Изобретение относится к области приборостроения, в частности к инерциальным навигационным системам, и может быть использовано для определения температурных зависимостей характеристик трехосного лазерного гироскопа (ЛГ) и маятниковых акселерометров (МА) в составе инерциального измерительного блока (ИИБ) при стендовых испытаниях, в частности масштабных коэффициентов датчиков вращения ЛГ и МА, смещений нуля датчиков вращения ЛГ и МА, матриц направляющих косинусов осей чувствительности ЛГ и МА в ортогональной системе координат, жестко связанной с корпусом ИИБ.
Известен способ [RU 2488776 C1, G01C 25/00, 27.07.2013], заключающийся в калибровке систематических значений параметров модели ошибок трехосного лазерного гироскопа, в том числе систематических составляющих смещения нулей, причем калибровку смещений нулей трехосных лазерных гироскопов с одним общим вибратором производят не по непосредственным показаниям трехосных лазерных гироскопов - приращениям интегралов проекций вектора абсолютной угловой скорости на оси чувствительности, а по результирующей погрешности определения пространственной ориентации посредством бесплатформенной инерциальной системы ориентации на основе трехосных лазерных гироскопов с одним общим вибратором.
Недостатком способа является его относительно узкая область применения.
Наиболее близким по технической сущности к предложенному является способ [RU 2505785 C1, G01C 21/24, 27.01.2014], включающий измерения кажущихся ускорений движущегося в инерциальном пространстве объекта-носителя и жестко связанного с ним отделяемого объекта, производимые акселерометрами эталонной инерциальной навигационной системы объекта-носителя в базовой инерциальной системе координат (БИСК) и акселерометрами ведомой инерциальной навигационной системы отделяемого объекта в приборной инерциальной системе координат (ПИСК), которая образуется осями чувствительности акселерометров ведомой ИНС, передачи с определенной периодичностью результатов измерений акселерометров эталонной ИНС носителя в вычислительное устройство (ВУ) отделяемого объекта, причем в ходе движения, начиная с некоторого момента ti, по измерениям акселерометров эталонной ИНС и ведомой ИНС, накапливают кажущиеся скорости до достижения модулем вектора кажущейся скорости, получаемой по показаниям акселерометров ведомой ИНС, заданного значения, в этот момент ti+1 фиксируют в ВУ отделяемого объекта компоненты векторов кажущейся скорости, накопленные на интервале [ti, ti+1] по показаниям эталонной ИНС и ведомой ИНС, по этим данным определяют и запоминают в ВУ отделяемого объекта ошибку модуля вектора кажущейся скорости, вызванную погрешностями измерений ведомой инерциальной навигационной системы, и относительные проекции трех векторов кажущейся скорости, сформированные по показаниям каждого отдельного акселерометра ведомой ИНС, на орт кажущейся скорости, накопленной по показаниям акселерометров эталонной ИНС, повторяют такие действия не менее чем на двух интервалах активного движения, характеризующихся взаимно неколлинеарными направлениями накапливаемых на них и на первом интервале векторов кажущейся скорости, по показаниям акселерометров эталонной ИНС объекта-носителя и ведомой ИНС отделяемого объекта, накопленным хотя бы на одном участке движения [t1 п,t2 п], характеризующимся малыми значениями перегрузок по осям БИСК и достаточной продолжительностью участка, определяют в ВУ отделяемого объекта ошибки кажущейся скорости по осям чувствительности каждого акселерометра ведомой ИНС, вызванные совокупным влиянием погрешностей измерений этой ИНС, значение ошибки каждого акселерометра делят на величину интеграла от функции влияния погрешности измерений соответствующего акселерометра, независящей от перегрузки, на погрешность накапливаемой на интервале [t1 п,t2 п] по оси чувствительности данного акселерометра кажущейся скорости, тем самым определяют и запоминают параметры погрешностей измерений каждого акселерометра, независящие от перегрузки, из запомненных ошибок модулей измеренной кажущейся скорости, полученных не менее чем на трех интервалах активного движения, характеризующихся значительными перегрузками, вычитают результаты умножений значений параметров погрешностей, не зависящих от перегрузки, на величины интегралов от функции влияния данного параметра каждого акселерометра ведомой ИНС на ошибку модуля кажущейся скорости, набранной на соответствующем интервале активного движения, и определяют тем самым значения правых частей системы линейных уравнений для параметров погрешностей измерений акселерометров, зависящих от перегрузки, решают линейную систему, определяют из нее и запоминают значения параметров погрешностей измерений акселерометров, зависящих от перегрузки, по найденным значениям не зависящих и зависящих от перегрузки параметров погрешностей каждого акселерометра ведомой ИНС уточняют получаемые от этих акселерометров текущие значения кажущихся ускорений и используют их при численном интегрировании в реальном масштабе времени основного уравнения инерциальной навигации навигационной траектории отделяемого объекта.
Недостатком наиболее близкого технического решения также является его относительно узкая область применения, поскольку известный способ, хотя и позволяет определить параметры модели погрешностей измерений измерительных приборов инерциальной навигационной системы, но не позволяет определить температурные зависимости характеристик трехосного лазерного гироскопа (ЛГ) и маятниковых акселерометров (МА) в составе инерциального измерительного блока (ИИБ), в частности, масштабных коэффициентов датчиков вращения ЛГ и МА, смещений нуля датчиков вращения ЛГ и МА, матриц направляющих косинусов осей чувствительности ЛГ и МА в ортогональной системе координат, жестко связанной с корпусом ИИБ.
Задачей, на решение которой направлено предложенное изобретение, является расширение области применения.
Требуемый технический результат заключается в расширении области применения путем введения дополнительного арсенала технических средств (операций способа), обеспечивающих определение температурных зависимостей характеристик трехосного лазерного гироскопа и маятниковых акселерометров в составе инерциального измерительного блока.
Поставленная задача решается, а требуемый технический результат достигается в способе, основанном на том, что устанавливают на стенде инерциальный измерительный блок с трехосным лазерным гироскопом и тремя маятниковыми акселерометрами, оси чувствительности которых ориентируют в направлении соответствующих осей собственной системы координат инерциального измерительного блока, для которого при одной единственной температуре лазерного гироскопа известна матрица ориентации осей чувствительности датчиков вращения в собственной системе координат инерциального измерительного блока, на каждом такте измерений определяют количество импульсов для каждого из трех датчиков вращения лазерного гироскопа, пропорциональное проекции вектора угла поворота лазерного гироскопа за один такт измерений на каждую из трех осей чувствительности лазерного гироскопа, определяют средние за один такт измерений значения напряжений на выходе каждого из трех маятниковых акселерометров, пропорциональные проекциям вектора кажущегося линейного ускорения на оси чувствительности маятниковых акселерометров, и средние за один такт измерений значения температуры на каждом из трех датчиков вращения трехосного лазерного гироскопа и трех маятниковых акселерометров, по которым определяют температурные зависимости масштабных коэффициентов датчиков вращения лазерного гироскопа в отдельности для каждой моды «+» и «-» и для двух диапазонов угловых скоростей: диапазона «низких» (Н) угловых скоростей, меньших значения, соответствующего величине амплитуды частотной подставки, и диапазона «высоких» (В) угловых скоростей, превышающих такую величину, из соотношений
где α=x, y, z - оси чувствительности датчиков вращения трехосного лазерного гироскопа; Tqα - текущая температура, измеряемая в соответствующем датчике вращения лазерного гироскопа, Т0 - фиксированное значение температуры, равное 25°С, температурные зависимости смещений нулей для каждого датчика вращения трехосного лазерного гироскопа определяют отдельно для магнитной (М) составляющей, изменяющей знак при переходе с одной моды на другую, и немагнитной (НМ) составляющей, не зависящей от моды, из соотношений

температурные зависимости масштабных коэффициентов и смещений нулей маятниковых акселерометров из соотношений

где α=x, y, z - оси чувствительности МА; Таα - текущая температура, измеряемая в соответствующем маятниковом акселерометре, температурные зависимости недиагональных элементов матриц направляющих косинусов осей чувствительности трехосного лазерного гироскопа и маятниковых акселерометров в собственной системе координат инерциального измерительного блока
из соотношений

где Tq - температура лазерного гироскопа, осредненная по всем трем датчикам вращения,
а диагональные элементы матриц направляющих косинусов осей чувствительности трехосного лазерного гироскопа и маятниковых акселерометров в собственной системе координат инерциального измерительного блока определяют через недиагональные, исходя из условия нормировки по строкам

На чертежах представлены:
на фиг. 1 - стендовая система координат (исходное положение);
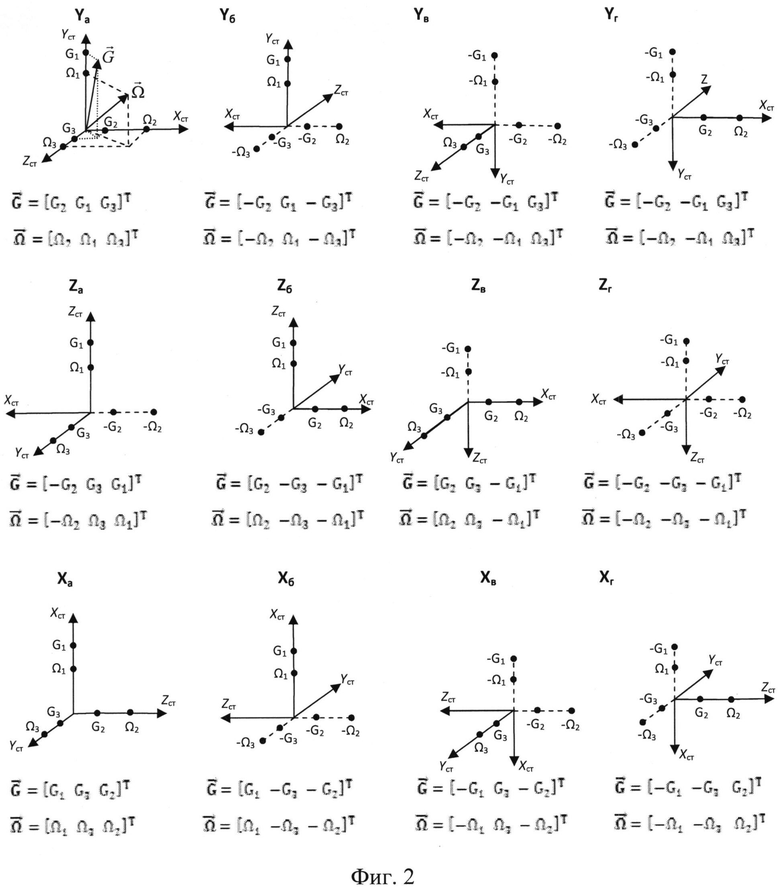
на фиг. 2 - положения стендовой системы координат инерциального измерительного блока при испытаниях.
Предложенный способ определения температурных зависимостей масштабных коэффициентов, смещений нуля и матриц ориентации осей чувствительности трехосного лазерного гироскопа и маятниковых акселерометров в составе инерциального измерительного блока при стендовых испытаниях реализуется следующим образом.
Целью настоящего изобретения является определение температурных зависимостей характеристик трехосного лазерного гироскопа (ЛГ) и маятниковых акселерометров (МА) в составе инерциального измерительного блока (ИИБ):
- масштабных коэффициентов датчиков вращения ЛГ и МА;
- смещений нуля датчиков вращения ЛГ и МА;
- матриц направляющих косинусов осей чувствительности ЛГ и МА в ортогональной системе координат - жестко связанной с корпусом ИИБ системой координат (СВСК).
Оси чувствительности трех датчиков вращения ЛГ и трех МА ориентированы в направлении соответствующих осей СВСК с некоторыми погрешностями, подлежащими определению.
Каждый из трех датчиков вращения в ЛГ и каждый из трех МА оснащен термодатчиком, измеряющим температуру. Трехосный ЛГ функционирует попеременно на двух ортогональных модах Μ=«+» и Μ=«-»; периодическое переключение с одной моды на другую и обратно уменьшает влияние магнитной составляющей смещения нуля (дрейфа нуля) на измерения угловой скорости вращения.
В технологическом режиме на каждом такте с ЛГ и МА снимаются следующие данные:
- количество импульсов для каждого из 3-х датчиков вращения ЛГ, пропорциональное проекции вектора угла поворота ЛГ за один такт передачи данных на каждую из 3-х осей чувствительности ЛГ, причем, если накопленный на оси за один такт угол не кратен целому числу импульсов, то искажения информации не происходит, так как «остаточный» угол переходит на следующий такт; кроме того в этом режиме через каждые ΝΜ тактов реализуется переход с одной моды на другую;
- средние за один такт значения напряжений на выходе трех МА, пропорциональные проекциям вектора кажущегося линейного ускорения на оси чувствительности МА.
- средние за один такт значения температуры на каждом из трех датчиков вращения ЛГ и трех МА;
Температурные зависимости масштабных коэффициентов датчиков вращения ЛГ близки к линейным и определяются в отдельности для каждой моды «+» и «-» и для двух диапазонов угловых скоростей: диапазона «низких» (Η) угловых скоростей, меньших значения, соответствующего величине амплитуды частотной подставки, и диапазона «высоких» (В) угловых скоростей, превышающих такую величину

где α= x, y, z - оси чувствительности датчиков вращения ЛГ; Tqα - текущая температура, измеряемая в соответствующем датчике вращения ЛГ, T0 - фиксированное значение температуры, равное 25°С.
Смещения (дрейф) нулей для каждого датчика вращения ЛГ содержат две составляющие: магнитную (М), изменяющую знак при переходе с одной моды на другую и немагнитную (НМ), не зависящую от моды. Температурные зависимости каждой из этих составляющих дрейфа определяются в виде полиномов второго порядка

Температурные зависимости масштабных коэффициентов и смещений нулей МА определяются в виде полиномов третьего порядка


где α= x, y, z - оси чувствительности МА; Таα - текущая температура, измеряемая в соответствующем МА.
Температурные зависимости недиагональных элементов матриц направляющих косинусов осей чувствительности ЛГ (q) и МА (а) в СВСК 
определяются в виде полиномов первого порядка


где Tq - температура ЛГ, осредненная по всем трем датчикам вращения.
Диагональные элементы матриц (6), (7) определяются через недиагональные, исходя из условия нормировки по строкам
Для достижения поставленной цели необходимо экспериментальным путем по данным, снимаемым с ИИБ, определить коэффициенты полиномов (1)-(5), (8), (9).
В качестве исходных данных имеется матрица направляющих косинусов осей чувствительности ЛГ в СВСК в нормальных климатических условиях (НКУ)
и значение температуры TqНКУ, среднее для всех трех датчиков вращения ЛГ, которому соответствует эта матрица.
Здесь α=x, y, z - оси чувствительности ЛГ; βсвск=Xсвск, Yсвск, Zсвск - оси СВСК.
Для реализации поставленной цели проводятся эксперименты с использованием высокоточного двухосного стенда, оснащенного камерой тепла и холода (КТХ). Нормаль к установочной платформе стенда совпадает с осью 1 стенда. Ось 2 стенда ортогональна оси 1 и расположена горизонтально. Стенд установлен таким образом, что при нулевых углах, заданных для обеих осей стенда, ось 1 направлена вверх, а ось 2 - на север. Погрешности установки стенда должны быть выявлены и учтены при определении искомых характеристик.
Введем в рассмотрение жестко связанную с установочной платформой стенда ортогональную стендовую систему координат (СТСК) ХстYстZст, оси которой в начальном положении стенда ориентированы следующим образом (фиг. 1):
- ось Хст совпадает с осью 2 стенда (ориентирована на север);
- ось Yст совпадает с осью 1 стенда (ориентирована вверх);
- ось Zст дополняет оси Хст и Yст до правой тройки (ориентирована на восток).
Из-за погрешностей установки стенда вектор местной вертикали 

где [·]Т - операция транспонирования вектора [·].
Вектор угловой скорости вращения Земли 

Проекции векторов 



где G и Ω - известные значения ускорения силы тяжести в точке проведения измерений и угловой скорости вращения Земли,
Значения 


ИИБ при помощи специальной оснастки размещается и жестко закрепляется на установочной платформе стенда таким образом, что оси СВСК ИИБ ориентированы вдоль соответствующих осей СТСК, хотя, строго говоря, не совпадают с ними.
Испытания проводятся при 12-ти различных положениях СТСК, изображенных на фиг. 2, причем положение Ya соответствует начальному положению, изображенному на фиг. 1. Под каждым из этих положений на фиг. 2 показаны значения проекций векторов

Испытания проводятся последовательно при нескольких заданных температурах в КТХ стенда

перекрывающих заданный диапазон температур.
Последовательность экспериментов.
Для каждой из температур в КТХ стенда (21) выполняется следующая последовательность действий.
1. Вывод КТХ на заданную температуру.
2. Выдержка ИИБ на этой температуре в течение заданного времени, зависящего от массы оснастки и ИИБ и гарантирующего достижение заданной температуры в КТХ всеми составными частями ИИБ.
3. Включение ИИБ, установка платформы стенда в исходное положение Ya и съем данных с датчиков вращения ЛГ в этом фиксированном положении в течение 1 часа с целью определения значений магнитного и немагнитного дрейфа.
4. Вращения установочной платформы стенда относительно каждой из осей СТСК на угол ±720° (на 2 полных оборота в одну и другую стороны) на 2-х скоростях («низкой» и «высокой») и 2-х модах ЛГ=«+» и «-»

Вращения по осям Хст, Zст выполняются относительно оси 2 стенда, а Ya, а по оси Yст - относительно оси 1. При вращениях относительно осей Хст, Yст начальным положением СТСК является положение Ya, а при вращениях относительно оси Zст - положение Ха.
Данные, снятые при таких вращениях, используются для определения значений масштабных коэффициентов датчиков вращения ЛГ, а также матриц направляющих косинусов осей чувствительности ЛГ в СТСК и затем в СВСК.
Для каждого набора из 6-ти вращений при фиксированных значениях параметров (22) определяется средняя температура по всем трем датчикам ЛГ.
5. Последовательная установка ИИБ в 12 фиксированных положений, представленных на рисунке 2. Данные, снятые с ЛГ и МА в каждом из этих положений, используются для определения проекций Ω1, Ω2, Ω3 вектора угловой скорости Земли 

Обработка результатов измерений.
Обработка данных, полученных при каждой фиксированной температуре Tктх j, j∈Jктх (21), заключается в следующем.
Данные измерений, полученные в п. 4 при каждой фиксированной температуре в КТХ стенда Tктх j, j∈Jктх (21), представляют собой совокупность сумм импульсов с каждого датчика вращения ЛГ α=х, у, z при вращениях в противоположных направлениях относительно трех осей СТСК при четырех комбинациях значений параметров (22)

а также средние температуры на каждом из этих датчиков при каждом из таких вращений:
где α=х, у, z - индекс оси чувствительности ЛГ,
βст= Хст, Yст, Zст - индекс оси СТСК, относительно которой выполнялось вращение; знак плюс или минус перед этим индексом обозначает направление вращения;

Для каждого набора из 6-ти вращений, произведенных при четырех комбинациях (22) значений параметров ω и М, вычисляются:
- масштабные коэффициенты ЛГ (в угл.с/импульс) в виде

где

- элементы матрицы

направляющих косинусов осей чувствительности ЛГ в СТСК в виде

- среднее значение температуры для каждого из датчиков вращения в каждом наборе из 6-ти вращений по формуле

которому соответствует вычисленное значение (26) масштабного коэффициента этого датчика;
- среднее значение температуры по всем трем датчикам вращения ЛГ

которому соответствуют вычисленные элементы матрицы ориентации осей чувствительности ЛГ в СТСК.
Для каждого датчика вращения α=х, у, z для каждой из четырех совокупностей рабочих точек

проводится линейная интерполяция с помощью метода наименьших квадратов. В результате этого определяются коэффициенты полиномов (1).
Для каждого недиагонального элемента матрицы направляющих косинусов осей чувствительности ЛГ в СТСК

по совокупности рабочих точек

j=1,2,… Nктх, ω=ωΗ, ωΒ; Μ=«+», «-»
проводится линейная интерполяция с помощью метода наименьших квадратов. В результате этого определяются коэффициенты полинома первого порядка

аппроксимирующего температурную зависимость каждого такого элемента.
Температурные зависимости диагональных элементов матрицы (33) находятся из условия нормировки по строке

Соотношения (35), (36) определяют температурную зависимость матрицы ориентации осей чувствительности ЛГ в СТСК

Используя термозависимость (37), эта матрица вычисляется при температуре Tq=ТqНКУ

Заданная матрица (12) и вычисленная матрица (38) описывают ориентацию осей чувствительности ЛГ в двух различных ортогональных системах координат СВСК и СТСК при одной и той же температуре ЛГ. Поэтому по ним можно вычислить не зависящую от температуры матрицу ориентации СТСК относительно СВСК

При любой произвольной температуре Tq матрица направляющих косинусов осей чувствительности ЛГ в СВСК представляет собой произведение матриц (37) и (39)

Для вычисления коэффициентов полиномов (8), аппроксимирующих термозависимость недиагональных элементов матрицы 

j=1,2,… Νктх, ω=ωΗ, ωВ; Μ=«+», «-»
и с помощью метода наименьших квадратов определяются значения коэффициентов этих полиномов.
Данные, полученные с акселерометров в п. 2.5 при фиксированной температуре Тктх j в КТХ стенда, представляют собой измеренные для каждого из 12-ти положений (рисунок 2)

средние значения снимаемых с акселерометров α=х, у, z напряжений и температур 

При каждой фиксированной температуре Тктхj в КТХ стенда определяются:
- масштабные коэффициенты МА (в м/с2/в) с точностью до неизвестного параметра 


где
и принята следующая индексация у переменных W: верхний индекс обозначает группу из 4-х положений прибора с указанием оси СТСК, ориентированной вертикально, первый символ в нижнем индексе указывает на заданную температуру в КТХ Tзад j, второй символ - на ось чувствительности ΜΑ, третий символ - на ось СВСК, по которой с помощью операций сложения и вычитания сформировано воздействие одной определенной проекции вектора 
- оценка величины направляющего косинуса bG1 вектора 

где  - определена в (44), а
- определена в (44), а  и
и  - вычисляются как
- вычисляются как

- элементы матрицы

направляющих косинусов осей чувствительности ЛГ в СТСК в виде

- среднее значение температуры на каждом из акселерометров α=х, у, z для всех 12-ти положений (42)

для последующей аппроксимации температурных зависимостей масштабных коэффициентов и смещений нулей МА;
- среднее значение температуры по всем трем акселерометрам

которому соответствуют вычисленные элементы матрицы ориентации осей чувствительности МА в СТСК.
Ориентация стенда относительно местной вертикали не зависит от температуры в КТХ стенда. Поэтому оценки направляющего косинуса hgt следует усреднить по всем температурам в КТХ стенда (21)

Значения масштабных коэффициентов МА при всех температурах (21) вычисляются по формулам (43)-(46), (51).
Для каждого ΜА α=х, у, z по совокупности рабочих точек (узлов интерполяции)

методом наименьших квадратов определяются искомые коэффициенты полинома (4).
Смещения нулей каждого МА α=х, у, z при каждой температуре в КТХ стенда вычисляются по формулам

Для каждого МА α=х, у, z по совокупности рабочих точек (узлов интерполяции)

методом наименьших квадратов определяются искомые коэффициенты полинома (5).
Данные, полученные с ЛГ в п. 5 в 12-ти положениях (фиг. 2) при фиксированной температуре Tктх j в КТХ стенда, используются для определения оценок проекций вектора угловой скорости вращения Земли 
На каждом полупериоде при неизменной моде ЛГ для каждого из датчиков вращения ЛГ α=х, у, z вычисляются соответственно средние значения количества импульсов за один такт передачи

При определении этих средних значений в вычислениях не участвуют данные для фиксированного числа Nискл первых тактов в каждом полупериоде для исключения влияния переходных процессов, вызванных переключением моды ЛГ.
По измерениям температуры на датчиках вращения при 12-ти положениях  , ψ∈Ψ, определяются значения температуры на каждом датчике вращения, усредненные по всем 12-ти положениям
, ψ∈Ψ, определяются значения температуры на каждом датчике вращения, усредненные по всем 12-ти положениям

Для каждого из положений (42) определяются измеренные на осях чувствительности ЛГ α=x, y, z значения угловой скорости

где  ,
,  - значения масштабного коэффициента для датчика вращения α=х, у, z, соответствующие моде «+» и моде «-», вычисленные по температуре
- значения масштабного коэффициента для датчика вращения α=х, у, z, соответствующие моде «+» и моде «-», вычисленные по температуре 
Δt - длительность такта съема информации с ЛГ.
Отдельно для каждой из 3-х групп положений с вертикальной ориентацией соответствующей оси СТСК (фиг. 2) определяются оценки проекций вектора угловой скорости Земли на оси СТСК Ω1, Ω2, Ω3 (фиг. 1):
- для группы положений с вертикальной ориентацией оси Хст в виде
где Δt - длительность такта съема информации с ЛГ;
 ,
,  ,
,  - значения диагональных членов матрицы ориентации осей чувствительности ЛГ в СТСК, вычисленные согласно термозависимости (37) по температуре, осредненной по всем трем датчикам вращения ЛГ:
- значения диагональных членов матрицы ориентации осей чувствительности ЛГ в СТСК, вычисленные согласно термозависимости (37) по температуре, осредненной по всем трем датчикам вращения ЛГ:

- для группы положений с вертикальной ориентацией оси Yст в виде

- для группы положений с вертикальной ориентацией оси Zст в виде:

Ориентация стенда относительно вектора угловой скорости Земли не зависит от температуры в КТХ стенда. Поэтому оценки проекций этого вектора на оси СТСК в ее исходном положении следует усреднить по всем группам положений при всех температурах (21)

где Ω - 15,04107 град/с - известное значение модуля вектора угловой скорости вращения Земли.
Данные, полученные с датчиков вращения ЛГ в п. 2.3, используются для определения коэффициентов термозависимостей магнитного и немагнитного дрейфов (2), (3). Реализации, снятые при фиксированных значениях температуры в КТХ стенда (21), состоят из последовательности интервалов времени с чередующимися значениями моды ЛГ, причем на первом таком интервале установлена мода «-». Для каждой m-й пары следующих друг за другом интервалов отдельно для моды «+» и моды «-» определяются средние значения количества импульсов, полученных с датчиков вращения α=х, у, z за один такт съема данных

и средние значения температуры на каждом из этих датчиков:

а также общее среднее значение температуры для всех трех датчиков и обеих мод ЛГ

где j=1,2,…, Νктх - индекс температуры в КТХ стенда;
m=1, 2,…, NM - индекс пары интервалов.
Для каждой m-й пары интервалов значения магнитной и немагнитной составляющих дрейфа нуля вычисляются по формулам

где  ,
,  - значения масштабного коэффициента для датчика вращения α=х, у, z, соответствующие моде «+» и моде «-», вычисленные по соответствующим значениям температуры
- значения масштабного коэффициента для датчика вращения α=х, у, z, соответствующие моде «+» и моде «-», вычисленные по соответствующим значениям температуры  ,
,  согласно первой и второй термозависимостям из (1) с коэффициентами, найденными выше;
согласно первой и второй термозависимостям из (1) с коэффициентами, найденными выше;
Ωjα - проекции вектора угловой скорости Земли на оси чувствительности ЛГ α=х, у, z в положении Ya, вычисляемые по формулам

где  ,
,  ,
,  - элементы матрицы ориентации этих осей чувствительности ЛГ в СТСК, вычисленные при температуре
- элементы матрицы ориентации этих осей чувствительности ЛГ в СТСК, вычисленные при температуре 
Ω1, Ω2, Ω3 - проекции вектора угловой скорости Земли, вычисленные выше.
По совокупности значений магнитного и немагнитного дрейфа и соответствующих им значений температур, полученным выше, для магнитного и немагнитного дрейфа каждого из датчиков вращения ЛГ α=х, у, z формируются совокупность рабочих точек:

j=1, 2,…,Nктх, m=1,2,…,ΝΜ,
по которым методом наименьших квадратов определяются искомые коэффициенты полиномов (2), (3).
Таким образом, благодаря введению дополнительных операций способа достигается требуемый технический результат, заключающийся в расширении области применения способа, поскольку обеспечивается определение температурных зависимостей характеристик трехосного лазерного гироскопа и маятниковых акселерометров в составе инерциального измерительного блока.
Изобретение относится к области приборостроения и может быть использовано для определения температурных зависимостей характеристик трехосного лазерного гироскопа (ЛГ) и маятниковых акселерометров (МА) в составе инерциальных измерительных блоков (ИИБ). Технический результат - расширение функциональных возможностей. Для этого на стенде ИИБ с трехосным ЛГ и тремя МА, оснащенными датчиками вращения, на каждом такте измерений определяют количество импульсов для каждого из трех датчиков вращения ЛГ, пропорциональное проекции вектора угла поворота ЛГ за один такт измерений на каждую из трех осей чувствительности ЛГ, определяют средние за один такт измерений значения напряжений на выходе трех МА, пропорциональные проекциям вектора кажущегося линейного ускорения на оси чувствительности МА, и средние за один такт измерений значения температуры на каждом из трех датчиков вращения трехосного ЛГ и трех МА, по которым определяют температурные зависимости всех масштабных коэффициентов ЛГ и МА. 2 ил.
Способ определения температурных зависимостей масштабных коэффициентов, смещений нуля и матриц ориентации осей чувствительности лазерных гироскопов и маятниковых акселерометров в составе инерциального измерительного блока при стендовых испытаниях, основанный на проведении измерений параметров маятниковых акселерометров, а также обработке результатов измерений, отличающийся тем, что устанавливают на стенде инерциальный измерительный блок с трехосным лазерным гироскопом и тремя маятниковыми акселерометрами, оснащенными датчиками вращения, которые ориентируют в направлении соответствующих осей собственной системы координат инерциального измерительного блока, на каждом такте измерений определяют количество импульсов для каждого из трех датчиков вращения лазерного гироскопа, пропорциональное проекции вектора угла поворота лазерного гироскопа за один такт измерений на каждую из трех осей чувствительности лазерного гироскопа, определяют средние за один такт измерений значения напряжений на выходе трех маятниковых акселерометров, пропорциональные проекциям вектора кажущегося линейного ускорения на оси чувствительности маятниковых акселерометров, и средние за один такт измерений значения температуры на каждом из трех датчиков вращения трехосного лазерного гироскопа и трех маятниковых акселерометров, по которым определяют температурные зависимости масштабных коэффициентов датчиков вращения лазерного гироскопа в отдельности для каждой моды «+» и «-» и для двух диапазонов угловых скоростей диапазона «низких» (Н) угловых скоростей, меньших значения, соответствующего величине амплитуды частотной подставки, и диапазона «высоких» (В) угловых скоростей, превышающих такую величину, из соотношений

где α=x, y, z - оси чувствительности датчиков вращения лазерного гироскопа; Tqα - текущая температура, измеряемая в соответствующем датчике вращения лазерного гироскопа, Т0 - фиксированное значение температуры, равное 25°С,
температурные зависимости смещения нулей для каждого датчика вращения лазерного гироскопа определяют из соотношений, содержащих магнитную (М), изменяющую знак при переходе с одной моды на другую и немагнитную (НМ), не зависящую от моды, составляющие

температурные зависимости масштабных коэффициентов и смещений нулей маятниковых акселерометров из соотношений

где α=x, у, z - оси чувствительности ΜΑ; Taα - текущая температура, измеряемая в соответствующем маятниковом акселерометре,
температурные зависимости недиагональных элементов матриц направляющих косинусов осей чувствительности лазерного гироскопа и маятниковых акселерометров

из соотношений

где Tq - температура лазерного гироскопа, осредненная по всем трем датчикам вращения,
а диагональные элементы матриц направляющих косинусов осей чувствительности лазерного гироскопа и маятниковых акселерометров определяют через недиагональные, исходя из условия нормировки по строкам

| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОДЕЛИ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЙ АКСЕЛЕРОМЕТРОВ ВЕДОМОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПО ИЗМЕРЕНИЯМ ЭТАЛОННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2505785C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ КАЛИБРОВКИ ТРЕХОСНЫХ ЛАЗЕРНЫХ ГИРОСКОПОВ С ОДНИМ ОБЩИМ ВИБРАТОРОМ | 2011 |
|
RU2488776C1 |
| ЛЕБЕДЕВ А.А., БОБРОННИКОВ В.Т., КРАСИЛЬЩИКОВ М.Н., МАЛЫШЕВ В.В | |||
| Статистическая динамика и оптимизация управления летательных аппаратов | |||
| - М.: Машиностроение, 1985, с.85-87 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ МОДЕЛИ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 1992 |
|
RU2049311C1 |
| Анемометр | 1940 |
|
SU66563A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ДВУХЭТАПНЫМ ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 2002 |
|
RU2231819C2 |

