Изобретение относится к способам определения шумов в измерительной информации чувствительных элементов инерциальных навигационных систем с использованием метода вариации Аллана и может быть использовано при апостериорной обработке показаний инерциальных измерителей с целью получения качественных и количественных оценок основных шумовых характеристик чувствительных элементов инерциальных навигационных систем по результатам испытаний.
Известен способ оценки шумовых составляющих в измерительной информации, описанный в руководстве «IEEE Recommended Practice for Inertial Sensor Test Equipment, Instrumentation, Data Acquisition, and Analysis» (2013 г., стр. 1-145, DOI: 10.1109 / IEEESTD. 2013.6673990), заключающийся в идентификации пяти типовых шумовых составляющих в измерительной информации путем нахождения соответствующих коэффициентов полиномиальной аппроксимации  кривой вариации Аллана
кривой вариации Аллана  :
:

При этом коэффициенты R2, K2, В2, N2 и Q2 аппроксимирующего полинома находят с использованием метода наименьших квадратов.
Недостатком данного способа является то, что на практике применение метода наименьших квадратов может дать некорректный результат в виде отрицательных значений при оценке заведомо положительных коэффициентов аппроксимирующего полинома вида (1). В этом случае применение метода наименьших квадратов не позволяет дать физическую интерпретацию результатов оценки шумовых составляющих в измерительной информации.
Известен метод определения шумовых коэффициентов с использованием метода вариации Аллана из патента CN №103345569 «Noise coefficient computing method used for Allan variance analysis technology» с датой приоритета 01.06.2013 г. (прототип), заключающийся в специальной итерационной процедуре условной оптимизации на основе метода наименьших квадратов, исключающего возможность получения отрицательных значений коэффициентов аппроксимирующего полинома вида(1).
Недостатками данного метода являются сложность процедуры осуществления из-за отсутствия явно заданного критерия оптимизации и низкая достоверность из-за отсутствия сведений о точности получаемых оценок шумовых коэффициентов.
Технические результаты заявляемого способа заключаются в упрощении процедуры осуществления и повышении достоверности определения шумовых составляющих в измерительной информации чувствительных элементов инерциальных навигационных систем за счет задания явного критерия оптимизации.
Упрощение и повышение достоверности определения шумовых составляющих в измерительной информации чувствительных элементов инерциальных навигационных систем достигаются даже в условиях отсутствия начальных сведений о предполагаемом уровне оцениваемых шумов.
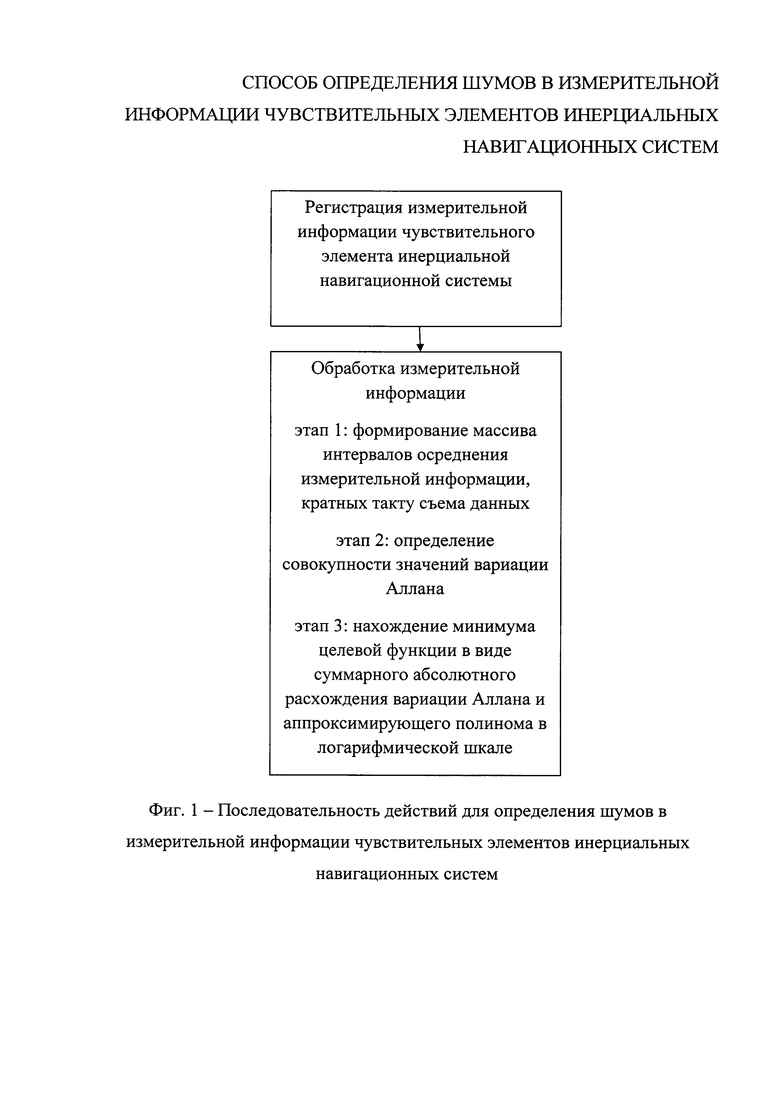
Технические результаты достигаются за счет того, что проводят регистрацию и обработку измерительной информации каждого чувствительного элемента инерциальной навигационной системы. При этом на первом этапе обработки измерительной информации формируют массив интервалов осреднения информации, кратных такту съема данных. На втором этапе обработки измерительной информации определяют совокупность значений вариации Аллана, соответствующих интервалам осреднения измерительной информации чувствительного элемента инерциальной навигационной системы, как квадрат среднего квадратического относительного двухвыборочного отклонения измерительной информации. На третьем этапе обработки измерительной информации полученную совокупность значений вариации Аллана аппроксимируют полиномом со степенями -2, -1, 0, +1, +2. Подбор коэффициентов аппроксимирующего полинома осуществляется путем минимизации в логарифмической шкале его суммарного абсолютного расхождения со значениями вариации Аллана.
Предложенный способ может быть реализован в соответствии с фигурой 1.
Производится регистрация измерительной информации с чувствительного элемента для оценки шумовых составляющих в измерительной информации чувствительного элемента инерциальной навигационной системы.
Затем на первом этапе формируется массив интервалов осреднения измерительной информации {τk}, кратных такту съема измерительной информации.
Для сокращения времени расчета вариации Аллана  формируется массив интервалов осреднения информации с более широким шагом исходя из равномерности осреднения в логарифмической шкале в соответствии с формулой:
формируется массив интервалов осреднения информации с более широким шагом исходя из равномерности осреднения в логарифмической шкале в соответствии с формулой:

где Δt - такт съема измерительной информации,
Δs - коэффициент для формирования набора из совокупности интервалов осреднения измерительной информации (0<Δs≤1),
 - операция взятия целой части числа путем отбрасывания его дробной части,
- операция взятия целой части числа путем отбрасывания его дробной части,
L - общее количество опросов измерительной информации.
Например, для Δs=0.1 время расчета сокращается примерно в 103 раз при обработке данных, записанных на трехчасовом интервале наблюдения с шагом съема информации 0.004 с. При этом потеря точности при данном способе формирования массива интервалов осреднения информации не превышает 1%.
На втором этапе осуществляется расчет вариации Аллана по полученной измерительной информации в соответствии с формулой:

где  - количество опросов на интервале осреднения
- количество опросов на интервале осреднения  ,
,
ΔN(ti) - выходной сигнал чувствительного элемента на момент опроса ti.
Третий этап заключается в минимизации суммарного абсолютного расхождения значений вариации Аллана и аппроксимирующего полинома в логарифмической шкале по набору из пяти коэффициентов R2, K2, В2, N2 и Q2 полинома в соответствии с целевой функцией вида (4):

где Δt=(tk+1-tk) - шаг съема измерительной информации (интервал времени между моментами опроса tk и tk+1),
τk - интервал осреднения измерительной информации, кратный Δt; для равномерного шага построения кривой вариации Аллана τk=k⋅Δt,  ,
,
Т=L/Δt - количество данных в обрабатываемом наборе измерительной информации.
Шаг подбора коэффициентов R2, K2, В2, N2 и Q2 аппроксимирующего полинома кривой вариации Аллана при минимизации суммарного абсолютного расхождения (4) выбирается исходя из допустимого уровня точности определения коэффициентов.
Предлагаемая целевая функция (4) включает в себя уровень достоверности вариации Аллана , рассчитываемый в соответствии с руководством «IEEE Std 952-1997. IEEE Standard Specification Format Guide and Test Procedure for Single-Axis Interferometric Fiber Optic Gyros» по формуле (5), что позволяет повысить точность оценок шумов в измерительной информации:

где σB(τ) - среднее квадратическое отклонение относительной погрешности значений σA(τ).
Минимизацию проводят посредством использования стандартных способов многопараметрической оптимизации.
Упрощение и повышение достоверности определения шумовых составляющих в измерительной информации чувствительных элементов инерциальных навигационных систем достигается за счет минимизации нелинейной целевой функции в виде суммарного абсолютного расхождения вариации Аллана и аппроксимирующего полинома в логарифмической шкале. При этом совокупность значений вариации Аллана, соответствующих интервалам осреднения измерительной информации чувствительного элемента инерциальной навигационной системы, определяется как квадрат среднего квадратического относительного двухвыборочного отклонения измерительной информации; совокупность значений вариации Аллана аппроксимируют полиномом со степенями -2, -1, 0, +1, +2 в модуле аппроксимации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕМПЕРАТУРНЫХ ЗАВИСИМОСТЕЙ МАСШТАБНЫХ КОЭФФИЦИЕНТОВ, СМЕЩЕНИЙ НУЛЯ И МАТРИЦ ОРИЕНТАЦИИ ОСЕЙ ЧУВСТВИТЕЛЬНОСТИ ЛАЗЕРНЫХ ГИРОСКОПОВ И МАЯТНИКОВЫХ АКСЕЛЕРОМЕТРОВ В СОСТАВЕ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА ПРИ СТЕНДОВЫХ ИСПЫТАНИЯХ | 2014 |
|
RU2566427C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДЕЛЬНОЙ ТОЧНОСТИ ОЦЕНКИ МИКРОСЕЙСМИЧЕСКОГО КВАЗИСТАЦИОНАРНОГО ШУМОВОГО ФОНА | 2021 |
|
RU2759974C1 |
| Способ измерения ошибок начальной выставки инерциальной навигационной системы без привязки к внешним ориентирам | 2021 |
|
RU2779274C1 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
| Комплексный способ навигации летательных аппаратов | 2016 |
|
RU2646957C1 |
| Способ комплексирования бесплатформенных инерциальных навигационных систем | 2019 |
|
RU2708901C1 |
| СПОСОБ КОМПЕНСАЦИИ СИСТЕМАТИЧЕСКОЙ СОСТАВЛЯЮЩЕЙ ДРЕЙФА НУЛЕВОГО СИГНАЛА ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2019 |
|
RU2695439C1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| Способ калибровки погрешностей инерциального измерительного блока на базе лазерных гироскопов с использованием динамического стенда | 2021 |
|
RU2803878C2 |
| СПОСОБ НАВИГАЦИИ КОСМИЧЕСКОГО АППАРАТА ПО НЕБЕСНЫМ ИСТОЧНИКАМ ПЕРИОДИЧЕСКОГО ИЗЛУЧЕНИЯ | 2011 |
|
RU2453813C1 |
Изобретение относится к способам определения шумов в измерительной информации чувствительных элементов инерциальных навигационных систем с использованием метода вариации Аллана и может быть использовано при апостериорной обработке показаний инерциальных измерителей с целью получения качественных и количественных оценок основных шумовых характеристик чувствительных элементов инерциальных навигационных систем по результатам испытаний. Техническим результатом является упрощение процедуры осуществления и повышение достоверности определения шумовых составляющих в измерительной информации чувствительных элементов инерциальных навигационных систем. Способ содержит этапы, на которых проводят регистрацию и обработку измерительной информации каждого чувствительного элемента инерциальной навигационной системы. При этом на первом этапе обработки измерительной информации формируют массив интервалов осреднения информации, кратных такту съема данных. На втором этапе обработки определяют совокупность значений вариации Аллана, соответствующих интервалам осреднения измерительной информации чувствительного элемента инерциальной навигационной системы, как квадрат среднего квадратического относительного двухвыборочного отклонения измерительной информации. На третьем этапе обработки полученную совокупность значений вариации Аллана аппроксимируют полиномом со степенями -2, -1, 0, +1, +2. Подбор коэффициентов аппроксимирующего полинома осуществляется путем минимизации в логарифмической шкале его суммарного абсолютного расхождения со значениями вариации Аллана. 2 з.п. ф-лы, 1 ил.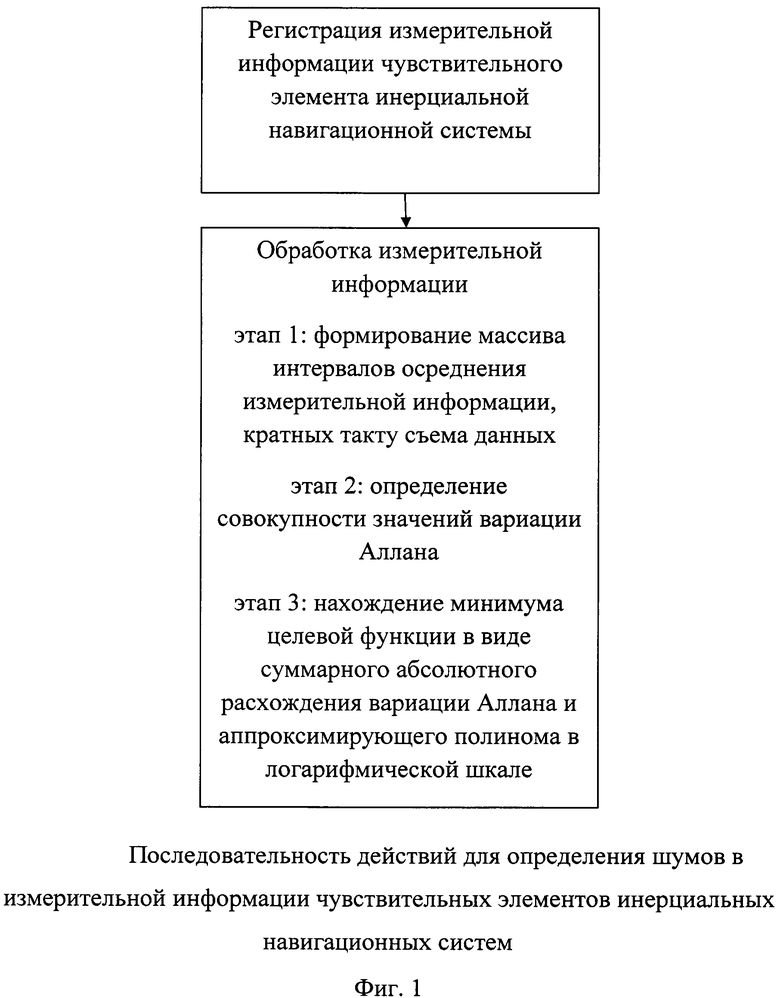
1. Способ определения шумов в измерительной информации чувствительных элементов инерциальных навигационных систем, заключающийся в регистрации и обработке измерительной информации, отличающийся тем, что на первом этапе обработки измерительной информации формируют массив интервалов осреднения исходя из кратности такту съема измерительной информации, на втором этапе обработки измерительной информации для выбранного набора интервалов осреднения определяют совокупность значений вариации Аллана, как квадрат среднего квадратического относительного двухвыборочного отклонения измерительной информации, на третьем этапе обработки измерительной информации совокупность значений вариации Аллана аппроксимируют полиномом со степенями -2, -1, 0, +1, +2, при этом подбор коэффициентов аппроксимирующего полинома осуществляют путем минимизации в логарифмической шкале его суммарного абсолютного расхождения со значениями вариации Аллана.
2. Способ по п. 1, отличающийся тем, что интервалы осреднения измерительной информации выбирают исходя из равномерного изменения их длины в логарифмической шкале.
3. Способ по п. 1, отличающийся тем, что выбор интервалов осреднения измерительной информации {τk} производят по формуле:

где Δt - такт съема измерительной информации,
Δs - коэффициент для формирования набора из совокупности интервалов осреднения измерительной информации (0<Δs≤1),
[…]ЦЧ - операция взятия целой части числа путем отбрасывания его дробной части,
L - общее количество опросов измерительной информации.
| КУТОВОЙ Д.А | |||
| и др | |||
| "ОЦЕНКА ОСНОВНЫХ ХАРАКТЕРИСТИК БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО БЛОКА С ИСПОЛЬЗОВАНИЕМ ВАРИАЦИИ АЛЛАНА" в: ВЕСТНИК САМАРСКОГО ГОСУДАРСТВЕННОГО АЭРОКОСМИЧЕСКОГО УНИВЕРСИТЕТА, 2014, N 1(43), с | |||
| Питательное приспособление к трепальным машинам для лубовых растений | 1922 |
|
SU201A1 |
| CN 103345569 A, 09.10.2013 | |||
| CN 103674062 A, 26.03.2014 | |||
| CN 103033198 A, 10.04.2013 | |||
| RU 2013146863 A, 27.04.2015 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА | 2014 |
|
RU2560742C1 |

