ОБЛАСТЬ ТЕХНИКИ И УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение в целом относится к усовершенствованиям в области доставки лекарственных средств, в частности к системам для подкожной инъекции/аспирации в наполненное текучей средой пространство тела. В частности, настоящее изобретение предлагает способ и устройство для идентификации наполненного текучей средой пространства в тканях тела путем остановки потока текучей среды на основании предварительно определенного результата измерения давления и путем возобновления потока текучей среды после уменьшения давления до значения, которое меньше предварительно определенного результата измерения давления.
Известно, что проводимая с местной анестезией блокада пространства в эпидуральной ткани обеспечивает эффективное временное обезболивание нижних конечностей тела. Она может быть успешно использована при проведении целого ряда инвазивных процедур в организме, включая, без ограничения, процесс родов, замещение тазобедренного сустава протезом, и ряд других хирургических процедур, при проведении которых необходима анестезия нижней половины тела. Она также может быть успешно использована при лечении хронических и острых болей, включая, например, боль в спине, поражения позвонков и сдавление добавочных нервов позвоночного столба. Для обеспечения эффективной местной анестезии и блокировки нервной трансмиссии в ЦНС, в непосредственной близости от спинного мозга на определенном уровне позвоночного столба, на анатомическом участке, называемом эпидуральным "пространством", должен быть размещен достаточный объем раствора местных анестетических средств.
Эпидуральное пространство представляет собой часть позвоночного канала, не занятую твердой мозговой оболочкой и ее содержимым. Эпидуральное пространство расположено между оболочкой и надкостницей, выстилающей внутреннюю поверхность позвоночного канала. Эпидуральное пространство проходит от большого затылочного отверстия до крестцовой щели. Передние и задние корешки нервов, покрытые оболочкой, проходят через эпидуральное пространство и сходятся в межпозвоночных телах и межпозвоночных дисках. Сбоку эпидуральное пространство ограничено надкостницей ножек дуг позвонков и межпозвоночными отверстиями. Ограничивающими эпидуральное пространство сзади конструкциями являются надкостница передней поверхности пластинок дуг позвонков, суставные отростки и их соединительные связки, надкостница основания остистых отростков, и пространства между пластинками, наполненные желтой связкой. Пространство содержит венозные сплетения и жировую ткань, непрерывно связанную с жировой тканью в околопозвоночном пространстве.
Наполненное текучей средой эпидуральное пространство (заднее эпидуральное пространство) представляет собой ограниченный анатомический участок неправильной формы площадью в несколько квадратных миллиметров относительно поперечного сечения позвонков и позвоночного столба. Наполненное текучей средой пространство является крайне узким и расположено в непосредственной близости от оболочки позвоночного столба, причем желтая связка расположена в непосредственной близости от него. Соответственно, необходимо точно определить положение наполненного текучей средой пространства при выходе среза или кончика иглы из желтой связки, так как при дальнейшем проникновении иглы будет проколота оболочка. Стандартный прием обнаружения местоположения наполненного текучей средой эпидурального пространства представляет собой прием "потери сопротивления". В данном приеме используют шприц с низким коэффициентом трения, выполненный из пластика или стекла и соединенный с эпидуральной иглой Туохи (16-18 калибра).
Блокада может быть выполнена, когда пациент находится в сидячем или в лежачем положении на боку. Пациенту нужно предложить принять "позу эмбриона", так как при этом открываются пространства между остистыми отростками и облегчено определение межпозвоночных пространств. Эпидуральные инъекции могут быть выполнены на любом уровне поясничного и грудного отделов позвоночника, что позволяет использовать их при выполнении различных процедур: от торакальной хирургии до процедур, проводимых на нижних конечностях.
Лечащий врач пальпирует позвоночный столб на соответствующем уровне позвоночного столба между позвонками. Осуществляют местную анестезию в поверхностных тканях, что приводит к местному обезболиванию тканей данного участка. Затем дерму прокалывают посредством иглы Туохи, а иглу продвигают, причем врач одновременно оказывает давление на поршень шприца. Оказываемое на поршень давление непреднамеренно приводит к непрерывному выходу объема текучей среды из иглы внутрь тканей.
Введение эпидуральной иглы продолжается, и иглу проводят через надостную связку, причем игла направлена в слегка краниальном направлении. Иглу продвигают в межостистую связку, лежащую на глубине 2-3 см, до тех пор, пока врач субъективно не почувствует повышение сопротивления при прохождении иглы внутрь желтой связки. Иглу проводят дальше до тех пор, пока субъективное "ощущение" сопротивления, испытываемое хирургом, не приведет к выраженному "обратному давлению" на поршень. Врач должен субъективным образом распознать "обратное давление" или возникшее сопротивление для определения местоположения анатомической структуры желтой связки. Наконечник иглы проникает в наполненное текучей средой эпидуральное пространство после прохождения иглы через желтую связку.
Известный недостаток указанного приема заключается в потере текучей среды, вытекающей в ткани, когда наконечник иглы расположен в межостистой связке, вследствие того, что ткани на указанном участке не обладают значительной плотностью.
Глубина перемещения иглы Туохи от момента прокалывания дермы до момента определения желтой связки может значительно варьироваться в зависимости от физических размеров тела пациента. При работе с пациентами, страдающими от чрезмерного веса, использование данного подхода затруднено, а при работе с пациентами, страдающими от патологического ожирения, указанный подход может быть неподходящим вследствие ограничений, накладываемых субъективной сущностью данного подхода. Дополнительным ограничительным фактором является возраст пациента вследствие затруднений, связанных с меньшим размером пространства в эпидуральной ткани. В результате, маленькие дети зачастую подвергаются более опасной процедуре общей анестезии.
К сожалению, при неправильном проведении эпидуральной процедуры, дополнительная текучая среда беспорядочно вводится в ткани при попытках определения местоположения наполненного текучей средой эпидурального пространства. Дополнительная текучая среда, введенная в указанные ткани, может дополнительно усложнить процесс определения наполненного текучей средой пространства.
Кроме того, при перемещении иглы Туохи после обнаружения эпидурального пространства (вследствие удаления шприца или случайного движения руки пациента или врача), игла может быть случайно выведена за пределы пространства в эпидуральной ткани или (в худшем случае) продвинута в твердую оболочку спинного мозга с ее сопутствующей перфорацией, которая может нести за собой долгосрочные последствия для здоровья пациента. Даже в случае, если первоначально эпидуральное пространство обнаружено верно, при дальнейшем продвижении иглы во время введения анестетического раствора, в спинной мозг может быть введена доза анестетического раствора, что приводит к временному или необратимому повреждению нервов.
В медицине широко известны устройства и системы насосов для введения, используемые для доставки или дозированной подачи предписанных лекарственных средств в пациента. Было предпринято множество попыток адаптировать указанные устройства для выполнения эпидуральной инъекции.
Из уровня техники известны попытки использования измерительного преобразователя давления для измерения давления в шприце (см. патент США №5,295,967, Rondelet и др.). Существенный недостаток этих систем состоит в отсутствии возможности регулирования расхода и/или давления текучей среды для компенсации изменений сопротивления во всей системе.
В патенте США №7,922,689 (Lechner) раскрыто устройство для обнаружения анатомической полости, полагающееся на использование оповещения (т.е. звукового или визуального предупреждающего сигнала), требующего ручной модуляции системы доставки лекарственных средств оператором во время процедуры инъекции. Указанное устройство требует наличия непрерывного потока текучей среды для определения эпидуральных тканей, сходно с ручным приемом "потери сопротивления" шприца. Кроме того, устройство основано на относительном слышимом изменении, связанном с уменьшением давления, для определения эпидуральных тканей. Устройство требует субъективной интерпретации событий, на которые должен отреагировать оператор. Кроме того, устройство обеспечивает непрерывную доставку текучей среды для инъекции и пытается выработать давление, достаточное для выполнения вышеуказанной процедуры посредством автоматического устройства насоса шприца. Однако устройство не обеспечивает средств автоматического управления давлением инъекции доставки текучей среды или средств аспирации доставки лекарственных средств во время использования. Соответственно, устройство по патенту США №7,922,689 поддерживает расход для инъекции, несмотря на чрезмерное давление текучей среды, которое может привести к болевым ощущениям и/или повреждению ткани.
Принцип использования давления в качестве измерительного показателя для выполнения безопасной и эффективной эпидуральной инъекции широко известен в медицинской литературе. Давление использовали для определения эпидурального пространства, а важность давления внутри эпидурального пространства была описана рядом исследователей, использовавших ряд различных экспериментальных систем, на протяжении многих лет. Усубиага (Usubiaga) и др. описали взаимоотношение давления и эпидурального пространства при выполнении инъекции в эпидуральное пространство и ткани (Anesth. Analg., 46: 440-446, 1967 г.). Гузенмейер и Уайт описали прием выполнения поясничной эпидуральной инъекции и взаимоотношение с давлением при проведении инъекций беременным пациентам (Br. J. Anaesth., 52:55-59,1980 г.). Другие исследователи, включая Пола (Paul) и Уайлдсмита (Wildsmith) (Br. J. Anaesth., 62:368-372,1989 г.) и Хирабаяси (Hirabayashi) и др. (Br. J. Anaesth., 1990 г., 65:508-513), также оценивали взаимоотношение между давлением и воздействием сопротивления на проведение эпидуральной инъекции. Лакшми Вас (Lakshmi Vas) с сотрудниками использовал указанные принципы в области педиатрической медицины (Pediatric. Anesth. 11:575-583, 2001 г.). Лехнер и др. описали систему эпидуральных инъекций с ручными манипуляциями на основе обратной связи давления (Anesthesia, 57:768-772, 2002 г.; Anesth. Analg. 96:1183-1187, 2002 г.; Euro. J. Anaestheol. 21:694-699, 2004 г.).
Раскрытое в настоящем описании изобретение позволяет повысить надежность и безопасность выполнения эпидуральной инъекции путем ограничения объема текучей среды, необходимого для определения эпидурального пространства. Изобретение также позволяет усовершенствовать известные приемы путем обеспечения заданной границы давления и заданного возобновления потока текучей среды при значениях давления ниже указанной границы давления. Кроме того, при возобновлении системой потока текучей среды обеспечена подача звукового и/или визуального сигнала, что позволяет определить момент ввода иглы в наполненное текучей средой пространство эпидурального участка.
В патенте США №6,200,289 (Хохман и др.) за соавторством заявителя настоящей заявки, включенном в настоящую заявку путем ссылки, раскрыто автоматическое инъекционное устройство, содержащее приводной механизм, обеспечивающий поток терапевтической текучей среды из кассеты, опирающейся на держатель кассеты, трубку и рукоятку с иглой для инъекции. Приводной механизм соединен с электродвигателем и датчиком, расположенным на выходе двигателя и измеряющим усилие, прикладываемое двигателем к приводному механизму. Указанное усилие затем используют для определения внутренней характеристики, такой как сила внутреннего давления, выработанного во время процесса выполнения инъекции. Затем микропроцессор или управляющее устройство использует эту характеристику в качестве управляющего параметра и вырабатывает соответствующие команды для приводного механизма. В наиболее предпочтительном примере реализации указанную характеристику используют для расчета выходного давления, с которым устройство выводит текучая среда по удлиненной трубке. Затем электродвигателем управляют таким образом, что выходное давление поддерживается на заданном уровне для предотвращения болевых ощущений и/или повреждения тканей тела пациента.
Опубликованная патентная заявка US2011/0120566 (Оми и др.) относится к несмежной области техники: способам подачи небиологической текучей среды для изготовления полупроводников на объектах химической и медицинской промышленности. Ссылка на указанную заявку сделана вследствие того, что она содержит идею прерывистого изменения расхода текучей среды с использованием основанного на давлении устройства управления расходом. Зондирование анатомического пространства в указанной заявке не рассмотрено, и специалисту в области разработки аппаратов и способов медицинского лечения не нужно рассматривать указанный несмежный уровень техники.
В опубликованной патентной заявке US2011/0301500 (Мэгуайер и др.) раскрыто автоматизированное устройство для прокалывания сосуда с получением трехмерного изображения в ближнем инфракрасном диапазоне и игла с роботизированным приводом для обеспечения одновременных диагностических испытаний в реальном времени. В заявке указано, что венопункция представляет собой процесс получения пробы венозной крови для выполнения различных испытаний. Обученный персонал берет пробы вручную из вены или органа, расположенного поблизости от поверхности кожи, но указанные процессы имеют ряд специфических недостатков. В указанной ссылке используют получение инфракрасного изображения и иглу с роботизированным приводом для решения проблемы, но не используют значения давления текучей среды для способствования определению наличия вены или органа. Несмотря на то, что в заявке рассмотрено давление, данное упоминание относится к механическому давлению, препятствующему перемещению иглы с механическим приводом для предотвращения повреждения тела пациента, а не к давлению текучей среды в игле.
Также см. опубликованную патентную заявку США US2006/0122555 (Хохман), включенную в настоящую заявку посредством ссылки, в которой раскрыт встроенный датчик давления текучей среды, расположенный между шприцем и трубками, соединенными с иглой для инъекции текучей среды.
Другие патенты, в которых раскрыто использование усилия предварительного механического напряжения (вместо измерительного преобразователя) для обнаружения и управления потоком текучей среды, включают патенты США №№8,197,443 и 8,137,312, в которых раскрыты аппараты и способы обнаружения.
Также см. патент США №8,142,414, в котором описаны способы инъекции текучих сред в суставы с использованием ручного узла, патент США №8,079,976, в котором описана инъекционная система для суставных инъекций, и опубликованную патентную заявку US2006/0122555, в которой описано устройство для введения лекарственных средств для идентификации ткани цереброспинальной оси и периферической нервной ткани с использованием определения выходного давления.
Дополнительная, более свежая работа Лехнера также раскрыта в его патентных заявках US2012/0101410 на блок, узел, устройство и способ испытания измерительных средств, выполненных в медицинском устройстве определения местоположения, и US2012/0022407 на устройство для определения местоположения конструкции внутри тела.
По-прежнему существует необходимость в создании аппарата и способ, обеспечивающих возможность точного управления введением иглы в наполненное текучей средой анатомическое пространство, обладающее меньшим давлением по сравнению с окружающими его тканями, такое как эпидуральное пространство поблизости от позвоночника, межсуставное пространство в суставах, и наполненные текучей средой сосуды тела, причем аппарат и способ выполнены с возможностью управления введением текучей среды в эпидуральное пространство и аспирацией текучей среды из эпидурального пространства, а также аппарат и способ соответствуют требованиям поддержания стерильного поля и стерильных условий.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения состоит в создании способа и аппарата или устройства, позволяющих врачу точно и воспроизводимо осуществлять инъекцию в необходимый участок наполненной текучей средой ткани тела пациента. Устройство и способ ограничивают болевые ощущения и повреждение ткани, связанные с инъекцией, риск осложнений вследствие неправильной инъекции и, что чрезвычайно важно, значительно уменьшают объем текучей среды для инъекции, вводимой в нецелевые ткани. Устройство использует специфические различия в плотности ткани или сопротивлении наполненного текучей средой пространства в тканях, а также сопутствующих значений давления, значительно более низких по сравнению с окружающими органами, соединительной тканью или другими тканями тела.
Известно, что соединительные ткани тела создают давление свыше 200 мм рт.ст. при инъекции в них текучей среды со скоростью 0,07 мл/с. Каждая ткань имеет индивидуальные характеристиками давления и плотности, которые представлены в виде измеряемых давлений, которые могут быть выявлены в заданном виде ткани. Плотность или сопротивление ткани измеряют с использованием давления текучей среды, введение которой проводят посредством управляемой компьютером системы доставки лекарственных средств, выполненной с возможностью обнаружения сопротивления давления во время введения. Также быть отмечено, что наполненные текучей средой пространства, такие как эпидуральные ткани, межсуставное пространство суставов или сосуды тела, обладают давлением, измеряемым во время инъекции и составляющим значительно менее 200 мм рт.ст. По существу, было обнаружено, что наполненные текучей средой пространства имеют значительно более низкое сопротивление давления потоку текучей среды, приближенное к 0 мм рт.ст, при введении в указанные участки наполненной текучей средой ткани.
На основании современного понимания инъекции с заданным целевым участком наполненного текучей средой пространства в ткани, целевой участок может быть определен при помощи системы введения текучей среды под давлением, предотвращающей поток текучей среды до проникновения иглы в наполненное текучей средой пространство в ткани, что позволяет давлению уменьшаться до значения ниже заданного давления в тканях. При использовании заданного максимального значения давления, автоматически предотвращающего непрерывный поток лекарственных средств в окружающие ткани, и возобновляющего поток лекарственных средств лишь после уменьшения давления до значения ниже другого заданного значения, устройство позволяет обеспечить определение наполненного текучей средой пространства на основании возобновления потока текучей среды во время осуществления инъекции.
В устройстве может быть использовано одно или два различных заданных давления (например, первое и третье давление) для остановки потока текучей среды, и другое (например, второе) заданное давление для возобновления потока текучей среды во время осуществления инъекции. Также возможен вариант, в котором первое заданное давление используют для остановки потока текучей среды, а второе заданное давление выбирают таким образом, что оно возобновляет поток текучей среды после успешного определения наполненного текучей средой пространства. Оба варианта позволяют по существу ограничить попадание текучей среды в нецелевые ткани путем устранения необходимости непрерывного потока текучей среды при размещении иглы, и обеспечить определение наполненного текучей средой пространства после возобновления потока текучей среды в тканях пациента. Также может быть использовано третье заданное давление, выполненное с возможностью остановки потока текучей среды по достижении заданной границы давления, меньшей по сравнению с границей вышеописанного первого заданного давления. Указанный вариант обеспечивает еще большую безопасность при осуществлении инъекции текучей среды в случае смещения иглы с целевого участка во время осуществления инъекции пациенту.
Соответственно, инъекционного устройство согласно настоящему изобретению содержит резервуар для текучей среды (устройство для хранения текучей среды), текучую среду для инъекции, нагнетательный механизм, конец, сообщающийся посредством текучей среды с резервуаром и выполненный с возможностью его вставки в тело пациента, датчик, выполненный с возможностью определения результата измерения сопротивления текучей среды для инъекции, и управляющее устройство, выполненное с возможностью приема результата измерения сопротивления от датчика, с возможностью расчета давления и с возможностью регулирования расхода текучей среды для инъекции. Датчик может представлять собой встроенный датчик, размещенный между нагнетательным механизмом и концом, однако предпочтительно датчик размещен между нагнетательным механизмом или шприцем и передним концом набора трубок, измеряющего давление текучей среды для инъекции. В другом варианте датчик может быть размещен внутри механической руки манипулятора.
Датчик, такой как измерительный преобразователь, используют для измерения усилия или давления, создаваемого двигателем и прикладываемого поршнем в устройстве для хранения текучей среды. Согласно одному из аспектов изобретения, измерительный преобразователь измеряет силу между адаптером карпулы и остальной частью корпуса устройства. Согласно другому аспекту изобретения, измерительный преобразователь содержит устройство для определения размера, определяющее изменение размеров элемента устройства, причем указанное изменение указывает на силу давления лекарственных средств внутри устройства и на давление. Например, изменение размера трубок может быть использовано в качестве показателя указанной силы давления. В другом примере реализации давление внутри трубки измеряют снаружи и используют в качестве средств определения давления текучей среды.
Предусмотрено, что управляющее устройство выполнено с возможностью приема вводимых пользователем параметров, включающих, например, заданное максимальное давление, заданное давление возобновления и заданный расход, длину инъекционных трубок, внутренний диаметра инъекционных трубок, вязкость текучей среды для инъекции, состав текучей среды для инъекции и температуры текучей среды для инъекции. Управляющее устройство также выполнено с возможностью регулирования расхода, включая уменьшение расхода по существу до нулевого значения. Управление расходом может быть двоичным (т.е. может быть обеспечен заданный расход, когда измеренное давление меньше заданного максимального давления, и поток может быть остановлен, когда измеренное давление текучей среды меньше заданного максимального давления) или расход может зависеть от давления (т.е. расход увеличивается при уменьшении измеренных значений давления ниже заданного максимального давления). В последнем случае расход при необходимости может иметь заданное значение максимально допустимого расхода. Аналогичным образом, зависимость расхода и измеренного давления текучей среды также может быть задана пользователем. В полезных примерах реализации заданное максимальное давление составляет от примерно 50 мм рт.ст. до примерно 300 мм рт.ст., или от примерно 100 мм рт.ст. до примерно 250 мм рт.ст.
При необходимости, измеренное значение сопротивления давления непрерывно преобразуют в визуальный и звуковой сигнал. Затем результаты измерения предоставляют лечащему врачу, в результате чего врач может определить или подтвердить, осуществлена ли доставка инъекции в надлежащие ткани. Кроме того, результаты измерения также сохраняют для последующего рассмотрения и составления документации, относящейся к клинической процедуре. Верхние границы давления и управление расходом могут быть заданы заранее во избежание использования чрезмерного давления и/или расхода во время указанного процесса.
Соответственно, настоящее изобретение предлагает способ введения инъекции пациенту путем обеспечения резервуара для текучей среды, текучей среды для инъекции, нагнетательного механизма и конца, выполненного с возможностью введения в тело пациента; нагнетания текучей среды из резервуара в тело пациента; расчета давления текучей среды на границе между концом и тканью указанного пациента, и управления расходом текучей среды для инъекции таким образом, что давление не превышает заданного максимального давления, после чего расход текучей среды восстанавливают после уменьшения давления до значения ниже заданного значения давления.
В одном из примеров реализации устройства и способы по настоящему изобретению используют для осуществления эпидуральной инъекции. Во втором примере реализации устройство и способ по настоящему изобретению используют для осуществления инъекции в наполненное текучей средой межсуставное пространство. В обоих примерах реализации текучая среда для инъекции содержит, например, анестетическое средство, а конец выполнен с возможностью введения в наполненное текучей средой эпидуральное или межсуставное пространство в тканях. Предусмотрено, что для определения наполненного текучей средой пространства в тканях во время фазы размещения иглы используют содержащую фармацевтические средства или не содержащую фармацевтические средства текучую среду. Подходящие текучие среды, не содержащие фармацевтические средства, включают, например, физиологический раствор, физиологический раствор с фосфатным буфером, искусственную цереброспинальную жидкость, раствор Рингера, 5% раствор декстрозы или отфильтрованный воздух. После определения наполненного текучей средой пространства в тканях посредством способа разности давлений, текучую среду для инъекции заменяют (т.е. требуется наличие множества резервуаров для текучей среды) на текучую среду, содержащую фармацевтические средства. Использование текучей среды, не содержащей фармацевтические средства, во время фазы размещения иглы позволяет минимизировать или предотвратить введение фармацевтических средств в нецелевые ткани.
Зачастую процедуры, требующие проведения эпидуральной инъекции анестетических средства, являются продолжительными и, в дополнение к первоначальной (нагрузочной) дозе, требуется введение одной или большего количества последующих (поддерживающих) доз. Обычно для введения множества доз используют постоянный катетер. В другом примере реализации изобретение обеспечивает способ осуществления эпидуральной инъекции, требующей проведения множества инъекций, в котором, при введении второй (и последующих) доз, давление текучей среды на границе между концом и тканью указанного пациента рассчитывают, а расходом текучей среды для инъекции во время указанной второй инъекции управляют таким образом, что давление не превышает заданного максимального давления. Сходным образом, указанный прием может быть использован для обслуживания постоянного катетера (т.е. для определения, находится ли катетер в целевой ткани, такой как пространство в эпидуральной ткани), вне зависимости от того, предусмотрена или желательна ли на тот момент дополнительная инъекция.
Также предусмотрено, что инъекционное устройство может быть использовано для аспирации наполненного текучей средой пространства в тканях после его определения. Аспирация может быть использована для извлечения пробы ткани или внеклеточной текучей среды (т.е. цереброспинальной жидкости, межсуставной жидкости, крови и т.д.) или для определения правильного размещения иглы для инъекции. Во время процедуры аспирации "входное давление" измеряют идентично измерению давления внутри наполненного текучей средой пространства в тканях, для которого характерно уменьшение давления. Сходным образом, ложное уменьшение давления также определяют посредством процедуры аспирации вследствие того, что структура внутренней ткани (т.е. кисты) быстро лишается своего содержимого, а входное давление увеличивается до значения, превышающего пороговое значение входного давления.
Двигатель, соединение, связанное с двигателем, и электронное управляющее устройство, раскрытые в нижеприведенном описании, по меньшей мере частично размещены в корпусе аппарата для защиты указанных элементов.
Заполняют устройство для хранения текучей среды и начинают процесс подготовки, во время которого врач размещает предварительно заполненный шприц в приемнике для шприца, расположенный на верхней части инструмента. Врач может изменить расход и пиковое давление текучей среды, предназначенной для дозированной подачи. Затем врач использует средства управления (сенсорный экран или пневматические средства, такие как ножная педаль) и инициирует поток текучей среды. В другом варианте врач может давать электронные или голосовые команды. Во время дозированной подачи текучей среды получаемые от измерительного преобразователя данные используют для расчета текущего давления текучей среды. При приближении указанного давления к заданному порогу, поток текучей среды автоматически останавливают для предотвращения чрезмерного введения лекарственных средств в нецелевые ткани, что позволяет убедиться, что пациент не испытывает ненужных болевых ощущений или повреждения тканей вследствие чрезмерного потока текучей среды. Также обеспечено множество необязательных признаков, включая аспирацию, продувку или зарядку среды с использованием воздуха или без его использования.
Во время всего процесса, врач имеет постоянный доступ к текущим данным, касающимся текущего процесса, с визуальным и звуковым оповещением, включая текущий расход, общий выведенный или аспирированный объем, значения давления ткани, входные давления и другие параметры. Подчиненный микропроцессор получает команды от ведущего устройства обработки данных и вырабатывает приводные сигналы, необходимые для работы двигателя.
В другом примере реализации обеспечена возможность выполнения двух отдельных приводов для обеспечения размещения множества шприцов на одном устройстве. В подобном примере реализации, раскрытом в настоящем описании, первый привод используют с отдельным шприцем, набором трубок и иглой для доставки первых лекарственных средств, а второй привод содержит отдельный шприц, измерительный преобразователь давления, набор трубок и иглу для вторых лекарственных средств. Каждый из приводов выполнен с возможностью выполнения вышеописанных функций. Кроме того, один или два привода могут также быть использованы без возможности определения давления и могут быть использованы исключительно для доставки лекарственных средств при определенном расходе. Этот привод может быть использован для доставки местного анестетика перед использованием второго привода, в котором реализована указанная возможность ограничения заданного давления для определения наполненного текучей средой пространства в тканях.
С учетом вышеописанных преимуществ ограничения ввода лекарственных средств в нецелевой участок соединительной ткани, существует необходимость обеспечения адекватной местной анестезии и введения других лекарственных средств в указанные ткани без ограничения возможности введения терапевтического средства, такого как местный анестетик, для обеспечения поверхностной анестезии мягких тканей перед осуществлением попытки определения наполненного текучей средой пространства в тканях, такого как эпидуральное пространство, межсуставное пространство или другие наполненные текучей средой пространства тела. Соответственно, инструмент с двумя приводами позволяет решить указанные задачи.
Различные инновационные признаки изобретения раскрыты в сопутствующей формуле изобретения, являющейся частью настоящего изобретения. В целях лучшего понимания изобретения, его рабочих преимуществ и конкретных задач, решаемых при его использовании, сделана ссылка на сопутствующие чертежи и подробное описание, в которых проиллюстрирован и описан предпочтительный пример реализации изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На чертежах:
На фиг. 1 показан вид авторизованного узла одноразовых элементов согласно настоящему изобретению;
На фиг. 1А показан вид одного из примеров реализации специального соединителя согласно настоящему изобретению;
На фиг. 1В показан вид второго примера реализации специального соединителя согласно настоящему изобретению;
На фиг. 2 показан вид сверху корпуса управляемого компьютером блока доставки лекарственных средств с узлом одноразовых элементов в месте использования;
На фиг. 3 показан сходный с фиг. 2 вид блока без узла одноразовых элементов;
На фиг. 4 показано схематичное изображение другого примера реализации управляемой компьютером системы доставки лекарственных средств согласно настоящему изобретению;
На фиг. 5А показан увеличенный вид платформы поршня и верхнего конца поршня цилиндра согласно настоящему изобретению;
На фиг. 5В показан сходный с фиг. 5А вид платформы, приближающейся к упору для большого пальца руки или фланцу шприца для большого пальца руки;
На фиг. 5С показан сходный с фиг. 5А вид зацепов или защелок платформы, взаимодействующих с упором шприца для большого пальца руки;
На фиг. 5D показан сходный с фиг. 5А вид платформы, перемещающейся в обратном направлении, на котором показаны зацепы, тянущие обратно упор для большого пальца руки;
На фиг. 6 показан частичный вид приводного блока и его боковой панели;
На фиг. 7 показаны одноразовые компоненты, соединенные в сборке, и ID-соединитель, введенный в боковую часть приводного блока и передающий данные на ЦП в приводном блоке и принимающий данные от него;
На фиг. 8A-8G показаны различные снимки сенсорного экрана приводного блока во время различных фаз работы изобретения;
На фиг. 9 показан схематичный вид в разрезе участка позвоночника пациента, подвергающегося эпидуральной инъекции, причем показаны ткани, через которые будет проходить игла, с корреляцией относительно установок давления согласно настоящему изобретению; и
На фиг. 10 показан вид с частичным разнесением частей узла одноразовых элементов с трубками и иглой, а также с удлиненной иглой для обеспечения соединения между трубками и иглой для улучшения управления и двигательных возможностей при осуществлении инъекции любого вида, в особенности полезной для улучшений при осуществлении инъекций в нижнюю альвеолярную артерию.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Со ссылкой на чертежи, на которых идентичные или сходные элементы обозначены аналогичными ссылочными номерами, на фиг. 1 показан узел 10 одноразовых элементов, состоящий из различных частей, неразъемно соединенных друг с другом, и поставляемый в стерильной упаковке для единичного использования вместе с управляемым компьютером инструментом доставки лекарственных средств или приводным блоком 50, показанным на фиг. 2 и 3, причем указанные элементы вместе формируют систему, схематично показанную на фиг. 4.
Настоящее изобретение относится к системе для определения местоположения и доставки лекарственных средств в наполненные текучей средой ткани, такие как эпидуральное пространство, межсуставное пространство, глазное яблоко, кисты, сосуды и другие наполненные текучей средой пространства в теле пациента. Инъекцию подобных лекарственных средств, таких как, без ограничения, местные анестетические растворы, кортикостероиды, гидроксиапатит, средства для восстановления суставов, склерозирующие агенты и другие средства, в терапевтических целях обычно осуществляют путем введения в наполненное текучей средой пространство в тканях. Важно отметить, что вследствие ряда факторов, введенная текучая среда распространяется по ткани с различной скоростью, что приводит к варьированию давления текучей среды. Заявитель обнаружил, что указанное давление (или внутреннее давление, связанное с сопротивлением давления ткани) указывает на различные виды тканей и может быть использовано для их идентификации.
Настоящее изобретение обеспечивает способ и устройство, позволяющие врачу точно обнаруживать наполненное текучей средой пространство в тканях и ограничить проникновение лекарственных средств в нецелевые ткани. Указанный процесс выполняют в рамках диагностической и терапевтической процедуры. Настоящее устройство использует давление текучей среды из иглы или катетера ("инжектора") после размещения иглы или катетера в ткани для верного определения точности размещения и для контроля (верного) размещения во время осуществления инъекции или аспирации. В частности, настоящее устройство использует заданное первое давление для предотвращения потока лекарственных средств на нецелевом (первом) участке ткани и для возобновления потока текучей среды после уменьшения давления до значения ниже заданного значения давления. В дополнительном примере реализации устройство может использовать первое заданное первое давление для предотвращения потока лекарственных средств и второе отличное заданное давление, до значения которого давление должно дойти для возобновления потока. Использование заданного давления обеспечивает точное размещение иглы или катетера во время фазы введения, фазы выполнения инъекции и фазы обслуживания процедуры. Сначала давление используют во время введения иглы или катетера для определения анатомических структур и обеспечения возможности точного определения врачом момента, когда полость инжектора располагается внутри наполненного текучей средой пространства в тканях. Следовательно, прерывистый поток лекарственных средств используют для определения заданной целевой ткани.
Заданное давление также используют для предотвращения потока лекарственных средств при определенном значении, а затем обеспечивают возобновление потока текучей среды в случае, если заданное значение давления ниже указанного значения. Указанный процесс может быть выполнен во время фазы обслуживания процедуры для удостоверения в том, что инжектор расположен в целевых тканях, таких как пространство в эпидуральной ткани. Во время выполнения медицинских процедур существует определенный риск, требующий выполнения первоначальной эпидуральной инъекции (т.е. нагрузочной дозы) с последующими периодическими поддерживающими дозами для поддержания необходимого уровня обезболивания. Обычно в эпидуральное пространство вводят постоянный катетер, остающийся прикрепленным к инъекционному устройству в течение всей процедуры. Зачастую в промежутке между нагрузочной дозой и одной или большим количеством поддерживающим дозами пациента перемещают. В результате указанного перемещения правильно размещенный катетер может смещаться из пространства в эпидуральной ткани в нецелевую ткань. Настоящее устройство отслеживает давление при введении всех периодических доз (т.е. нагрузочной дозы и всех последующих поддерживающих доз). Следовательно, лекарственные средства не вводят в нецелевые ткани и в ткани, введение лекарственных средств в которые не имеет терапевтического значения. Кроме того, в случае смещения катетера в фазе обслуживания врач получает оповещающий сигнал. Настоящее устройство использует прерывистый поток текучей среды и заданные значения давления для точного определения верного размещения постоянного катетера, и ограничивает поток лекарственных средств в нецелевые ткани.
Таким образом, преимущества настоящего устройства по сравнению с уровнем техники включают: (i) средства для идентификации наполненного текучей средой пространства в тканях, такого как эпидуральное пространство, межсуставное пространство, глазное яблоко, кисты и кровеносные или другие сосуды для текучей среды, но не ограниченного указанными структурами, с использованием ничтожного объема содержащего лекарственные средства раствора, (ii) средства для идентификации нецелевых тканей путем ограничения потока лекарственных средств от первой границы заданного давления, (iv) средства контроля размещения иглы или катетера в течение всей процедуры катетеризации (т.е. во время фаз обслуживания введения лекарственных средств) путем контроля потока лекарственных средств в наполненном текучей средой пространстве.
Согласно принципам настоящего изобретения, давление измеряют с использованием давления или силы текучей среды, инъекцию или введение которой проводят посредством управляемой компьютером системы доставки лекарственных средств, выполненной с возможностью обнаружения сопротивления давления во время введения. Измеренное значение сопротивления давления непрерывно преобразуют в визуальный и звуковой сигнал, причем поток лекарственных средств является прерывистым. Управляемую компьютером систему доставки лекарственных средств непрерывно регулируют на основании вырабатываемого давления с обеспечением прерывистого потока текучей среды. Соответственно, расход варьируется и зависит от давления системы. Предусмотрено, что давление представляет собой главную управляющую переменную системы.
Соответственно, расход становится вторичной переменной, регулируемой в рамках заданного диапазона для поддержания необходимого потока текучей среды. В одном из примеров реализации, поток текучей среды останавливают при значениях давления, превышающих заданный порог (максимальное давление). Расход, представляющий собой вторичную переменную, может быть ограничен, в результате чего инъекции текучей среды не являются нежелательно быстрыми в условиях низкого давления. Предусмотрено, что взаимоотношение между давлением и расходом текучей среды может быть двоичным или непрерывным. Двоичное взаимоотношение присутствует в случае, если инъекционное устройство выполнено с возможностью доставки текучей среды с одним заданным расходом при любом давлении, меньшем относительно заданного максимума. Соответственно, поток текучей среды либо остановлен, либо разрешен вне зависимости от того, превышает ли давление пороговое значение. В другом варианте расход может регулироваться в виде функции давления. В этом случае расход уменьшается при приближении к максимальному значению давления, и возрастает по мере уменьшения давления. При необходимости, расход может быть ограничен первым заданным максимальным давлением, причем расход восстанавливают при втором отдельном заданном давлении.
Также предусмотрено, что инъекционное устройство при необходимости может содержать средства записи и/или отображения значимых данных об инъекции, включая, например, мгновенное значение расхода, значения давления и объем инъекции. Все результаты измерений и данные могут быть предоставлены врачу в реальном времени, в результате чего врач может определить, происходит ли доставка инъекции в заданный участок и/или целевые ткани, и может соответствующим образом изменить прием введения инъекции. Кроме того, результаты измерения также могут быть сохранены для последующего рассмотрения и составления документации, относящейся к клинической процедуре.
Также предусмотрена возможность использования множества шприцов, приводимых отдельными поршнями шприцов, для обеспечения возможности введения множества лекарственных средств, а также возможность использования второго привода шприца, не требующего достижения заданного значения давления для любой из указанных целей. Второй привод может быть запрограммирован на использование конкретного расхода для обеспечения введения лекарственных средств, таких как местный анестетик и другие терапевтические средства, в ряд тканей.
В другом примере реализации устройство может содержать два отдельных привода шприцов, причем оба привода выполнены с возможностью регулировки на основании давления текучей среды согласно вышеприведенному описанию.
Авторизованный узел одноразовых элементов
Изобретение включает инновационную конструкцию узла одноразовых элементов или узла одноразового пользования, состоящего из шприца, измерительного преобразователя, набора трубок и иглы, а также одного из ряда уникальных специальных соединительных адаптеров (называемых в настоящем описании "ID-соединителями"), закрепляемыми и используемыми в качестве части узла одноразового пользования, используемого вместе с управляемой компьютером системой доставки лекарственных средств. На фиг. 1 показан один из примеров реализации узла одноразового пользования согласно настоящему изобретению.
Управляемая компьютером система доставки лекарственных средств согласно настоящему изобретению, показанная на фиг. 2, 3 и 4, обеспечивает множество полезных преимуществ для пациентов вследствие обеспечения более точных инъекций. Изобретение также обеспечивает множество клинических преимуществ для врачей вследствие обеспечения лучших результатов. Инструменты, осуществляющие изобретение, показаны на чертежах для обеспечения более точного и безопасного введения лекарственных средств в ряде областей, таких как эпидуральные инъекции, межсуставные инъекции и другие подкожные инъекции. Использование исключительно авторизованных одноразовых компонентов чрезвычайно важно для обеспечения надлежащей работы указанных инструментов. Применение неправильных компонентов может привести к ряду нежелательных результатов, включая:
1. Введение неправильных объемов.
2. Неверные результаты измерения расхода и давления.
3. Использование неподходящих компонентов, приводящее к ошибкам.
4. Использование неадекватно сконструированных неавторизованных заменительных компонентов.
Для обеспечения того, что надлежащие одноразовые компоненты используются вместе с управляемой компьютером системой доставки лекарственных средств согласно настоящему изобретению, обеспечено наличие специального соединителя 12 (по фиг. 1). Соединитель 12 имеет первую и вторую сопрягаемые детали 14 и 16 и выполнен с возможностью обеспечения уникального соединения и/или соединения электрической схемы и/или передачи необходимых данных перед использованием. Соединитель 12 выполняет функцию управляющего элемента между частями 10 узла одноразовых элементов, состоящих из шприца 18, измерительного преобразователя 20 давления, набора 22 трубок и иглы 24, а узел соединен с управляемым компьютером инструментом 50 доставки лекарственных средств по фиг. 2 посредством штекера 30.
На настоящий момент не существует конструктивных средств для обеспечения подтверждения выбора одноразовых компонентов, используемых вместе с управляемым компьютером инструментом доставки лекарственных средств.
Специальное адаптерное соединение 12 согласно настоящему изобретению позволяет убедиться, что в комбинации с инструментом используют исключительно авторизованные, верно настроенные, имеющие правильные размеры и стерилизованные узлы 10 одноразовых элементов. Указанная задача решена посредством нижеприведенных конструктивных решений.
Соединение 12 электронным образом соединяет встроенный электронный измерительный преобразователь 20 давления с управляемым компьютером инструментом 50 доставки лекарственных средств посредством внешнего кабеля 21 передачи данных от измерительного преобразователя 20 на первую сопряженную деталь 14, подключенную ко второй сопряженной детали 16 и соединенную посредством второго кабеля 23 и штекера 30, подключенного к инструменту 50. Измерительный преобразователь 20 давления выполнен встроенным, то есть соединен непосредственно между концом 19 цилиндра шприца 18 и одним концом 25 трубок 22, например, посредством соединения типа Люэр, неразъемно закрепленной согласно нижеприведенному описанию, в результате чего инструмент определяет и использует мгновенное фактическое давления текучей среды на линии доставки лекарственных средств, что обеспечивает точное приближение фактического мгновенного давления текучей среды на кончике или наконечнике иглы 24, и соответственно, на участке в теле пациента, на котором расположен наконечник.
Электронный преобразователь давления или датчик 20 выдает данные о давлении по электронному кабелю передачи данных и соединителю 21-12-23, соединенному непосредственно с блоком 50 для сбора таких результатов измерения давления. Подтверждение или точка авторизации может быть обеспечена путем включения специального промежуточного соединения 12 между электронным измерительным преобразователем 20 давления и управляемым компьютером инструментом 50 доставки лекарственных средств. Специальное соединение 12 используют для идентификации и подтверждения соединенных компонентов. Одноразовые компоненты 10 предоставлены в виде авторизованного одноразового неразъемного набора, в котором все компоненты склеены друг с другом, т.е. шприц 18 неразъемно соединен с набором 22 трубок, а электронный датчик давления или электронный преобразователь 20 давления неразъемно соединен между ними, и все элементы вплоть до первой сопрягаемой детали 14, неразъемно соединены друг с другом. Узел 10 одноразовых элементов используют и утилизируют в виде единого блока. Узел также соединен с приводным блоком 50 посредством второй сопрягаемой детали 16, которая может быть соединена исключительно с первой специальной сопрягаемой деталью 14 для обеспечения исключительно одноразового использования исключительно авторизованных узлов 10 одноразовых элементов.
Электронный измерительный преобразователь 20 давления может представлять собой, например, любой из различных пьезоэлектрических датчиков давления, предоставляемых компанией Merit Medical Systems, Inc., таких как изделие Meritrans® Pressure Transducer MER212.
Специальное соединение 12, раскрытое в настоящем описании, называют "ID-соединителем". ID-соединитель 22 состоит из двух компонентов: штекера 14 ID-соединителя и индивидуального приемника 16 ID-соединителя. Вследствие того, что функции "штекера" и "приемника" могут быть взаимно изменены, или каждый из элементов может иметь признаки штекера и приемника, указанные детали в настоящем описании также называют первой и второй сопрягаемыми деталями 14 и 16.
Система ID-соединителя 12 выполнена в виде электронного физического моста между инструментом 50 и авторизованным, склеенным, одноразовым набором или узлом 10 одноразовых элементов. Штекер 14 ID-соединителя содержит две противоположные функциональные стороны 14а и 14b согласно фиг. 1А, введенные друг в друга и неразъемно соединенные друг с другом. Одна из сторон 14а представляет собой стандартный штекер или розетку, обеспечивающую соединение со стандартным компонентом, таким как существующий электронный измерительный преобразователь давления (т.е. изделие Meritrans Pressure Transducer MER212) с одноразовыми компонентами. Противоположная сторона 14b ID-соединителя 14 представляет собой индивидуальную сторону штекера ID-соединителя и имеет один стандартный конец, вводимый в сторону 14а, и специальную противоположную сторону. Согласно вышеприведенному описанию, стороны 14а и 14b неразъемно соединены друг с другом. Сторона 14b индивидуального штекера ID-соединителя соединена посредством своей специальной сопрягаемой стороны, т.е. индивидуального набора 14с выступов и углублений, со вторым компонентом или приемником 16 ID-соединителя посредством его специальной сопрягаемой стороны, т.е. соответствующего набора 16а выступов и углублений. Данное соединение между 14с и 16а выполнено разъемным, в результате чего могут быть использованы заменяющие наборы 10 одноразового пользования. Часть 16 соединена с приводным блоком 50 посредством электронного кабеля 23 и штекера 30 согласно фиг. 1 и 2. Система ID-соединителя или соединитель 12 выполнен в виде множества различных уникальных конфигураций для обеспечения дополнительных комбинаций "розетка-штепсель" согласно фиг. 1В для обеспечения специального соединения собственной разработки, обеспечивающего уникальный характерный признак системы, что обеспечивает подтверждение перед использованием.
Согласно фиг. 1, другая схема авторизации изобретения включает компьютерный микрочип, СИМ-схему или другую схему 14d с уникальным кодом, которая также электрически соединена с приводным блоком 50 посредством кабеля 23 при сопряжении частей 14 и 16, и считывается программой или схемой авторизации в блоке 50. Если кодированная схема 14d является истинной, блок 50 работает в нормальном режиме; в обратном случае, блок выключается, а на экран блока выводится предупреждение, такое как "Обнаружен Неавторизованный Шприц", а также при необходимости, генерируется предупреждающий звуковой сигнал, включая, без ограничения, голосовую версию сообщения, предупреждающий звуковой сигнал или другой предупреждающий сигнал или любая комбинация сигналов. Кодированная схема 14d также запрограммирована на единичное использование, причем программа или схема авторизации выполнена с возможностью определения использования определенного одноразового набора 10 ранее, и в подобном случае, схема также выключает блок 20 и выводит предупреждение. Кодированная схема 14d может также быть запрограммирована с учетом физических (например, трубки, иглы и калибра шприца) и химических (например, содержимого шприца) свойств одноразового узла 10, которые также считываются схемой или программой в блоке 50. В подобном случае кодированная схема устанавливает, принудительно изменяет или модифицирует любые установки, вручную введенные в блок 50, с учетом свойств узла одноразового пользования для обеспечения надлежащей и безопасной работы блока.
Кодированная схема 14d также может быть обеспечена с использованием или без использования специальных механических признаков по фиг. 1А и 1В, но использование обоих элементов увеличивает надежность системы. В любом случае, неудачная попытка распознавания надлежащей связи (физической, электрической или цифровой) предотвращает работу инструмента 50.
Таким образом, изобретение предусматривает инновационное штепсельное соединение системы 12 ID-соединителя для замыкания необходимой цепи и обеспечения работы инструмента по подтверждению, определению подлинности и считыванию данных с надлежащего набора одноразовых элементов, выбранного для указанного инструмента. Электронное соединение в системе ID-соединителя обеспечивает цифровые данные посредством запоминающего устройства в схеме 14d элемента 12 соединителя. Инновационное штепсельное соединение ID-соединителя может также обеспечивать уникальную связь интерфейса "ключ-замок", таким образом подтверждая компоненты, используемые в комбинации с инструментом 50.
Одна или большее количество из вышеописанных мер безопасности могут быть использованы по отдельности или в любой комбинации. Уникальная система 12 ID-соединителя расположена между текущим электронным измерительным преобразователем 20 давления и приводным блоком 50, однако предполагается, что система ID-соединителя может быть связана, склеена или соединена с другими компонентами, используемыми с указанным инструментом, например, исключительно со шприцем или исключительно с набором трубок. В предпочтительном примере реализации ID-соединитель размещен между указанными двумя связями, однако предполагается, что указанная система ID-соединителя может быть соединена на целом ряде различных участков интерфейса и может сохранять функции, предназначенные для подтверждения и идентификации уникального одноразового набора.
Насадка 12 работает следующим образом:
систему ID-соединителя вручную прикрепляют на стыке интерфейса рядом различных способов; и
в предпочтительном примере реализации система ID-соединителя представляет собой часть полного набора 10 одноразовых элементов, содержащего шприц, измерительный преобразователь, набор трубок и иглу.
В предпочтительном примере реализации неразъемное прикрепление иглы может быть необязательным, в результате чего врач может выбрать предпочтительную иглу для решения определенной задачи. Компоненты собирают отдельно или, в предпочтительном примере реализации, их склеивают (например, посредством адгезива) друг с другом и предоставляют в виде единого одноразового набора, что позволяет убедиться в выборе надлежащих одноразовых компонентов.
Предпочтительный пример реализации представляет собой одноразовый набор с прикрепленным посредством адгезива ID-соединителем. Предусмотрено, что в комбинации с инструментом 50 может быть использован ряд конфигураций. Указанные конфигурации состоят из компонентов различного размера, т.е. иглы, шприца, набора трубок и измерительных преобразователей давления. Интеграция системы ID-соединителя позволяет обеспечить авторизованный набор, а также обеспечивает возможность взаимодействия с инструментом 50 для подтверждения и идентификации используемого одноразового набора. Указанный этап важен для подтверждения подлинности компонентов системы. Указанный этап обеспечивает использование надлежащих компонентов и/или лекарственных средств. Предусмотрено, что заранее наполненный шприц 18 с лекарственными средствами может быть предоставлен вместе с системой 12 ID-соединителя и набором 10 одноразовых элементов, или шприц может быть предоставлен пустым и может быть заполнен необходимыми лекарственными средствами, физиологическим раствором или другой текучей среды на месте. В случае использования заранее наполненных шприцов 18 ID-соединитель 12 (в микрочипе 14d) содержит данные, относящиеся к указанным лекарственным средствам, размещенным в шприце и предоставленным для использования в инструменте.
Усовершенствования относительно уровня техники включают ID-соединитель для подтверждения использования надлежащих компонентов доставки лекарственных средств в комбинации с управляемой компьютером системой доставки лекарственных средств. Система ID-соединителя также позволяет разрешить множество недостатков одноразовой инъекционной системы. Важно отметить, что система не изменяет трудовой процесс во время подготовки инструмента, но обеспечивает использование указанного инновационного компонента. Система ID-соединителя не добавляет дополнительных этапов, и обеспечивает подтверждение подлинности компонентов, используемых в общей системе, и т.д. Использование системы ID-соединителя также обеспечивает уменьшение материальных затрат при обеспечении подтверждения подлинности.
На фиг. 10 показаны части узла одноразовых элементов согласно другому примеру реализации изобретения, в частности, трубки 22 с концом 22 неразъемно соединены со встроенным датчиком давления, не показанным на фиг. 10. Данный пример реализации содержит жесткую и стерильную пластиковую рукоятку 27, прикрепленную к противоположному концу трубок 22, и содержит соединение типа Люэр для съемного соединения с выбранной иглой 24 для осуществления определенного вида инъекции на выбранном анатомическом участке. Удлиненная рукоятка 27 по указанному примеру реализации улучшает ручное управление и двигательные возможности при размещении иглы, в частности вследствие наличия поворотного управления. Указанная конфигурация особенно важна при осуществлении инъекций в нижнюю альвеолярную артерию, но также позволяет улучшить осуществление эпидуральных инъекций и других видов инъекций.
Предпочтительно, длина удлиненной рукоятки 27 составляет примерно 15 см (примерно 6 дюймов), или находится в предпочтительных пределах от примерно 10 до 20 см, причем трубки 22 имеют длину примерно 122 см (примерно 48 дюймов).
Управляемое давлением инъекционное устройство
Согласно вышеприведенному описанию, инъекционное устройство, пример которого представлен в виде приводного блока 50 на фиг. 2, 3 и 4, использует прерывистый поток текучей среды для непрерывного контроля давления посредством электронного измерительного преобразователя 20 давления, причем указанное давление предпочтительно представляет собой давление текучей среды во время осуществления инъекции. На основании заданного давления, установленного врачом и сохраненного в запоминающем устройстве 80 микропроцессора или компьютера 82 электронной части в блоке 50, поток текучей среды останавливают, а на основании заданного давления поток текучей среды возобновляют. Возможен вариант, в котором для обоих указанных режимов используют одно заданное давление. В подобном случае давление растет до заданного уровня при первоначальном проникновении текучей среды в ткань, после чего поток текучей среды прекращается при уменьшении давления ниже указанного заданного уровня. Затем поток текучей среды возобновляется с образованием прерывистого потока текучей среды.
Изобретение обладает заданными уровнями давления для обеспечения потока текучей среды в целевые участки тканей и ограничения потока лекарственных средств в нецелевые ткани. Это позволяет врачу избирательно вводить лекарственные средства на определенные участки и в целевые ткани при осуществлении диагностических и терапевтических процедур. Заранее выбранные максимально допустимые границы давления и/или расхода сохранены в запоминающем устройстве 80 и задают максимальные рекомендуемые значения давления, которые пациенты способны выдержать, или другие критерии. При приближении давления к указанному пограничному значению, вырабатывается визуальный и/или звуковой оповещающий врача сигнал, т.е. на экране 62 и посредством динамика 84, активизируемых при получении данных от микропроцессора 82. Кроме того, описательные данные всего процесса осуществления инъекции сохраняют для последующего анализа в запоминающем устройстве 80, согласно вышеприведенному описанию.
Способ осуществления инъекций в наполненное текучей средой пространство
В нижеследующем описании приведен примерный способ осуществления эпидуральной инъекции. Указанные принципы и способы могут быть легко адаптированы для осуществления инъекций в другие ткани и анатомические участки, помимо эпидурального пространства.
Врач задает первую заданную верхнюю границу давления. Обычно первая заданная верхняя граница давления не превышает 200 мм рт.ст. Предусмотрено, что при использовании указанного параметра инъекционная система вводит ничтожный объем лекарственных средств в соединительные ткани, а затем путем выбора второго заданного давления ниже 50 мм рт.ст., при котором поток текучей среды возобновляется. Следовательно, игла правильно размещена в наполненном текучей средой пространстве эпидурального пространства ткани вследствие того, что давление внутри эпидурального пространства ткани предположительно составляет от примерно +15 мм рт.ст. до -15 мм рт.ст., в то время как давление, присущее желтой связке, составляет выше 200 мм рт.ст.
Результаты измерений известного давления внутри внесвязочных тканей обычно составляют примерно 100-200 мм рт.ст. Вследствие того, что инъекционное устройство 50 имеет второе заданное давление, при котором поток текучей среды возобновляется, т.е. 50 мм рт.ст. или ниже, после проникновения иглы в подкожные ткани значительного потока текучей среды не наблюдают вследствие того, что давление быстро растет и сохраняется на высоком уровне при нахождении иглы в подкожных тканях (внесвязочных тканях). В соответствии со стандартным методом осуществления эпидуральной инъекции, врач продвигает иглу Туохи и доводит ее до желтой связки. Поток текучей среды по-прежнему отсутствует вследствие того, что, согласно вышеприведенному описанию, желтая связка оказывает давление свыше 100 мм рт.ст. После прохождения через желтую связку (т.е. при входе иглы в наполненное текучей средой эпидуральное пространство), давление мгновенно уменьшается до значения ниже 50 мм рт.ст., что при необходимости приводит к визуальному отображению и/или звуковому сигналу и/или голосовому сообщению, такому как "Обнаружено эпидуральное пространство", а содержащая лекарственные средства текучая среда начинает вытекать на заданный целевой участок. Следовательно, прерывистый поток текучей среды используют для определения целевых тканей. Возможен вариант, в котором первое и второе значения заданного давления заданы идентичными для обеспечения потока текучей среды лишь после уменьшения давления до значений ниже заданного значения давления.
Датчик 20 давления или множество датчиков давления инъекционного устройства 50 обеспечивают автоматическую функцию безопасности в случае выхода иглы для инъекции из эпидурального пространства ткани (например, вследствие ошибки врача или перемещения пациента) или в случае нарушения проходимости устройства. В случае, если игла 24 выходит из эпидурального пространства ткани путем отведения через желтую связку или соприкосновения с твердой оболочкой, давление немедленно возрастает до значения первого выбранного давления Р1, что приводит к замедлению и итоговой остановке потока текучей среды при значениях давления текучей среды, превышающих 200 мм рт.ст. Было выявлено, что указанный процесс занимает примерно 2 секунды (см. Ghelber-Regional Anesthesia and Pain Medicine, том 33, №4, 2008 г., стр. 349, фиг. 2). При необходимости указанное изменение давления от менее 50 мм рт.ст. до свыше 200 мм рт.ст. вновь приводит к подаче визуального или звукового оповещения для оповещения врача о некорректном размещении иглы. Поток вновь восстанавливается автоматически после повторного размещения иглы в эпидуральном пространстве ткани и уменьшения мгновенного значения давления на кончике иглы до значений ниже Р1 или, в другом примере реализации изобретения, после уменьшения давления до второго выбранного значения давления Р1 (равного или меньшего 50 мм рт.ст.). Указанная автоматическая функция безопасности инъекционного устройства помогает предотвратить введение анестетического раствора в спинной мозг.
На фиг. 9 показан участок позвоночника пациента для осуществления эпидуральной инъекции. Начиная с наружного участка для инъекции для кончика иглы 24 слева на фиг. 9, ткани на указанном участке включают различные слои кожи, жировой и соединительной тканей 110, за которыми расположено эпидуральное пространство 112, являющееся интересующим анатомическим пространством в предпочтительном примере реализации изобретения. За эпидуральным пространством 112 расположена твердая оболочка 114 спинного мозга 116. Очевидно, важно, чтобы перемещение наконечника иглы 24 вправо (согласно чертежу) через ткани прекращалось до достижения спинного мозга, и указанная задача решена в настоящем изобретении. Также показаны поперечные сечения костей позвоночника на указанном участке.
Согласно изобретению, микропроцессор 82 и запоминающее устройство 80 запрограммированы с первым давлением Р1, составляющим, например, примерно 200 мм рт.ст., и выбранным таким образом, что оно равно или превышает мгновенное значение давления текучей среды на кончике иглы при ее проникновении и перемещении по ткани 110. При давлении, равном или превышающим давление Р1, двигатель 96 останавливают, и поток текучей среды к кончику иглы прекращается. При проникновении кончика иглы в эпидуральное пространство, мгновенное давление текучей среды уменьшается до значения ниже Р1, и микропроцессор заново запускает двигатель для возобновления потока текучей среды, теперь в эпидуральное пространство 112 согласно одному из примеров реализации изобретения. Согласно второму примеру реализации изобретения, для возобновления потока текучей среды необходимо, чтобы было достигнуто второе выбранное значение давления Р2, хранимое в запоминающем устройстве 80. В третьем примере реализации изобретения, при достижении сохраненного в запоминающем устройстве 80 третьего выбранного значения давления Р3, превышающего значение Р2, но меньшего относительно значения Р1, поток текучей среды вновь останавливают. Достижение указанного третьего значения давления Р3 указывает на то, что кончик иглы уперся в твердую оболочку 114 или другим образом покинул целевое анатомическое пространство. Пространства или слои, через которые проходит кончик иглы, коррелируют с установками давления P1, Р2 и Р3 согласно изобретению по фиг. 9.
Первое выбранное давление Р1 для остановки потока текучей среды предпочтительно составляет примерно 200 мм рт.ст. для эпидуральной инъекции, но может находиться в пределах от примерно 25 до примерно 300 мм рт.ст. в зависимости от ткани, первоначально прокалываемой кончиком иглы. Давление Р2 для возобновления потока текучей среды предпочтительно составляет примерно 50 мм рт.ст. для эпидуральной инъекции, но может находиться в пределах от примерно 20 до примерно 150 мм рт.ст. в зависимости от интересующего анатомического пространства. Третье выбранное давление Р3 для повторной остановки потока текучей среды предпочтительно составляет примерно 125 мм рт.ст. для эпидуральной инъекции, но может находиться в пределах от примерно 80 до примерно 180 мм рт.ст. в зависимости от интересующего анатомического пространства. Использование трех заданных значений давления улучшает управление по типу "поток/нет потока" по мере перемещения кончика иглы через ткани различных видов для любого наполненного текучей средой анатомического пространства, выполненного с возможностью приема текучей среды при меньшем значении давления по сравнению с тканями, окружающими анатомическое пространство.
Признаком настоящего инъекционного устройства и сопутствующего способа является возможность быстро и точно определить "ложную потерю сопротивления" или "ложноположительный результат" (обычно в течение 2-4 секунд). Ложная потеря сопротивления обычно происходит при использовании стандартного ручного приема введения шприца с ощущением потери сопротивления, а уменьшение сопротивления происходит при проникновении эпидуральной иглы в кисту или менее плотное пространство вне эпидурального пространства ткани. Известно, что связки на указанном участке являются менее плотными, и ложная потеря сопротивления возникает нередко. Зачастую субъективная природа указанного анатомического местоположения может привести врача к ложному убеждению в успешном обнаружении эпидурального пространства ткани. При использовании управляемой компьютером системы доставки лекарственных средств с управлением давлением, после проникновения иглы в подобное пространство, игла быстро заполняет пространство или оказывает давление на менее плотную ткань посредством текучей среды, и записываемое давление увеличивается до значений выше 200 мм рт.ст., что объективно указывает на "ложную потерю сопротивления". Подобного исхода обычно невозможно достичь при использовании стандартного ручного приема введения шприца или системы, предусматривающей непрерывный поток лекарственных средств из насоса шприца. В подобных случаях, при обнаружении первоначальной потери сопротивления, шприц перемещают, и оператор доставляет дозу текучей среды (уже прекратив субъективный поиск "потери сопротивления"), соответственно вводя анестетический раствор в анатомическое местоположение вне целевого эпидурального пространства ткани (вновь см. Ghelber-Regional Anesthesia and Pain Medicine, том 33, №4, 2008 г., стр. 350, фиг. 3 представляет собой линейный график, демонстрирующий ложную потерю сопротивления на временной отметке примерно 250 с). Указанный результат скорее всего связан с тканью связок, измеренной во время осуществления эпидуральной инъекции. Структура неверной ткани была быстро подвержена воздействию давления с отображением измеренного значения давления текучей среды свыше 200 мм рт.ст. Введение катетера в эпидуральное пространство и последующая инъекция текучей среды не приводят к значительному и быстрому росту давления, что указывает на правильное расположение катетера.
Предусмотрено, что для определения эпидурального пространства ткани во время фазы размещения иглы процедуры эпидуральной инъекции используют не содержащую фармацевтические средства текучую среду. Подходящие текучие среды, не содержащие фармацевтические средства, включают, например, стерильный физиологический раствор, искусственную цереброспинальную жидкость, раствор Рингера, 5% раствор декстрозы или отфильтрованный воздух. После определения эпидурального пространства ткани посредством разности давлений, текучую среду для инъекции заменяют на содержащую фармацевтические средства текучую среду. Использование текучей среды, не содержащей фармацевтические средства, во время фазы размещения иглы позволяет минимизировать или предотвратить введение фармацевтических средств в нецелевые ткани.
Другим признаком настоящего устройства и методологии является объективная сущность давления, измеряемого управляемым компьютером устройством доставки лекарственных средств, причем контроль давления осуществляют во время всех фаз процесса осуществления инъекции. Соответственно, врач более не полагается на субъективное "ощущение", а получает объективные данные абсолютных значений при выполнении каждой из фаз указанного важнейшего приема.
Преимущества при выполнении каждой из фаз приема обеспечены благодаря возможности непрерывного контроля давления при использовании прерывистого потока лекарственных средств, позволяющей вносить изменения, обеспечивающие лучшую безопасность и эффективность выполнения инъекции.
В другом примере врач может заново устанавливать заданное максимально допустимое значение давления после проникновения иглы в наполненное текучей средой пространство и начала осуществления инъекции. Согласно вышеприведенному описанию, до проникновения иглы в эпидуральное пространство давление текучей среды составляет свыше 200 мм рт.ст., в результате чего доставляется ничтожный объем текучей среды (или не доставляется вовсе). После проникновения иглы в наполненное текучей средой пространство давление уменьшается до значений ниже нуля и постепенно растет до значений в 1-10 мм рт.ст. Уменьшение давления запускает поток текучей среды из инъекционного устройства. На этом этапе максимальное заданное значение давления может быть изменено на новое, меньшее максимальное значение. Например, заданное максимальное давление, при котором поток текучей среды прекращается, может быть уменьшено до 25 мм рт.ст., что обеспечивает дополнительный уровень безопасности для пациента в случае контакта иглы для инъекции с твердой оболочкой или отведения иглы из эпидурального пространства. Новое (меньшее) заданное максимальное давление приводит к более ранней остановке потока текучей среды с меньшим объемом вводимой в нецелевые ткани текучей среды по сравнению с исходным заданным значением. Изменение заданного максимального давления, останавливающего поток текучей среды, может быть осуществлено врачом вручную или автоматически посредством управляющего элемента в инъекционном устройстве.
Следует понимать, что пример значения в 200 мм рт.ст. в качестве заданного максимального давления для остановки потока текучей среды приведен исключительно в иллюстративных целях, и может быть выбрано большее или меньшее заданное давление по усмотрению врача. Кроме того, второе заданное значение давления в 50 мм рт.ст., при котором поток текучей среды возобновляется, приведено исключительно в иллюстративных целях, и может быть выбрано большее или меньшее заданное давление по усмотрению врача. Принципы и приемы могут быть модифицированы для осуществления инъекции в почти любое анатомическое местоположение. Особо важным фактором в настоящем примере реализации способа и устройства является возможность задавать и выбирать заданные значения давления для обеспечения прерывистого потока лекарственных средств для осуществления диагностического или терапевтического введения средств.
Раскрытые в настоящем описании приемы в равной степени применимы к тканям человека и животных.
Прерывистый поток текучей среды с одной или большим количеством отдельных границ давления в комбинации с автоматическим определением аспирации текучей среды
При подготовке к использованию блока 50, и со ссылкой на фиг. 1, 2 и 3, узел 10 одноразовых элементов по фиг. 1 вынимают из стерильной упаковки, а заранее наполненный корпус 18 шприца вжимают в полуцилиндрическое гнездо 52 для шприца, выполненное в верхней поверхности корпуса блока 50 согласно фиг. 2 и 3. Корпус 18 шприца плотно и неподвижно удерживают в гнезде 52 посредством двух пружинных зажимов 54, а осевое перемещение корпуса шприца ограничено посредством пальцевого фланца 90, проходящего до верхнего конца шприца 18 и взаимодействующего с выступом 55 для пальцевого фланца соответствующей формы. Поршень 70 шприца 18, находящийся в полностью вытянутом положении, в котором шприц полностью заполнен (см. фиг. 2), размещен в выемке 56 для поршня в верхней поверхности корпуса блока, причем выемка имеет достаточную длину, ширину и глубину для размещения и подвешивания поршня 70 без соприкосновения с ним, в результате чего поршень может быть беспрепятственно вжат в корпус шприца.
Подвижная платформа 58 с тремя пружинными фланцевыми защелками или зацепами 60, установленными на платформе 58 с возможностью поворота, выполнена с возможностью перемещения под управлением компьютера вдоль выемки 56 для поршня. Согласно нижеприведенному более подробному описанию, платформу 58 перемещают вправо на фиг. 2 и 3 до тех пор, пока платформа 58 не будет расположена достаточно близко к фланцу 72 шприца 18, для обеспечения взаимодействия обращенных скошенных поверхностей трех зацепов 60 с фланцем 72 снизу и с его противоположных сторон, для расширения под воздействием продолжающегося перемещения платформы 58, и последующего защелкивания на участке под фланцем 72. Затем датчик в блоке 50 измеряет сопротивление дальнейшему перемещению платформы 58, а платформа останавливается. Вследствие того, что в этом положении поршень 70 по существу прикреплен в осевом направлении к платформе 58 вследствие зацепления защелок 60 за фланец 72, любое дальнейшее перемещение платформы 58 влево или вправо также приводит к перемещению поршня 70 вправо, т.е. для выведения текучей среды из корпуса шприца, или влево для аспирации текучей среды обратно в корпус шприца.
Датчик 20 давления узла 10 подключен к специальному соединителю 12, а соединитель 12 подключен к блоку 50 посредством штекера 30.
Согласно вышеприведенному описанию, настоящее изобретение относится к системе обнаружения целевого участка и ведения с использованием прерывистого потока текучей среды с одним или большим количеством (или "более чем с одним") границ значений давления и к системе автоматического определения аспирации.
Система состоит из приводного блока 50 и компонентов 10 одноразового пользования. Приводной блок 50 содержит микропроцессор или центральный блок 82 обработки данных (CPU), электронную печатную плату 92, источник 94 питания и электронный двигатель или двигатели 96 (вследствие того, что в примере реализации по фиг. 4 могут быть использованы два шприца). Каждый электронный двигатель 96 поворачивает спиральный вал 98, перемещающий арматуру 100 шприца в направлении кпереди и кзади. Арматура 100 шприца содержит тензодатчик для обнаружения усилия. Арматура 100 соединена с платформой 50 для ее перемещения в любом из указанных направлений. Кроме того, согласно вышеприведенному описанию, одноразовый набор 10 содержит инновационный компонент 12 идентификации и связи, шприц 18, встроенный измерительный преобразователь 20 давления, набор трубок 22 и иглу 24.
Подробное описание последовательности рабочих операций
На виде сверху инструмента показана полость 52 и выемка 56, в комбинации называемые гнездом шприца, обеспечивающим правильное размещение в нем стандартного шприца 18 объемом 20 см3. Внутри выемки 56 для поршня расположена подвижная арматура 100 и платформа 58, взаимодействующая с упором или фланцем 72 для большого пальца руки одноразового шприца 18. Механизм, зацепляющий упор шприца, содержит ряд пружинных зацепов 60, показанных в увеличенном виде на фиг. 5А и автоматически захватывающих упор шприца для большого пальца руки.
Согласно фиг. 5В, при зацеплении упора 72 для большого пальца руки пружинные зацепы 60 перемещаются кнаружи, поверх, и затем зацепляют упор для большого пальца руки в виде зацепа. Указанное действие позволяет зафиксировать упор для большого пальца руки согласно фиг. 5С, что позволяет платформе 58 осуществлять механическое перемещение поршня 70 шприца в любом из указанных направлений (перемещение кзади показано на фиг. 5D), обеспечивая возможность осуществления аспирации. Кроме того, в конструкцию арматуры 100 шприца встроен датчик усилия. Арматура 100 шприца использует оптические и механические признаки для идентификации положения шприца и может рассчитать объем текучей среды, присутствующей внутри шприца.
Этап 1: Приводной блок 50 приводят в положение "Вкл" посредством отдельной боковой панели 64, лучше всего показанной на фиг. 6 и содержащей кнопки "Вкл/Выкл", "Старт/Стоп", "Прочистка" и "Аспирация Вкл/Выкл", а также индикаторы заряда батареи. Кнопка "Вкл/Выкл" обеспечивает энергией приводной блок и интерфейс 62 сенсорного ЖК-дисплея. Подача мощности автоматически переводит механизм 100 арматуры шприца в "исходное" положение по фиг. 3.
Согласно фиг. 3, арматура 100 шприца с подвижной платформой 58 шприца с приемником упора 52, 56 для большого пальца руки для автоматического запуска аспирации соединена с подвижной арматурой шприца, расположенной на верхней части приводного блока.
На верхней части приводного блока показана конструкция, т.е. гнездо для шприца, выполненная с фиксаторами или зажимами 54 на поверхности. Указанные фиксаторы 54 взаимодействуют с поверхностью цилиндра шприца 18 с интерфейсом при размещении шприца внутри гнезда для шприца для обеспечения временного запирания шприца в гнезде для шприца.
Этап 2: Приводной блок 50 требует использования ряда одноразовых компонентов. Согласно вышеприведенному описанию, одноразовый набор 10 по фиг. 1 содержит нижеописанные компоненты системы.
Шприц 18 - в предпочтительном примере реализации использован стандартный шприц объемом 20 см3 производства Becton Dickinson, Inc.
Конструкция не ограничена возможностью использования шприца определенного размера или объема. Оператор заполняет шприц текучей средой из соответствующего стерильного контейнера, такого как многодозный флакон или одноразовая стеклянная ампула. Оператор может полностью заполнить шприц или частично заполнить шприц, причем функция автоматического определения определяет объем лекарственных средств, содержащийся в шприце.
В предпочтительном примере реализации использован встроенный измерительный преобразователь 20 давления, такой как встроенный измерительный преобразователь давления «Meritrans®» компании Merit Medical, Саут-Джордан, Юта. Предусмотрено, что датчик усилия в арматуре шприца может предоставлять данные о давлении текучей среды, в результате чего нет необходимости в использовании вторичного датчика давления.
Подкожная полая игла 24 - в предпочтительном примере реализации использована игла Туохи, такая как игла Туохи Becton Dickinson 20G х 3.5'' от компании Becton Dickinson, Франклин Лэйкс, Нью-Джерси.
Набор 22 стерильных трубок - 48-дюймовые трубки для измерения артериального давления от ICU Medical, Inc., Сан-Клементе, Калифорния.
Одноразовый соединитель (ID-соединитель) 12 для идентификации - ID-соединитель представляет собой специальный компонент и является частью раскрытого в настоящем описании изобретения. ID-соединитель подтверждает, что с приводным блоком связаны надлежащие и рекомендованные изготовителем шприц, набор трубок, встроенный датчик давления и игла. В предпочтительном примере реализации ID-соединитель неразъемно прикреплен к датчику давления и набору трубок, и предоставлен в виде единого компонента. Также возможен вариант, в котором изобретение содержит все одноразовые элементы, предоставленные в виде индивидуального набора, что позволяет оператору соединять ID-соединитель с отдельными компонентами для использования устройства.
Затем ID-соединитель соединяют с приводным блоком посредством съемного соединительного штепселя 30, такого как штепсель RJ-11 по фиг. 1 и фиг. 7. Предусмотрена возможность использования электрического соединения, отличного от штепселя RJ-11. Может быть изготовлен оригинальный электронный штепсель.
Предусмотрена возможность использования в ID-соединителе любых и всех других средств передачи и соединения с ЦП приводного блока, включая, без ограничения, инфракрасную связь, связь WiFi, связь по протоколу Bluetooth или другие беспроводные средства.
Предусмотрено, что подтверждение одноразового узла может также быть выполнено с использованием маркировки, включая штрих-код и считыватель штрихкода или какие-либо другие оптические средства обнаружения.
ID-соединитель соединен с ЦП приводного блока для передачи данных, связанных с одноразовыми элементами. В предпочтительном примере реализации ID-соединитель ограничивает количество циклов возможной работы приводного блока с одноразовым набором. Указанная функция может ограничивать использование на основании физического цикла приводного блока и/или на основании измеренного времени. Кроме того, функция предотвращает повторное использование ранее использованных или нестерильных одноразовых элементов, обеспечивая безопасность пациента. ID-соединитель также обеспечивает надлежащий выбор одноразовых компонентов. В предпочтительном примере реализации ID-соединитель неразъемно соединен с наибольшим возможным количеством одноразовых компонентов, т.е. посредством клея, термической связи или химической связи, с встроенным датчиком давления и набором трубок. Тем не менее указанная конфигурация не является необходимой для надлежащей работы блока.
Предусмотрена возможность шифрования дополнительных данных в ID-соединителе, таких как, без ограничения:
Данные о лекарственных средствах, такие как название средства и технология приготовления, изготовитель средства, номер партии;
Данные, касающиеся узлов одноразовых элементов;
Данные, касающиеся срока хранения лекарственных средств;
Данные, касающиеся стерильности одноразового набора; и
Дата и время использования ID-соединителя.
В предпочтительном примере реализации шприц 18 объемом 20 см3 соединен с измерительным преобразователем 20 Meritans с прикрепленным ID-соединителем и набором 22 48-дюймовых трубок для измерения артериального давления. На дистальном конце набора трубок присоединена игла 24 Туохи (полая) согласно фиг. 1, 2 и 7.
Этап 3: После введения шприца 18 в приемник для шприца, оператор просматривает изначальный экран 62 с сообщением "Загрузите шприц и нажмите "Продолжить"" на приводном блоке 50. Интерфейс 62 сенсорного экрана позволяет оператору нажать на кнопку "Продолжить", обеспечивающую соприкосновение приемника аспирации автоматического зацепления с упором шприца для большого пальца руки. См. фиг. 8В. Приводной блок может обнаруживать и подтверждать введение надлежащих одноразовых элементов в инструмент посредством ряда признаков. Конструктивные признаки подтверждения включают.
1. Уникальный детектор-соединитель идентификации (ID-соединитель), выполненный с возможностью соединения с ЦП для подтверждения выбора и прикрепления к приводному блоку надлежащего узла одноразовых элементов. В случае обнаружения ID-соединителем неверного выбора одноразового узла или попытки повторного использования одноразового узла, приводной блок предотвращает дальнейшую работу и отображает предупредительное сообщение и/или издает звуковой сигнал. ID-соединитель также выполнен с возможностью ограничения количества циклов, выполняемых с использованием одного одноразового набора. ID-соединитель управляет системой и работает непосредственно и/или опосредованно через ЦП. Данные передают на соединитель или от него в обоих направлениях, и, следовательно, ЦП может сохранять или изменять содержимое и данные на ID-соединителе во время работы.
2. Признак автоматического обнаружения шприца использует удерживающие зацепы приемника аспирации автоматического зацепления для подтверждения выбора шприца надлежащего размера. Подтверждение устанавливают на основе размера упора шприца для большого пальца руки и диаметра между зацепами приемника аспирации автоматического зацепления. В случае, если размер шприца и размер приемника не совпадают, зацепы не способны зацеплять упор для большого пальца руки. Загруженный шприц первоначально обнаруживают посредством арматуры шприца приводного блока, содержащей тензодатчик. Перемещение арматуры шприца кпереди автоматически останавливают при обнаружении сопротивления на упоре шприца для большого пальца руки. После зацепления приводимыми пружинами зацепами упора шприца для большого пальца руки, арматура шприца меняет направление движения на противоположное. В предпочтительном примере реализации при использовании упора для большого пальца руки меньшего диаметра для шприца размера, отличного от шприца объемом 20 см3, зацепляющие зацепы не зацепляют упор для большого пальца руки, и шприц не будет обнаружен. Система отображает предупредительное сообщение или издает звуковой сигнал, и предотвращает дальнейшее использование приводного блока. Предусмотрена возможность включение различных заданных размеров шприцов в конкретные конструкции, например, шприца объемом 10 см3 или шприца объемом 5 см3.
Признак автоматического обнаружения шприца также определяет объем текучей среды внутри шприца посредством оптического и/или механического датчика. Объем отображают на дисплее.
После завершения и подтверждения обнаружения шприца, система может автоматически промывать набор трубок соответствующим объемом текучей среды для полной зарядки одноразового элемента.
3. В предпочтительном примере реализации признак автоматической прочистки активизируют после выполнения признака автоматического обнаружения шприца. Указанная операция позволяет убедиться в том, что в приемник шприца установлен надлежащий шприц. Обеспечена возможность изменения глобальной установки, в результате которого автоматическая прочистка не выполняется, и в этом случае может быть использована опция ручной прочистки, доступная посредством сенсорного дисплея. Также может быть обеспечен вариант, в котором этап прочистки опущен. Процесс "автоматической прочистки" или "ручной прочистки" может быть опущен в случае, если набор одноразовых элементов шприца используют многократно для осуществления инъекции одному пациенту, и в этом случае набор трубок уже заряжен в результате выполненного первого цикла прочистки. См. фиг. 8А.
На правом краю сенсорного дисплея по фиг. 8С показан ряд сенсорных закладок, доступ к которым может быть получен в любой момент во время работы.
1 - Экран "Пациент": Позволяет вводить данные о пациенте или лечащем враче.
2 - Экран "Обнаружение": Активный экран инъекции, на котором показано визуальное отображение расхода и давления текучей среды в течение процесса осуществления инъекции, позволяющих оператору обнаружить цель. На экране также показаны значения Р1 и Р2.
3 - Экран "Установки": Позволяет изменять значения расхода и давления, значение Р1 и значение Р2 давления. Может быть выбрана яркость экрана и громкость звука. Дополнительные установки включают "Калибровку Экрана" (регулировка чувствительности сенсорного дисплея), установку даты и времени и установку "Автоматическая прочистка Вкл/Выкл".
4 - Экран "Данные": Обеспечивает возможность обзора, электронной передачи и печати данных, собранных во время предыдущих операций по обнаружению пространства для осуществления инъекции.
Доступ к экрану пациента получают путем нажатия на закладку "Пациент" на правой стороне экрана. Следует отметить, что оператор может переключаться между любыми из экранов во время работы посредством простого нажатия на закладку на правой стороне экрана.
При нажатии на закладку "Пациент" система отображает экран (показанный на фиг. 8С), на котором оператор может вводить данные о пациенте и враче, которые будут сохранены с отметкой даты и времени для пациента. См. фиг. 8С и фиг. 8D.
Согласно фиг. 8Е, экран установок отображает следующие установки, которые может регулировать пользователь.
1. "Яркость" позволяет увеличивать или уменьшать яркость экрана. После совершения выбора указанное значение воспроизводится в дальнейшем по умолчанию.
2. Корректировка громкости звука для регулировки громкости звука во время работы.
3. Калибровка экрана позволяет регулировать чувствительность сенсорного дисплея для удобства операторов, использующих защитную пленку и/или работающих в перчатках.
4. Установка даты и времени для регулировки даты и времени.
5. Значение расхода для регулировки выбранной скорости.
6. Граница давления - значение Р1. Значение Р1 представляет собой давление, при котором поток текучей среды прекращается, но результаты измерений давления по-прежнему записываются, отображаются и озвучиваются.
7. Граница давления - Старт - значение Р1. Значение Р2 представляет собой давление, при достижении которого поток текучей среды возобновляется.
В предпочтительном примере реализации значение Р1 и значение Р2 различны. Значение Р2 должно быть меньше значения Р2, что позволяет обеспечить давление (значение Р1), при котором поток текучей среды прекращается после достижения первоначальной границы значения давления. Поток текучей среды возобновляется при определении давлением второго, более низкого значения давления, заданного в виде значения Р2.
Тем не менее возможен вариант, в котором значение Р2 может также быть выше значения Р1, и в этом случае поток текучей среды возобновляется лишь при увеличении давления до значения новой границы давления. Оператор может выбрать одинаковое значение Р1 и Р2.
На фиг. 8F показан экран с данными, отображающий данные о пациенте и данные о враче, и сохраняющий запись местоположения и событии инъекции. Указанные данные могут быть сохранены на съемном носителе и/или непосредственно распечатаны на принтере с приводного блока.
Экран обнаружения обеспечивает чрезвычайно важную информацию во время процесса обнаружения и осуществления инъекции при проведении процедуры, и показан на фиг. 8G.
На чертеже показан активный экран режима "Обнаружение", рассматриваемый во время работы. Непосредственно с указанного экрана может быть осуществлен доступ к нижеследующим функциям сенсорного дисплея.
1. Кнопка "Старт"/"Стоп" для запуска потока и остановки потока текучей среды вручную.
2. Функция "Пересчет давления": Позволяет системе вычесть неверный результат измерения давления вследствие несоответствий по высоте над уровнем моря или по высоте между пациентом или инструментом.
3. "Завершение лечения" переводит пользователя к окну прочистки для загрузки нового набора шприца для нового пациента или обеспечения использования второго шприца для первого пациента.
4. "Остаток объема" представлен в виде графического изображения шприца. По мере выведения текучей среды из шприца графическое изображение меняется, отражая изменение объема текучей среды в шприце.
5. "Давление" представлено в миллиметрах ртутного столба в реальном времени во время операции.
6. Используемый объемный расход.
7. График, отображающий результаты измерений давления в виде графика.
8. Слышимый звуковой сигнал, отражающий значения давления и потока текучей среды.
9. Значения P1, Р2 (если использовано) и Р3 (если использовано) представлены на графике на экране. Р2 отмечено как нижняя граница давления, представленная в виде выделенной цветом горизонтальной линии на графике.
10. "Печать" - оператор может распечатать данные и сопутствующий график с данного экрана.
11. На экране отображены время и дата.
12. Бегущий график - занимает большую часть экрана и представляет собой визуальное отображение записываемых данных о расходе и давлении. Эти данные выдаются пользователю в виде звукового оповещения или сигнала, в результате чего оператор не имеет необходимости постоянно смотреть на экран.
Клинический замысел прерывистого потока текучей среды со множеством отдельных значений границы давления
Важно установить отдельную первую верхнюю границу давления, заданную в виде первого выбранного давления Р1, для остановки потока текучей среды. Это позволяет ограничить объем вводимой текучей среды во время процесса определения наполненного текучей средой пространства в ткани. Указанный признак является преимуществом относительно уровня техники вследствие того, что он позволяет предотвратить непрерывный поток текучей среды в ткани, который может привести к нежелательным последствиям.
Для обнаружения наполненного текучей средой анатомического пространства, такого как эпидуральное пространство или межсуставное пространство, в уровне техники была использована система с непрерывным потоком текучей среды: в патентах, выданных Тимо Лехнеру (Timo Lechner) (патент США №7,922,689) и Тиму Патрику (Tim Patrick) (патент США №8,002,736). При использовании указанных инструментов оператор должен вводить текучую среду в ткани на непрерывной основе для определения тканей на основании давления. Недостаток указанных патентов заключается в необходимости непрерывного потока текучей среды во время непрерывного процесса определения давления и идентификации анатомического участка или структуры. Непрерывный поток текучей среды способен: 1) вызвать повреждение тканей в результате оказания чрезмерного давления на ткани; 2) повысить давление в ткани, что приводит к возникновению ошибочного фактора и ошибок при измерении давления в тканях, результатом чего является неудачное выполнение необходимого действия; 3) вызвать чрезмерные болевые ощущения во время операции и после операции; 4) при чрезмерном использовании лекарственных средств и текучих сред в ткани, могут возникать нежелательные реакции пациентов на указанные средства. Соответственно, система, в которой использована система прерывистого потока текучей среды, выполненная с возможностью обратной связи и передачи данных о давлении в реальном времени, отлична от известных из уровня техники изобретений.
Возможность установки множества заданных значений давления, отличных от Р1, обеспечивает средства обнаружения цели с низким давлением на анатомическом участке без введения дополнительной текучей среды. В указанном процессе поток текучей среды используют в качестве параметра обнаружения для определения заданного анатомического участка в теле пациента. Настоящее изобретение позволяет выполнить устройство для обнаружения, использующее систему для текучей среды под давлением и с прерывистым потоком текучей среды на основании множества значений границы давления. Настоящее изобретение отлично от технологии CompuFlo, ранее представленной в патенте США №7,449,008, Хохман (Hochman).
Несмотря на то, что настоящее изобретение описано со ссылкой на множество конкретных примеров реализации, следует понимать, что указанные примеры реализации приведены исключительно в качестве иллюстрации принципов изобретения. Соответственно, описанные примеры реализации должны считаться приведенными исключительно в качестве примера, и не ограничивающими объем изобретения, заданный в нижеследующей формуле изобретения.
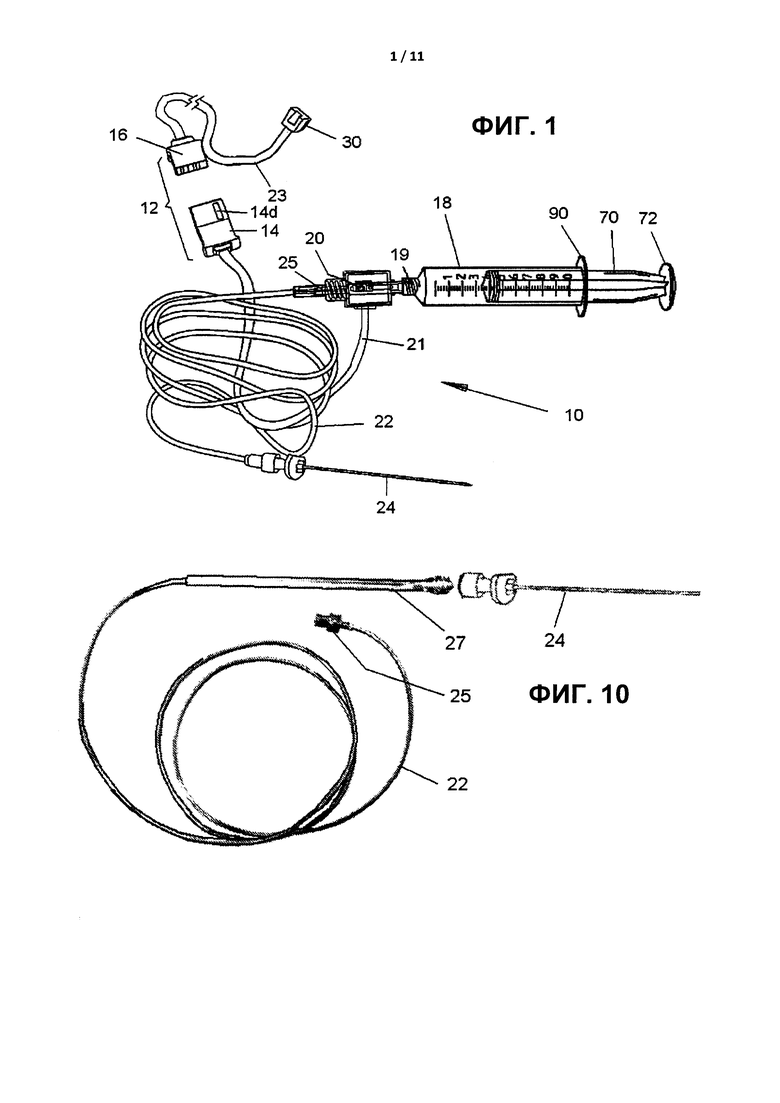
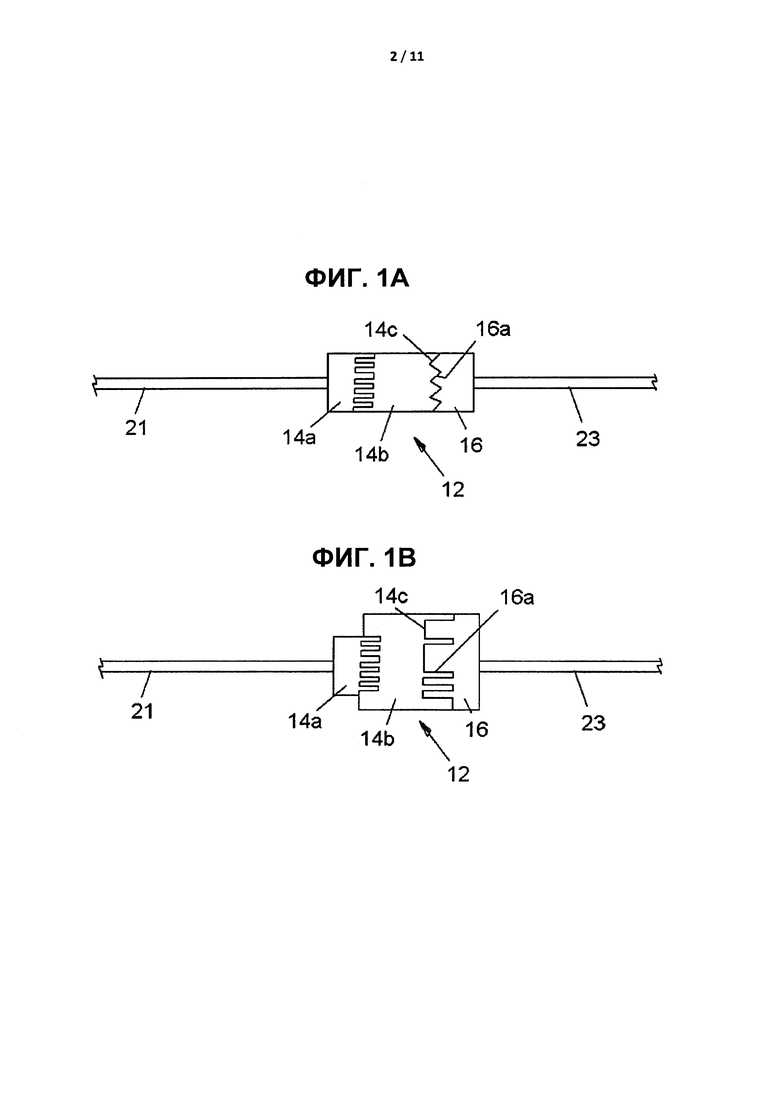
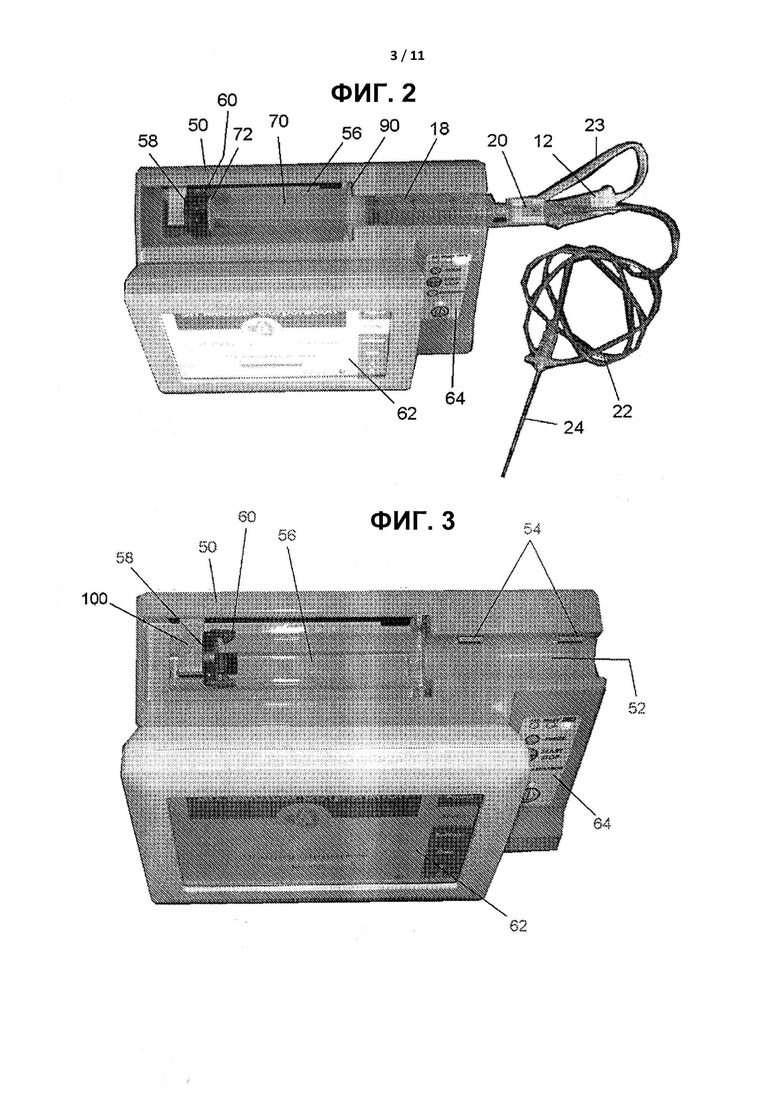
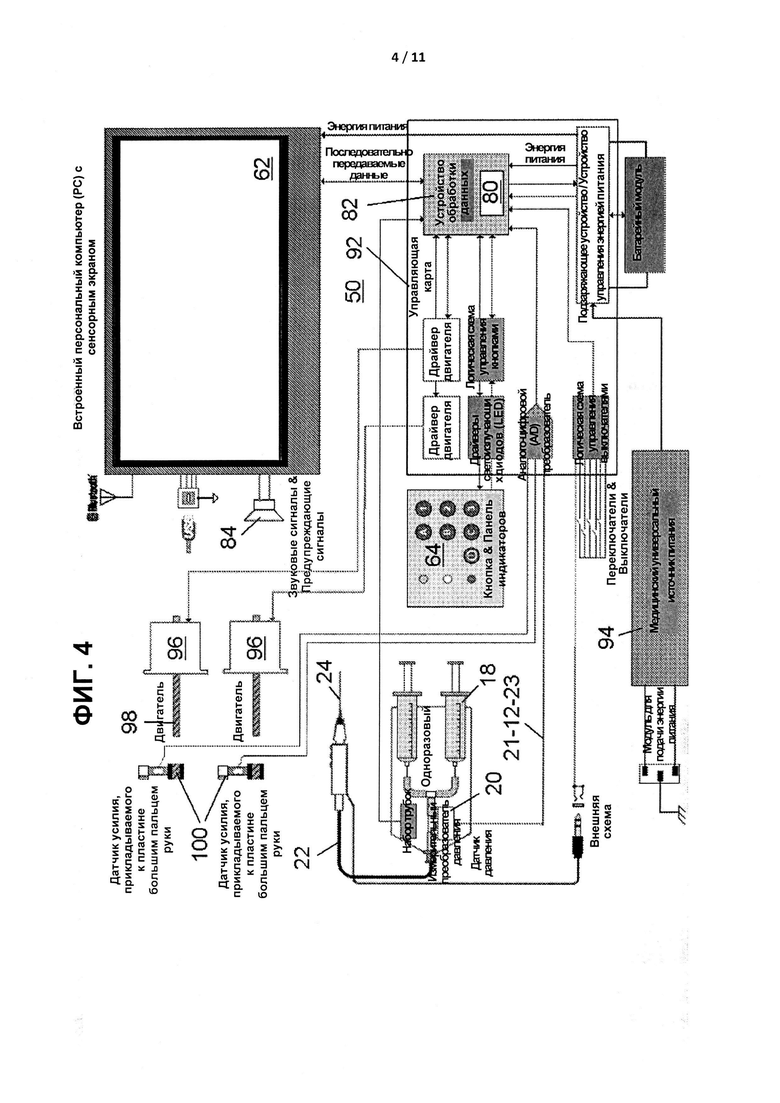
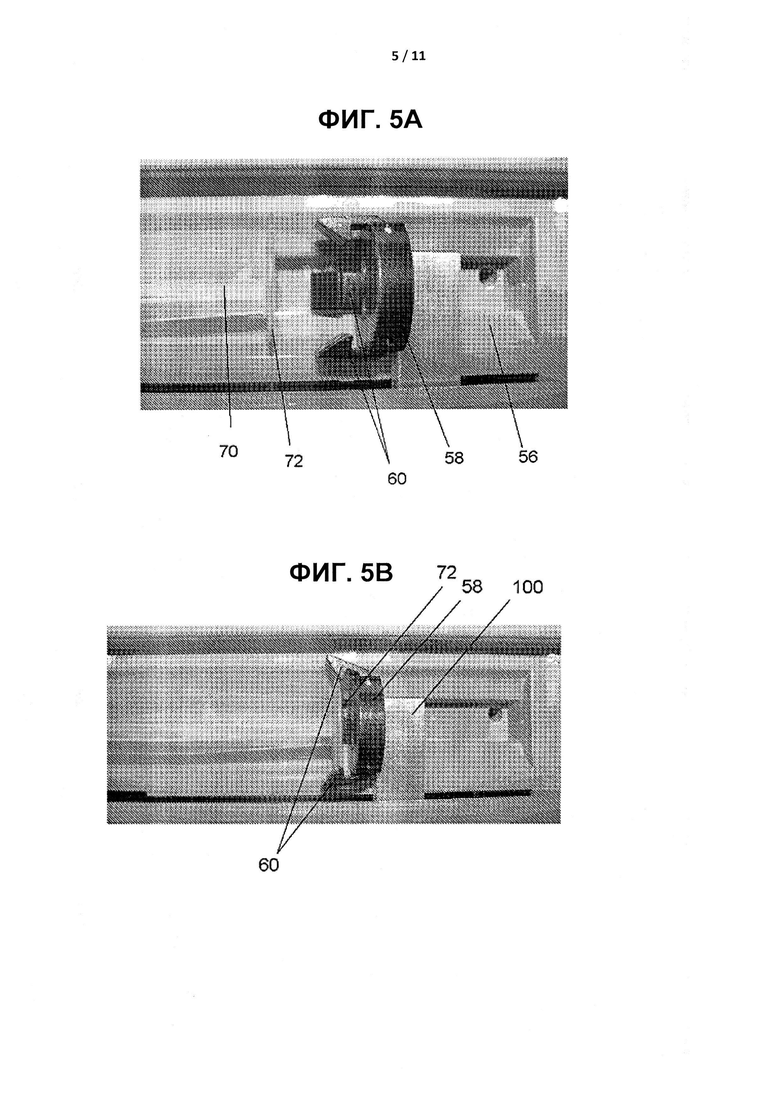
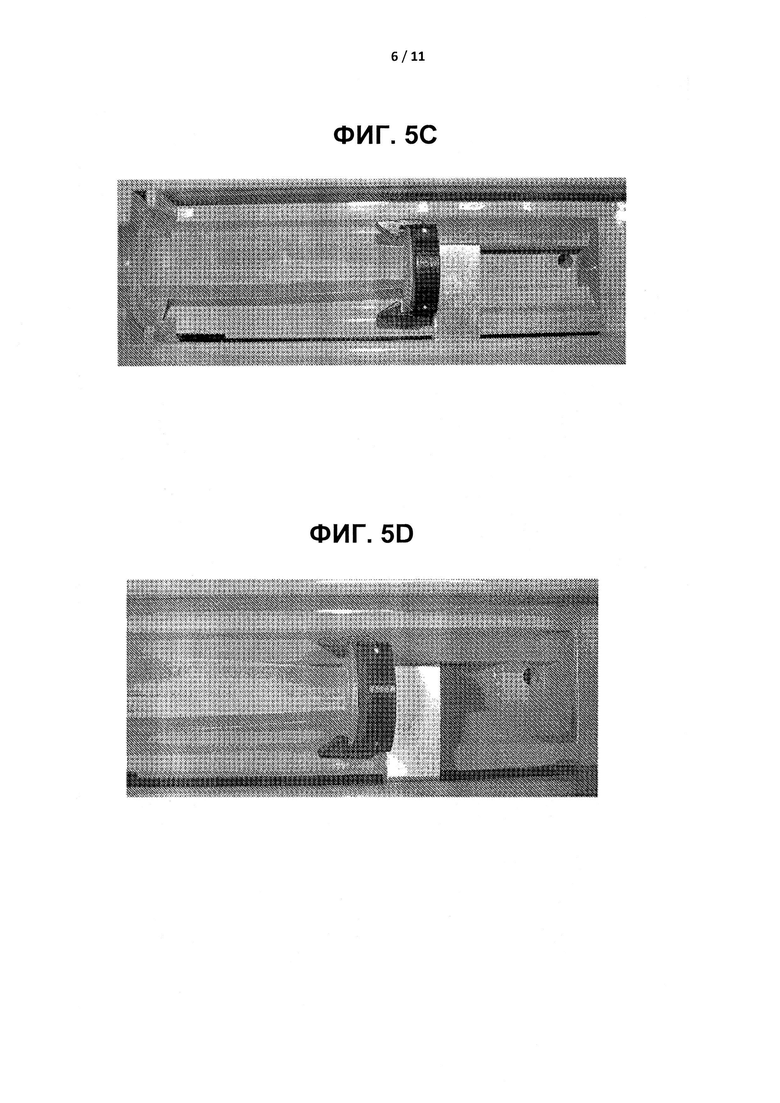
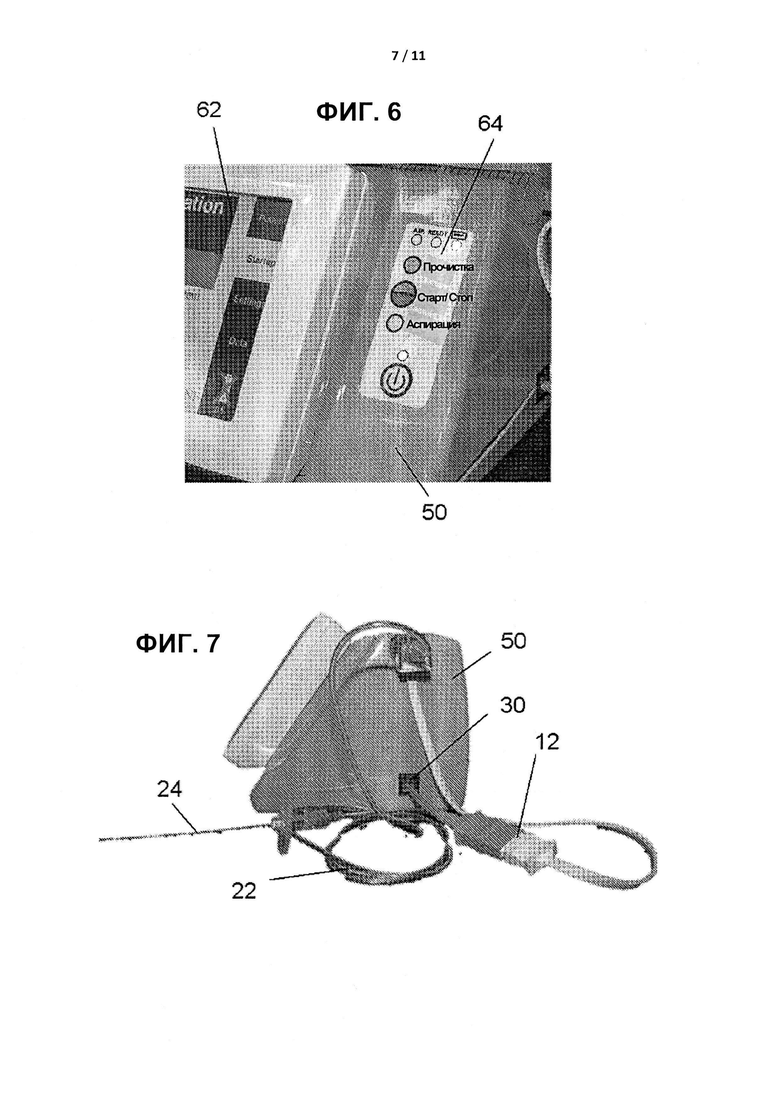
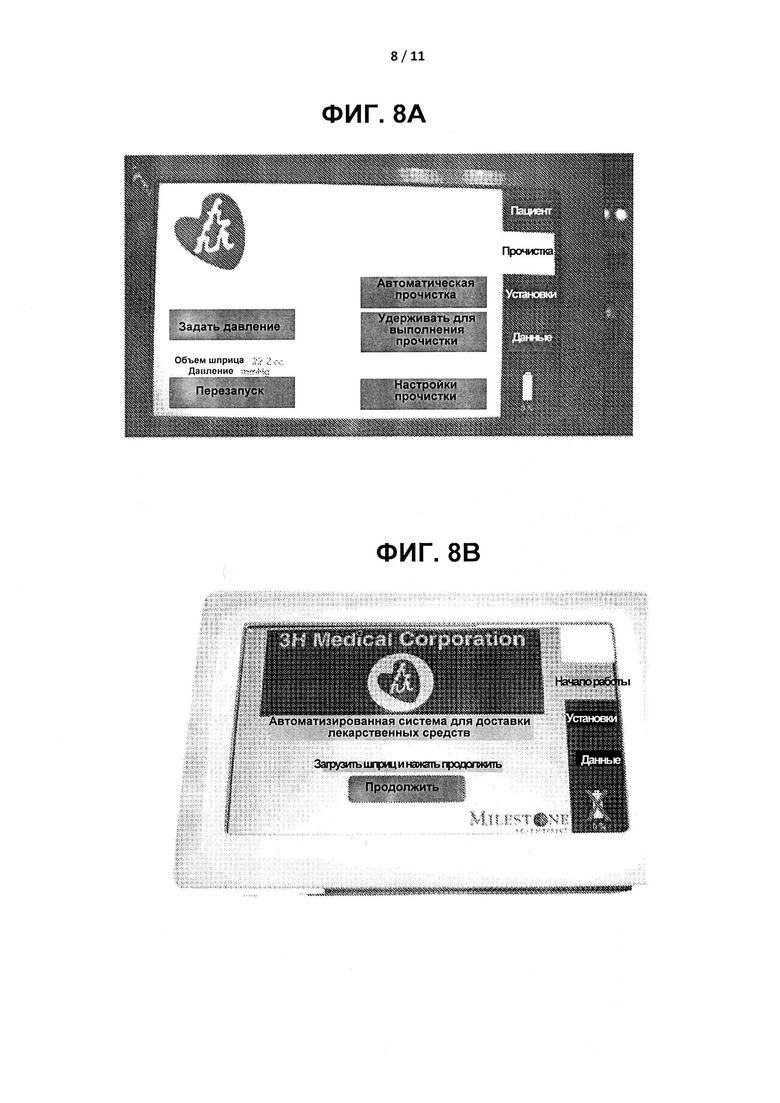
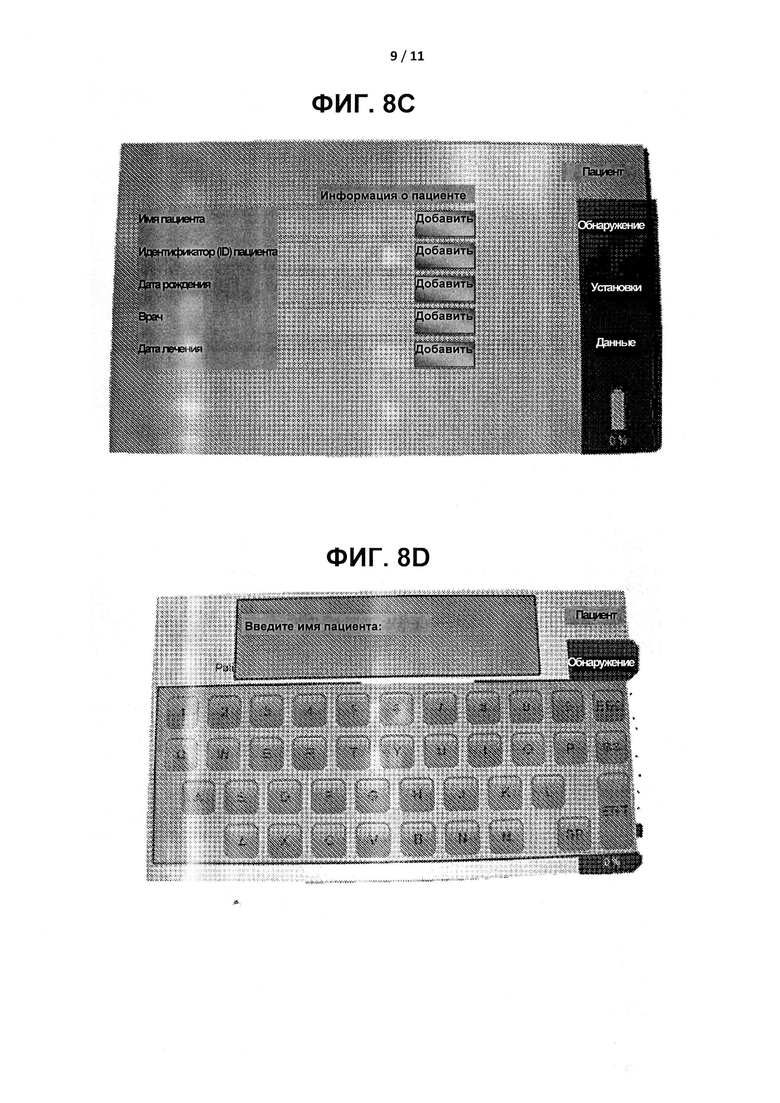
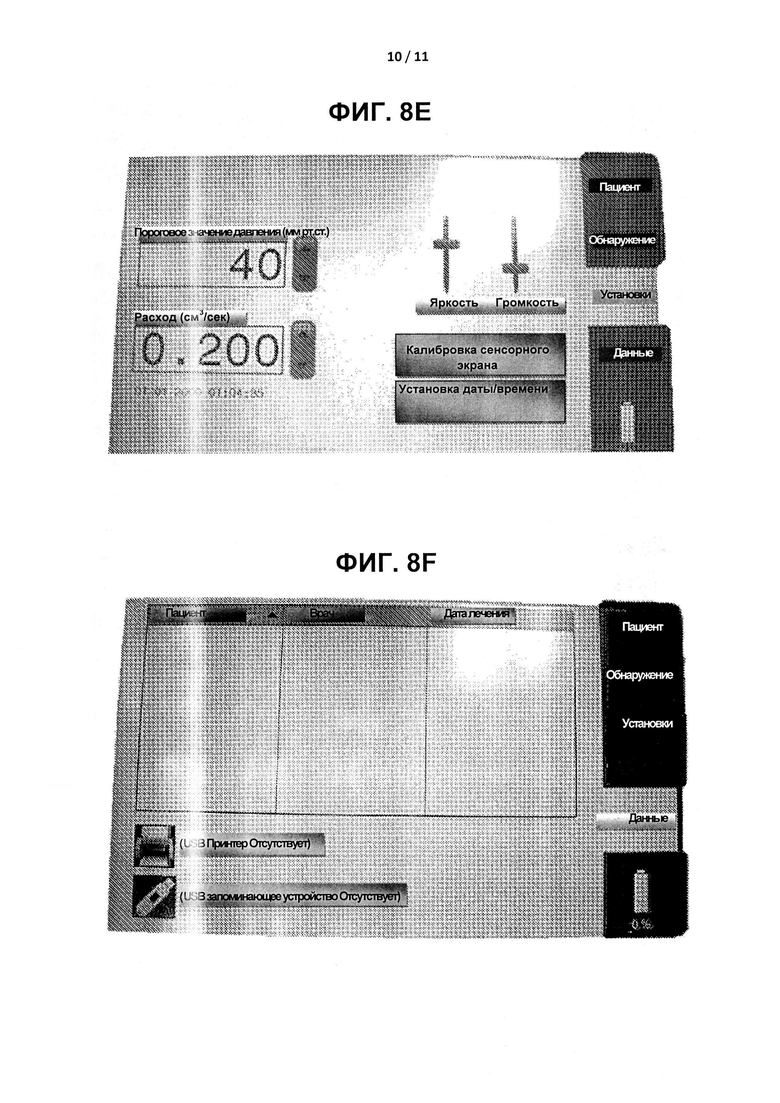
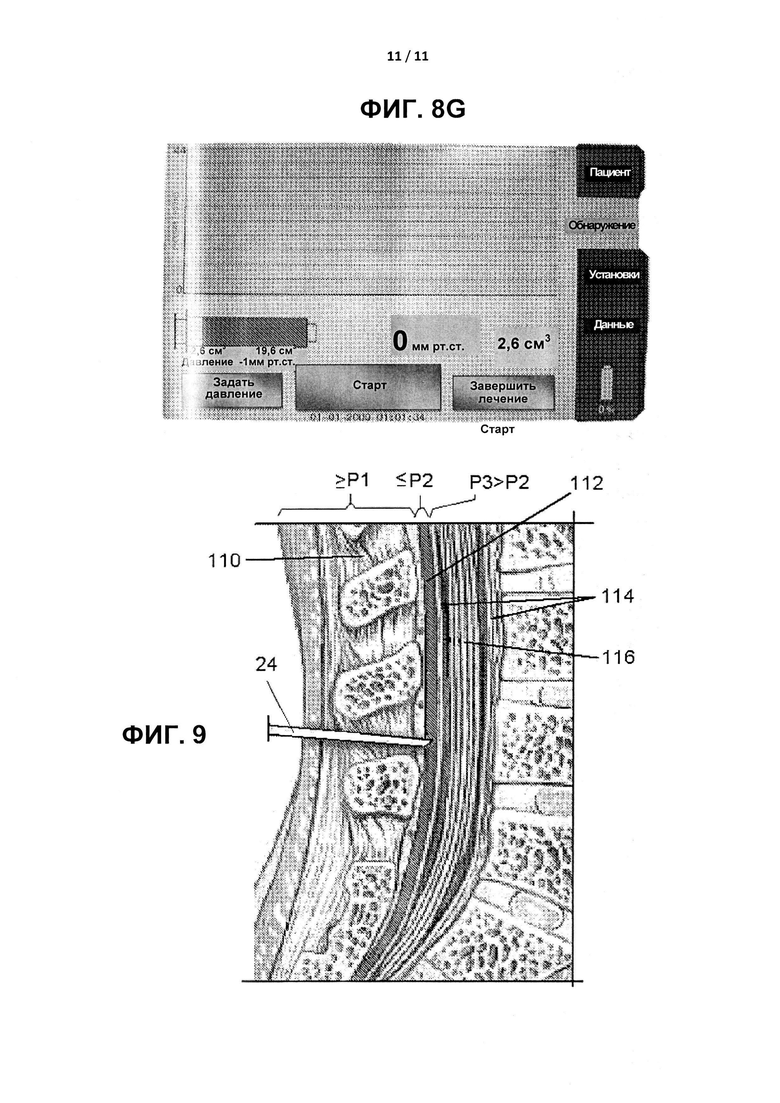
Изобретение относится к медицинской технике, а именно к аппаратам для введения текучей среды в наполненное текучей средой анатомическое пространство. Пространство может принимать текучую среду при давлении, которое меньше давления тканей. Аппарат содержит узел одноразовых элементов. Узел содержит шприц, имеющий основную часть для размещения текучей среды, предназначенной для ввода путем инъекции в анатомическое пространство. Шприц содержит поршень, выполненный с возможностью перемещения в одном конце основной части для дозированной подачи текучей среды из противоположного конца основной части. Узел включает трубки, неразъемно соединенные с противоположным концом основной части. Узел содержит иглу, соединенную с трубками и имеющую кончик, выполненный с возможностью вставки в пациента и перемещения через ткани, окружающие анатомическое пространство, для поиска этого анатомического пространства. Узел включает встроенный между противоположным концом основной части и одним концом трубок электронный измерительный преобразователь давления для создания сигнала, соответствующего мгновенному значению давления на кончике иглы. Аппарат содержит приводной блок, соединенный со шприцем и с электронным измерительным преобразователем давления. Блок содержит управляющее устройство с компьютером. Блок содержит запоминающее устройство для хранения первого выбранного давления (Р1), соответствующее инъекции текучей среды в анатомическое пространство. Блок включает двигатель, соединенный с компьютером и управляемый им. Блок содержит арматуру шприца, соединенную с двигателем и со шприцем для перемещения поршня в основную часть и из неё для инъекции и аспирации текучей среды из анатомического пространства. Компьютер запрограммирован с возможностью управления двигателем для перемещения поршня с обеспечением прерывистого потока текучей среды в пациента до тех пор, пока первое выбранное давление (Р1) не будет зарегистрировано электронным измерительным преобразователем давления. Двигатель прекращает работу для остановки потока дополнительной текучей среды в пациента до тех пор, пока мгновенное значение давления на кончике иглы не уменьшится до значения, которое меньше первого выбранного давления. Программа возобновляет работу двигателя для возобновления потока текучей среды в пациента во время перемещения иглы в тканях пациента. Поток текучей среды в ткани прекращается при мгновенных значениях давления, превышающих первое выбранное давление (Р1), и возобновляется, когда мгновенное значение давления уменьшается до значения, которое меньше первого выбранного давления, для оповещения о нахождении кончика иглы в анатомическом пространстве, и для последующего возобновления инъекции текучей среды в указанное анатомическое пространство. Запоминающее устройство хранит второе выбранное давление (Р2), значение которого меньше значения первого выбранного давления (Р1) на первую выбранную величину. Компьютер запрограммирован с возможностью возобновления работы двигателя для возобновления перемещения поршня с обеспечением возобновления потока текучей среды к кончику иглы, когда мгновенное значение давления меньше значения первого выбранного давления (Р1) на первую выбранную величину. Техническим результатом является повышение надежности и безопасности выполнения эпидуральной инъекции путем ограничения объема текучей среды для определения эпидурального пространства. 16 з.п. ф-лы, 10 ил.
1. Аппарат для введения текучей среды в наполненное текучей средой анатомическое пространство, выполненное с возможностью приема текучей среды при давлении, которое меньше давления тканей, окружающих анатомическое пространство, содержащий:
- узел одноразовых элементов, содержащий:
шприц, имеющий основную часть для размещения текучей среды, предназначенной для ввода путем инъекции в анатомическое пространство, и содержащий поршень, выполненный с возможностью перемещения в одном конце основной части для дозированной подачи текучей среды из противоположного конца основной части,
трубки, неразъемно соединенные с противоположным концом основной части,
иглу, соединенную с трубками и имеющую кончик, выполненный с возможностью вставки в пациента и с возможностью перемещения через ткани, окружающие анатомическое пространство, для поиска этого анатомического пространства, и
встроенный электронный измерительный преобразователь давления для создания сигнала, соответствующего мгновенному значению давления на кончике иглы, подсоединенный между противоположным концом основной части и одним концом трубок,
- приводной блок, механически соединенный со шприцем и электрически соединенный с электронным измерительным преобразователем давления, причем приводной блок содержит
управляющее устройство с компьютером,
запоминающее устройство для хранения первого выбранного давления (Р1), которое выбрано таким образом, что оно соответствует инъекции текучей среды в наполненное текучей средой анатомическое пространство,
двигатель, соединенный с компьютером и управляемый им, и
арматуру шприца, соединенную с двигателем и механически соединенную со шприцем для перемещения поршня в основную часть и из неё соответственно для инъекции и аспирации текучей среды на кончике иглы с обеспечением инъекции текучей среды в пациента и аспирации текучей среды из пациента, и
- причем компьютер запрограммирован с возможностью управления двигателем для перемещения поршня с обеспечением прерывистого потока текучей среды в пациента до тех пор, пока первое выбранное давление (Р1) не будет зарегистрировано электронным измерительным преобразователем давления, после чего двигатель прекращает работу для остановки потока дополнительной текучей среды в пациента до тех пор, пока мгновенное значение давления на кончике иглы не уменьшится до значения, которое меньше первого выбранного давления, после чего программа возобновляет работу двигателя для возобновления потока текучей среды в пациента, так что по мере перемещения иглы в тканях пациента, окружающих наполненное текучей средой анатомическое пространство, поток текучей среды в ткани прекращается при мгновенных значениях давления, превышающих первое выбранное давление (Р1), и возобновляется, когда мгновенное значение давления уменьшается до значения, которое меньше первого выбранного давления, для оповещения о нахождении кончика иглы в анатомическом пространстве и для последующего возобновления инъекции текучей среды в указанное анатомическое пространство;
при этом запоминающее устройство хранит второе выбранное давление (Р2), значение которого меньше значения первого выбранного давления (Р1) на первую выбранную величину, а
компьютер запрограммирован с возможностью возобновления работы двигателя для возобновления перемещения поршня с обеспечением возобновления потока текучей среды к кончику иглы, когда мгновенное значение давления меньше значения первого выбранного давления (Р1) на первую выбранную величину.
2. Аппарат по п. 1,
в котором запоминающее устройство также хранит третье выбранное давление (Р3), значение которого меньше значения первого выбранного давления (Р1) и больше значения второго выбранного давления (Р2), а
компьютер запрограммирован с возможностью повторной остановки работы двигателя для остановки перемещения поршня с обеспечением повторной остановки потока текучей среды к кончику иглы, когда мгновенное значение давления достигает значения третьего выбранного давления (Р3) после достижения им значения второго выбранного давления (Р2).
3. Аппарат по п. 1, в котором управляющее устройство содержит средства ввода для получения по меньшей мере одного параметра, включая по меньшей мере первое выбранное давление (Р1).
4. Аппарат по п. 2, в котором управляющее устройство содержит средства ввода для получения множества параметров, содержащих по меньшей мере одно из первого, второго и третьего выбранных давлений (Р1, Р2, Р3).
5. Аппарат по п. 1, в котором первое выбранное давление (Р1) составляет от примерно 25 мм рт.ст. до примерно 300 мм рт.ст.
6. Аппарат по п. 1, в котором второе выбранное давление (Р2) составляет от примерно 25 мм рт.ст. до примерно 100 мм рт.ст.
7. Аппарат по п. 2, в котором
третье выбранное давление (Р3) составляет от примерно 80 мм рт.ст. до примерно 180 мм рт.ст. в зависимости от анатомического пространства,
первое выбранное давление (Р1) составляет от примерно 80 мм рт.ст. до примерно 300 мм рт.ст. в зависимости от анатомического пространства, а
второе выбранное давление (Р2) составляет от примерно 20 мм рт.ст. до примерно 100 мм рт.ст. в зависимости от анатомического пространства.
8. Аппарат по п. 3, в котором указанный по меньшей мере один параметр выбран из группы, состоящей из: длины инъекционных трубок, внутреннего диаметра инъекционных трубок, вязкости текучей среды для инъекции, состава текучей среды для инъекции и температуры текучей среды для инъекции.
9. Аппарат по п. 1, в котором электронный измерительный преобразователь давления встроен с неразъемным соединением.
10. Аппарат по п. 1, в котором приводной блок содержит корпус с полостью для шприца для удерживания основной части шприца в зафиксированном осевом положении на корпусе и с возможностью удаления из корпуса и выемку для поршня, причем
поршень выполнен с возможностью свободного перемещения,
арматура шприца содержит платформу, выполненную с возможностью перемещения вдоль выемки для поршня,
поршень содержит упор для большого пальца руки,
платформа содержит по меньшей мере один установленный с возможностью поворота пружинный зацеп для взаимодействия с упором для большого пальца руки, когда платформа перемещена для взаимодействия с упором для большого пальца руки, с обеспечением осевого соединения платформы с упором для большого пальца руки таким образом, что перемещение платформы в противоположных направлениях обеспечивает перемещение поршня в противоположных направлениях,
арматура шприца содержит датчик для измерения величины перемещения платформы для взаимодействия с упором для большого пальца руки, а
компьютер запрограммирован с возможностью остановки перемещения платформы под воздействием датчика, когда платформа приведена во взаимодействие с упором для большого пальца руки.
11. Аппарат по п. 1, содержащий специальный соединитель, электрически и механически подсоединенный между электронным измерительным преобразователем давления и управляющим устройством для обеспечения работы управляющего устройства только в случае, если авторизованный узел одноразовых элементов соединен с электронным измерительным преобразователем давления.
12. Аппарат по п. 1, в котором кончик иглы выполнен с возможностью введения в одно из следующего: пространство в эпидуральной ткани, межсуставное пространство, внутриглазная жидкость глазного яблока, сосуд тела и пространство в ткани, состоящее в основном из биологических текучих сред.
13. Аппарат по п. 12, в котором игла представляет собой иглу катетера.
14. Аппарат по п. 1, в котором текучая среда для инъекции содержит лекарственные средства.
15. Аппарат по п. 1, дополнительно содержащий визуальный сигнал, управляемый управляющим устройством и указывающий на каждый запуск или остановку потока текучей среды.
16. Аппарат по п. 1, дополнительно содержащий генератор звукового сигнала, управляемый управляющим устройством и создающий звуковое оповещение при каждом пуске или остановке потока текучей среды.
17. Аппарат по п. 1, в котором узел одноразовых элементов содержит жесткую удлиненную рукоятку, неразъемно соединенную с трубками для обеспечения соединения с иглой, причем рукоятка имеет длину от примерно 10 до 20 см.
| US20060122555 A1, 08.06.2006 | |||
| US20110298628 A1, 08.12.2011 | |||
| УПРАВЛЯЕМАЯ КОМПЬЮТЕРОМ СИСТЕМА ДЛЯ ДОСТАВКИ ЛЕКАРСТВА С ИЗМЕРЕНИЕМ ДИНАМИЧЕСКОГО ДАВЛЕНИЯ | 2007 |
|
RU2437683C2 |
| US5651775 A, 29.07.1997 | |||
| US2003109871 A1, 12.06.2003. | |||

