модуль, обеспечивающий обработку информации с сенсорных панелей в режиме реального времени (с минимальной задержкой) и сопряжение с одним компьютером нескольких сенсорных панелей, в том числе работающих параллельно. Он содержит (фиг. 2) группу модулей 7 преобразования тактильных сигналов, поступающих с сенсорных панелей 2, 3, 4 имитаторов органов управления, и индикации рабочего места оператора при выполнении им требуемой последовательности действий, предписываемой инструкцией по эксплуатации реального комплекса вооружения (по числу сенсорных панелей), и модуль 8 сравнения результатов деятельности обучаемого с моделью «идеального оператора», представляющий собой мини-ЭВМ, в память которой предварительно загружена модель «идеального оператора» имитируемого комплекса вооружения, причем первые вход и выход модуля 8 сравнения результатов деятельности обучаемого с моделью «идеального оператора» соединены с коммутатором 6 ЛВС, первые входы каждого из модулей 7 преобразования тактильных сигналов подключены к соответствующим выходам сенсорных панелей 2, 3, 4, вторые входы - к соответствующим вторым выходам модуля 8 сравнения результатов деятельности обучаемого с моделью «идеального оператора», а выходы модулей 7 преобразования тактильных сигналов подключены к соответствующим вторым входам модуля 8 сравнения результатов деятельности обучаемого с моделью «идеального оператора».
На фиг. 3 представлена структурная схема модуля 7 преобразования тактильных сигналов, которая содержит R-S триггер 9, ключевые схемы 10 и 11 управления разверткой каналов X и Y соответственно, генератор 12 пилообразного напряжения и дискретные преобразователи 13 и 14 (каналов X и Y соответственно), причем первые входы R-S триггера 9 и генератора 12 пилообразного напряжения подключены к первому выходу модуля 8 сравнения результатов деятельности обучаемого с моделью «идеального оператора», выходы R-S триггера 9 подключены к соответствующим первым входам ключевых схем 10 и 11 управления разверткой каналов X и Y соответственно, вторые входы которых подключены к выходу генератора 12 пилообразного напряжения, а выходы к соответствующим первым входам дискретных преобразователей 13 и 14 каналов X и Y соответственно, вторые входы которых подключены к соответствующим выходам сенсорных панелей 2, 3, 4, а выходы - к соответствующим вторым входам модуля 8 сравнения результатов деятельности обучаемого с моделью «идеального оператора».
Работа любого из модулей 7 преобразования тактильных сигналов заключается в последовательном формировании двоичных параллельных кодов, характеризующих тактильные воздействия на соответствующую сенсорную панель, путем чередующегося опроса выходов X и Y каждой из сенсорной панелей. Частота опроса определяется частотой тактовых импульсов, поступающих от модуля 8 сравнения результатов деятельности обучаемого с моделью «идеального оператора» на вход R-S триггера 9, выходы которого подключены к первым входам ключевых схем 10 и 11 управления разверткой каналов типа 564 ЛЕ5, на вторые входы которых поступает линейно-нарастающее напряжение с генератора 12 пилообразного напряжения, а с выходов ключевых схем 10 и 11 управления разверткой каналов линейно-возрастающие напряжения попеременно поступают на первые входы дискретных преобразователей 13 и 14, на вторые входы которых подаются координатные напряжения Ux и Uy с сенсорных панелей 2, 3, 4, а с выходов дискретных преобразователей 13 и 14 двоичные параллельные коды поступают на соответствующие вторые входы модуля 8 сравнения результатов деятельности обучаемого с моделью «идеального оператора». Дискретные преобразователи каналов X и Y полностью идентичны.
Каждый из дискретных преобразователей 13 и 14 осуществляет преобразование аналоговых сигналов сенсорной панели одного из каналов в параллельный код, соответствующий дискретности представления информации сенсорной панели. Включение дискретного преобразователя производится путем подачи координатного напряжения с сенсорной панели и пилообразного напряжения от ключевой схемы управления разверткой соответствующего канала (например, для канала Y - это ключевая схема 11) соответственно на базу и коллектор транзистора 15.
Схема дискретного преобразователя содержит линейку резистивных делителей напряжения R1…Rn, осуществляющих деление входного напряжения в соответствии с уровнями дискретизации (разрешения) конкретной сенсорной панели (2, 3 или 4), где диапазон (размах) преобразуемого напряжения регулируется резистором Rуст.. С резистивных делителей напряжения сигналы подаются на дискретные преобразователи 16, 17, 18, которые выполнены на базе логических схем И-НЕ типа 561 ЛА7 и преобразуют аналоговые сигналы резистивной линейки R1…Rn в цифровые сигналы (0 или 1), соответствующие каждой строке или столбцу разрешения конкретной сенсорной панели (2, 3 или 4).
С учетом вышеприведенного описания работа тренажера-манипулятора заключается в следующем. Тренажер-манипулятор может работать в трех режимах: режим обучения, режим тренировок и режим зачетного занятия.
В режиме обучения тренажер-манипулятор предъявляет обучаемым информацию об устройстве комплекса вооружения, принципах его работы, выполняемых алгоритмах деятельности в зависимости от поставленной инструктором задачи обучения и возможных неисправностях и отказах отдельных блоков и узлов имитируемого комплекса вооружения. Фактически это автоматизированная обучающая система, представляющая собой электронную инструкцию по эксплуатации. При этом информация, хранящаяся в управляющей ЭВМ 1, поступает на сенсорные панели 2, 3, 4 имитаторов органов управления и индикации рабочего места оператора с соответствующими инструкциями. Блок 5 обработки тактильной информации при этом не работает. Обучаемый включен в систему параллельно и выполняет функции оператора-наблюдателя.
В режиме тренировок из базы данных управляющей ЭВМ 1 (или с внешнего носителя) информация об изучаемом комплексе вооружения, связанная с выполнением алгоритма деятельности оператора обучаемым, поступает на модуль 8 сравнения результатов деятельности обучаемого с моделью «идеального оператора» и сенсорные панели 2, 3, 4 имитаторов органов управления и индикации рабочего места оператора, на которых в соответствии с заданием на тренировку формируются изображения пультов и блоков рабочего места оператора реального комплекса вооружения с виртуальными органами управления и индикации. В соответствии с поставленной задачей (например, по подготовке комплекса к стрельбе или устранению какого-либо имитируемого отказа (неисправности)), требующей выполнения определенного алгоритма действий, обучаемый, получив от инструктора соответствующее указание, последовательно выполняет операции по реализации требуемого алгоритма, вначале просто повторяя действия, указываемые на сенсорных панелях программой «идеального оператора», затем самостоятельно, с постепенным усложнением выполняемого алгоритма или его частей. Оператор включается в систему последовательно и выполняет функции оператора-манипулятора. Данные о результатах его деятельности с тактильных датчиков сенсорных панелей 2, 3, 4 имитаторов органов управления и индикации рабочего места оператора поступают на блок 5 обработки тактильной информации, где они принимаются модулями 7 преобразования тактильных сигналов и «выстраиваются в очередь» по времени поступления, образуя циклограмму работы оператора по выполнению поставленной задачи. Полученная последовательность поступает на модуль 8 сравнения результатов деятельности обучаемого с моделью «идеального оператора», где каждая из выполняемых обучаемым операций сравнивается по времени и точности выполнения с эталоном, ранее снятым с «идеального оператора» и представляющим собой оптимальное решение поставленной задачи. Результат сравнения тотчас отражается на соответствующей сенсорной панели (2, 3 или 4), например, путем приостановки выполняемой задачи и указания ее правильного выполнения. Обучаемый исправляет допущенную ошибку и продолжает выполнение упражнения. После того как упражнение полностью выполнено, получаемая циклограмма деятельности поступает через коммутатор ЛВС 6 на управляющую ЭВМ 1 для сохранения и последующего воспроизведения на индикаторах рабочих мест обучаемого и инструктора при «разборе занятия».
В режиме зачетного занятия тренажер-манипулятор работает аналогично, с той лишь разницей, что при совершении обучаемым ошибки выполнение зачетного задания прекращается, и оператор возвращается на «доучивание», как не сдавший зачет.
Заявляемый тренажер-манипулятор может быть изготовлен с использованием современных технологий и применен как учебно-тренировочное средство для подготовки операторов комплексов вооружения к работе на сложных системах управления со значительным количеством подготовительных операций, которые необходимо выполнить в весьма ограниченное время (например, это оперативно-тактические ракеты, реактивные системы залпового огня и другие системы, реализующие принцип «вижу-стреляю», «выстрелил-забыл», когда наиболее важной частью деятельности оператора является не моторика, а последовательность действий по включению, выключению, переключению, вводу поправок, запуску узлов и агрегатов изделий боевой техники в различных режимах работы, и т.п.). Так как разработчики комплексов вооружения используют различные каналы обнаружения и сопровождения целей (оптический, тепловизионный, радиолокационный), одной из основных задач операторов становится своевременный переход к различным органам управления и реализация существенно отличающихся алгоритмов деятельности с необходимостью согласования систем представления координат визуальной информации и динамических свойств систем управления в различных каналах наведения. Введение блока обработки тактильной информации обеспечит одновременное подключение нескольких сенсорных панелей, на любой из которых могут имитироваться как отдельные органы управления и индикации, так и целые их блоки. При этом возможна организация обучения, при которой «идеальный оператор» может быть как реальным человеком (высококвалифицированным специалистом), так и программной имитацией такого специалиста. Обучаемый, повторяя его действия, может до автоматизма отрабатывать не только отдельные упражнения и нормативы боевой подготовки для последующего их закрепления на реальных образцах, но и нештатные ситуации, связанные с отказами отдельных каналов наведения.
По мнению заявителя и авторов, это может служить доказательством соответствия критерию «промышленная применимость».
Таким образом, заявляемая конструкция тренажера-манипулятора позволяет расширить его функциональные возможности и повысить уровень подготовки обучаемых при изучении устройства имитируемого комплекса вооружения, а также решать задачи подготовки комплекса вооружения к стрельбе и освоения алгоритмов его работы в различных режимах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплексный тренажер боевой машины для подготовки экипажей тяжелой огнеметной системы | 2023 |
|
RU2817338C1 |
| Тренажер для подготовки операторов ПТРК с комбинированной системой наведения | 2018 |
|
RU2692024C1 |
| Устройство для профессионального отбора и обучения операторов систем слежения | 2016 |
|
RU2638410C1 |
| СПОСОБ СОЗДАНИЯ КОМБИНИРОВАННОЙ РЕАЛЬНОСТИ ПРИ ПОДГОТОВКЕ ВОЕННОСЛУЖАЩИХ СУХОПУТНЫХ ВОЙСК И ТРЕНАЖЕР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2592026C1 |
| УЧЕБНЫЙ ТРЕНАЖЕР БОЕВЫХ РАСЧЕТОВ ЗЕНИТНО-РАКЕТНОГО КОМПЛЕКСА | 2022 |
|
RU2787411C1 |
| ТРЕНАЖЕР РАСЧЕТА ПОДВИЖНОГО НАЗЕМНОГО РАКЕТНОГО КОМПЛЕКСА | 2020 |
|
RU2730274C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС АВИАЦИОННЫЙ | 2004 |
|
RU2250511C1 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ МЕХАНИКОВ-ВОДИТЕЛЕЙ ПОДВИЖНЫХ КОМПЛЕКСОВ ВООРУЖЕНИЯ | 2019 |
|
RU2711047C1 |
| Устройство для профессионального отбора и начального обучения операторов систем слежения | 2016 |
|
RU2646395C1 |
| Тренажер для отработки навыков взаимодействия операторов средств ближнего боя | 2015 |
|
RU2671460C1 |
Изобретение относится к области военной техники, а именно к средствам боевой подготовки операторов систем вооружения, основой последующей боевой деятельности которых является своевременное выполнение предписанных алгоритмов для подготовки и производства выстрела. Тренажер содержит управляющую ЭВМ, имитаторы органов управления и индикации рабочего места оператора, выполненные на сенсорных панелях по числу имитируемых пультов и панелей управления на рабочем месте оператора реального комплекса вооружения, и блок обработки тактильной информации. При этом управляющая ЭВМ, имитаторы органов управления и индикации рабочего места оператора и блок обработки тактильной информации соединены в локальную вычислительную сеть (ЛВС) с помощью коммутатора ЛВС. Техническим результатом является расширение его функциональных возможностей и повышение уровня подготовки обучаемых при изучении устройства имитируемого комплекса вооружения. 2 з.п. ф-лы, 4 ил.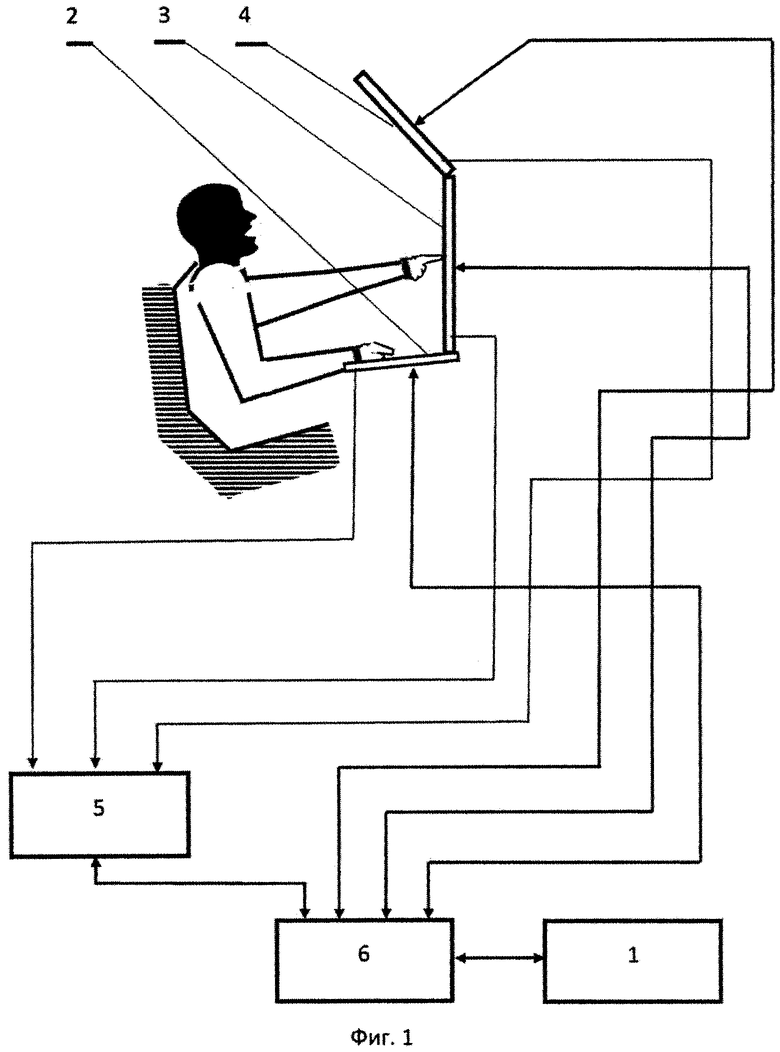
1. Тренажер-манипулятор для подготовки операторов комплексов вооружения, содержащий управляющую ЭВМ и имитаторы органов управления и индикации рабочего места оператора, отличающийся тем, что в него дополнительно введен блок обработки тактильной информации, а имитаторы органов управления и индикации рабочего места оператора выполнены на сенсорных панелях по числу имитируемых пультов и панелей управления на рабочем месте оператора реального комплекса вооружения, причем управляющая ЭВМ, имитаторы органов управления и индикации рабочего места оператора, и блок обработки тактильной информации объединены в локальную вычислительную сеть с помощью коммутатора локальной вычислительной сети.
2. Тренажер-манипулятор по п. 1, отличающийся тем, что блок обработки тактильной информации содержит группу модулей преобразования тактильных сигналов, поступающих с сенсорных панелей имитаторов блоков управления и индикации рабочего места оператора по числу сенсорных панелей, и модуль сравнения результатов деятельности обучаемого с моделью «идеального оператора», представляющий собой мини-ЭВМ, в память которой предварительно загружена модель «идеального оператора» имитируемого комплекса вооружения, причем первые вход и выход модуля сравнения результатов деятельности обучаемого с моделью «идеального оператора» соединены с коммутатором локальной вычислительной сети, первые входы каждого из модулей преобразования тактильных сигналов подключены к соответствующим выходам сенсорных панелей, вторые входы - к соответствующим вторым выходам модуля сравнения результатов деятельности обучаемого с моделью «идеального оператора», а выходы модулей преобразования тактильных сигналов подключены к соответствующим вторым входам модуля сравнения результатов деятельности обучаемого с моделью «идеального оператора».
3. Тренажер-манипулятор по п. 2, отличающийся тем, что модуль преобразования тактильных сигналов включает R-S триггер, ключевые схемы управления разверткой горизонтального (X) и вертикального (У) каналов соответственно, генератор пилообразного напряжения и дискретные преобразователи каналов X и У, причем первые входы R-S триггера и генератора пилообразного напряжения подключены к первому выходу модуля сравнения результатов деятельности обучаемого с моделью «идеального оператора», выходы R-S триггера - к соответствующим первым входам ключевых схем управления разверткой каналов X и У соответственно, вторые входы которых подключены к выходу генератора пилообразного напряжения, а выходы к соответствующим первым входам дискретных преобразователей каналов X и У, вторые входы которых подключены к соответствующим выходам сенсорных панелей, а выходы - к соответствующим вторым входам модуля сравнения результатов деятельности обучаемого с моделью «идеального оператора».
| Пресс для прессования керамических капселей | 1961 |
|
SU144759A1 |
| WO 2011144228 A1, 24.11.2011 | |||
| US 20120189996 A1, 26.07.2012. | |||

