Изобретение относится к приборостроению, в частности к инерциальным навигационным системам, и может быть использовано для измерения ошибок начальной выставки инерциальной навигационной системы (ИНС) без привязки к внешним ориентирам.
Одним из режимов работы инерциальной навигационной системы (ИНС), состоящей из трех гироскопов и трех акселерометров, является начальная выставка, когда по показаниям гироскопов и акселерометров определяется азимут одной из ее осей и углы наклона осей системы к плоскости местного горизонта.
Известен способ [RU 2488776 C1, G01C 25/00, 27.07.2013], заключающийся в калибровке систематических значений параметров модели ошибок трехосного лазерного гироскопа, в том числе систематических составляющих смещения нулей, причем калибровку смещений нулей трехосных лазерных гироскопов с одним общим вибратором производят не по непосредственным показаниям трехосных лазерных гироскопов - приращениям интегралов проекций вектора абсолютной угловой скорости на оси чувствительности, а по результирующей погрешности определения пространственной ориентации посредством бесплатформенной инерциальной системы ориентации на основе трехосных лазерных гироскопов с одним общим вибратором.
Недостатком способа является его относительно узкая область применения.
Известен также способ [RU 2505785 C1, G01C 21/24, 27.01.2014], включающий измерения кажущихся ускорений движущегося в инерциальном пространстве объекта-носителя и жестко связанного с ним отделяемого объекта, производимые акселерометрами эталонной инерциальной навигационной системы объекта-носителя в базовой инерциальной системе координат (БИСК) и акселерометрами ведомой инерциальной навигационной системы отделяемого объекта в приборной инерциальной системе координат (ПИСК), которая образуется осями чувствительности акселерометров ведомой ИНС, передачи с определенной периодичностью результатов измерений акселерометров эталонной ИНС носителя в вычислительное устройство (ВУ) отделяемого объекта, причем в ходе движения, начиная с некоторого момента ti, по измерениям акселерометров эталонной ИНС и ведомой ИНС, накапливают кажущиеся скорости до достижения модулем вектора кажущейся скорости, получаемой по показаниям акселерометров ведомой ИНС, заданного значения, в этот момент ti+1 фиксируют в ВУ отделяемого объекта компоненты векторов кажущейся скорости, накопленные на интервале [ti, ti+1] по показаниям эталонной ИНС и ведомой ИНС, по этим данным определяют и запоминают в ВУ отделяемого объекта ошибку модуля вектора кажущейся скорости, вызванную погрешностями измерений ведомой инерциальной навигационной системы, и относительные проекции трех векторов кажущейся скорости, сформированные по показаниям каждого отдельного акселерометра ведомой ИНС, на орт кажущейся скорости, накопленной по показаниям акселерометров эталонной ИНС, повторяют такие действия не менее чем на двух интервалах активного движения, характеризующихся взаимно неколлинеарными направлениями накапливаемых на них и на первом интервале векторов кажущейся скорости, по показаниям акселерометров эталонной ИНС объекта-носителя и ведомой ИНС отделяемого объекта, накопленным хотя бы на одном участке движения [t1п, t2п], характеризующимся малыми значениями перегрузок по осям БИСК и достаточной продолжительностью участка, определяют в ВУ отделяемого объекта ошибки кажущейся скорости по осям чувствительности каждого акселерометра ведомой ИНС, вызванные совокупным влиянием погрешностей измерений этой ИНС, значение ошибки каждого акселерометра делят на величину интеграла от функции влияния погрешности измерений соответствующего акселерометра, независящей от перегрузки, на погрешность накапливаемой на интервале [t1п, t2п] по оси чувствительности данного акселерометра кажущейся скорости, тем самым определяют и запоминают параметры погрешностей измерений каждого акселерометра, независящие от перегрузки, из запомненных ошибок модулей измеренной кажущейся скорости, полученных не менее чем на трех интервалах активного движения, характеризующихся значительными перегрузками, вычитают результаты умножений значений параметров погрешностей, не зависящих от перегрузки, на величины интегралов от функции влияния данного параметра каждого акселерометра ведомой БИНС на ошибку модуля кажущейся скорости, набранной на соответствующем интервале активного движения, и определяют тем самым значения правых частей системы линейных уравнений для параметров погрешностей измерений акселерометров, зависящих от перегрузки, решают линейную систему, определяют из нее и запоминают значения параметров погрешностей измерений акселерометров, зависящих от перегрузки, по найденным значениям не зависящих и зависящих от перегрузки параметров погрешностей каждого акселерометра ведомой БИНС уточняют получаемые от этих акселерометров текущие значения кажущихся ускорений и используют их при численном интегрировании в реальном масштабе времени основного уравнения инерциальной навигации навигационной траектории отделяемого объекта.
Недостатком этого способа также является его относительно узкая область применения.
Близким по технической сущности к предложенному является способ определения температурных зависимостей масштабных коэффициентов, смещений нуля и матриц ориентации осей чувствительности лазерных гироскопов и маятниковых акселерометров в составе инерциального измерительного блока при стендовых испытаниях [RU 2566427 C1, G01C 21/24, 27.10.2015], основанный на проведении измерений параметров маятниковых акселерометров, а также обработке результатов измерений, в процессе которых устанавливают на стенде инерциальный измерительный блок с трехосным лазерным гироскопом и тремя маятниковыми акселерометрами, оснащенными датчиками вращения, которые ориентируют в направлении соответствующих осей собственной системы координат инерциального измерительного блока, на каждом такте измерений определяют количество импульсов для каждого из трех датчиков вращения лазерного гироскопа, пропорциональное проекции вектора угла поворота лазерного гироскопа за один такт измерений на каждую из трех осей чувствительности лазерного гироскопа, определяют средние за один такт измерений значения напряжений на выходе трех маятниковых акселерометров, пропорциональные проекциям вектора кажущегося линейного ускорения на оси чувствительности маятниковых акселерометров, и средние за один такт измерений значения температуры на каждом из трех датчиков вращения трехосного лазерного гироскопа и трех маятниковых акселерометров, по которым определяют температурные зависимости масштабных коэффициентов датчиков вращения лазерного гироскопа в отдельности для каждой моды «+» и «-» и для двух диапазонов угловых скоростей диапазона «низких» (Н) угловых скоростей, меньших значения, соответствующего величине амплитуды частотной подставки, и диапазона «высоких» (В) угловых скоростей, превышающих такую величину, из соотношений
где х, у, z - оси чувствительности датчиков вращения лазерного гироскопа; Tqa - текущая температура, измеряемая в соответствующем датчике вращения лазерного гироскопа, Т0 - фиксированное значение температуры, равное 25°С, температурные зависимости смещения нулей для каждого датчика вращения лазерного гироскопа определяют из соотношений, содержащих магнитную (М), изменяющую знак при переходе с одной моды на другую и немагнитную (НМ), не зависящую от моды, составляющие

температурные зависимости масштабных коэффициентов и смещений нулей маятниковых акселерометров из соотношений

где α = х, у, z - оси чувствительности МА; Таα - текущая температура, измеряемая в соответствующем маятниковом акселерометре, температурные зависимости недиагональных элементов матриц направляющих косинусов осей чувствительности лазерного гироскопа и маятниковых акселерометров
из соотношений
где Tq - температура лазерного гироскопа, осредненная по всем трем датчикам вращения, а диагональные элементы матриц направляющих косинусов осей чувствительности лазерного гироскопа и маятниковых акселерометров определяют через недиагональные, исходя из условия нормировки по строкам
Недостатком этого технического решения является его относительно узкая область применения, поскольку известный способ, хотя и позволяет определить температурные зависимости характеристик трехосного лазерного гироскопа (ЛГ) и маятниковых акселерометров (МА) в составе инерциального измерительного блока (ИИБ), в частности, масштабных коэффициентов датчиков вращения ЛГ и МА, смещений нуля датчиков вращения ЛГ и МА, матриц направляющих косинусов осей чувствительности ЛГ и МА в ортогональной системе координат, жестко связанной с корпусом ИИБ, но не может быть использовано для расчета ошибок начальной выставки ИНС без привязки к внешним ориентирам.
Наиболее близким по технической сущности к предложенному является способ определения ошибок ориентации измерительных осей гироскопов и маятниковых акселерометров в бортовой инерциальной навигационной системе [RU 2683144, Cl, G01C 25/00, 26.03.2019], основанный на проведении измерений параметров маятниковых акселерометров и лазерных гироскопов и обработке результатов измерений, при котором устанавливают на установочной платформе испытательного стенда бесплатформенную инерциальную навигационную систему с тремя лазерными гироскопами и тремя маятниковыми акселерометрами, при этом, бесплатформенную инерциальную навигационную систему устанавливают на установочной платформе испытательного стенда с одновременным формированием эталонной ортогональной системы координат XYZ, ось Y которой совпадает с внутренней осью испытательного стенда, две другие оси ориентированы таким образом, что ось X совпадает с внешней осью испытательного стенда, а ось Z дополняет оси X и Y до правой тройки осей, и определяют матрицы ориентации осей х, у, z в эталонной ортогональной системе координат XYZ отдельно по показаниям с гироскопов (Cq) и
после чего определяют углы неортогональности разноименных осей по каждой из матриц ориентации осей х, у, z с помощью скалярного произведения
а также углы между одноименными осями
Недостатком наиболее близкого технического решения является его относительно узкая область применения, поскольку этот способ, хотя и может быть использован для определения ошибок ориентации измерительных осей гироскопов и маятниковых акселерометров в бортовой инерциальной навигационной системе, но не может быть использован для определения ошибок начальной выставки ИНС без привязки к внешним ориентирам.
Задачей, на решение которой направлено предложенное изобретение, является расширение области применения и повышение точности определения ошибок начальной выставки ИНС в условиях невозможности привязки к внешним ориентирам.
Требуемый технический результат заключается в расширении области применения путем введения дополнительного арсенала технических средств (операций способа), обеспечивающих определение ошибок начальной выставки ИНС в условиях невозможности привязки к внешним ориентирам с одновременным повышением достоверности и точности определения этих ошибок.
Поставленная задача решается, а требуемый технический результат достигается тем, что, на горизонтальной поверхности стенда наносят прямую линию и устанавливают блок чувствительных элементов (БЧЭ) так, чтобы отмеченные на БЧЭ противоположные точки лежали на нанесенной прямой линии, запускают инерциальную навигационную систему (ИНС) и осуществляют начальную выставку, после чего переводят ИНС в режим навигации и поворачивают БЧЭ без отрыва от горизонтальной поверхности стенда на 180°° до совпадения нанесенных точек на БЧЭ с нанесенной прямой линией и сохраняют БЧЭ неподвижным и в течение 10 минут с интервалом 1 сек. производят запись в массив текущих проекций на оси географической системы горизонтальных скоростей Vx и Vz, после чего записанные массивы проекций скоростей аппроксимируют полиномами 3-го порядка по времени и определяют коэффициенты их линейных K1x, K1z и квадратичных K2x, K2z членов, по которым судят об ошибках начальной выставки инерциальной навигационной системы и их изменениях во времени.
На чертеже представлены:
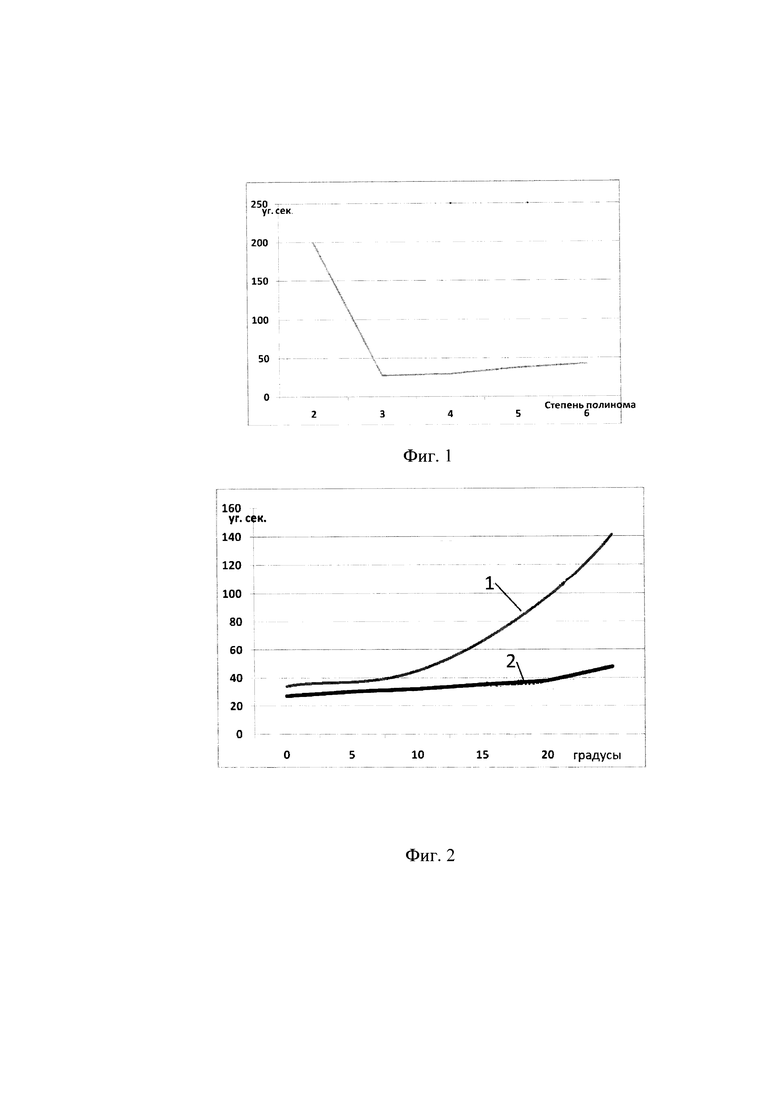
на фиг. 1 - зависимость погрешности оценки точности выставки азимута от степени полинома аппроксимации горизонтальных скоростей;
на фиг. 2 - зависимости погрешности оценки точности выставки азимута от погрешности поворота на 180°.
Способ измерения ошибок начальной выставки инерциальной навигационной системы без привязки к внешним ориентирам реализуется следующим образом.
Проверка точности начальной выставки является одним из обязательных этапов испытаний ИНС при производстве и эксплуатации. Обычно ИНС ставят на горизонтальную площадку, выставленную с помощью уровня и направляют ее ось на ориентир с известным азимутом. Результаты начальной выставки сравнивают с известными значениями азимута и наклонов.
Однако, не все помещения имеют известный аттестованный азимут, а при установке ИНС в камеру тепла и холода направить ИНС на известный азимут, как правило, не представляется возможным. Аналогично, и на вибростенде положение платформы сильно меняется после воздействия и измерить его сложно и дорого. Погрешность определения ошибок начальной выставки доходит до ±5° по азимуту и до ±2° по углам наклона, что неприемлемо.
Для определения ошибок начальной выставки инерциальной навигационной системы без привязки к внешним ориентирам предлагается воспользоваться расчетами линейных скоростей по показаниям гироскопов и акселерометров после проведения начальной выставки.
Физической основой возможности такой оценки является появление наблюдаемой погрешности скорости, вычисляемой в ИНС в режиме навигации, после поворота блока ее чувствительных элементов (БЧЭ) на угол 180°.
Основной причиной появления погрешности горизонтальных углов является наличие смещения нулей акселерометров, а погрешности азимута наличие дрейфов лазерных гироскопов (ЛГ). В алгоритме ИНС постоянно моделируется географическая система координат X, Y, Z (север-вертикаль-восток), по отношению к которой определяется текущая ориентация приборной системы координат. Ориентация этой моделируемой географической системы может отличаться от истинной на горизонтальные углы Δα и Δβ и азимут Δγ.
Например, пусть ΔаХ и ΔaZ - проекции смещений нулей акселерометров, a drX и drZ - проекции дрейфов гироскопов на оси X и Z, моделируемой географической системы координат. Погрешности горизонтальных углов, получаемые в ходе начальной выставки, будут равны
Δα=ΔaX/G, Δβ=ΔaZ/G,
а погрешность азимута
Δγ=drZ/Ωг,
где G - ускорение силы тяжести, Ωг - горизонтальная составляющая угловой скорости вращения Земли.
Погрешности определяемых в ходе начальной выставки горизонтальных углов и азимута из за неправильного проектирования ускорения силы тяжести G и угловой скорости Ωг компенсируют смещение нулей акселерометров и проекцию дрейфа ЛГ на ось Z моделируемой географической системы координат. Поэтому, если БЧЭ остается неподвижным после начальной выставки, то при последующей навигации не возникают погрешности скорости и погрешности углов определить нельзя.
Для возможности определения погрешностей углов сразу после окончания начальной выставки в режиме навигации БЧЭ поворачивается вокруг вертикальной оси на угол 180°. При этом смещения акселерометров и дрейфы ЛГ не меняют знаков а углы и азимут меняют знак на противоположный и вместо компенсации погрешностей происходит их удвоение. Из-за погрешностей углов Δα и Δβ в законе изменения погрешности скоростей ΔVx и ΔVz появляются линейные по времени члены

Из-за погрешности азимута Δγ в погрешности скорости по оси X появляется квадратичный член

Из (1) и (2) следует, что, если выделить линейный и квадратичный член в погрешности скорости, можно найти оценки погрешности горизонтальных углов и азимута, полученных в ходе начальной выставки.

Указанный поход реализуется следующим образом.
Выбирается подходящая ровная горизонтальная поверхность, например стенда, на которой наносится горизонтальная линия. Блок чувствительных элементов БЧЭ ИНС располагают на выбранной поверхности так, чтобы две нанесенные на БЧЭ противоположные точки совпадали с нанесенной линией. ИНС запускается в режиме начальной выставки продолжительностью, обычно на 10 минут.
После окончания начальной выставки ИНС переводят в режим навигации и сразу же осуществляют поворот БЧЭ на 180° до нового совпадения нанесенных точек на БЧЭ с нанесенной на поверхности стенда линией. Разворот желательно производить не отрывая блок от поверхности стенда, чтобы ось вращения не сильно изменяла свое положение в пространстве.
В новом положении БЧЭ остается неподвижным, обычно также в течение 10 минут. В этом режиме навигации с интервалом, например 1 с, производят запись в массив текущих проекций на оси географической системы горизонтальных скоростей Vx и Vz. Запись начинают после полной остановки БЧЭ после разворота.
Обработку результатов измерений проводится методом наименьших квадратов и записанные массивы проекций скоростей аппроксимируются полиномами 3-го порядка по времени и находят коэффициенты у линейных K1x, K1z и квадратичных K2x, K2z членов., по которым судят об ошибках начальной выставки инерциальной навигационной системы и их изменениях во времени.
Погрешности горизонтальных углов и азимута находятся по формулам (3).
Возможные погрешности предложенного способа исследовались на математической модели, имитирующей показания ЛГ и акселерометров при неподвижном положении и во время разворота на 180°. При этом полагалось, что горизонтальные гироскопы имеют дрейфы drx и drz, а горизонтальные акселерометры имеют смещение нуля Δах и Δaz. Из модели были известны истинные горизонтальные углы и азимут. Программа начальной выставки выдает полученные в ней углы и азимут, что позволяет вычислить истинные погрешности начальной выставки сравнивать результаты оценок по описываемому способу.
Созданный по модели массив показаний датчиков обрабатывался по программе алгоритма ИНС (начальная выставка - навигация) с получением массива скоростей на этапе навигации. Эти скорости, очевидно, являются погрешностями, так как на самом деле система неподвижна. Массив погрешностей скоростей обрабатывался по алгоритму, представленному выше с получением оценок погрешностей начальной выставки.
Выяснилось, что погрешности горизонтальных углов определяются достаточно хорошо в интервале 1-3 уг. с и в дальнейшем исследовалась точность определения погрешности азимута. Эта погрешность определяется по погрешности проекции скорости на географическую ось X.
Далее результаты всех численных экспериментов приводятся для следующих смещений нулей акселерометров
Δах=8*10-4 м/сек2
Δaz=-1*10-3 м/сек2,
и дрейфов ЛГ
drx=-0.02 град/час
drz=0.016 град/час
Точность оценки погрешности азимута зависит от степени полинома аппроксимации скорости. На фиг. 1 представлена эта зависимость, из которой следует, что оптимальной является аппроксимация полиномом 3-ей степени.
Точность оценки погрешности азимута зависит от погрешности поворота БЧЭ на 180° Эта зависимость появляется потому, что при погрешности поворота меняется не только знак но и величина проекции дрейфов ЛГ на ось Z, по которой определяется погрешность азимута. В первом приближении изменение величины проекции дрейфа на ось Z равно проекции дрейфа на ось X, умноженной на синус недоворота (переворота) до 180°.
Таким образом, если на этапе начальной выставки известен дрейф по географической оси X, то можно ввести соответствующую поправку или просто вычесть этот дрейф из показаний ЛГ на этапе навигации. Дрейф по оси X при начальной выставке можно определить, введя его в вектор состояния фильтра Калмана и дополнив соответствующим образом уравнения динамики.
На фиг. 2 представлены зависимости погрешности оценки точности выставки азимута от погрешности поворота на 180°. Кривая 1 погрешность определения азимута без учета дрейфа ЛГ по оси X. Кривая 2 получена, когда дрейф по оси X определялся при начальной выставке и вводился в показания ЛГ. Из фиг. 2 следует, что, если нет вычитания дрейфа по оси X, то поворот на 180° желательно производить с погрешностью не более 5°.
Таким образом, предлагаемый способ обеспечивает достижение требуемого технического результата, который заключается в расширении области применения путем введения дополнительного арсенала технических средств (операций способа), обеспечивающих определение ошибок начальной выставки ИНС в условиях невозможности привязки к внешним ориентирам с одновременным повышением достоверности и точности определения этих ошибок
Изобретение относится к приборостроению, в частности к инерциальным навигационным системам (ИНС), и может быть использовано для измерения ошибок начальной выставки ИНС без привязки к внешним ориентирам. Способ измерения ошибок начальной выставки ИНС заключается в том, что устанавливают блок чувствительных элементов (БЧЭ) так, чтобы отмеченные на БЧЭ противоположные точки лежали на нанесенной прямой линии. Запускают ИНС и осуществляют начальную выставку, после чего переводят ИНС в режим навигации и поворачивают БЧЭ без отрыва от горизонтальной поверхности стенда на 180° до совпадения нанесенных точек на БЧЭ с нанесенной прямой линией, сохраняют БЧЭ неподвижным и в течение 10 минут с интервалом 1 с производят запись в массив текущих проекций на оси географической системы горизонтальных скоростей Vx и Vz. После чего записанные массивы проекций скоростей аппроксимируют полиномами 3-го порядка по времени и определяют коэффициенты их линейных K1x, K1z и квадратичных K2x, K2z членов, по которым судят об ошибках начальной выставки инерциальной навигационной системы и их изменениях во времени. Технический результат – обеспечение определения ошибок начальной выставки ИНС в условиях невозможности привязки к внешним ориентирам с одновременным повышением достоверности и точности определения этих ошибок. 2 ил.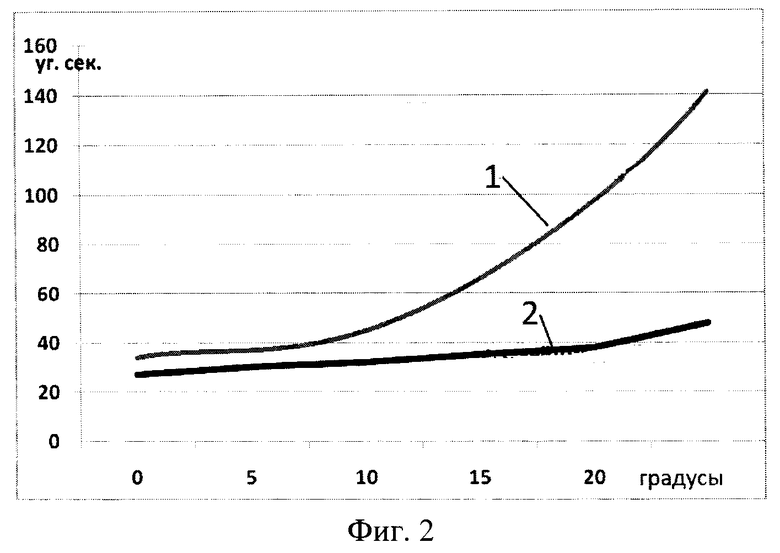
Способ измерения ошибок начальной выставки инерциальной навигационной системы без привязки к внешним ориентирам, заключающийся в том, что устанавливают блок чувствительных элементов (БЧЭ) так, чтобы отмеченные на БЧЭ противоположные точки лежали на нанесенной прямой линии, запускают ИНС и осуществляют начальную выставку, после чего переводят ИНС в режим навигации и поворачивают БЧЭ без отрыва от горизонтальной поверхности стенда на 180° до совпадения нанесенных точек на БЧЭ с нанесенной прямой линией и сохраняют БЧЭ неподвижным, в течение 10 минут с интервалом 1 с производят запись в массив текущих проекций на оси географической системы горизонтальных скоростей Vx и Vz, после чего записанные массивы проекций скоростей аппроксимируют полиномами 3-го порядка по времени и определяют коэффициенты их линейных K1x, K1z и квадратичных K2x, K2z членов, по которым судят об ошибках начальной выставки инерциальной навигационной системы и их изменениях во времени.
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБОК ОРИЕНТАЦИИ ИЗМЕРИТЕЛЬНЫХ ОСЕЙ ЛАЗЕРНЫХ ГИРОСКОПОВ И МАЯТНИКОВЫХ АКСЕЛЕРОМЕТРОВ В БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЕ | 2018 |
|
RU2683144C1 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2015 |
|
RU2617565C1 |
| КОМПЛЕКС НАЧАЛЬНОЙ ВЫСТАВКИ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 2003 |
|
RU2238522C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ИНЕРЦИАЛЬНОГО БЛОКА ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ НА ДВУХОСНОМ ПОВОРОТНОМ СТОЛЕ | 2019 |
|
RU2717566C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ ИЗМЕРИТЕЛЕЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ НА ЭТАПЕ НАЧАЛЬНОЙ ВЫСТАВКИ | 2005 |
|
RU2300081C1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| US 7680620 B2, 16.03.2010. | |||

