Изобретение относится к области радиолокации и может быть использовано в радиолокационных системах с зондирующими сигналами, кодированными по фазе (фазокодоманипулированными сигналами), для измерения поляризационной матрицы рассеяния объекта.
Известен способ подавления боковых лепестков автокорреляционной функции широкополосного сигнала [Патент RU №2335782, МПК: G01S 7/36, опубликован 10.10.2008], в котором в каждом периоде зондирования излучают один из двух, согласованных друг с другом фазокодоманипулированных (ФКМ) сигналов. При приеме отраженных сигналов производят их сжатие (оптимальную фильтрацию) отдельно для каждого периода повторения зондирующих импульсов, после чего суммируют результаты сжатия отраженных сигналов с задержкой первого результата относительно второго на период зондирования, в соответствии с временным положением ФКМ сигналов. При этом если результаты сжатия имеют амплитуды боковых лепестков, равные по модулю, но противоположные по знаку, а также равные амплитуды их основных пиков, то уровень боковых лепестков результата суммирования будет равен нулю, а полезный сигнал (основной пик) увеличится в два раза.
В данном способе в качестве зондирующих сигналов используют дополнительные сигналы, кодированные в соответствии с дополнительными последовательностями [Теория сложных сигналов. Л.Е. Варакин. - М.: Советское радио, 1970, с. 367], которые также возможно использовать для измерения поляризационной матрицы рассеяния объекта.
Недостаток данного способа заключается в невозможности измерения всех элементов поляризационной матрицы рассеяния объекта.
В качестве прототипа для заявляемого способа выбран способ измерения поляризационной матрицы рассеяния объекта [Патент RU №2204842, МПК: G01S 13/00, опубликован 20.05.2003], заключающийся в том, что при зондировании на одной несущей частоте на ортогональных поляризациях одновременно излучают соответствующие ортогональные по структуре радиосигналы, затем принимают одновременно все ортогонально поляризованные составляющие отраженных от объекта радиосигналов. Выходные радиосигналы каждого соответствующего по поляризации канала приемника подают на фильтры, каждый из которых согласован с одним из излученных ортогональных по структуре радиосигналов. После этого измеряют параметры выходного радиосигнала каждого согласованного фильтра, определяющие соответствующие элементы поляризационной матрицы рассеяния объекта.
В данном способе недостатком является то, что сжатые согласованными фильтрами сигналы имеют боковые лепестки, влияющие на точность измерения. Сжатый согласованным фильтром сигнал с точностью до постоянного множителя повторяет задержанную во времени копию автокорреляционной функции сигнала и содержит в своем составе основной пик и боковые лепестки. Основной пик является полезным сигналом, а боковые лепестки являются помехами, которые маскируют основные пики сжатых сигналов с меньшей энергией. Кроме этого боковые лепестки могут быть приняты за ложные сигналы.
Технический результат, на который направлено заявляемое изобретение, заключается в повышении точности измерения поляризационной матрицы рассеяния объекта за счет устранения влияния боковых лепестков сигналов, сжатых согласованными фильтрами, а также за счет устранения влияния взаимно корреляционных составляющих, обусловленных прохождением сигналов через несогласованные фильтры.
Технический результат достигается тем, что в способе измерения поляризационной матрицы рассеяния объекта при зондировании на одной несущей частоте на ортогональных поляризациях одновременно излучают соответствующие ортогональные по структуре радиосигналы, затем принимают одновременно все ортогонально поляризованные составляющие отраженных от объекта радиосигналов. Выходные радиосигналы каждого соответствующего по поляризации канала приемника подают на фильтры, каждый из которых согласован с одним из излученных радиосигналов. Измерение осуществляют за два или более периода зондирования. При этом в качестве излучаемых радиосигналов на ортогональных поляризациях используют пару сигналов, кодированных дополнительными последовательностями, которые изменяют от периода к периоду зондирования таким образом, что обе дополнительные последовательности разворачиваются, а одна из них кроме этого инвертируется. После чего сжатые согласованными фильтрами в каждом из периодов зондирования радиосигналы объединяют и по параметрам объединенных радиосигналов определяют соответствующие элементы поляризационной матрицы рассеяния объекта.
Сущность заявляемого способа измерения поляризационной матрицы рассеяния объекта состоит в том, что при зондировании на одной несущей частоте на ортогональных поляризациях одновременно излучают соответствующие ортогональные по структуре радиосигналы (осуществляют облучение объекта). После этого принимают одновременно все (четыре) ортогонально поляризованные составляющие отраженных от объекта радиосигналов двумя, соответствующими по поляризации, каналами приемника. Для разделения ортогональных по структуре одинаково поляризованных составляющих отраженных радиосигналов выходные радиосигналы каждого соответствующего по поляризации канала приемника подают на фильтры, каждый из которых согласован с одним из излученных ортогональных по структуре радиосигналов. При этом в качестве излучаемых радиосигналов на ортогональных поляризациях (например, горизонтальной и вертикальной) используют пару сигналов, кодированных дополнительными последовательностями (дополнительных сигналов).
Измерение поляризационной матрицы рассеяния объекта осуществляют за два или более периода зондирования. В каждом периоде зондирования излучают одновременно на ортогональных поляризациях пару дополнительных сигналов. При этом каждый из фильтров, на которые подают выходные радиосигналы каналов приемника, согласуют с одним дополнительным сигналом из пары использованных.
Кодирующие дополнительные последовательности пары излучаемых сигналов изменяют от периода к периоду зондирования по следующему правилу.
Если известна пара дополнительных последовательностей длины N, используемая в нечетных периодах зондирования: {аi} и {bi}, значения символов которых ai є {-1, 1}, bi є {-1, 1}, где i=0, .., N-1, то измененную пару дополнительных последовательностей {сi} и {di}, используемую в четных периодах зондирования, получают с помощью одного из соотношений:
 или
или  где i=0, .., N-1.
где i=0, .., N-1.
Согласно приведенным соотношениям обе дополнительные последовательности разворачиваются, а одна из них кроме этого инвертируется.
Если измерение выполняют, например, за два периода зондирования, то пару сигналов, кодированных дополнительными последовательностями {аi} и {bi} используют в первом (нечетном) периоде, а пару сигналов, кодированных дополнительными последовательностями {сi}, используют во втором (четном) периоде зондирования. При этом дополнительные последовательности и {di} используются для кодирования радиосигналов, излучаемых на одной поляризации, а дополнительные последовательности {bi} и {di} - на другой ортогональной поляризации.
Измененные таким образом излучаемые сигналы не теряют свойств дополнительных сигналов, что позволяет в процессе их обработки при осуществлении измерения поляризационной матрицы рассеяния объекта избавиться от боковых лепестков, а также устранить взаимно корреляционные составляющие, обусловленные прохождением сигналов через несогласованные фильтры.
Сжатые согласованными фильтрами в каждом из периодов зондирования радиосигналы объединяют, после чего по параметрам объединенных радиосигналов определяют соответствующие элементы поляризационной матрицы рассеяния объекта.
В простейшем случае объединение реализуемо при суммировании результатов сжатия, полученных в двух периодах зондирования, в соответствии с временным положением зондирующих сигналов.
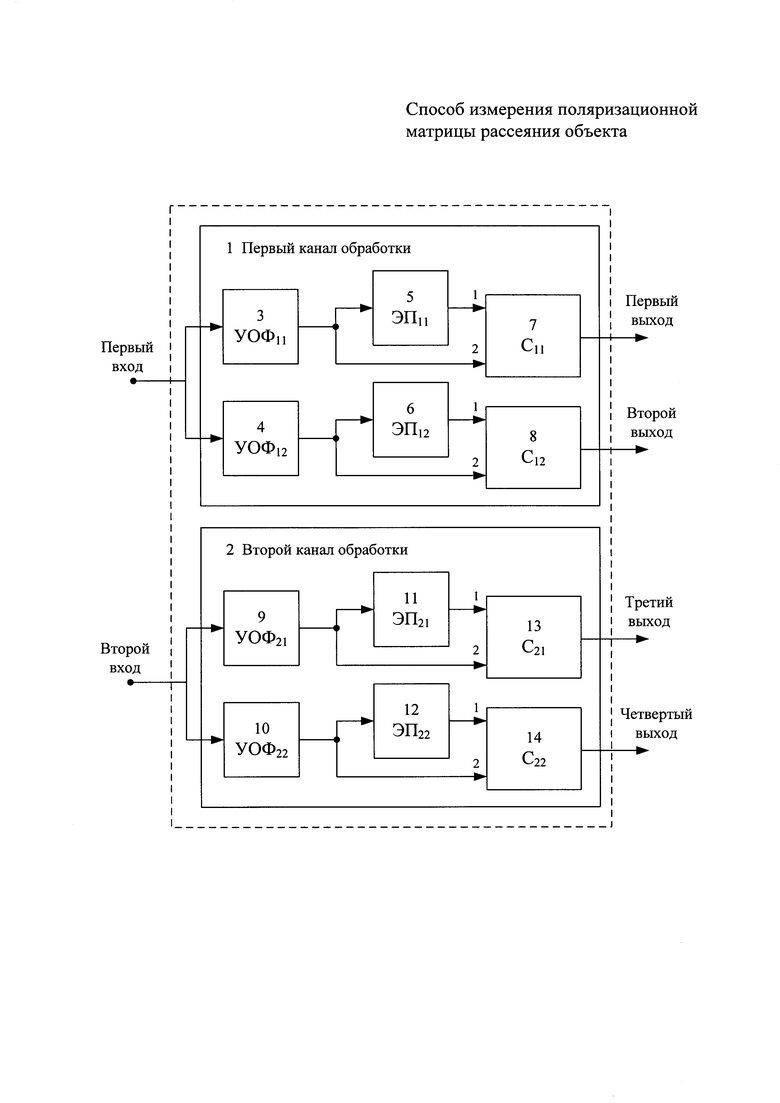
На чертеже представлена структурная схема устройства обработки принятых ортогонально поляризованных составляющих отраженных от объекта сигналов для двух периодов зондирования.
Данное устройство состоит из первого 1 и второго 2 одинаковых по структуре каналов обработки, соответствующих ортогональным поляризациям, и включает в себя первый управляемый оптимальный фильтр первого канала (УОФ11) 3, второй управляемый оптимальный фильтр первого канала (УОФ12) 4, первый элемент памяти первого канала (ЭП11) 5, второй элемент памяти первого канала (ЭП12) 6, первый сумматор первого канала (С11) 7, второй сумматор первого канала (С12) 8, первый управляемый оптимальный фильтр второго канала (УОФ21) 9, второй управляемый оптимальный фильтр второго канала (УОФ22) 10, первый элемент памяти второго канала (ЭП21) 11, второй элемент памяти второго канала (ЭП22) 12, первый сумматор второго канала (С21) 13 и второй сумматор второго канала (С22) 14.
Входы УОФ11 3 и УОФ12 4 соединены с первым входом устройства. Выход УОФ11 3 соединен с входом ЭП11 5 и со вторым входом С11 7, первый вход которого соединен с выходом ЭП11 5. Выход УОФ12 4 соединен с входом ЭП12 6 и со вторым входом С12 8, первый вход которого соединен с выходом ЭП12 6. Выходы С11 7 и С12 8 являются соответственно первым и вторым выходами устройства.
Входы УОФ21 9 и УОФ22 10 соединены со вторым входом устройства. Выход УОФ21 9 соединен с входом ЭП21 11 и со вторым входом С21 13, первый вход которого соединен с выходом ЭП21 11. Выход УОФ22 10 соединен с входом ЭП22 12 и со вторым входом С22 14, первый вход которого соединен с выходом ЭП22 12. Выходы С21 13 и С22 14 являются соответственно третьим и четвертым выходами устройства.
Работает устройство следующим образом.
В первом периоде зондирования излучается пара дополнительных сигналов на ортогональных поляризациях, принимаются все ортогонально поляризованные составляющие отраженных от объекта сигналов, выходные радиосигналы двух ортогональных по поляризации каналов приемника поступают на первый и второй входы представленного устройства обработки. При этом УОФ11 3 и УОФ21 9 согласованы с первым дополнительным сигналом из пары, а УОФ12 4 и УОФ22 10 согласованы со вторым дополнительным сигналом из пары. УОФ11 3, УОФ12 4, УОФ21 9 и УОФ22 10 осуществляют сжатие принятых отраженных от объекта сигналов. После этого полученные результаты сжатия поступают соответственно в ЭП11 5, ЭП12 6, ЭП21 11, ЭП22 12 и сохраняются в них.
Во втором периоде зондирования используемая пара дополнительных сигналов изменяется в соответствии с предлагаемым правилом (обе кодирующие их дополнительные последовательности разворачиваются, одна из них кроме этого инвертируется). После этого измененная пара дополнительных сигналов излучается на ортогональных поляризациях, принимаются все ортогонально поляризованные составляющие отраженных от объекта сигналов, выходные радиосигналы двух ортогональных по поляризации каналов приемника поступают на первый и второй входы устройства обработки. При этом УОФ11 3 и УОФ21 9 согласованы с первым дополнительным сигналом из пары, а УОФ12 4 и УОФ22 10 согласованы со вторым дополнительным сигналом из пары. УОФ11 3, УОФ12 4, УОФ21 9 и УОФ22 10 осуществляют сжатие принятых отраженных от объекта сигналов, после чего полученные результаты сжатия поступают соответственно в ЭП11 5, ЭП12 6, ЭП21 11, ЭП22 12, а также на вторые входы С11 7, С12 8, С21 13 и С22 14. При этом на первые входы всех сумматоров поступают задержанные на период зондирования отсчеты сигналов, сжатых в предыдущем периоде зондирования. На выходе каждого из сумматоров будет присутствовать радиосигнал, полученный после объединения отсчетов сигналов, сжатых в двух периодах зондирования.
Результаты суммирования на первом, втором, третьем и четвертом выходах устройства будут соответствовать четырем ортогонально поляризованным составляющим отраженных от объекта радиосигналов, которые определяют поляризационную матрицу рассеяния объекта.
Управляемые оптимальные фильтры, использованные в схеме данного устройства, представляют собой обычные оптимальные фильтры, каждый из которых настроен на сигнал, используемый в текущем периоде зондирования. Поскольку подаваемый на схему зондирующий сигнал изменяется, то существует необходимость изменять характеристики оптимального фильтра вслед за изменением зондирующего сигнала. Именно этот факт отражает определение оптимального фильтра как управляемого.
Элементы памяти устройства задерживают отчеты сжатых сигналов на период зондирования, тем самым обеспечивая согласование их временного положения относительно результатов сжатия сигналов, принятых в соседних периодах зондирования. В данном устройстве обработки используются элементы памяти типа FIFO (First In, First Out), в которых обработка данных производится в том же порядке, что и поступление.
Таким образом, использование пары дополнительных сигналов в качестве излучаемых одновременно на двух ортогональных поляризациях с изменением их кодирующих дополнительных последовательностей от периода к периоду зондирования позволяет существенно повысить точность измерения поляризационной матрицы рассеяния объекта.
Промышленная применимость данного способа возможна, исходя из того, что все используемые операции практически реализуемы в цифровой технике, а также программным способом в вычислительной технике.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения поляризационной матрицы рассеяния объекта с компенсацией искажений | 2017 |
|
RU2638559C1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ПОЛЯРИЗАЦИОННОЙ МАТРИЦЫ РАССЕИВАНИЯ ОБЪЕКТА | 2001 |
|
RU2187129C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛЯРИЗАЦИОННОЙ МАТРИЦЫ РАССЕЯНИЯ ОБЪЕКТА | 2001 |
|
RU2204842C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛЯРИЗАЦИОННОЙ МАТРИЦЫ РАССЕЯНИЯ ОБЪЕКТА | 2001 |
|
RU2190239C1 |
| Способ и устройство оценки комплексной матрицы обратного рассеяния радиолокационных объектов (варианты) | 2023 |
|
RU2810535C1 |
| Способ и устройство обработки векторных радиосигналов в полнополяризационных радиолокационных станциях | 2019 |
|
RU2695077C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛЯРИЗАЦИОННОЙ МАТРИЦЫ РАССЕЯНИЯ ОБЪЕКТА | 2001 |
|
RU2183022C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛЯРИЗАЦИОННЫХ ХАРАКТЕРИСТИК СРЕДЫ РАСПРОСТРАНЕНИЯ ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ | 2013 |
|
RU2533789C1 |
| Радиолокатор с поляризационной селекцией | 2016 |
|
RU2662452C2 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2192652C1 |
Изобретение относится к области радиолокации и может быть использовано в радиолокационных системах с зондирующими сигналами, кодированными по фазе (фазокодоманипулированными сигналами), для измерения поляризационной матрицы рассеяния объекта. Достигаемый технический результат - повышение точности измерения поляризационной матрицы рассеяния объекта за счет устранения влияния боковых лепестков сигналов, сжатых согласованными фильтрами, а также за счет устранения влияния взаимно корреляционных составляющих, обусловленных прохождением сигналов через несогласованные фильтры. Технический результат достигается тем, что в способе измерения поляризационной матрицы рассеяния объекта при зондировании на одной несущей частоте на ортогональных поляризациях одновременно излучают соответствующие ортогональные по структуре радиосигналы, затем принимают одновременно все ортогонально поляризованные составляющие отраженных от объекта радиосигналов, выходные радиосигналы каждого соответствующего по поляризации канала приемника подают на фильтры, каждый из которых согласован с одним из излученных радиосигналов, измерение осуществляют за два или более периода зондирования, при этом в качестве излучаемых радиосигналов на ортогональных поляризациях используют пару сигналов, кодированных дополнительными последовательностями, которые изменяют от периода к периоду зондирования таким образом, что обе дополнительные последовательности разворачиваются, а одна из них кроме этого инвертируется, затем сжатые согласованными фильтрами в каждом из периодов зондирования радиосигналы объединяют и по параметрам объединенных радиосигналов определяют соответствующие элементы поляризационной матрицы рассеяния объекта. 1 ил.
Способ измерения поляризационной матрицы рассеяния объекта, заключающийся в том, что при зондировании на одной несущей частоте на ортогональных поляризациях одновременно излучают соответствующие ортогональные по структуре радиосигналы, принимают одновременно все ортогонально поляризованные составляющие отраженных от объекта радиосигналов, выходные радиосигналы каждого соответствующего по поляризации канала приемника подают на фильтры, каждый из которых согласован с одним из излученных ортогональных по структуре радиосигналов, отличающийся тем, что измерение осуществляют за два или более периода зондирования, при этом в качестве излучаемых радиосигналов на ортогональных поляризациях используют пару сигналов, кодированных дополнительными последовательностями, которые изменяют от периода к периоду зондирования таким образом, что обе дополнительные последовательности разворачиваются, а одна из них кроме этого инвертируется, после чего сжатые согласованными фильтрами в каждом из периодов зондирования радиосигналы объединяют и по параметрам объединенных радиосигналов определяют соответствующие элементы поляризационной матрицы рассеяния объекта.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛЯРИЗАЦИОННОЙ МАТРИЦЫ РАССЕЯНИЯ ОБЪЕКТА | 2001 |
|
RU2204842C2 |
| ИНТЕРФЕРОМЕТРИЧЕСКИЙ СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ ОБЪЕКТА, НАБЛЮДАЕМОГО ЧЕРЕЗ ТУРБУЛЕНТНУЮ АТМОСФЕРУ | 1984 |
|
SU1840698A1 |
| СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНОГО ИЗОБРАЖЕНИЯ ПОВЕРХНОСТИ НА БАЗЕ БОРТОВОГО РАДИОТЕПЛОЛОКАТОРА | 2008 |
|
RU2368918C1 |
| СПОСОБ РАЗРЕШЕНИЯ ЦЕЛЕЙ ПО ДАЛЬНОСТИ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И ИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СО СЖАТИЕМ ИМПУЛЬСОВ И ВОССТАНОВЛЕНИЕМ СИГНАЛОВ | 2004 |
|
RU2296345C2 |
| US 5896098 A, 20.04.1999 | |||
| Устройство для получения потока сыпучих материалов с заданной плотностью | 1977 |
|
SU690315A1 |
| US 5329286 A, 12.07.1994. | |||

