ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к технологическому транспортному средству, в частности противопожарному транспортному средству, содержащему надземное устройство, такое как поворотная лестница и/или надземная спасательная платформа, согласно преамбуле пункта 1 формулы изобретения.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Для безопасной работы транспортные средства вышеупомянутого типа обычно содержат средства безопасности для обеспечения устойчивого размещения транспортного средства на земле, когда надземное устройство выдвигается и перемещается. Особенно важно избегать любого наклона транспортного средства, когда конец надземного устройства перемещается в поперечное положение, выступающее из корпуса транспортного средства. Для простоты в дальнейшем будет делаться ссылка только на поворотные и выдвигаемые лестницы, так как они обычно расположены на спасательных транспортных средствах, в то же время это не должно пониматься в ограничивающем смысле, то есть настоящее изобретение также будет применимо к транспортным средствам, оборудованным надземными спасательными платформами, которые могут подниматься и поворачиваться. Более того, оно также не ограничено спасательными транспортными средствами, но может также применяться к любым другим технологическим транспортным средствам, оборудованным кранами или подобным, которые могут быть подвешены с одной стороны транспортного средства. В качестве такого средства безопасности очень распространенными стали поперечные наземные опоры, которые подняты с земли во втянутом неиспользуемом положении и могут быть выдвинуты в рабочее положение, в котором концы опор опираются на землю. Например, эти поперечные наземные опоры могут быть представлены выносными опорами, которые могут втягиваться или выдвигаться главным образом в горизонтальном направлении с тем, чтобы их концы располагались на расстоянии от корпуса транспортного средства в рабочем положении. Концы выносных опор могут быть оборудованы стойками, чтобы упираться в землю. Другая возможность состоитв небольшом наклоне выносной опоры вниз с тем, чтобы ее конец касался земли. Если такое касание выносных опор обеспечивается с обеих сторон транспортного средства, опорная область транспортного средства расширяется, обеспечивая транспортному средству надежное размещение. Третья возможность состоит в расположении опоры более или менее прямо на стороне корпуса транспортного средства, например, в форме стойки, как описано выше, с тем, чтобы опора просто поднималась, когда она не используется, и опускалась в свое рабочее положение. В дальнейшем описании термины «втянутый» и «выдвинутый» относительно наземной опоры не должны ограничивать ее работу в каком-либо пространственным направлением, например, горизонтальным или вертикальным, но будут просто означать, что опора выполнена с возможностью перемещения между двумя разными рабочими положениями на боковой стороне корпуса транспортного средства.
В ситуации спасения часто сложно найти оптимальное положение для спасательного транспортного средства, особенно на узких улицах между домами, припаркованными автомобилями и другими препятствиями. Соответственно, ценное время часто теряется при маневрировании транспортным средством. Главная проблема в данной ситуации состоит в нахождении положения, в котором наземные опоры могут быть перемещены в свои рабочие положения, не испытывая помех со стороны объектов. Более того, необходимо обращать внимание на то, чтобы не расположить концы опор на водостоках, крышках люков, мягких поверхностях земли, таких как газон, и так далее, так как они не обеспечивают твердую основу для опоры. Эти проблемы еще больше усугубляются тем фактом, что условия видимости обычно очень плохие, например, в темных условиях, и оператор не может видеть оцененные рабочие положения опор, и ему обычно требуется помощь другого человека, который наблюдает за маневрированием.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Цель настоящего изобретения состоит в предоставлении технологического транспортного средства вышеупомянутого типа, в частности, спасательного транспортного средства, такого как противопожарное транспортное средство, которое упрощает позиционирование опор в их рабочих положениях, даже в узком пространстве, в условиях плохой видимости и без помощи второго человека, чтобы экономить время для позиционирования транспортного средства.
Эта цель достигается посредством технологического транспортного средства, обладающего признаками по пункту 1 формулы изобретения.
Технологическое транспортное средство согласно настоящему изобретению оборудовано системой наблюдения для наблюдения за положением транспортного средства, включающего в себя наземные опоры. Эта система наблюдения содержит камеры наблюдения, расположенные на боковых сторонах транспортного средства. Каждая камера предназначена для одной опоры, чтобы наблюдать за областью земли, на которую будет опираться конец опоры в своем рабочем положении. То есть область поддержки опоры содержится в поле зрения соответствующей камеры. Каждая камера выполнена с возможностью снимать изображение в реальном времени соответствующей области земли. Для визуализации этого изображения предоставляется визуальный дисплей.
Визуальный дисплей представляет изображения со всех камер одновременно в разных областях экрана, на которые наложены визуальные метки, представляющие ожидаемые рабочие положения опор. Это означает, что на дисплее видны не только разные области земли, наблюдаемые камерами, но также конечные положения наземных опор до того, как они на самом деле перемещаются в эти положения. Следовательно, возможно распознать опасность столкновения с объектом или область земли, которая не пригодна для расположения опор того, как опоры на самом деле располагаются. Оператору, смотрящему на дисплей, предоставляется обзор всех областей, на которых должны быть размещены опоры. По этой причине оператор не нуждается в помощи другого человека, который напрямую наблюдает за положениями опор.
Визуальные метки могут обеспечиваться разными способами. Согласно одному из предпочтительных вариантов осуществления настоящего изобретения система наблюдения содержит блок управления для управления визуальным дисплеем, который выполнен с возможностью объединения данных изображений в реальном времени, создаваемых камерами, с рассчитанными или предварительно сохраненными данными, представляющими ожидаемые рабочие положения опор, чтобы создавать изображения из этих объединенных данных, на которых ожидаемые рабочие положения опор визуализируются посредством визуальных меток. В этом случае, визуальные метки создаются прямо в изображениях, чтобы быть отображенными на визуальном дисплее.
Согласно другому предпочтительному варианту осуществления изобретения, визуальные метки являются постоянными метками на экране визуального дисплея. В этом случае, метки не рассчитываются и не создаются из предварительно сохраненных данных, но представляют собой линии, точки или любой другой тип меток, которые закреплены на экране, на который электронным образом проецируется изображение. Согласно предпочтительному варианту осуществления настоящего изобретения, блок управления также выполнен с возможностью распознавать объекты в пределах поля зрения камеры.
Предпочтительно блок управления выполнен с возможностью отмечать объекты, распознанные в пределах поля зрения камеры, посредством визуальных меток. Это помогает замечать распознанные объекты, особенно в условиях плохой видимости.
Более предпочтительно блок управления выполнен с возможностью расчета расстояний между объектами, распознанными в пределах поля зрения камеры, и ожидаемым рабочим положением выносной опоры, настоящим рабочим положением опоры и/или частью корпуса транспортного средства и чтобы визуализировать рассчитанные расстояния в пределах изображения. Согласно другому предпочтительному варианту осуществления надземное устройство может поворачиваться вокруг вертикальной оси поворота, и блок управления выполнен с возможностью управления визуальным дисплеем, чтобы визуализировать положение оси поворота. Это облегчает маневрирование транспортным средством, чтобы переместить его в положение, которое является оптимальным для работы надземного устройства.
Более предпочтительно каждая камера закреплена на корпусе транспортного средства в поднятом положении над своей назначенной опорой с наклоненным вниз углом обзора. Соответствующее изображение, создаваемое посредством камеры, будет являться видом в перспективе на землю, показывающим рабочее положение опоры сверху.
Согласно другому предпочтительному варианту осуществления изобретения визуальный дисплей расположен внутри кабины водителя транспортного средства.
Изобретение дополнительно относится к способу позиционирования транспортного средства, в частности противопожарного транспортного средства, содержащего надземное устройство, такое как поворотная лестница и/или надземная спасательная платформа, и поперечные наземные опоры, выполненные с возможностью перемещения между втянутыми положениями и выдвинутыми рабочими положениями, в которых концы опор опираются на землю, содержащему этапы наблюдения за областью земли, на которую опирается конец опоры в его рабочем положении, посредством камеры наблюдения, которая предназначена для этой опоры, и отображения изображений со всех камер посредством визуального дисплея одновременно в разных областях экрана, на которые наложены визуальные метки, представляющие ожидаемые рабочие положения опор.
Предпочтительный вариант осуществления данного способа отличается объединением данных изображений в реальном времени, создаваемых камерами, с рассчитанными или предварительно сохраненными данными, представляющими ожидаемые рабочие положения опор, и созданием изображений из этих объединенных данных, на которых ожидаемые рабочие положения опор визуализируются посредством визуальных меток. Эти и другие аспекты изобретения станут очевидны из и разъяснены со ссылкой на предпочтительные варианты осуществления, описанные в дальнейшем в материалах настоящей заявки.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
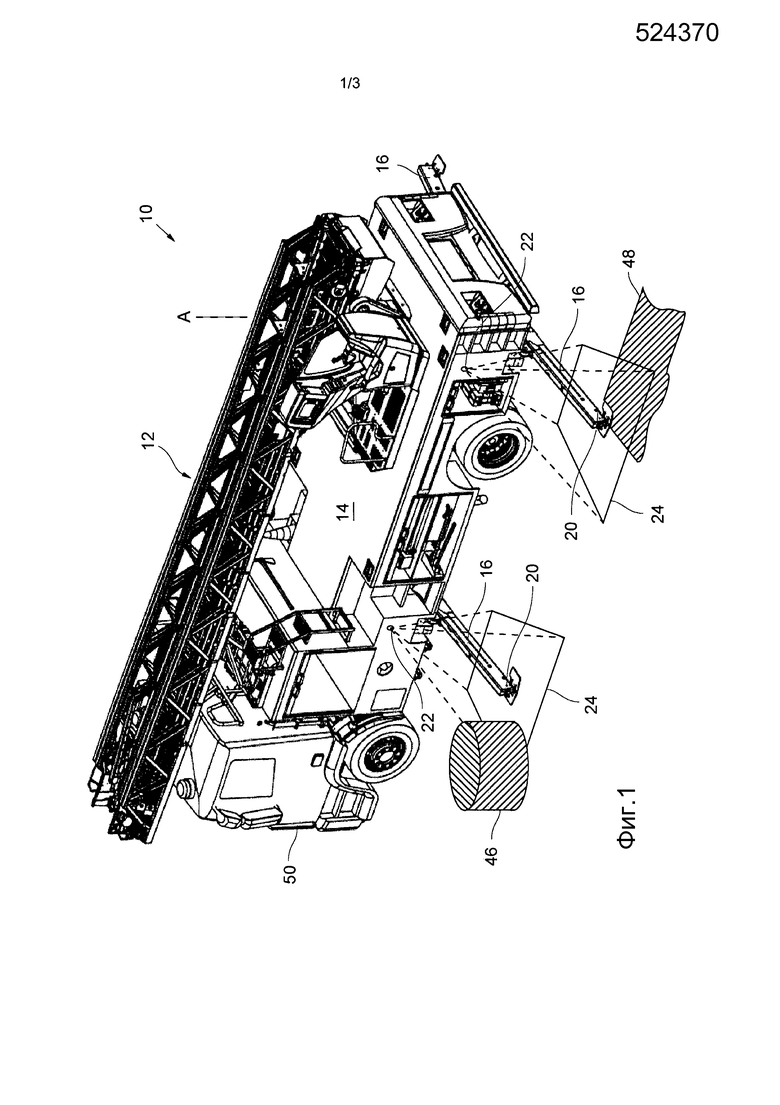
Фиг. 1 - вид в перспективе противопожарного транспортного средства в качестве одного из вариантов осуществления технологического транспортного средства согласно настоящему изобретению;
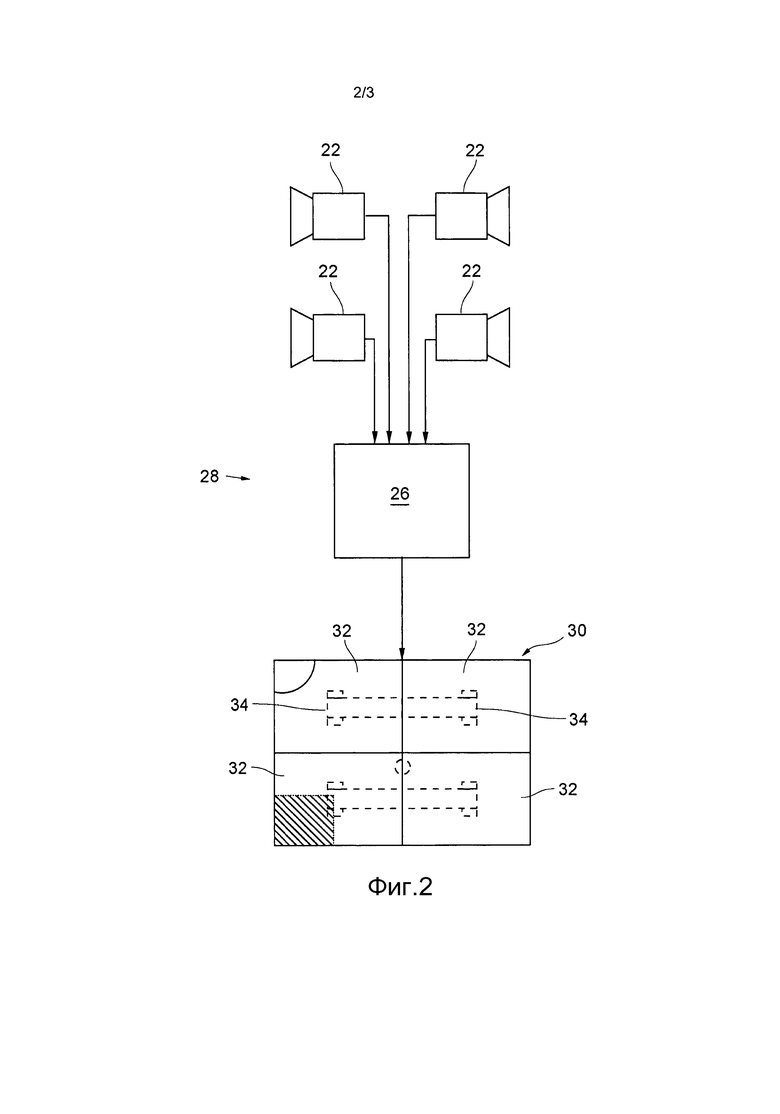
Фиг. 2 - схематический вид системы наблюдения технологического транспортного средства по пункту 1 формулы изобретения; и
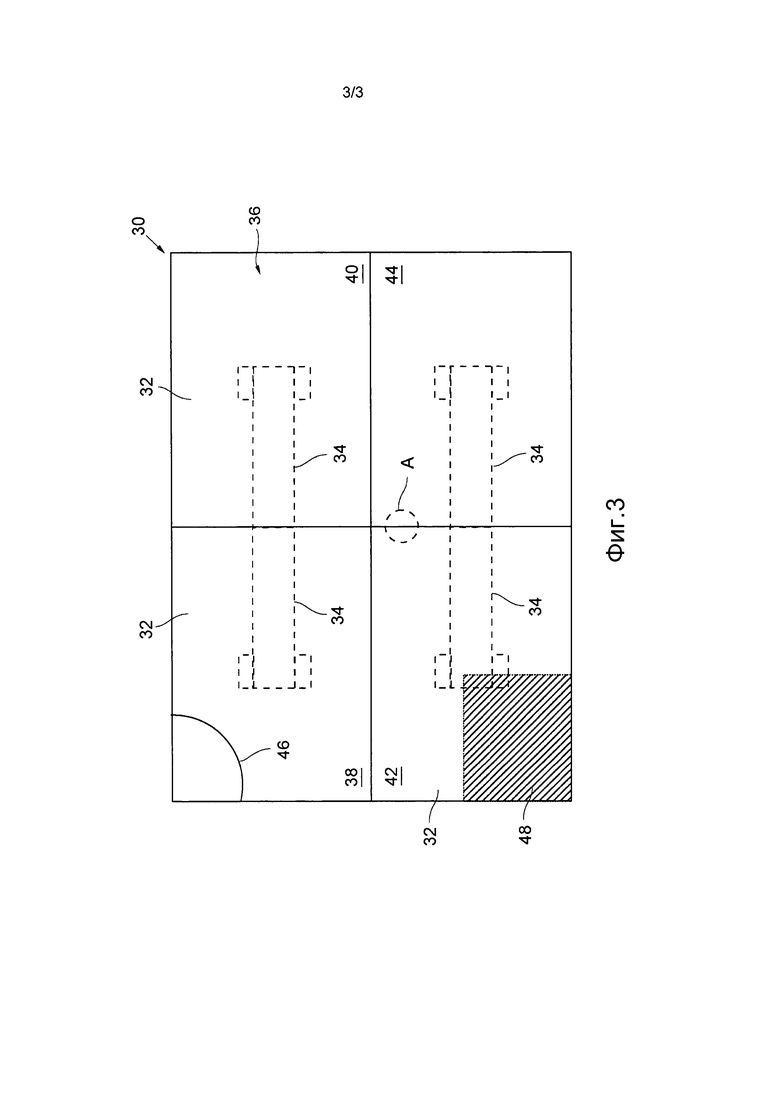
Фиг. 3 - схематический вид экранного дисплея в качестве одного из признаков системы наблюдения технологического транспортного средства по пункту 1 формулы изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Противопожарное транспортное средство 10 на фиг. 1 является одним из примеров технологических транспортных средств согласно настоящему изобретению. Противопожарное транспортное средство оборудовано поворотной лестницей 12 на своей верхней части, которая выполнена с возможностью поворота вокруг вертикальной оси A и содержит несколько сегментов лестницы, которые с возможностью скольжения поддерживаются друг на друге с тем, чтобы лестница 12 могла выдвигаться. Если это выдвижение поворотной лестницы 12 выполняется в положении, в котором лестница 12 повернута в поперечном направлении, то есть, вправо от неиспользуемого положения, показанного на фиг. 1, вес лестницы действует, чтобы наклонить корпус 14 транспортного средства вокруг его горизонтальной продольной оси. Чтобы безопасно поддерживать транспортное средство 10 на земле, таким образом, необходимо предоставить дополнительное опорное средство на боковых сторонах транспортного средства.
Наземные опоры 16 обеспечены на боковых сторонах корпуса 14 транспортного средства. Эти опоры 16 содержат балки 18, которые тянутся главным образом в горизонтальном направлении из нижней части корпуса 14 транспортного средства в поперечном направлении, то есть перпендикулярно направлению движения. Эти балки 18 являются выдвигаемыми с тем, чтобы опоры 16 могли перемещаться между втянутыми положениями, в которых выносные опоры 16 расположены под корпусом 14 транспортного средства так, чтобы они не выступали в поперечном направлении из транспортного средства, и выдвинутыми рабочими положениями, как показано на фиг. 1, в которых концы 20 опор 16 опираются на землю на расстоянии от соответствующих боковых сторон транспортного средства 10. Контакт с землей достигается посредством небольшого наклона опор 16 вниз, как в настоящем варианте осуществления транспортного средства 10, или посредством любого другого подходящего механизма. Очень общая конструкция опор 16 содержит стойки в их концах, которые имеют нижние контактные поверхности, которые могут быть прижаты к земле в рабочем положении. Тем не менее, настоящее изобретение не ограничено какой-либо конструкцией, но может относиться к любому подходящему поддерживающему механизму опор 16.
При позиционировании противопожарного транспортного средства 10 в ситуации спасения, маневрируя транспортным средством 10, может быть сложно найти положение, в котором опоры 16 могут найти подходящие рабочие положения. Это имеет место, так как рабочие положения должны быть оценены водителем транспортного средства 10, а это может быть сложно в узких местах с препятствиями в поперечной наземной области, такими как припаркованные автомобили, горшки с растениями и т. д. Другая сложность состоит в нахождении куска земли для поддержки концов 20 опор 16, который является достаточно твердым, чтобы сопротивляться силам, действующим на выносные опоры 16. Поверхности лужаек и т. д. не обеспечивают достаточное сопротивление. В частности, в ситуациях с плохой видимостью, водитель транспортного средства 10 часто не может наблюдать область для размещения концов 20 опор 16, соответственно, и ему нужна помощь другого человека для маневрирования транспортным средством 10 и выдвижения опор 16.
Эти проблемы обычных противопожарных транспортных средств преодолеваются посредством противопожарного транспортного средства 10 согласно настоящему изобретению, которое оборудовано системой наблюдения. Оно содержит камеры наблюдения на боковой стороне транспортного средства 10. В настоящем варианте осуществления имеется четыре опоры 16, а именно по две опоры с каждой стороны транспортного средства, расположенные на расстоянии, и также имеется четыре камеры 22 наблюдения, каждая камера 22, предназначенная для одной опоры 16. Соответствующая камера 22 закреплена на корпусе 14 транспортного средства в поднятом положении над его назначенной опорой 16, и ее угол обзора обеспечен с тем, чтобы он содержал область 24 земли, на которую конец 20 опоры 16 опирается в рабочем положении. Угол обзора камер 22 немного наклонен в нижнем направлении, чтобы обеспечить вид в перспективе сверху, содержал область 24 земли для размещения конца 20 опоры 16.
Каждая камера выполнена с возможностью создания набора данных изображений в реальном времени, представляющих текущее изображение соответствующей области 24 земли. Другими словами, каждая камера 22 снимает изображение в реальном времени области 24 земли.
Для обработки наборов данных изображений, создаваемых камерами 22, система наблюдения дополнительно содержит блок 26 управления, схематически показанный на фиг. 2, которая дополнительно показывает другие компоненты системы 28 наблюдения, а именно камеры 22 и визуальный дисплей 30 для показа изображений 32, соответствующих данным изображений с камер 22, которые обрабатываются блоком 26 управления. Из каждого набора данных изображений, предоставляемых одной камерой 22, соответствующих картине наблюдаемой области 24 земли в поле зрения камеры, блок 26 управления создает изображение 32. Однако изображение 32 показывает не только область 24 земли, но также и ожидаемые рабочие положения выносных опор 16 в виде визуальных меток 34. Эти метки 34 могут быть созданы из предварительно сохраненных данных, представляющих ожидаемые рабочие положения опор, или из рассчитанных данных, представляющих эти ожидаемые рабочие положения. Блок 26 управления выполнен с возможностью объединения данных изображений в реальном времени, создаваемых камерами 22, с рассчитанными или предварительно сохраненными данными, связанными с ожидаемыми рабочими положениями опор 16, чтобы создавать изображения 32 из этих объединенных данных, на которых ожидаемые рабочие положения опор 16 визуализируются посредством визуальных меток 34, наложенных на изображение области 24 земли.
Другой вариант состоит в постоянном закреплении визуальных меток 34 на экране визуального дисплея 30 и в создании электронного изображения 32 посредством дисплея 30 так, чтобы накладывались как изображение 32, так и постоянные метки 34. Ожидаемые рабочие положения опор 16, которые четко определены в пределах поля зрения камеры 22, могут быть связаны с настоящим положением транспортного средства 10 на земле, чтобы предусмотреть возможные столкновения опор 16 с препятствием в области 24 земли или чтобы оценить состояние земли с тем, чтобы избежать размещения конца 20 опоры 16 на мягкой земле. В частности, отметим, что визуальные метки 34 позволяют оператору, например, водителю транспортного средства, предвидеть рабочее положение выносной опоры 16 перед тем, как опора 16 достигнет этого положения, перед выдвижением опоры 16 из ее втянутого положения, чтобы избежать столкновения или любой другой ошибки в размещении опоры 16.
Как более подробно показано на фиг. 3, которая является примерным снимком экрана визуального дисплея в качестве одного из примеров, изображения 32 всех камер 22 показаны одновременно в виде разделенного экрана. Вся поверхность 34 экрана разделена на четыре части равной высоты и ширины. Верхняя левая область 38 показывает изображение 32, соответствующее передней левой камере 22 над передней левой опорой 16 транспортного средства 10, верхняя правая область 40 соответствует передней правой камере 22, нижняя левая область 42 соответствует задней левой камере 22, а оставшаяся нижняя левая область 44 соответствует задней правой камере 22. Визуальные метки 34, показывающие ожидаемые рабочие положения опор 16, также показаны на соответствующих изображениях в областях 38, 40, 42, 44. Когда выносная опора в конечном счете достигнет своего выдвинутого рабочего положения, оно будет соответствовать визуальной метке 34. Реальная картина выносной опоры 16, входящей в поле зрения камеры 22, будет очевидна на изображении 32, снимаемом камерой 32. Более того, объекты в поле зрения камеры, например, препятствия на области 24 земли, также будут видны на этом изображении 32. В качестве одного примера такого объекта, который также показан на фиг. 1, горшок 46 с растением в пределах области 24 земли, на которой поддерживается конец 20 передней левой опоры 16, показан на изображении 32 области 38 экрана. В этом случае оператор сможет оценить, будет ли столкновение опоры 16 с объектом 46, посредством оценки расстояния между концом визуальной метки 34 и объектом 46. Эта оценка также может поддерживаться посредством пометки объекта 46 соответствующей визуальной меткой. Более того, расстояние между концом визуальной метки 34 опоры 16 и объектом 46 (или его визуальной меткой, соответственно), может быть рассчитано посредством блока 26 управления и визуализировано посредством отображения рассчитанного расстояния на изображении. Также возможно рассчитывать другие расстояния посредством блока 26 управления, например, расстояние между объектом 46 и корпусом 14 транспортного средства и/или расстояние между текущим рабочим положением опоры 16 и объектом 46 (которое должно быть отделено от ожидаемого рабочего положения опоры, представленного визуальной меткой 34).
Если область 24 земли включает в себя участок мягкой земли, который не пригоден для размещения конца 20 опоры 16, это также будет видно на соответствующем изображении 32 в случае, если визуальная метка 34 ожидаемого рабочего положения опоры 16 и непригодный участок области земли перекрываются. Например, в нижней левой области 42 экрана показан участок 48 газона, который захвачен камерой 22 в задней левой части транспортного средства 10. Этот участок 48 газона (смотрите также фиг. 1) перекрывается с концом визуальной метки 34, что означает, что будет иметь место ошибка позиционирования, которая должна быть исправлена водителем транспортного средства 10 посредством маневрирования транспортным средством 10. Другие непригодные области могут включать в себя крышки люков канализационной сети, водостоки или подобное. В одном из возможных вариантов, камеры 22 обеспечиваются инфракрасными датчиками, чтобы обеспечить хорошую видимость даже в темных условиях с плохой видимостью.
Для размещения противопожарного транспортного средства 10 таким образом, чтобы поворотная лестница 12 могла использоваться без столкновения с препятствиями, полезно визуализировать вертикальную ось A поворота (фиг. 1) поворотной лестницы 12 на визуальном дисплее 30. На фиг. 3, эта ось A отмечена на экране 36 между левой и правой нижними областями 42 и 44 экрана, показывая положение вертикальной оси A относительно ожидаемых рабочих положений опор 16. Также возможно рассчитывать расстояние между осью A и любыми препятствиями в окрестности транспортного средства 10, например, расстояние до стены рядом с транспортным средством 10, и отображать это расстояние в виде числа или любой визуальной метки. Также возможно выделять все метки на соответствующих изображениях 32, включающие в себя визуальные метки 34 ожидаемого рабочего положения опоры 16, визуальную метку, показывающую объект 46 или любой участок 48 земли, в соответствии с решением о том, имеется ли перекрывание между визуальной меткой 34 и любой другой из меток. Это решение может приниматься блоком 26 управления. Такой признак выделения может интерпретироваться в качестве предупреждения оператору, чтобы избегать любых столкновений или ошибок позиционирования. В случае такого перекрывания меток, указывающего на столкновение или любую другую ошибку позиционирования, также может применяться звуковое предупреждение оператора.
Как описано выше, все изображения 32, созданные из данных изображений в реальном времени, предоставляемых камерами 22, показываются одновременно в виде разделенного экрана на визуальном дисплее. Это позволяет оператору оценивать позиционирование опор 16 на разных участках вокруг транспортного средства 10 одновременно, без необходимости менять его собственное положение, чтобы наблюдать разные участки 24 земли своими глазами без технических средств. Визуальный дисплей 30 может быть установлен в кабине 50 водителя (фиг. 1) транспортного средства 10 с тем, чтобы водитель мог видеть визуальный дисплей 30 с разделенным экраном, показывающим все четыре изображения 32 в разных областях 38, 40, 42, 44 поверхности 36 экрана, и маневрировать транспортным средством 10 одновременно.
Настоящее изобретение применимо не только к противопожарным транспортным средствам 10, но также к любым другим технологическим транспортным средствам, особенно к тем, которые содержат надземные устройства, такие как поворотная лестница или надземная платформа, на верхней части.
Изобретение относится к технологическому транспортному средству. Противопожарное транспортное средство содержит надземное устройство и поперечные наземные опоры, выполненные с возможностью перемещения между втянутыми положениями и выдвинутыми рабочими положениями, в которых концы опор опираются на землю. Транспортное средство содержит систему наблюдения для наблюдения за положением транспортного средства. Система содержит камеры наблюдения на сторонах транспортного средства, каждая камера, предназначенная для одной опоры, чтобы наблюдать за областью земли, на которую опирается конец этой опоры в рабочем положении, и снимать изображение в реальном времени соответствующей области земли. Система также содержит визуальный дисплей, представляющий изображения со всех камер одновременно в разных областях экрана, на которые наложены визуальные метки, представляющие ожидаемые рабочие положения опор. Достигается упрощение позиционирования опор в условиях плохой видимости без присутствия человека. 2 н. и 10 з.п. ф-лы, 3 ил.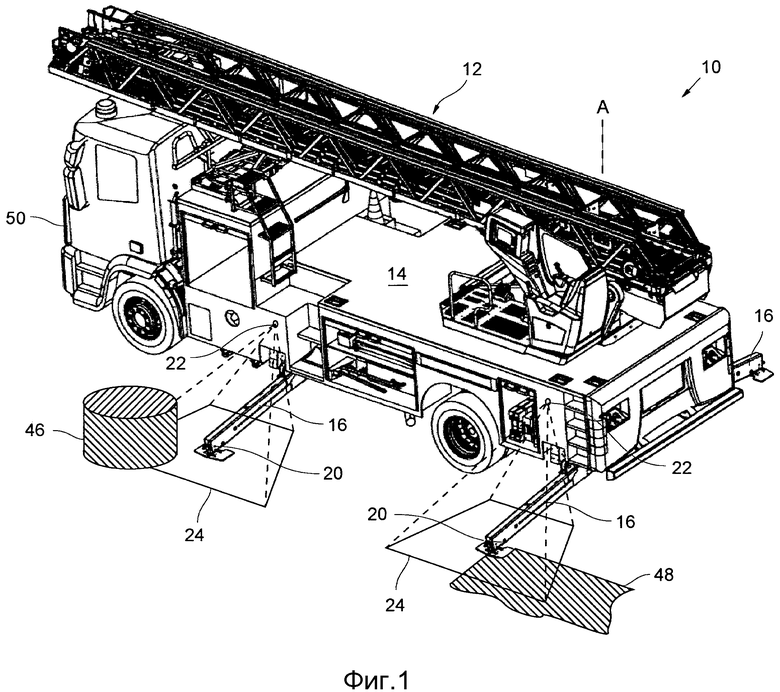
1. Технологическое транспортное средство, в частности противопожарное транспортное средство (10), содержащее надземное устройство, такое как поворотная лестница (12) и/или надземная спасательная платформа, и поперечные наземные опоры (16), выполненные с возможностью перемещения между втянутыми положениями и выдвинутыми рабочими положениями, в которых концы опор (16) опираются на землю, отличающееся системой (28) наблюдения для наблюдения за положением транспортного средства (10), содержащей
камеры (22) наблюдения на сторонах транспортного средства (10), каждая камера (22) предназначена для одной опоры (16), чтобы наблюдать за областью (24) земли, на которую опирается конец (20) этой опоры (16) в рабочем положении, и снимать изображение (32) в реальном времени соответствующей области (24) земли,
и визуальный дисплей (30), представляющий изображения (32) со всех камер (22) одновременно в разных областях экрана, на которые наложены визуальные метки (34), представляющие ожидаемые рабочие положения опор (16).
2. Технологическое транспортное средство по п. 1, отличающееся тем, что упомянутая система (28) наблюдения содержит блок (26) управления для управления визуальным дисплеем (30),
упомянутый блок (26) управления выполнен с возможностью объединения данных изображений в реальном времени, создаваемых камерами (22), с рассчитанными или предварительно сохраненными данными, представляющими ожидаемые рабочие положения опор (16), чтобы создавать изображения (32) из этих объединенных данных, на которых ожидаемые рабочие положения опор (16) визуализируются посредством визуальных меток (34).
3. Технологическое транспортное средство по п. 1, отличающееся тем, что визуальные метки (34) являются постоянными метками на экране визуального дисплея (30).
4. Технологическое транспортное средство по п. 1, отличающееся тем, что блок (26) управления выполнен с возможностью распознавания объектов (46) в пределах поля зрения камеры (22).
5. Технологическое транспортное средство по п. 4, отличающееся тем, что блок (26) управления выполнен с возможностью отмечать объекты (46), распознанные в пределах поля зрения камеры (22), посредством визуальных меток.
6. Технологическое транспортное средство по п. 4, отличающееся тем, что блок (26) управления выполнен с возможностью расчета расстояний между объектами (46), распознанными в пределах поля зрения камеры (22), и ожидаемым рабочим положением опоры (16), настоящим рабочим положением опоры (16) и/или частью корпуса (14) транспортного средства, и визуализации рассчитанных расстояний в пределах изображения (32).
7. Технологическое транспортное средство по п. 1, отличающееся тем, что надземное устройство является поворотным вокруг вертикальной оси (A) поворота и что блок (26) управления выполнен с возможностью управления визуальным дисплеем (30) для визуализации положения оси (A) поворота.
8. Технологическое транспортное средство по п. 1, отличающееся тем, что каждая камера (22) закреплена на корпусе (14) транспортного средства в поднятом положении над своей назначенной опорой (16) с наклоненным вниз углом обзора.
9. Технологическое транспортное средство по п. 1, отличающееся тем, что камеры (22) снабжены инфракрасными датчиками.
10. Технологическое транспортное средство по п. 1, отличающееся тем, что визуальный дисплей (30) расположен внутри кабины (50) водителя транспортного средства (10).
11. Способ позиционирования технологического транспортного средства, в частности противопожарного транспортного средства (10), содержащего надземное устройство, такое как поворотная лестница (12) и/или надземная спасательная платформа, и поперечные наземные опоры (16), выполненные с возможностью перемещения между втянутыми положениями и выдвинутыми рабочими положениями, в которых концы опор (16) опираются на землю, отличающийся следующими этапами:
- наблюдают за областью (24) земли, на которую опирается конец опоры (16) в его рабочем положении, посредством камеры (22) наблюдения, которая предназначена для этой опоры (16),
- и отображают изображения (32) со всех камер (22) посредством визуального дисплея (30) одновременно в разных областях экрана, на которые наложены визуальные метки (34), представляющие ожидаемые рабочие положения опор (16).
12. Способ по п. 11, отличающийся тем, что объединяют данные изображений в реальном времени, создаваемые камерами (22), с рассчитанными или предварительно сохраненными данными, представляющими ожидаемые рабочие положения опор (16), и создают изображения (32) из этих объединенных данных, на которых ожидаемые рабочие положения опор (16) визуализируются посредством визуальных меток (34).
| JP 2009073248 A, 09.04.2009 | |||
| JP 2008074594 A, 03.04.2008 | |||
| US 20060076189 A, 13.04.2006 | |||
| Регулирующий клапан | 1958 |
|
SU124256A1 |

