ПРИТЯЗАНИЕ НА ПРИОРИТЕТ
[001] Настоящая заявка является частичным продолжением заявки на патент США №15/062,685, поданной 7 марта 2016, и заявки на патент США №15/141,231, поданной 28 апреля 2016. Настоящая заявка также испрашивает приоритет по предварительной заявке на патент США №62/242,745, поданной 16 октября 2015. Раскрытия каждой из приведенных выше заявок на патент, таким образом, полностью включены в настоящий документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[002] Настоящее изобретение относится в целом к усовершенствованиям доставки лекарственных средств и, в частности, к системам для подкожной инъекции/аспирации в тело пациента. Более конкретно, настоящее изобретение обеспечивает способ и устройство для выполнения инъекции, которые обеспечивают врачу обратную связь во время подкожного расположения иглы.
УРОВЕНЬ ТЕХНИКИ
[003] В различных медицинских процедурах желательным является 4расположение иглы в определенной области для введения раствора лекарственного средства, такого как анестезирующее или анальгезирующее средство. Двумя такими примерами являются регионарная анестезия путем блокады эпидурального тканевого пространства и блокады периферического нерва (PNB). В отношении эпидуральной анестезии, для достижения эффективной регионарной анестезии и блокады нервной передачи в центральную нервную систему соответствующий объем раствора для местной анестезии должен быть введен в непосредственной близости к спинному мозгу на определенном уровне позвоночного столба в пределах анатомического участка, известного как эпидуральное "пространство". Для блокады периферического нерва идентифицируется целевой нерв, и игла размещается в непосредственной близости для доставки к нерву анестезирующего средства. Каждая из этих процедур имеет сложности, относящиеся к релевантной анатомии.
[004] Эпидуральным пространством называется часть позвоночного канала, не занятого твердой мозговой оболочкой и ее содержимым. Оно пролегает между твердой мозговой оболочкой и надкостницей, покрывающей с внутренней стороны позвоночный канал. Эпидуральное пространство проходит от большого затылочного отверстия до крестцовой щели. Передние и задние корешки нервов, покрытые оболочкой, проходят через эпидуральное пространство и объединяются между телами позвонков и межпозвоночными дисками. Эпидуральное пространство с латеральной стороны ограничено надкостницей ножек дуг позвонков и межпозвоночными отверстиями. Эпидуральное пространство сзади ограничивается структурами, такими как надкостница передней поверхности пластинок, суставные отростки и их соединительные связки, надкостница основания остистых отростков, и пространства между пластинками, заполненные желтой связкой. Указанное пространство содержит венозные сплетения и жировую ткань, непрерывно связанную с жировой тканью в околопозвоночном пространстве.
[005] Заполненное текучей средой эпидуральное пространство заднее эпидуральное пространство) представляет собой ограниченный анатомический участок неправильной формы площадью в несколько квадратных миллиметров относительно поперечного сечения позвонков и позвоночника. Указанное заполненное текучей средой пространство является крайне узким и расположено в непосредственной близости от оболочки позвоночного столба, причем желтая связка расположена в непосредственной близости от него. Таким образом, во время введения эпидуральной иглы желательно знать, когда кончик эпидуральной иглы входит в заполненное текучей средой пространство после прокалывания желтой связки. Если продолжать продвижение иглы после входа ее кончика в указанное заполненное текучей средой пространство, игла может проткнуть твердую мозговую оболочку.
[006] Лечащий врач пальпирует позвоночный столб на соответствующем уровне между позвонками. Местную анестезию выполняют через поверхностные ткани, что приводит к их местному обезболиванию. Затем дерму прокалывают с использованием иглы Туохи и продвигают иглу, в то время как врач одновременно давит на поршень шприца. Оказываемое на поршень давление непреднамеренно приводит к непрерывному выходу объема текучей среды из иглы внутрь тканей.
[007] К сожалению, при неправильном проведении эпидуральной процедуры или если внимание врача отвлечено во время выполнения этой процедуры, игла может быть продвинута за намеченное целевое пространство и может повредить спинной мозг. Известно, что от 2% до 3% всех инъекций выполняются с выходом за пределы намеченного целевого пространства и проникают сквозь твердую мозговую оболочку вплоть до прямого контакта иглы с пространством, в котором находится цереброспинальная жидкость, а в некоторых случаях до прямого контакта со спинным мозгом, что может привести к жизнеугрожающей ситуации. Таким образом, точное и тщательное визуальное внимание врача должно поддерживаться в течение всей процедуры для наблюдения за точным местоположением иглы при ее введении в эпидуральное пространство.
[008] Кроме того, при перемещении иглы Туохи после определения точного местонахождения эпидурального пространства игла может быть случайно выведена за пределы эпидурального тканевого пространства при удалении шприца или вследствие случайного движения пациента или руки врача или в худшем случае продвинута в твердую оболочку спинного мозга, в результате чего возникает так называемое "мокрое касание", которое может иметь опасные долгосрочные последствия для здоровья пациента. Даже если первоначально точное местонахождение эпидурального пространства было определено должным образом, при дальнейшем продвижении иглы во время введения анестезирующего раствора в спинной мозг может быть введена большая доза анестезирующего раствора, что приводит к временному или необратимому повреждению нервов.
[009] В дополнение к описанным выше недостаткам, мониторинг давления может быть осложнен перемещением вперед иглы в ткани во время проникновения в них. При продвижении иглы в тканях в соответствии с третьим законом Ньютона генерируется давление, противодействующее напорному давлению. Напорному давлению текучей среды, выпускаемой из кончика иглы, противодействует встречная сила, создаваемая при продвижении иглы через ткани. Эта противодействующая встречная сила вносит погрешность в измерение давления на выходе, в частности, если мониторинг давления проводится на непрерывной основе в режиме реального времени во время продвижения и инъекции лекарственного средства в ткань. Неоднородное перемещение при продвижении иглы в массив ткани вызывает скачки давления, при этом погрешности в результатах измерений давления могут привести к ложноположительному подтверждению максимального давления на выходе.
[0010] Ниже со ссылкой на ФИГ. 12 описана гистология периферической нервной системы. Основным элементарным звеном центральной и периферической нервных систем является одиночная клеточная единица, обычно известная как аксон. Головной мозг и центральная нервная система состоят из миллионов аксонов. Ответвления от центральной нервной системы ствола головного мозга и спинного мозга представляют собой совокупность высокоорганизованных аксонов, посредством которых образуется сеть чувствительных и двигательных путей. Вся вместе эта сеть путей известна как периферическая нервная система.
[0011] В периферической нервной системе каждый отдельный аксон окружен поддерживающей соединительной тканью, называемой эндоневрием. В пределах эндоневрия содержатся небольшие кровеносные сосуды (капилляры и венулы), доставляющие питательные вещества к указанным аксонам. Аксоны все вместе образуют высоко организованные плотно упакованные волокна, которые окружены тонкой, но плотной многослойной оболочкой соединительной ткани, которая окружает указанные волокна и образует мембранную структуру, называемую периневрием. Периневрий обеспечивает плотный защитный слой, который является физическим и химическим барьером, обеспечивающим достаточную степень защиты для аксонов и эндоневрия. Этот барьер является родственным гематоэнцефалическому барьеру.
[0012] Это отдельное образование эндоневрия и периневрия называют периферическим нервным волокном. Когда нервные волокна объединяются вместе, они формируют фасцикулярные пучки, покрытые эпиневрием, который является соединительной тканью, иногда называемой внутренним эпиневрием. Множество групп пучков нервов находятся в неоднородном матриксе соединительной ткани (фиброзно-жировой ткани), в котором имеются сосуды среднего размера, которые свободно расположены вместе с наружной плотной соединительной тканью. Пучковые фасцикулярные структуры, окруженные этим дополнительным плотно и весьма высокоорганизованным слоем фиброзной ткани, называемым наружным эпиневрием, представляют собой периферические нервы.
[0013] Наружный эпиневрий, являясь наружным слоем, контактирует с соседними структурами. Рыхлая соединительная ткань заполняет пространство между нервом и окружающей тканью в соединении с наружным эпиневрием. Таким образом, имеется дополнительная многослойная граница за пределами наружного эпиневрия, которая проходит вдоль всей длины нерва и состоит из экстраневральной соединительной ткани, известной как параневрий. Лараневрий представляет собой различимую многослойную функциональную структуру, которая обеспечивает возможность скольжения нерва относительно других анатомических структур во время мышечно-скелетных движений.
[0014] В 1912 году для облегчения определения местонахождения ветви нерва была предложена электростимуляция. Электрическая стимуляция нерва была введена исходя из понимания того, что нервная передача представляет собой электрохимическую реакцию возбуждения, передающуюся вдоль нерва (аксона). Применение стимуляции тела электрическим током позволяло выявить косвенное возбуждение как чувствительных волокон, так и двигательных волокон нерва. Выяснилось, что при применении электростимуляции возникает видимое мышечное сокращение. При модулировании частоты и интенсивности разряда наблюдались сокращения и расслабления групп мышц, иннервированных ветвью нерва. Такое применение непрямого электрического разряда для вызова реакции конкретного нерва не получило распространения, поскольку лечащие врачи не обладали способностью точно управлять различными параметрами приложенного тока. Недостатки, известные еще со времен первой стимуляции нерва, существуют и поныне и включают в себя:
- Невозможность точного модулирования электрического разряда при данных расстояниях, приложенного к поверхности в проекции ветви нерва, ограничивает преимущества стимуляции нерва при идентификации конкретной ветви нерва, когда стимуляцию нерва используют в качестве основного средства определения местоположения ветви нерва. Для конкретных расстояний при приближении к ветви нерва вслепую рекомендуются различные интенсивности разряда в диапазоне от 2,0 мА до 0,2 мА. Однако корреляция между расстоянием и интенсивностью, определенной по видимой реакции в форме сокращения мышцы, отсутствует. Таким образом, более интенсивная стимуляция, вызывающая видимую реакцию, не обязательно означает, что игла находится на большем расстоянии от намеченной ветви нерва. И видимая реакция на менее интенсивный электрический разряд не означает, что игла находится в положении ближе к поверхностному экстраневральному и/или находится в пределах нерва, т.е. достигла внутриневрального положения. Действительно, по-видимому, не существует единодушного мнения относительно местонахождения иглы (внутриневрального или экстраневрального), определенного на основании реакции на электрический разряд независимо от его интенсивности, частоты и продолжительности, приложенный к нерву на данном расстоянии.
- Еще один недостаток способа стимуляции нерва состоит в невозможности задания соответствующего разряда для определенного расстояния от наружной поверхности нервного пучка, т.е. при экстрафасцикулярном положении. Ситуация еще более усугубляется, если используется интенсивный разряд более 1,0 мА в интрафасцикулярном положении, поскольку он может вызвать у пациента тяжелую реакцию или, еще хуже, результатом станет необратимое повреждение из-за чрезмерного электрического разряда, примененного непосредственно к аксону. Таким образом, невозможно определить, какой соответствующий разряд должен быть применен для конкретного расстояния от нервного пучка.
- Еще один недостаток состоит в том, что искажающие факторы не позволяют считать стимуляцию нерва точным способом. Эти факторы относятся к анатомическим вариациям у конкретного данного пациента, а также анатомическим вариациям между различными пациентами. Организм состоит из тканей различных типов, которые включают в себя соединительную ткань из минерализованной и неминерализованной тканей. Эти ткани состоят из воды и коллагена, жировой ткани (жира), мышечной ткани, текучих сред (крови), костей, хрящей и т.п. Ткани каждого из этих типов имеют различное электрическое сопротивление и/или зарядную емкость, когда разряд применяют к намеченной цели на данном расстоянии. Вариативность ткани нельзя недооценивать и невозможно предугадать. Следовательно, известные устройства имеют недостаток, состоящий в неспособности количественно определять интенсивность конкретного разряда для конкретного местоположения. Это приводит к неспособности вызывать прогнозируемую реакцию на данный электрический разряд, когда он используется в качестве основного средства для определения местоположения или близости к конкретному нерву.
[0015] Суммируя вышесказанное, переменные, такие как интенсивность разряда, частота и электрическое сопротивление ткани не позволяют стандартизовать способ для обеспечения возможности определения местоположения конкретной ветви нерва.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0016] В свете недостатков уровня техники настоящее изобретение обеспечивает систему инъекции, которая повышает надежность и безопасность инъекций, в частности, инъекций, которые выполняются для идентификации заполненных текучей средой полостей в теле в узких слоях фасции или соединительной ткани. На основании информации, в частности, результатов непрерывного мониторинга давления, проецируемых на поверхность тела пациента в месте ввода иглы, оператор может тщательно и непрерывно отслеживать перемещение иглы с одновременным получением критических параметров инъекции, таких как давление на выходе, скорость потока, предупреждения, изменения порогового значения давления на выходе, а также любой важной информации, которая обычно показывается в другом месте. Такой подход обеспечивает возможность оператору всегда концентрировать визуальное внимание на участке инъекции.
[0017] Кроме того, согласно другому аспекту настоящего изобретения предложены устройство и способ, обеспечивающие механизм для оператора для непрерывного направления введения иглы с одновременным приемом визуальной информации, проецируемой на поверхность тела пациента на участке инъекции, и, таким образом, позволяющие оператору непрерывно держать в поле зрения иглу и участок инъекции для непрерывного поддерживания точной зрительно-моторной координации. Эта информация может быть предоставлена в различных формах от цветовых изменений, изображений, цифр, слов и визуальных изменений до таких форм, как интенсивность, мигание, координированные шаблоны освещения и т.п.
[0018] Согласно еще одному аспекту настоящего изобретения предложено устройство для ввода лекарственного средства, которое непрерывно отслеживает давление текучей среды, вводимой в тело субъекта. Затем измеряемое сопротивление давлению может непрерывно преобразовываться в визуальный сигнал. Затем результаты измерений представляются врачу-специалисту, чтобы он мог определить или подтвердить, доставляется ли вводимое лекарственное средство в заданную ткань. Кроме того, измерения также записываются для более позднего просмотра и документирования клинического случая. Верхние пороговые значения давления, а также управление скоростью ввода лекарственного средства могут быть предварительно заданы для исключения возможности использования избыточного давления и/или скорости ввода лекарственного средства во время этого процесса.
[0019] Согласно еще одному аспекту настоящего изобретения предложен способ и устройство для использования встречного давления при вычислении давления на выходе. Встречное давление зависит от скорости введения иглы. Таким образом, система содержит механизм для управления скоростью введения иглы. В частности, система может содержать метки на игле, а также слуховые или визуальные подсказки для предложения соответствующей скорости введения иглы.
[0020] Согласно еще одному аспекту настоящего изобретения предложен ручной блок, с которым соединена маркированная игла, выполненный с возможностью размещения в нем небольшого отображающего устройства, такого как светоизлучающий диод или дисплейный экран, которое воспроизводит мигание или визуальную инструкцию, и/или громкоговорителя, подающего звуковой сигнал или звуковой тон, который может быть прерывистым, для обеспечения координации заданного перемещения иглы вперед с указанными подаваемыми визуальным или звуковым сигналами в отношении продвижения иглы на основании указанных меток на поверхности иглы при ее проникновении через кожу или другую часть тела. Звуковая и визуальная модуляции определяют скорость продвижения иглы таким образом, что скорость продвижения иглы можно координировать с перемещением вперед для повышения точности определения возникающего встречного давления, используемого в вычислениях во время мониторинга давления на выходе в режиме реального времени.
[0021] Согласно одному аспекту настоящего изобретения предложен механизм для различения интрафасцикулярного и экстрафасцикулярного расположения иглы.
[0022] Согласно еще одному аспекту настоящего изобретения токовый разряд передается посредством ионного раствора через шприц одноразового применения и трубку к кончику иглы с целью стимуляции нерва.
[0023] Согласно еще одному аспекту настоящего изобретения предложена система, которая обеспечивает постоянный поток текучей среды из кончика иглы во время продвижения иглы через ткани при выполнении блокады периферического нерва, для предотвращения введения кончика иглы в нервный пучок. Постоянный поток текучей среды из кончика иглы действует в качестве средства для смещения или отталкивания плотных структур от кончика иглы при ее продвижении.
[0024] Согласно еще одному аспекту настоящего изобретения предложена система, которая обеспечивает определенную скорость или темп перемещения иглы вперед в ткани для предотвращения смещающей силы встречного давления, приложенной к игле, когда она продвигает указанную иглу в ткани и через них, с одновременным и непрерывным измерением давления в кончике иглы.
[0025] Согласно еще одному аспекту настоящего изобретения, когда игла не продвигается, встречное давление не вычитают из напорного давления при вычислении давления на выходе. Следует понимать, что кнопка или средство управления на ручном блоке также могут быть активированы для соответствия перемещениям вперед, при которых встречное давление вычитают из напорного давления при вычислении давления, и, таким образом, обеспечено средство для различения состояния, когда игла продвигается, и состояния, когда игла остается неподвижной в пределах ткани.
[0026] Согласно настоящему изобретению также предложен ручной блок, с которым соединена маркированная игла, и который предназначен для размещения в нем небольшого светоизлучающего диода или дисплейного экрана, и/или громкоговорителя, мигания и/или звуковой сигнал которых координированы с указанной скоростью продвижения указанной иглы. Согласно одному варианту реализации ручной блок содержит устройства ввода для управления скоростью введения лекарственного средства, электротоковой стимуляцией и связью с центральным процессором исполняющего блока. Кроме того, согласно одному варианту реализации ручной блок содержит вибрационный чип или элемент для обеспечения вибрации ручного блока для передачи команды или сигнала от центрального процессора оператору. Это ощущение вибрации может быть дискретным и может представлять командное предупреждение или сигнал для оператора, требующие его ответа. Согласно еще одному варианту реализации ручной блок также содержит выходное отображающее устройство для дополнительного отображения информации.
[0027] Согласно настоящему изобретению также обеспечено инъекционное устройство для проведения блокады периферического нерва, которое использует максимальный диапазон противодавления от 75 мм рт.ст. (10,0 КПа) до 500 мм рт.ст. (66,6 КПа) для запуска электростимуляции. Мгновенная дискретная подача тока может быть обеспечена при обнаружении конкретного значения давления в пределах диапазона давлений. Этот сигнал предназначен для управления мгновенной дискретной подачей тока при конкретном значении давления в пределах установленного диапазона давлений.
[0028] Согласно еще одному аспекту настоящего изобретения система использует значение смещающего напорного давления, устанавливаемое в центральном процессоре, которое определяется скоростью (темпом) и коррелирует со скоростью (темпом) перемещения вперед маркированной иглы в ткани. Значение смещающего напорного давления вычисляют и учитывают при вычислении значения напорного давления для исключения смещения давления, вызванного встречным давлением на иглу, полученным в результате перемещения иглы вперед при одновременном использовании непрерывного потока и мониторинга давления.
[0029] Согласно еще одному аспекту настоящего изобретения предложено инъекционное устройство, которое обеспечивает ток от 0,15 мА до 2,0 мА. Ток обеспечивается в ответ на определяемое значение давления на выходе. Кроме того, электрический разряд должен действовать в течение дискретного периода от 1,0 сек до 10,0 сек. Одновременно, когда действует электрический разряд, центральному процессору передается управляющий сигнал, требующий ответа. Пример ответа на управляющий сигнал:
i) подтверждение сокращения мышцы;
ii) изменение скорости ввода лекарственного средства на более высокую для дозирования лекарственного средства.
[0030] Согласно еще одному аспекту настоящего изобретения должно иметься первое состояние (конкретное значение давления на выходе при постоянной скорости потока) и второе состояние (электротоковая стимуляция), требующее ответа оператора для задания третьего состояния (наличие/отсутствие наблюдения), для получения результата на выходе (инструкции и предупреждающего сигнала).
[0031] Согласно еще одному аспекту настоящего изобретения предложено устройство, которое обеспечивает средство для продвижения иглы в тканях со скоростью продвижения в диапазоне от 2 мм/сек до 20 мм/сек с постоянным потоком текучей среды при определенной скорости ввода лекарственного средства.
[0032] Согласно еще одному аспекту настоящего изобретения предложены способ и устройство для использования встречного давления при вычислении давления на выходе. Встречное давление зависит от скорости введения иглы. Таким образом, система содержит механизм для управления скоростью введения иглы. В частности, система может содержать метки на игле, а также слуховые или визуальные подсказки для предложения соответствующей скорости введения иглы.
[0033] Согласно еще одному аспекту настоящего изобретения предложен ручной блок, с которым соединена маркированная игла, и который выполнен с возможностью размещения в нем небольшого отображающего устройства, такого как светоизлучающий диод или дисплейный экран, которое обеспечивает мигание или визуальную инструкцию, и/или громкоговорителя, подающего звуковой сигнал или звуковой тон, который может быть прерывистым, для обеспечения возможности координации определенного перемещения вперед с указанным подаваемым визуальным или звуковым сигналом для продвижения иглы на основании маркеров на поверхности иглы при ее проникновении через кожу или другую часть тела. Звуковая и визуальная модуляция определяют скорость продвижения иглы таким образом, что скорость продвижения иглы можно координировать с перемещением вперед для повышения точности определения возникающего встречного давления, используемого при вычислении давления на выходе, отслеживаемого в режиме реального времени.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0034] Приведенные выше раскрытие сущности изобретения и следующее подробное описание предпочтительных вариантов реализации настоящего изобретения будут лучше всего понятны при прочтении со ссылкой на сопроводительные чертежи, на которых:
[0035] ФИГ. 1 показывает перспективный вид системы для доставки лекарственного средства;
[0036] ФИГ. 2 показывает перспективный вид системы для доставки лекарственного средства, показанной на ФИГ. 1, без инъекционного узла;
[0037] ФИГ. 3 показывает вид сбоку инъекционного узла для системы доставки лекарственного средства, показанной на ФИГ. 1;
[0038] ФИГ. 4 показывает местный вид сбоку альтернативного инъекционного узла для системы доставки лекарственного средства, показанной на ФИГ. 1;
[0039] ФИГ. 5 показывает функциональную схему системы для доставки лекарственного средства, показанной на ФИГ. 1;
[0040] ФИГ. 6 показывает функциональную схему системы для доставки лекарственного средства согласно еще одному варианту реализации;
[0041] ФИГ. 7 показывает снимок экрана дисплейного монитора для системы доставки лекарственного средства, показанной на ФИГ. 1;
[0042] ФИГ. 8 показывает увеличенный фрагментарный вид среза части позвоночного столба пациента с еще одним вариантом реализации системы доставки лекарственного средства;
[0043] ФИГ. 9 показывает схематический вид системы доставки лекарственного средства, показанной на ФИГ. 8, при использовании пациенту;
[0044] ФИГ. 10 показывает вид сбоку узла иглы согласно еще одному варианту реализации, выполненного с возможностью соединения с системой доставки лекарственного средства, показанной на ФИГ. 1;
[0045] ФИГ. 11 показывает график давления текучей среды в зависимости от времени при введении иглы в эпидуральной процедуре с использованием лекарственного средства;
[0046] ФИГ. 12 показывает вид в разрезе нервного пучка с нервными волокнами;
[0047] ФИГ. 13 вид сбоку инъекционного устройства для системы доставки лекарственного средства, показанной на ФИГ. 2; и
[0048] ФИГ. 14 показывает блок-схему способа введения текучей среды.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0049] На чертежах в целом и на ФИГ. 1-3 в частности показана система для инфузии лекарственного средства, в целом обозначенная позиционным номером 5. Система 5 содержит одноразовый инъекционный узел 10 и управляемый компьютером инструмент 50 для доставки лекарственного средства, называемый исполняющим блоком. Инъекционный узел 10 содержит вводную иглу 24, выполненную с возможностью введения в тело субъекта-млекопитающего. Инъекционный узел 10 соединен с исполняющим блоком 50, который во время использования управляет потоком текучей среды к инъекционному узлу. Система 5 также содержит один или более устройств вывода, которые предоставляют данные врачу-специалисту во время процедуры для помощи в надлежащем введении иглы в тело субъекта.
[0050] Система 5 выполнена с возможностью определения точного местоположения заполненной текучей средой ткани, такой как эпидуральное пространство, внутрисуставное пространство, глазное яблоко, кисты, сосуды и другие заполненные текучей средой полости тела. Система также выполнена с возможностью доставки лекарственного средства в такую заполненную текучей средой ткань. Лекарственное средство может содержать помимо прочего местные анестезирующие препараты, такие как кортикостероиды, гидроксиапатит, взаимно дополняющие лекарственные средства, склерозирующие агенты и другие лекарственные средства, которые обычно вводят в заполненное текучей средой тканевое пространство в терапевтических целях.
[0051] Введенная текучая среда всасывается в тканях с различной скоростью. В результате давление жидкости изменяется. Таким образом, это давление жидкости (или внутреннее давление, относящееся к давлению сопротивления ткани) указывает на несколько типов тканей и может использоваться для идентификации различных типов тканей.
[0052] Система 5 предоставляет лечащему врачу возможность точной идентификации заполненного текучей средой тканевого пространства с одновременным ограничением размещения лекарственных средств в нецелевых тканях. Это относится как к диагностическим, так и к терапевтическим процедурам. Система 5 использует давление текучей среды, вытекающей из иглы или катетера, после размещения иглы/катетера в ткани для идентификации точности размещения и мониторинга размещения во время инъекции или аспирации.
[0053] В частности, система 5 содержит одно или более устройств вывода для обеспечения визуальной обратной связи относительно обнаруженного давления текучей среды во вводной игле. Оператор использует визуальную обратную связь в качестве контрольного средства во время размещения вводной иглы. Как показано на ФИГ. 1 и 2, первое устройство вывода может быть экраном видеодисплея, такого как ЖК дисплей для показа данных для помощи оператору. Кроме того, также может быть обеспечено второе устройство вывода. Например, второе устройство вывода может быть светоизлучающим элементом, выполненным с возможностью выдачи выходного сигнала, который находится в поле зрения оператора, во время процедуры. Например, второе устройство вывода может быть светоизлучающим элементом, выполненным с возможностью проецирования светового пучка на тело пациента рядом с участком, где иглу вводят в тело пациента.
ИНЪЕКЦИОННЫЙ УЗЕЛ
[0054] Как показано на ФИГ. 3-4, система 5 содержит одноразовый инъекционный узел 10, который содержит шприц 18 и удлиненный отрезок гибкой трубки 22, имеющий первый конец, соединенный с шприцем, и вводную иглу 24, соединенную с вторым концом. Таким образом, текучая среда из шприца может вытесняться через трубку 22 в иглу 24. Инъекционный узел 10 также содержит датчик давления для определения давления текучей среды в инъекционном узле. Датчик давления может быть расположен в одном из нескольких местоположений для измерения давления, которое коррелирует с давлением текучей среды в кончике иглы 24. В данном случае датчик 20 давления является встроенным датчиком давления текучей среды, прикрепленным к шприцу 18 между шприцем и трубкой 22. Таким образом, датчик 20 давления измеряет давление текучей среды, когда текучая среда выходит из шприца и входит в трубку 22, с которой соединена вводная игла 24.
[0055] Управляемая компьютером система 50 доставки лекарственного средства в системе, показанной на ФИГ. 1-2, обеспечивает множество преимуществ для пациентов за счет точного проведения инъекции. Выходной кабель 21 соединяет датчик 20 давления с системой 50 для доставки лекарственного средства, так что система для доставки лекарственного средства может изменять поток текучей среды из шприца в ответ на данные от датчика давления 20. Таким образом, система 50 доставки лекарственного средства обеспечивает точное и безопасное введение лекарственных средств для различных случаев применения, таких как перидуральная анестезия, внутрисуставные и другие подкожные инъекции. Соединение 12 соединено с вторым кабелем 23 и разъемом 30, который вставляют в инструмент 50. Датчик 20 давления соединен последовательно между передним концом 19 цилиндра шприца 18 и первым концом 25 трубки 22. Одно приведенное в качестве примера соединение является люэровским соединением для соединения датчика 20 давления с кончиком шприца. Указанное соединение может быть зафиксировано резьбовым соединением и/или нереверсивным резьбовым соединением, таким как замковое соединение люэровского типа. Согласно еще одному варианту реализации в данном случае датчик 20 давления постоянно прикреплен к шприцу сваркой в пластическом состоянии или химическим связующим компонентом, таким как адгезив. Таким образом, мгновенное фактическое давление текучей среды в линии 22 доставки лекарственного средства распознается и используется инструментом, что обеспечивает точное приближение к фактическому мгновенному давлению текучей среды в точке иглы 24 или на кончике иглы 24 и, таким образом, в местоположении в теле пациента, где расположен кончик иглы. Электронный датчик 20 давления передает данные о давлении через кабели 21, 23 для электронных данных, которые соединены непосредственно с центральным блоком 50 для сбора результатов измерения давления.
[0056] Одноразовый инъекционный узел 10 выполнен в форме одноразового расходного набора, в котором все компоненты соединены, и в данном случае соединение является постоянным. Например, компоненты инъекционного узла могут быть скреплены вместе сваркой или клеем, эпоксидом или другим адгезивом, т.е. шприц 18 постоянно соединен с установленным в трубку 22 электронным датчиком давления или преобразователем 20, постоянно соединенным между ними. Этот одноразовый узел 10 используется и утилизуется как отдельный блок. Он также соединен с исполняющим блоком 50 посредством второго соединителя 16, который может быть вставлен в соединитель 14 ключевым способом для обеспечения использования только санкционированных одноразовых узлов 10 и использования данных узлов только один раз.
[0057] Электронный датчик 20 давления может быть любым из различных датчиков давления. Одним из типов датчика, приведенным в качестве примера, является пьезоэлектрический датчик давления, такой как датчики, имеющиеся в продаже в компании Merit Medical Systems, Inc, такие как датчик давления торговой марки Meritrans® модели MER212.
[0058] Согласно предпочтительному варианту реализации постоянное крепление иглы может быть опциональным, так что лечащий врач может выбрать предпочтительную иглу для конкретной цели. Компоненты собраны индивидуально или согласно предпочтительному варианту реализации склеены (т.е. соединены) вместе и обеспечены в форме одиночного одноразового набора, для которого были выбраны надлежащие одноразовые компоненты.
[0059] Предпочтительным вариантом реализации является соединенный одноразовый набор. Предполагается, что в соединении с инструментом 50 могут использоваться различные конфигурации. Они состоят из компонентов различных размеров, т.е. иглы, шприца, набора трубок и датчиков давления. Система может включать в себя идентифицирующий соединитель, который однозначно идентифицирует детали каждого инъекционного узла (например, размер иглы, длину трубки и т.п.). Включение в комплект идентифицирующего соединителя позволяет подтвердить и идентифицировать предполагаемую к использованию одноразовую комплектацию. Такой подход обеспечивает верификацию системы, что способствует использованию соответствующих компонентов и/или лекарственных средств. Предполагается, что предварительно заполненный лекарственным средством шприц 18 может быть снабжен инъекционным узлом 10, или шприц может поставляться пустым, так что он может быть заполнен на месте необходимым лекарственным средством, физиологическим раствором или другой текучей средой. Для предварительно заполненных шприцев 18 идентифицирующий соединитель 12 содержит (в микрочипе) информацию, относящуюся к лекарственному средству, содержащемуся в шприце.
[0060] На ФИГ. 4 показаны части одноразового инъекционного узла согласно еще одному варианту реализации. Этот вариант реализации содержит удлиненную в осевом направлении жесткую пластиковую стерильную рукоятку 27, прикрепленную к второму концу трубки 22 и имеющую соединитель, такой как штекерный люэровский замок, который должен разъединяемым способом соединяться с иглой 24, выбранной для конкретного типа инъекции в выбранный анатомический участок. Удлиненная рукоятка 27 согласно данному варианту реализации облегчает ручное управление и точность размещения иглы, в частности, благодаря поворотному управлению. Это, в частности, является полезным при внутрисуставных (IA) инъекций (т.е. нижнеальвеолярных инъекций), а также может облегчить выполнение эпидуральных инъекций и инъекций других типов. Удлиненная рукоятка 27 предпочтительно имеет длину примерно 15 см (примерно 6 дюймов), или ее длина находится в предпочтительном диапазоне примерно 10-20 см, с трубкой 22, имеющей длину примерно 122 см (примерно 48 дюймов).
АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДОСТАВКИ ТЕКУЧЕЙ СРЕДЫ
[0061] Как описано выше, система 5 содержит систему 50 доставки текучей среды для обеспечения управляемого потока лекарственного средства в инъекционный узел 10. Предпочтительно система доставки текучей среды является автоматизированной системой и в данном случае является управляемой компьютером системой доставки текучей среды, называемой исполняющим блоком 50.
[0062] Как показано на ФИГ. 1-4, указанный исполняющий блок предназначен для работы в соединении с одноразовым инъекционным узлом 10. Исполняющий блок имеет полуцилиндрическое гнездо 52 для шприца, расположенное в верхней поверхности исполняющего блока 50, как показано на ФИГ. 2. Указанное гнездо выполнено с возможностью приема шприца 18 инъекционного узла 10. Пара пружинных зажимов взаимодействует со шприцем для удерживания шприца в гнезде 52. Поперечный паз в гнезде выполнен с возможностью взаимодействия с упором 88 для пальцев на конце цилиндра шприца. Таким образом, упор для пальцев цилиндра шприца взаимодействует с пазом 55 и препятствует осевому смещению цилиндра шприца относительно гнезда 52. Гнездо 52 дополнительно содержит часть, выполненную с возможностью приема поршня 70 шприца 18. Как показано на ФИГ. 1, указанное гнездо имеет такую длину, которая позволяет принять в гнездо цилиндр шприца и поршень, когда поршень вытянут к заднему концу цилиндра поршня. В частности, длина гнезда больше, чем максимальная длина шприца в его раздвинутом состоянии, так что шприц может быть размещен в гнезде без взаимодействия с поршнем, когда поршень выдвинут из цилиндра на максимальную длину.
[0063] Исполняющий блок 50 содержит выполненную с возможностью перемещения платформу 58, имеющую три нагруженные пружиной защелки или крючка 60 для упора под большой палец, которые шарнирно установлены на платформе 58. Исполняющий блок 50 управляет смещением выполненной с возможностью перемещения платформы для управления выпуском текучей среды из шприца. В частности, платформа 58 выполнена с возможностью перемещения вдоль оси гнезда 52 для вдвигания поршня 70 в цилиндр шприца. Первоначально платформу 58 перемещают вперед для взаимодействия с поршнем. В частности, платформа смещается вперед (вправо относительно перспективного вида, показанного на ФИГ. 1), пока скошенные поверхности трех крючков не начнут взаимодействовать с упором 72 под большой палец поршня 70. Непрерывное смещение платформы 58 принуждает упор под большой палец расклинивать крючки 60 радиально наружу, пока крючки не пройдут радиально наружу за наружный диаметр указанного упора под большой палец. При продолжении продвижения платформы 58 скошенные поверхности крючков 60 проходят мимо упора 72 под большой палец, и в этой точке крючки защелкиваются, сближаясь друг с другом, за упором 72 под большой палец, так что платформа надежно взаимодействует с упором под большой палец, и смещение платформы приводит к смещению поршня.
[0064] После того, как платформа 58 захватила упор под большой палец, датчик в исполняющем блоке 50 распознает сопротивление дальнейшему перемещению платформы 58, и платформа останавливается. На этом этапе поршень 70 фактически прикреплен в осевом направлении к платформе 58 благодаря взаимодействию защелок 60 с упором 72 под большой палец. Таким образом, дальнейшее перемещение слева вправо платформы 58 также вызывает перемещение поршня 70 вправо с вытеснением текучей среды из корпуса шприца. Подобным образом, любое втягивание платформы (т.е. перемещение влево относительно ФИГ. 1) вызывает всасывание текучей среды назад в корпус шприца.
[0065] Датчик 20 давления узла 10 вставлен в проприетарный соединитель 12, и соединитель 12 соединен с блоком 50 посредством разъема 30. В исполняющем блоке 50 размещен микропроцессор или центральный процессор 82, панель 92 с электронными схемами, источник 94 питания и электронный двигатель или двигатели 96 (поскольку могут быть использованы два шприца, как показано на ФИГ. 5-6). Каждый электронный двигатель 96 вращает червячный вал 98, который перемещает арматуру 90 шприца в переднем или заднем направлении. Арматура 90 шприца содержит датчик нагрузки для определения силы. Арматура 90 соединена с платформой 58 с возможностью перемещения платформы в любом направлении. Как указано выше, одноразовый инъекционный узел 10 содержит идентификационно-соединительный компонент 12, шприц 18, поточный датчик 20 давления, набор 22 трубок и иглу 24.
[0066] Исполняющий блок 50 выполнен с возможностью обеспечения постоянного или изменяемого потока текучей среды. В данном случае исполняющий блок может обеспечивать прерывистый поток текучей среды в ответ на сигналы, принятые от электронного датчика 20 давления, который непрерывно распознает давление текучей среды во время процедуры введения/инъекции. На основании заданного давления исполняющий блок 50 может остановить поток текучей среды, когда определенное давление превышает заданное пороговое значение. Заданное пороговое значение может быть установлено лечащим врачом и сохранено в запоминающем устройстве 80 микропроцессора или компьютера 82, расположенного в электронной части в исполняющем блоке 50. Подобным образом, на основании заданного давления поток текучей среды возобновляется, когда давление текучей среды упадет ниже заданного давления. То же самое заданное давление может использоваться для управления прекращением и возобновлением потока текучей среды. В этом случае давление будет нарастать, пока текучая среда первоначально поступает в ткань, до заданного уровня, и затем поток прекратится до падения давления ниже этого заданного уровня. После падения давления текучей среды ниже заданного уровня поток текучей среды будет возобновлен. Таким образом, поток текучей среды может начинаться и прекращаться во время процедуры, превращаясь в прерывистый поток текучей среды.
[0067] Система может включать в себя предварительно заданные пороговые значения давления, используемые для управления потоком лекарственного средства из шприца 18 во время процедуры. Это позволяет лечащему врачу выборочно вводить лекарственные средства в конкретные местоположения и намеченные ткани для диагностических и терапевтических процедур. Предварительно выбранные максимальные допустимые пределы давления и/или расходы сохранены в запоминающем устройстве 80 и определяют максимальные рекомендуемые давления, которым обычно подвергаются пациенты, или другие критерии. При приближении давления к этому пороговому значению генерируются оптический и/или звуковой сигналы тревоги для лечащего врача, т.е. на экране 62 и посредством громкоговорителя 84, которые активируются данными из микропроцессора 82. Кроме того, данные, описывающие весь процесс инъекции, сохраняются в запоминающем устройстве 80 для последующего анализа.
[0068] Система 5 может непосредственно измерять давление текучей среды в инъекционном узле 10, или система может измерять характеристику, указывающую давление текучей среды в инъекционном узле. Например, давление может быть измерено путем определения сопротивления давления, измеренного во время инфузии. Измеряемое сопротивление давления непрерывно преобразуется в визуальный сигнал во время процедуры введения. Однако расход лекарственного средства во время процедуры может быть основан на давлении текучей среды, обнаруживаемом в режиме реального времени в течение процедуры. Таким образом, расход лекарственного средства изменяется и зависит от давления в системе. Таким образом, давление текучей среды может быть первичной переменной управления системы.
[0069] Таким образом, скорость ввода лекарственного средства становится вторичной переменной, которая модулируется в пределах заданного диапазона для поддержки необходимого потока текучей среды. Согласно одному конкретному варианту реализации поток текучей среды прекращается, когда давление превышает заданное пороговое значение (максимальное давление). Скорость ввода лекарственного средства в качестве вторичной переменной может быть ограничена таким образом, чтобы инъекции текучей среды не выполнялись слишком быстро при низком давлении. Предполагается, что связь между давлением и расходом текучей среды может быть бинарной или непрерывной. Бинарная связь существует, когда инъекционное устройство выполнено с возможностью доставки текучей среды с одиночным заданным расходом для любого давления, которое меньше, чем заданное максимальное значение. Таким образом, поток текучей среды возобновляется или прекращается на основании того, превышает ли давление указанное пороговое значение. Согласно еще одному варианту реализации расход может быть модулирован и как функция давления. В этом случае расход будет уменьшаться при приближении давления к максимальному допустимому значению и увеличиваться при падении давления. Согласно еще одному варианту реализации расход может быть ограничен первым заданным максимальным давлением и может возобновляться при втором заданном давлении, отличающемся от первого.
[0070] Как указано выше, система 5 может содержать механизм для показа соответствующих данных об инъекции, включая, например, мгновенные расходы, давления и объем инъекции на экране 62 исполняющего блока 50. Подобным образом, система может содержать механизм для записи такой информации для последующего анализа после выполнении процедуры. Например, система может содержать энергонезависимое электронное накопительное устройство, такое как накопитель на жестких дисках, флэш-диск, оптический привод или другой носитель для сохранения электронных данных.
[0071] Все измерения и информация могут быть представлены лечащему врачу "в режиме реального времени" таким образом, чтобы лечащий врач мог определить, доставляется ли инъекция в намеченное местоположение и/или правильно определенные ткани, и модифицировать процесс инъекции соответствующим образом. Кроме того, измерения могут быть записаны для более позднего просмотра и документирования клинического случая.
[0072] Также предполагается, что могут быть использованы множество шприцев, которые приводятся в действие отдельными поршнями, для обеспечения возможности введения множества лекарственных средств, а также второй привод шприца, для которого не требуется, чтобы было достигнуто заданное давление, для любой вышеуказанной цели. Второй привод может быть запрограммирован на конкретную скорость ввода лекарственного средства для обеспечения возможности инфузии лекарственного средства, такого как местный анестетик и другие терапевтические лекарственные средства, в различные ткани.
[0073] Согласно еще одному варианту реализации устройство может содержать два различимых привода шприца, оба из которых выполнены с возможностью модулирования на основании давления текучей среды, как описано выше в настоящей заявке.
ВИЗУАЛЬНЫЙ ИНДИКАТОР ДАВЛЕНИЯ ТЕКУЧЕЙ СРЕДЫ
[0074] Как показано на ФИГ. 1, система содержит генератор 100 визуального сигнала для выдачи визуальных сигналов, соответствующих давлениям текучей среды, обнаруженным системой. Генератор 100 визуального сигнала обеспечивает обратную связь для оператора, чтобы направлять оператора во время введения иглы 24 в тело субъекта. В частности, визуальные сигналы из генератора 100 визуального сигнала обеспечивают непрерывные сигналы, относящиеся к близости кончика иглы к намеченному местоположению, такому как заполненное текучей средой пространство.
[0075] Генератор 100 визуального сигнала может быть любым из различных световых индикаторов. Например, как показано на ФИГ. 1, генератор визуального сигнала может содержать световую головку 105, установленную на конце гибкого кабеля 102. Гибкий кабель 102 может иметь достаточную жесткость, так что кабель может быть изогнут в необходимое положение для достижения нужной ориентации и удерживать это положение без внешней опоры. Таким образом, оператор может расположить осветительный элемент таким образом, чтобы световая головка 105 была направлена к поверхности, которая находится в поле зрения оператора, в то время как внимание самого оператора сосредоточено на участке введения на теле пациента. Например, свет от осветительного элемента может проецироваться на поверхность, соседнюю с телом субъекта, такую как стена или другая плоская поверхность. Согласно еще одному варианту реализации предпочтительно световая головка 105 может быть расположена таким образом, чтобы она проецировала световой пучок на пациента. Например, свет от осветительного элемента может быть направлен непосредственно на кожу или одежду субъекта. Более конкретно, свет может проецироваться на тело пациента рядом с участком введения таким образом, чтобы световые сигналы от генератора 100 визуального сигнала находились в пределах поля зрения оператора, в то время как сам оператор визуально отслеживает участок введения. Таким образом, визуальные сигналы от генератора 100 визуального сигнала предоставляют оператору полезную информацию относительно инъекции, не вынуждая его отводить взгляд от участка инъекции.
[0076] Световая головка 105 может содержать любой из различных осветительных элементов. Например, световая головка 105 может содержать светоизлучающий диод, лампу накаливания, лазерный диод или любой другой светоизлучающий элемент. Кроме того, осветительный элемент 105 может содержать множество таких светоизлучающих элементов. А также осветительный элемент 105 может содержать множество осветительных элементов, изменяющих интенсивность света, цвет и/или когерентность. Не смотря на то, что световая головка 105 может содержать один или более элементов рассеянного света, предпочтительно световая головка 105 обеспечивает световой пучок, который является достаточно когерентным для проецирования на пациента и является легко различимым для оператора во время процедуры. Поэтому световая головка 105 может содержать линзу 107 для фокусировки света осветительного элемента (элементов), как показано на ФИГ. 2.
[0077] Светом, выработанным генератором 100 визуального сигнала, управляет исполняющий блок 50. В частности, генератором 100 визуального сигнала управляют в ответ на электрические сигналы от микропроцессора 80 исполняющего блока 50. Исполняющий блок может содержать отдельную управляющую схему, которая управляет генератором 100 визуального сигнала в ответ на управляющие сигналы, принятые от микропроцессора 80 исполняющего блока. В частности, электронное управляющее устройство для цепи освещения может быть выполнено с возможностью раздельного управления каждым из множества осветительных элементов в световой головке 105. Схема управления светом может управлять каждым осветительным элементом путем его включения или выключения. Схема управления светом может управлять интенсивностью каждого осветительного элемента. Кроме того, схема управления светом может управлять комбинациями осветительных элементов для изменения света, вырабатываемого генератором визуального сигнала. Например, схема управления светом может задействовать сочетания осветительных элементов для изменения цвета светового потока, испускаемого световой головкой 105. Например, световая головка может содержать множество красных, зеленых и синих осветительных элементов, и электронное управляющее светом устройство может выборочно управлять освещением разноцветных осветительных элементов для создания луча света, имеющего красный, желтый или зеленый, или любой из различных цветов.
[0078] Согласно еще одному варианту реализации схема управления светом может управлять осветительными элементами для создания изменяющихся шаблонов света, проецируемого генератором визуального сигнала. Например, генератор визуального сигнала может проецировать луч света, имеющий конкретный шаблон. Согласно одному варианту реализации генератор 100 визуального сигнала проецирует первый окрашенный сигнал, когда датчик 20 давления определяет давление в пределах первого диапазона; и генератор визуального сигнала может проецировать второй окрашенный сигнал, когда датчик давления определяет давление в пределах второго диапазона. Кроме того, когда датчик давления определяет сигнал, приближающийся к пороговому значению между первым диапазоном и вторым диапазоном давлений, генератор визуального сигнала может проецировать луч, в котором одна различимая часть луча имеет первый цвет, и другая различимая часть луча имеет второй цвет.
[0079] В дополнение к управлению интенсивностью светом, цветом и шаблоном, схема управления светом может управлять частотой мигания света. В частности, свет может быть прерывистым, так что луч света вспыхивает и гаснет. Частотой цикла включения/выключения можно управлять в ответ на давление, определяемое системой. Схема управления светом может управлять генератором визуального сигнала на основании абсолютного значения обнаруженного давления. Согласно еще одному варианту реализации схема управления светом может управлять индикатором на основании относительного значения обнаруженного давления, означающего текущее значение относительно самого последнего обнаруженного давления. Таким образом, схема управления светом может изменять свет в зависимости от того, увеличивается давление или уменьшается. Подобным образом, схема управления светом может управлять светом на основании как абсолютного, так и относительного значения обнаруженного давления. Например, схема управления светом может управлять осветительными элементами для генерации светового пучка, имеющего определенный цвет, на основании обнаруженного давления, находящегося в пределах конкретного диапазона давлений. Кроме того, на основании относительного давления, указывающего, что давление поднимается, схема управления светом может принуждать генератор визуального сигнала мигать избранным цветом. Кроме того, светом можно управлять таким образом, чтобы частота мигания увеличивалась при увеличении давления до верхнего конца диапазона давлений. Как только давление увеличивается с выходом за пределы диапазона давлений, так что давление уже находится в нижнем конце второго диапазона давлений, схема управления светом может управлять генератором визуального сигнала таким образом, что он генерирует свет различных цветов, мигающий с низкой частотой, когда давление находится в нижнем конце второго диапазона давлений.
[0080] Из вышесказанного понятно, что генератор 100 визуального сигнала может обеспечивать огромное количество цветов и шаблонов, которые могут обеспечивать непрерывные сигналы обратной связи для оператора с целью их использования для наведения во время процедуры введения иглы. Ниже описаны некоторые примеры конкретного способа, согласно которому генератор 100 визуального сигнала может выдавать непрерывные световые сигналы обратной связи.
[0081] Как описано выше, генератор визуального сигнала может проецировать световой пучок на любую из различных поверхностей, что обеспечивает возможность оператору видеть световой сигнал с одновременной поддержкой концентрации внимания на участке инъекции. Ниже описано каким образом свет проецируется на тело пациента. Следует понимать, что это описание приведено только в качестве примера поверхности, на которую проецируется свет.
[0082] Исполняющий блок 50 может быть запрограммирован таким образом, что генератор визуального сигнала проецирует желтый свет, когда определяемое давление находится в диапазоне 0-20 мм рт.ст. (0-2,7 КПа), зеленый свет, когда определяемое давление находится в диапазоне 20-40 мм рт.ст. (2,7-5,3 КПа), и красный свет, когда определяемое давление находится в диапазоне 40-200 мм рт.ст. (5,3-26,7 КПа). Свет может мигать при увеличении давления. Таким образом, генератор визуального сигнала проецирует мигающий желтый луч на пациента, когда иглу вводят в тело пациента, и давление увеличивается до порогового значения давления 20 мм рт.ст. (2,7 КПа). Как только давление увеличивается до 20 мм рт.ст. (2,7 КПа), световой индикатор изменяется таким образом, что на пациента проецируется луч зеленого света. И свет мигает, пока давление увеличивается. Если давление остается постоянным, свет также остается постоянным (т.е. без мигания). Кроме того, при продвижении иглы и увеличении давления до 40 мм рт.ст. (5,3 КПа) частота мигания растет, пока давление не достигнет 40 мм рт.ст. (5,3 КПа). В этой точке частота мигания значительно уменьшается, и цвет светового луча изменяется на красный.
[0083] В приведенном выше описании генератор визуального сигнала выдает непрерывный сигнал обратной связи, соответствующий обнаруженному давлению, так что оператор может легко распознать различные данные об обнаруженном давлении, включая помимо давления скорость изменения давления и направление изменения давления (увеличение, уменьшение) или незначительное изменение. Также следует понимать, что генератор визуального сигнала может обеспечивать цветовые сигналы, которые обозначают предупреждение, сигнал тревоги, ошибку системы или отказ, или любые другие различные сбои системы, которые требуют внимания оператора. Например, в вышеуказанном примере красный цвет используется для указания, что давление текучей среды находится в пределах конкретного диапазона. Согласно еще одному варианту реализации красный цвет (или любой другой цвет) может быть предназначен для указания предупреждения, ошибки или другого сигнала тревоги. Таким образом, когда генератор 100 визуального сигнала проецирует красный луч или мигает красным лучом, оператор легко оповещается о проблеме, которая требует внимания.
[0084] Кроме того, в приведенном выше описании генератор 100 визуального сигнала обеспечивает луч, который соответствует определенному состоянию или характеристике давления на выходе для инъекционного узла. Также следует понимать, что отсутствие света от генератора визуального сигнала также может быть использовано для предоставления информации оператору. Например, генератор визуального сигнала может быть выключен, чтобы свет не проецировался при падении давления в пределах определенного диапазона. Например, если давление ниже 10 мм рт.ст. (1,3 КПа), генератор визуального сигнала может быть выключен.
[0085] В дополнение к различным цветам и шаблонам генератор 100 визуального сигнала может обеспечивать графическую и/или удобочитаемую для человека информацию, включая, помимо прочего цифры, буквы и символы. Например, генератор 100 визуального сигнала может проецировать числовое значение давления, обнаруженного датчиком 20 давления. Таким образом, оператор может легко видеть изменение давления в режиме реального времени, не отвлекая своего внимания от участка инъекции и иглы, которой он манипулирует. Кроме того, графическая информация может быть объединена с изменениями цвета или шаблоном для предоставления оператору дополнительной информацию. Например, генератор визуального сигнала может проецировать числовое значение давления, обнаруженного в режиме реального времени. Кроме того, цвет проецируемых цифр может изменяться при переходе значения давления из одного диапазона давлений в следующий, как описано выше. Подобным образом, количество может проецироваться с постоянным цветом, таким как темный цвет, и количества могут быть встроены в фон, имеющий цвет, который относится к конкретному диапазону давлений или другой характеристике, как описано выше.
[0086] Разумеется, графическая информация, проецируемая генератором визуального сигнала, не ограничивается алфавитно-цифровыми знаками. Генератор визуального сигнала может обеспечивать графические данные любых различных типов. Например, генератор визуального сигнала может проецировать график обнаруженных значений давления в течение длительного времени таким образом, чтобы оператор мог видеть графическую иллюстрацию, представляющую на графике изменение давления, включая величину изменения, скорость изменения и различные точки перегиба. Подобным образом, отображаемые данные не должны ограничиваться значениями давления в режиме реального времени, обнаруженными датчиком 20 давления или полученными иным способом. Данные, проецируемые генератором визуального сигнала, могут содержать информацию, такую как скорость ввода лекарственного средства или текучей среды через инъекционный узел 10, объем текучей среды в шприце, затраченное время с момента начала введения иглы и данные о пациенте. Соответственно, следует понимать, что генератор визуального сигнала может быть выполнен и может управляться таким образом, чтобы проецировать любые визуальные данные, которые могут быть представлены на экране отображающего устройства, таком как светодиодный экран, экран ЖК дисплея или экран ЭЛТ. Генератор визуального сигнала будет проецировать такие визуальные данные способом, согласно которому оператор может легко видеть эти данные, не совершая специальных действий для их получения и не отвлекая своего внимания от манипуляции иглой.
[0087] В приведенном выше описании генератором 100 визуального сигнала является осветительный элемент, который проецирует визуальную обратную связь для оператора для использования при направлении введения иглы в тело субъекта. В приведенных выше вариантах реализации генератор 100 визуального сигнала установлен на полужестком плече или кабеле, соединенном с исполняющим блоком таким образом, что осветительный элемент может быть расположен в желательном местоположении и ориентирован с возможностью проецирования света на необходимый целевой участок. На ФИГ. 4 показан генератор 200 визуального сигнала согласно еще одному варианту реализации. Согласно данному варианту реализации генератор визуального сигнала установлен на элементе одноразового инъекционного узла 10 и/или соединен непосредственно с указанным элементом. В частности, инъекционный узел 10 содержит удлиненную втулку 27, соединенную с трубкой 22 для текучей среды. Втулка 27 содержит установочный элемент для соединения иглы 24 с втулкой. Например, втулка 27 может содержать люэровский соединитель.
[0088] Как показано на ФИГ. 4, генератор 200 визуального сигнала может быть установлен на удлиненной втулке или соединен с удлиненной втулкой иным способом. Таким образом, втулка 27 представляет собой удлиненный жесткий элемент для поддержки генератора 200 визуального сигнала. Генератор визуального сигнала проецирует визуальный сигнал в направлении вперед, например, на тело пациента или рядом с участком инъекции. Таким образом, генератор визуального сигнала может проецировать луч, ось которого параллельна или по существу параллельна оси иглы 24. Генератор визуального сигнала содержит удлиненный кабель 206, так что генератор визуального сигнала может проходить далеко от исполняющего блока 50. В частности, кабель 206 содержит разъем для соединения генератора визуального сигнала с исполняющим блоком с целью приема управляющих сигналов от исполняющего блока, как описано выше со ссылкой на представленный выше вариант реализации.
[0089] Установленный на втулке 27 генератор визуального сигнала 200 расположен с возможностью проецирования луча света на участок инъекции. В частности, генератор визуального сигнала установлен таким образом, что по меньшей мере часть светового луча 202, испускаемого генератором визуального сигнала, параллельна оси вводной иглы 24. В частности, генератор визуального сигнала может быть соединен с иглой таким образом, что существенная часть светового луча 202 параллельна оси иглы.
[0090] Согласно еще одному варианту реализации визуальным индикатором является осветительный элемент, такой как один или более оптоволоконных элементов, которые обеспечивают визуальный световой сигнал вокруг удлиненной трубки 22 или через удлиненную трубку 22 инъекционного узла 10. Таким образом, свет может проецироваться в текучую среду в трубке таким образом, что световой сигнал находится рядом с иглой вследствие того, что игла соединена с трубкой, и свет проецируется на иглу или пациента благодаря тому, что оптоволоконные элементы проходят вдоль трубки 22. Соответственно, следует понимать, что генератор визуального сигнала может иметь любую конструкцию, которая обеспечивает визуальный сигнал, проецируемый на поверхность, легко видимую для оператора, не отвлекая внимания оператора от участка инъекции.
[0091] Таким образом, преимущества настоящего устройства по сравнению с уровнем техники включают в себя:
(i) механизм для проецирования изображения, представляющего значение давления на выходе на поверхность тела пациента таким образом, что можно определить момент идентификации заполненного текучей средой тканевого пространства, такого как эпидуральное пространство, внутрисуставное пространство, глазное яблоко, кисты и кровеносные сосуды или другие сосуды тела с текучей средой помимо вышеуказанных структур;
(ii) механизм, выполненный с предоставлением оператору возможности непрерывного удерживания поля зрения на участке введения иглы на теле пациента с одновременным проецированием информации на участок введения иглы и избавлением от потребности в дистанционном визуальном экране или от необходимости рассматривания экрана для получения указанной визуальной информации;
(iii) механизм, выполненный с возможностью отслеживания давления на выходе в последовательности заданных диапазонов, в которых светоизлучающий источник предоставляет оператору возможность объективного различения пороговых значений между различными диапазонами посредством различимого видимого изменения, такого как изменение цвета; и
(iv) механизм, выполненный с возможностью отслеживания давления на выходе посредством проецируемого визуального изображения, выполненного с возможностью использования вспыхивающих шаблонов и/или мигающих шаблонов для сообщения о возрастающей или нисходящей тенденции давления на выходе. Сюда же включена возможность передачи сообщения о незначительном изменении давления путем обеспечения визуального указания.
ВЫЧИСЛЕНИЕ ДАВЛЕНИЯ ТЕКУЧЕЙ СРЕДЫ НА ВЫХОДЕ ИГЛЫ
[0092] Как описано выше, давление текучей среды используется для управления работой системы 5. Например, визуальная обратная связь, обеспеченная генератором 100 визуального сигнала основана на определенном давлении текучей среды. Имеются различные способы вычисления давления текучей среды на выходе иглы.
[0093] Датчик давления может обнаруживать давление текучей среды в инъекционном узле 10. Например, как описано выше, датчик давления может быть поточным датчиком давления, таким как датчик давления, имеющийся в продаже у компании Merit Medical part # 0001. Согласно еще одному варианту реализации датчик давления, встроенный в исполняющий блок 50, может обнаруживать давление текучей среды между шприцем 18 и набором 22 трубок. Согласно еще одному варианту реализации используется тензодатчик, расположенный в упоре шприца для большого пальца, для определения силы, действующей на поршень, для вычисления давления в шприце. Сигнал команды от датчика давления передает данные о давлении центральному процессору для вычисления с целью определения давления на выходе. Давление на выходе вычисляется в соответствии с математической формулой, согласно которой вычитают напорное давление в каждом из компонентов, проксимальных относительно точки измерений давления. Кроме того, вычисленное значение обеспечивается относительно встречного давления (действующего против напорного давления), которое коррелирует с конкретным темпом (т.е. скоростью) перемещения иглы вперед сквозь физиологические ткани. Таким образом, значение давления является входным параметром, и вычисленное значение давления вычисляют с учетом всех предполагаемых сопротивлений системы для вычисления окончательного объективного значения давления на выходе. Центральный процессор исполняющего блока для вычисления использует значения на входе и заданные значения, указанные в программном обеспечении. Конечное вычисленное значение давления на выходе используется для управления центральным процессором и управления двигателем, который управляет потоком текучей среды из шприца 18.
[0094] Как указано выше, встречное давление может быть вычтено из измеренного давления для определения конечного значения давления текучей среды. Встречное давление изменяется в ответ на скорость введения, и встречное давление вычитается из измеренного давления текучей среды при вычислении давления текучей среды на выходе. Например, следующие значения представляют значения встречного давления для различных скоростей введения иглы.
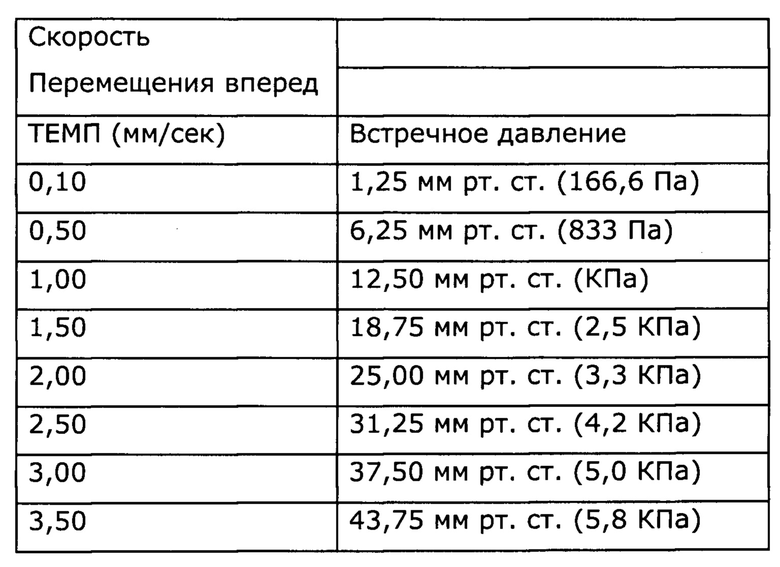
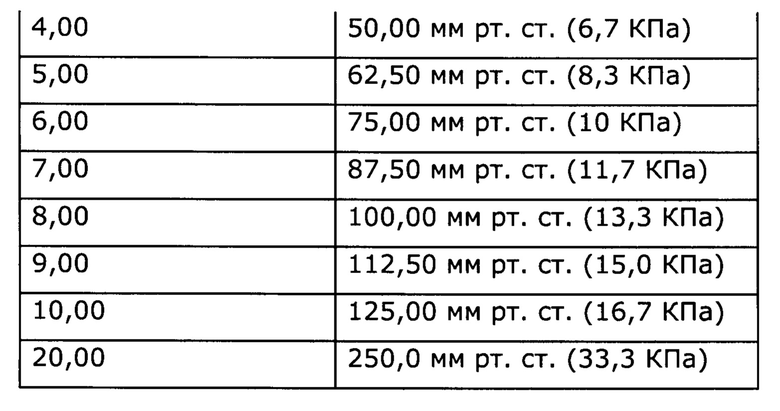
[0095] Поскольку скорость введения иглы значительно влияет на встречное давление, желательно управлять скоростью введения иглы. Соответственно, система может включать в себя ручной блок 300, предназначенный для помощи пользователю при введении иглы с управляемой и известной скоростью. В данном случае применен ручной блок многократного использования. Однако следует понимать, что средства ручного блока могут быть использованы с одноразовым узлом иглы.
[0096] Как показано на ФИГ. 10, ручной блок 300 содержит полый корпус 310 и удлиненную полую иглу 340, проходящую вперед из корпуса. Соединитель 332 обеспечен для соединения ручного блока с линией 22 для текучей среды инъекционного узла 10. В частности, соединитель 332 обеспечивает влагонепроницаемое уплотнение для соединения ручного блока 300 в заднем конце корпуса для облегчения соединения ручного блока с текучей средой в шприце. Текучая среда протекает в ручной блок и вытекает через иглу 340.
[0097] Игла 340 содержит множество меток 344, расположенных вдоль корпуса иглы. В частности, метки содержат множество линий, нанесенных поперек оси иглы. Метки 344 расположены на определенном известном расстоянии друг от друга. В частности, каждая метка 344 расположена на одинаковом расстоянии от соседней метки. Метки предпочтительно расположены по меньшей мере вдоль значительной части длины иглы. В данном случае метки проходят от кончика 342 иглы 340 до соединения между корпусом 310 и иглой. Метки, обозначающие приращение, могут быть нанесены на поверхность иглы лазерным травлением с чередованием цветов или гравировок на поверхностях иглы на определенном расстоянии, таком как, например, приращения на 1,0 см.
[0098] Ручной блок 300 также может содержать световой индикатор 215, выполненный с возможностью обеспечения оператора регулярными подсказками. Световой индикатор 315 может быть светоизлучающим диодом или другим осветительным элементом, который светится с заданной частотой в зависимости от намеченной скорости введения. В частности, перед началом процедуры оператор вводит различные данные относительно процедуры, и на основании этих данных, введенных оператором, определяется скорость введения иглы для процедуры. На основании скорости введения иглы определяется частота мигания индикатора 315. Как подробно описано ниже, световой индикатор работает подобно метроному, который представляет собой постоянный задающий ритм элемент для отслеживания скорости введения иглы с целью повышения точности и стабильности скорости введения иглы.
[0099] Ручной блок дополнительно содержит звуковой индикатор 320, такой как пьезоэлектрический звуковой индикатор, для подачи звукового сигнала, такого как гудение, тон или звон. Звуковой индикатор 320 работает подобно световому индикатору 315, испуская регулярный тон, который может использоваться для задания ритма для скорости введения иглы 24.
[00100] Кроме того, в ручном блоке может присутствовать управляющая кнопка 325. Управляющая кнопка 325 может действовать в качестве кнопки включения/выключения. Однако управляющая кнопка также может быть выполнена с возможностью ввода различных управляющих команд. Например, управляющая кнопка 325 может быть выполнена с возможностью отмены одной или более операций исполняющего блока 50, как подробно описано ниже.
[00101] Наконец, ручной блок 300 также может содержать устройство вывода, такое как экран отображающего устройства для показа различной информации, такой как частота светового индикатора 315 и/или звукового индикатора 320. Кроме того, отображающее устройство может показывать дополнительную информацию, такую как значения давления в режиме реального времени или оповещения "Продолжайте", "Измените положение", "Вводите", Скорость ввода 1, Скорость ввода 2, Низкая скорость, Высокая скорость, "Аспирация".
[00102] Как описано выше, ручной блок содержит визуальный и звуковой индикаторы 315, 320. Разумеется, ручной блок не обязательно должен содержать оба звуковой и визуальный индикаторы; он может содержать только один индикатор. Кроме того, несмотря на то, что выше описаны визуальный и звуковой индикаторы, вместо них могут быть использованы различные другие альтернативные индикаторы, такие как вибрационный элемент, который обеспечивает регулярные вибрационные индикаторные сигналы.
[00103] Определенная звуковая/визуальная модуляция указывает оператору на необходимость продвижения иглы вперед на определенное приращение на основании меток 344 на игле. Перемещение вперед на величину конкретного приращения отсчитывают после проникновения поверхности иглы в поверхность кожи, дермы или части тела, в которые проникает игла. Скорость от 0,5 см/сек до 2,0 см/сек представлена как диапазон перемещения иглы. Точная скорость перемещения достигается координированием звуковой или визуальной модуляции с перемещением маркированной иглы, которая проникает сквозь поверхность, причем указанное перемещение заметно по визуальным меткам на поверхности иглы, обозначающим конкретные расстояния. Затем маркированная игла продвигается на одно приращение (одну метку) сквозь поверхность ткани в соответствии с одним "звуковым сигналом" и/или "миганием".
[00104] Скорость звуковых и/или визуальных подсказок задана в центральном процессоре и активируется потоком текучей среды. Предусмотрен диапазон от 0,5 см/сек до 2,0 см/сек, однако подразумевается, что может быть использована любая скорость координируемого нарастающего перемещения меток, отображающих перемещение иглы. Эта скорость перемещения вперед, выбранная из заданных значений, вводит соответствующее значение встречного давления, которое будет вычтено из результата вычисления при определении объективного значения тканевого давления.
[00105] В качестве примера рабочей скорости, оператор продвигает иглу на 1,0 см при каждом звуковом сигнале и визуальном "мигании" светоизлучающего диода, чтобы обеспечить координацию точной скорости продвижения иглы. Такой подход обеспечивает возможность поддержки точной скорости продвижения иглы. Кроме того, во время продвижения иглы обеспечен непрерывный поток текучей среды из иглы, и обеспечено непрерывное отслеживание давления в режиме реального времени.
[00106] Как указано выше, ручной блок 300 может содержать управляющую кнопку. Управляющая кнопка может быть использована, когда игла не продвигается. В этом случае нажатие кнопки вызывает отправку управляющего сигнала в исполняющий блок 50, чтобы значение встречного давления не вычиталось из результата вычисления давления на выходе (поскольку игла не продвигается, имеет место нулевое или по существу нулевое встречное давление). Подразумевается, что кнопка или средство управления на ручном блоке 300 также могут быть активированы для соответствия перемещениям вперед, при которых встречное давление вычитается из результата вычисления напорного давления, и, таким образом, обеспечено средство для различения, когда игла продвигается, и когда она остается неподвижной в ткани. Таким образом, активация кнопки 325 во время периодов со скоростью введения иглы от минимальной до нулевой способствует точности значений давления на выходе из иглы в ткани во время процедуры. В дополнение к переключателю или управляющей кнопке, описанным выше, ручной блок может содержать вторую кнопку или управляющий элемент, использование которых при обратных перемещениях добавляло бы дополнительное значение напорного давления в качестве компенсации обратного перемещения, которое вызывает уменьшение значений давления на выходе при перемещении иглы назад сквозь ткани.
[00107] В приведенном выше описании ручной блок содержит визуальный или звуковой индикатор 215, 220 для задания ритма скорости введения иглы. Не смотря на индикатор (индикаторы), который может быть установлен на ручном блоке, описанный выше генератор 100 визуального сигнала может использоваться для подачи визуальных сигналов для задания ритма скорости введения иглы. В частности, генератор 100 визуального сигнала может проецировать визуальный сигнал с постоянной и определенной скоростью или частотой, подобно миганиям светового индикатора 315. Поскольку генератор 100 визуального сигнала проецирует свет рядом с участком инъекции или в поле зрения участка инъекции, оператор может видеть сигнал светового индикатора для задания ритма введения иглы. Таким образом, как указано выше, игла может использоваться отдельно от остальных устройств ручного блока. В частности, игла с метками для управления скоростью ее введения может использоваться с обычным инъекционным узлом, таким как инъекционный узел 10, описанный выше. Согласно данному варианту реализации генератор визуального сигнала обеспечивает визуальные подсказки для управления скоростью введения иглы.
[00108] Поскольку цвет кожи у различных людей может различаться от пациента пациенту, желательно использовать элемент, который обеспечивает унифицированную индикацию сигналов при их проецировании на тело пациента. Например, может быть желательным прикрепить фоновый элемент, на который может проецироваться визуальный сигнал. Приведенный в качестве примера фоновый элемент может быть гибким пластырем, который может быть наложен непосредственно на кожу пациента рядом с намеченным участком введения. Пластырь может быть выполнен из любых различных гибких материалов, таких как ткань, бумага или пластик.
[00109] Пластырь имеет рабочую сторону, на которую должны проецироваться визуальные сигналы, и обратную сторону, выполненную с возможностью крепления к пациенту. Предпочтительно обратная сторона содержит подложку с адгезивом, так что пластырь может быть легко прикреплен непосредственно к коже пациента. Для адгезивной подложки может быть использован любой из различных известных адгезивов для удаляемого соединения с телом пациентом. Рабочая сторона пластыря может быть выполнена в соответствии с любым из различных шаблонов, но предпочтительно рабочая сторона имеет сплошной цвет. Кроме того, предпочтительно цвет пластыря выбирают для повышения контраста между проецируемым визуальным сигналом и пластырем. Например, если проецируемые визуальные сигналы в целом имеют темные цвета, пластырь может иметь слегка окрашенный оттенок, такой как белый или почти белый. Наоборот, если проецируемые сигналы в целом имеют светлые цвета, пластырь может иметь темный оттенок, такой как черный.
[00110] Выполненная как описано выше, адгезивная подложка пластыря может быть прижата к телу пациента для прилипания пластыря к пациенту. Предпочтительно пластырь накладывают рядом с намеченным участком введения, например, на спине пациента рядом с позвоночником. Генератор визуального сигнала направляют на пластырь, и затем генератор визуального сигнала проецирует визуальные сигналы, как описано выше.
СПОСОБ ВВЕДЕНИЯ ИНЪЕКЦИИ В ЗАПОЛНЕННОЕ ТЕКУЧЕЙ СРЕДОЙ ПРОСТРАНСТВО В ТЕЛЕ ПАЦИЕНТА
[00111] Ниже описан приведенный в качестве примера способ введения пациенту эпидуральной инъекции с использованием описанной выше системы. Разумеется, предложенная система не ограничивается использованием для введения только эпидуральных инъекций. Соответственно, следует понимать, что принципы и способы, описанные ниже, могут быть легко приспособлены для инъекций в ткани и анатомические области помимо эпидурального пространства.
[00112] Соединительные ткани тела могут создавать давления выше 200 мм рт.ст. (26,7 КПа) при введении в них текучей среды со скоростью 0,07 мл/сек. Каждая ткань имеет свои собственные характеристики плотности давления, представляемые как измеримые давления, которые могут быть выявлены в тканях данного типа. Плотность или сопротивление ткани измеряются с использованием давления текучей среды, введенной из управляемой компьютером системы для доставки лекарственного средства, выполненной с возможностью определения сопротивления давления во время инфузии. Также выявлено, что заполненные текучей средой полости, такие как эпидуральные ткани, внутрисуставное пространство или сосуды тела, имеют давления, измеренные во время инъекции, которые значительно ниже 200 мм рт.ст. (26,7 КПа). Фактически выяснилось, что заполненные текучей средой полости имеют значительно пониженное сопротивление давления потоку текучей среды и обычно имеют сопротивления давления близкие к нулю при введении в эти заполненные текучей средой тканевые участки.
[00113] Первый заданный верхний предел давления определяется лечащим врачом. Обычно первый заданный верхний предел давления составляет не более чем 200 мм рт.ст. (26,7 КПа). С использованием таких настроек инъекционная система 50 вводит незначительное количество лекарственного средства в соединительные ткани пациента и затем выбирает второе заданное давление ниже 50 мм рт.ст. (6,7 КПа), при котором возобновляется поток текучей среды. Следовательно, игла должным образом расположена в пределах заполненного текучей средой эпидурального тканевого пространства, поскольку давление в эпидуральном тканевом пространстве предположительно составляет от примерно +15 мм рт.ст. (+2 КПа) до -15 мм рт.ст. (-2 КПа), в то время как давление, присущее желтой связке (Ligamentum Flavum), составляет выше 200 мм рт.ст. (26,7 КПа).
[00114] Измеренные давления за пределами связочных тканей обычно составляют примерно 100-200 мм рт.ст. (13,3-26,6 КПа). С использованием инъекционного устройства 50, имеющего второе заданное давление, при котором возобновляется поток текучей среды, т.е. 50 мм рт.ст. (6,7 КПа) или ниже, отсутствует какой-либо значительный поток текучей среды при входе иглы в подкожные ткани, поскольку давление быстро растет и сохраняется, пока игла находится в подкожных тканях (внесвязочных тканях). Лечащий врач при введении иглы Туохи сталкивается с желтой связкой. При этом поток текучей среды не возникает, поскольку, как указано выше, желтая связка оказывает давление более чем 100 мм рт.ст. (13,3 КПа). После проникновения сквозь всю толщину желтой связки (т.е. при входе иглы в заполненное текучей средой эпидуральное пространство) давление резко понижается до значения ниже 50 мм рт.ст. (6,7 КПа), в результате чего запускается дополнительное визуальное отображающее устройство и/или возникает звуковой тон, и/или звучит голосовое сообщение, такое как "Обнаружено эпидуральное пространство". На этом этапе содержащая лекарственное средство текучая среда начнет протекать в намеченный целевой участок. Таким образом, прерывистый поток текучей среды используется для идентификации целевых тканей. Возможно, что первое и второе значения заданного давления заданы одинаковыми для обеспечения возможности возобновления потока текучей среды только после падения давления ниже заданного значения.
[00115] Датчик 20 давления или множество датчиков инъекционного устройства 50 обеспечивают автоматическую функцию безопасности в случае выхода иглы для инъекций из эпидурального тканевого пространства (например, вследствие ошибки лечащего врача или перемещения пациента), или когда возникает угроза раскрытому состоянию сосуда пациента. Если игла 24 выходит из эпидурального тканевого пространства при ее извлечении через желтую связку или контактировании с твердой мозговой оболочкой, давление немедленно поднимется до первого выбранного значения Р1, что приводит к замедлению и возможной остановке потока текучей среды при давлениях текучей среды более 200 мм рт.ст. (26,7 КПа). Было выявлено, что указанный процесс занимает примерно 2 секунды (см. Ghelber-Regional Anesthesia and Pain Medicine, том 33, №4, 2008 г., стр. 349, ФИГ. 2). При необходимости это изменение давления от <50 мм рт.ст. (<6,7 КПа) до >200 мм рт.ст. (>26,7 КПа) вновь запускает подачу оптического и/или звукового сигнала для оповещения лечащего врача о неправильном размещении иглы. Поток вновь автоматически возобновляется после возвращения иглы в эпидуральное тканевое пространство и снижения мгновенного давления на кончике иглы ниже значения Р1, или согласно еще одному варианту реализации настоящего изобретения после уменьшения давления до второго выбранного значения давления Р2, которое равно или ниже 50 мм рт.ст. (6,7 КПа). Эта автоматическая защитная функция инъекционного устройства помогает предотвратить инъекцию анестезирующего раствора в спинной мозг.
[00116] На ФИГ. 8 показан участок позвоночного столба субъекта для выполнения эпидуральной инъекции. Начиная с наружного участка инъекции для кончика иглы 24 слева на ФИГ. 8, ткани в этом участке включают различные слои кожи, жировой и соединительной тканей 110, за которыми расположено эпидуральное пространство 112, которое является интересующим анатомическим пространством согласно одному варианту реализации настоящего изобретения. За эпидуральным пространством 112 находится твердая оболочка 114 спинного мозга 116. Направленный вправо кончик иглы 24 проходит сквозь ткани, но останавливается перед достижением спинного мозга. В этом участке также в разрезе показаны кости позвоночного столба.
[00117] В данном случае микропроцессор 82 и запоминающее устройство 80 запрограммированы на использование первого давления Р1, составляющего, например, примерно 200 мм рт.ст. (26,7 КПа), которое равно или больше мгновенного давления текучей среды на кончике иглы при ее проникновении и перемещении сквозь ткань 110. При давлении Р1 или выше двигатель 96 останавливают, и поток текучей среды к кончику иглы прекращается. Когда кончик иглы проникает в эпидуральное пространство 112, мгновенное давление текучей среды падает ниже значения Р1, и микропроцессор вновь запускает двигатель для возобновления потока текучей среды теперь уже в эпидуральное пространство 112 согласно одному варианту реализации. Согласно второму варианту реализации для возобновления потока текучей среды необходимо, чтобы было достигнуто второе выбранное значение давления Р2, сохраняемое в запоминающем устройстве 80. Согласно третьему варианту реализации при достижении сохраненного в запоминающем устройстве 80 третьего выбранного значения давления Р3, которое больше чем Р2, но меньше чем Р1, поток текучей среды вновь прекращается. Достижение этого третьего давления Р3 указывает, что кончик иглы уперся в твердую оболочку 114 мозга или иным способом покинул целевое анатомическое пространство. Полости или слои, сквозь которые перемещается кончик иглы, коррелируют с настройкам давлений P1, Р2 и Р3, как показано на ФИГ. 8.
[00118] Первое выбранное давление Р1, при котором останавливают поток текучей среды, предпочтительно составляет примерно 200 мм рт.ст. (26,7 КПа) для эпидуральной инъекции, но может находиться в диапазоне от примерно 25 мм рт.ст. (3,3 КПа) до примерно 300 мм рт.ст. (40,0 КПа) в зависимости от ткани, которую кончик иглы прокалывает в первую очередь. Давление Р2, при котором возобновляют поток текучей среды, предпочтительно составляет примерно 50 мм рт.ст. (6,7 КПа) для эпидуральной инъекции, но может находиться в диапазоне от примерно 20 мм рт.ст. (2,7 КПа) до примерно 150 мм рт.ст. (20,0 КПа) в зависимости от интересующего анатомического пространства. Третье выбранное давление Р3, при котором вновь останавливают поток текучей среды, предпочтительно составляет примерно 125 мм рт.ст. (16,7 КПа) для эпидуральной инъекции, но может находиться в диапазоне от примерно 80 мм рт.ст. (10,7 КПа) до примерно 180 мм рт.ст. (24,0 КПа) в зависимости от интересующего анатомического пространства. Использование трех заданных значений давления улучшает управление включением/выключением потока, когда кончик иглы перемещается сквозь ткани различных видов, для любого заполненного текучей средой анатомического пространства, способного принимать текучую среду при низком давлении, в отличие от тканей, окружающих данное анатомическое пространство.
[00119] Предполагается, что для идентификации эпидурального тканевого пространства во время фазы размещения иглы в процедуре эпидуральной инъекции используется среда, не содержащая фармацевтический препарат. Подходящие не содержащие фармацевтический препарат текучие среды включают в себя, например, стерильный физиологический раствор, искусственную мозговую цереброспинальную жидкость, растворы Рингера, 5% раствор декстрозы или отфильтрованный воздух. После идентификации эпидурального пространства ткани с использованием перепада давлений инъекционную текучую среду заменяют на содержащую фармацевтический препарат текучую среду. Использование не содержащей фармацевтический препарат текучей среды во время фазы размещения иглы позволяет минимизировать или предотвратить введение фармацевтических средств в нецелевые ткани.
[00120] Еще одним признаком предложенных устройства и способа является объективная природа давления, измеренного компьютеро-управляемым устройством для доставки лекарственного средства, которое отслеживает давление во время всех фаз процесса инъекции. Таким образом, лечащий врач больше не полагается на субъективные "ощущения", а получает объективную информацию об абсолютных значениях во время выполнения каждой фазы этой рискованной операции. Каждая фаза способа усовершенствована за счет способности непрерывно отслеживать давление с одновременным использованием прерывистого потока текучей среды с лекарственным средством, благодаря чему обеспечена возможность выполнения регулировок, повышающих безопасность и эффективность инъекции.
[00121] Согласно еще одному варианту реализации лечащий врач может сбросить заданное максимальное допустимое давление после проникновения иглы в заполненное текучей средой пространство и начала инъекции. Как указано выше, до проникновения иглы в эпидуральное пространство давление текучей среды составляет больше чем 200 мм рт.ст. (26,7 КПа), в результате чего доставляется лишь небольшое количество текучей среды, или текучая среда не доставляется вообще. После проникновения иглы в заполненное текучей средой пространство давление уменьшается до значений ниже нуля и постепенно поднимается до значений примерно 1-10 мм рт.ст. (133,3-1333 Па). Это понижение давления инициирует поток текучей среды из инъекционного устройства. На этом этапе максимальное заданное значение давления может быть изменено на новое, пониженное максимальное. Например, заданное максимальное давление, при котором поток текучей среды прекращается, может быть уменьшено до 25 мм рт.ст. (3,3 КПа), что обеспечивает дополнительный уровень безопасности пациента в случае контакта иглы для инъекций с твердой мозговой оболочкой или выведения иглы из эпидурального пространства. Новое заданное пониженное максимальное давление приводит к более раннему прекращению потока текучей среды и при уменьшенном эктопическом объеме инъекции по сравнению с исходным заданным значением. Изменение заданного максимального давления, останавливающего поток текучей среды, может быть выполнено вручную лечащим врачом или автоматически посредством управляющего элемента в инъекционном устройстве.
[00122] Следует понимать, что значение 200 мм рт.ст. (26,7 КПа) в качестве предварительно определенного максимального заданного давления для остановки потока текучей среды является только примером, и может быть выбрано более низкое или более высокое заданное давление по усмотрению лечащего врача. Кроме того, значение второго заданного давления, составляющего 50 мм рт.ст. (6,7 КПа), при котором возобновляется поток текучей среды, приведено только в качестве примера и является просто иллюстративным, так что может быть выбрано более низкое или более высокое заданное давление по усмотрению лечащего врача. Предложенные принципы и способы могут быть модифицированы для инъекции почти в любую анатомическую область. Особое значение в этом варианте реализации способа и устройства согласно настоящему изобретению имеет возможность определять и выбирать заданные значения давления для генерации прерывистого потока лекарственного средства для диагностического и терапевтического введений лекарственных средств.
[00123] Описанные в настоящей заявке способы одинаково подходят для инъекций в ткани человека и животных.
[00124] На ФИГ. 5-6 схематически представлена диаграмма расположения инструментальных средств и электронных компонентов. Как показано на ФИГ. 5, генератор 100 визуального сигнала может быть соединен с центральным процессором 80 исполняющего блока 50. В частности, как описано выше, центральный процессор 80 может содержать отдельную схему управления светом, которая выполнена с возможностью управления осветительными элементами генератора 100 визуального сигнала. В частности, схема управления светом может принимать сигналы от центрального процессора или других элементов исполняющего блока и может управлять осветительными элементами в ответ на принятый сигнал.
[00125] ФИГ. 6 показывает альтернативную блок-схему системы, показанной на ФИГ. 5. Как показано на ФИГ. 6, генератор 100 визуального сигнала соединен с экраном 62 отображающего устройства исполняющего блока 50. В частности, генератор 100 визуального сигнала может быть соединен с концентратором USB, расположенным на отображающем устройстве. Согласно данному варианту реализации генератор 100 визуального сигнала содержит схему управления светом, выполненную с возможностью приема сигналов от отображающего устройства и управления светом для обеспечения необходимой визуальной обратной связи, как описано выше. Например, генератор 100 визуального сигнала может быть выполнен с возможностью работы в качестве дистанционного проекционного экрана, на который может быть спроецировано любое изображение, показанное на экране 62 отображающего устройства.
[00126] ФИГ. 9 показывает исполняющий блок с прикрепленным источником 100 света, проецирующим световое изображение на целевую поверхность тела пациента и участок, на котором игла введена в тело пациента. Свет сообщает, что игла обнаружила заполненную текучей средой полость, изменением своего цвета, проецируемого на поверхность тела пациента.
[00127] Использование излученного света, проецируемого на поверхность тела пациента, обеспечивает множество преимуществ, которые не могут быть реализованы другими механизмами. В частности, светоизлучающий элемент, выполненный с возможностью излучения света с различными цветами и/или шаблонами, обеспечивает:
(i) механизм, выполненный с возможностью объективного представления одного или более конкретных пороговых значений давления, которые не могут быть переданы непрерывным акустическим тоном;
(ii) механизм, предназначенный для эффективного уведомления оператора, когда давление поднимается или снижается, без субъективной интерпретации путем изменения цветов и/или шаблонов света, которые объективно распознаются визуально как различимые индикаторы;
(iii) механизм, обеспечивающий возможность для оператора сосредоточить свое поле зрения на участке лечения, и, в частности, механизм, при котором просмотр дистанционного экрана отображающего устройства не требует подтверждения звуковым тоном или другим сигналом;
(iv) недорогой механизм для передачи информацию без необходимости использования экрана дистанционного отображающего устройства или вспомогательного оборудования;
(v) механизм, который устраняет ограничения акустической обратной связи в операционной, в которой присутствуют множество конкурирующих звуков и отслеживающих устройств, которые могут отвлекать внимание оператора и приводить к медицинским ошибкам; и
(vi) механизм, не испускающий звуков, которые пациент может интерпретировать как повод для беспокойства во время выполнения процедуры.
СПОСОБ ЭПИДУРАЛЬНОГО ВВЕДЕНИЯ
[00128] Вид сверху инструмента показывает утопленную полость 52 и выемку 56, вместе называемые гнездом для шприца, которое обеспечивает возможность приема исполняющим блоком 50 стандартного шприца 18 емкостью 20 куб.см. В выемке 56 для поршня расположена выполненная с возможностью перемещения арматура 90 и платформа 58, которые взаимодействуют с упором для большого пальца или фланцем 72 шприца 18 одноразового применения. Механизм, который взаимодействует с упором шприца для большого пальца, имеет несколько подпружиненных крючков 60, показанных на ФИГ. 1, которые автоматически захватывают упор шприца для большого пальца.
[00129] Как показано на ФИГ. 1, для зацепления упора 72 шприца для большого пальца подпружиненные крючки 60 перемещаются в наружном направлении поверх упора 72 шприца и затем взаимодействуют с упором шприца крюкообразным способом. В результате этого действия упор шприца фиксируется, как показано на ФИГ. 1, обеспечивая возможность механического перемещения платформой 58 поршня 70 шприца в любом направлении для выполнения аспирации. Кроме того, в конструкцию арматуры 90 для шприца встроен тензодатчик. Арматура 90 использует оптические и механические средства для идентификации положения шприца и обеспечивает возможность вычисления объема текучей среды в шприце.
[00130] Этап 1: Электропитание исполняющего блока 50 включается соответствующей кнопкой на отдельной боковой панели 64, как показано на ФИГ. 5, которая содержит кнопки "Вкл/Выкл", "Старт/Стоп", "Чистка" и "Аспирация Вкл/Выкл", а также индикаторы батареи. Кнопка "Вкл/Выкл" включает электропитание исполняющего блока и интерфейса сенсорного экрана ЖК дисплея 62. При включении питания механизм арматуры 90 для шприца автоматически перемещается в исходное положение, как показано на ФИГ. 1.
[00131] На ФИГ. 1 арматура 90 с подвижной платформой 58 с приемным гнездом 52, 56 для упора шприца для автоматического взаимодействия при аспирации соединена с подвижной арматурой для шприца, расположенной на верхней части исполняющего блока.
[00132] Верхняя часть исполняющего блока имеет гнездо для шприца, которое содержит стопоры или зажимы 54, расположенные на его поверхности. Эти стопоры 54 взаимодействуют с поверхностью цилиндра шприца 18, когда шприц размещен в гнезде, для создания взаимного соединения между шприцем и гнездом.
[00133] Этап 2: В исполняющем блоке 50 используется одноразовый инъекционный узел 10, показанный на ФИГ. 3, который содержит следующие системные компоненты.
[00134] Шприц 18: согласно предпочтительному варианту реализации в данном случае используется стандартный шприц объемом 20 куб.см от компании Becton Dickinson, Inc. Конструкция не ограничивается конкретным размером или объемом шприца. Оператор загружает шприц текучей средой из соответствующей стерильной емкости, такой как многодозовый флакон с лекарственным средством или одноразовая стеклянная ампула. Оператор может загрузить шприц полностью или загрузить шприц частично, поскольку средство для автообнаружения определяет объем текучей среды, находящейся в шприце.
[00135] Согласно предпочтительному варианту реализации используется поточный датчик 20 давления, такой как поточный датчик давления марки Meritrans® от компании Merit Medical, Саут-Джордан, Юта. Предполагается, что тензодатчик в арматуре шприца может обеспечивать информацию, соответствующую давлению текучей среды, и устраняет необходимость использования вторичного датчика давления.
[00136] Подкожная полая игла 24 может быть иглой Туохи, такой как игла Туохи типа 20Gx3,5" от компании Becton Dickinson, Франклин Лейке, Нью-Джерси. Стерильный набор трубок представляет собой трубки для измерения артериального давления типа 22-48", такие как стерильная трубка от компании ICU Medical, Inc., Сан Клементе, Калифорния.
[00137] В качестве идентифицирующего соединителя 12 могут быть использованы любые средства для передачи и сообщения центральному процессору исполняющего блока, включая помимо прочего инфракрасное излучение, Wi-Fi, Blue Tooth или другие беспроводные средства. Верификация одноразового узла также может быть реализована с использованием автоматизированной маркировки или разметки, такой как нанесение штрихового кода на инъекционный узел 10, и использованием считывающего штрих-кодового устройства для сканирования штрихового кода. Штриховой код может содержать элемент, который действует в качестве ключа, так что когда система принимает сканограмму штрихового кода соответствующего инъекционного узла, она открывает исполняющий блок 50 для использования. Идентифицирующий соединитель 12 обменивается данными с центральным процессором 80 исполняющего блока для предоставления информации, относящейся к одноразовому инъекционному узлу 10.
[00138] Предполагается, что в идентифицирующем соединителе 12 может быть закодирована дополнительная информация, такая как помимо прочего: информация о лекарственном средстве, такая как название и рецептура лекарственного средства, изготовитель лекарственного средства, номер партии; информация, относящаяся к утилизации расходных материалов; информация, относящаяся к истечению срока действия лекарственного средства; информация, относящаяся к стерильности одноразового комплекта; а также дата и время использования идентифицирующего соединителя.
[00139] Согласно предпочтительному варианту реализации шприц 18 объемом 20 куб.см соединен с датчиком 20 давления модели Meritans с прикрепленным идентифицирующим соединителем 12 и набором 22 48-дюймовых трубок для измерения артериального давления. В дистальном конце набора трубок присоединена игла 24 Туохи (полая), как показано на ФИГ. 1, 2 и 7.
[00140] Этап 3: После установки шприца 18 в приемник для шприца, оператор просматривает начальный экран 62 с сообщением "Загрузите шприц и нажмите кнопку "Продолжить"". Интерфейс 62 сенсорного экрана позволяет оператору нажать на кнопку "Продолжить", в результате чего происходит автоматическое зацепление приемника аспирации с упором шприца для большого пальца руки.
[00141] Этап 4: Оператор вводит иглу в тело пациента в целевом участке. Когда оператор продвигает иглу, система определяет давление обратной связи в игле, и генератор визуального сигнала проецирует сигнал на основании определенного давления. Визуальный сигнал изменяется, поскольку изменяется определяемое давление. Оператор продолжает продвигать иглу, используя визуальные сигналы от генератора визуального сигнала для направления введения иглы.
[00142] В приведенном выше примере обратная связь от генератора визуального сигнала основана на обнаруженном давлении. Однако, как указано выше, давление зависит от расхода текучей среды, вытекающей из шприца. Соответственно, следует понимать, что сигнал от генератора визуального сигнала может быть по меньшей мере частично основан на расходе текучей среды, вытекающей из шприца в тело пациента.
[00143] Функция автоматического обнаружения шприца использует удерживающие крючки приемного гнезда аспирации с автоматическим зацеплением для подтверждения выбора шприца надлежащего размера. Подтверждение устанавливают на основании размера упора шприца для большого пальца и диаметра между крючками приемного гнезда аспирации с автоматическим зацеплением. Если размер шприца и размер приемного гнезда не соответствуют друг другу, крючки не входят в зацепление. Загруженный шприц первоначально обнаруживают датчиком нагрузки, содержащимся в арматуре шприца исполняющего блока. Перемещение арматуры шприца вперед автоматически останавливается при обнаружении сопротивления на упоре шприца для большого пальца руки. Затем арматура шприца меняет направление перемещения на противоположное после того, как подпружиненные крючки входят в зацепление с упором для большого пальца шприца. Если используется упор уменьшенного диаметра для шприца, размер которого отличается от размера шприца объемом 20 куб. см, зацепляющие крючки не входят в зацепление, так что шприц не обнаруживается. В ответ на не обнаруживаемый шприц система показывает предупреждающее сообщение или подает соответствующий сигнал, и дальнейшее использование исполняющего блока прекращается. Например, световой узел 100 может испустить быструю вспышку светового красного предупреждающего сигнала, предлагающую оператору устранить проблему с инъекционным узлом.
[00144] Функция автоматического обнаружения шприца использует оптический и/или механический датчик для обнаружения признаков шприца для определения таким образом объема текучей среды в шприце. Обнаруженный объем отображается на дисплее. После завершения и подтверждения обнаружения шприца, система может автоматически промыть набор трубок соответствующим объемом текучей среды для полной зарядки одноразового инъекционного узла 10.
[00145] В свете вышесказанного и как показано на ФИГ. 11, ниже описан приведенный в качестве примера способ использования, который включает в себя использование функций генератора 100 визуального сигнала и разметки 344 иглы наряду с встречным давлением для вычисления давление на выходе. Приведенное ниже описание относится к эпидуральной процедуре, но следует понимать, что данный способ также может быть применен к другим процессам, таким как процедура блокады периферических нервов, в которой отслеживается давление текучей среды в игле.
[00146] Предварительно оператор приготавливает инструмент, вводит различные параметры на основании сведений о пациенте и подробностях процедуры. В настоящем примере используется ручной блок 300, содержащий эпидуральную иглу. Игла имеет метки, расположенные на определенных расстояниях друг от друга, такие как секции длиной 1 см, цвет которых чередуется между серебряным и черным. Оператор присоединяет одноразовую трубку 22 и датчик 20 давления к шприцу 18. Затем генератор 100 визуального сигнала направляют на пациента таким образом, чтобы генератор визуального сигнала проецировал световой пучок на пациента рядом с целевым участком инъекции. Данные, которые оператор вводит в систему, задают необходимую скорость введения иглы, которая также определяет встречное противодавление, которое станет частью вычисления, когда система будет определять давление на выходе.
[00147] Инструмент 50 для доставки лекарственного средства начинает работать, и свет излучается генератором 100 визуального сигнала. Согласно данному варианту реализации излучается мигающий свет для подачи визуального указания относительно того, как быстро оператор должен продвигать иглу от одной метки 344 на игле к следующей. Например, генератор 100 визуального сигнала проецирует "зеленый" свет на поверхность тела пациента в течение 2 секунд, и в этот 2-секундный период оператор должен медленно продвигать иглу к следующей метке на игле у поверхности кожи пациента. Затем светоизлучающий источник переключается на "черный" цвет на очень короткий период времени (0,1 сек). Когда свет вновь переключится на "зеленый" в течение следующих двух секунд, оператор должен продвинуть иглу на следующее расстояние, определенное метками 344 на игле.
[00148] Оператор продолжает продвигать иглу в ткань тела пациента в определенном темпе, которым управляет шаблон мигания. Этот шаблон 2-секундного зеленого излучаемого света, сопровождаемого коротким промежутком отсутствия света, продолжается, пока давление повышается отточки "А" к точке "В" на графике, показанном на ФИГ. 11.
[00149] При повышении давления между точками "А" и "В" значение встречного давления включают в алгоритм для регулировки значение давления на выходе, показываемое на экране. Во время этого периода давление поднимается с миганием зеленого света.
[00150] Визуальное указание, состоящее в мигании зеленого света с определенной частотой, оповещает пользователя о двух аспектах системы: 1) Игла должна вводиться в конкретном темпе введения иглы путем координирования темпа проникновения в кожу (что в свою очередь обеспечивает инструмент постоянным известным значением встречного давления); 2) Оно оповещает оператора о том, что давление возрастает от 0 мм рт.ст. (0 КПа) до 100 мм рт.ст. (13,3 КПа) согласно данному варианту реализации. Во время этого периода исполняющий блок может выпускать текучую среду из шприца через иглу.
[00151] Оператор продолжает продвигать иглу в тело пациента к целевому слою, которым согласно данному варианту реализации является желтая связка, при выполнении эпидуральной инъекции.
[00152] Когда давление достигает точки "В", как показано на ФИГ. 11, двигатель исполняющего блока 50 останавливается, поскольку давление текучей среды достигло предварительно заданного предела давления, который был предварительно определен. Когда двигатель останавливается, исполняющий блок больше не вытесняет лекарственное средство из шприца. При достижении давлением этого предварительно заданного значения инструмент прекращает подачу индикации темпа введения иглы путем мигания излучаемого света.
[00153] Это значение в случае необходимости может быть изменено оператором (в данном случае оно составляет 100 мм рт.ст. (13,3 КПа)).
[00154] При достижении точки "В" обеспечивается специальное излученное визуальное оповещение. Для него могут быть использованы различные цвета; согласно данному варианту реализации в данном случае излучается белый свет. Этот свет может быть постоянным или мигающим для оповещения, что достигнуто максимальное давление.
[00155] Не смотря на то, что между точкой "В" и "С" давление некоторое время сохраняет значение 100 мм рт.ст. (13,3 КПа), дополнительная визуальная информация, относящаяся к перемещению иглы, отсутствует. Оператор в случае необходимости может наблюдать на экране, что значение давления составляет 100 мм рт.ст. (13,3 КПа).
[00156] Оператор продолжает продвигать иглу таким образом, чтобы кончик иглы в точке "С" вошел в эпидуральное пространство. Возникает понижение давления, поскольку игла введена в эпидуральное пространство, и двигатель исполняющего блока 50 начинает смещать поршень, таким образом вытесняя лекарственное средство из шприца. Тем не менее, давление уменьшается в период времени между точками "С" и "D". Светоизлучающий источник испускает мигающий красный свет, указывающий, что давление падает.
[00157] В точке "D" давление достигает точки перегиба и вновь начинает увеличиваться. Начиная с точки "D", излучаемый свет изменяется между точками "D" и "Е" и теперь представлен мигающим зеленым светом, который мигает в заданном 1-секундном темпе, отличающемся от темпа введения иглы на участке между точками "А" и "В".
[00158] В точке "Е" перегиба давление опять начинает уменьшаться, и в этой точке генератор опять изменяет визуальный сигнал на мигающий красный свет до определения заданного дискретного значения давления в точке "F".
[00159] После достижения точки "F" и падения давления ниже 40 мм рт.ст. (5,3 КПа) излучается постоянный красный цвет между точками "F" и "G", указывающий, что значение давления на выходе составляет от 40 мм рт.ст. (5,3 КПа) до 20 мм рт.ст. (2,7 КПа).
[00160] После прохождения точки "G" давление спадает до значения 20 мм рт.ст. (2,7 КПа), и излучается сплошной синий свет, указывающий на то, что давление достигло минимального значения, и давление на выходе находится в диапазоне от 20 мм рт.ст. (2,7 КПа) до 0 мм рт.ст. (0,0 КПа).
[00161] В этот момент идентификация эпидурального пространства подтверждается оператором, и использование инструмента завершается.
ИНФУЗИОННАЯ СИСТЕМА С ЭЛЕКТРОСТИМУЛЯЦИЕЙ
[00162] Как показано на ФИГ. 10 и 13, система для инфузии лекарственного средства, которая содержит элементы электростимуляции, обозначена как 405. Система 405 выполнена с возможностью использования в различных процедурах, таких как блокада периферического нерва. Система 405 содержит множество элементов, которые являются теми же элементами, как и элементы, описанные выше в связи с системой, обозначенной позиционным номером 5, или подобными элементами. Соответственно, элементы в системе 405, которые по существу подобны элементам в системе 5, имеют те же ссылочные номера.
[00163] Система 405 содержит инъекционный узел 410 и управляемый компьютером инструмент 450 для доставки лекарственного средства, подобный инъекционному узлу 10, и описанный выше исполняющий блок 50. Инъекционный узел 410 содержит вводную иглу 340 и соединен с исполняющим блоком 450, который во время использования управляет потоком текучей среды к инъекционному узлу. Система 405 также содержит одно или более устройств вывода, которые обеспечивают данные для врача-специалиста во время процедуры, облегчающие надлежащее размещение иглы в теле субъекта.
[00164] Система 405 выполнена с возможностью определения местоположения для интрафасцикулярного расположения иглы. Система также выполнена с возможностью доставки терапевтического лекарственного средства в интрафасцикулярное местоположение иглы. Лекарственное средство может содержать помимо прочего локальные анестезирующие растворы, такие как кортикостероиды, гидроксиапатит, объединенные восстанавливающие препараты, склерозирующие агенты и другие лекарственные средства, которые в терапевтических целях обычно вводят в заполненное текучей средой тканевое пространство.
[00165] Интрафасцикулярным положением иглы является положение, в котором кончик иглы проникает через периневрий таким образом, что кончик иглы расположен внутри нервного пучка. Экстрафасцикулярным положением иглы является положение, в котором игла находится в любом месте снаружи периневрия индивидуального нервного пучка, который может содержать наружный эпиневрий или даже параневрий, таким образом определенное как полностью экстраневральное.
[00166] Нерву может быть нанесено необратимое повреждение, если кончик иглы проникает в пучок нервов, и затем текучая среда под гидростатическим давлением вызывает изменения в невральных и сосудистых тканях в пучке нервов. Это возникает по причине того, что наружный слой нервного пучка представляет собой защитный слой относительно неподатливой жесткой защитной структуры. Он защищает основные компоненты нерва, т.е. аксоны, которые плотно упакованы в пучке. Иными словами, пучок нервов представляет собой плотно упакованное образование с утолщенной защитной оболочкой. Пучок нервов не легко деформируется при растяжении или сжатии. Таким образом, склонность ткани к всасыванию текучих сред является чрезвычайно низкой и/или незначительной. Проникновение иглы в пучок нервов не обязательно вызывает окончательное повреждение участков аксона, но объединенный эффект проникновения иглы и увеличенного давления внутри нервного пучка, вызванного инфузией текучих сред в пучок, может привести к повреждению капиллярного русла. Кроме того, индуцированная давлением текучей среды странгуляция микроциркуляции аксонов препятствует немедленной подаче питательных веществ после такой физической травмы, что приводит к начальному некрозу. Кумулятивный эффект от некроза приводит к воспалительной реакции в попытках инициировать заживление ран от начальной индуцированной давлением травмы, которая продолжает расширяться или накапливаться до потенциально необратимого повреждения.
[00167] Однако в некоторых случаях намеренное интрафасцикулярное размещение иглы является желательным и необходимым. Такие случаи включают неустранимую фантомную боль после ампутации конечности. Кроме того, гиперактивная невральная стимуляция конкретной конечности иногда может приводить к устранимой боли и является другим обстоятельством, при котором требуется намеренное интрафасцикулярное расположение иглы и доставка лекарственных агентов. Соответственно, система 405 и ее использование обеспечивает способ и устройство для эффективного различения между экстрафасцикулярным и интрафасцикулярным расположением иглы.
[00168] Введенная текучая среда рассасывается через ткань с различными скоростями. В результате давление текучей среды изменяется. Таким образом, давление текучей среды (или внутреннее давление, относящееся к давлению сопротивления ткани) является указателем и может быть использовано для идентификации различных типов тканей.
[00169] Система 405 обеспечивает возможность для лечащего врача точно идентифицировать заполненное текучей средой тканевое пространство с одновременным ограничением введения лекарственных средств в нецелевые ткани. Это относится как к диагностическим, так и к терапевтическим процедурам. Система 405 использует давление текучей среды, вытекающей из иглы или катетера после размещения иглы/катетера в ткани, для идентификации точности размещения и мониторинга размещения во время инъекции или аспирации.
[00170] В частности, система 405 содержит одно или более устройств вывода для обеспечения звуковой и/или визуальной обратной связи относительно обнаруженного давления текучей среды во вводной игле. Оператор использует визуальную обратную связь для наведения во время размещения вводной иглы. Как показано на ФИГ. 13, первое устройство вывода может быть экраном отображающего устройства, такого как отображающее устройство на основе ЖК дисплея, для показа данных, помогающих оператору. Кроме того, также может быть обеспечено второе устройство вывода. Например, второе устройство вывода может быть громкоговорителем для выдачи выходного звукового сигнала.
[00171] Система 405 содержит инъекционный узел 410, который содержит шприц 18 и достаточно длинный отрезок гибкой трубки 22, имеющей первый конец, соединенный с шприцем, и вводную иглу 340, соединенную с вторым концом. Таким образом, текучая среда из шприца может вытесняться через трубку 22 в иглу 24. Инъекционный узел 410 также содержит датчик давления для определения давления текучей среды в инъекционном узле. Датчик давления может быть расположен в одном из различных мест для измерения давления, которое коррелирует с давлением текучей среды в кончике иглы 340. В данном случае датчиком 20 давления является встроенный датчик давления текучей среды, прикрепленный к шприцу 18 между шприцем и трубкой 22. Таким образом, датчик 20 давления распознает давление текучей среды, когда текучая среда выходит из шприца и входит в трубку 22, с которой соединена вводная игла 340.
[00172] Инъекционный узел 410 также может содержать ручной блок 300 многократного использования, к которому прикреплена игла. Как показано на ФИГ. 10, вводная игла 340 соединена с передним концом ручного блока, и трубка 22 соединена с задним концом ручного блока. Ручной блок 300 может содержать средства, которые помогают оператору во время процесса введения, как подробно описано ниже. Кроме того, ручной блок 300 может быть выполнен с возможностью обеспечения электростимуляции, как подробно описано ниже.
[00173] Инъекционным узлом можно управлять вручную для введения текучей среды. Однако в данном случае потоком текучей среды из инъекционного узла управляет управляемая компьютером система 450 доставки лекарственного средства, как подробно описано ниже. Выходной кабель 21 соединяет датчик 20 давления с системой 450 доставки лекарственного средства, так что система доставки лекарственного средства может отслеживать и в случае необходимости изменять поток текучей среды из шприца в ответ на данные от датчика 20 давления. Датчик 20 давления может быть соединен последовательным встраиванием между передним концом цилиндра шприца 18 и первым концом трубки 22. Одним приведенным в качестве примера соединением является люэровское соединение датчика 20 давления с кончиком шприца. Соединение может быть резьбовым соединением и/или необратимым резьбовым соединением, таким как соединение типа LuerLok. Согласно еще одному варианту реализации преобразователь 20 давления может быть постоянно прикреплен к шприцу сваркой в пластическом состоянии или химическим связыванием, таким как посредством адгезива. Таким образом, мгновенное действующее давление текучей среды в линии 22 для доставки лекарственного средства распознается и используется в соответствии с инструментом, обеспечивая таким образом близкое приближение к действующему мгновенному давлению текучей среды в точке или кончике иглы 340 и, таким образом, в местоположении в теле пациента, где расположен кончик иглы. Электронный датчик 20 давления обеспечивает данные о давлении через кабели для электронных данных, которые соединены непосредственно с центральным блоком 50, для сбора результатов измерения давления.
[00174] Как описано выше, система 405 может содержать систему 50 доставки текучей среды для обеспечения управляемого потока лекарственного средства к инъекционному узлу 10. Предпочтительно система доставки текучей среды является автоматизированной системой и в данном случае является управляемой компьютером системой доставки текучей среды, которая называется исполняющим блоком 450, который действует подобно исполняющему блоку 50, описанному выше, если в приведенном ниже описании не указано иное.
ЭЛЕКТРОСТИМУЛЯЦИЯ
[00175] Система 405 также может содержать элемент 334 электростимуляции, обеспечивающий электрические нервные стимулы для целевой ткани в теле пациента. Элементом электростимуляции является токопроводящий элемент, соединенный с ручным блоком 300. Элемент электростимуляции выполнен с возможностью выдачи электрического разряда низкой интенсивности (т.е. от приблизительно 0,15 мА до приблизительно 2,0 мА) и краткой длительности (т.е. импульсы длительностью приблизительно от 0,1 мс до 1 мс). Электронные стимулирующие элементы обеспечивают стимулы в течение короткого времени (т.е. в течение приблизительно 1-10 секунд).
[00176] Электрический стимулятор может быть внешним элементом или внутренним элементом. Например, на ФИГ. 10 и 13 показан один вариант реализации, который содержит внешние электрические стимуляторы. Проводящий элемент 334, такой как токопроводящий кабель, соединяющий ручной блок 300 с генератором 335 стимулов, так что электрические стимулы могут быть переданы от генератора стимулов ручному блоку. В свою очередь, ручной блок соединен с элементом, выполненным с возможностью доставки электрического разряда в ткань. Например, игла 340 может быть выполнена из то ко про водящего материала, и ручной блок может содержать соединение с иглой, обеспечивающее путь для электрического тока от проводящего элемента и иглы. Согласно еще одному варианту реализации проводящий элемент, такой как провод, может проходить вдоль иглы, и игла может быть электрически изолирована от провода. Например, игла может быть выполнена из электрически изолирующего материала. Примером внешнего электрического стимулирующего элемента является изолированная игла, продаваемая под торговой маркой "Stimuplex®", или также игольчатый катетер, продаваемый под торговой маркой "Contiplex®C" компанией В. Braun Medical Inc., Вифлеем, Пенсильвания.
[00177] Согласно еще одному варианту реализации система может использовать внутренние электрические стимулы. Например, текучая среда, введенная из шприца, может быть ионным раствором, проводящим электрические стимулы. Проводящий элемент может контактировать с текучей средой в изолированной игле. Игла может быть может быть выполнена из различных непроводящих материалов. Например, проводящий элемент может проходить на пути текучей среды в некоторой точке между шприцем 18 и иглой 340. Например, проводящий элемент может передавать электрические стимулы в текучую среду в заднем конце ручного блока 300. Если электрические стимулы передаются ткани через текучую среду, игла 340 может быть электрически изолирована для минимизации любой утечки или потери электрического заряда через боковые стенки иглы.
[00178] Элемент электростимуляции соединен с генератором 335 электрических стимулов, который является электрическим источником, выполненным с возможностью передачи электрического разряда или импульса стимулирующему элементу. Генератор стимулов может быть размещен в исполняющем блоке 450, как показано на ФИГ. 13. При таком расположении генератор 335 стимулов соединен с центральным процессором исполняющего блока таким образом, что центральный процессор обеспечивает электрические сигналы для управления работой генератора стимулов. Согласно еще одному варианту реализации генератор стимулов может быть отдельным элементом, имеющим отдельный источник энергии и отдельное управление.
[00179] Система 405 также может содержать управляемое пользователем устройство 470 ввода, которое предоставляет оператору возможность обеспечивать входной сигнал для управления системой. Устройство ввода может быть любым из различных устройств, таких как устройство ручного или ножного управления, которое обеспечивает средство для оператора, позволяющее начинать и останавливать ввод лекарственного средства и изменять скорость ввода лекарственного средства от одной скорости ввода лекарственного средства до второй или третьей отличающейся заданной скорости ввода лекарственного средства. Согласно еще одному варианту реализации устройство ввода может быть кнопкой, сенсорным экраном, мышью, клавиатурой или микрофоном для выдачи команд ввода в звуковой форме. Кроме того, система может содержать множество устройств ввода для обеспечения возможности оператору вводить множество вводных данных для различных этапов процедуры. Например, система может содержать первое устройство ввода, такое как ножная педаль, которая управляет потоком текучей среды через устройство. Активация ножного педального регулятора (т.е. нажатие переключателя) передает сигнал центральному процессору исполняющего блока, который в свою очередь передает сигнал двигателю для приведения его в действие таким образом, чтобы текучая среда протекала из шприца в иглу 340 при активировании педали. Согласно еще одному варианту реализации нажатие ножной педали в первый момент времени может управлять стартовым сигналом для начала протекания текучей среды, и текучая среда может продолжать протекать, пока оператор вновь не нажмет ножную педаль. Таким образом, второе нажатие действует в качестве останавливающего сигнала для прекращения потока текучей среды. Кроме того, система может содержать второе устройство ввода, такое как сенсорный экран, чтобы при применении электростимуляции к пациенту оператор мог ввести указание относительно того, была ли выявлена конвульсия мышцы, или пациент заметил соответствующее ощущение. Кроме того, первичное или вторичное устройство ввода может управляться кнопкой, такой как кнопка 325 на ручном блоке. Активация управляющей кнопки 325 может передавать сигнал центральному процессору для обеспечения ответного ввода во время процедуры.
[00180] Как описано выше, давление текучей среды используется для управления работой системы 5. Подобным образом, давление текучей среды используется для управления работой системы 405 блокады периферического нерва. Например, система 405 может обеспечивать сигнал оператору, если давление текучей среды превышает пороговой значение, таким образом указывая, что игла может быть расположена интрафасцикулярно. Как описано выше, имеются различные способы вычисления давления текучей среды на выходе из иглы.
СПОСОБ РАБОТЫ СИСТЕМЫ, СОДЕРЖАЩЕЙ ЭЛЕКТРОСТИМУЛЯЦИЮ
[00181] Ниже описан приведенный в качестве примера способ введения пациенту эпидуральной инъекции с использованием описанной выше системы. Следует понимать, что настоящая система не ограничивается использованием только в процедурах блокады периферического нерва. Соответственно, следует понимать, что принципы и способы, описанные ниже, могут быть легко реализованы для инъекций в ткани и анатомические области в различных случаях применения и процедурах.
[00182] Система может использоваться для определения, расположена ли игла в пучке нервов (т.е. расположена ли интрафасцикулярно). Система выполняет определение на основании объединения нескольких переменных. Во-первых, если игла проколола эндоневрий, давление текучей среды будет весьма высоким, поскольку аксоны плотно упакованы в эндоневрий. Кроме того, если игла проколола эндоневрий, оператор, вероятно, будет наблюдать заметную реакцию на электростимуляцию, примененную к пациенту в области кончика иглы или рядом с ней. Таким образом, если оператор получает извещение о высоком давлении текучей среды и затем применяет электростимуляцию и замечает реакцию, вероятно, что игла расположена интрафасцикулярно, и, таким образом, ее следует расположить заново. Итак, система может работать следующим образом.
[00183] Как показано на ФИГ. 14, на этапе 500 оператор выбирает параметры процедуры, такие как верхнее пороговое значение и/или расход текучей среды, и/или скорость продвижения иглы. Например, оператор может задать верхнее пороговое давление, такое как 300 мм рт.ст. (40,0 КПа). Согласно еще одному варианту реализации верхнее пороговое значение может быть задано в системе, когда оператор выбирает тип процедуры, для которой должна использоваться данная система. Подобным образом, оператор может выбрать расход текучей среды через иглу, или расход может быть установлен автоматически, когда оператор выбирает тип процедуры. Кроме того, оператор может выбрать продолжительность электрической стимуляции нерва во время ее применения. После выбора параметров процедуры оператор обеспечивает указание, что процедуру следует начать. Например, оператор может нажать кнопку "Старт" на исполняющем блоке.
[00184] На этапе 510 оператор продвигает иглу в тело пациента. Как описано выше, иглу можно продвигать с любой из различных скоростей введения, таких как 3-10 мм/сек. Предпочтительно иглу водят по существу с постоянной скоростью. Соответственно, на этапе 510 оператор может вводить иглу с постоянной скоростью, направляемую индикатором 315, как описано выше.
[00185] На этапе 515 в то время как оператор продвигает иглу, система непрерывно определяет давление обратной связи в игле и обеспечивает обратную связь в визуальной или звуковой форме относительно определенного давления. Визуальный сигнал изменяется, когда изменяется определяемое давление.
[00186] На этапе 520 оператор продолжает продвигать иглу, пока система не подает сигнал, указывающий, что давление текучей среды превысило верхнее пороговое значение.
[00187] На этапе 525 определено, что давление текучей среды превышает верхнее пороговое значение, так что система подает предупреждающий сигнал в форме звукового, визуального и/или тактильного сигнала. В ответ на сигнал, указывающий, что давление текучей среды превысило верхнее пороговое значение, оператор останавливает продвижение иглы. Кроме того, исполняющий блок может остановить двигатель для прекращения потока текучей среды к игле.
[00188] На этапе 530 электрический сигнал стимуляции нерва применят к кончику иглы 340 или рядом с ним. Например, как описано выше, электрическая стимуляция нерва может быть передана к проводящему элементу, расположенному рядом с кончиком иглы. Электрическая стимуляция нерва может быть обеспечена автоматически системой в ответ на давление текучей среды, превышающее верхнее пороговое значение. Например, когда давление текучей среды превышает верхнее пороговое значение, система подает соответствующий сигнал оператору. Кроме того, в тот момент или после короткой задержки, такой как 1-3 сек, система может выполнить электрическую стимуляцию нерва. Согласно еще одному варианту реализации оператор может применить электрические стимулы путем обеспечения вводной подсказки, такой как нажатие кнопки или устная команда. В ответ на подсказку оператора электрическая стимуляция нерва применяется к пациенту. Иными словами, когда давление текучей среды превышает верхнее пороговое значение, система предлагает оператору применить электрический разряд, и в ответ на этот сигнал оператор применяет электрический разряд.
[00189] На этапе 540 оператор отслеживает пациента в отношении определения любой клинически наблюдаемой реакции, такой как конвульсия мышцы. Затем оператор обеспечивает ввод в систему с указанием того, была ли выявлена наблюдаемая реакция. Например, оператор может нажать первую кнопку, если он заметил конвульсию, или оператор может нажать вторую кнопку, если он не наблюдал конвульсию. Если оператор подтвердил наблюдаемую реакцию, способ переходит к этапу 545. Если оператор не подтвердил наблюдаемую реакцию, способ переходит к этапу 560.
[00190] На этапе 560 система обеспечивает тревожное оповещение оператору. Оповещение может быть визуальным, звуковым и/или тактильным. Оповещение предупреждает оператора, что игла может быть расположена интрафасцикулярно. Например, система может обеспечить слышимое предупреждающее звуковое оповещение, такое как слово "Предупреждение", с одновременным обеспечением вспышки света на ручном блоке.
[00191] На этапе 550 оператор извлекает иглу и повторяет ее введение в попытке разместить иглу в целевой области, не прокалывая периневрий. Таким образом, способ повторно запускается на этапе 510.
[00192] Если на этапе 540 наблюдаемая реакция отсутствует, способ переходит к этапу 560. На этапе 560 система обеспечивает сигнал оператору, указывающий, что игла должным образом расположена для инъекции (т.е. кончик иглы расположен экстрафасцикулярно). Например, исполняющий блок 50 может обеспечить звуковой сигнал, такой как звуковое воспроизведение слова "Продолжайте", или подать визуальный сигнал, такой как слово "Продолжайте", на экране отображающего устройства исполняющего блока или ручного блока.
[00193] На этапе 565 скорость текучей среды увеличивается до второй скорости, которая выше, чем первая скорость. Оператор может ввести предварительное значение, которое может быть наблюдаемым таким образом, чтобы оператор мог обнаружить, что игла размещена должным образом. После подтверждения размещения оператор может ввести болюс (одноразовую дозу) текучей среды для анестезирования пациента. Согласно еще одному варианту реализации оператор может ввести болюс текучей среды без ввода первого значения для проверки размещения иглы. В любом случае текучая среда на этапе 565 вводится с более высокой скоростью, чем предыдущая низкая скорость. Согласно еще одному варианту реализации в ответ на указание, что верхний предел давления превышен, и указание, что реакция не наблюдается в ответ на электрическую стимуляцию нерва, исполняющий блок может автоматически увеличить расход, например, путем увеличения скорости двигателя.
[00194] Еще одно преимущество предложенных устройства и способа состоит в объективной природе давления, измеренного управляемым компьютером устройством для доставки лекарственного средства, которое отслеживается во время всех фаз процесса инъекции. Таким образом, лечащий врач больше не полагается на субъективную природу "ощущения", а скорее снабжен объективной информацией об абсолютных значениях во время выполнения каждой фазы этого рискованного способа. Каждая фаза способа усовершенствована за счет возможности объективного мониторинга давления на непрерывной основе.
[00195] Следует понимать, что значение 300 мм рт.ст. (40,0 КПа) в качестве максимального заданного давления для остановки потока текучей среды является только примером, и что по усмотрению лечащего врача может быть выбрано более низкое или более высокое заданное давление. Описанные в настоящей заявке способы одинаково применимы к тканям человека и животных.
[00196] Специалистам понятно, что вышеописанные варианты реализации могут быть выполнены с изменениями или модификациями без отступления от широких изобретательских концепций настоящего изобретения. Например, в приведенном выше описании система описана в контексте обеспечения инфузии текучей среды. Однако следует понимать, что система может использоваться для размещения иглы при аспирации заполненной текучей средой ткани. В частности, инъекционное устройство может использоваться для аспирации заполненного текучей средой тканевого пространства после определения идентификации указанного заполненного текучей средой пространства. Аспирация может использоваться для извлечения образца тканевой или внеклеточной текучей среды (т.е. мозговой цереброспинальной жидкости, внутрисуставной текучей среды, крови и т.п.) или может использоваться для определения правильного размещения иглы для инъекций. Во время процедуры аспирации "входное давление" измеряется тем же способом, как и давление в заполненном текучей средой тканевом пространстве, которое характеризуется падением давления. Аналогично, ложное падение давления также идентифицируется с использованием процедуры аспирации, поскольку содержание внутренней тканевой структуры (т.е. кисты) быстро дренируется, и входное давление поднимется выше порогового входного давления.
[00197] Таким образом, следует понимать, что настоящее изобретение не ограничивается конкретными описанными в настоящей заявке вариантами реализации, но включает в себя все изменения и модификации, которые находятся в пределах объема защиты и принципа настоящего изобретения, определенных пунктами приложенной формулы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВВЕДЕНИЕ ЛЕКАРСТВЕННЫХ СРЕДСТВ С ИЗМЕРЕНИЕМ ДАВЛЕНИЯ И ПРЕРЫВИСТЫМ ПОТОКОМ ДЛЯ ИДЕНТИФИКАЦИИ НАПОЛНЕННЫХ ТЕКУЧЕЙ СРЕДОЙ АНАТОМИЧЕСКИХ ПРОСТРАНСТВ И ДЛЯ ОБЕСПЕЧЕНИЯ В НИХ ИНЪЕКЦИИ | 2013 |
|
RU2638449C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ БЛОКАДЫ ПЕРИФЕРИЧЕСКОГО НЕРВА | 2018 |
|
RU2738796C1 |
| УСТРОЙСТВО ДЛЯ ВЛИВАНИЯ ЛЕКАРСТВЕННЫХ СРЕДСТВ | 2018 |
|
RU2741472C1 |
| УПРАВЛЯЕМАЯ КОМПЬЮТЕРОМ СИСТЕМА ДЛЯ ДОСТАВКИ ЛЕКАРСТВА С ИЗМЕРЕНИЕМ ДИНАМИЧЕСКОГО ДАВЛЕНИЯ | 2007 |
|
RU2437683C2 |
| СПОСОБ ВНУТРИАРТЕРИАЛЬНОЙ ИНЪЕКЦИИ ПО А.Л. УРАКОВУ | 2006 |
|
RU2344767C2 |
| ИНЪЕКЦИОННОЕ УСТРОЙСТВО И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2018 |
|
RU2766525C2 |
| ИНЪЕКЦИОННОЕ УСТРОЙСТВО С КОЖУХОМ ДЛЯ ИГЛЫ, ПРЕДНАЗНАЧЕННОЕ ДЛЯ СНИЖЕНИЯ ЧУВСТВИТЕЛЬНОСТИ КОЖИ | 2012 |
|
RU2573041C2 |
| ИНЪЕКЦИОННАЯ СИСТЕМА ДЛЯ САМОСТОЯТЕЛЬНЫХ ИНЪЕКЦИЙ | 2008 |
|
RU2471514C2 |
| ШПРИЦ ДЛЯ ВНУТРИАРТЕРИАЛЬНЫХ ИНЪЕКЦИЙ | 2007 |
|
RU2327491C1 |
| УСТРОЙСТВО И СИСТЕМА КОНТРОЛЯ ВВЕДЕНИЯ ЛЕКАРСТВЕННЫХ СРЕДСТВ ПУТЕМ ИНЪЕКЦИИ | 2017 |
|
RU2746897C2 |
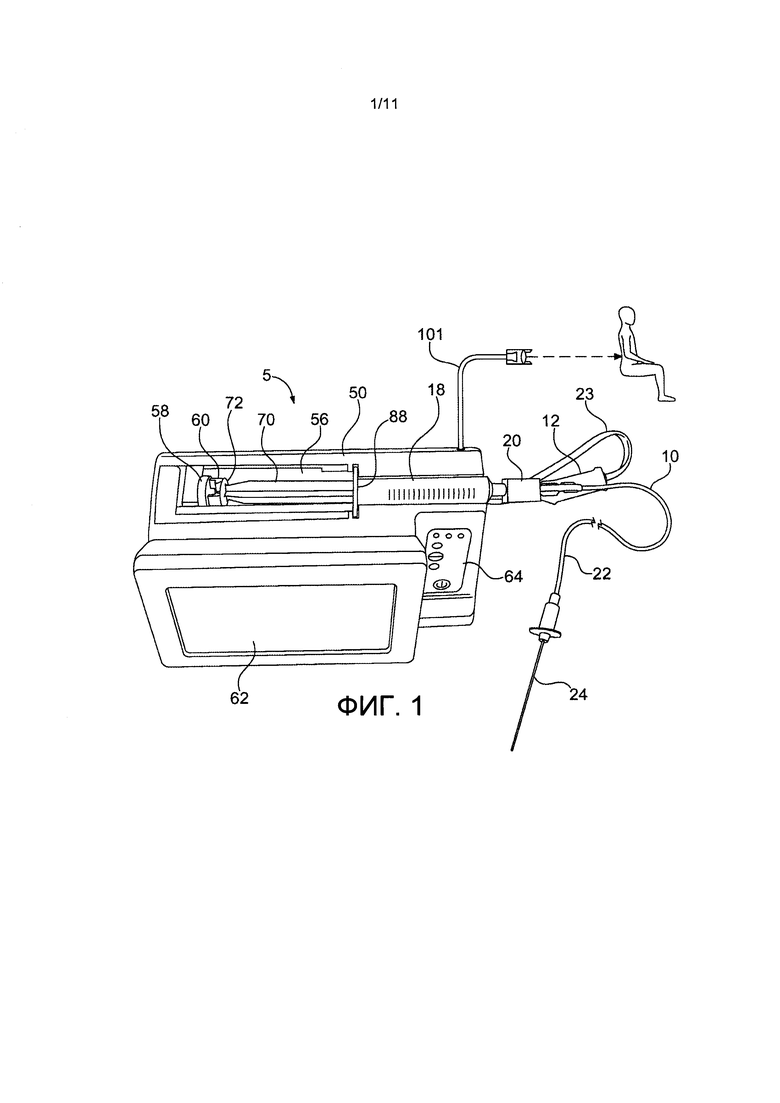
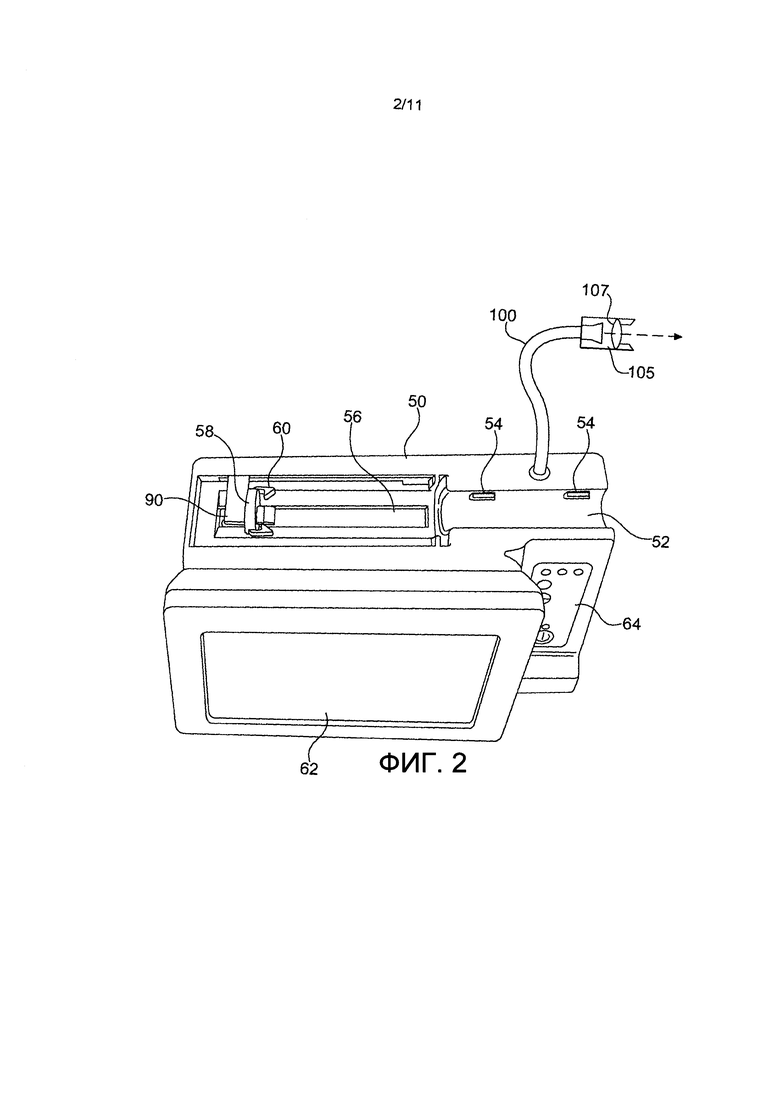

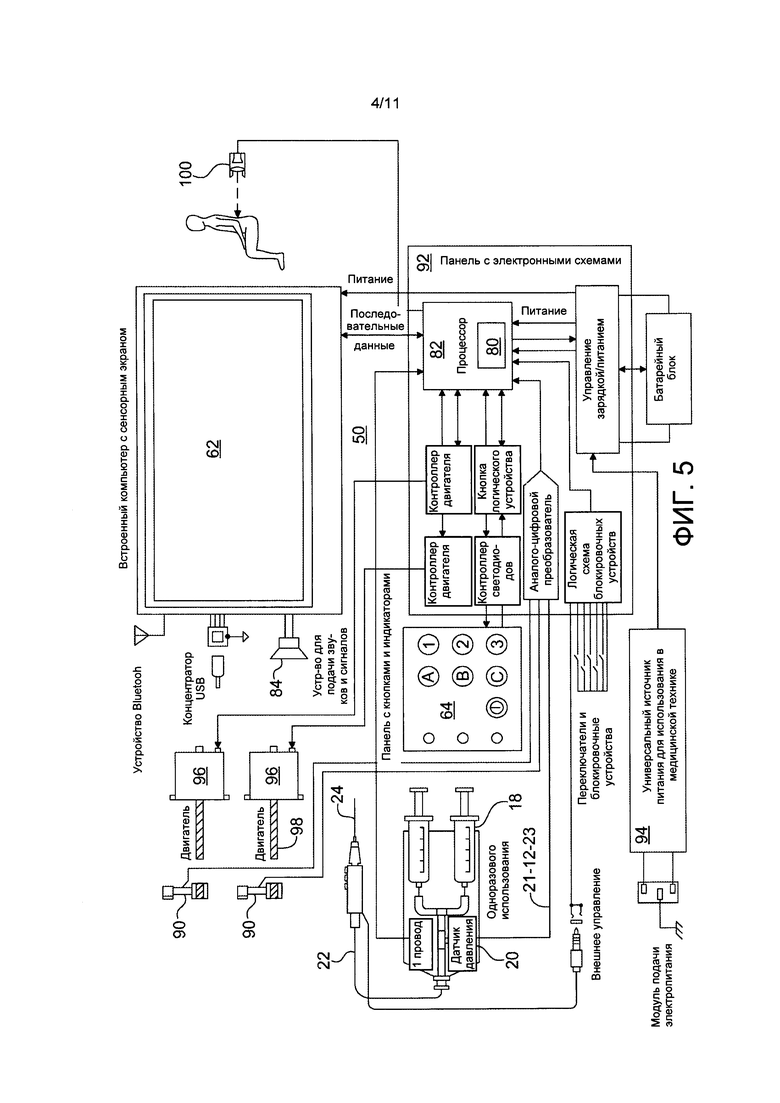
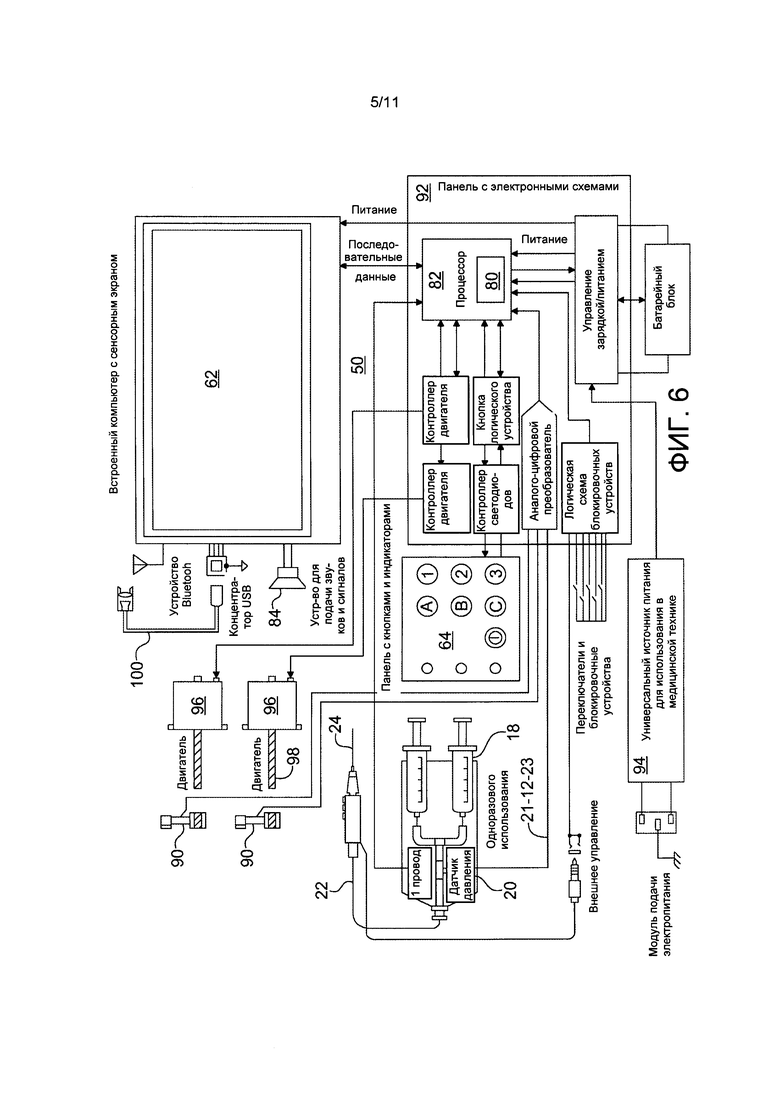
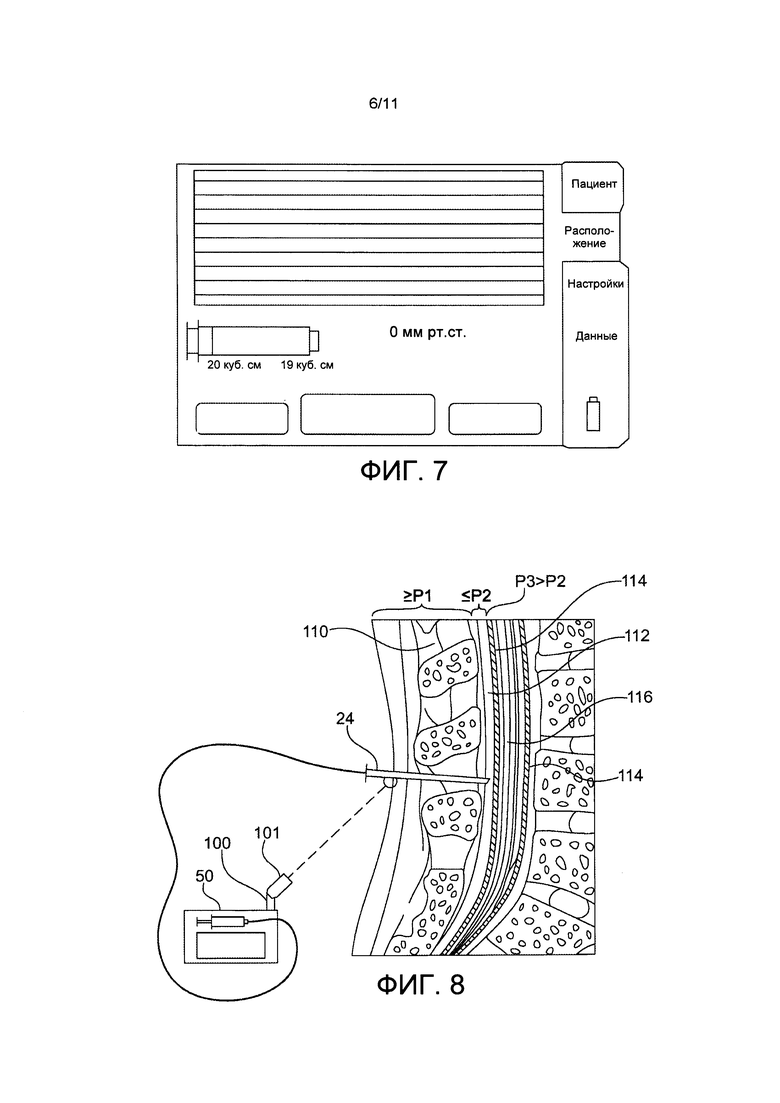
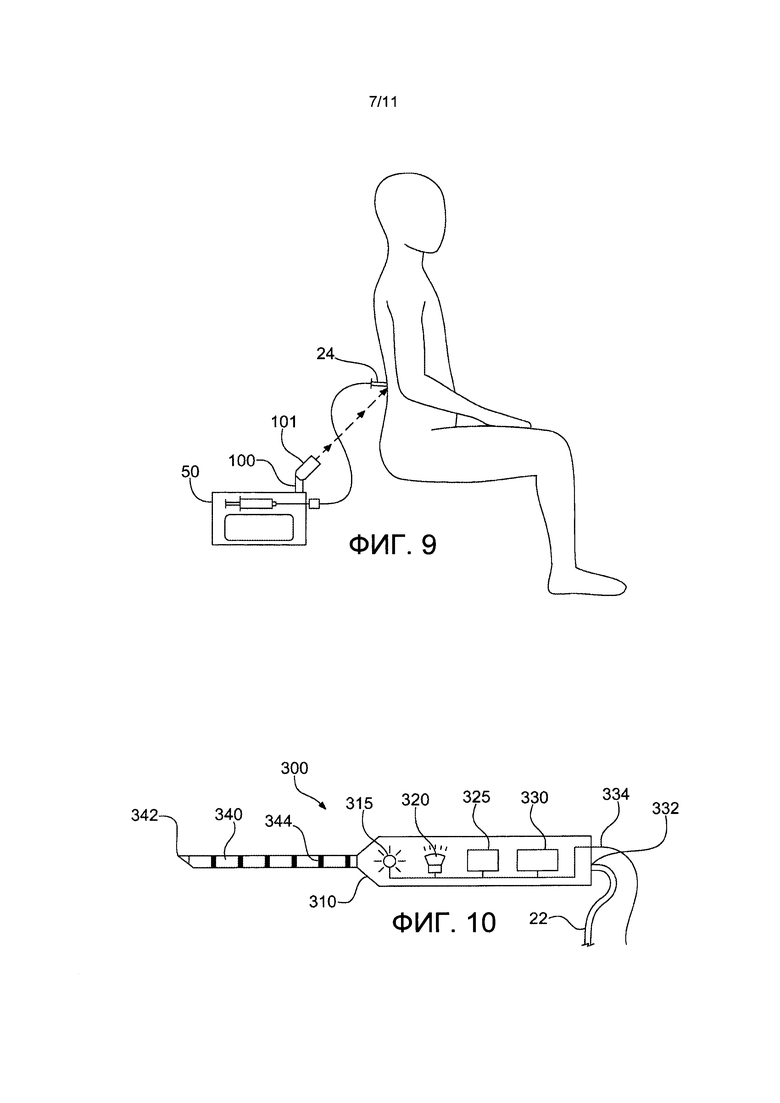
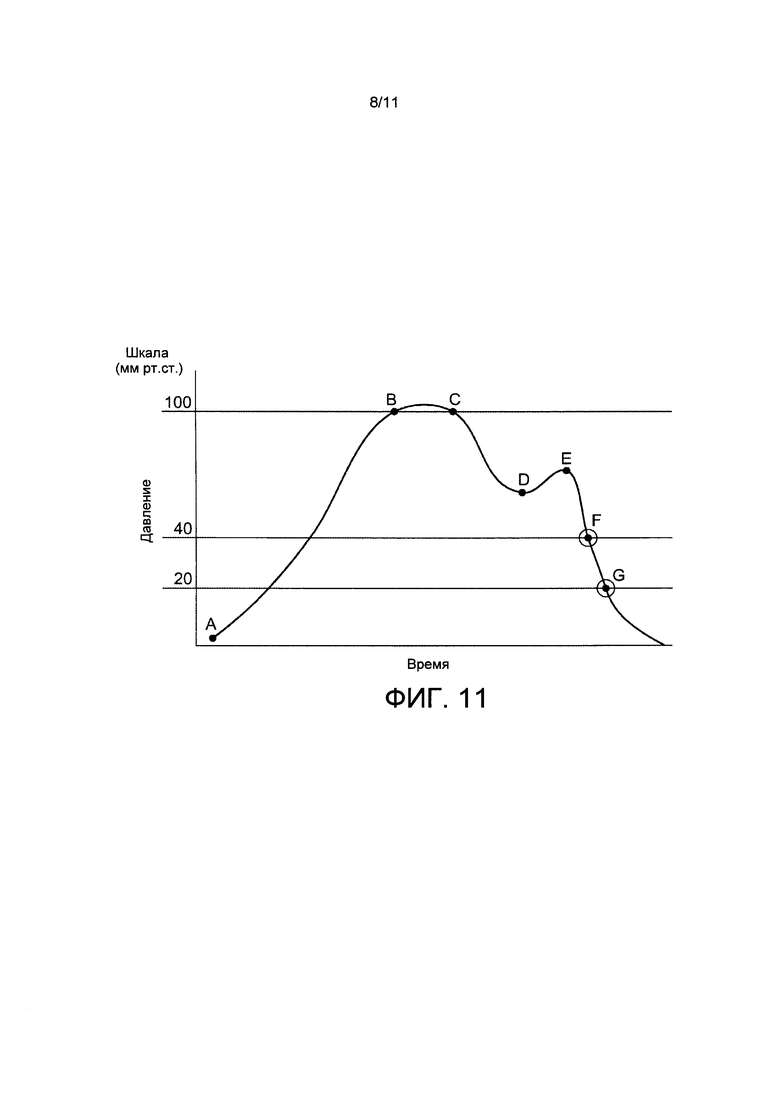
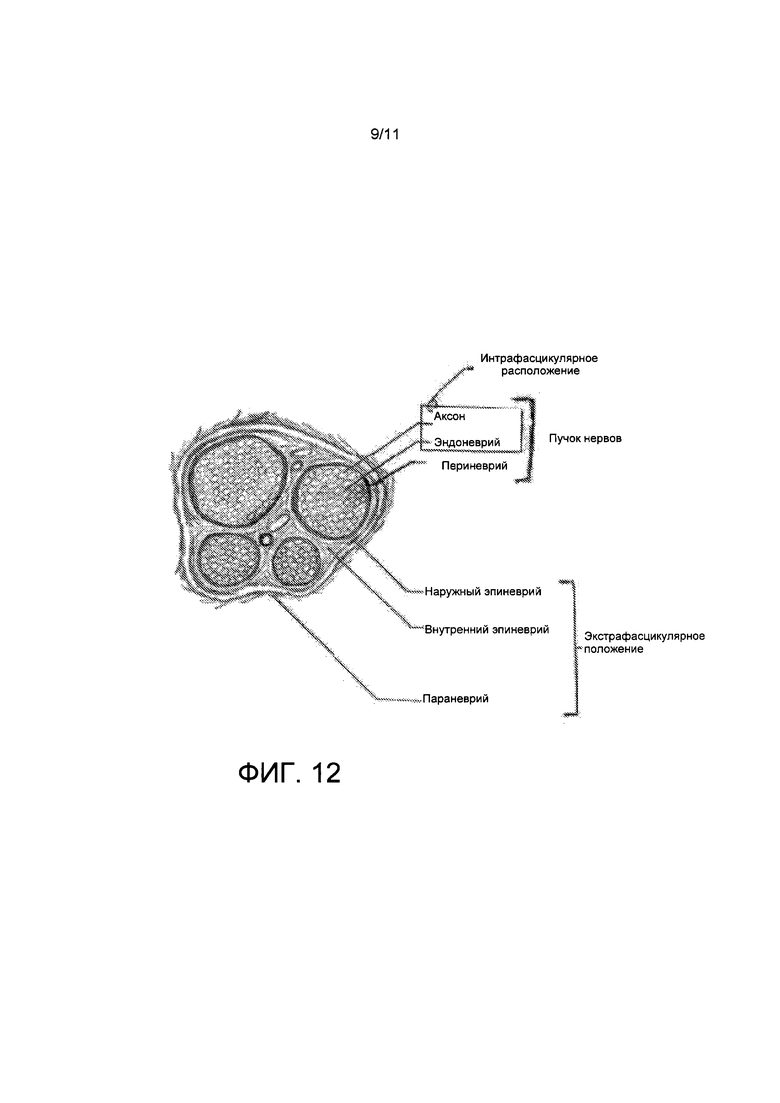
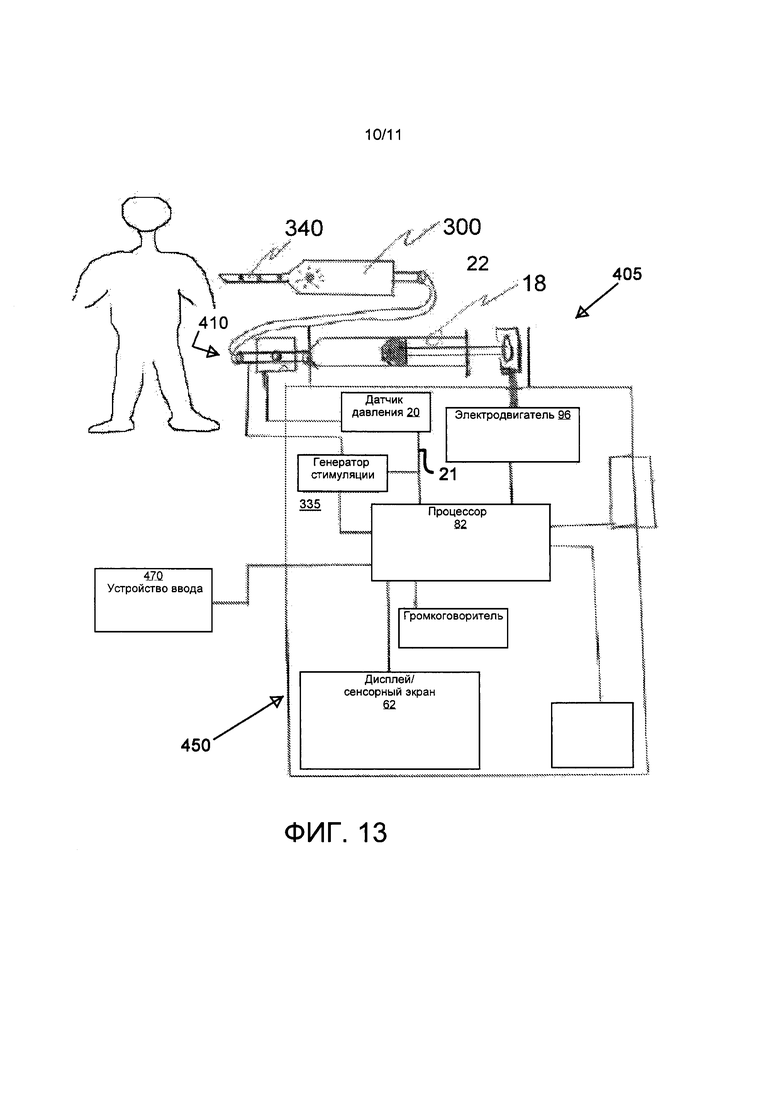
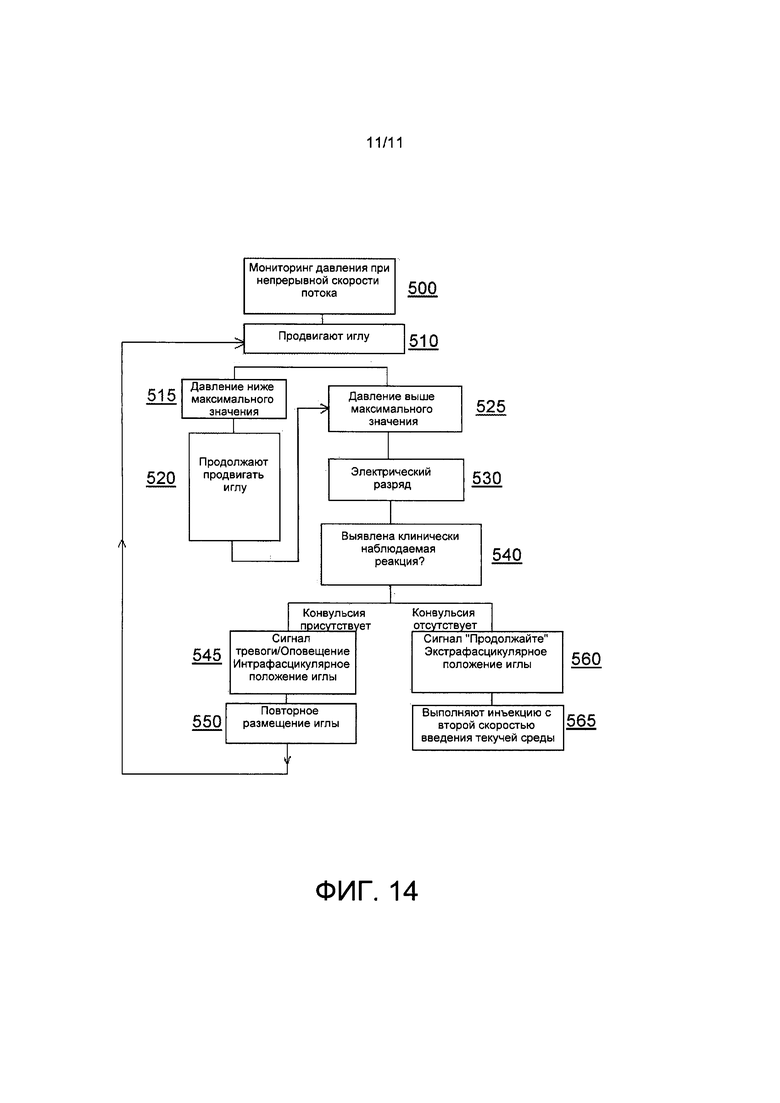
Изобретение относится к медицинской технике, а именно к устройству для введения текучей среды в анатомическое пространство. Устройство содержит: систему инъекции для управления потоком текучей среды из резервуара текучей среды к игле, причем игла выполнена с возможностью введения под кожу субъекта-млекопитающего; датчик для определения характеристики, указывающей давление текучей среды в игле, причем датчик выполнен с возможностью непрерывного определения характеристики при введении иглы в тело пациента; и элемент для электрической стимуляции нерва для обеспечения электрической стимуляции нерва в области кончика иглы или рядом с ним. Причем элемент для электрической стимуляции нерва обеспечивает электрическую стимуляцию нерва пациента после того, как датчик определит характеристику давления текучей среды, указывающую давление текучей среды, превышающее верхнее пороговое значение. 4 н. и 41 з.п. ф-лы, 14 ил.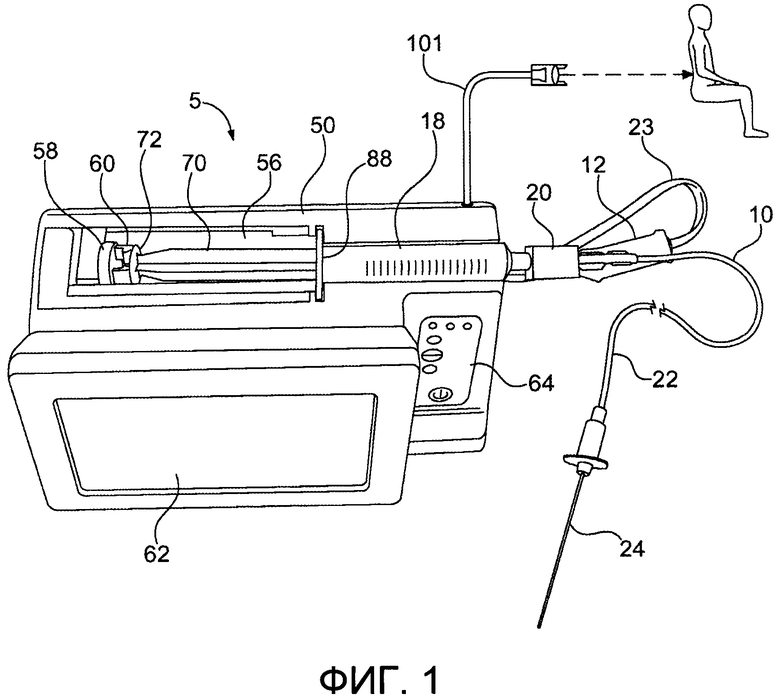
1. Устройство для введения текучей среды в анатомическое пространство, содержащее:
систему инъекции для управления потоком текучей среды из резервуара текучей среды к игле, причем игла выполнена с возможностью введения под кожу субъекта-млекопитающего;
датчик для определения характеристики, указывающей давление текучей среды в игле, причем датчик выполнен с возможностью непрерывного определения характеристики при введении иглы в тело пациента; и
элемент для электрической стимуляции нерва для обеспечения электрической стимуляции нерва в области кончика иглы или рядом с ним;
причем элемент для электрической стимуляции нерва обеспечивает электрическую стимуляцию нерва пациента после того, как датчик определит характеристику давления текучей среды, указывающую давление текучей среды, превышающее верхнее пороговое значение.
2. Устройство по п. 1, в котором система содержит индикатор, выполненный с возможностью выдачи звукового, визуального или тактильного сигнала.
3. Устройство по п. 2, в котором индикатор выполнен с возможностью выдачи сигнала, когда давление текучей среды превышает верхнее пороговое значение.
4. Устройство по п. 2, содержащее устройство ввода, выполненное с возможностью обеспечения механизма для ввода оператором подтверждения, наблюдалась ли клиническая реакция в ответ на электрическую стимуляцию нерва.
5. Устройство по п. 4, в котором индикатор выполнен с возможностью выдачи сигнала, указывающего на то, что игла находится в соответствующем положении для инъекции, причем индикатор выполнен с возможностью выдачи сигнала в ответ на сигнал от устройства ввода, указывающий на то, что клиническая реакция не наблюдалась.
6. Устройство по любому из пп. 1-5, в котором система инъекции содержит резервуар для текучей среды и удлиненную гибкую трубку, причем первый конец гибкой трубки соединен с резервуаром для текучей среды и второй конец гибкой трубки соединен с иглой.
7. Устройство по п. 6, в котором датчик расположен последовательно между резервуаром для текучей среды и иглой таким образом, что датчик определяет давление текучей среды в линии с потоком текучей среды между резервуаром и иглой.
8. Устройство по любому из пп. 1-7, в котором система инъекции содержит микропроцессор для управления скоростью текучей среды, вытекающей из резервуара для текучей среды.
9. Устройство для введения текучей среды в анатомическое пространство, содержащее:
систему инъекции для управления потоком текучей среды из резервуара для текучей среды к игле, причем игла выполнена с возможностью введения под кожу субъекта-млекопитающего;
датчик для определения характеристики, указывающей давление текучей среды в игле, причем система инъекции управляет потоком текучей среды к игле в ответ на характеристику, определяемую датчиком, и датчик выполнен с возможностью непрерывного определения указанной характеристики при введении иглы в тело пациента; и
световой узел, соединенный с системой инъекции, причем световой узел выдает непрерывно изменяющийся сигнал, указывающий давление текучей среды в игле, в ответ на характеристику, определяемую датчиком, причем
световой узел выдает визуальный сигнал, который изменяется согласно частоте, относящейся к скорости введения иглы, таким образом, что визуальный сигнал направляет скорость введения иглы.
10. Устройство по п. 9, в котором световой узел содержит свет, проецируемый рядом с иглой.
11. Устройство по п. 9 или 10, в котором система инъекции содержит резервуар для текучей среды и удлиненную гибкую трубку, причем первый конец гибкой трубки соединен с резервуаром для текучей среды, а второй конец гибкой трубки соединен с иглой.
12. Устройство по п. 11, в котором датчик расположен последовательно между резервуаром для текучей среды и иглой таким образом, что датчик определяет давление текучей среды в линии с потоком текучей среды между резервуаром и иглой.
13. Устройство по любому из пп. 9-12, в котором система инъекции содержит микропроцессор для управления скоростью текучей среды, вытекающей из резервуара для текучей среды.
14. Устройство по п. 11, в котором световой узел проецирует свет через гибкую трубку.
15. Устройство по любому из пп. 9-14, в котором световой узел содержит когерентный свет, проецирующий световой пучок.
16. Устройство по любому из пп. 9-15, в котором световой узел проецирует цифру, букву или символ, указывающие давление, определяемое датчиком давления.
17. Устройство по п. 16, в котором световой узел непрерывно обновляет проецируемые цифру, букву или символ в ответ на изменения давления, определенные датчиком давления.
18. Устройство по любому из пп. 9-17, в котором резервуар для текучей среды содержит шприц, имеющий поршень, и система инъекции содержит механизм управления для автоматического продвижения поршня для вытеснения текучей среды из шприца.
19. Устройство по любому из пп. 9-18, в котором датчик содержит преобразователь давления.
20. Устройство по любому из пп. 9-19, в котором датчик определяет давление текучей среды и управляющее устройство для текучей среды управляет потоком текучей среды в ответ на определяемое давление текучей среды.
21. Устройство по п. 11, содержащее рукоятку, соединенную со вторым концом трубки, причем осветительный элемент соединен с рукояткой.
22. Устройство по п. 11, в котором осветительный элемент содержит оптоволоконный кабель.
23. Устройство по п. 22, в котором оптоволоконный кабель проходит вдоль длины трубки.
24. Устройство по любому из пп. 9-23, в котором световой узел выполнен таким образом, что цвет света, проецируемого осветительным элементом, изменяется непрерывно в ответ на характеристику, определяемую датчиком давления.
25. Устройство по п. 9-24, в котором вспышки или мигания визуального сигнала соответствуют частоте, которая коррелирует со скоростью введения иглы.
26. Устройство по любому из пп. 9-25, в котором игла содержит метки, расположенные на некотором расстоянии друг от друга вдоль длины иглы, для обеспечения эталонных расстояний для введения иглы.
27. Устройство для введения текучей среды в анатомическое пространство, содержащее:
управляющее устройство для текучей среды, управляющее потоком текучей среды из резервуара для текучей среды к игле, причем игла выполнена с возможностью введения под кожу субъекта-млекопитающего;
датчик для определения характеристики текучей среды в игле, причем данная характеристика указывает давление текучей среды или расход текучей среды в игле;
осветительный элемент, проецирующий визуально заметный сигнал таким образом, что визуально заметный сигнал является легко видимым для оператора, причем визуально заметный сигнал изменяется, причем
вспышки или мигания осветительного элемента соответствуют частоте, которая коррелирует с необходимой скоростью введения иглы.
28. Устройство по п. 27, в котором осветительный элемент выполнен с возможностью проецирования сигнала на тело пациента рядом с намеченным участком для введения иглы.
29. Устройство по п. 27 или 28, в котором датчик определяет давление текучей среды и управляющее устройство для текучей среды управляет потоком текучей среды в ответ на определяемое давление текучей среды.
30. Устройство по любому из пп. 27-29, в котором осветительный элемент выполнен с возможностью проецирования фокусированного светового пучка.
31. Устройство по любому из пп. 27-30, в котором управляющее устройство для текучей среды содержит шприц, имеющий поршень и механизм управления для автоматического продвижения поршня для вытеснения текучей среды из шприца.
32. Устройство по п. 31, в котором механизм управления содержит микропроцессор, выполненный с возможностью приема сигналов от датчика относительно определенной характеристики.
33. Устройство по любому из пп. 27-32, в котором датчик содержит преобразователь давления.
34. Устройство по любому из пп. 27-33, в котором игла содержит метки, расположенные на некотором расстоянии друг от друга вдоль длины иглы, для обеспечения эталонных расстояний для введения иглы.
35. Устройство по любому из пп. 27-34, в котором управляющее устройство для текучей среды содержит резервуар для текучей среды и удлиненную гибкую трубку, причем первый конец гибкой трубки соединен с резервуаром для текучей среды и второй конец гибкой трубки соединен с иглой.
36. Устройство для введения текучей среды субъекту-млекопитающему из резервуара для текучей среды, содержащее:
иглу, имеющую метки вдоль ее длины;
резервуар для текучей среды, сообщающийся по текучей среде с иглой;
управляющее устройство для текучей среды, выполненное с возможностью управления потоком текучей среды из резервуара к игле; и
индикаторный элемент, выдающий сигнал индикатора для оператора, причем сигнал индикатора соответствует намеченной скорости введения иглы в тело пациента, а метки на игле выполнены с возможностью обеспечения визуальной обратной связи относительно скорости введения иглы в тело пациента.
37. Устройство по п. 36, в котором резервуар для текучей среды содержит цилиндр шприца.
38. Устройство по п. 37, в котором управляющее устройство для текучей среды содержит поршень, выполненный с возможностью смещения в пределах цилиндра для выталкивания текучей среды из цилиндра.
39. Устройство по любому из пп. 36-38, в котором метки на игле равномерно расположены на определенном расстоянии друг от друга вдоль длины иглы.
40. Устройство по любому из пп. 36-39, в котором метки являются равноотстоящими друг от друга вдоль длины иглы.
41. Устройство по любому из пп. 36-40, в котором индикаторный элемент выдает сигнал индикатора с частотой повторения.
42. Устройство по п. 41, в котором частота соответствует намеченной скорости введения иглы таким образом, что сигнал индикатора направляет скорость введения иглы.
43. Устройство по любому из пп. 36-42, в котором индикаторный элемент содержит осветительный элемент.
44. Устройство по п. 43, в котором вспышки или мигания визуального сигнала соответствуют частоте, которая коррелирует со скоростью введения иглы.
45. Устройство по п. 44, содержащее рукоятку, соединенную со вторым концом трубки, причем осветительный элемент установлен на рукоятке.
| US 2012022407 A1, 26.01.2012 | |||
| US 2014221965 A1, 07.08.2014 | |||
| US 4998914 A, 12.03.1991 | |||
| US 2004035743 A1, 26.02.2004 | |||
| US 2012289819 A1, 15.11.2012 | |||
| US 2011190596 A1, 04.08.2011 | |||
| US 2004149282 A1, 05.08.2004. |

