Изобретение относится к области навигации летательных аппаратов (ЛА) с использованием комплексного способа навигации, функционально объединяющего инерциальный способ навигации, спутниковый способ навигации и воздушно-скоростной способ навигации, а также относится к области навигационных приборов для контроля и управления летательными аппаратами. За счет использования малогабаритных воздушно-скоростных систем навигации, из-за их высокой помехозащищенности и автономности, существенно повышается эффективность воздушной навигации. Это стало возможно с появлением малогабаритных процессоров, микроконтроллеров.
Известен комплексный способ навигации летательных аппаратов, описанный в патенте на изобретение РФ №2510518, МПК G01C 21/00, G01S 19/38, опубликованном 27.03.2014, принятый нами за прототип.
Известный Комплексный способ навигации ЛА включает в себя спутниковый и радиотехнический дальномерный способы навигации на основе наземных радиомаяков (НРМ), при этом прием сигналов спутников выполняется как на борту ЛА, так и на ряде наземных НРМ, в том числе на НРМ у взлетно-посадочной полосы (ВПП). На ЛА вычисляются навигационные параметры, производится комплексная обработка данных и непрерывная сравнительная оценка погрешностей.
Недостатками известного способа являются: низкая помехоустойчивость; требуется большое количество радиомаяков с точной геодезической привязкой на местности. Кроме того, в известном способе недостаточно уделено внимание вопросам достоверности информации и надежности навигации. Например, при отказе навигационного комплекса или источников питания невозможно продолжить полет до посадки на аэродром.
Целью заявляемого изобретения является расширение функциональных возможностей, повышение надежности работы и эффективности навигации, а также повышение точности определения навигационных параметров в случае пропадания сигналов от приемника спутниковой навигационной системы (СНС).
Поставленная цель достигается за счет того, что в комплексном способе навигации летательных аппаратов, функционально объединяющем инерциальный способ навигации, спутниковый способ навигации и воздушно-скоростной способ навигации с использованием магнитометрических датчиков, дополнительно осуществляют начальную выставку по курсу в процессе руления и разбега до момента отрыва летательного аппарата (ЛА) от ВПП, определение и списание девиации магнитометрических датчиков после набора высоты путем совершения полета по кругу, осуществляют процесс навигации в трех режимах: основной режим навигации, где инерциальную систему и систему воздушных сигналов (СВС) корректируют по сигналам спутниковой системы навигации (СНС), осуществляют двухуровневый контроль достоверности сигналов от приемника СНС и определяют погрешности измерения воздушной скорости и скорости ветра, используя сигналы СНС, альтернативный режим навигации, где инерциальную систему корректируют по сигналам СВС, которую включают при отсутствии сигналов от приемников СНС или достоверности сигналов от приемника СНС, и резервный режим навигации, который включают в случае отказа системы СНС и СВС, где используют адаптированную к возмущениям резервную систему определения углов пространственной ориентации (АРКВ), корректируемую по сигналам акселерометров и магнитометрических датчиков со списанной девиацией в полете, осуществляют оптимизацию коэффициентов адаптивной коррекции углов по сигналам акселерометров, в зависимости от режима полета ЛА.
Суть способа организации малогабаритной отказоустойчивой навигационной системы излагается ниже.
На этапе руления и разбега осуществляют определение путевого угла ЛА по сигналам СНС. Измеренный путевой угол до момента отрыва ЛА от ВПП является истинным курсом ЛА, по которому выставляют начальный курс ЛА:
 ;
;
где WN и WE земные скорости ЛА в направлении северного меридиана и восточной параллели, получаемые от СНС.
Момент отрыва ЛА от ВПП фиксируется концевым выключателем обжатия стойки шасси, который дает команду на фиксирование значения курса ЛА.
После набора высоты совершают полный круг над аэродромом или в заданной зоне, где отсутствуют магнитные аномалии, с постоянным углом крена, в процессе которого запоминаются значения измеренного магнитного курса при помощи магнитометрического датчика с учетом выставленного истинного курса  . Используя полученный массив и выставленный истинный курс, определяют постоянное смещение оценки магнитного курса.
. Используя полученный массив и выставленный истинный курс, определяют постоянное смещение оценки магнитного курса.
Используя упрощенную модель, которая позволяет учесть влияние второй по значимости четвертной девиации на ошибку определения магнитного курса и приведенные ниже алгоритмы, определяют коэффициенты магнитной девиации магнитометрического датчика.
Как показывают расчеты, модель содержит шесть параметров Пуассона, которые устойчиво определяются по ограниченному объему полетных данных. Допущение о равенстве b и d является пренебрежением влияния индуктивного магнитного поля ЛА на постоянное смещение оценки магнитного курса, которое определяют в начале.
Упрощенные уравнения Пуассона:

где
 ,
,  ,
,  ,
,  ,
,  ,
,
Коэффициенты p, q, r учитывают влияние магнетизма, твердого в магнитном отношении, железа. Коэффициенты a, b, d, e учитывают влияние магнитного поля мягкого, в магнитном отношении, железа ЛА.
С учетом направления связанных осей ЛА матрица H и вектор P принимают вид
 ,
, 
Далее определяют: Оценка модуля магнитного поля земли (МПЗ)  , усредненная на всем отрезке наблюдения из N отсчетов.
, усредненная на всем отрезке наблюдения из N отсчетов.
 ,
,  - полная совокупность измерений магнитометра.
- полная совокупность измерений магнитометра.
 ,
,  - совокупность оценок измерений магнитометра с учетом компенсации девиации.
- совокупность оценок измерений магнитометра с учетом компенсации девиации.
 ,
,  - совокупность оценок модуля МПЗ с учетом компенсации девиации.
- совокупность оценок модуля МПЗ с учетом компенсации девиации.
 ,
,  - оценка модуля МПЗ, усредненная по всему отрезку наблюдения, скалярная величина.
- оценка модуля МПЗ, усредненная по всему отрезку наблюдения, скалярная величина.
Оценка средних значений модуля МПЗ  ,
,  на J частных интервалах.
на J частных интервалах.
 ,
,  ,
,  - совокупность оценок модуля МПЗ, усредненных на частных интервалах наблюдения.
- совокупность оценок модуля МПЗ, усредненных на частных интервалах наблюдения.
Запоминание вектора частных оценок модуля МПЗ.
 .
.
Вектор  имеет размерность J.
имеет размерность J.
Формирование вектора B разностей между оценкой модуля МПЗ, усредненной по всему отрезку наблюдения и оценками, усредненными на частных интервалах.
 .
.
 .
.
Вычисление функций чувствительности измерений модуля МПЗ к вариациям искомых коэффициентов.
Вычисление приращений оценок коэффициентов осуществляется путем формирования системы линейных алгебраических уравнений.
Aα=B,
где A - матрица функций чувствительности размерностью (J,6)
 ,
,
где B - вектор, размерностью J,  ,
,
где α - вектор приращений.
Решение определяется решением следующего выражения:
 .
.
При правильном решении приращения Δp Δr Δq Δa Δe Δb по мере выполнения итераций стремятся к нулю. Итерационный процесс полагаем успешным, если на последней итерации выполняется условие:

Текущее значение магнитного курса изделия вычисляется с помощью соотношений:
 ,
,
 .
.
Более подробно способом списания девиации в полете можно ознакомиться в работе [1].
В основном режиме для коррекции углов пространственной ориентации, значения земных скоростей и координат местоположения ЛА используют сигналы СНС. При этом используют разомкнутую схему счисления и фильтрации Калмана:
Оцениваемыми являются 21 параметр, которые составляют вектор X.

Где ΔB, ΔL, Δh - ошибки определения геодезической широты, долготы и высоты ЛА,
ΔVN, ΔVE, ΔVU - ошибки определения проекций земных скоростей ЛА,
Ψ1, Ψ2, Ψ2 - ошибки определения углов вычислительной (платформенной) системы координат (СК) относительно навигационной СК,
Δax, Δay, Δaz, δax, δay, δaz - постоянные и случайные составляющие погрешностей датчиков линейных ускорений,
Δωx, Δωy, Δωz, δωx, δωy, δωz - постоянные и случайные составляющие погрешностей датчиков угловых скоростей.
Выражения, описывающие Фильтр Калмана приведены ниже:
1. 
2. 
3. 
4. 
5. 
6. 
7. Вектор наблюдений:
8. 
9. 
10. Коррекция

В процессе работы приемника СНС осуществляют непрерывный двухуровневый контроль достоверности сигналов от приемников СНС. На первом уровне ("грубый контроль") определяют широту, долготу и высоту с заданной точностью. При этом пороги по координатам определяют, исходя из области, ограниченной максимально возможной дальностью и высотой полета. Пороги по скорости контролируют по модулю скорости, которая должна находиться в приделах эксплуатационного диапазона.
На втором уровне производят контроль на скользящем интервале наблюдений, где осуществляют контроль измерений скорости, используя сдвигающий буфер BV типа «бегущей строки», в котором хранятся последние N измерений модуля скорости. При поступлении нового измерения происходит сдвиг содержимого и вычисление вариации модуля скорости, при этом, в случае превышения вариацией модуля скорости заданного порога δ|V|>Por(V), формируется признак неисправности Pr=1. Контроль измерения координат осуществляют путем определения приращения пути, используя сдвигающий буфер BD, типа «бегущий строки», в котором хранятся последние N измерений приращения пути. При поступлении нового измерения происходит сдвиг содержимого и вычисление вариации приращения пути. В случае превышения вариацией приращения пути заданного порога δD>Por(D), формируется признак неисправности Рr=1. Контроль выдачи одних и тех же их значений параметров от СНС осуществляют до "n" совпадений, при достижении которого формируется признак неисправности Pr=1.
Полный алгоритм определения достоверности сигналов от приемника СНС приведен в работе [2].
Одновременно определяются проекции скорости ветра, воздушной скорости, счисление текущих координат по сигналам воздушной скорости и барометрическая высота и их ошибки по сигналам от СВС. Для определения скорости ветра и ошибок определения воздушной скорости измеряют земную скорость при помощи СНС, определяют проекции скорости ветра на нормальную земную систему координат путем параметрической идентификации и, используя значения углов пространственной ориентации летательного аппарата, переводят их в систему координат, связанную с летательным аппаратом, на основании полученных данных определяют значение воздушной скорости, сравнивают его со значением, полученным при непосредственном измерении воздушной скорости, используя полученный результат сравнения, формируют функционал и, минимизируя его итеративным способом, определяют и компенсируют погрешность измерения воздушной скорости. Алгоритмы оценивания погрешностей воздушной скорости и определения ветра приведены в работе [5].
Альтернативный режим включается при пропадании и в случае отсутствия достоверности сигналов от приемника СНС. В этом случае в уравнениях невязки фильтра Калмана (ФК) значения скоростей и координат от СНС замещаются скорректированными на текущий момент значениями воздушной скорости и высоты. Для вычисления земной скорости используются последние вычисленные значения проекций скорости ветра на момент отключения СНС.

Расчет скорости ветра:






Резервный режим работает в горячем резерве. В процессе нормальной работы осуществляется проверка достоверности значений углов пространственной ориентации по сигналам АРКВ, который имеет свой аварийный источник питания. Курс определяется по сигналам от магнитного датчика с учетом коэффициентов магнитной девиации. Высота определяется по датчику барометрической высоты АРКВ.
В работе АРКВ используют две модели ориентации. Модель 1 предназначена для учета изменения ориентации аппарата на шагах дискретизации измерений гироскопов. Она является динамической, детерминированной и выражена в параметрах Родрига-Гамильтона
Здесь qi - кватернион ориентации ЛА; qωi - кватернион угловых скоростей; i - номер дискретного момента времени; Δt - шаг дискретизации измерений; q0 - кватернион ориентации для начального момента времени.
Кватернион q определяет ориентацию связанной системы координат аппарата относительно инерциальной системы координат, роль которой играет нормальная земная система координат. С точки зрения теории бесплатформенных инерциальных систем соотношения (4) являются одношаговым алгоритмом ориентации.
Модель 2 предназначена для коррекции модели 1. Вектор состояния модели 2 учитывает три компонента - крен, тангаж и скорость ЛА относительно земли. Ее вектор состояния подлежит оцениванию по текущим значениям сигналов от акселерометров. Модель 2 является стохастической и статической, поскольку ее состояние учитывается для текущего момента дискретного времени ti. Соотношения для модели 2 имеют вид

Здесь xi - вектор состояния;  - его априорное нормальное распределение; V - земная скорость; wi - вектор возмущений; xiq - вспомогательный вектор, рассчитываемый по кватерниону ориентации модели 1 с помощью матрицы A поворота связанной системы координат относительно инерциальной
- его априорное нормальное распределение; V - земная скорость; wi - вектор возмущений; xiq - вспомогательный вектор, рассчитываемый по кватерниону ориентации модели 1 с помощью матрицы A поворота связанной системы координат относительно инерциальной

 .
.
Обозначим  - априорное нормальное распределение вектора состояния модели 2 для момента времени ti;
- априорное нормальное распределение вектора состояния модели 2 для момента времени ti;  - апостериорное распределение, подлежащее оцениванию;
- апостериорное распределение, подлежащее оцениванию;  - априорное распределение для следующего момента времени ti+1. Тогда коррекция углов, осуществляемая на одном интервале дискретизации измерений Δt, представляется в виде последовательности следующих шагов.
- априорное распределение для следующего момента времени ti+1. Тогда коррекция углов, осуществляемая на одном интервале дискретизации измерений Δt, представляется в виде последовательности следующих шагов.
Шаг 1. Определение статистик апостериорной плотности  вектора состояния модели 2 с учетом
вектора состояния модели 2 с учетом  и текущих измерений гироскопов и акселерометров. Определение статистик апостериорной плотности
и текущих измерений гироскопов и акселерометров. Определение статистик апостериорной плотности  имеет вид известных соотношений байесовского оценивания вектора состояния по вектору его дискретных измерений.
имеет вид известных соотношений байесовского оценивания вектора состояния по вектору его дискретных измерений.
 ,
,
 ,
,
 ,
,
 .
.
Здесь  - оценка вектора наблюдений, которая имеет вид
- оценка вектора наблюдений, которая имеет вид
 .
.
Шаг 2. Расчет оценки кватерниона ориентации  .
.
Шаг 3. Вычисление априорного кватерниона ориентации  для следующего момента дискретного времени.
для следующего момента дискретного времени.
Шаг 4. Вычисление статистик априорной плотности  . Вычисление статистик априорной плотности
. Вычисление статистик априорной плотности  включает в себя расчет априорного математического ожидания и ковариационной матрицы. Априорное математическое ожидание компоненты скорости определяется с учетом допущения о постоянстве скорости и принимается равным ее оценке:
включает в себя расчет априорного математического ожидания и ковариационной матрицы. Априорное математическое ожидание компоненты скорости определяется с учетом допущения о постоянстве скорости и принимается равным ее оценке:  . Априорные математические ожидания тангажа
. Априорные математические ожидания тангажа  и крена
и крена  вычисляются по кватерниону
вычисляются по кватерниону  и соотношениям (5). Априорная ковариационная матрица приближенно принимается равной апостериорной ковариационной матрице:
и соотношениям (5). Априорная ковариационная матрица приближенно принимается равной апостериорной ковариационной матрице:  . Применение более сложных соотношений для ее расчета представляется неоправданным в силу приближенности модели 2.
. Применение более сложных соотношений для ее расчета представляется неоправданным в силу приближенности модели 2.
Указанные вычисления выполняются на каждом шаге Δt по мере поступления новых измерений гироскопов и акселерометров. В резервном режиме определяются курс, крен, тангаж и барометрическая высота ЛА.
Полные описание работы АРКВ приведены в работах [3, 4].
В предлагаемом способе осуществляют оптимизацию адаптации коэффициентов фильтра АРКВ в зависимости от турбулентности. Полные выражения для перегрузок, зависящих от параметров полета ЛА определяются следующим выражением
Степень влияния слагаемых в правых частях (6) зависит от режима полета.
На режиме прямолинейного горизонтального полета с постоянной скоростью имеет место  ,
,  ,
,  . Данные соотношения используются в простейших вариантах коррекции, когда ускорения, создаваемые ЛА, значительно меньше гравитационных.
. Данные соотношения используются в простейших вариантах коррекции, когда ускорения, создаваемые ЛА, значительно меньше гравитационных.
Слагаемые  ,
,  ,
,  обусловлены появлением Кориолисовых сил и имеют значимость при разворотах ЛА.
обусловлены появлением Кориолисовых сил и имеют значимость при разворотах ЛА.
Слагаемые  ,
,  ,
,  имеют значимость при появлении линейных ускорений по связанным осям ЛА.
имеют значимость при появлении линейных ускорений по связанным осям ЛА.
В рамках вектора состояния модели 2 учитывают наиболее значимые члены в (6). При относительно небольших углах атаки и скольжения скорость направлена в основном по строительной оси.
 ,
, 
Тогда (6) представляется в упрощенном виде

Приближенность (7) и допущения снижают точность учета составляющих кажущегося ускорения (6). Однако строгое выполнение (7) не требуется, в чем и состоит преимущество исходной идеи. Суть в том, что всякое отклонение модуля перегрузки от единицы и всякая неточность (7) учитывается снижением доверия к наблюдениям перегрузок путем увеличения дисперсий в ковариационной матрице Ri. При этом снижается интенсивность коррекции, следовательно, снижаются ее ошибки.
На режимах разгона и торможения значительный вклад в изменение кажущегося ускорения вносит производная скорости.
Учитывая то, что изменение скорости ЛА относится к длиннопериодическому движению, производная скорости выделяется из оценки скорости с помощью сглаживающего фильтра нижних частот

 ,
,  ,
,  ,
,
где T - постоянная времени фильтра нижних частот.
Из рассмотрения Якобиана (7) следует, что оценивание скорости ЛА происходит при выполнении разворотов, когда присутствуют одна или обе угловые скорости ωz, ωy. При этом слагаемые  ,
,  в соотношениях для ny, nz (7) обеспечивают оценивание крена. Из первого уравнения в (7) следует, что слагаемое
в соотношениях для ny, nz (7) обеспечивают оценивание крена. Из первого уравнения в (7) следует, что слагаемое  в выражении для
в выражении для  влияет на оценивание тангажа.
влияет на оценивание тангажа.
На участках полета при взлете и посадке, когда скорость изменяется наиболее интенсивно, а ЛА не выполняет разворотов, скорость не оценивается, но при этом учитывают  для повышения точности оценивания тангажа. С этой целью измеряют истинную воздушную скорость VTA, с помощью СВС. Современные СВС обладают достаточно высокой точностью. Выделение производной
для повышения точности оценивания тангажа. С этой целью измеряют истинную воздушную скорость VTA, с помощью СВС. Современные СВС обладают достаточно высокой точностью. Выделение производной  выполняют аналогично с помощью фильтра нижних частот:
выполняют аналогично с помощью фильтра нижних частот:

Заметим, что при этом постоянные рассогласования между земной и истинной воздушной скоростями не вносят ошибок в определение производной. Динамические ошибки измерения VTA на малых высотах взлета и посадки незначительны. Шумовые погрешности СВС сглаживаются фильтром. Поэтому с достаточной точностью правомерно положить  .
.
Дополнительную оптимизацию коэффициентов фильтра АРКВ выполняют с учетом уровня погрешностей датчиков. Путем анализа ошибок инерциальных датчиков с помощью спектральной плотности мощности и дисперсии Алана выделяют шумы квантования, случайное блуждание (дрейф), нестабильность смещения нуля (фликкер шум), случайное блуждание (дрейф) скорости, мультипликативную систематическую погрешность и синусоидальный шум.
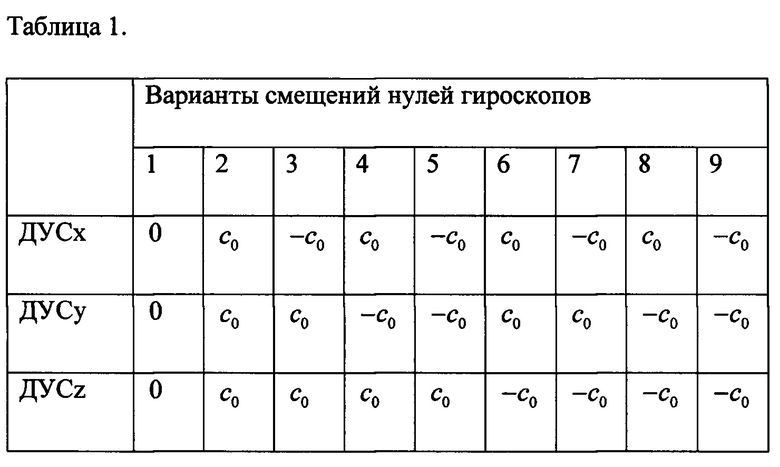
С учетом того, что основной вклад в ошибки ориентации вносят смещения нулей гироскопов, настройку коэффициентов фильтра Калмана выполняют на множестве обучающих последовательностей, формируемых для набора сочетаний знаков смещений.
Коэффициенты фильтра оптимизируют следующим образом. Для каждого полета формируют девять обучающих последовательностей. Варианты знаков смещений нулей гироскопов представлены в таблице 1, где c0 - абсолютная величина смещения. Величина c0 задается с учетом класса точности располагаемых гироскопов.
Всего в алгоритме присутствует шесть коэффициентов, подлежащих настройке: q1, q2, q3 - диагональные элементы ковариационной матрицы возмущений Q, и а=d1,  ,
,  - коэффициенты нелинейной функции
- коэффициенты нелинейной функции  , определяющей диагональные элементы ковариационной матрицы ошибок наблюдения R.
, определяющей диагональные элементы ковариационной матрицы ошибок наблюдения R.
Критерием качества J1 назначают взвешенную среднеквадратическую ошибку ориентации по крену и тангажу, усредненную по времени и по множеству всех девяти обучающих последовательностей.

где  - среднеквадратическая ошибка оценивания тангажа;
- среднеквадратическая ошибка оценивания тангажа;  - среднеквадратическая ошибка оценивания крена; αϑ=0.5 и αγ=0.5 - весовые коэффициенты;
- среднеквадратическая ошибка оценивания крена; αϑ=0.5 и αγ=0.5 - весовые коэффициенты;  - множество из шести искомых коэффициентов алгоритма.
- множество из шести искомых коэффициентов алгоритма.
Идентификацию турбулентности в смысле выявления ее наличия выполняют по величине среднеквадратичного отклонения  на скользящем интервале небольшой длины порядка 1-2 секунд. При превышении некоторого заданного порога
на скользящем интервале небольшой длины порядка 1-2 секунд. При превышении некоторого заданного порога  принимают решение о наличии турбулентности.
принимают решение о наличии турбулентности.
Оптимизацию коэффициентов осуществляют в три этапа. 1. Численная минимизация критерия качества minJ1 и определение коэффициентов  для полетов в спокойной атмосфере,
для полетов в спокойной атмосфере,  .
.
2. Численная минимизация критерия качества minJ1 и определение коэффициентов  для полетов в условиях турбулентности,
для полетов в условиях турбулентности,  .
.
3. Определение процедуры вычисления дисперсий  , удовлетворяющих с достаточной точностью полетам как в спокойной атмосфере, так и в турбулентности.
, удовлетворяющих с достаточной точностью полетам как в спокойной атмосфере, так и в турбулентности.
Наиболее просто данная процедура реализуется с помощью линейной интерполяции коэффициентов фильтра по результатам этапов 1, 2, и текущим значениям  ,
,  .
.
Заявляемый способ организации малогабаритной отказоустойчивой навигационной системы может быть использован как на высокоманевренных ЛА, так и на маломаневренных ЛА. Техническим результатом является: сокращение времени начальной выставки за счет определения курса ЛА в процессе руления и разбега. Повышение надежности осуществляется путем использования СВС в случае пропадания сигналов от СНС и использования резервной навигационной системы, а также проверкой достоверности сигналов от приемника СНС и проверкой значений углов ориентации путем сравнения сигналов от инерциальной системы со значениями углов, по сигналам от резервной системы. Повышение точности определения истинного курса путем списания девиации в полете постоянной адаптивной коррекцией углов крена и тангажа по сигналам акселерометров, а также оптимизацией коэффициентов фильтрации в зависимости от турбулентности. Заметим, что списание девиации может быть осуществлено периодически, в случае отсутствия замены бортового и подвесного оборудования ЛА.
Исследования методом математического моделирования и путем проведения натурного эксперимента на ЛА показали работоспособность и высокую точность предложенного способа.
Литература
1. Патент №2550774, Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления, МПК G01C 21/08. Бюллетень №13, 2015 г. Авторы Заец В.Ф., Кулабухов B.C., Качанов Б.О., Туктарев Н.А., Гришин Д.В.
2. Патент №2585051, Способ контроля данных от спутниковых навигационных систем и устройство для его осуществления, МПК G01S 19/08. Бюллетень №15, 2015 г. Авторы Заец В.Ф., Кулабухов B.C., Качанов Б.О., Туктарев Н.А.
3. Патент №2564380, Способ коррекции бесплатформенной инерциальной навигационной системы, МПК G01C 21/06. Бюллетень №27, 2015 г. вторы Заец В.Ф., Кулабухов B.C., Качанов Б.О., Туктарев Н.А., Гришин Д.В.
4. Патент №2564379, Бесплатформенная инерциальная курсовертикаль, МПК G01C 21/16. Бюллетень №27, 2015 г. Авторы Заец В.Ф., Кулабухов B.C., Качанов Б.О., Туктарев Н.А.
5. Патент №2579550, Способ определения погрешности измерения воздушной скорости и устройство для его осуществления, МПК G01P 21/00. Бюллетень №10, 2016 г. Авторы Заец В.Ф., Корсун О.Н., Кулабухов B.C., Туктарев Н.А., Лысюк О.П.
| название | год | авторы | номер документа |
|---|---|---|---|
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
| Способ определения углов пространственной ориентации | 2016 |
|
RU2713078C1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| Способ коррекции углов ориентации БИНС | 2022 |
|
RU2796328C1 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| Адаптивный способ коррекции углов ориентации БИНС | 2020 |
|
RU2754396C1 |
| Способ коррекции углов ориентации ЛА по сигналам от одноантенной СНС | 2022 |
|
RU2790081C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |
| ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ СИСТЕМА НАВИГАЦИИ СРЕДНЕЙ ТОЧНОСТИ ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2539140C1 |
| Способ коррекции углов ориентации БИНС на скользящем интервале | 2022 |
|
RU2790076C1 |
Изобретение относится к области навигации летательных аппаратов (ЛА) с использованием комплексного способа навигации, а также относится к области навигационных приборов для контроля и управления летательными аппаратами. Комплексный способ навигации летательных аппаратов, функционально объединяющий инерциальный способ навигации, спутниковый способ навигации и воздушно-скоростной способ навигации с использованием магнитометрических датчиков, при этом дополнительно осуществляют начальную выставку по курсу в процессе руления и разбега до момента отрыва летательного аппарата (ЛА) от ВПП, определение и списание девиации магнитометрических датчиков после набора высоты путем совершения полета по кругу, осуществляют процесс навигации в трех режимах: основной режим навигации, где инерциальную систему и систему воздушных сигналов (СВС) корректируют по сигналам спутниковой системы навигации (СНС), осуществляют двухуровневый контроль достоверности сигналов от приемника СНС и определяют погрешности измерения воздушной скорости и скорости ветра, используя сигналы СНС, альтернативный режим навигации, где инерциальную систему корректируют по сигналам СВС, которого включают при отсутствии сигналов от приемников СНС или достоверности сигналов от приемника СНС и резервный режим навигации, которого включают в случае отказа системы СНС и СВС, где используют адаптированную к возмущениям резервную систему определения углов пространственной ориентации, корректируемую по сигналам акселерометров и магнитометрических датчиков со списанной девиацией в полете, осуществляют оптимизацию коэффициентов адаптивной коррекции углов по сигналам акселерометров, в зависимости от режима полета ЛА. Техническим результатом является расширение функциональных возможностей, повышение надежности работы и эффективности навигации, а также повышение точности определения навигационных параметров в случае пропадания сигналов от приемника спутниковой навигационной системы (СНС).
Комплексный способ навигации летательных аппаратов, функционально объединяющий инерциальный способ навигации, спутниковый способ навигации и воздушно-скоростной способ навигации с использованием магнитометрических датчиков, отличающийся тем, что дополнительно осуществляют начальную выставку по курсу в процессе руления и разбега до момента отрыва летательного аппарата (ЛА) от ВПП, определение и списание девиации магнитометрических датчиков после набора высоты путем совершения полета по кругу, осуществляют процесс навигации в трех режимах: основной режим навигации, где инерциальную систему и систему воздушных сигналов (СВС) корректируют по сигналам спутниковой системы навигации (СНС), осуществляют двухуровневый контроль достоверности сигналов от приемника СНС и определяют погрешности измерения воздушной скорости и скорости ветра, используя сигналы СНС, альтернативный режим навигации, где инерциальную систему корректируют по сигналам СВС, которую включают при отсутствии сигналов от приемников СНС или достоверности сигналов от приемника СНС, и резервный режим навигации, который включают в случае отказа системы СНС и СВС, где используют адаптированную к возмущениям резервную систему определения углов пространственной ориентации, корректируемую по сигналам акселерометров и магнитометрических датчиков со списанной девиацией в полете, осуществляют оптимизацию коэффициентов адаптивной коррекции углов по сигналам акселерометров, в зависимости от режима полета ЛА.
| СПОСОБ КОРРЕКЦИИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2564380C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ ДЕВИАЦИИ МАГНИТОМЕТРИЧЕСКИХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550774C1 |
| АЭРОНАВИГАЦИОННОЕ УСТРОЙСТВО С ИНЕРЦИОННЫМИ ДАТЧИКАМИ И РАДИОНАВИГАЦИОННЫМИ ПРИЕМНИКАМИ И СПОСОБ АЭРОНАВИГАЦИИ, ИСПОЛЬЗУЮЩИЙ ТАКИЕ ЭЛЕМЕНТЫ | 2007 |
|
RU2434248C2 |
| US 8548649 B2 01.10.2013. | |||

