Ссылка на родственные заявки
Согласно настоящему изобретению испрашивается приоритет по дате подачи предварительной заявки на патент США №62/167577, поданной 28 мая 2015 года, предварительной заявки на патент США №62/318494, поданной 5 апреля 2016 года, предварительной заявки на патент США №62/167593, поданной 28 мая 2015 года, и предварительной заявки на патент США №62/269545, поданной 18 декабря 2015 года, раскрытия которых таким образом включены в данный документ посредством отсылки.
Уровень техники настоящего изобретения
Известны способы и системы для определения местоположения и выбора колонии микроорганизмов, а также для идентификации микроорганизмов с применением масс-спектрометрии, в частности, MALDI-TOF-MS (время-пролетная масс-спектрометрия с матрично-активированной лазерной десорбцией/ионизацией), и системы для ее осуществления. Такие системы и способы описаны в международной заявке № WO 2013/147610 за авторством Botma и соавт., раскрытие которой включено в данный документ по ссылке.
MALDI-анализ является полезным инструментом для решения проблем определения структуры в биохимии, иммунологии, генетике и биологии. Образцы подвергаются ионизации в газовой фазе, и анализатор времени пролета (TOF) применяют для измерения масс ионов. Анализ TOF начинается, когда ионы образуются и ускоряются до постоянной кинетической энергии, когда они попадают в область дрейфа. Они достигают детектора после периодов времени пролета, которые являются пропорциональными квадратному корню из их масс. Масс-спектр создается вследствие того, что ионы с разными массами достигают детектора в отличающиеся моменты времени.
Масс-спектрометрия обычно может являться мощным инструментом в области изыскания и разработки новых лекарственных средств, генотипирования и изучения протеома. MALDI, специфический тип масс-спектрометрии, уже применялся для характеристики и идентификации бактерий и микроорганизмов. Современные тенденции в исследованиях предполагают анализ все больших и больших количеств образцов с применением количеств отдельных образцов, варьирующих от уровней порядка микромоля до уровней количества вещества, соответствующих нескольким атомам. В результате этого образцы также становятся все меньше, и существует потребность в эффективном и надежном получении точного количества микроорганизмов и точном осаждении образца в полученном количестве на целевом планшете, применяемом в MALDI-инструменте.
При проведении типичной MALDI-TOF-MS образец, подлежащий анализу, наносят в виде пятна или осаждают на целевой планшет для MALDI, который может быть металлическим или может быть выполнен из другого материала, который будет обеспечивать возможность ионизации образца. Общепринятый способ для подготовки целевого планшета для MALDI предполагает непосредственное нанесение в виде пятна или намазывание образца, который, как предполагается, содержит микроорганизм из засеянной среды, на целевой планшет. После добавления образца часто загружают реактивы матрицы для поддержки ионизации образца. В некоторых случаях также добавляют реактивы для экстракции. В других случаях перед добавлением образца в целевой планшет может потребоваться осуществляемая отдельно стадия экстракции.
После того как целевой планшет подготовлен, его располагают в фиксированном положении в MALDI-инструменте. Целевой планшет имеет множество пятен для осаждения (например, от 24 до 384 пятен для осаждения на одном целевом планшете), и эти пятна для осаждения имеют фиксированную ориентацию относительно краев целевого планшета. Целевой планшет располагают на платформе с X-Y координатной сеткой таким образом, чтобы полученный образец колонии микроорганизмов мог осаждаться на выбранном пятне для осаждения. Высокий потенциал поддерживается между целевым планшетом и металлической контактной сеткой. Это напряжение может поддерживаться или подаваться в импульсном режиме в зависимости от желаемых результатов, и в камере создается вакуум. Излучение лазера направляют на образец/матрицу, и образуется шлейф ионов. Разница в напряжении используется для ускорения ионов в пролетной трубке, в результате чего их можно анализировать. В анализе непосредственно соотносится время пролета с массой ионизированного компонента.
Несколько параметров могут оказывать воздействие на качество результатов, в том числе ровность мишени, количество и тип матрицы, концентрация образца, электропроводность образца-мишени, точность размещения на пятне для осаждения, а также другие переменные.
Поскольку процесс требует сбора колоний и их осаждения прямо на планшете, собранный образец не может применяться в качестве источника образца для другого анализа. Следовательно, если желательным является осуществление другого теста на образце, другая часть образца должна быть получена для осуществления теста. Поскольку для нескольких тестов требуются несколько процедур сбора колоний, требуется увеличенное время обработки и создается возможность для получения противоречивых результатов вследствие различий между двумя собранными образцами. Таким образом, эффективный способ и автоматизированная система, с помощью которых получают образец микроорганизма из колонии и подвергают этот полученный образец нескольким тестам, продолжают оставаться желательными.
Сущность изобретения
Для того чтобы решить по меньшей мере одну из проблем, упомянутых выше, настоящим изобретением предполагается способ и автоматизированная система для определения местоположения и выбора колонии микроорганизмов на чашке для культивирования и идентификации микроорганизмов в выбранной колонии с применением MALDI и по меньшей мере одного другого теста. Способ включает в себя автоматизированные стадии определения местоположения и выбора колонии микроорганизмов на чашке для культивирования; получения образца выбранной колонии микроорганизмов; приготовления суспензии для полученного образца; дозирования части полученного образца на целевой планшет и помещения целевого планшета в аппарат для осуществления MALDI с целью идентификации образца выбранной колонии микроорганизмов и применения или переноса другой части суспензии для другого теста. В соответствии с одним вариантом осуществления второй тест представляет собой тест на чувствительность к антибиотикам (AST). AST может осуществляться с применением существующих способов автоматизированного проведения AST (BD Phoenix или Vitek) или может представлять собой диско-диффузионный тест методом Кирби-Бауэра, тест с разведением на диске, разведением в бульоне и агаре или другие способы.
В соответствии с одним вариантом осуществления суспензию готовят в кювете. Суспензию в кювете подвергают изучению с применением нефелометра для определения того, что мутность образца представляет собой значение в пределах предварительно определенного диапазона значений, который определен как подходящий для теста MALDI. Если нет, количество образца или количество разбавителя в суспензии корректируют для обеспечения суспензии с целевым значением мутности. После того как аликвоту суспензии удаляют из кюветы для MALDI, суспензию снова подвергают изучению и мутность суспензии определяют с помощью нефелометрии. В этот раз мутность суспензии оценивают с целью определения того, что мутность находится в пределах диапазона значений мутности, подходящего для применения образца во втором тесте (например, AST тесте). Если нет, количество разбавителя в суспензии корректируют для обеспечения суспензии, имеющей подходящую мутность.
Все стадии выполняются в автоматическом режиме, что по большей части избавляет от вышеупомянутых проблем, поскольку автоматизация избавляет от нежелательных отклонений и ошибок, которые приводят к неправильным результатам от MALDI-инструмента, дополнительным затратам и потере времени. Посредством автоматизации каждой из стадий эти проблемы могут быть преодолены по меньшей мере в значительной степени. В данной области техники воспринималось как должное, что только по меньшей мере некоторые из стадий могут осуществляться вручную, тем не менее, в противоположность этому, настоящее изобретение впервые обеспечивает возможность для автоматизации всех стадий, необходимых для определения местоположения и выбора колонии микроорганизмов и идентификации микроорганизмов в выбранной колонии с применением MALDI.
Посредством полной автоматизации приготовления суспензии настоящим изобретением обеспечивается точный и воспроизводимый способ применения суспензий для идентификации с помощью MALDI и AST или проведения других тестов. Способ дополнительно включает автоматизированную стадию наслаивания аликвоты раствора матрицы для MALDI на дозированную суспензию образца на целевом планшете. В соответствии с некоторыми вариантами осуществления обеспечивают возможность высыхания дозированной суспензии образца, осажденной на целевом планшете, перед наслаиванием аликвоты раствора матрицы для MALDI. Дополнительный вариант осуществления будет включать в себя нанесение реактива для экстрагирования, такого как муравьиная кислота, в виде пятен перед реактивом-матрицей для улучшенных результатов.
Этот альтернативный способ применения суспензии, кроме того, является чрезвычайно полезным в случае, когда другой тест или анализ должен быть проведен на образце колонии микроорганизмов. Такой дополнительный анализ может быть реализован особенно воспроизводимым и эффективным образом в соответствии с вариантом осуществления способа согласно настоящему изобретению, в котором способ дополнительно включает автоматизированные стадии получения второй аликвоты суспензии образца; осаждения второй аликвоты суспензии образца в бульон для проведения AST тестов и переноса инокулированной пробирки с бульоном для AST в аппарат для осуществления теста на чувствительность или другого дополнительного анализа. Следовательно, способ согласно настоящему изобретению можно применять для автоматического получения или сбора образца, который может быть введен в доступные инструменты для ID/AST, в том числе, без ограничения, ВАСТЕС™, Phoenix, MGIT, VITEK и BacT/Alert.
Полностью интегрированный вариант осуществления автоматизированного способа включает в себя ранее описанные стадии, объединенные в одну технологическую схему. В частности, предполагается платформа для чашки для культивирования, несущей микроорганизмы. Чашку для культивирования располагают на платформе. Предполагается автоматизированный инструмент для сбора, имеющий автоматизированное позиционирующее устройство с держателем инструмента для сбора, удерживающим инструмент для сбора (например, пипетку). Позиционирующее устройство выполнено с возможностью позиционирования инструмента для сбора в исходном положении над чашкой для культивирования и автоматического опускания инструмента для сбора в направлении к чашке для культивирования и поднятия инструмента для сбора от нее, а также для расположения инструмента для сбора в положении для переноса, соответственно. Инструмент для сбора располагается в держателе инструмента для сбора в позиционирующем устройстве. Инструмент для сбора располагается в исходном положении над чашкой для культивирования, и он автоматически опускается к чашке для культивирования, контактируя с микроорганизмом для сбора образца микроорганизма. Инструмент для сбора автоматически поднимается, перенося образец микроорганизма с чашки для культивирования в положение для переноса. Предполагается автоматический дозатор среды для суспензии для автоматического дозирования среды для суспензии в пробирку для суспензии, удерживаемую в держателе пробирки для суспензии. Автоматический дозатор автоматически подает исходное количество среды для суспензии в суспензию. Позиционирующее устройство автоматически перемещает инструмент для сбора из положения над чашкой для культивирования в положение над суспензией. Позиционирующее устройство опускает инструмент для сбора в среду для суспензии и поднимает его от среды для суспензии, содержащейся в пробирке для суспензии, и необязательно располагает инструмент для сбора в положении ожидания над пробиркой для суспензии, соответственно. Позиционирующее устройство обеспечивает колебания инструмента для сбора в виде линейного вертикального движения в течение периода времени, пока инструмент для сбора с образцом микроорганизма погружается в среду для суспензии. По истечении периода времени инструмент для сбора поднимается от среды для суспензии, содержащейся в пробирке для суспензии, в положение ожидания. Прибор, измеряющий мутность, (также называемый в данном документе нефелометром) предполагается для осуществления измерений мутности среды для суспензии, содержащейся в пробирке для суспензии, которая удерживается в держателе пробирки для суспензии. По меньшей мере по истечении периода времени, в течение которого инструмент для сбора колеблется, мутность среды для суспензии, содержащейся в пробирке для суспензии, которая удерживается в держателе пробирки для суспензии, измеряется с помощью прибора, измеряющего мутность, и обеспечивается конечное измеренное значение, указывающее на измеренную мутность.
Контроллер соединен с возможностью коммуникации с позиционирующим устройством, переносящим устройством, автоматическим дозатором среды для суспензии и прибором, измеряющим мутность, для автоматического контроля движения позиционирующего устройства, движения переносящего устройства, функционирования автоматического дозатора среды для суспензии и функционирования прибора, измеряющего мутность, соответственно. Контроллер управляет и отслеживает приготовление суспензии и функционирует для обеспечения суспензии, имеющей мутность в рамках технических требований, которые описаны выше.
Настоящее изобретение дополнительно относится к аппарату для автоматического приготовления суспензии образца микроорганизмов для осуществления вышеописанного способа для автоматического выбора колонии микроорганизмов на чашке для культивирования и приготовления суспензии образца микроорганизмов и применения данной суспензии для тестов как с целью по меньшей мере идентификации микроорганизма, так и для определения чувствительности к антибиотикам. Аппарат имеет:
платформу для чашки для культивирования, несущей микроорганизм;
инструмент для сбора и позиционирующее устройство с держателем инструмента для сбора для удерживания инструмента для сбора. Позиционирующее устройство размещено для позиционирования инструмента для сбора в исходном положении над чашкой для культивирования и для автоматического опускания и поднятия инструмента для сбора в направлении к чашке для культивирования и от нее, а также для позиционирования инструмента для сбора в положении для переноса, соответственно;
станцию для пробирки для суспензии для удерживания пробирки для суспензии;
автоматический дозатор среды для суспензии для автоматического дозирования среды для суспензии в пробирку для суспензии, удерживаемую в станции для пробирки для суспензии;
позиционирующее устройство для автоматического переноса инструмента для сбора от положения для переноса в позиционирующем устройстве к положению над пробиркой для суспензии, удерживаемой в держателе пробирки для суспензии, и для опускания инструмента для сбора в среду для суспензии и поднятия его от среды для суспензии, содержащейся в пробирке для суспензии, а также для расположения инструмента для сбора в положении ожидания над пробиркой для суспензии, удерживаемой в держателе пробирки для суспензии, соответственно, кроме того, переносящее устройство является выполненным с возможностью обеспечения колебания инструмента для сбора в виде линейного вертикального движения в течение периода времени;
прибор, измеряющий мутность, для осуществления измерений мутности среды для суспензии, содержащейся в пробирке для суспензии, которая удерживается в держателе пробирки для суспензии, и для обеспечения конечного измеренного значения, указывающего на измеренную мутность; и
контроллер, соединенный с возможностью коммуникации с позиционирующим устройством, автоматическим дозатором среды для суспензии и прибором, измеряющим мутность, для автоматического контроля движения позиционирующего устройства, движения переносящего устройства, функционирования автоматического дозатора среды для суспензии и функционирования прибора, измеряющего мутность, соответственно.
Контроллер:
a) определяет, является ли конечное измеренное значение мутности превышающим первое пороговое значение (максимальное значение), ранее сохраненное в памяти контроллера, если да, то контроллер обеспечивает возможность осуществления стадии b) (разведение); или является ли конечное измеренное значение мутности идентичным первому пороговому значению или ниже него и идентичным или превышающим второе пороговое значение (минимальное значение), ранее сохраненное в памяти контроллера, причем первое пороговое значение является большим, чем второе пороговое значение, если да, то контроллер обеспечивает возможность осуществления стадии с) (приемлемая мутность); или является ли конечное измеренное значение ниже второго порогового значения, если да, то контроллер обеспечивает возможность осуществления стадии d) (концентрирование);
b) управляет автоматическим дозатором среды для суспензии для подачи дополнительного количества среды для суспензии в пробирку для суспензии;
c) обеспечивает сигнал, что пробирка для суспензии с суспензией может быть удалена из держателя пробирки для суспензии для дальнейшей обработки; или
d) располагает дополнительный инструмент для сбора в держателе инструмента для сбора в позиционирующем устройстве способом, описанным для первого инструмента для сбора.
В соответствии с дополнительным вариантом осуществления аппарата согласно настоящему изобретению контроллер выполнен с возможностью управления прибором, измеряющим мутность, в результате чего измерение мутности среды для суспензии, содержащейся в пробирке для суспензии, которая удерживается в держателе пробирки для суспензии, с помощью прибора, измеряющего мутность, начинается до того, как инструмент для сбора погружается в среду для суспензии, содержащуюся в пробирке для суспензии.
В соответствии с преимущественным вариантом осуществления аппарата согласно настоящему изобретению на стадии d) первый инструмент для сбора предполагается в качестве дополнительного инструмента для сбора; и контроллер выполнен с возможностью управления переносящим устройством для расположения дополнительного инструмента для сбора в держателе инструмента для сбора в позиционирующем устройстве.
Предпочтительно, контроллер выполнен с возможностью определения дополнительного количества среды для суспензии на основании исходного количества среды для суспензии, конечного измеренного значения и значения первого и/или второго порогового значения. В частности, контроллер выполнен с возможностью управления автоматическим дозатором среды для суспензии в порядке, который описан выше.
Полностью автоматическое устройство согласно настоящему изобретению в случае, когда аппарат содержит автоматическое устройство, позиционирующее и удаляющее чашку для культивирования, для автоматического позиционирования чашки для культивирования, содержащей микроорганизм, на платформе и удаления чашки для культивирования с нее, соответственно, причем контроллер выполнен с возможностью коммуникационного соединения с автоматическим устройством, позиционирующим и удаляющим чашку для культивирования, для управления функционированием автоматического устройства, позиционирующего и удаляющего чашку для культивирования, и для автоматического позиционирования чашки для культивирования, содержащей микроорганизм, на платформе, и в случае, когда аппарат содержит автоматическое устройство, позиционирующее и удаляющее контейнер для суспензии, для автоматического позиционирования контейнера для суспензии на станции для контейнера для суспензии и удаления контейнера для суспензии из нее, соответственно, контроллер выполнен с возможностью коммуникационного соединения с автоматическим устройством, позиционирующим и удаляющим пробирку для суспензии, для управления функционированием автоматического устройства, позиционирующего и удаляющего контейнер для суспензии, и для автоматического позиционирования контейнера для суспензии в станции для контейнера для суспензии. В этом случае, следовательно, предпочтительно, чтобы контроллер был выполнен с возможностью обеспечения автоматического удаления чашки для культивирования с платформы с помощью автоматического устройства, позиционирующего и удаляющего чашку для культивирования, только после того, как был обеспечен сигнал, что контейнер для суспензии с суспензией может быть удален со станции для контейнера с пробиркой для суспензии для дальнейшей обработки. Кроме того, контроллер, следовательно, предпочтительно выполнен с возможностью автоматического удаления контейнера для суспензии со станции для контейнера для суспензии с помощью автоматического устройства, позиционирующего и удаляющего контейнер для суспензии, только после того, как был получен сигнал, что контейнер для суспензии с приготовленной суспензией в нем может быть удален со станции для контейнера для суспензии.
Кроме того, настоящее изобретение относится ко способу автоматического осаждения капли суспензии, содержащей образец колонии микроорганизмов, на пятно для осаждения на целевом планшете для MALDI. В соответствии с определенными вариантами осуществления система и способ сконфигурированы для применения суспензии в качестве источника образца для другого теста (например, AST).
Аппарат имеет пипетирующий инструмент и позиционирующее устройство с держателем пипетирующего инструмента для удерживания пипетирующего инструмента. Позиционирующее устройство выполнено с возможностью позиционирования пипетирующего инструмента в исходном положении над пробиркой для суспензии, удерживающей суспензию, содержащую образец колонии микроорганизмов. Пипетирующий инструмент автоматически опускает пипетирующий инструмент в суспензию и поднимает его из нее и располагает пипетирующий инструмент в положении для переноса, соответственно.
Пипетирующий инструмент собирает количество суспензии, поднимает пипетирующий инструмент с количеством суспензии в положение для переноса. Пипетирующий инструмент имеет камеру, находящуюся под давлением, закрытую регулируемым клапаном, в которой содержится количество среды для суспензии.
Обеспечивается держатель целевого планшета, который удерживает целевой планшет, причем целевой планшет имеет по меньшей мере одно пятно для осаждения.
Аппарат располагает целевой планшет в держателе целевого планшета.
Аппарат включает в себя переносящее устройство для автоматического переноса пипетирующего инструмента из положения для переноса в позиционирующем устройстве в положение над одним из пятен для осаждения на целевом планшете и для опускания инструмента для сбора (например, наконечника пипетки) на заранее определенное расстояние над целевым планшетом, создание в камере избыточного давления (например, давления в диапазоне около от 0,5 бара до 1,1 бара, хотя данный диапазон представлен с целью иллюстрации, а не ограничения) и открытие клапана на такой период времени, чтобы капля суспензии с объемом в диапазоне около от 0,5 мкл до 3,0 мкл осаждалась на одном из пятен для осаждения. Предпочтительно, форма пипетирующего инструмента является такой, что осаждение капли суспензии на целевом планшете происходит без брызг.
Пробирки для суспензии затем перемещаются во второе местоположение. Во втором местоположении мутность суспензии корректируют для второго теста (например, AST). Второе местоположение имеет нефелометр для определения того, является ли мутность суспензии подходящей для второго теста. Пипетирующий инструмент затем применяют для получения дополнительной суспензии и применяют данную суспензию для инокуляции сосуда для другого теста (например, AST).
В соответствии с одним вариантом осуществления описана автоматизированная система для приготовления суспензии одного образца, аликвоты из которой отбирают для идентификации (ID) микроорганизмов в образце и второго теста. В соответствии с другими вариантами осуществления автоматизированная система готовит суспензию одного образца, аликвоты из которой отбирают для идентификации (ID) микроорганизмов в образце и определения чувствительности к антибиотикам (AST) у микроорганизмов. Система включает в себя по меньшей мере первую секцию для выполнения ID анализа. Первая секция имеет механизм, который получает засеянную культуру либо с помощью автоматического переноса, либо вручную. Система либо включает в себя, либо находится в сообщении с визуализирующим аппаратом, который подвергает оптическому изучению планшет для культивирования, и на основании данного изображения распознают колонии, представляющие интерес. В соответствии с альтернативными вариантами осуществления изображения получают и колонии выбирают перед получением засеянной культуры системой. Система включает в себя механизм, который идентифицирует местоположение колонии, представляющей интерес, на планшете и предназначен для определения колонии, представляющей интерес, которая подлежит сбору для проведения тестов. Первая секция включает в себя автоматизированный роботизированный инструмент для сбора. Система также включает в себя контроллер, который осуществляет коммуникацию с роботизированным инструментом для сбора, направляя роботизированный инструмент для сбора для достижения пипетки, а затем перенося пипетку в местоположение над колонией, представляющей интерес. Верхняя крышка планшета была удалена для облегчения сбора колоний. Роботизированный инструмент для сбора затем опускает пипетку таким образом, чтобы кончик находился в контакте с колонией, представляющей интерес.
После того как колония была собрана, контроллер отправляет на роботизированный инструмент для сбора инструкции для переноса собранного образца на первую станцию для приготовления суспензии образца. Необязательно, система получает новое изображение планшета после того, как колония была собрана, для подтверждения того, что собранная колония происходит из правильного местоположения. Первая станция для суспензии образца имеет дозатор для суспензии, который дозирует жидкость для суспензии образца в пробирку или кювету для суспензии или другой подходящий сосуд. Первая станция для суспензии образца имеет нефелометр или другой подходящий аппарат для измерения мутности жидкости в пробирке или кювете для суспензии. Роботизированный инструмент для сбора высвобождает образец, перенесенный из планшета для культивирования, в жидкость для суспензии. В соответствии с некоторыми вариантами осуществления роботизированный инструмент для сбора обеспечивает колебание инструмента для сбора для облегчения высвобождения образца в суспензию. Нефелометр измеряет мутность суспензии, причем автоматизированная система в ответ на результат измерения мутности, который находится за пределами предварительно определенного значения мутности, корректирует суспензию, чтобы сделать ее концентрированной (т.е. мутной) до приемлемого уровня для ID анализа.
Первая секция дополнительно включает в себя первый роботизированный пипетатор. Первый роботизированный пипетатор получает первую аликвоту суспензии на первой станции и инокулирует приемный сосуд для применения в ID анализе. Приемный сосуд (например, планшет для MALDI) затем удаляется из системы и переносится в аппарат для осуществления MALDI. Приемный сосуд может переноситься либо механически, либо вручную. Пробирка или кювета для суспензии затем переносится в местоположение в первой секции, где готовится оставшаяся часть суспензии, которая должна применяться во втором анализе (например, AST анализе). Перенос осуществляется с помощью автоматизированных средств с применением конвейера.
Первая секция имеет второй нефелометр на второй станции для суспензии образца для измерения мутности суспензии. Первый роботизированный пипетатор дополнительно сконфигурирован для коррекции концентрации образца в пробирке или кювете для суспензии до предварительно определенной концентрации для второго анализа и для получения второй аликвоты суспензии образца, имеющей скорректированную концентрацию, и инокуляции пробирки для образца для AST анализа второй аликвотой суспензии. Такие пробирки для образца обычно называются пробирками с бульоном для AST.
Система необязательно имеет вторую секцию для подготовки панели для AST анализа. Автоматизированная система имеет автоматизированный механизм для переноса инокулированной пробирки для образца из первой секции ко второй секции. В соответствии с одним вариантом осуществления инокулированная пробирка для образца опускается через крышку для второй станции для суспензии образца и переносится под крышкой, появляясь из-под крышки во второй секции. Вторая секция имеет второй роботизированный пипетатор, который получает аликвоту из инокулированной пробирки для образца и инокулирует панель для AST полученной аликвотой. Вторая секция также имеет средство, с помощью которого осуществляет хранение, дозирование, манипуляции и вдавливание крышек 99 (см. фиг. 26) в отверстия для крышек на инокулированной панели. Вторая секция также имеет робот, который загружает инокулированную панель в аппарат, в котором осуществляют AST, аппарат для AST, сконфигурированный таким образом, чтобы он имел по меньшей мере две двери, причем первая дверь получает панель от робота, загружающего панель. Вторая дверь предназначена для ручной загрузки инокулированных панелей пользователем. Не требуется, чтобы аппарат для AST был расположен во второй секции системы, и он может находиться рядом с ней. Вторая секция также имеет контроллер, который соединен с возможностью коммуникации с AST инструментом для осуществления запроса, планирования доступа и открытия первой двери AST инструмента.
Краткое описание чертежей
Настоящее изобретение будет дополнительно разъяснено со ссылкой на следующие фигуры.
Фиг. 1 представляет собой фронтальную проекцию системы в соответствии с вариантом осуществления настоящего раскрытия, включающей в себя корпус системы.
Фиг. 2 представляет собой схематическое изображение размещения компонентов внутри корпуса системы с фиг. 1 в соответствии с вариантом осуществления настоящего раскрытия.
Фиг. 3 представляет собой блок-схему архитектуры системы с фиг. 1 в соответствии с вариантом осуществления настоящего раскрытия, включающую в себя иллюстративные компоненты, подходящие для реализации методов, описанных в данном документе.
Фиг. 4А представляет собой вид в перспективе варианта осуществления нефелометра с одной кюветой малого объема.
Фиг. 4В представляет собой вид сверху в разрезе нефелометра с одной кюветой малого объема с фиг. 4А, причем разрез изображен вдоль горизонтальной плоскости, проходящей через нефелометр.
Фиг. 5А представляет собой вид в перспективе одной кюветы в соответствии с вариантом осуществления настоящего раскрытия для применения с нефелометром с одной кюветой малого объема с фиг. 4А.
Фиг. 5В представляет собой вид в перспективе одной кюветы в соответствии с еще одним вариантом осуществления настоящего раскрытия для применения в нефелометре с одной кюветой с фиг. 4А.
Фиг. 6 представляет собой схему технологического процесса, иллюстрирующую один процесс согласно варианту осуществления для приготовления образца с применением нефелометра с фиг. 4А.
Фиг. 7А представляет собой вид в перспективе нефелометра с кюветой непрерывного действия в соответствии с вариантом осуществления настоящего раскрытия.
Фиг. 7В представляет собой вид сверху в разрезе нефелометра с кюветой непрерывного действия с фиг. 7А, причем разрез изображен вдоль горизонтальной плоскости, проходящей через нефелометр.
Фиг. 8 представляет собой вид в перспективе набор/полосу из множества линейных кювет малого объема в соответствии с вариантом осуществления настоящего раскрытия для применения с нефелометром с кюветой непрерывного действия с фиг. 7А.
Фиг. 9 представляет собой частично прозрачный вид в перспективе собранных в стопку кювет.
Фиг. 10 представляет собой вид в перспективе нефелометра в соответствии с еще одним вариантом осуществления настоящего раскрытия.
Фиг. 11 представляет собой вид с частичным разрезом нефелометра с фиг. 10, иллюстрирующий путь проходящего света к детектору в нем.
Фиг. 12 представляет собой дополнительный вид с частичным разрезом нефелометра с фиг. 10, иллюстрирующий путь проходящего света к детектору с фиг. 10, при этом также иллюстрируется источник света и детектор проходящего света.
Фиг. 13 представляет собой еще один вид с частичным разрезом нефелометра с фиг. 10, иллюстрирующий путь отраженного света к детектору в нем.
Фиг. 14 представляет собой древовидную схему принятия решений при приготовлении образца, в которой приготовление образца основывается на измеренной мутности образца.
Фиг. 15 иллюстрирует пипетку, удаляющую слизеподобный образец с целевого планшета, при этом начинает образовываться нить.
Фиг. 16 иллюстрирует целевой планшет с фиг. 15, причем пипетка все больше отдаляется от поверхности агара, дополнительно вытягивая нить.
Фиг. 17А представляет собой график зависимости от времени, иллюстрирующий изменение электрической емкости со временем, когда пипетка собирает образец, но нить не образуется.
Фиг. 17В представляет собой график зависимости от времени, иллюстрирующий изменение электрической емкости со временем, когда пипетка собирает образец, и образуется нить.
Фиг. 18 представляет собой технологическую схему, иллюстрирующую автоматизированный процесс в соответствии с одним вариантом осуществления настоящего изобретения.
Фиг. 19 представляет собой технологическую схему, сравнивающую временные рамки автоматизированного процесса с фиг. 18 с временными рамками сравнимого процесса, осуществляемого вручную.
Фиг. 20 представляет собой схематический вид сбоку системы с фиг. 1 в сочетании с инструментом для переноса картриджа и множеством инструментов для проведения тестов.
Фиг. 21 представляет собой схему иллюстрирующую систему для автоматического приготовления, переноса и тестирования образца, включающую в себя систему, инструмент для переноса картриджа и инструменты для проведения тестов с фиг. 20, а также включающую в себя иллюстративный картридж для микробиологического теста и контроллер 30 с фиг. 3.
Фиг. 22 представляет собой вид сзади в перспективе захватывающего приспособления для картриджа в инструменте для переноса картриджа в соответствии с вариантом осуществления настоящего раскрытия, когда оно приближается к картриджу в структуре, удерживающей картридж.
Фиг. 23 вид сбоку в перспективе захватывающего приспособления для картриджа с фиг. 21, на котором выделено поворотное соединение между планшетом захватывающего приспособления и лапой автоматизированного инструмента для переноса картриджа.
Фиг. 24 представляет собой вид спереди в перспективе захватывающего устройства для картриджа с фиг. 21.
Фиг. 25 иллюстрирует иллюстративный картридж для микробиологического теста с фиг. 21.
Фиг. 26 иллюстрирует поддон для картриджей, находящихся на временном хранении.
Фиг. 27А представляет собой вид спереди в перспективе одного из инструментов для проведения тестов с фиг. 20, включающего в себя дверь, открываемую вручную.
Фиг. 27B-27D представляют собой различные виды сзади инструмента для проведения тестов с фиг. 27А, включающего в себя автоматическую дверь такого инструмента.
Фиг. 28А представляет собой схему компонентов иллюстративного инструмента для проведения тестов, который может автоматически управляться контроллером с фиг. 3.
Фиг. 28В представляет собой схему компонентов иллюстративного инструмента для переноса, который может автоматически управляться контроллером с фиг. 3.
Фиг. 28С представляет собой схему, дополнительно иллюстрирующую примерную архитектуру контроллера с фиг. 3.
Фиг. 29 представляет собой схематическое изображение станции для сбора в соответствии с еще одним вариантом осуществления настоящего раскрытия.
Фиг. 30 представляет собой схематическое изображение размещения компонентов внутри корпуса системы с фиг. 1 в соответствии с еще одним вариантом осуществления настоящего раскрытия.
Подробное раскрытие настоящего изобретения
При использовании в контексте данного документа «кювета», и/или «микрокювета», и/или «кювета малого объема», и/или «LVC», и/или «сосуд для образца» или «сосуд» представляет собой контейнер, подходящий для приема жидкой суспензии. Контейнер предпочтительно является выполненным из оптически прозрачного пластика или стекла, которое предназначено для удерживания тестируемого образца в конкретном пространстве и ориентации для проведения теста или обработки.
Используемые в контексте данного документа «алгоритмы» представляют собой одну или более математических инструкций, которые применяются для манипуляций со значениями данных с целью принятия решения, исходя из математического значения, с последующим получением скорректированного или более точного значения данных, характерного для желаемого значения выходной величины.
Используемый в контексте в данного документа «усилитель» представляет собой электронную схему, которая применяется для приема более слабого исходного электронного сигнала и повышения его амплитуды с получением пропорционально усиленного нового сигнала, который является характерным для исходного сигнала. Подходящие усилители являются хорошо известными специалистам в данной области техники и не описываются подробно в данном документе.
Используемый в контексте данного документа «аналогово-цифровой преобразователь» или «А/D преобразователь» представляет собой электронное устройство, которое способно принимать переменный электрический сигнал и превращать его в число, которое является характерным для амплитуды исходного сигнала.
В контексте данного документа «разведение» означает раствор или суспензию, полученную посредством добавления жидкого разбавителя к концентрированному раствору или суспензии, что приводит в результате к новой суспензии или раствору с более низкой однородной концентрацией образца в растворе или суспензии, нежели исходная.
Используемый в контексте данного документа «лазер» или «диодный лазер» представляет собой электронное устройство, которое производит концентрированный и сфокусированный световой пучок, когда к нему подводится электрический ток.
Используемый в контексте данного документа «ослабляющий светофильтр» представляет собой устройство, которое помещено на пути света для поглощения и уменьшения количества света, когда он проходит через фильтр, что приводит в результате к тому, что свет, который прошел через фильтр, имеет пропорционально более низкую интенсивность, чем исходный источник света.
Используемый в контексте данного документа «светоизлучающий диод» или «LED» представляет собой электронное устройство, которое излучает свет специфического типа и ориентации, когда к нему подводится электрический ток.
Используемый в контексте данного документа «единица МакФарланда» представляет собой единицу измерения количества твердых частиц, диспергированных в суспензии в текучей среде или жидкости.
Используемый в контексте данного документа «нефелометр» представляет собой инструмент, который способен измерять количество твердых частиц в суспензии. В контексте данного документа «нефелометрия» относится к способу, посредством которого можно измерить количество суспендированных твердых веществ в суспензии.
Используемый в контексте данного документа «фотодиод» и/или «детектор» представляет собой электронное устройство, применяемое для измерения интенсивности света в заданной среде.
В контексте данного документа «насыщенный» и/или «насыщение» представляет собой точку, в которой детектор достигает максимальной величины выходного сигнала, которую он способен давать. Например, увеличение интенсивности света на фотодетекторе после насыщения не приводит к какому-либо дополнительному изменению выходного сигнала от детектора, который достиг своей максимальной рабочей нагрузки.
В контексте данного документа «суспензия» представляет собой раствор, в котором твердые вещества равномерно распределены в жидкости.
Используемая в контексте данного документа «мутность» представляет собой меру количества предполагаемых твердых веществ в растворе (т.е. помутнение жидкого образца).
В данном документе описаны способы и системы для приготовления одной суспензии из колонии микроорганизмов, которая является источником образца как для определения ID, так и чувствительности к антибиотикам у выбранной колонии микроорганизмов. Поскольку образец, применяемый для характеристики и идентификации микроорганизмов, обычно получают из чашки для культивирования с множеством колоний, выращиваемых в культуре, важно, чтобы образец был получен из колонии, представляющей интерес. Если образцы взяты из колоний, которые не представляют интерес, эффективное использование времени и MALDI-инструмента нарушается. Настоящим изобретением предполагается процесс автоматизированной идентификации и выбора колонии, представляющей интерес, из множества колоний, присутствующих на чашке. Процесс определения различий между колониями может быть по меньшей мере частично автоматизированным посредством обеспечения чашки для культивирования, содержащей ряд колоний микроорганизмов, получения первоначального изображения чашки для культивирования, включающего в себя все колонии микроорганизмов, отображения первоначального изображения чашки для культивирования, включающего в себя все колонии микроорганизмов, на дисплее и выбора по меньшей мере одной колонии микроорганизмов с первоначального изображения.
Таким образом исследователь или анализирующий специалист может выбрать колонии, представляющие интерес, исходя из образования и знаний. В соответствии с конкретным вариантом осуществления предполагается чашка для культивирования с отдельными идентификационными данными, идентифицирующими чашку для культивирования, такими как штрих-код, и способ дополнительно включает стадию сохранения первоначального изображения чашки для культивирования, включающего в себя все колонии, сохранения информации, которая касается по меньшей мере одной выбранной колонии микроорганизмов, сохранения идентификационных данных чашки для культивирования в памяти центрального управляющего компьютера. В соответствии с дополнительным вариантом осуществления исследователь или анализирующий специалист может в ручном режиме ввести инструкции по обработке, касающиеся обработки, которой должна быть подвергнута выбранная колония микроорганизмов из чашки для культивирования, причем инструкции по обработке хранятся в памяти центрального управляющего компьютера для дальнейшего применения.
В соответствии с одним вариантом осуществления колонии на планшете визуализируют в соответствии со способами, описанными в предварительной заявке на патент №62/151681, поданной 23 апреля 2015 года, озаглавленной «Сбор колоний с использованием контраста», а также поданной как международная заявка PCT/US 2016/028913, а также РСТ/ЕР 2015/052017, озаглавленная «Система и способ для получения изображения с применением контролируемой визуализации в высоком качестве», и при этом данные заявки включены в данный документ посредством ссылки. Обеспечение контрастирования разных колоний относительно среды для культивирования обеспечивает возможность определения различий между колониями для облегчения автоматизированного сбора колоний. Как обсуждается в других местах в данном документе, изображение засеянных культур может быть получено в отдельном аппарате перед получением изображения системой, описанной в данном документе, или система из данного документа может быть интегрирована с модулем, в котором получают такие изображения.
После того как первоначальное изображение чашки для культивирования получено, чашку для культивирования инкубируют в течение периода времени для обеспечения возможности роста микроорганизмов на планшете, если они присутствуют на нем. В соответствии с дополнительным вариантом осуществления настоящего изобретения способ включает автоматизированные стадии позиционирования чашки для культивирования на платформе для чашки для культивирования, получение изображения чашки для культивирования, размещенной на платформе, получение идентификационных данных чашки для культивирования, сравнение изображения, полученного с помощью визуализирующего устройства в составе устройства инструмента для сбора, с сохраненным первоначальным изображением чашки для культивирования с целью получения информации относительно местоположения выбранной колонии микроорганизмов и, необязательно, с целью получения инструкций по обработке, касающихся процессов, которые должны быть выполнены в отношении выбранной колонии микроорганизмов. Посредством сравнения изображения чашки для культивирования, когда она помещена в устройство инструмента для сбора, с первоначальным изображением, местоположение выбранных колоний может быть получено автоматически, например, посредством компьютеризированного сравнения изображений.
В соответствии с еще одним вариантом осуществления реперные метки на поверхности агара или на чашке для культивирования можно применять для повторного определения местоположения колоний. Эти реперные метки могут быть включены на планшете во время производства или могут быть нанесены пользователем, или они могут быть получены за счет органического роста или могут быть включены на поверхности чашки или агара с помощью любых подходящих средств. При применении аппарата с машинным зрением выявляют еще одну опорную точку, такую как центр чашки, относительно которой можно определять координаты на чашке. Штрих-код представляет собой один пример реперной метки. Местоположение колоний на чашке можно определить, исходя из их относительной удаленности от центра и углового смещения относительно нулевой точки смещения со штрих-кодом. После того как относительное местоположение колонии определено, чашка может перемещаться в другую систему, где осуществляются следующие две стадии. Выравнивание чашки по центру осуществляется, например, с помощью механических средств. Нулевую точку смещения со штрих-кодом выявляют, например, посредством вращения чашки, имея при этом фиксированный сенсор для выявления присутствия метки в виде штрих-кода и сканирования штрих-кода с использованием сканера штрих-кодов. В этой точке центр чашки становится известным, и нулевая точка смещения со штрих-кодом становится известной, и, следовательно, местоположение ранее упоминаемых колоний можно легко рассчитать, поскольку они сохраняются в виде расстояния до центра чашки и углового смещения относительно метки в виде штрих-кода. Для способа, который описан в данном документе, не требуется камера или система компьютерного зрения во второй системе (система для сбора колоний в этом примере) или любая другая система, которой требуется информация о положении колонии. Нулевая точка смещения, применяемая в этом примере, относится к метке в виде штрих-кода, но она может представлять собой любой уникальный реперный элемент у чашки, или она может быть нанесена на чашку, как указано выше.
Один автоматизированный способ и аппарат для сбора микроорганизмов с поверхности среды для культивирования описан в публикации патентного документа США №2014/0242570 (серийный номер заявки на патент США №14/347841), озаглавленной «Способ сбора клеточного материала и сборка для осуществления указанного способа», за авторством Botma и соавт., которая является общеизвестной и таким образом включена посредством ссылки.
Как описано у Botma и соавт., в соответствии с преимущественным вариантом осуществления способ дополнительно включает в себя стадии удаления инструмента для сбора на предварительно определенное расстояние от контактирующего положения в направлении проверочного положения и удерживания указанного инструмента для сбора в указанном проверочном положении, а также измерения электрической емкости системы, состоящей из инструмента для сбора и опоры, в проверочном положении. В некоторых случаях материал образца, подлежащий сбору, является очень липким или вязким. Когда инструмент для сбора после вступления в контакт с таким материалом образца удаляется от образца, тонкая нить может оставаться в контакте между инструментом для сбора и материалом образца, который остается в чашке для культивирования. Эта тонкая нить может рваться и, возможно, загрязнять устройство инструмента для сбора. Посредством измерения электрической емкости инструмента для сбора и опоры инструмента для сбора в проверочном положении, которое может находиться, например, в нескольких миллиметрах над чашкой для культивирования, представляется возможным выявить присутствие такой нити для того, чтобы можно было принять соответствующие меры. В соответствии с такими вариантами осуществления, в которых обеспечен держатель инструмента для сбора для удерживания с возможностью снятия инструмента для сбора, причем держатель инструмента для сбора является приспособленным для захвата и высвобождения инструмента для сбора, может применяться автоматизированная реакция на выявление оставшейся нити. Например, инструмент для сбора может высвобождаться из держателя инструмента для сбора, если электрическая емкость, измеренная в проверочном положении, отличается от начальной электрической емкости в начальном положении вследствие того, что инструмент для сбора попадает в чашку для культивирования, после чего чашка для культивирования может быть удалена. Эти стадии можно легко осуществлять автоматизированным способом так, чтобы занимающее много времени человеческое вмешательство не было необходимым для удаления инструмента для сбора и чашки для культивирования.
В соответствии с одним вариантом осуществления наконечник пипетки применяют для того, чтобы собрать колонию с поверхности среды для культивирования (например, агара), на которой расположена колония. Пипетка может втягивать колонию в наконечник с применением всасывания в соответствии с одним вариантом осуществления. В соответствии с другими вариантами осуществления всасывание не применяют для втягивания колонии в наконечник пипетки, и только силы контакта между колонией и наконечником пипетки нагнетают колонию в наконечник пипетки.
В соответствии с еще одним дополнительным вариантом осуществления способа согласно настоящему изобретению способ включает стадию автоматического приготовления суспензии образца микроорганизмов. При таком способе осуществляют следующие стадии.
Обеспечивают первый инструмент для сбора вместе с позиционирующим устройством с держателем инструмента для сбора для удерживания инструмента для сбора (например, инструмента для сбора в виде наконечника пипетки, описанного ранее). Позиционирующее устройство выполнено с возможностью позиционирования инструмента для сбора в исходном положении над полученным местоположением выбранной колонии микроорганизмов на чашке для культивирования. Позиционирующее устройство автоматически опускает инструмент для сбора в направлении чашки для культивирования и поднимает его от чашки для культивирования, а также располагает инструмент для сбора в положении для переноса, соответственно.
Первый инструмент для сбора располагается в держателе инструмента для сбора в позиционирующем устройстве. Инструмент для сбора затем располагается в исходном положении над полученным местоположением выбранной колонии микроорганизмов на чашке для культивирования. Инструмент для сбора затем автоматически опускается для контакта с колонией микроорганизмов для сбора образца микроорганизма. Инструмент для сбора затем автоматически поднимается вместе с собранным образцом микроорганизма от чашки для культивирования в положение для переноса.
Предполагается держатель пробирки для суспензии, который удерживает по меньшей мере одну пробирку для суспензии. Пробирка для суспензии располагается в держателе пробирки для суспензии. Несмотря на то, что она называется в данном документе пробиркой для суспензии, сосуд для суспензии может представлять собой пробирку, пузырек, кювету или другой сосуд для хранения раствора суспензии.
Предполагается автоматический дозатор среды для суспензии для автоматического дозирования среды для суспензии в пробирку для суспензии, удерживаемую в держателе пробирки для суспензии. Автоматический дозатор автоматически подает исходное количество среды для суспензии в пробирку для суспензии, удерживаемую в держателе пробирки для суспензии. Также предполагается переносящее устройство, которое может присутствовать отдельно от позиционирующего устройства или в виде части позиционирующего устройства, для автоматического переноса инструмента для сбора (уже собравшего образец) в положение над пробиркой для суспензии, удерживаемой в держателе пробирки для суспензии. Переносящее устройство опускает инструмент для сбора (и образец, переносимый инструментом для сбора) в среду для суспензии, содержащуюся в пробирке для суспензии, и поднимает его оттуда. Переносящее устройство также располагает инструмент для сбора в положении ожидания над пробиркой для суспензии, удерживаемой в держателе пробирки для суспензии, соответственно.
Переносящее устройство обеспечивает колебание первого инструмента для сбора в виде линейного вертикального движения в течение периода времени, пока первый инструмент для сбора с образцом микроорганизма погружается в среду для суспензии для того, чтобы высвободить образец в среду для суспензии и перемешать суспензию. По истечении периода времени первый инструмент для сбора поднимается от среды для суспензии, содержащейся в пробирке для суспензии, в положение ожидания. В качестве альтернативы, вместо обеспечения колебания для высвобождения образца микроорганизма, повторяющееся всасывание с использованием инструмента для сбора в виде наконечника пипетки, когда он частично погружен в среду для суспензии, может быть использовано для выполнения высвобождения микроорганизма и перемешивания суспензии.
В автоматизированном способе предполагается прибор, измеряющий мутность, который измеряет мутность среды для суспензии, содержащейся в пробирке для суспензии, которая удерживается в держателе пробирки для суспензии. В соответствии с одним вариантом осуществления этот прибор, измеряющий мутность, является таким, как описано в предварительной заявке на патент США с серийным номером 62/056911, поданной 29 сентября 2014 года, и в патентном документе PCT/IB 2015/00272 (опубликованном как WO 2016/051267), которые принадлежат одному и тому же правообладателю, и которые включены в данный документ посредством ссылки во всей своей полноте.
По истечении периода времени, в течение которого обеспечивается колебание инструмента для сбора, мутность среды для суспензии, содержащейся в пробирке для суспензии, которая удерживается в держателе пробирки для суспензии, измеряют с помощью прибора, измеряющего мутность, и обеспечивается конечное измеренное значение, указывающее на измеренную мутность.
В соответствии с дополнительными вариантами осуществления предполагается контроллер, который соединен с возможностью коммуникации с позиционирующим устройством, переносящим устройством, автоматическим дозатором среды для суспензии и прибором, измеряющим мутность. Такой контроллер автоматически управляет движением позиционирующего устройства, движением переносящего устройства, функционированием автоматического дозатора среды для суспензии и функционированием прибора, измеряющего мутность, соответственно.
Применительно к фиг. 6 в соответствии с одним вариантом осуществления контроллер определяет, является ли конечное измеренное значение мутности превышающим первое пороговое значение (максимальное значение), ранее сохраненное в памяти контроллера. Если да, то осуществляется стадия b) (разведение, описанное ниже). Если конечный результат измерения мутности является идентичным первому пороговому значению или ниже него и около соответствует или превышает второе пороговое значение, ранее сохраненное в памяти контроллера, причем первое пороговое значение является равным или большим, чем второе пороговое значение, то осуществляется стадия с) (приемлемая мутность, описанная ниже). Если конечное измеренное значение ниже второго порогового значения, то осуществляется стадия d) (повышение мутности, описанное ниже).
На стадии b) автоматический дозатор среды для суспензии автоматически управляется для подачи дополнительного количества среды для суспензии в пробирку для суспензии. На стадии с) обеспечивается сигнал, что пробирка для суспензии с суспензией удаляется из держателя пробирки для суспензии для дальнейшей обработки.
В соответствии со стадией d) получают дополнительный инструмент для сбора, и он располагается в держателе инструмента для сбора в позиционирующем устройстве, как описано выше. Позиционирующее устройство располагает дополнительный инструмент для сбора в исходном положении над чашкой для культивирования, автоматически опускает дополнительный инструмент для сбора к чашке для культивирования в контакт с микроорганизмом для сбора дополнительного образца микроорганизма, автоматически поднимает дополнительный инструмент для сбора с образцом микроорганизма от чашки для культивирования в положение для переноса, все как описано для первого сбора. Несмотря на то что инструмент для сбора, описанный в данном документе, представляет собой пипетку, другие подходящие инструменты для сбора описаны в предварительной заявке на патент США №62/144574, поданной 8 апреля 2015 года и озаглавленной «Устройство и аппарат для сбора проросших микробов с поверхности полужидкой среды», и международной заявки PCT/US 2016/026625, поданной 8 апреля 2016 года, которые включены данный документ посредством ссылки.
Переносящее устройство автоматически переносит дополнительный инструмент для сбора с дополнительным образцом микроорганизма из положения для переноса в позиционирующем устройстве в положение над пробиркой для суспензии, удерживаемой в держателе пробирки для суспензии, и опускает дополнительный инструмент для сбора с дополнительным образцом микроорганизма в среду для суспензии, содержащуюся в пробирке для суспензии, и обеспечивает колебание дополнительного инструмента для сбора в виде линейного вертикального движения в течение периода времени, пока дополнительный инструмент для сбора с дополнительным образцом микроорганизма погружен в среду для суспензии. По истечении периода времени инструмент для сбора поднимается от среды для суспензии, содержащейся в пробирке для суспензии, в положение ожидания. По истечении периода времени, в течение которого обеспечивается колебание дополнительного инструмента для сбора, мутность среды для суспензии, содержащейся в пробирке для суспензии, которая удерживается в держателе пробирки для суспензии, измеряют с помощью прибора, измеряющего мутность, и обеспечивается дополнительное конечное измеренное значение, указывающее на измеренную мутность.
После того как образец был получен, в соответствии с еще одним вариантом осуществления пипетирующая система может осуществлять серию быстрых всасываний и выдуваний через наконечник пипетки в жидкой суспензии. Например, пипетирующая система может повторять серию отборов до около 24 раз за 20 секундный период и дозирует образец объемом около 250 мкл или 300 мкл. Повторяющееся действие создает высокие сдвиговые усилия на наконечнике пипетки. Высокие сдвиговые усилия обеспечивают возможность диспергирования сгустков или слизеподобных нитей в образце, содержащем микроорганизмы, образуя более однородную суспензию.
Таким методом возможно приготовить суспензию образца микроорганизма усовершенствованным автоматизированным методом, в то время как посредством контроллера и прибора, измеряющего мутность, представляется возможным обеспечение пробирки для суспензии, содержащей среду для суспензии, которая содержит количество микроорганизма, всегда являющееся достаточным (и воспроизводимым) для осуществления корректного анализа микроорганизма.
В соответствии с одним дополнительным вариантом осуществления способа для автоматического приготовления суспензии образца микроорганизмов согласно настоящему изобретению контроллер выполнен с возможностью осуществления стадии измерения мутности среды для суспензии, которая содержится в пробирке для суспензии, удерживаемой в держателе пробирки для суспензии, с помощью прибора, измеряющего мутность, в течение дополнительного периода времени, в ходе которого обеспечивается колебание инструмента для сбора, причем прибор, измеряющий мутность, выполнен с возможностью предоставления контроллеру измеренного в реальном масштабе времени значения, которое указывает на измеренную мутность в течение периода времени, в ходе которого обеспечивается колебание инструмента для сбора. Таким образом может быть получено крайне быстрое автоматическое определение количества микроорганизма в суспензии. В частности, если в ходе колебаний измеренное в реальном масштабе времени значение мутности является равным первому пороговому значению или ниже его и является равным второму пороговому значению или больше него, контроллер управляет движением переносящего устройства таким образом, чтобы инструмент для сбора поднимался из положения ожидания, и контроллер дополнительно обеспечивает сигнал о том, что пробирка для суспензии с суспензией может быть удалена из держателя пробирки для суспензии для дальнейшей обработки. Таким образом, колебание инструмента для сбора прекращается, когда среда для суспензии содержит достаточное количество микроорганизмов, в результате чего способ может осуществляться с крайне эффективным использованием времени.
Взаимное расположение инструмента для сбора и сенсоров прибора, измеряющего мутность, является таким, чтобы во время колебания инструмента для сбора инструмент для сбора не преграждал путь прибору, измеряющему мутность.
В соответствии с дополнительным вариантом осуществления способа автоматического приготовления суспензии образца микроорганизмов согласно одному варианту осуществления в данном документе контроллер выполнен с возможностью управления прибором, измеряющим мутность, таким образом, чтобы стадия измерения мутности среды для суспензии, которая содержится в пробирке для суспензии, удерживаемой в держателе пробирки для суспензии, с помощью прибора, измеряющего мутность, начиналась перед тем, как инструмент для сбора погрузится в среду для суспензии, которая содержится в пробирке для суспензии. Таким образом, например, возможно проверить, не является ли применяемая исходная среда для суспензии загрязненной. Более того, это обеспечивает указание исходного значения для мутности, которое является полезным при определении конечного измеренного значения.
В соответствии с еще одним дополнительным вариантом осуществления способа автоматического приготовления суспензии образца микроорганизмов способ дополнительно включает стадию обеспечения держателя пробирки для суспензии для удерживания пробирки для суспензии. Держатель пробирки для суспензии может быть адаптирован для вращения пробирки для суспензии, удерживаемой в поворотном держателе пробирки для суспензии. В соответствии с дополнительными вариантами осуществления контроллер выполнен с возможностью коммуникативного соединения с поворотным держателем пробирки для суспензии для управления вращением держателя пробирки для суспензии. Контроллер дополнительно размещен таким образом, чтобы пробирка для суспензии вращалась во время измерения мутности среды для суспензии, содержащейся в пробирке для суспензии. Такое вращение пробирки для суспензии обеспечивает возможность измерений мутности внутри пробирки для суспензии в ряде положений, которые располагаются с интервалами друг относительно друга при вращении, что приводит к более корректному окончательному измерению мутности суспензии. Вращение само по себе не является необходимым для высвобождения образца из инструмента для сбора. Колебание инструмента для сбора, которое описано выше, является более чем достаточным для высвобождения образца.
Несмотря на то что можно применять дополнительный инструмент для сбора, который отличается от первого инструмента для сбора, способ можно осуществлять экономным образом, когда на стадии d) первый инструмент для сбора обеспечивают в качестве дополнительного инструмента для сбора; и позиционирование дополнительного инструмента для сбора в держателе инструмента для сбора в позиционирующем устройстве осуществляется переносящим устройством под управлением контроллера.
В соответствии с еще одним дополнительным вариантом осуществления способа автоматического приготовления суспензии образца микроорганизмов согласно настоящему изобретению дополнительное количество среды для суспензии определяется контроллером, исходя из исходного количества среды для суспензии, конечного измеренного значения и величины первого и/или второго порогового значения. Это делает возможным точный контроль количества среды для суспензии, которая используется. В результате чего среда для суспензии сохраняется.
Поскольку в соответствии с некоторыми вариантами осуществления инструмент для сбора колеблется в виде вертикального линейного движения относительно пробирки для суспензии, горизонтальное поперечное сечение пробирки для суспензии может быть относительно малым. Это делает возможным применение меньших объемов суспензии. В соответствии с одним вариантом осуществления контроллер приводит к дозированию исходного количества жидкости для суспензии, составляющего около от 0,1 мл до 5 мл, и предпочтительно менее чем около 1 мл (около 300 мкл в одном примере). В соответствии с другими вариантами осуществления объем жидкости для суспензии составляет от около 0,5 мл до около 2 мл. В соответствии с одним вариантом осуществления дозируемый объем составляет 300 мкл. Такое относительно небольшое количество среды для суспензии является достаточным для приготовления правильной суспензии образца микроорганизмов.
В таком способе автоматического приготовления суспензии образца микроорганизмов представляется возможным применение в качестве сосуда для суспензии пробирки, пузырька или кюветы, имеющей максимальный размер поперечного сечения от около 2 до около 12 мм, предпочтительно около 3 мм, который является относительно небольшим по сравнению с традиционными пробирками для суспензии, которые имеют диаметр около 16 мм. Пробирка может иметь квадратное, прямоугольное или круглое поперечное сечение, и фактическая форма кюветы в значительной степени зависит от выбранной конструкции. В соответствии с одним вариантом осуществления пробирка является круглой с диаметром от около 6 до около 12 мм. В соответствии с одним преимущественным вариантом осуществления диаметр составляет около 10 мм. С такой относительно небольшой пробиркой для суспензии надлежащее высвобождение образца из инструмента для сбора получают, когда контроллер выполнен с возможностью управления колебанием переносящего устройства таким образом, чтобы инструмент для сбора колебался с частотой от около 5 Гц до около 250 Гц. Выбор частот в пределах этого диапазона в значительной степени зависит от выбранной конструкции и будет зависеть от составляющих суспензии, которую образуют. В случае суспензий, которые образуют из образца и раствора, которые легко диспергируются между собой, частоты 5-12 Гц могут быть достаточными. В случае составляющих, которые не образуют суспензию столь легко, может требоваться частота около 100 Гц или выше. Предпочтительно, контроллер выполнен с возможностью управления колебанием переносящего устройства таким образом, чтобы инструмент для сбора колебался с амплитудой, составляющей от около 0,5 мм до около 4 мм, предпочтительно от около 2 мм до около 3 мм и наиболее предпочтительно около 1 мм, что приводит в результате к оптимальному высвобождению образца из инструмента для сбора. В вариантах осуществления, в которых контроллер выполнен с возможностью управления колебанием переносящего устройства, такой период времени, в течение которого инструмент для сбора колеблется, составляет от около 3 секунд до около 120 секунд, предпочтительно около 30-60 секунд, весь образец может высвобождаться из инструмента для сбора практически во всех случаях. Для эффективности и пропускной способности является преимущественным, если обеспечение колебания требуется в течение только около 3-10 секунд, причем среднее минимальное время колебания составляет около 6 секунд.
Величины частоты, амплитуды и длительности зависят от свойств конкретного микроорганизма и, например, от его адгезии к инструменту для сбора. В соответствии с одним вариантом осуществления осмотр с помощью визуализации можно применять для того, чтобы сделать вывод: высвободился или нет образец по меньшей мере большей частью из инструмента для сбора при первом применении вышеупомянутых предпочтительных значений. Если некоторое количество материала остается на инструменте для сбора, то вертикальное колебание повторяется в пределах заданных диапазонов при отличающихся величинах.
Автоматизированный способ приготовления суспензии образца микроорганизмов дополнительно включает в себя обеспечение автоматического устройства, позиционирующего и удаляющего чашку для культивирования для автоматического позиционирования и удаления чашки для культивирования с платформы. Контроллер соединен с возможностью коммуникации с автоматическим устройством, позиционирующим и удаляющим чашку для культивирования, для управления функционированием автоматического устройства, позиционирующего и удаляющего чашку для культивирования. Таким образом, позиционирование чашки для культивирования (несущей целевые микроорганизмы) на платформе может осуществляться автоматически под управлением контроллера. В соответствии с другими вариантами осуществления обеспечивается автоматическое устройство, позиционирующее и удаляющее пробирку для суспензии, которое автоматически позиционирует пробирки для суспензии в держателе пробирки для суспензии и удаляет их из держателя пробирки для суспензии, соответственно. Контроллер соединен с возможностью коммуникации с автоматическим устройством, позиционирующим и удаляющим пробирку для суспензии, для управления функционированием автоматического устройства, позиционирующего и удаляющего пробирку для суспензии, в результате чего позиционирование пробирки для суспензии в держателе пробирки для суспензии может осуществляться автоматически под управлением контроллера. В преимущественном случае контроллер, следовательно, размещен таким образом, чтобы обеспечивалась возможность автоматического удаления чашки для культивирования с платформы автоматическим устройством, позиционирующим и удаляющим чашку для культивирования, только после обеспечения сигнала о том, что пробирка для суспензии с суспензией может быть удалена из держателя пробирки для суспензии для дальнейшей обработки. В соответствии с другими дополнительными вариантами осуществления контроллер размещен таким образом, чтобы держатель пробирки для суспензии автоматически удалялся из держателя пробирки для суспензии автоматическим устройством, позиционирующим и удаляющим пробирку для суспензии, только после обеспечения сигнала о том, что пробирка для суспензии с суспензией может быть удалена из держателя пробирки для суспензии для дальнейшей обработки.
В соответствии с еще одним дополнительным вариантом осуществления способа согласно настоящему изобретению идентификационная метка обеспечивается на пробирке для суспензии. Согласно способу идентификационная метка пробирки для суспензии хранится вместе со свойствами суспензии со ссылкой на идентификационные данные чашки для культивирования, из которой была получена выбранная колония микроорганизмов, в памяти центрального управляющего компьютера. Это гарантирует, что способ не только может выполняться автоматически крайне эффективным образом, но также обеспечивает корректную и быструю обработку полученных результатов анализа.
В соответствии с дополнительным вариантом осуществления способа обеспечивается описанный в данном документе пипетирующий инструмент (либо отдельно, либо устройство инструмента для сбора является адаптированным для получения и применения пипеток) для осаждения аликвоты (или нескольких аликвот) суспензии на планшет для MALDI, а также для осаждения аликвоты суспензии для другого последующего анализа (например, AST). Позиционирующее устройство обеспечивается держателем пипетирующего инструмента для удерживания пипетирующего инструмента. Позиционирующее устройство выполнено с возможностью позиционирования пипетирующего инструмента в исходном положении над пробиркой для суспензии. Позиционирующее устройство автоматически опускает пипетирующий инструмент в суспензию и поднимает его от суспензии, а также служит для позиционирования пипетирующего инструмента в положении для переноса, соответственно. Пипетирующий инструмент принимается держателем пипетирующего инструмента в позиционирующем устройстве. Позиционирующее устройство располагает пипетирующий инструмент в исходном положении над пробиркой для суспензии, опускает пипетирующий инструмент в суспензию в пробирке для суспензии, производит операции пипетирующим инструментом для сбора количества суспензии и поднимает пипетирующий инструмент с количеством суспензии в положение для переноса. Пипетирующий инструмент имеет камеру, находящуюся под давлением, закрытую регулируемым клапаном, в которой содержится количество среды для суспензии.
Способ обеспечивает держатель целевого планшета для удерживания целевого планшета, причем целевой планшет имеет по меньшей мере одно пятно для осаждения. Целевой планшет располагается в держателе целевого планшета. Обеспечивается переносящее устройство, которое автоматически переносит пипетирующий инструмент из положения для переноса в позиционирующем устройстве в положение над одним из пятен для осаждения на целевом планшете и опускает пипетирующий инструмент на предварительно определенное расстояние над целевым планшетом. Камера находится под давлением, которое находится в диапазоне от около 0,5 бара до 1,1 бара, и клапан затем открывается в течение такого периода времени, чтобы капля суспензии с объемом в диапазоне около 0,5-3,0 мкл осаждалась на пятне для осаждения, в частности, покрывая не более приблизительно половины одного из пятен для осаждения на целевом планшете. После этого пипетирующий инструмент поднимается от целевого планшета. В зависимости от свойств конкретного микроорганизма, например, его способности к прилипанию, давление и время открытия можно корректировать для получения небольшой капли суспензии, которая может быть получена воспроизводимо и которая в результате автоматизированного процесса может быть точно осаждена на целевом планшете.
Пипетирующий инструмент применяют для получения большего количества суспензии ранее описанным образом. Пипетирующий инструмент затем применяют для дозирования суспензии в сосуд для другого анализа (например, подходящий сосуд для проведения тестов на чувствительность к антибиотикам (AST)).
Во избежание перекрестного загрязнения в предпочтительном варианте осуществления способа согласно настоящему изобретению форма пипетирующего инструмента, в частности, его дозирующего наконечника, является такой, что осаждение капли суспензии на целевом планшете или другом сосуде происходит без брызг. Оказалось, что в зависимости от применяемого вида микроорганизма и, в особенности, от его способности к прилипанию, помимо выбора правильного давления в вышеупомянутом диапазоне и времени открытия клапана в вышеупомянутом диапазоне, подходящая форма пипетирующего инструмента гарантирует, что капля суспензии может осаждаться без брызг.
В соответствии с дополнительным вариантом осуществления способа идентификационная метка обеспечивается на целевом планшете и другом сосуде(сосудах) для проведения тестов на образце (например, AST), и необязательно обеспечивается идентификационная метка на пятнах для осаждения на целевом планшете. Согласно способу идентификационная метка для всех из целевого планшета и пятен для осаждения хранятся в памяти центрального управляющего компьютера вместе со свойствами суспензии со ссылкой на идентификационные данные чашки для культивирования, из которой была получена выбранная колония микроорганизмов. Способ не только может выполняться автоматически крайне эффективным образом, но также обеспечивает достижение корректной и быстрой обработки полученных результатов анализа.
В соответствии с еще одним дополнительным вариантом осуществления способа подготовленный сосуд, такой как сосуд, помогающий проведению дополнительных тестов, таких как AST, может перемещаться от местоположения, в котором пробирка инокулируется суспензией микроорганизма и другими соответствующими реактивами, ко второму местоположению, где дополнительный пипетатор пипетирует смеси из сосуда и инокулирует картридж, применяемый для проведения тестов. Такой картридж после инокуляции может располагаться роботом в удерживающей структуре, которая удерживает картридж до тех пор, пока он не извлекается инструментом для переноса картриджа. Если он доступен, инструмент для переноса картриджа подбирает или захватывает картридж из удерживающей структуры и переносит картридж к другой удерживающей структуре, находящейся в пределах инструмента для проведения тестов, такого как инструмент для проведения тестов AST.
Масс-спектрометрию, которая осуществляется на практике с помощью методов MALDI или MALDI-TOF-MS, применяют для идентификации микроорганизмов. При функционировании MALDI-TOF-MS образец колонии микроорганизмов наносят в виде пятна или осаждают на целевом планшете, который удерживается в фиксированном положении в MALDI-инструменте. Такой целевой планшет, как правило, имеет множество пятен для осаждения (например, от 24 до 384 пятен для осаждения на одном целевом планшете). Эти пятна для осаждения имеют фиксированную ориентацию относительно краев целевого планшета. Целевой планшет располагают на платформе с Х-Y координатной сеткой таким образом, чтобы полученный образец колонии микроорганизмов мог осаждаться на выбранном пятне для осаждения. Местоположение, в котором был осажден конкретный образец, указывается координатами X-Y/параметрами и хранится в памяти центрального управляющего компьютера.
Несмотря на то что он не показан в деталях на фиг. 2, целевой планшет 42 иллюстрируется как расположенный под направляющей 18 для переноса в положении, обозначенном В. Образец может переносится по направляющей 18 для переноса от чашки 3 для культивирования и/или пробирки 11 для суспензии в положение над целевым планшетом в положении В, где образец опускается для осаждения на пятно для осаждения на целевом планшете. Предполагаются другие механизмы для переноса, которые отличаются от проиллюстрированных на фиг. 1. Например, могут быть задействованы механизмы для переноса, смонтированные на основании.
Настоящее изобретение будет подробно описано ниже относительно приготовления суспензии, содержащей образец, и осаждения суспензии на пятно для осаждения на целевом планшете. В целом, колония микроорганизмов автоматически обнаруживается и выявляется на чашке для культивирования. Образец выбранной колонии микроорганизмов получают автоматизированным способом, например, с помощью инструмента для сбора, который приводится в контакт с колонией.
При осуществлении характеристики и идентификации микроорганизмов обычно множество колоний растет на чашке для культивирования. Кроме того, множество разных чашек для культивирования проходят обработку с помощью аппарата. В связи с этим, настоящим изобретением обеспечивается возможность идентификации каждой чашки для культивирования отдельно, например, посредством штрих-кода, и, кроме того, каждая колония, представляющая интерес, на одной чашке для культивирования выбирается и получает идентификационную метку. Поэтому перед автоматизированной стадией определения местоположения и выбора колонии микроорганизмов на чашке для культивирования обеспечивают чашку для культивирования, которая, как определено, содержит ряд колоний микроорганизмов. Получают первоначальное изображение чашки для культивирования. Изображение включает в себя все колонии микроорганизмов. Аппарат или устройство, работающее в сообщении с аппаратом, отображает первоначальное изображение чашки для культивирования, включающее в себя все колонии микроорганизмов, на дисплее и выбирает по меньшей мере одну колонию микроорганизмов на первоначальном изображении. Таким образом, исследователь или анализирующий специалист может выбрать колонии, представляющие интерес, исходя из полученного специального образования и знаний. В соответствии с одним вариантом осуществления графическая информация подвергается обработке, и колонии идентифицируют для сбора, исходя из технических требований. Поскольку каждая чашка для культивирования обеспечивается индивидуальной идентификационной информацией, идентифицирующей чашку для культивирования, такой как штрих-код, первоначальное изображение чашки для культивирования, включающее в себя все колонии, сохраняют, и информацию, относящуюся по меньшей мере к одной выбранной целевой колонии микроорганизмов, сохраняют (предпочтительно со ссылками на (электронном) первоначальном изображении). Вся информация и идентификационные данные чашки для культивирования хранятся в памяти центрального управляющего компьютера, что обеспечивает высокую степень точности и целостности обработки.
Таким образом, единственная возможная выполняемая в ручном режиме операция в способе и аппарате, описанных в данном документе, представляет собой действие по выбору колоний, представляющих интерес. Все из данных, относящихся к образцу, обрабатываются автоматизированным способом. Необязательно, исследователь или анализирующий специалист может вручную ввести инструкции по обработке, касающиеся обработки, которой должна подвергнуться выбранная колония микроорганизмов на чашке для культивирования. Инструкции по обработке также хранятся в памяти центрального управляющего компьютера для последующего применения. После этого выполняемого вручную действия все дальнейшие осуществляемые стадии являются автоматизированными надежным и эффективным образом.
В случае этой автоматизированной дальнейшей обработки чашка для культивирования автоматически располагается на платформе для чашки для культивирования в устройстве инструмента для сбора, содержащем визуализирующее устройство. Получают изображение чашки для культивирования, размещенной в устройстве инструмента для сбора, и вместе с идентификационными данными чашки для культивирования представляется возможным проведение сравнения этого изображения, полученного с помощью визуализирующего устройства в устройстве инструмента для сбора, с сохраненным первоначальным изображением чашки для культивирования и, таким образом, может быть получена информация относительно местоположения выбранной колонии микроорганизмов и, необязательно, относительно инструкций по обработке, касающихся процессов, которые должны быть выполнены на выбранной колонии микроорганизмов. Посредством сравнения изображения чашки для культивирования, когда она помещена в устройство инструмента для сбора, с первоначальным изображением, местоположение выбранных колоний может быть получено автоматически, например, посредством компьютеризированного сравнения изображений. Более того, каждый целевой планшет обеспечивается идентификационной меткой и, необязательно, каждое пятно для осаждения на целевом планшете имеет отдельную идентификационную метку или идентификатор местоположения. Сосуд, применяемый для AST, также несет идентификационную метку, чтобы связать результаты с правильным образцом. После сохранения идентификационной метки на целевом планшете и пятнах для осаждения вместе со свойствами суспензии со ссылкой на идентификационные данные чашки для культивирования, из которой была получена выбранная колония микроорганизмов, в памяти центрального управляющего компьютера, является возможным корректное и автоматизированное правильное связывание полученных результатов MALDI/AST с конкретной колонией микроорганизма, подвергающегося тесту.
Было обнаружено, что в случае, когда образец покрывает не более приблизительно половины одного из пятен для осаждения на целевом планшете, полученные от MALDI-инструмента результаты анализа части пятна для осаждения, которое первоначально не было покрыто образцом, неожиданно являются значительно более точными, чем полученные от MALDI-инструмента результаты анализа части пятна для осаждения, которое первоначально было покрыто образцом. Предполагается, что кристаллизация, которая происходит после того, как капля материала матрицы была наслоена на образец, покрывающий часть пятна для осаждения, обеспечивает, что часть пятна для осаждения, которая не была покрыта, также содержит количество материала образца, и что это количество является крайне подходящим для обеспечения отличных результатов анализа. Физические или химические процессы, которые являются причиной этого эффекта, на данный момент являются неясными, но, возможно, большая ясность может возникнуть, когда станут известны фундаментальные процессы, лежащие в основе MALDI.
Система и способ для приготовления образца
Теперь будет описан вариант осуществления способа согласно настоящему изобретению, в котором суспензию получают из образца колонии микроорганизмов, собранного с чашки для культивирования, вместе с вариантом осуществления системы 1000 для приготовления образца для осуществления такого способа.
На фиг. 1 изображена система 1000 для осуществления способов, описанных в данном документе. Система 1000 включает в себя корпус 1005, который обеспечивает среду для практического осуществления способов и для компонентов, которые осуществляют описанные способы. В связи с этим, компоненты распределены внутри корпуса 1005 между несколькими станциями. Слева направо, корпус обеспечивает принимающую станцию 1010, станцию 1020 для сбора, станцию 1030 для приготовления и станцию 1040 для переноса. Принимающая станция 1010 получает одну или более чашек для культивирования, которые, как предполагается, несут микроорганизмы, представляющие интерес, и автоматически подает такие чашки для культивирования на станцию 1020 для сбора. Станция 1020 для сбора автоматически выявляет колонию, представляющую интерес, и собирает образец из нее. Станция 1030 для приготовления автоматически готовит образцы для проведения тестов, таких как тесты для идентификации (ID) и тесты на чувствительность к антибиотикам (AST). Станция 1040 для переноса автоматически переносит приготовленные образцы для AST в картриджи для AST (также называемые в данном документе панелями), которые автоматически переносятся в систему для AST.
В общем способе автоматизированное устройство 8 инструмента для сбора обеспечивается для получения инструмента 6 для сбора и переноса этого инструмента к платформе 2, поддерживающей чашку 3 для культивирования, которая была помещена на такую платформу. Перед сбором представляющую интерес колонию 4 идентифицируют на чашке 3 для культивирования и определяют ее положение на ней. Инструмент 6 для сбора, получив информацию о местоположении через контроллер 30, перемещает инструмент 6 для сбора в положение над представляющей интерес колонией 4 и собирает колонию. После сбора собранный образец 19 переносится в одну или более кювет или пробирок 11 для суспензии. Дополнительно, аликвота жидкости 14 для суспензии дозируется в пробирку 11 для суспензии, что предпочтительно осуществляется до переноса собранного образца 19 колонии в пробирку 11. Инструмент 6' для сбора затем размещают таким образом, чтобы часть инструмента 6' для сбора, несущая собранный образец 19, была погружена в жидкость 14 для суспензии. Обеспечивается колебание инструмента 6' для сбора для высвобождения микроорганизмов. Прибор 20, измеряющий мутность, отслеживает мутность суспензии и обеспечивает такой информацией контроллер 30, который сопоставляет измеренную мутность с техническими требования к концентрации для тестов, которые должны быть проведены на аликвотах суспензии, таких как ID и AST. Целевые концентрации как для ID, так и для AST описаны в данном документе.
После того как суспензия достигает желаемой мутности, аликвота суспензии отбирается пипеткой из пробирки 11, и планшет 42 для проведения тестов ID инокулируется суспензией. Пипетирующий инструмент 46 затем получает еще одну аликвоту суспензии для AST. В соответствии с некоторыми вариантами осуществления суспензия может требовать дополнительного разведения жидкостью для суспензии перед отбором пипеткой суспензии для AST. После получения пипетирующий инструмент 46 затем дозирует суспензию в сосуд 82 для проведения тестов AST или другого анализа, такого как молекулярно-диагностический анализ. Такой сосуд может включать в себя реактивы, используемые для проведения таких дополнительных тестов, и штрих-код на нем может сканироваться роботом 50, захватывающим пробирки, перед дозированием.
После этого сосуд 82 переносится во второе местоположение с помощью перемещающего устройства 80. В этом положении другой пипетирующий инструмент 66 отбирает пипеткой суспензию из сосуда 82 и инокулирует картридж 90 для тестов. Этот картридж 90 может перемещаться перед инокуляцией переносящим картридж роботом 70 в удерживающую структуру блока 78 для заполнения картриджа. Блок 78 для заполнения картриджа может приводиться в движение, поворачивая картридж 90 на оптимальный угол для инокуляции. Робот для снятия крышек (не показан) может удалять крышку с картриджа 90, что необходимо для инокуляции с помощью пипетатора 60. После того как картридж 90 инокулирован, он может переноситься переносящим инструментом 2000 в инструмент 2050 для проведения тестов (см. фиг. 20). После проведения тестов система может выдать окончательный отчет об образце, в котором указываются результаты количественного анализа роста образца и результаты ID и AST.
Далее способ будет описан более конкретно в отношении системы 1000 и ее компонентов. На фиг. 2 схематически показаны станции 1020, 1030 и 1040, расположенные внутри корпуса 1005 системы 1000.
Станция 1020 для сбора содержит платформу 2 для чашки 3 для культивирования, содержащей микроорганизм 4 на слое 5 питательной среды, такой как слой агарового геля. Чашка 3 для культивирования может быть размещена на платформе 2 с помощью подвижной захватывающей лапы (не показана), которая переносит чашку 3 от принимающей станции 1010. Принимающая станция 1010 может автоматически принимать множество чашек для культивирования от другого вышерасположенного лабораторного оборудования и размещает их в виде многоярусной структуры перед подачей чашки 3 на станцию 1020.
После того как чашка 3 принимается на станции 1020 для сбора, осуществляется идентификация колонии и сбор колонии. Станция 1020 включает в себя позиционирующее устройство 8, которое содержит держатель 9 инструмента для сбора для удерживания с возможностью снятия инструмента для сбора, такого как одноразовый наконечник пипетки. Как показано, держатель 9 инструмента для сбора удерживает первый инструмент 6 для сбора. Позиционирующее устройство 8 выполнено с возможностью позиционирования первого инструмента 6 для сбора в исходном положении (показано сплошными линиями на фиг. 2) над чашкой 3 для культивирования и выполнено с возможностью автоматического опускания первого инструмента 6 для сбора к чашке 3 для культивирования и поднятия его от чашки 3 для сбора таким образом, чтобы первый инструмент 6 для сбора мог располагаться в положении (указано пунктирными линиями), в котором он контактирует с микроорганизмом 4 и собирает образец 19 микроорганизма 4. После того как первый инструмент 6 для сбора собрал образец 19 (первый инструмент для сбора с удерживаемым образцом 19 указан на фиг. 2 как 6'), позиционирующее устройство 8 поднимается и располагает первый инструмент 6' для сбора в положении «А» для переноса, расположенном над пробиркой 11 для суспензии. Позиционирующее устройство 8 предпочтительно поднимает инструмент 6' для сбора вертикально в исходное положение перед горизонтальным перемещением вдоль направляющей 18 для переноса к положению А для переноса. Это может помочь в предотвращении загрязнения слизеподобными нитями, которые могут образовываться в ходе сбора образца. Тем не менее, в других вариантах осуществления позиционирующее устройство 8 может перемещаться одновременно вертикально и горизонтально (как показано стрелками на фиг. 2) по направлению к положению А для переноса.
При сборе колоний для дальнейшего проведения тестов свойства некоторых колоний предполагают их характеристики липкости или вязкости, указанные выше. Это называется слизеподобной консистенцией, что делает сложным удаление колонии с поверхности агара. Как указано выше, после того как колонии коснулось устройство для сбора, слизеподобная нить часто образуется между устройством для сбора и колонией на поверхности агара (фиг. 15 и 16). Эту нить сложно разорвать контролируемым образом, и она создает проблемы, указанные выше в отношении возможного загрязнения других образцов и поверхностей внутри инструмента.
При сборе колоний вручную пользователь будет видеть образование нити и может произвести любое число ручных движений для устранения нити. Они включают в себя вращение устройства для сбора и/или вытирание устройства на чистой части планшета. Поскольку нить может визуально наблюдаться, пользователь будет видеть, когда нить разорвалась и будет продолжать проведение теста. Все эти меры могут сочетаться с небольшим риском перекрестного загрязнения.
В соответствии с одним вариантом осуществления автоматизированного процесса для решения проблемы присутствия слизеподобной нити нить выявляют оптически (например, камера может применяться для мониторинга и выявления таких нитей) или посредством мониторинга изменений в электрическом поле. Нить является электропроводной относительно окружающего воздуха. После того как нить выявляется, квалифицированный специалист поймет, что любое число механических устройств можно применять для того, чтобы разорвать нить. Применительно к фиг. 15, на ней иллюстрируется планшет 710 для культивирования, размещенный в автоматизированной системе 700. Планшет 710 для культивирования имеет агар 720, расположенный на нем, на котором образовалось много различных колоний 730. Наконечник 740 пипетки опускается в контакт с одной колонией, и при его удалении образуется нить 750. Применительно к фиг. 16, по мере того как наконечник 740 пипетки продолжает отдаляться от поверхности агара 720, нить 750 утончается. Движение наконечника пипетки в этой точке будет вызывать перемещение нити в другое местоположение в системе 700. Это может приводить к перекрестному загрязнению нитью в других местоположениях в системе 700.
В соответствии с одним вариантом осуществления присутствие нити выявляют посредством мониторинга электрической емкости наконечника пипетки, когда колония собрана и пипетка отдаляется от поверхности планшета для переноса собранного образца в суспензию. Нить будет приводить к разнице в заряде электрической емкости, когда инструмент для сбора перемещается обратно от образца.
Сенсоры уровня электрической емкости могут измерять широкий спектр твердых веществ, водных и органических жидкостей. Выявление электрической емкости основывается на радиочастотном сигнале, применяемом к цепи для измерения электрической емкости. Посредством мониторинга электрической емкости (пФ = пикофарады) можно выявить образование слизеподобной нити. Фиг. 17А представляет собой график электрической емкости, когда инструмент для сбора опускается и касается поверхности агара. Емкость быстро падает, когда инструмент для сбора поднимается вверх и удаляется от поверхности агара. На фиг. 17В иллюстрируется изменение в емкостном сигнале, если слизеподобная нить образуется, когда инструмент для сбора перемещается от поверхности. Электрическая емкость медленно уменьшается по мере того, как нить становится тоньше и тоньше и, в конечном итоге, рвется.
Сенсоры уровня электропроводимости используют низкий уровень напряжения между двумя сенсорами. Поскольку слизеподобная нить является электропроводимой, электропроводимость будет оставаться высокой до тех пор, пока поверхность агара соединена с инструментом для сбора слизеподобной нитью.
Нить также может быть выявлена оптически. Оптический сигнал на планшете дифрагирует под воздействием нити, которая образуется между планшетом и пипеткой. Нарушение сигнала может быть выявлено программным обеспечением и, следовательно, указывать на присутствие нити.
Любое число механических устройство можно применять для удаления нити. Предпочтительные решения являются эффективными в плане затрат и не создают аэрозолей или загрязняют другие планшеты в системе. Слизеподобное покрытие на некоторых бактериях делает сложным сбор в ручных и автоматизированных системах. Слизеподобная биопленка защищает организмы, но делает работу с ними сложной. В случае таких примеров, дополнительные автоматизированные стадии и характерные признаки обеспечиваются после сбора слизеподобного образца для устранения нити и предотвращения загрязнения системы.
В соответствии с одним вариантом осуществления нагретый под действием электрического сопротивления горячий провод или лезвие обеспечивается для срезания слизеподобной нити. Провод или лезвие нагревается до температуры, которая является достаточной для стерилизации режущего устройства, в результате чего его можно повторно применять в непрерывном режиме. Специалист в данной области техники может выбрать подходящую температуру, которая будет обеззараживать провод или лезвие, уничтожая микроорганизмы, но не будет настолько высокой, чтобы индуцировать быстрое испарение собранного образца, что может привести в результате к высвобождению аэрозоля с организмом.
Очень низкую температуру также можно применять для разрыва нити. Небольшая струя жидкого азота на наконечник пипетки после того, как нить была выявлена сенсором, сделает нить твердой, что приведет к ее разрыву. В соответствии с альтернативным вариантом осуществления режущий зонд, который является охлажденным до замерзания, можно применять для перерезания слизеподобной нити и обеспечения чистого разрыва.
В соответствии с другим вариантом осуществления вращающийся одноразовый стержень применяют для разрыва нити. Когда нить выявляется сенсорами, режущий стержень приводится в контакт с ней. В соответствии с альтернативными вариантами осуществления режущий стержень может вращаться, наматывая слизеподобную нить вокруг стержня для того, чтобы гарантировать, что нить разорвана.
В соответствии с еще одним вариантом осуществления обеспечивается устройство для ультразвуковой обработки, которое разрушает нить, когда наконечник пипетки перемещается от агарового планшета, образуя нить. Например, ультразвуковой гудок соединен с адаптером наконечника пипетки. Короткие импульсы с высокой частотой приводят к тому, что слизеподобная нить легко срезается, когда устройство для сбора отрывается от поверхности агара.
В соответствии с другим вариантом осуществления нити позволяют высохнуть, в результате чего она становится хрупкой и разрывается. Время высушивания уменьшают посредством выдувания воздуха на нить с помощью небольшого сопла, расположенного рядом с планшетом. Время высушивания контролируют для того, чтобы оно не увеличивало значительно время для любого сбора.
В соответствии с еще одним вариантом осуществления через нить пропускают сильный ток. Природное сопротивление тонкой слизеподобной нить будет приводить в результате к наибольшему сопротивлению в наиболее тонкой (наименее токопроводящей) части нити. Это повышенное сопротивление будет вызывать разрушение нити. Ток выбирают таким образом, чтобы он был достаточно сильным, чтобы он вызывал разрыв нити, но не столь сильным, чтобы он вызывал быстрое испарение, которое может приводить в результате к высвобождению аэрозоля с организмом.
После того как нить выявлена, наконечник выдвигается над поверхностью агара (3-6 мм над поверхностью). Когда нить падает на агар и наконечник продолжает двигаться, нить будет растягиваться до точки разрыва. Тем не менее, поскольку нить будет рваться над агаром, это не представляет риск перекрестного загрязнения. В соответствии с альтернативными вариантами осуществления быстрый зигзагообразный характер движения применяют для того, чтобы вызвать разрыв нити, когда наконечник меняет направление движения над агаром.
В соответствии с альтернативными вариантами осуществления наконечник продавливается в агар на планшете, где отсутствует рост. Это будет вытирать наконечник дочиста и удалять нить. В соответствии с другим вариантом осуществления наконечник пипетки перемещается вдоль поверхности агара к краю планшета. Нить может эффективно вытираться на краю планшета, и нить может устраняться.
В соответствии с еще одним вариантом осуществления небольшое вакуумное устройство возле наконечника применяют, когда выявляют слизеподобную нить. Для создания вакуума будет применяться система с НЕРА фильтром (высокоэффективный сухой воздушный фильтр) для воздействия вакуума на нить и устранения загрязнения окружающей среды.
В соответствии с альтернативными вариантами осуществления пипетку обрабатывают или покрывают муколитическим средством, которое может разрушать высокомолекулярные гликопротеины, обнаруживающиеся в слизеподобной нити. Одним примером такого средства является n-ацетил-1-цистеин.
В соответствии с еще одним вариантом осуществления маломощный лазер располагают рядом с боком планшета. Когда пипетатор покидает область планшета, наконечник пипетки движется чуть выше лазерного луча. Если нить присутствует, то слизеподобная нить будет двигаться через луч. Слизеподобная нить будет нагреваться до момента, когда нить разорвется.
В соответствии с другим вариантом осуществления, когда выявляется нить, наконечник может поворачиваться на 360 градусов. Вращение срезает слизеподобную нить. В соответствии с еще одним вариантом осуществления наконечник пипетки движется вверх и вниз, касаясь поверхности агара в том же местоположении, где происходил сбор, таким образом разрывая нить. С каждым касанием поверхности наконечник пипетки всасывает некоторый объем. Это отсоединяет слизеподобную нить и фактически втягивает большую часть или некоторую часть нити в наконечник пипетки.
Станция 1020 для сбора дополнительно содержит держатель 10 пробирки для суспензии для удерживания пробирки 11 для суспензии, которая может содержать среду 14 для суспензии. В данном варианте осуществления держатель 10 пробирки для суспензии представляет собой поворотный держатель пробирки для суспензии для вращения пробирки 11 для суспензии вокруг вертикальной оси D. Тем не менее, в соответствии с некоторыми вариантами осуществления держатель 10 для пробирки может быть стационарным. Среда 14 для суспензии, которая показана, дозируется из автоматического дозатора 12 среды для суспензии, который имеет дозирующее сопло 13 для автоматического дозирования среды 14 для суспензии в пробирку 11 для суспензии, удерживаемую в держателе 10 пробирки для суспензии. Тем не менее, в соответствии с некоторыми вариантами осуществления автоматизированный пипетатор, такой как пипетатор 40, может отдельно дозировать среду 14 для суспензии в пробирку 11.
Позиционирующее устройство 8 также включает в себя переносящее устройство 15, встроенное в него для содействия автоматическому переносу образца 19 в среду 14 для суспензии. Переносящее устройство 15 соединено с держателем 9 инструмента для сбора и сконфигурировано таким образом, чтобы обеспечивать колебание инструмента 6' для сбора в виде линейного вертикального движения в течение периода времени, который является достаточным для высвобождения образца 19 из инструмента 6' для сбора. В способе, после того как пробирка 11 для суспензии инокулирована средой 14 для суспензии, и инструмент 6' для сбора расположен в исходном положении в положении А для переноса над пробиркой 11, позиционирующее устройство 8 опускает инструмент 6' для сбора в среду 14 для суспензии. С погружением образца 19, как схематически изображено на фиг. 2, переносящее устройство 15 активируется, обеспечивая колебание инструмента 6' для сбора для того, чтобы высвободить образец 19 в среду 14 для суспензии. После этого позиционирующее устройство 8 располагает инструмент 6 для сбора в положении ожидания над пробиркой 11 для суспензии, которое может быть идентичным исходному положению. В соответствии с другими вариантами осуществления положение ожидания и исходное положение могут отличаться друг от друга.
Система 1000 также включает в себя прибор 20, измеряющий мутность, для осуществления измерений мутности среды 14 для суспензии, содержащейся в пробирке 11 для суспензии, удерживаемой в держателе 10 пробирки для суспензии. Как, в целом, известно в уровне техники, прибор, измеряющий мутность, может обеспечивать измеренные значения, которые представляют собой меру концентрации материала, в данном случае концентрацию микроорганизма, суспендированного в среде для суспензии. Как показано на фиг. 2, прибор 20, измеряющий мутность, содержит лазер 21, который передает лазерное излучение в направлении среды 14 для суспензии и через нее, и сенсор 22, который выявляет количество лазерного излучения, проходящего через среду 14 для суспензии. Предпочтительно, сенсор (не указан на фигуре) может быть размещен перпендикулярно пути лазерного излучения для выявления количества лазерного излучения, которое рассеялось суспензией.
Функционирование системы 1000 управляется контроллером 30. Контроллер 30, который схематически показан на фиг. 3, включает в себя процессор 32 и память 34. Контроллер 30 соединен с возможностью коммуникации с позиционирующим устройством 8, переносящим устройством 15, автоматическим дозатором 12 среды для суспензии и прибором 20, измеряющим мутность, для автоматического управления движением позиционирующего устройства 8, движением переносящего устройства 15, функционированием автоматического дозатора 12 среды для суспензии и функционированием прибора 20, измеряющего мутность, соответственно. Кроме того, контроллер 30 может быть напрямую соединен с возможностью коммуникации с другими частями аппарата, такими как, например, держатель 9 инструмента для сбора, лазер 21 и сенсор 22.
В варианте осуществления, изображенном на фиг. 2 и 3, контроллер 30 выполнен с возможность управления прибором 20, измеряющим мутность, в результате чего измерение мутности среды 14 для суспензии начинается перед тем, как инструмент 6' для сбора погрузится в среду 14 для суспензии. Кроме того, контроллер 30 управляет поворотным держателем 10 пробирки для суспензии для начала поворота пробирки 11 для суспензии, удерживаемой в держателе 10, перед тем, как инструмент 6' для сбора погрузится в среду 14 для суспензии, и для поддержания вращения пробирки 11 для суспензии в ходе измерения мутности среды 14 для суспензии. Контроллер 30 дополнительно управляет прибором 20, измеряющим мутность, в результате чего измерение мутности осуществляется в течение всего периода времени, в ходе которого инструмент 6' для сбора колеблется. Таким образом, прибор 20, измеряющий мутность, обеспечивает измеренное в реальном масштабе времени значение контроллеру 30, причем данное значение является показателем измеренной мутности и, следовательно, концентрации микроорганизма, в течение периода времени, в ходе которого инструмент 6' для сбора колеблется.
Как упоминалось выше, контроллер 30 содержит память 34, в которой хранится первое и второе пороговое значение. Первое пороговое значение является равным или большим, чем второе пороговое значение. Если измеренное значение мутности, обеспеченное прибором, измеряющим мутность, является равным или находится между первым и вторым пороговым значением, концентрация/количество микроорганизма в среде для суспензии является достаточным для того, чтобы обеспечить возможность дальнейшей обработки пробирки 11 для суспензии с суспензией 14. В том случае, когда измеренная мутность находится между первым и вторым пороговыми значениями, контроллер 30 обеспечивает сигнал о том, что суспензия внутри пробирки 11 для суспензии может подвергаться дальнейшей обработке. Кроме того, в этой ситуации инструмент 6 для сбора может быть удален, например, посредством перемещения позиционирующего устройства над приемным сосудом для отходов и активации держателя инструмента для сбора для высвобождения инструмента 6 для сбора в приемный сосуд для отходов.
В случае, когда конечное измеренное значение на приборе 20, измеряющем мутность, выше первого порогового значения, ранее сохраненного в памяти 34 контроллера 30, концентрация микроорганизма определяется как слишком высокая для того, чтобы обеспечить возможность дальнейшей обработки суспензии внутри пробирки 11 для суспензии. В такой ситуации контроллер 30 управляет автоматическим дозатором 12 среды для суспензии или неким другим дозатором среды, подавая дополнительное количество среды 14 для суспензии в пробирку 11 для суспензии. Это дополнительное количество среды 14 для суспензии основывается на исходном количестве среды для суспензии, конечном измеренном значении и величине первого и/или второго порогового значения, в результате чего добавление дополнительного количества среды для суспензии к среде 14 для суспензии, уже присутствующей в пробирке 11 для суспензии, будет приводить к концентрации микроорганизма в среде 14 для суспензии в пробирке 11, которая удовлетворяет требованиям для дальнейшей обработки, что может быть подтверждено с помощью дополнительного или дальнейшего измерения мутности с помощью прибора 20, измеряющего мутность.
В случае, когда конечное измеренное значение на приборе 20, измеряющем мутность, ниже второго порогового значения, что означает, что концентрация микроорганизма в среде 14 для суспензии является слишком низкой, контроллер 30 управляет позиционирующим устройством 8 таким образом, чтобы дополнительный образец 19 микроорганизма 4 был собран первым инструментом 6 для сбора с целью дополнительного концентрирования среды 14 для суспензии. В качестве альтернативы, первый инструмент 6 для сбора может быть удален, и второй инструмент для сбора может применяться для сбора такого дополнительного образца. В связи с этим, если определено, что конечное измеренное значение ниже порогового уровня, контроллер управляет первым инструментом 6 для сбора в держателе 9 инструмента для сбора в позиционирующем устройстве 8 таким образом, чтобы он опускался из исходного положения над чашкой 3 для культивирования к чашке для культивирования и приходил в контакт с микроорганизмом 4 для сбора дополнительного образца 19 микроорганизма 4. После этого, первый инструмент 6' для сбора автоматически поднимается с дополнительным образцом 19 микроорганизма 4 от чашки для культивирования в исходное положение в местоположении А для переноса над пробиркой 11 для суспензии. Затем, инструмент 6' для сбора с дополнительным образцом микроорганизма опускается в среду 14 для суспензии и колеблется переносящим устройством 15 в виде линейного вертикального движения в течение периода времени для высвобождения дополнительного образца 19 микроорганизма 4 в среду 14 для суспензии. Снова измеряют мутность во время колебания, и измеренное значения сравнивают с первым и вторым пороговым значением, хранящимся в памяти 34 контроллера 30. В этом случае контроллер 30 может быть выполнен с возможностью управления движением позиционирующего устройства 8 таким образом, чтобы первый инструмент для сбора 6, после того как дополнительный образец по меньшей мере частично удален из него, поднимался в положение ожидания, если во время колебания измеренное в реальном масштабе времени значение мутности, полученное прибором 20, измеряющим мутность, было равно или ниже, чем первое пороговое значение и равно или больше, чем второе пороговое значение.
Несмотря на то что концентрация микроорганизма в среде 14 для суспензии может быть повышена посредством нескольких последующих процедур сбора колонии, как описано в случае, когда измеренная мутность ниже порогового уровня, другие процедуры могут осуществляться вместо этого с учетом того, что измеренная концентрация определена как слишком низкая. В связи с этим, как более подробно описано ниже, несколько дозированных порций суспензии с низкой концентрацией могут осаждаться на одном и том же пятне на планшете для MALDI. Это оказывает эффект концентрирования микроорганизма 4 на планшете для MALDI, а не в среде 14 для суспензии.
Пробирки 11 для суспензии или, в качестве альтернативы, пузырьки или кюветы, которые являются особенно подходящими в аппарате согласно настоящему изобретению, имеют поперечное сечение с минимальным целевым размером, составляющим от около 2 до около 12 мм, предпочтительно около 3 мм. В этих относительно небольших пробирках для суспензии контроллер 30 может управлять автоматическим дозатором 12 среды для суспензии или другим дозатором среды таким образом, чтобы поданное исходное количество среды для суспензии составляло около 0,1-5 мл, предпочтительно менее около 1 мл.
Колебание переносящего устройства 15 управляется контроллером 30 таким образом, чтобы инструмент 6' для сбора колебался с частотой от около 5 Гц до около 250 Гц, предпочтительно около 100 Гц, с амплитудой от около 0,5 мм до около 4 мм, предпочтительно от около 2 мм до около 3 мм. Контроллер 30 выполнен с дополнительной возможностью управления колебанием переносящего устройства 15 таким образом, чтобы период времени, в течение которого инструмент 6' для сбора колеблется, составлял от около 3 секунд до около 120 секунд, предпочтительно от около 30 до около 60 секунд.
Нефелометры в автоматизированной системе и способе
Далее будут описаны различные варианты осуществления нефелометра. Следует понимать, что любой из такого описанного далее нефелометра может составлять нефелометр 20, описанный ранее. В соответствии с одним вариантом осуществления нефелометр, применяемый в автоматизированной системе 1000, может представлять собой нефелометр, описанный в предварительной заявке на патент США №62/056911, которая принадлежит тому же заявителю и включена в данный документ посредством ссылки. В соответствии с этим вариантом осуществления суспензия не подвергается воздействию колебания, когда измеряют мутность.
Еще один вариант осуществления нефелометра 100 изображен на фиг. 4А и 4В. Нефелометр 100 представляет собой нефелометр малого объема, сконструированный таким образом, чтобы вмещать одну пробирку для суспензии, иллюстрируемую в виде кюветы 110, которая имеет текучую среду 120 для суспензии, помещенную внутрь основания 101 нефелометра, как показано на фиг. 4А. Нефелометр 100 также включает в себя источник 130 света, фокусирующую линзу 170, детектор 140 бокового светорассеяния, детектор 150 проходящего света и ослабляющий светофильтр 160 (наилучшим образом показаны на фиг. 4В). Кювета 110 с образцом 120 располагается в центре нефелометра 100 и внутри основания 100 нефелометра. Источник света 130, детектор 140 рассеянного света и детектор 150 проходящего света расположены под углами 90 градусов друг относительно друга вокруг кюветы 110. Детектор 140 рассеянного света расположен в непосредственной близости к кювете 110, содержащей суспензию 120 образца, и параллельно источнику 130 падающего света. Это сводит к минимуму эффекты дифракции, рефракции и отражения в отношении рассеянного света. Детектор 150 проходящего света расположен под углом 180 градусов или напротив источника 130 света. Детектор 150 также может быть ориентирован либо перпендикулярно к падающему лучу света, либо под отличающимся углом для снижения эффектов отражения от его поверхностей. Ослабляющий светофильтр 160 расположен между кюветой 110 и детектором 150 проходящего света. В этой конфигурации суспензии образцов подвергаются обработке по отдельности внутри сосуда 110, и нефелометр 100 выявляет рассеянный и/или проходящий свет, который проходит через исследуемый образец 120 под углом.
Предполагается применение сосудов/кювет низкого объема (или микрокювет), которые предназначены для обработки относительно малых количеств суспензий биологических материалов и текучих сред для применения в сочетании с нефелометром низкого объема, такого как нефелометр 100. На фиг. 5А и 5В изображены альтернативные варианты осуществления таких кювет низкого объема. Кюветы 110, 110' отлиты из оптически прозрачного пластика с минимально скошенными сторонами 430, 440, которые имеют гладкую полировку для лучших оптических свойств, чтобы они были удобным образом ориентированы внутри нефелометра 100. Кюветы 110, 110' можно центрифугировать в виде отдельных единиц для применений с однократным использованием. Тем не менее, в соответствии с некоторыми вариантами осуществления, которые дополнительно описаны ниже, где серию кювет применяют для приготовления суспензий, кюветы 110, 110' могут быть сконфигурированы для применения с наборами в виде линейных полос для таких применений. В качестве альтернативы, кюветы 110, 110' могут быть сконфигурированы для применения с набором в виде матрицы, предназначенного для одновременной обработки множества образцов. В варианте осуществления с матрицей множество серий суспензий готовят параллельно.
Как показано, кюветы 110, 110' имеют нижнюю часть 410, которая имеет относительно малый объем по сравнению с верхней частью 400. Суспензию первоначально готовят в части 410 с малым объемом. Таким образом, суспензия сначала располагается внутри нижней части 410 кювет 110, 110'. Биологический образец, который, как предполагается, содержит целевой микроорганизм, добавляют в суспензию в текучей среде и смешивают с ней, обеспечивая суспензию 120 исследуемого образца. Мутность суспензии измеряют в нижней части 410. В связи с этим, когда кювета 110 или 110' соединена с нефелометром 100, свет, генерируемый источником 130 света, проходит через суспензию 120 образца, которая располагается внутри нижней части 410. Нефелометр 100 выявляет свет, рассеянный нижней частью 410, с помощью детекторов 140 и 150 и измеряет мутность образца в нижней части 410 кюветы, исходя из выявленного света.
Под нижней частью 410 каждой из кювет 110, 110' находится зона 420 скопления «крупных частиц», предназначенная для получения крупных частиц, которые оседают из суспензии образца, что будет оказывать отрицательное воздействие на точность измерений мутности, выполняемых нефелометром 100. В иных случаях образцы с низким объемом имеют недостаточный объем для обеспечения возможности оседания частиц-загрязнителей из части суспензии, исследуемой с помощью нефелометра. Например, свет, проходящий через суспензию с низким объемом, которая содержит примеси частиц, может не различаться для образца в суспензии и примесей и может давать на выходе неточные значения в единицах МакФарланда (т.е. значения, указывающие мутность), что вызывает неправильную обработку образца. Например, неточное значение в единицах МакФарланда может давать информацию для ошибочного разведения. Неточное значение в единицах МакФарланда также может приводить к обработке образца в последующих процессах (например, либо с помощью AST, либо MALDI), тогда как образец не подвергся бы дальнейшей обработке, если бы было известно истинное значение в единицах МакФарланда. То есть, истинное значение в единицах МакФарланда дало бы оператору информацию, что образец не подходил для MALDI или AST. Кроме того, наличие примесей в образце может препятствовать точным измерениям концентрации в исследуемом образце. По этой причине кюветы 110, 110' в соответствии с изображенными вариантами осуществления обеспечивают эту отдельную зону 420 скопления частиц, которая находится вне пути прямого света, который проходит через нижнюю часть 410. Частицы-загрязнители оседают в зоне 420 скопления и не остаются в исследуемой зоне суспензии образца, которая находится в нижней части 410. Длина ячейки нижней части находится в диапазоне около 5,5 мм, и она предназначена для обеспечения достаточной длины ячейки в случае образцов низкого объема для получения соответствующих измерений мутности. Нижняя часть предназначена для обеспечения достаточной длины ячейки после того, как суспензия исследуемого образца приготовлена, для того, чтобы свет проходил через образцы и захватывался детекторами 140 и 150. Предпочтительно, нижняя часть 410 выполнена из хорошо отполированного оптического материала или материала, имеющего близкую оптическую прозрачность, и других светопропускающих материалов, известных специалисту в данной области техники. Такие материалы обеспечивают возможность прохождения света через стенки 440 нижней части кюветы без интерференции.
Специалисту в данной области техники будет понятно, что существуют три размера со свободой выбора конструкторских решений для малообъемной части 410 кювет 110, 110'. Размеры малообъемной части 410 в значительной степени зависят от конструкторского решения. В соответствии с одним вариантом осуществления размеры малообъемной части 410 сконфигурированы для приема устройства (например, инструмента для сбора), который будет вводить образец в нижнюю часть кюветы. В качестве примера, а не ограничения, нижняя часть кюветы имеет размеры, обеспечивающие достаточное пространство для того, чтобы инструмент для сбора диаметром 3 мм мог погружаться и вращаться внутри нижней части так, что он не касается боков кюветы 110 или 110', создавая царапины и аберрации поверхности, которые будут ухудшать ее оптическую прозрачность.
Конечно, размеры нижней части 410 должны обеспечивать оптическое наблюдение за образцом. В частности, нижняя часть 410 кювет 110, 110' имеет размеры для работы с источником 130 света и детекторами 140, 150 в нефелометре 100. Таким образом, ограничения по размерам для конструкции кюветы зависят от конфигурации нефелометра 100.
Над нижней частью 410 находится верхняя часть 400, которую применяют для разведения суспензии образца, помещенной внутрь сосуда для дальнейшей обработки в последующих применениях, таких как AST. Верхняя часть 400 имеет большую ширину и длину, чем нижняя часть 410. Предпочтительно, внутренние размеры сосуда предназначены для обеспечения автоматизированного смешивания биологического образца с текучей средой для суспензии для дальнейшего разведения суспензии исследуемого образца непосредственно внутри сосуда, когда это требуется. В процессе работы конструкция кювет 110, 110' в виде сосудов, которые можно располагать рядами, обеспечивает возможность измерения в них мутности суспензии образца и, если целевая мутность не была достигнута, дополнительного разведения образца повторения измерений мутности. Такая конфигурация обеспечивает возможность разведения образца в реальном времени (т.е. когда образец подвергается оптическому исследованию). Кроме того, конструкция в виде сосудов, которые можно располагать рядами, делает возможным измерение мутности суспензий образцов с низким объемом (например, суспензий с объемом от около 200 мкл до около 500 мкл), при этом имеет преимущества большого объема для обеспечения разведения образца.
Как изображено, верхний ряд или верхняя часть 400 каждой из кювет 110, 110' имеет приблизительно квадратный или прямоугольный периметр. В принципе, геометрическая конфигурация верхней части 400 зависит от выбора конструкции. Нижний ряд или нижняя часть 410 также имеет приблизительно квадратный периметр. В связи с этим кюветы 110, 110' напоминают «телескоп» при рассмотрении от верхней части к нижней вследствие больших размеров поперечного сечения верхней части 400 по сравнению с нижней частью 410. Альтернативные формы для кювет 110, 110' также предполагаются при условии, что стенки 440 нижней части 410 расположены под углом друг относительно друга (например, кювета не является цилиндрической, эллиптической и т.д.). Было выявлено, что расположение стенок 440 нижней части 410 (т.е. части, принимаемой нефелометром) под углом друг относительно друга (по сравнению с пробиркой круглой формы) обеспечивает меньшую аберрацию оптического сигнала и лучшее смешивание исследуемого образца. Это иллюстрируется в изображенных вариантах осуществления 110, 110', в которых нижняя часть 410 имеет четыре стороны 440, которые являются перпендикулярными друг другу, таким образом определяя квадрат. Кроме того, верхняя часть 400 также имеет четыре стороны 430, которые являются перпендикулярными друг другу за исключением того, что размеры сторон 430 являются большими, чем сторон 440. Меньшая нижняя часть 410 сконфигурирована для приема основанием 101 нефелометра и/или линейным набором кювет (описано ниже). Верх каждой кюветы 110, 110' имеет отверстие 450 для приема образца и разбавителя/среды для суспензии. Боковые стенки 430 и 440 верхней и нижней частей 400, 410, соответственно, определяются плоскими поверхностями. Не вдаваясь в какую-либо конкретную теорию, полагают, что плоские поверхности сводят к минимуму дифракцию и рефракцию света, который проходит через кюветы 110, 110'. Кроме того, квадратная конфигурация кювет/сосудов 110, 110' обеспечивает возможность прохождения света через и в суспензию образца и сосуд с прямыми углами к плоской поверхности такого сосуда 110, 110'. Эта конфигурация также сводит к минимуму возможность дифракции или рефракции от источника 130 света, когда он попадает в кюветы 110, 110' и покидает их.
Предполагаются различные конфигурации кювет 110, 110'. В варианте осуществления, изображенном на фиг. 5А, верхняя часть 400 кюветы 110 сужается к нижней части 410. Углы верхней части 400, где боковые стенки 430 пересекаются, соответствуют углам нижней части 410, что можно увидеть по прямым кромкам 401). Скошенные края 401 разграничивают переход между более широкой верхней частью 400 и более узкой нижней частью 410.
В другом варианте осуществления 110', изображенном на фиг. 5В, углы верхней части 400, где пересекаются боковые стенки 430, являются смещенными относительно углов нижней части 410, где пересекаются боковые стенки 440. Такое смещение происходит на смещенных краях 402, как иллюстрируется на фиг. 5В. В одном конкретном примере, углы нижней части 410 смещены на 45 градусов относительно углов верхней части 400. Преимущественно, эта конфигурация обеспечивает размещение источника 130 света и детекторов 140, 150 на любой стороне кюветы 110', когда кювету 110' помещают внутрь основания 101 нефелометра.
Далее будут описаны способы применения нефелометра 100 и кюветы 110 для измерения мутности, которые показаны на блок-схеме с фиг. 6. Кювету 110 помещается внутрь основания 100 нефелометра либо вручную, либо автоматически. Исходную текучую среду для суспензии (не содержащая микроорганизмов) помещают внутрь кюветы 100. Объем текучей среды составляет от около 200 мкл до около 500 мкл. Предпочтительно, объем исходной текучей среды для суспензии составляет около 300 мкл. Дополнительная текучая среда может быть добавлена в кювету 110, если разведение необходимо для получения определенных значений в единицах МакФарланда. Затем биологический образец, который, как предполагается, содержит микроорганизмы, добавляют в кювету 110 и смешивают с текучей средой для суспензии с получением на выходе суспензии 120 исследуемого образца. Нефелометр 100 измеряет исходную мутность исследуемого образца 120, и значение в единицах МакФарланда записывается в память 34. Суспензию образца дополнительно разводят посредством добавления дополнительной текучей среды для суспензии, если полученные результаты исходной мутности являются слишком высокими. В соответствии с одним вариантом осуществления разведение является автоматизированным. Верхняя часть 400 кюветы 110 позволяет объему текучей среды для суспензии превышать объем нижней части 410. Нефелометр 100 измеряет мутность разведенной суспензии. После того как получают предварительно определенное значение в единицах МакФарланда, суспензию или подвергают обработке для последующего проведения тестов, или хранят, или удаляют. Суспензия может подвергаться разведению столько раз, сколько это необходимо для того, чтобы получить желаемые значения в единицах МакФарланда.
Свет от источника 130 проходит через суспензию 120 (например, исследуемого образца), расположенную внутри кюветы 110. Свет, который падает на поверхность (например, плоскую боковую стенку 440 кюветы/сосуда 110), называется в данном документе падающим светом. Свет, который рассеивается частицами суспензии 120, называется в данном документе рассеянным светом. Часть падающего света отражается поверхностью кюветы. Преломленный или проходящий свет представляет собой часть падающего света, который проходит через поверхность (например, плоскую боковую стенку 440 кюветы/сосуда 110).
При работе проходящий свет принимается детектором 150 проходящего света. В соответствии с иллюстративными вариантами осуществления детектор 150 проходящего света расположен на пути падающего света для максимального повышения выявления света, проходящего через суспензию. В случаях, когда поверхность детектора 150 является сильно отражающей, детектор 150 может быть расположен таким образом, чтобы поверхность детектора располагалась под небольшим углом (не 90 градусов) по отношению к оси светового пути. Расположение детектора 150 под углом оптимизирует выявление проходящего света без отражения света обратно в суспензию 120 или направления света в другие части нефелометра 100. Интенсивность света, собранного детектором 150, является пропорциональной мутности суспензии.
Ослабляющий светофильтр 160 располагается непосредственно напротив детектора 150 проходящего света. Фильтр снижает интенсивность света, падающего на детектор 150 на величину, которая является пропорциональной таковой у падающего луча. В соответствии с иллюстративными вариантами осуществления фильтр 160 обеспечивает возможность функционирования детектора 150 без насыщения и обеспечивает достаточный рабочий диапазон интенсивности для детектора, чтобы выявлять незначительные изменения интенсивности проходящего света.
Нефелометр 100 также измеряет количество рассеянного света. Детектор 140 рассеянного света помещают его выявляющей поверхностью параллельно пути падающего света и вдоль одной стороны кюветы 110. Порции света, которые проходят через суспензию 120 образца рассеиваются частицами в суспензии. Детектор 140 бокового светорассеяния собирает некоторую часть рассеянного света. Количество рассеянного света, которое собирает детектор 140, обеспечивает сигнал, который является пропорциональным количеству частиц в исследуемой суспензии 120. Одним способом измерения мутности суспензии 120 является обработка количества рассеянного света, собранного детектором 140 рассеянного света, посредством различных алгоритмов, хорошо известных в уровне техники. Данные, собранные от детектора 140 рассеянного света, могут быть объединены с данными, собранными от детектора 150 проходящего света, различными способами. Например, сигналы могут быть объединены физически, или со значениями от детекторов могут быть проведены математические манипуляции для их объединения некоторым образом, чтобы дополнительно повысить точность и надежность исходных сигналов. Сигналы или значения данных могут быть объединены аддитивно, субстрактивно, дифференциально и т.д. для обеспечения результирующего сигнала, который является характерным для объединенных сигналов. Такое объединение может осуществляться процессором 32. Когда сигналы от значений на детекторе объединяют таким образом, представляется возможным повысить разрешение и точность собранных данных для измерения мутности. Преимущественно, данные, собранные от двух отдельных детекторов (данные рассеяния и пропускания) могут обеспечивать более точные результаты в случае образцов малого объема. Двойное измерение является преимущественным в тех вариантах осуществления, где измерения рассеяния недостаточно. Результаты измерения и проходящего, и рассеянного света могут быть более точными вследствие ограниченной длины светового пути через малый объем образца 120.
В соответствии с иллюстративными вариантами осуществления детектор 140 рассеянного света и детектор 150 проходящего света представляют собой стандартные высокоэффективные фотодиодные детекторы. Тем не менее, также можно применять другие детекторы, имеющие аналогичные характеристики. Подходящие детекторы включают в себя те, которые функционируют в видимом диапазоне спектра от ультрафиолетового (UV) до инфракрасного (IR) излучения. Подходящие детекторы могут быть выбраны, исходя из их кривых линейной характеристики, размера, воспроизводимости результатов и способности к функционированию/выявлению в световых путях в условиях низкой освещенности и выявлению маленьких изменений в интенсивности света с измеримым разрешением. Примеры включают в себя фотодиоды, фотоумножительные трубки, лавинные детекторы, фотоэлементы, фоторезисторы, фотоэлектрические сенсоры и т.д. Такие детекторы являются коммерчески доступными, хорошо известны специалисту в данной области техники и не описываются подробно в данном документе.
В соответствии с иллюстративными вариантами осуществления источник света представляет собой светоизлучающий диод (LED), излучающий свет высокой интенсивности, или диодный лазер. Предпочтительно, частота света LED составляет около 650 нм. Предпочтительно, длина волны света на детекторе находится в пределах полосы спектра, соответствующей красному цвету (т.е. около 620-750 нм). Тем не менее, квалифицированный специалист может применять для исследования свет с разными частотами в видимой области спектра. Необязательно, фокусирующую линзу 170 (фиг. 4В) применяют для фокусирования света в узкий пучок (например, пучок, имеющий диаметр около 3 мм). Фокусирующая линза 170 расположена напротив источника 130 света. Применение фокусирующей линзы 170 концентрирует свет от источника 130 света внутри области 410 с образцом в сосуде/кювете и сводит к минимуму количество света, которое может рассеиваться из исследуемой области. Специалист в данной области техники осведомлен, что свет, который рассеивается за пределами исследуемой области (т.е. нижней части 410 кюветы 110) делает рассеяние непригодным для целей измерения мутности образца вследствие высокого фонового сигнала. Сфокусированный свет затем проходит от фокусирующей линзы 170 (не показана) в нижнюю часть 410 кюветы 110 под углом, перпендикулярным лицевой стороне кюветы 110. Перпендикулярный угол уменьшает нежелательную дифракцию и рефракцию, которая возникает, когда пучок света проходит из одной среды (например, воздуха) в другую среду (например, плоские поверхности сторон кюветы). Путь сфокусированного пучка света сохраняется, когда свет проходит через суспензию по направлению к детекторам 140 и 150. В вариантах осуществления, где источник 130 света представляет собой диодный лазер, дополнительные линзы 170 могут не требоваться для фокусирования пучка света. Это отчасти обусловлено свойствами лазера, которые обеспечивают коллимированный и сфокусированный свет для исследования суспензии. Фокусирующую линзу 170 применяют в вариантах осуществления, в которых источник 130 света представляет собой LED, и она коллимирует или фокусирует свет, если это желательно или необходимо.
На фиг. 7А и 7В иллюстрируется другой вариант осуществления нефелометра 200, в котором кюветы проходят через нефелометр сериями. Система предназначена для применения с сериями кювет (описаны ниже), которые проходят через нефелометр непрерывно. Отдельные кюветы 110 могут быть помещены непосредственно вовнутрь основания 201 нефелометра посредством помещения нижней части кюветы в канал 220, как показано на фиг. 7А. В качестве альтернативы, отдельные сосуды 110 могут быть вначале помещены внутрь линейного набора 300 сосудов, и линейный набор 300 (фиг. 8), вмещающий несколько сосудов может быть помещен внутрь нефелометра посредством прохождения через канал 220. После того как сосуды помещают внутрь основания нефелометра либо по отдельности, либо внутри линейного набора, суспензию готовят в кювете и мутность измеряют, как описано выше.
Нефелометр 200 также включает в себя источник 230 света, фокусирующую линзу 270, детектор 240 рассеянного света, детектор 250 проходящего света и ослабляющий светофильтр 260, которые описаны выше применительно к нефелометру с фиг. 4В. Кювета 110 с образцом 120 располагается в центре аппарата и внутри основания 201 нефелометра. Источник 230 света, детектор 240 рассеянного света и детектор 250 проходящего света расположены под углом 90 градусов друг относительно друга вокруг кюветы 110, как описано выше. Поверхность 240 детектора бокового светорассеяния располагается параллельно падающему пучку от источника 230 света. Расположение детектора 240 рассеянного света в непосредственной близости к исследуемому образцу 120 и параллельно источнику падающего света сводит к минимуму эффекты дифракции, рефракции и отражения в отношении рассеянного света. Детектор 250 проходящего света располагается напротив источника 230 света, и падающий свет от источника света проходит по направлению к детектору проходящего света. Детектор 250 также может располагаться либо перпендикулярно пути падающего света, либо под углом несколько градусов относительно перпендикулярного расположения для того, чтобы снизить эффекты отражения от его поверхностей. Ослабляющий светофильтр 260 расположен между кюветой 110 и детектором 250 проходящего света.
На фиг. 8 иллюстрируется набор из серии кювет/приемный сосуд для серии кювет для применения с одним вариантом осуществления аппарата согласно настоящему изобретению, такого как нефелометр 200. Этот вариант осуществления отличается от вариантов осуществления, описанных выше, в которых пробирки для суспензии вращаются для того, чтобы поместить их для измерения мутности. Набор 300 из серии кювет представляет собой полосу из серии кювет, которая движется по каналу 220 с направляющими. Источник 230 света в виде LED размещается с одной стороны канала 220 с направляющими, который направляет полосу 300. Полоса 300 находится в зацеплении с возможностью скольжения с каналами 220. Полоса 300 также может включать в себя опоры или другие структуры 530 (фиг. 9) для удобного складирования, упаковки и транспортировки. Полоса 300 продвигается через нефелометр, и лунки-кюветы 320 располагаются между источником 230 света и детекторами 240 и 250 для обработки. После завершения обработки линейная полоса 300 может быть снабжена индексом и продвигаться к следующей кювете, и обработка продолжается для последующих образцов с применением того же нефелометра. Полоса 300 кювета может храниться или удаляться, исходя из потребностей конкретного пользователя. В соответствии с этим вариантом осуществления один нефелометр предназначен для эффективной обработки многочисленных образцов без необходимости удаления отдельных кювет и замены их новыми кюветами. Линейная полоса 300 кювет может быть сконструирована с различными формами, размерами, конфигурациями кювет. Например, лунки 320 в полосе 300 могут быть сконструированы таким образом, чтобы они были более или менее глубокими, более широкими, более узкими, более длинными, более короткими и т.д. в зависимости от конструкции кюветы. Кроме того, лунки могут быть скреплены друг с другом через отдельные лунки, или они могут быть вставлены по отдельности в лунки, располагающиеся одна за другой. Помещение нескольких кювет 110' с краями 402 внутрь линейного набора 300 обеспечивает возможность более эффективного транспортирования кювет 110' через нефелометр 200, поскольку они могут обрабатываться сериями и поступают в нефелометр и подвергаются измерению без дополнительной манипуляции с ними.
В еще одном варианте осуществления серии кювет, изображенном на фиг. 9, полосы с кюветами могут укладываться в стопку и могут быть разделены либо на отдельные кюветы, либо могут представлять собой линейную полосу кювет в зависимости от конфигурации нефелометра. В изображенном варианте осуществления кюветы 500 переносятся с помощью штатива 510. Штатив 510 имеет плоскую поверхность, на которой подвешены кюветы. Плоская поверхность является рифленой (не показано) для того, чтобы обеспечить возможность разделения кювет на отдельные кюветы или полосы кювет. Кюветы, которые могут укладываться в стопку, также имеют опоры 530, как описано выше. Следует заметить, что для облегчения укладывания в стопку нижняя часть 540 кюветы 500 помещается в более широкую верхнюю часть 550.
Фиг. 10 представляет собой вид в перспективе нефелометра 590, на котором показана прорезь 575 для источника 570 света, прорезь 635 для сенсора рассеянного света и прорезь 605 для сенсора проходящего света.
Фиг. 11 представляет собой вид в разрезе нефелометра 590, на котором показан путь света, проходящего через нижнюю часть 540 кюветы 500. Источник света (570, фиг. 12) помещается в прорези 575 на одной стороне приемного сосуда 580 для кюветы в нефелометре 590. Прорезь 575 получает источник света. Сенсор 600 (фиг. 12) расположен в прорези 605 прямо напротив прорези 575, причем нижняя часть кюветы 540 расположена между ними. Нефелометр имеет крышку 620.
Фиг. 12 представляет собой вид в разрезе нефелометра 590, на котором показан путь света, рассеивающегося через нижнюю часть 540 кюветы 500. Источник 570 света (фиг. 12) находится на одной стороне приемного сосуда 580 для кюветы в нефелометре 590. Сенсор 630 (фиг. 10) расположен в прорези 635 под прямым углом к источнику 570 света, причем нижняя часть кюветы 540 расположена между ними.
Фиг. 13 представляет собой вид в разрезе нефелометра 590, на котором показан путь света, проходящего через нижнюю часть 540 кюветы 500. Источник 570 света помещается в прорези 575 на одной стороне приемного сосуда 580 для кюветы в нефелометре 590. Между сенсором 600 и кюветой 500 находится ослабляющий светофильтр 640, который располагается напротив детектора проходящего света для снижения интенсивности света до применимого уровня для того, чтобы не допустить насыщение сенсора. Прорезь 575 вмещает источник 570 света и линзу 650 для фокусирования оптического сигнала. Сенсор 600 расположен в прорези 605 прямо напротив прорези 575, причем нижняя часть кюветы 540 расположена между ними.
В соответствии с одним вариантом осуществления образец располагается внутри кюветы и подвергается обработке отдельно, когда помещается в нефелометр. После того как образец прошел обработку и были получены значения в единицах МакФарланда, кювету удаляют из нефелометра и заменяют на новую кювету. В соответствии с этим вариантом осуществления один или более нефелометров функционируют независимо. В соответствии с альтернативным вариантом осуществления нефелометр сконфигурирован для доставки последовательной серии кювет в нефелометр для измерения. Линейный канал 220 для кюветы принимает полосу 300 из отдельных лунок-кювет 320 (фиг. 4В). Полоса переносится через нефелометр, останавливаясь для того, чтобы каждая кювета подверглась оптическому исследованию для измерения, которое подробно описано в других местах в данном документе.
Способы измерения мутности согласно настоящему изобретению являются автоматизированными. Данные, собранные в результате измерений могут быть подвергнуты дополнительной обработке для получения значимых результатов. В соответствии с этими вариантами осуществления сигнал от детекторов подается на усилители сигнала. Выход усилителя сообщается со схемой аналогово-цифрового преобразователя, который выдает цифровое представление входящего сигнала, которое затем подвергается обработке с применением различных алгоритмов для определения того, является ли измеренное значение близким к целевому значению. Если измеренное значение является большим, чем целевое значение, то образец разводят, как описано выше, и повторно измеряют мутность. Такое повторное измерение может выполняться вручную оператором или автоматизировано, когда кювета переносится из нефелометра для разведения и транспортируется обратно к нефелометру для дополнительного измерения. Разработаны способы обработки сигнала в пригодный выходной сигнал с применением варьирующих разведений различных биологических и небиологических образцов и соотнесения значений в единицах МакФарланда с концентрациями суспензии. Эти данные затем применяют для получения наборов данных, которые дополнительно анализируют с применением алгоритмов, корректирующих линейность и смещение кривых данных для получения репрезентативного значения на выходе для значения мутности, и сравнивают с целевым значением. Этот процесс повторяют до тех пор, пока не получают целевую мутность, как описано в других местах в данном документе.
Система 1000 также может содержать конвейер, конечное положение у которого может образовывать платформу 2 для чашки для культивирования, или конвейер и платформу 2, которые могут быть взаимно расположены таким образом, что планшет для культивирования может транспортироваться на платформу и удаляться с платформы за счет соответствующей работы конвейера. Конвейер управляется контроллером 30 для автоматического позиционирования чашки для культивирования, содержащей микроорганизм, на платформе и ее удаления с платформы, соответственно. Стоит заметить, что в других вариантах осуществления, которые не показаны, могут применяться разные средства для автоматического позиционирования чашки для культивирования, содержащей микроорганизм, на платформе и ее удаления с платформы, соответственно. В частности, контроллер 30 выполнен с возможностью обеспечения автоматического удаления чашки для культивирования с платформы автоматическим устройством, позиционирующим и удаляющим чашку для культивирования, только после обеспечения сигнала о том, что пробирка для суспензии с суспензией может быть удалена из держателя пробирки для суспензии для дальнейшей обработки. Это гарантирует, что всегда возможно собрать дополнительный образец, если это необходимо.
Как показано на фиг. 2, аппарат 1000 согласно настоящему изобретению также может содержать автоматическое устройство, позиционирующее и удаляющее пробирку для суспензии, (не показано) для автоматического позиционирования пробирки для суспензии в держателе пробирка для суспензии и удаления пробирки для суспензии из держателя пробирки для суспензии, соответственно. Такое автоматическое устройство, позиционирующее и удаляющее пробирку для суспензии, может включать в себя средство для захвата, захватывающие пробирку 11 для суспензии с возможностью высвобождения. Кроме того, контроллер 30 может быть расположен таким образом, чтобы он был соединен с возможностью коммуникации с автоматическим устройством, позиционирующим и удаляющим пробирку для суспензии, для управления функционированием автоматического устройства, позиционирующего и удаляющего пробирку для суспензии, и для автоматического позиционирования пробирки 11 для суспензии в держателе 10 пробирки для суспензии. Контроллер 30, в частности, выполнен с возможностью автоматического удаления пробирки для суспензии из держателя пробирки для суспензии автоматическим устройством, позиционирующим и удаляющим пробирку для суспензии, только после того, как был обеспечен сигнал о том, что пробирка для суспензии с суспензией может быть удалена из держателя пробирки для суспензии для дальнейшей обработки. Автоматическое устройство, позиционирующее и удаляющее пробирку для суспензии, может перемещаться по рельсу 18 независимо от перемещения позиционирующего устройства 8. Пробирки 11 для суспензии могут быть извлечены, и пробирки для суспензии со средой для суспензии, содержащие достаточную концентрацию микроорганизма, могут перемещаться к оборудованию для дальнейшей обработки, такому как инкубатор. Стоит заметить, что система с несколькими направляющими может направлять устройство, позиционирующее и удаляющее пробирку для суспензии, и позиционирующее устройство 8 в различные места, в которых присутствуют разные компоненты, или могут осуществляться процессы.
Приготовленную таким образом суспензию образца применяют для осуществления характеристики или идентификации микроорганизмов с применением MALDI и, необязательно, применяют для другого анализа, такого как AST. В случае идентификации микроорганизмов с применением MALDI аликвоту суспензии образца получают с применением пипетирующего инструмента или инструмента для сбора, и эту аликвоту переносят на целевой планшет 42. Капля может быть получена с применением такого инструмента 46, который удерживается средствами 49 для захвата пипетатора 40 и затем автоматически опускается в суспензию в положении А. Когда этот инструмент 46 поднимается от суспензии, капля суспензии будет прилипать к наконечнику этого инструмента 46, который может переноситься по направляющей в положение В, в котором инструмент 46 с суспензией опускается до тех пор, пока капля суспензии не контактирует с пятном 44 для осаждения на целевом планшете 42. По меньшей мере часть суспензии будет оставаться на пятне 44 для осаждения после того, как инструмент 46 поднялся от целевого планшета 42. В качестве альтернативы, инструмент 6 для сбора, можно применять для сбора количества суспензии 14 из пробирки 11 для суспензии, переноса этого количества в положение В и осаждения капли суспензии на целевом планшете 42. После того как капля суспензии отложилась на целевом планшете 42, и, в частности, когда этой капле позволили высохнуть, раствор матрицы для MALDI автоматически наслаивают на количество или часть образца, осажденного на целевом планшете 42. Для осуществления таких тестов или другого анализа вторую каплю суспензии образца можно получить аналогичным образом, и такая капля может быть автоматически перенесена и осаждена, например, на тестовой чашке для культивирования, которая переносится далее автоматизированным способом для осуществления теста на чувствительность или другого дополнительного анализа.
В соответствии с одним вариантом осуществления раствор матрицы диспергируют на целевой планшет 42 в многочисленные пятна. Это улучшает пропускную способность и снижает затраты на расходные материалы, такие как пипетки и т.п. В соответствии с этим вариантом осуществления достаточный объем раствора матрицы (то есть, раствора матрицы для многих целевых пятен) всасывается в пипетку, и эта пипетка применяется для последовательного дозирования на многие пятна. Как правило, дозирование малых объемов текучей среды в диапазоне от 1 мкл до 20 мкл требует прикосновения капли текучей среды к поверхности для того, чтобы обеспечить дозирование, позволяя поверхностному натяжению текучей среды, контактирующей с целевым планшетом, стянуть каплю с наконечника 46 пипетки. В ходе процесса «снятия капли при прикосновении» на поверхность целевого планшета наконечник пипетки 46 может непреднамеренно коснуться поверхности целевого планшета 42. Если наконечник 46 пипетки касается целевого планшета 42, существует риск переноса материала образца от одного пятна на целевом планшете к следующему, что приводит в результате к перекрестному загрязнению. С целью предотвращения перекрестного загрязнения выявление жидкости с использованием электрической емкости интегрировано в пипетатор 40, чтобы выявить, когда капля касается целевого планшета 42. Выявление жидкости с использованием электрической емкости применяют для получения нескольких дозированных порций из одного объема раствора матрицы в одной пипетке в соответствии со следующими стадиями.
Вначале подбирается новый наконечник пипетки. После этого сухой наконечник перемещается к целевому планшету 42, и планшет касается наконечника пипетки 42 в положении, не являющемся целевым, для того, чтобы определить и записать точное положение по вертикали (Z) в местоположении области взаимодействия целевого планшета с наконечником.
Затем достаточный объема раствора матрицы всасывается из контейнера с матричным реактивом. Контейнер имеет мембрану для предотвращения испарения раствора матрицы. После всасывания раствора матрицы и удаления наконечника из контейнера с матрицей мембрана стирает любую оставшуюся текучую среду матрицы, которой мог быть покрыт наконечник 46. Это гарантирует, что капля будет образовываться на конце наконечника, когда раствор матрицы дозируется из наконечника, а не стекает с бока наконечника 46.
Наконечник 46 пипетки затем перемещается к целевому планшету 42. Капля образуется на конце наконечника 46. Наконечник 46 движется вниз в вертикальном (Z) направлении до тех пор, пока капля не касается пятна 44 на целевом планшете. Когда капля касается планшета, схема, оценивающая электрическую емкость, генерирует сигнал, который указывает на то, что капля касается планшета 42. Вертикальное (Z) положение наконечника 46 проверяется для того, чтобы подтвердить, что наконечник 46 не касается планшета 42. Если наконечник 46 не касается планшета 42, процесс многократного дозирования продолжается. Если наконечник 46 касается планшета 42, наконечник 46 будет сброшен в емкость с отходами, будет получен новый наконечник и сухой наконечник будет перемещаться в положение, чтобы прикоснуться к целевому планшету, для получения новых данных о положении места прикосновения наконечника к целевому планшету по вертикали (Z), и процесс продолжается до тех пор, пока все целевые пятна 44 на планшете 42 не будут инокулированы раствором матрицы.
Получение образца для ID и AST из одной и той же суспензии
Приготовление суспензии из материала, собранного из одной колонии, которая применяется как для MALDI, так и для проведения AST тестов, описано в патенте США №9180448, который принадлежит тому же правообладателю, что данная заявка, и включен посредством ссылки во всей своей полноте. Раскрытие данного документа может относиться к аппарату для приготовления образца (называемому далее в данном документе инструмент для приготовления образца или станция для приготовления образца), такому как «Phoenix АР», или к системе для AST, такой как BD Phoenix™ , или относится к системе для масс-спектрометрии, такой как MALDI, но следует понимать, что значение этих терминов не ограничивается аппаратом, имеющим эти торговые названия, но может включать в себя аппарат, имеющий практически подобные функциональные возможности. Аппарат, имеющий практически подобные функциональные характеристики, могут включать в себя системы для ID/AST Vitek (bioMerieux) и MicroScan (Siemens Healthcare).
В соответствии с одним вариантом осуществления аппарат, описанный в данном документе, объединяет возможности идентификации микробов MALDI инструмента с AST и возможности обработки данных у лабораторного анализа или системы для обработки, такой как системы Phoenix, Phoenix АР, ВАСТЕС или EpiCenter.
Как описано выше, суспензию готовят из микроорганизмов, собранных с приготовленного планшета 3 или взятых из пузырька с культурой клеток крови. В соответствии с одним вариантом осуществления пробирки 11 для суспензии инокулируют сверху микроорганизмом 4. Пробирки 11 преимущественно применяют в качестве источника как для ID, так и для AST. Это гарантирует, что не только образец от одного и того же пациента, но также от одного и того же изолята подвергают тестам ID и AST.
Готовят суспензию с концентрацией, подходящей для MALDI. Суспензии, подходящие для MALDI, как правило, имеют значения в единицах МакФарланда около 2. Автоматизированная система применяется для инокуляции пробирки 11 для суспензии инструментом 6 для сбора, мониторинга мутности и обработки суспензии для обеспечения суспензии с целевой мутностью. Автоматизированные процессы для обеспечения суспензий с целевой мутностью подробно описаны в данном документе. Суспензию затем можно применять для инокуляции планшета 42 для MALDI, как описано выше. Как указано выше, система 1000 посредством применения машиночитаемых обозначений и кодов связывает чашку 3 для культивирования с пробиркой 11 для суспензии и планшетом 42 для MALDI. В соответствии с одним вариантом осуществления аппарат сканирует штрих-код на планшете 42 для MALDI и записывает ID планшета на RFID-метку на штативе для пробирки для суспензии. Система 1000 с применением автоматизированного пипетатора 40 автоматически добавляет реактивы для MALDI (например, муравьиную кислоту, матрицу и т.д.) для приготовления суспензии, дозируемой на планшет 42 для MALDI для анализа, который описан в данном документе.
Система 1000, применяющая автоматический пипетатор 40 или дозирующее сопло 30, затем дозирует дополнительный раствор (например, деионизированную воду) в пробирку 11, и нефелометр 20 отслеживает мутность для обеспечения суспензии с мутностью, подходящей для AST или другого диагностического теста (например, проведения тестов с помощью молекулярных методов). Автоматизированная система и способ для обеспечения суспензии с целевой мутностью подробно описана в данном документе, и их описание не повторяется. В случае AST целевая мутность составляет около 0,5 единицы МакФарланда и, как правило, не менее около 0,25 единицы МакФарланда. Пипетатор 40 затем переносит аликвоту к пробирке 82 для AST. RFID-метка на штативе с исследуемой пробиркой обновляется с результатом коррекции.
Пробирка 82 для AST, которая показана на фиг. 2, удерживается устройством 80 для перемещения пробирки для AST. Устройство 80 для перемещения пробирки для AST представляет собой робот, обычно расположенный под основанием 7 системы, и он сконфигурирован для перемещения по меньшей мере в двух измерениях, которые иллюстрируются вертикальной и горизонтальной стрелками на фиг. 2. В частности, устройство 80 для перемещения пробирки для AST сконфигурировано для того, чтобы удерживать, как например, с помощью приемного сосуда или захватывающего устройства, пробирку 82 для AST и перемещать пробирку 82 для AST под основанием 7, а также перемещать пробирку 82 для AST между заранее обозначенными положениями, находящимися у станции 1030 для приготовления и станции 1040 для переноса, соответственно. В связи с этим, основание 7 может иметь отверстия, через которые устройство 80 для перемещения может поднимать и опускать пробирку 82 для AST в этих заранее обозначенных положениях. Конечно, также предполагается, что подвешенный робот 50, захватывающий пробирку, может перемещать пробирку 82 для AST между станцией 1030 для приготовления и станцией 1040 для переноса из подвешенного положения над основанием 7, а не из-под основания 7.
Пробирка 82 для AST может храниться внутри станции 1040. Перед переносом аликвоты в пробирку 82 для AST, робот 50, захватывающий пробирку, захватывает пробирку 82 для AST с помощью средств 59 для захвата и перемещает пробирку 82 из положения, где она хранилась, к сканеру штрих-кодов для того, чтобы выполнить регистрацию пробирки 82 контроллером 30. После этого захватывающий робот 50 передает пробирку 82 перемещающему роботу 80. Робот 80 затем переносит пробирку 82 под основанием 7 в положение С, находящееся на станции 1030 для приготовления, где пробирка 82 по меньшей мере частично поднимается над основанием. Пипетатор 40 затем отбирает аликвоту разведенной суспензии из пробирки 11, перемещается в положение С, а затем инокулирует пробирку 82 для AST аликвотой в положении С. Устройство 80, перемещающее пробирку, затем возвращает пробирку 82' с суспензией в ней назад на станцию 1040 для переноса, как изображено на фиг. 2.
В то время как на станции 1040 другой пипетатор 60 отбирает аликвоту суспензии из пробирки 82' для AST. Перед отбором этой аликвоты робот 70 для переноса картриджа захватывает пустой картридж 90 для AST с помощью средств 79 для захвата и переносит картридж 90 из положения, где он хранился, к картридж блоку 78 для заполнения картриджа, который включает в себя удерживающую картридж структуру для удерживания картриджа 90. Блок 78 может быть подвижным для того, чтобы поворачивать картридж 90 из вертикальной конфигурации в наклоненную конфигурацию, как показано, для упрощения инокуляции. Устройство для удаления крышки (не показано) также может удалять крышку, которая закрывает картридж 90 до инокуляции. Пипетатор 60 затем автоматически инокулирует картридж 90 для AST разведенной суспензией. И пробирка 82 с суспензией для AST, и картридж 90 для AST несут коды, что позволяет связать суспензию, подвергающуюся AST анализу, с собранным материалом, из которого была приготовлена суспензия. Аппарат имеет систему управления данными, которая связывает картриджи с суспензией, применяемой для инокуляции картриджа 90. Система 1000 считывает ID планшета для MALDI и положения на планшете для каждой суспензии и устанавливает необходимые связи с собранной колонией с идентифицированного планшета для культивирования 3 с суспензией, приготовленной из нее, и планшетом 42 для MALDI и положениями на планшете 42, инокулированном соответствующей суспензией, и пробиркой 82 с суспензией для AST и картриджем 90 для AST, инокулированным суспензией для AST. Обеспечивается автоматизация для инокуляции картриджа для AST и для переноса инокулированного картриджа в инструмент для проведения тестов, который осуществляет AST на инокулированном картридже. Ниже описан иллюстративный инструмент для переноса картриджа для автоматического перемещения инокулированного картриджа 90 в инструмент для проведения тестов AST и удаления тестируемого картриджа из него.
Подготовка планшета для MALDI с применением методики наслаивания
В соответствии с одним вариантом осуществления настоящего изобретения суспензия автоматически осаждается на планшете для MALDI 42 с применением способа с дозированием/наслаиванием. Этот способ описан в предварительной заявке на патент США №62/038509, поданной 18 августа 2014 года и озаглавленной «Способ подготовки образца для MALDI», которая принадлежит тому же заявителю, что и данная заявка, и которая была подана как международная заявка PCT/US 21015/45506, опубликованная как WO 2016028684. Предварительная заявка на патент США №62/038509 и международная заявка PCT/US 21015/45506 включены в данный документ посредством ссылки во всей своей полноте.
В способе с дозированием/наслаиванием раствора, описанном в данном документе, суспензия бактерий, которая будет дозирована, сначала оценивается для определения ее мутности, как описано в других местах в данном документе.
Суспензию бактерий образуют, как описано в других местах в данном документе. Способ с наслаиванием на дозированный раствор требует, как подразумевается его названием, образования двух или более слоев раствора для идентификации с помощью MALDI. Выбранный объем образца дозируют на планшет 42 для MALDI и сушат. Затем по меньшей мере вторую аликвоту суспензии дозируют (предпочтительно, такой же объем) на высушенную суспензию. Дозирование выполняют с применением автоматизированных способов, описанных выше. Вторую дозированную аликвоту сушат. Необязательно, большее число слоев суспензии могут быть осаждены и высушены. После того как окончательный слой из двух или более слоев высыхает, образец подвергают обработке для MALDI (например, посредством добавления муравьиной кислоты и последующего нанесения матрицы на образец, как описано в данном документе). Образец затем оценивают с помощью MALDI. Было определено, что способ с дозированием/наслаиванием раствора обеспечивает приемлемые результаты MALDI для жидких образцов со значениями мутности в единицах МакФарланда значительно меньше 2,0 как для грамположительных, так и для грамотрицательных бактерий.
Например, в соответствии с одним вариантом осуществления, если жидкая суспензия бактерий (приготовленная из бактериальной колонии, собранной с агарового планшета и суспендированной в воде (с классом чистоты, соответствующим применению в масс-спектрометрии), как указано выше, имеет значение 0,5 в единицах МакФарланда, такое значение значительно ниже значения 2,0 в единицах МакФарланда, которое указывает на то, что подготовку образца с дозированием/наслоением раствора следует применять для подготовки этого образца для MALDI.
После определения применения дозирования/наслаивания раствора для подготовки образца для MALDI выбирают количество суспензии на слой. В вышеприведенном примере с образцом, имеющим значение 0,5 в единицах МакФарланда, выбирают объем на слой, составляющий по меньшей мере около 3 мкл, но не превышающий около 4 мкл. Число слоев определяется значением мутности и объемом образца. После того как объем слоя выбран и осажден на планшете для MALDI, образец сушат. Точные условия сушки зависят от выбора конструкции и выбираются для обеспечения быстрого высыхания при сохранении целостности образца для MALDI исследования. Подходящие условия сушки легко определяются специалистом в данной области техники. Например, стадии высушивания могут осуществляться либо при температуре окружающей среды, либо при помощи горячего планшета (иллюстративно, от около 40°С до около 45°С). После высушивания второй слой суспензии осаждают на первый слой. Второй слой имеет такой же объем, что и первый слой. Если необходимо, дополнительные слои добавляют и сушат. Поскольку способ с наслаиванием требует дополнительного времени и ресурсов, количество слоев ограничено таким количеством, которое необходимо для получения точных результатов от MALDI.
После осаждения образца с дозированием/наслаиванием раствора целевую лунку с образцом подвергают обработке с применением типичной процедуры MALDI (добавление 70% муравьиной кислоты и матрицы).
Было определено, что процесс подготовки образца для MALDI зависит от ряда факторов, но наиболее существенно от: i) концентрации микроорганизмов в суспензии; ii) объема суспензии и iii) количества процедур дозирования, если применяются. Концентрация микробов отражается в мутности образца. В общих чертах, чем выше мутность, тем выше концентрация микробов.
Мутность измеряется с помощью нефелометрии, как описано в других местах в данном документе. После того как мутность суспензии оценивается, как описано выше, принимается решение о том, как заниматься подготовкой образца для MALDI. Такое определение выполняют посредством оценки информации о мутности и объеме образца. В соответствии с этими вариантами осуществления информация об образце вводится в базу данных. База данных (заранее запрограммированная информацией, касающейся подготовки образца, наиболее подходящей для конкретного образца) выдает рекомендованный способ подготовки образца для MALDI.
В автоматизированной системе процессор контролирует протокол подготовки к MALDI в зависимости от информации, которую процессор получает в отношении образца. Процессор в системе сравнивает измеренную мутность с предварительно определенным пороговым уровнем мутности, как описано в данном документе. Если процессор определяет, что мутность образца находится в пределах предварительно определенного диапазона значений мутности, то процессор обеспечивает инструкции по переносу предварительно определенного объема разведенного образца в планшет 42 для MALDI. Автоматизированная система готовит образец для MALDI (т.е. добавление муравьиной кислоты для фиксации образца с последующим нанесением раствора матрицы для MALDI на образец перед MALDI, как описано в других местах в данном документе) на основании инструкций от процессора. Если процессор определяет, что мутность выше предварительно определенного диапазона, процессор обеспечивает инструкции по подготовке образца для MALDI с применением объема, который меньше типичного объема (т.е. если 0,5 мкл обычно осаждается на планшете 42 для MALDI, вместо этого только 0,25 мкл осаждается на планшете 42 для MALDI в случае образцов с высокой мутностью). Если процессор определяет, что мутность ниже предварительно определенного диапазона, образец осаждается слоями на планшете 42 для MALDI с высушиванием образца между процедурами осаждения. Как указано выше, поскольку способ и аппарат, описанные в данном документе, представляют собой полностью автоматизированные варианты осуществления, система применяет вышеописанный автоматический пипетатор, описанный в данном документе, для дозирования суспензии на планшете 42 для MALDI на основании инструкций от процессора.
На фиг. 14 иллюстрируется схема технологического процесса для автоматизированного процесса с несколькими процедурами дозирования суспензии на планшет 42 для MALDI. Суспензия готовится автоматически, и ее мутность оценивается, как описано в других местах в данном документе. Если измеренная мутность находится в пределах предварительно определенного диапазона, аликвота с предварительно определенным объемом осаждается на планшете для MALDI. Если измеренная мутность выше, чем предварительно определенный диапазон, то меньший объем образца осаждается на планшете 42 для MALDI. Если измеренная мутность меньше, чем предварительно определенный диапазон, то применяется вышеописанный протокол подготовки образца с применением нескольких процедур дозирования с высушиванием между процедурами дозирования.
В соответствии с одним иллюстративным вариантом осуществления получают образец, и готовят суспензию. Измеряют мутность. Если мутность (в единицах МакФарланда) составляет от около 2 до около 6, около 3 мкл осаждается на планшете 42 для MALDI. Если мутность образца выше, чем около 6 мкл, то количество образца, который осаждается на планшете 42 для MALDI, уменьшается до около 1 мкл. Если мутность образца составляет меньше чем около 2, но находится в диапазоне от около 1 до около 2, то около 3 мкл образца осаждают на планшет 42 для MALDI, высушивают и второй 3 мкл образец осаждают и высушивают. Если мутность образца составляет от около 0,5 до около 1, то три «слоя» суспензии, около 3 мкл каждый, осаждают и высушивают. Если мутность образца составляет от около 0,25 до около 0,5, то 4 «слоя» суспензии (3 мкл каждый) осаждают и высушивают.
После того как образец осажден и высушен, образцы подвергают обработке для MALDI, как описано в других местах в данном документе.
Каждая пробирка для суспензии содержит уникальную идентификационную метку, которая хранится вместе со свойствами суспензии со ссылкой на идентификационные данные чашки для культивирования, из которой была получена выбранная колония микроорганизмов, в памяти центрального управляющего компьютера с целью, среди прочего, корректного и быстрого связывания ссылкой полученных результатов анализа с чашкой для культивирования и колонией, имеющими отношение к результатам.
В соответствии с дополнительными вариантами осуществления система имеет предварительно определенный диапазон мутности, в котором не будут требоваться разведения либо для MALDI, либо для AST. Если мутность находится в пределах этого предварительно определенного диапазона (например, от около 0,5 до около 2 единиц МакФарланда), то суспензию можно применять для инокуляции планшета 42 для MALDI с применением способа наслаивания, как описано выше (если концентрация суспензии не является достаточно высокой для того, чтобы проводить одну процедуру дозирования). В соответствии с этим вариантом осуществления объем суспензии, инокулированной в пробирку для суспензии, также варьирует в зависимости от измеренной мутности. Например, если значение в единицах МакФарланда для суспензии составляет 0,5, то объем, составляющий 25 мкл, инокулируют в пробирку для суспензии. В случае тех же технических требований, если нефелометр измеряет 1 единицу МакФарланда у суспензии, то будут применяться только 12,5 мкл такой суспензии. Обе процедуры дозирования доставляют около одинаковое количество микроорганизмов в пробирку 11 для суспензии, но объем суспензии с мутностью 0,5 единицы МакФарланда в два раза превышает объем суспензии с мутностью 1 единица МакФарланда. Таким образом, существует обратно пропорциональная зависимость между значением в единицах МакФарланда у суспензии и объемом суспензии, инокулируемой в пробирку 82 для AST. Чем выше значение в единицах МакФарланда, тем меньше объем суспензии, которую инокулируют в пробирку 11 для суспензии. В случае AST это обусловлено тем, что количество микроорганизма, инокулированного в пробирку 11, а не его объем определяет, является ли дозированное количество достаточным. Если нефелометр 20 определяет, что суспензия находится в пределах предварительно определенного диапазона, информация сообщается контроллеру 30, который затем определяет, должно ли дозирование на планшет 42 для MALDI выполняться с помощью способа наслаивания, или же одно дозирование является достаточным. Контроллер 30 также будет определять объем суспензии, подлежащий дозированию в пробирку 82 для AST с учетом справочной таблицы, которая будет определять дозируемое количество в зависимости от измеренной мутности.
Инокуляция картриджа для AST описана в патенте США №6096272 за авторством Clark и соавт., который включен в данный документ посредством ссылки. На практике суспензию инокулируют в текучую среду с инокулятом для AST, которая затем переносится в картридж 90 для проведения тестов с применением автоматизированных механизмов для переноса текучей среды, описанных выше. Картриджи 90 для AST наклоняют таким образом, чтобы порты для инокуляции находились сверху для заполнения (см. фиг. 25). Каждая лунка в картридже 90 для AST инокулируется текучей средой с инокулятом для AST. Инокулят стекает вниз по картриджу для AST змейкой, заполняя лунки по мере того как фронт жидкости продвигается к подушке с абсорбентом. Каждая лунка имеет отверстие для вытеснения воздуха, позволяющее жидкости заполнить лунку. Каждая лунка имеет резко очерченное круговое кольцо для отделения соответствующего количества жидкости от избытка и для изоляции каждой лунки от жидкости в соседних лунках 31. Подушка абсорбирует избыточную жидкость.
Как показано на фиг. 2, количество суспензии может быть взято из суспензии в пробирке для суспензии с помощью пипетирующего инструмента 46, который может автоматически удерживаться и позиционироваться средствами 49 для захвата (функционирующими в качестве держателя пипетирующего инструмента). Пипетатор 40 выполнен с возможностью позиционирования пипетирующего инструмента 46 в исходном положении над пробиркой 11 для суспензии и для автоматического опускания пипетирующего инструмента 46 в суспензию и поднятия его из суспензии, а также для позиционирования пипетирующего инструмента 46 в положении В для переноса над планшетом 42 для MALDI, соответственно. Когда пипетирующий инструмент 46 опускается в суспензию в пробирке 11 для суспензии, пипетирующий инструмент 46 функционирует способом, который, по сути, известен (например, с применением пониженного давления), для сбора количества суспензии. После этого пипетирующий инструмент с количеством суспензии поднимается в положение для переноса. Для удерживания количества пипетирующий инструмент содержит камеру, в которой может создаваться давление, закрытую управляемым клапаном. Пипетирующий инструмент 46 автоматически переносится в положение В над одним из пятен 44 для осаждения в целевом планшете 42. В этом положении пипетирующий инструмент 46 опускается на заранее определенное расстояние над целевым планшетом 42, после чего в камере создается давление в диапазоне около от 0,5 бара до 1,1 бара. Клапан затем открывается в течение такого периода времени, чтобы капля суспензии с объемом в диапазоне около 0,5-3,0 мкл осаждалась на пятне 44 для осаждения, в частности, покрывая не более приблизительно половины одного из пятен для осаждения на целевом планшете 42. После того как капля отложилась, пипетирующий инструмент 46 поднимается от целевого планшета 42 и может переноситься в положение, в котором он может удаляться или подвергаться очистке для повторного использования.
На фиг. 19 показана технологическая схема, сравнивающая временные рамки автоматизированного процесса с фиг. 18 с временными рамками сравнимого процесса, осуществляемого вручную. Показано, что выполняемый вручную процесс занимает до 48 часов и требует 18-24 часового периода инкубирования, только после которого планшет оценивается в отношении роста. В отличие от этого, поскольку автоматизированный процесс может выявлять даже относительно слабый контраст между колониями (по сравнению с фоном и друг с другом), только 12-18 часов инкубирования необходимы перед тем, как образец может быть идентифицирован и подготовлен для проведения дальнейших тестов (например, AST, MALDI).
Дополнительные аспекты ранее описанных вариантов осуществления описаны ниже. Пользовательский интерфейс, который описан ранее, обеспечивает пользователя изображение планшета для культивирования. Пользователь может взаимодействовать с интерфейсом для сбора колоний, представляющих интерес, с планшета.
Когда пользователь выбирает колонию, аппарат обеспечивает пользователю выбор пункта меню для выбора одного из MALDI, AST или обоих эти методов для обработки образца. Исходя из размера инструмента для сбора (т.е. пипетки, описанной в других местах в данном документе), аппарат обеспечивает допустимый сбор, чтобы гарантировать, что колония собрана в обозначенной области. Место сбора затем захватывается как мишень, и колонии собираются. В соответствии с одним вариантом осуществления диаметр допустимой области для сбора составляет 5 мм. С инструментом для сбора, имеющим диаметр 3 мм, это расстояние гарантирует, что будет собираться область с диаметром 1 мм в допустимой зоне для сбора. Данные о выборе обработки направляются на контроллер для обеспечения возможности отслеживания обработки образца.
Общий вид системы на фиг. 1-3, иллюстрирует места подготовки для идентификации (MALDI-TOF) и AST (чувствительность к антибиотикам) и сенсорный экран 1006 с пользовательским интерфейсом. На фиг. 2 иллюстрируется чашка 3 с колониями 4 на ней, которые определены для сбора, перемещающаяся к станции 1020 для сбора в системе. Чашка 3 выравнивается для сбора колонии, как ранее описано в данном документе. Чашка 3 затем сканируется для возможности отслеживания.
Крышка чашки затем удаляется и инструмент 6 для сбора в виде пипетки перемещается в положение над выбранными колониями 4. Позиционирующее устройство 8 перемещает инструмент 6 для сбора из положения для сбора в положение А для инокуляции, в котором колонии помещаются в пробирку 11 для суспензии 11, как описано ранее. Пробирки или кюветы описаны ранее в данном документе. Пипетка 6 приносит образец в пробирку 11, которая имеет жидкость для суспензии, уже присутствующую в ней. Относительное количество суспензии контролируется для того, чтобы суспензия соответствовала предварительно определенным стандартам МакФарланда, как описано выше в данном документе.
Также как и образцы, суспензии и т.д. могут отслеживаться в ходе обработки в способе и аппарате, описанном в данном документе, как и расходные материалы в аппарате и способе, отслеживаемые с помощью штрих-кода. Аппарат будет обеспечивать полностью автоматизированный контроль запасов расходных материалов внутри аппарата.
Когда суспензия осаждается на целевом планшете 42 для MALDI, она может располагаться слоями, как описано в других местах в данном документе. Высушивание образца и экстракция с помощью муравьиной кислоты также описаны ранее. Осаждение на пятна для MALDI на целевом планшете 42 с последующим осаждением раствора матрицы является автоматизированным, как описано выше.
После того как аликвоту для MALDI получают из суспензии, суспензию дополнительно применяют для инокуляции пробирок 82 для проведения тестов AST. В соответствии с одним вариантом осуществления для инокуляции пробирки для AST применяется пипетка 46 большего размера, чем для сбора колонии. В соответствии с одним вариантом осуществления пипетки объемом 50 мкл применяют для сбора колоний, и наконечники пипетки объемом 1 мм применяют для приготовления суспензии для AST. Целевая мутность для AST в соответствии с одним вариантом осуществления составляет 0,5 единицы МакФарланда (McF). Пробирки для AST с бульоном для AST в них извлекаются из штатива. В соответствии с одним вариантом осуществления пробирки с бульоном также содержат Alamar Blue (Alamar Biosciences, Сакраменто, Калифорния). Alamar Blue представляет собой колориметрический индикатор окислительно-восстановительных процессов, который меняет цвет с темно-синего на ярко розовый в присутствии метаболически активных растущих организмов. Применение Alamar Blue в анализах чувствительности является хорошо известным специалисту в данной области техники и не описывается подробно в данном документе. Пробирка 82 для AST сканируется как одна иллюстрация возможности отслеживания расходных материалов, реактивов и образец в системе. Крышка удаляется с пробирки с бульоном для AST с применением устройства для снятия крышки, и крышка затем утилизируется, после чего пробирка 82 с бульоном для AST переносится в положение, в котором инокулируется панель 90 для AST. Положение для инокуляции иллюстрируется на фиг. 2. На фиг. 2 иллюстрируется автоматический пипетатор 60, применяемый для инокуляции панели 90 для AST бульоном для AST во флаконе слева. Краситель обеспечивается для изменения цвета бульона. На фиг. 2 иллюстрируется пипетка 46, которая применяется для инокуляции пробирки для AST суспензией с мутностью 0,5 McF. На фиг. 2 иллюстрируется, что пипетка 46 применяется для смешивания суспензии в пробирке 82 для AST посредством повторяющегося всасывания и выливания раствора.
На фиг. 2 иллюстрируется автоматизация обеспечения панели 90 для AST (еще одного расходного материала) для инокуляции. На фиг. 2 также иллюстрируется инокуляция панели 90 для AST. Повторное накрытие крышкой панели 90 для AST также является автоматизированным. Таким образом, на фиг. 2, иллюстрируется то, как аппарат обеспечивает интегрированный процесс и технологическую схему для подготовки образца как для ID, так и для AST. Система 1000 может быть сконфигурирована в виде модулей, осуществляющих только одно из идентификации (MALDI-TOF), чувствительности к антибиотикам (AST) или оба из этих методов. Предполагается, что аппарат, описанный в данном документе, может быть интегрирован с большими системами, такими как Work Cell Automation от Total Lab Automation.
Перенос картриджа
Сама система 1000 может применяться совместно с другими лабораторными системами/инструментами для того, чтобы способствовать полной автоматизации подготовки образца и проведения тестов образца. Как показано на фиг. 20, система 1000 может использоваться совместно с автоматизированным инструментом 2000 для переноса картриджа и одним или более инструментами 2050a-d для проведения тестов с картриджем. Как описано ранее, система 1000 может автоматически готовить картриджи 90 для AST для тестирования. В соответствии с изображенным вариантом осуществления инструмент для переноса картриджа 2000 является специально сконфигурированным для транспортировки таких подготовленных картриджей 90 для AST из системы 1000 к одному из нескольких инструментов 2050a-d для проведения тестов с картриджем для AST.
Картридж 90 для AST, который показан на фиг. 21, 25 и 26, может представлять собой любой картридж, доступный для проведения тестов анализируемого материала/инокулята. Например, картридж 90 может представлять собой любой картридж для проведения тестов на чувствительность к антибиотикам, такой как панель для ID/AST BD Phoenix™ (Becton, Dickinson, and Co., Франклин Лейке, Нью-Джерси). Вне зависимости от того, какой картридж применяется, такой картридж 90 обычно включает в себя впускное отверстие 95 для инокуляции внутреннего пространства картриджа 90 с анализируемого материала, который может включать в себя суспензию микробов или культуру клеток крови, например. Такое впускное отверстие 95 может быть закрыто съемной крышкой или мембраной 99. Например, система 1000 может включать в себя устройство для накрытия крышкой/снятия крышки (не показано) на станции 1040 для переноса, которое снимает крышку и повторно надевает съемную крышку 99.
Как иллюстрируется на фиг. 21, контроллер 30 связан с системой 1000 (как ранее описано применительно к фиг. 3), инструментом 2000 для переноса картриджа и инструментами 2050 для проведения тестов с картриджем. Контроллер 30 координирует и управляет каждой из этих систем/инструментов 1000, 2000, 2050a-d для осуществления подготовки картриджа, переноса картридж и проведения тестов с образцом. В связи с этим, контроллер 30 сконфигурирован для выполнения определенных задач в зависимости от типа загрузки и выгрузки инструмента 2050 для проведения тестов с картриджем. Например, контроллер 30 может быть сконфигурирован для обеспечения возможности ручного и/или автоматического распределения/переноса картриджа 90 от системы 1000 для приготовления к инструменту 2050 для проведения тестов с картриджем, ручной и/или автоматической загрузки инструмента 2050 для проведения тестов и ручного и/или автоматического удаления картриджа 90 из инструмента 2050 для проведения тестов, который затем может вручную или автоматически переноситься к хранилищу 2006 или емкость 2004 для отходов. Контроллер 30 может иметь форму изображенного настольного компьютера, встроенного в панель с сенсорным экраном, такую как панель 1006, изображенную на фиг. 1, или может иметь какую-либо другую форму, которая является известной в уровне техники. В качестве альтернативы, можно применять несколько контроллеров. Например, контроллер 30 может быть соединен с инструментом 1000 и инструментом 2000 для переноса картриджа, в то время как другой контроллер (не показан) может быть отдельно соединен с инструментом 2050 для проведения тестов. Такие контроллеры могут сообщаться друг с другом для координации переноса картриджа.
Инструмент для переноса картриджа
Инструмент 2000 для переноса картриджа 2000, который наилучшим образом показан на фиг. 20, может представлять собой робот с перемещением по нескольким координатным осям, который включает в себя штангу 2010 для движения по оси z, штангу 2012 для движения по оси х, вращающийся элемент 2014, захватывающий узел 2015 для картриджа и вакуумный насос 2002. Захватывающий узел 2015 для картриджа соединен с вращающимся элементом 2014, который может вращать захватывающий узел 2015 для картриджа для того, чтобы обращать систему 1000 в одной ориентации и чтобы обращать инструменты 2050a-d для проведения тестов в другой ориентации. В связи с этим, вращающийся элемент 2014 может вращать захватывающий узел для картриджа по меньшей мере на 180 градусов относительно оси z. Вращающийся элемент 2014 и захватывающий узел 2015 для картриджа может быть соединен со штангой 2012 для движения по оси х, который сам соединен со штангой 2010 для движения по оси z. Штанга 2010 для движения по оси z может перемещать захватывающий узел 2015 для картриджа в вертикальном направлении для того, чтобы обеспечивать доступ любого из инструментов 2050a-d для проведения тестов, которые изображены расположенными друг над другом в вертикальной системе размещения. Кроме того, штанга 2012 для движения по оси х может перемещать захватывающий узел 2015 для картриджа по оси х между системой 1000 и инструментами 2050a-d.
На фиг. 22-24 изображен захватывающий узел 2015 для картриджа, который обычно включает в себя подвижную штангу 2030, опорную штангу 2038 и захватывающий планшет/элемент 2020. Подвижная штанга 2030 является подвешенной относительно опорной штанги 2038 и может двигаться относительно опорной штанги 2038 вдоль ее оси, как например, с помощью реечно-шестереночного механизма. Подвижная штанга 2030 включает в себя криволинейную верхнюю поверхность 2034, которая наилучшим образом показана на фиг. 23. Захватывающий планшет 2020 соединен с возможностью поворота с подвижной штангой 2030, смежной с криволинейной верхней поверхностью 2034, и поворачивается относительно оси соединительного элемента 2036, который соединяет эти два элемента. Криволинейная верхняя поверхность 2034 помогает направлять и поддерживать захватывающий планшет 2020, когда он поворачивается между первым положением и вторым положением.
Функция поворота захватывающего планшета 2020 относительно оси поворота дополнительно реализуется посредством применения торсионной пружины 2035, которая изображена на фиг. 23. Торсионная пружина 2035 обернута вокруг соединительного элемента 2036, который соединяет захватывающий планшет 2020 с подвижной штангой 2030. Таким образом, когда сила прикладывается к захватывающему планшету 2020, и захватывающий планшет 2020 поворачивается из первого положения во второе положение, напряжение в торсионной пружине 2035 возрастает. Когда напряжение возрастает, потенциальная энергия в торсионной пружине 2035 повышается, в результате чего она отклоняется к первому положению. Таким образом, потенциальная энергия пружины 2035 в изображенной конфигурации является наиболее низкой, когда захватывающий планшет 2020 наклоняется назад в первое положение или положение в нерабочем состоянии, в результате чего его поверхность 2026, контактирующая с картриджем, является наклоненной относительно вертикальной оси, что наилучшим образом показано на фиг. 23. В первом положении поверхность 2026, контактирующая с картриджем, предпочтительно находится под углом около 30 градусов относительно вертикальной оси. Тем не менее, предполагается, что угол захватывающего планшета 2020 может быть больше или меньше, чем 30 градусов, когда он находится в положении в нерабочем состоянии.
Сила, прикладываемая к нижнему концу планшета 2020, может вызывать перемещение захватывающего планшета 2020 ко второму положению или положению для переноса (не показано) из положения в нерабочем состоянии. Когда он находится во втором положении, пружина 2035 находится под напряжением, в результате чего, когда сила перестает воздействовать на нижнюю часть планшета 2020, планшет возвращается в положение в нерабочем состоянии. Во втором положении поверхность 2026, контактирующая с картриджем, у захватывающего планшета располагается под углом, который отличается от угла в первом положении. Например, захватывающий планшет 2020 ориентирован таким образом, что поверхность 2026, контактирующая с картриджем, предпочтительно расположена практически вертикально во втором положении. Тем не менее, второе положение может находиться практически под любым углом в диапазоне поворота из первого положения, и оно обычно находится под любым углом, при котором картридж 2020 приводится в контакт по всей плоскости с противоположной поверхностью 2072. Противоположная поверхность 2072, которая показана на фиг. 22, представляет собой поверхность удерживающей структуры 2070 для картриджа, которая получает картридж 2070 от захватывающего узла 2015 или передает картридж 90 к захватывающему узлу 2020. Такая удерживающая структура 2070 для картриджа может располагаться в инструментах 2050 для проведения тестов, а также в инструменте 1000. В качестве альтернативы, удерживающая структура для картриджа может представлять собой поднос, такой как поднос 2040, показанный на фиг. 26. Таким образом, как описано, захватывающий планшет 2020 может поворачиваться между положением в нерабочем состоянии и положением для переноса. Захватывающий планшет 2020 для картриджа обладает способностью к повороту, что позволяет захватывающему планшету 2020 захватывать, извлекать, перемещать и высвобождать объекты, такие как картридж 90 для AST.
Поверхность 2026, контактирующая с картриджем, адаптирована для захвата картриджа 90 при контакте с ним. В одном примере захват достигается посредством применения давления воздуха ниже атмосферного на поверхности 2026, контактирующей с картриджем, у захватывающего планшета 2020. Для создания давления воздуха ниже атмосферного чашечная присоска 2028 вмонтирована в поверхность 2026, контактирующую с картриджем, планшета (см. фиг. 24) и соединена с пневматическим трубопроводом 2037, проходящим через отверстие в планшете 2026, который обеспечивает пониженное давление, создаваемое вакуумным насосом 2002 (см. фиг. 20).
В способе применения захватывающий планшет 2020 продвигается к первой удерживающей структуре 2070 для картриджа, которая может располагаться в системе 1000, с помощью движущей штанги 2030, в то время как захватывающий планшет 2020 находится в первом положении (см. фиг. 22). Таким образом, нижний край захватывающего планшета 2020 достигает картриджа 90 и контактирует с картриджем 90 первым перед любой другой частью захватывающего планшета 2020. Продвижение захватывающего планшета 2020 к картриджу 90 таким образом помогает захватывающему планшету 2020 сопряженно зацепляться с картриджем 90 и выдвигать картридж 90 из держателя 2070 картриджа. Когда захватывающий планшет 2020 контактирует с картриджем 90, движущая штанга 2030 продолжает продвижение, что прикладывает силу к торсионной пружине и вызывает поворот захватывающего планшета 2020 из первого положения ко второму положению. Второе положение достигается, когда поверхность 2026, контактирующая с картриджем, захватывающего планшета 2020 находится почти вровень с неподвижной противоположной поверхностью 2072, которая удерживает картридж 90. Во втором положении поверхность 2026, контактирующая с картриджем, также обычно находится вровень с поверхностью 92 картриджа (см. фиг. 25) таким образом, что давление вакуума прижимает картридж 90 к захватывающему планшету 2020 и удерживает захватывающий планшет 2020 на нем.
После этого, когда картридж 90 прикрепляется к захватывающему планшету 2020, захватывающий узел 2015 перемещается от удерживающей структуры 2070 для картриджа, что удаляет силу, удерживающую планшет 2020 во втором положении, что вызывает возвращение захватывающего планшета 2020 и картриджа 90 в первое положение под действием отклонения пружины 2036. Это облегчает удаление картриджа 90 из удерживающей структуры 2070 для картриджа. Кроме того, движущая штанга 2030 движется вдоль опорной штанги 2038 в направлении от удерживающей структуры 2070 для картриджа таким образом, что амортизирующая поверхность 2039 (см. фиг. 24) на опорной штанге 2038 отталкивает верхнюю поверхность картриджа 90, удерживаемого захватывающим планшетом 2020. Это приводит к повороту захватывающего планшета 2020 назад во второе положение таким образом, что картридж 90 ориентируется практически в вертикальной ориентации. Это обеспечивает освобождение от удерживающей картридж структуры 2070 для захватывающего узла 2015, который вращается вращающимся элементом 2014, в результате чего картридж 90 может транспортироваться к другой удерживающей картридж структуре 2070 для его приема.
Таким образом, вращающийся элемент 2014 вращает захватывающий узел по направлению ко второй удерживающей картридж структуре 2070, которая может располагаться внутри инструмента 2050 для проведения тестов. Вращение таким образом обеспечивает возможность направления захватывающего планшета 2020 ко второй удерживающей структуре 2070 для картриджа. Когда она выравнивается со второй удерживающей структурой 2070 для картриджа, движущая штанга 2030 продвигается к удерживающей структуре 2070, которая отцепляет амортизирующую поверхность 2039 от картриджа, тем самым прекращая воздействие силы, удерживающей картридж 90 и захватывающий планшет 2020 во втором положении. Это вызывает перемещение картриджа 90 и планшета 2020 к первому положению, когда они продвигаются ко второй удерживающей структуре 2070. В связи с этим, нижний конец картриджа 90 принимается вначале второй удерживающей структурой 2070 для картриджа. По мере того как движущая штанга 2030 продвигается далее, сопротивление, обеспечиваемое второй удерживающей структурой 2070 для картриджа, помогает повернуть картридж 90 ко второму положению таким образом, чтобы он обычно находился вровень с принимающей поверхностью 2072 удерживающей структуры 2070. В этот момент картридж 90 принимается удерживающей структурой 2070, и вакуум отключается, позволяя захватывающему планшету 90 отдаляться и возвращаться в первое положение.
Предполагаются альтернативные признаки захватывающего узла 2015 для картриджа. Например, в соответствии с другим вариантом осуществления функция поворота захватывающего планшета 2020 обеспечивается посредством применения пружины сжатия (не показана). Пружина сжатия расположена между захватывающим планшетом 2020 и нижней поверхностью 2032 движущей штанги 2030. В первом положении пружина сжатия имеет относительно низкую потенциальную энергию. Когда захватывающий планшет поворачивается 2020 от первого положения ко второму положению, пружина сжимается, и потенциальная энергия в пружине возрастает. В варианте пружина сжатия является предварительно нагруженной достаточной силой сжатия для обеспечения того, чтобы захватывающий планшет 2020 не подвергался наклону в каком-либо направлении перед установлением контакта с удерживающей структурой 2070 для картриджа. Сжатие в пружине служит для удерживания захватывающего планшета 2020 в положении, когда штанга 2030 перемещает планшет 2020 от одного местоположения к другому.
В соответствии с еще одним вариантом осуществления функция поворота захватывающего планшета 2020 реализуется посредством применения пружины растяжения (не показана). Как и в случае вышеописанной пружины сжатия, пружина растяжения расположена между захватывающим планшетом 2020 и штангой 2030, однако в этом случае пружина располагается над верхней поверхностью 2034 штанги. Это гарантирует, что растяжение в пружине возрастает, когда захватывающий планшет 2020 перемещается от первого положения ко второму положению, запасая больше энергии к последнему. В варианте, подобном таковому для пружины сжатия выше, пружина растяжения может быть предварительно нагружена при растяжении в первом положении.
В соответствии с еще одним вариантом осуществления эластомерный элемент (не показан) применяется для обеспечения функции поворота. Эластомерный элемент представляет собой структуру, которая деформирует из состояния равновесия, когда захватывающий планшет 2020 поворачивается из первого положения ко второму положению, а затем возвращается к своему первоначальному размеру, когда захватывающий планшет возвращается в первое положение. Эластомерный элемент предпочтительно является выполненным из материала, имеющего достаточно низкий модуль Юнга, чтобы обеспечивать возможность эластичной деформации в ответ на силу сопротивления, создаваемую при контакте с неподвижным инструментом, когда захватывающий планшет устанавливает контакт и придвигается к удерживающей структуре 2070 для картриджа.
В соответствии с еще одним вариантом осуществления волнистая пружина (не показана) обеспечивает функцию поворота. Расположение и функционирование волнистой пружины относительно узла 2015, является подобным таковому у пружины сжатия, и в ином случае она будет располагаться и прикрепляться способом, известным среднему специалисту в данной области техники.
В соответствии с другими вариантами осуществления пассивные средства, отличные от описанных выше, можно применять для обеспечения функции поворота. Пассивные формы управления являются хорошо известными среднему специалисту в данной области техники и не описываются подробно в данном документе.
В соответствии с дополнительными вариантами осуществления активные средства можно применять для обеспечения функции поворота. Примеры активного управления включают в себя линейный исполнительный механизм, такой как электрический или пневматический исполнительный механизм, поршень, такой как электрический или пневматический поршень, шарико-винтовая передача и реечная передача. Также предполагаются любые другие активные формы управления, известные среднему специалисту в данной области техники.
В соответствии с любым из вышеуказанных вариантов осуществления захватывающий планшет 2020 может иметь размер, соответствующий размеру конкретного картриджа. Таким образом, размеры захватывающего планшета не ограничиваются конкретной шириной или длиной. Кроме того, толщина захватывающего планшета в значительной степени зависит от выбранной конструкции при условии, что она является достаточной с учетом материала, применяемого для того, чтобы выдерживать ожидаемые целевые нагрузки.
Кроме того, в любом из вышеуказанных вариантов осуществления поверхность 2026, контактирующая с картриджем, у захватывающего планшета 2020 может быть приспособлена для того, чтобы находиться вровень с картриджами разных типов, форм и размеров. Например, контактирующая поверхность 2026 может характеризоваться вогнутой или выпуклой формой по длине захватывающего планшета 2020.
В соответствии с любым из вышеуказанных вариантов осуществления захватывающий планшет 2020 может быть приспособлен к включению ряда поверхностных элементов для захвата конкретного объекта. Например, картридж 90, иллюстрируемый на фиг. 25, включает в себя ряд элементов, которые могут применяться для захвата захватывающим планшетом 2020. Они включают в себя щель 93 в промежутке возле центральной области картриджа, проходящую, в целом, в продольном направлении, вогнутую область 94 в центральной части верхней поверхности картриджа 90, выступы 96 на верхнем и нижнем краях картриджа 90, среди прочего.
Чтобы соответствовать этим элементам картриджа контактирующая поверхность 2026 может включать выступы, имеющие форму и расположение, которые подходят к соответствующим элементам на картридже 90. Захватывающий планшет 2020 также может иметь структуру, распространяющуюся между выступами 26, чтобы вызывать силы, действующие в противоположных направлениях на продольной оси картриджа 90. Иными словами, захватывающий планшет 2020 может быть адаптирован для того, чтобы зацепляться за выступы 96. Также предполагается, что другая структура захватывающего планшета, такая как структура с расположенными друг напротив друга пальцевидными элементами, может быть адаптирована для зажатия на сторонах 98 картриджа 90.
В соответствии с любым из вышеуказанных вариантов осуществления поверхность 2026 захватывающего планшета 2020 может включать в себя структуру для поддержания выравнивания объекта, который был захвачен и извлечен. В одном примере улучшенное выравнивание извлеченных картриджей 90 относительно захватывающего планшета 2020 обеспечивается с помощью рельсов 2027, которые проходят параллельно боковым сторонам планшета 2020 и могут продолжаться от верха до низа планшета, как иллюстрируется на фиг. 24.
Автоматизированная загрузка картриджей с образцом для AST
На фиг. 27A-27D изображен иллюстративный инструмент 2050 для проведения тестов с картриджем. В частности, изображенный инструмент 2050 для проведения тестов с картриджем представляет собой инструмент для AST. Тем не менее следует понимать, что принципы, описанные в данном документе, можно применять к любому лабораторному инструменту, в котором является желательным автоматический ввод и удаление картриджа с образцом.
Инструмент 2050 для проведения тестов с картриджем обычно включает в себя корпус 2052, определяющий полость в нем, а также первую или ручную дверь 2060 и вторую или автоматическую дверь 2066 для доступа к указанной полости. Корпус 2052 может включать в себя держатель 2054 картриджа, расположенный в полости, который включает в себя множество приемных сосудов или удерживающих структур 2073 для картриджа для приема отдельных картриджей 90. Держатель 2054 картриджа и приемные сосуды могут передвигаться внутри полости посредством активации исполнительного механизма 2078 для приемного сосуда (например, мотор и ремень) таким образом, чтобы каждый приемный сосуд был обращен к проему двери для получения или удаления картриджа 90. В одном примере держатель 2054 картриджа может представлять собой барабан с множеством приемных сосудов 2073, который может вращаться вокруг оси.
Как показано на фиг. 27А, первая дверь 2060 обычно расположена на первой стороне (считающейся лицевой в этом варианте осуществления) инструмента 2050 и функционирует в ручном режиме. Первая дверь 2060 прикреплена на шарнирах к корпусу 2052 и включает в себя механическую или магнитную защелку 2064 или задвижку, которая может закрываться с помощью автоматического закрывающего механизма 2074 во время функционирования инструмента для проведения тестов для предотвращения открывания первой двери 2060. В соответствии с альтернативным вариантом осуществления вместо того, чтобы находиться в шарнирном соединении с корпусом 2052, первая дверь 2060 может быть прикреплена с возможностью скольжения к направляющей, что позволяет открывать и закрывать дверь посредством сдвигания.
Как показано на фиг. 27B-27D, вторая дверь 2066 обычно расположена на второй стороне (считающейся задней в этом варианте осуществления) инструмента 2050 и функционирует автоматически. Вторая дверь 2066 расположена с возможностью скольжения по направляющей 2056, позволяющей двери 2066 скользить из стороны в сторону, и связана с линейным исполнительным механизмом или исполнительным механизмом 2076 привода двери, таким как ходовой винт, реечная передача, пневматический цилиндр/поршень, моторизованный переводить на электрический привод линейный исполнительный механизм или какое-нибудь другое механическое или электромеханическое устройство. Такой исполнительный механизм 2076 привода двери открывает и закрывает дверь 2064. Направляющая 2056 по меньшей мере частично определяет ширину проема второй двери. Вторая дверь 2066 может открывать для воздействия один или более держателей 2054 картриджа. Предполагаются две независимо функционирующие задние автоматические двери, обеспечивающие гибкость, открывая для воздействия только верхний держатель картриджа или нижний держатель картриджа. Это может требовать применения дополнительных направляющих 2056 и исполнительного механизма 2076 привода двери.
Инструмент 2050 для проведения тестов может включать в себя дополнительные двери, такие как третья и четвертая дверь, которые могут располагаться по бокам инструмента 2050 и могут функционировать в ручном режиме или автоматически. Кроме того, вторая дверь 2066, в качестве альтернативы, может быть расположена на стороне инструмента 2050, смежной с передней стороной, где располагается первый дверь 2060. В соответствии с другим вариантом осуществления автоматическая дверь 2066 может быть интегрирована в открываемую вручную дверь 2060 таким образом, чтобы во время функционирования в ручном режиме автоматическая дверь 2066 двигалась с ручной дверью 2060, а во время автоматического функционирования открывалась и закрывалась только автоматическая дверь 2066, тогда как ручная дверь 2060 оставалась закрытой. Конечно, также предполагается, что инструмент 2050 для проведения тестов может иметь только одну дверь, которая может функционировать автоматически.
Как упоминалось выше, инструмент 2050 для проведения тестов может быть встроен в виде составляющей подсистемы в более крупную систему, которая включает в себя инструмент для переноса 2000 и систему 1000 для приготовления, и которая управляется контроллером 30. В связи с этим, инструмент 2050 для проведения тестов может включать в себя элементы 2070, которые сообщаются с контроллером 30 и/или функционируют под его управлением. Такие элементы иллюстрируются на фиг. 28А, и обычно включают в себя, без ограничения, пользовательский интерфейс 2071 для ввода данных, интерфейс 2072 дисплея, а также запирающий механизм 2074, исполнительный механизм 2076 привода двери и исполнительный механизм 2078 приемного сосуда.
Как показано на фиг. 27А, корпус 2052 также может включать в себя пользовательский интерфейс 2071 для ввода данных и интерфейс 2072 дисплея. Пользовательский интерфейс 2071 может представлять собой одну или более нажимных кнопок или сенсорный экран, который позволяет пользователю/оператору вводить команду или запрос, как например, запрос о переходе к ручному управлению или инструкцию. Например, когда инструмент 2050 для проведения тестов находится в автоматическом режиме, контроллер 30 обеспечивает работу исполнительного механизма 2076 привода двери для второй двери 2066, в то время как контроллер 30 обеспечивает работу запирающего механизма 2074 для того, чтобы держать первую дверь 2060 закрытой. Интерфейс 2071 для ввода данных может быть сконфигурирован таким образом, чтобы пользователь мог отменить автоматический режим, в результате чего, когда цикл проведения теста завершен, контроллер 30 отключает исполнительный механизм 2076 привода двери и обеспечивает работу запирающего механизма 2074, позволяя пользователю открывать первую дверь 2060. Кроме того, ввод данных пользователем 2071 может быть сконфигурирован таким образом, чтобы позволить пользователю дополнительно определять, будут ли картриджи 90 загружаться или выгружаться. Контроллер 30 может затем определять, является ли соответствующий картридж 90 или приемный сосуд надлежащим образом обращенными к проему ручной двери.
Интерфейс 2072 дисплея может представлять собой экран или светодиодный индикатор. Когда пользователь запрашивает ручной режим через пользовательский интерфейс 2071 для ввода данных, интерфейс 2072 дисплея может выдавать предупреждение о том, что проведение теста в инструменте 2050 все еще происходит, и что первая дверь 2060 не может быть открыта до тех пор, пока проведение теста не будет завершено. Интерфейс 2072 дисплея также может показывать сообщение или указывать, когда первая дверь 2060 является незапертой, для осуществления ручной загрузки или выгрузки. Интерфейс 2072 дисплея также может показывать активный в настоящее время режим инструмента 2050, является ли он ручным или автоматическим.
Кроме того, инструмент 2000 для переноса картриджа может включать в себя элементы 2041, которые сообщаются с контроллером 30 и/или функционируют под его управлением. Такие элементы иллюстрируются на фиг. 28В и обычно включают в себя, без ограничения, захватывающее устройство 2020 для картриджа, исполнительный механизм(механизмы) 2030 для перемещения картриджа и сенсор(сенсоры) 2048 положения картриджа.
Как упоминалось выше, захватывающий планшет 2020 для картриджа может включать в себя вакуумное отверстие/чашечную присоску 2028, которые обеспечивают присасывание для прикрепления и высвобождения картриджа 90. Работа вакуумного насоса 2002 в режиме включено/выключено, которая обеспечивает такое присасывание, может управляться контроллером 30.
Исполнительные механизмы 2030 для перемещения картриджа управляют перемещением инструмента 2000 для переноса. Таким образом, в случае, когда инструмент 2000 для переноса представляет собой работа, который описан ранее, исполнительные механизмы 2030 для переноса обеспечивают роботу движение с автоматической степенью свободы для того, чтобы перемещать захватывающий планшет 2020 и любой картридж 90, прикрепленный к нему. Контроллер 30 управляет исполнительными механизмами 2030, управляя перемещением картриджа, а также деактивируя исполнительные механизмы 2030, когда включается ручной режим работы инструмента 2050 для проведения тестов.
Для того чтобы определить положение и ориентацию картриджа 90, прикрепленного к захватывающему планшету 2020, инструмент для переноса 2000 может включать в себя сенсоры 2048 положения картриджа, которые сообщаются с контроллером 30 через контур с обратной связью, чтобы помочь в непосредственном переносе картриджа.
Как упоминалось выше, контроллер 30 может представлять собой настольный компьютер или некое другое вычислительное устройство и может включать в себя интерфейс 2072 дисплея и пользовательский интерфейс 2071, такой как клавиатура и мышь. Кроме того, как изображено на фиг. 28С, архитектура вычислительной системы контроллера обычно включает в себя процессор 32 и память 34. Как показано на фиг. 28С, контроллер может включать в себя интерфейс 36 подсистемы.
Интерфейс 36 подсистемы, который может включать в себя внешнюю шину, связывает контроллер 30 с системой 1000 для приготовления, инструментом 2000 для переноса картриджа и инструментом 2050 для проведения тестов с картриджем. В частности, инструкции и данные передаются между контроллером 30 и компонентами 2070 через интерфейс 36 подсистемы.
Память/хранилище 34 данных может включать в себя RAM, ROM, флеш-память и т.п. Память 34 включает в себя инструкции 37 управления процессором и хранящиеся данные 38. Инструкции 37 управления процессором включают в себя инструкции, связанные с функционированием запирающего механизма 2074, исполнительного механизма 2076 привода двери, исполнительного механизма 2078 приемного сосуда и интерфейса 2071 для ввода данных, например. Хранящиеся данные 38 могут включать в себя идентификационные данные картриджа (такие как информация в виде штрих-кода или серийные номера), соответствующие идентификационные данные приемного сосуда и информацию о временных рамках, времени начала теста и продолжительности теста.
В соответствии с одним вариантом осуществления способа, включающего автоматизированный перенос картриджа, картридж 90 автоматически загружается в устройство 2050 для проведения тестов и автоматически выгружается из него. В соответствии с таким вариантом осуществления система 1000 для подготовки готовит картридж 90 для AST посредством инокуляции картриджа 90 образцом, как подробно описано выше. Более конкретно, картридж 90 инокулируется автоматически с помощью одного или более роботов, которые могут удалять крышку 99 впускного отверстия (например, колпачок) в картридже 90. Пипетатор 60 дозирует анализируемый материал в картридж 90. В качестве альтернативы, впускное отверстие может быть покрыто мембраной, в таком случае робот может использовать иглу для инокуляции внутренней части картриджа 90 через мембрану. После этого картридж 90 может быть помещен в местоположение для сбора, как например, в пределах станции 1040 для переноса, и система 1000 для подготовки уведомляет контроллер 30, что картридж 90 готов для теста, и время на подготовку завершается.
После этого, контроллер 30 обеспечивает функционирование инструмента 2000 для переноса картриджа, который собирает инокулированный картридж 90 и переносит его с помощью захватывающего узла 2015 и перемещает исполнительные механизмы 2030 к предварительно определенному приемному сосуду для таких картриджей в инструменте 2050 для проведения тестов. Контроллер 30 также активирует исполнительный механизм 2076 привода двери и исполнительный механизм 2078 приемного сосуда, который открывает вторую дверь 2066 инструмента 2050 для проведения тестов и перемещает приемный сосуд, выравнивая его с проемом второй двери с применением обратной связи от сенсоров 2048 положения картриджа.
Инструмент 2000 для переноса затем помещает картридж 90 в приемный сосуд и сообщает местоположение конкретного картриджа/приемного сосуда (которое связано с другими специфическими особенностями картриджа) контроллеру 30. Инструмент 2000 для переноса затем отбирает дополнительные картриджи 90 согласно инструкциям от контроллера 30. Как правило, приемные сосуды будут полностью заняты картриджами 90 перед проведением теста. Когда держатель 2054 картриджа заполнен картриджами 90 согласно инструкциям от контроллера 30, это распознается инструментом 2000 для переноса или инструментом 2050 для проведения тестов и сообщается контроллеру 30. Контроллер 30 затем обеспечивает функционирование исполнительного механизма 2078 приемного сосуда, который направляет дополнительные пустые приемные сосуды к проему второй двери. После того как все из приемных сосудов заполняются картриджами согласно инструкциям от контроллера 30, контроллер 30 активирует исполнительный механизм 2076 привода двери, который закрывает вторую дверь 2066 и направляет инструменту 2050 для проведения тестов инструкции для начала теста, который в этом варианте осуществления представляет собой AST.
После того как проведение теста завершено, контроллер 30 активирует исполнительный механизм 2076 привода двери и обеспечивает функционирование инструмента 2000 для переноса картриджа или еще одного инструмента для переноса картриджа для удаления прошедших тест картриджей с помощью исполнительных механизмов 2030 для перемещения картриджа из их соответствующих приемных сосудов в инструменте 2050 для проведения тестов. Такие картриджи могут перемещаться в хранилище 2006. В качестве альтернативы, инструмент 2000 для переноса может сбрасывать прошедшие тест картриджи в контейнер 2004 для сбора отходов. Этот процесс может осуществляться непрерывно 24 часа/сутки, 7 дней в неделю.
В соответствии с другим вариантом осуществления способа устройство 2050 для проведения тестов может загружаться или выгружаться вручную. Первоначально инструмент 2050 может быть установлен в автоматический режим, в котором инструмент 2000 для переноса осуществляет автоматическую загрузку и выгрузку, как описано выше в отношении первого варианта осуществления способа автоматического переноса. Тем не менее, в случае, когда пользователь выбирает осуществление ручной загрузки или выгрузки из инструмента 2050 для проведения тестов, пользователь может включить пользовательский интерфейс 2071 для установки инструмента 2050 и всей системы в ручном режиме. После того как пользовательский интерфейс 2071 включен, инструмент для проведения тестов 2050 уведомляет контроллер 30, который отключает исполнительный механизм 2076 привода двери и определяет, осуществляется ли тест в данный момент. Другие подсистемы могут деактивироваться контроллером 30, такие как инструмент 2000 для переноса картриджа. Если тест не проводится, контроллер 30 активирует запирающий механизм 2074, который открывает первую дверь 2060. Если тест проводится, контроллер 30 сохраняет дверь 2060 закрытой и уведомляет или указывает пользователю посредством интерфейса 2072 дисплея о том, что дверь 2060 не может быть открыта. После того как тест завершен, контроллер 30 открывает первую дверь 2060 и уведомляет пользователя сообщением о том, что продолжение является допустимым. Пользователь затем может открыть первую дверь 2060 и начать ручную загрузку инструмента для проведения тестов 2050 инокулированными картриджами 90 или их выгрузку.
В соответствии с некоторыми вариантами осуществления пользовательский интерфейс 2071 обеспечивает дополнительную функциональность, такую как определение того, является ли желательной ручная загрузка или выгрузка, а не только активация ручного режима. Также предполагается, что конкретный картридж 90 может быть идентифицирован для удаления. В случае, когда пользователь вводит инструкции о ручной загрузке, контроллер 30 вместе с активацией запирающего механизма 2074 открывает первую дверь 2060 и активирует исполнительный механизм 2078 приемного сосуда для перемещения одного или более пустых приемных сосудов для их выравнивания с проемом первой двери. Напротив, в случае, когда выбрана ручная выгрузка, контроллер 30 обеспечивает функционирование исполнительного механизма 2078 приемного сосуда для того, чтобы обратить картриджи, которые прошли тест, к проему первой двери, в результате чего их можно выгрузить вручную.
Альтернативы системы
Многочисленные варианты, дополнения и комбинации признаков, обсуждаемых выше, можно использовать без отступления настоящего изобретения. Например, на фиг. 29 изображена альтернативная система 1000' для подготовки. Система 1000' является подобной системе 1000 тем, что она включает в себя корпус, который вмещает несколько станций, таких как принимающая станция 1010, станция 1030 для приготовления и станция 1040 для переноса. Тем не менее, система 1000' отличается в том, что касается ее станции 1020' для сбора. Как описано ранее в отношении системы 1000, станция 1020 включает в себя позиционирующее устройство 8, которое переносит инструмент 6 для сбора и применяет такой инструмент 6 для сбора для того, чтобы собрать образец из колонии 4 на планшете 3, и переносит такую собранную колонию к пробирке 11 для суспензии. Такое позиционирующее устройство 8 включает в себя переносящее устройство 15, которое применяют для 15 обеспечения колебания инструмента для сбора, когда он погружен в среду для суспензии.
Станция 1020', с другой стороны, разделяет позиционирующее устройство 8 и переносящее устройство 15. Таким образом, позиционирующее устройство 8 и переносящее устройство 15 независимо соединены с направляющей 18 для переноса. Переносящее устройство 15 содержит держатель 16 для переноса с захватывающим инструментом 17 для удерживания инструмента 6 для сбора с возможностью высвобождения. Таким образом переносящее устройство 15 может перемещаться к позиционирующему устройству 8 таким образом, чтобы захватывающий инструмент 17 мог принимать инструмент 6 для сбора от позиционирующего устройства 8. Держатель 9 инструмента для сбора высвобождает инструмент 6 для сбора после того, как средства 17 для захвата захватили инструмент для сбора. В варианте осуществления, показанном на фиг. 29, инструмент 6' для сбора, собрав ранее образец микроорганизма 4, располагается над пробиркой 11 для суспензии переносящим устройством 15 в исходном положении, указанном сплошными линиями. Переносящее устройство 15 выполнено с возможностью опускания инструмента 6' для сбора в среду 14 для суспензии, содержащуюся в пробирке 11 для суспензии, причем в данном положении инструмент 6' для сбора с образцом 19 погружен в среду 14 для суспензии, как показано пунктирными линиями на фиг. 29. В этом положении переносящее устройство 15 активируется для обеспечения колебания инструмента 6' для сбора в виде линейного вертикального движения в течение периода времени, который является достаточным для высвобождения образца из второго инструмента 6' для сбора. После этого переносящее устройство 15 располагает инструмент 6 для сбора, высвободив его содержимое, в положении ожидания над пробиркой 11 для суспензии, причем данное положение ожидания в варианте осуществления, показанном на фиг. 29, является идентичным исходному положению переносящего устройства 15. После этого переносящее устройство может высвобождать инструмент 6 для сбора над приемным сосудом для отходов, причем за это время позиционирующее устройство 8 может уже принести второй инструмент для сбора и второй образец. Таким образом, в соответствии с этим вариантом осуществления позиционирующее устройство передает инструмент для сбора переносящему устройству 15, а не удерживает инструмент для сбора при переносе образца в среду для суспензии. Такой вариант осуществления может использоваться в случае, когда инструмент для сбора не требует активного присасывания или вакуума для удерживания образца.
Еще один вариант осуществления системы 3000 для подготовки изображен на фиг. 30. Система 3000 является подобной системе 1000 тем, что она включает в себя корпус, который вмещает несколько станций, таких как принимающая станция (не показана), станция 4020 для сбора, станция 4030 для приготовления и станция 4040 для переноса. Кроме того, станция 4020 для сбора включает в себя позиционирующее устройство 3008, которое несет инструмент 3006 для сбора, и станция для приготовления включает в себя пипетатор 2040, который несет наконечник 3046 пипетки. Тем не менее, в отличие от системы 1000, где пробирка для суспензии 11 остается примерно в том же месторасположении для инокуляции собранным образцом 19 с помощью позиционирующего устройства 8 и извлечения суспендированного образца с помощью пипетатора 40, позиционирующее устройство 3008 и пипетатор 3040 направляются к их соответствующим станциям 3020, 3030. Иначе говоря, не пипетатор 3040 перемещается со станции 4030 для приготовления к станции 4020 для сбора для того, чтобы извлечь суспендированный образец из пробирки 3011 для суспензии, а пробирка 3011 для суспензии перемещается от станции 4020 для сбора после инокуляции инструментом 3006 для сбора к станции 4030 для приготовления.
Это достигается с помощью устройства 3070 для перемещения пробирки для суспензии. Устройство 3070 перемещения пробирки для суспензии представляет собой робот, обычно расположенный под основанием 3007, и оно сконфигурировано для перемещения по меньшей мере в двух измерениях, как иллюстрируется двунаправленными стрелками на фиг. 30. В частности, устройство 3007 для перемещения пробирки для суспензии сконфигурировано для того, чтобы удерживать, как например, с помощью приемного сосуда или захватывающего устройства, пробирку 3011 для суспензии и перемещать пробирку 3011 для суспензии под основанием 3007, а также перемещать пробирку 3011 для суспензии между заранее обозначенными положениями А и А', находящимися на станции для сбора и станции для приготовления, соответственно. В связи с этим, основание может иметь отверстия, через которые устройство для перемещения может поднимать и опускать пробирку для суспензии в этих заранее обозначенных положениях.
Кроме того, каждое из этих положений А и А' имеет нефелометр 3020, 3060, такой как один из нефелометров, описанных ранее, который включает в себя лазер или излучатель света 3021, 3061 и детектор 3022, 3062. Таким образом, первое положение А, расположенное на станции 4020 для сбора, включает в себя первый нефелометр 3020, и второе положение А', расположенное на станции 4030 для приготовления, включает в себя второй нефелометр 3060. В соответствии с одним вариантом осуществления нефелометр представляет собой 8-канальное устройство, которое может измерять мутность в восьми кюветах одновременно, как например, за счет того, что оно включает в себя несколько источников света и детекторов.
В способе применения системы 3000 чашка 3003 для культивирования перемещается от принимающей станции к станции 4020 для сбора и может располагаться на платформе 3002. Такая чашка 3003 включает в себя среду 3005 для культивирования и одну или более колоний микроорганизмов. Целевую колония 3004 выбирают и инструмент 3006 для сбора располагается над целевой колонией 3004. Инструмент 3006 для сбора опускается для извлечения образца 3019 целевой колонии 3004 с помощью позиционирующего устройства 3008. После этого, позиционирующее устройство 3008 перемещает собранную колонию 3019 в положение А над пробиркой 2011 для суспензии в пределах станции 4020 для сбора. Позиционирующее устройство 3008 опускает собранный микроорганизм 3019 и погружает его в среду для суспензии внутри пробирки 3011 для суспензии. Переносящее устройство 3015 обеспечивает колебание инструмента 3006 для сбора для того, чтобы высвободить микроорганизм в среду для суспензии. Нефелометр 3020 измеряет мутность суспензии. Дополнительные процедуры сбора микроорганизма 3004 можно осуществлять до тех пор, пока не будет достигнута желаемая мутность.
После того как желаемая мутность достигается посредством последовательных процедур сбора колоний, устройство 3070 для перемещения пробирки опускает пробирку 3011' для суспензии с суспензией микроорганизм в ней до тех пор, пока она не окажется под основанием 3007. Устройство для перемещения затем перемещает пробирку 3011' ко второму положению А' пробирки, располагающемуся на станции 4030 для приготовления. После этого, устройство 3070 для перемещения поднимает пробирку 3011' через отверстие в основании 3007 для подготовки планшета 3042 для MALDI. Подготовка планшета для MALDI осуществляется с помощью пипетатора 3040, который перемещается в положение А' над пробиркой 3011' и извлекает аликвоту суспензии из нее. Пипетатор 3040 затем перемещает аликвоту в положение В над планшетом 3042 для MALDI, где пипетатор 3040 осаждает аликвоту на планшет 3040 для MALDI в предварительно определенных местоположениях 3044, как подробно описано выше. После того как планшет 3042 для MALDI подготовлен, пипетатор 3040 может затем всасывать деионизированную воду или некую другую среду для суспензии в пробирку 2011' для суспензии во втором положении А' пробирки. Нефелометр 3060 во втором положении А' пробирки измеряет мутность. После того как желательное для AST число единиц МакФарланда достигается, пипетатор 3040 всасывает аликвоту из пробирки 2011' для суспензии в положении А', а затем переносит эту аликвоту в положение С, где пипетатор 3040 инокулирует пробирку 3082 с бульоном для AST суспензией. Пробирка 3082 с бульоном для AST перемещается к станции 4040 для переноса с помощью устройства 3080 для перемещения пробирки для AST аналогично тому, как оно перемещается устройством 3070 для перемещения посредством опускания пробирки под основание 3007 и ее транспортировки под основанием к положению в пределах станции 4040 для переноса. Оттуда образец в пробирке 3082 для AST инокулируется в картриджи 90 для AST, как описано ранее.
В соответствии с другими вариантами осуществления системы 3000 станция 4030 для приготовления может включать в себя два положения пробирки, в результате чего система включает в себя в общей сложности три положения пробирки для суспензии, одно на станции 4020 для сбора и два на станции 4030 для приготовления. В соответствии с таким вариантом осуществления одно из положений пробирки в пределах станции 4030 для приготовления может использоваться для подготовки планшета для MALDI, в то время как другое положение в пределах станции 4030 для приготовления может использоваться для подготовки пробирок 3082 для AST. В связи с этим, положение пробирки для подготовки к MALDI может не иметь нефелометра, поскольку мутность суспензии для подготовки к MALDI была бы определена нефелометром 3020 на станции 4020 для сбора. Тем не менее, положение пробирки для суспензии для подготовки пробирки для AST будет иметь нефелометр 3060 для того, чтобы помочь пипетатору 2040 в разведении суспензии до соответствующего числа единиц МакФарланда для AST.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЯМОЙ ИНОКУЛЯЦИИ БУЛЬОНА ИЗ ИСХОДНОЙ СУСПЕНЗИИ | 2019 |
|
RU2807112C2 |
| АВТОМАТИЗИРОВАННЫЙ ОТБОР МИКРООРГАНИЗМОВ И ИХ ИДЕНТИФИКАЦИЯ С ПОМОЩЬЮ МАЛДИ | 2013 |
|
RU2639777C9 |
| УСТРОЙСТВО И КЮВЕТЫ ДЛЯ ОПТИЧЕСКОГО КОНТРОЛЯ НЕБОЛЬШИХ ОБЪЕМОВ ЖИДКОГО ОБРАЗЦА | 2015 |
|
RU2657020C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНОКУЛЮМА С ЕДИНИЧНЫМ КОЛИЧЕСТВОМ МИКРООРГАНИЗМОВ | 2024 |
|
RU2830890C1 |
| ШТАММ БАКТЕРИЙ CAMPYLOBACTER JEJUNI ДЛЯ МИКРОБИОЛОГИЧЕСКИХ ИССЛЕДОВАНИЙ, СВЯЗАННЫХ С ОПРЕДЕЛЕНИЕМ ЧУВСТВИТЕЛЬНОСТИ МИКРООРГАНИЗМОВ К АНТИБАКТЕРИАЛЬНЫМ ПРЕПАРАТАМ | 2022 |
|
RU2796348C1 |
| СИСТЕМЫ И СПОСОБЫ ЦЕНТРИРОВАНИЯ КРУГЛОГО ОБЪЕКТА | 2019 |
|
RU2799961C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧУВСТВИТЕЛЬНОСТИ БАКТЕРИАЛЬНЫХ ГЕМОКУЛЬТУР К АНТИБИОТИКАМ | 2017 |
|
RU2666257C1 |
| Защитная среда для криохранения для анаэробных, аэробных, факультативно анаэробных и микроаэрофильных микроорганизмов в фекальной микробиоте | 2019 |
|
RU2726299C1 |
| СПОСОБ КОЛИЧЕСТВЕННОЙ ОЦЕНКИ ЛИТИЧЕСКОЙ АКТИВНОСТИ БАКТЕРИОФАГОВ | 2015 |
|
RU2587636C1 |
| ПОЛИРЕЗИСТЕНТНЫЙ ШТАММ БАКТЕРИЙ ESCHERICHIA COLI ДЛЯ ОПРЕДЕЛЕНИЯ БАКТЕРИЦИДНОГО ДЕЙСТВИЯ АНТИБАКТЕРИАЛЬНЫХ ПРЕПАРАТОВ В ВЕТЕРИНАРИИ | 2022 |
|
RU2797383C1 |
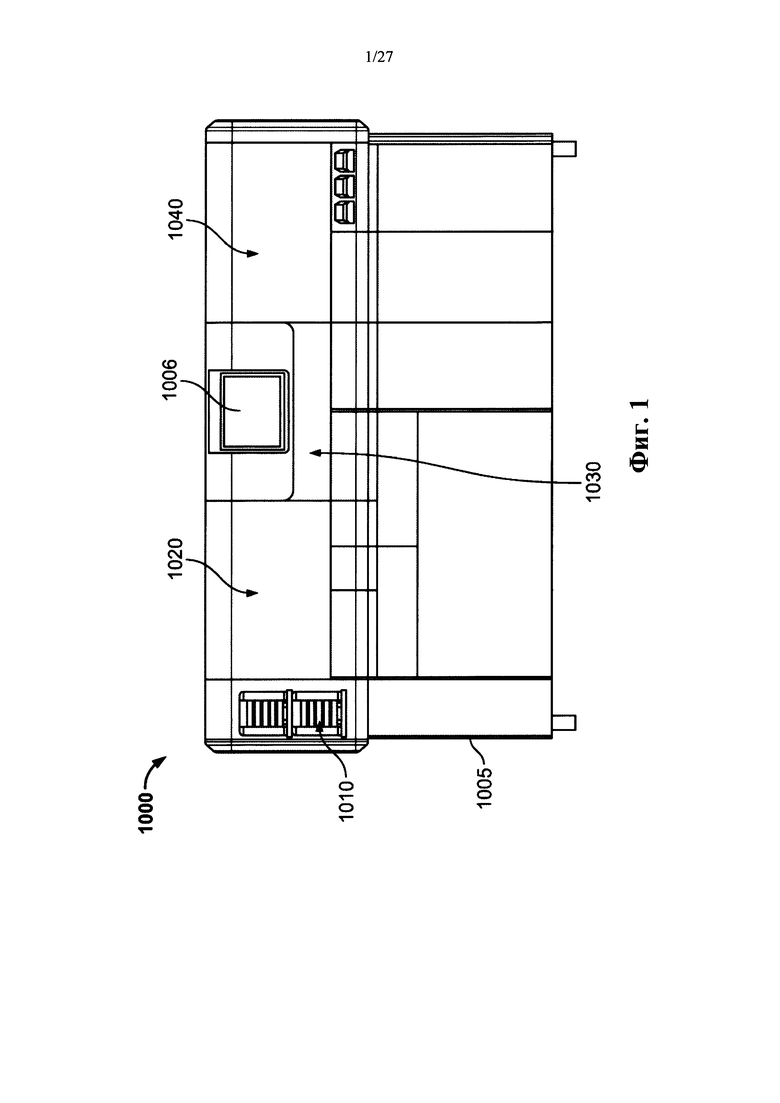

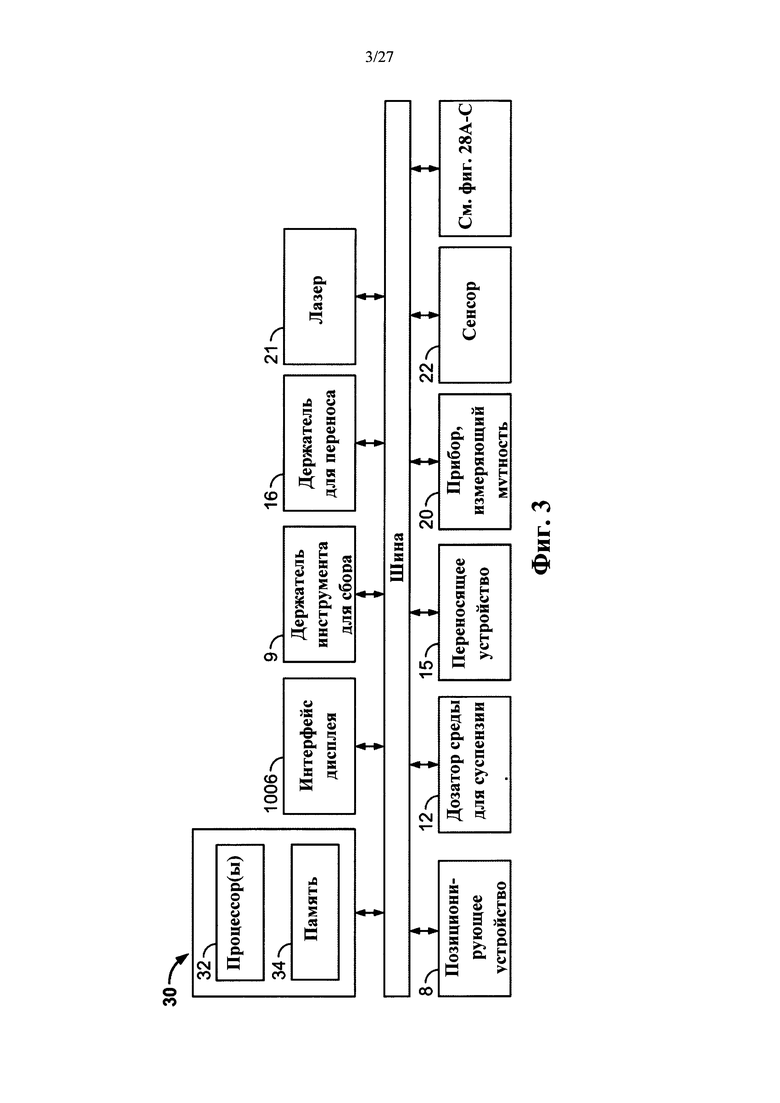
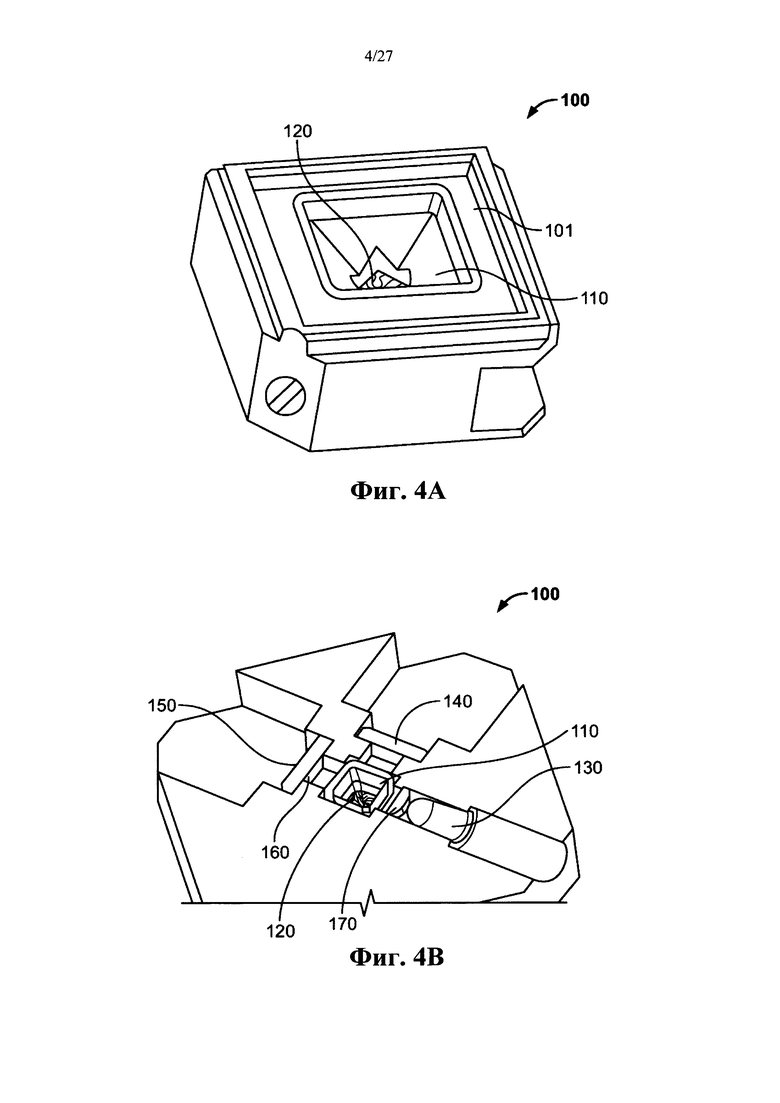
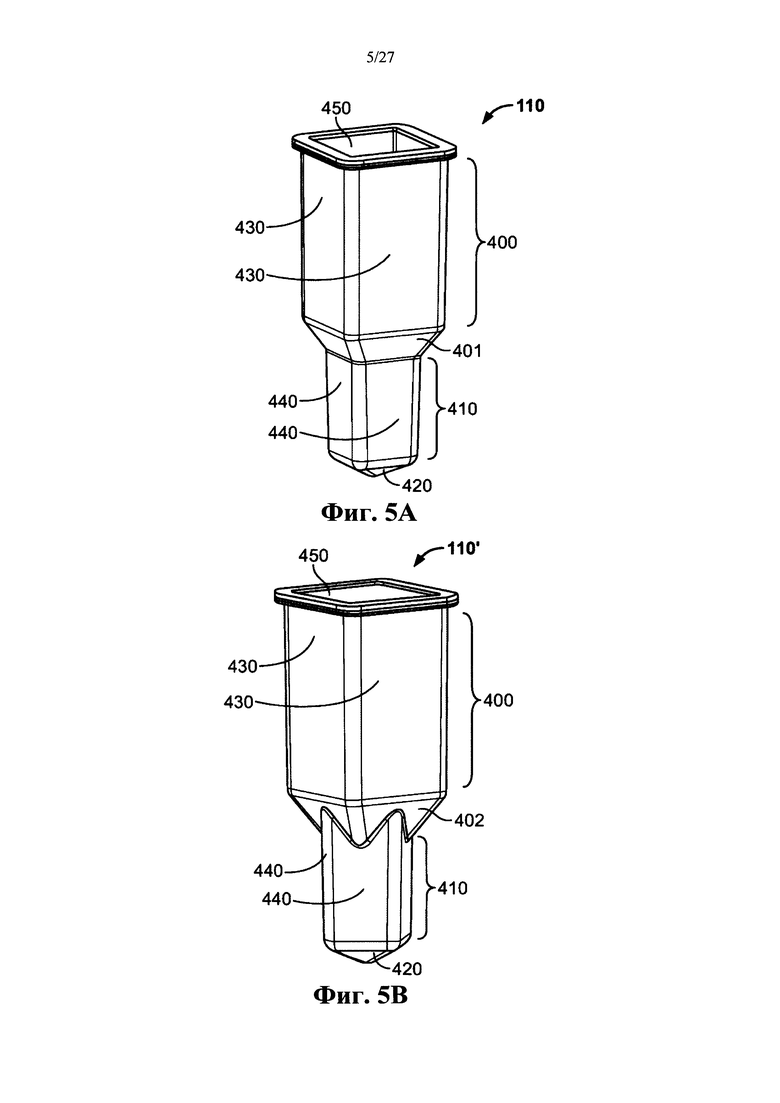

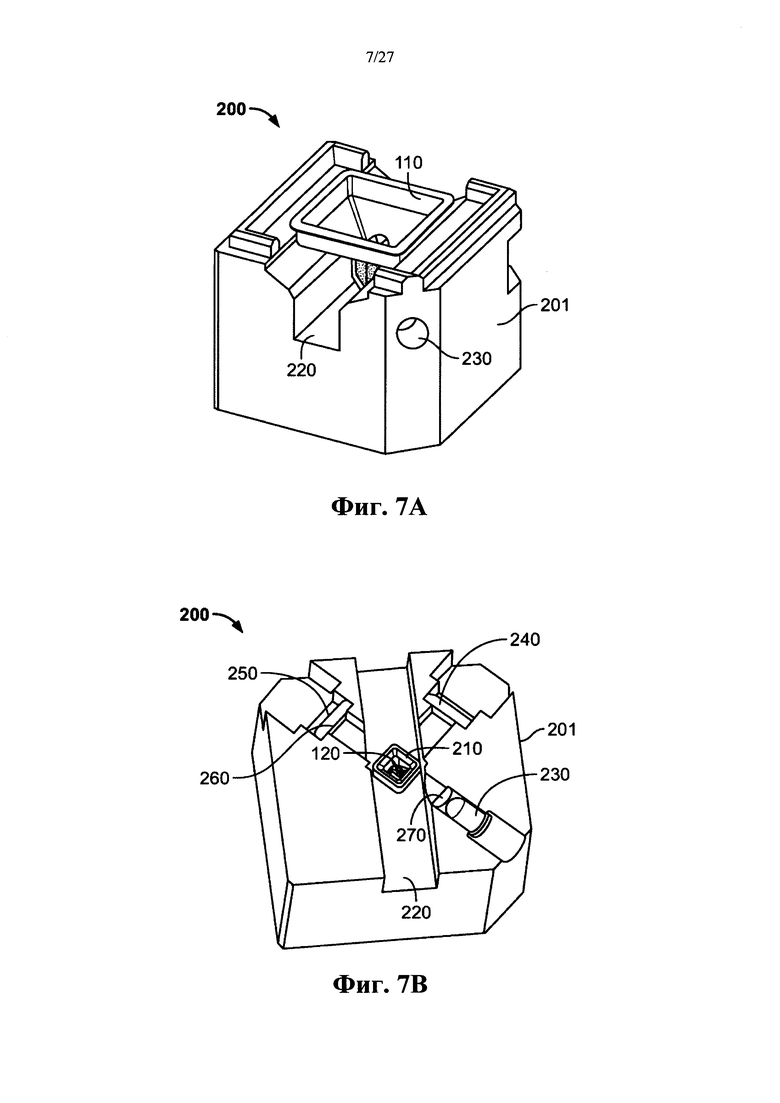
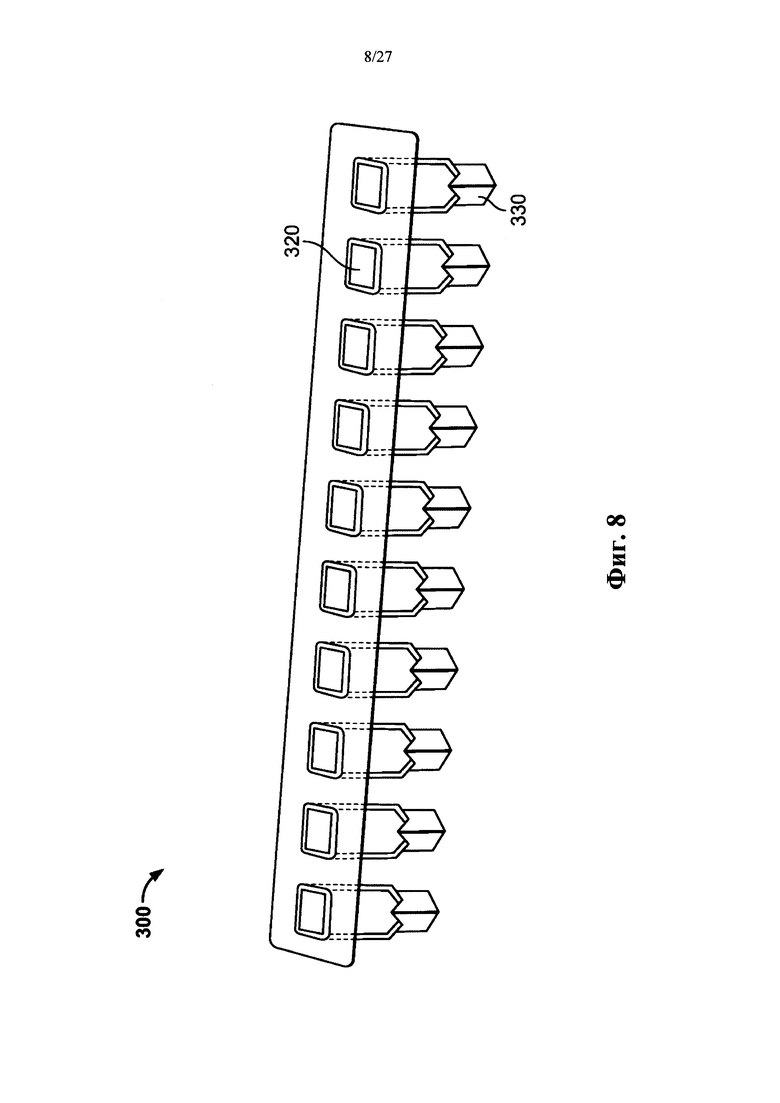

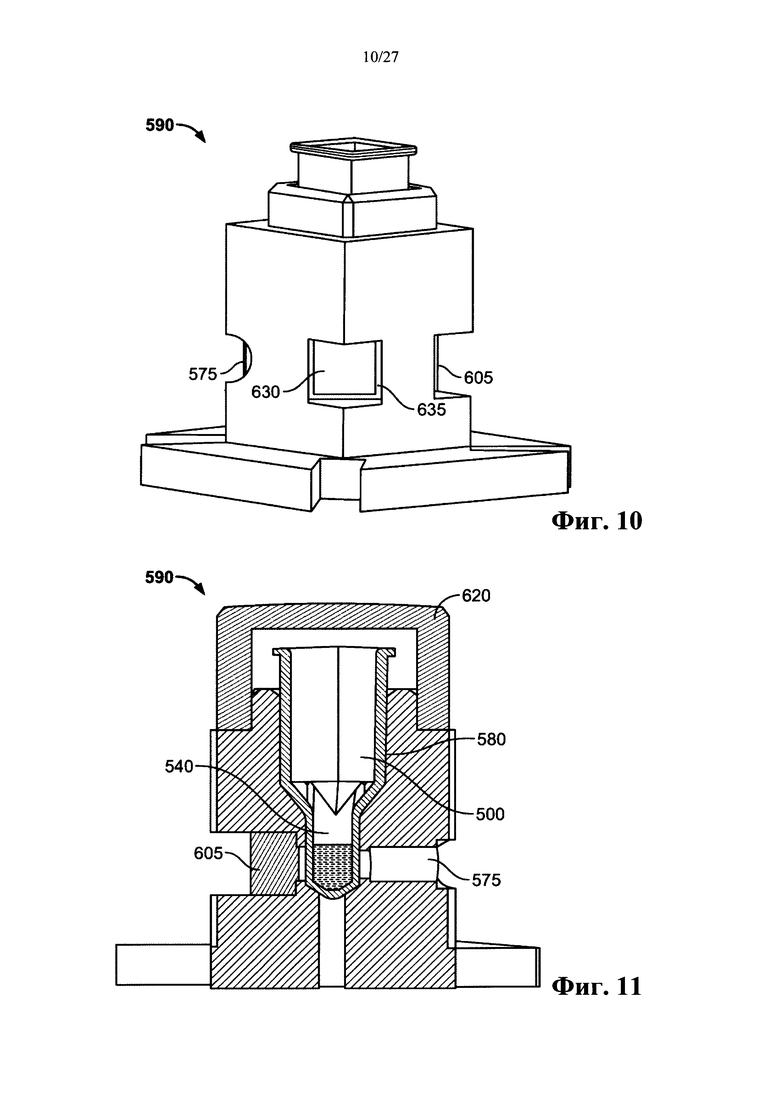
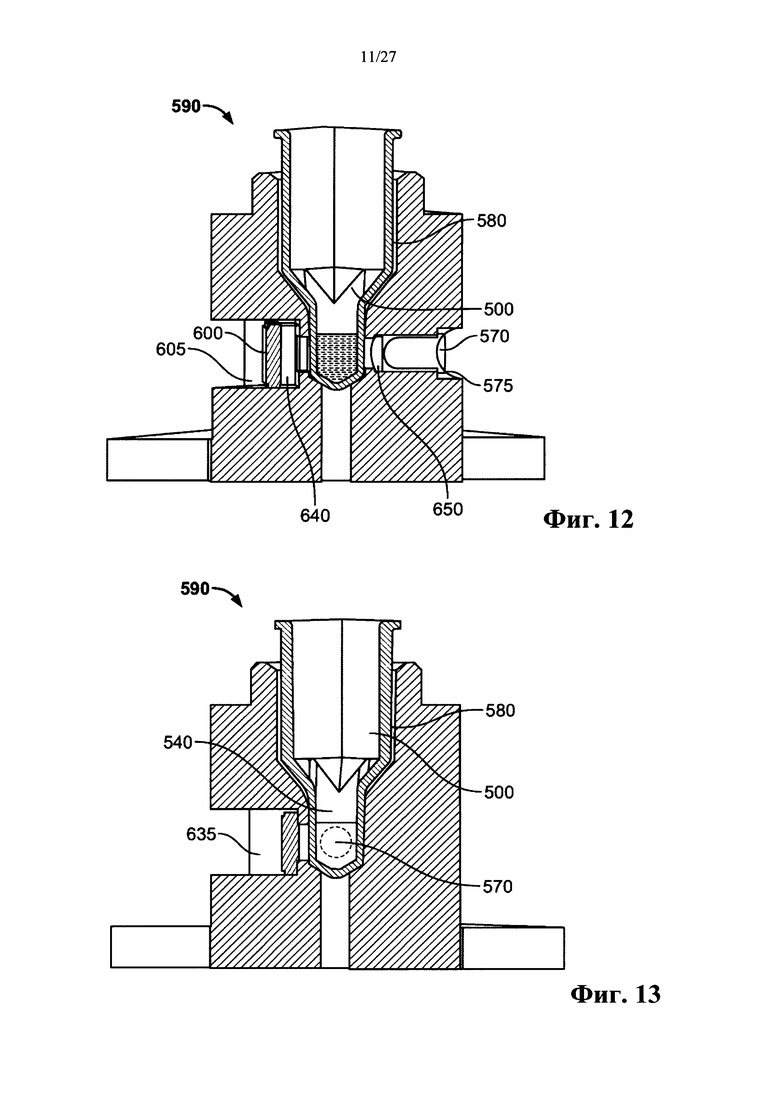

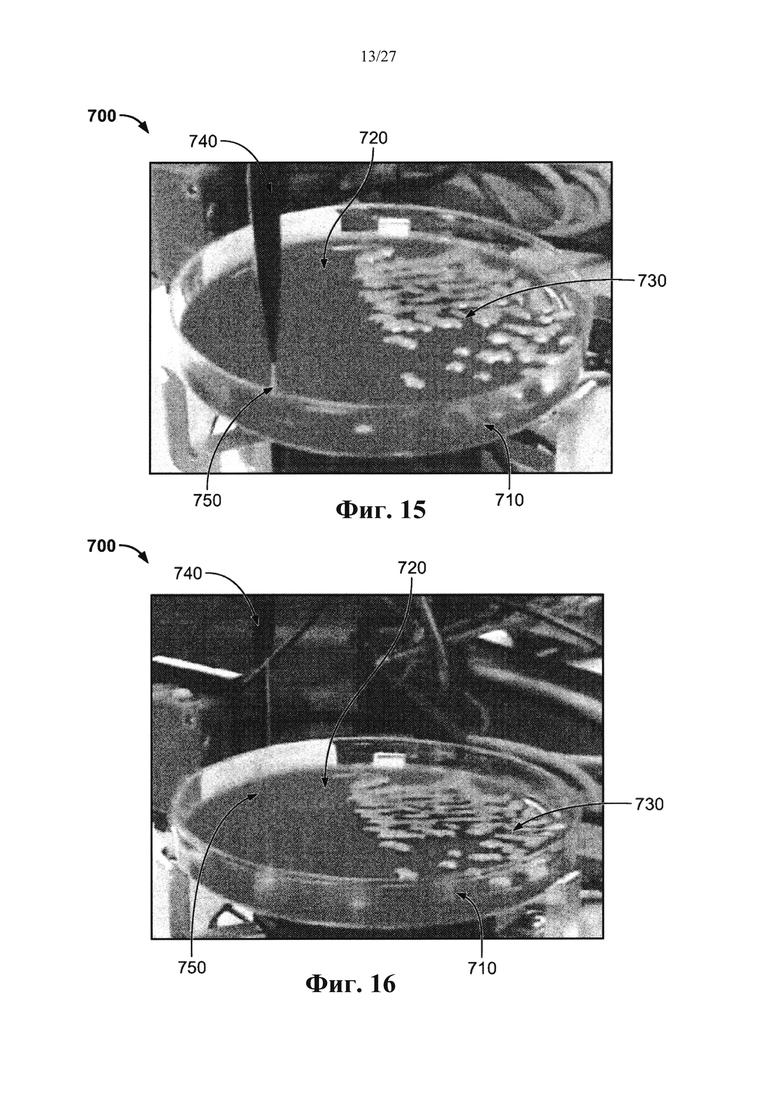

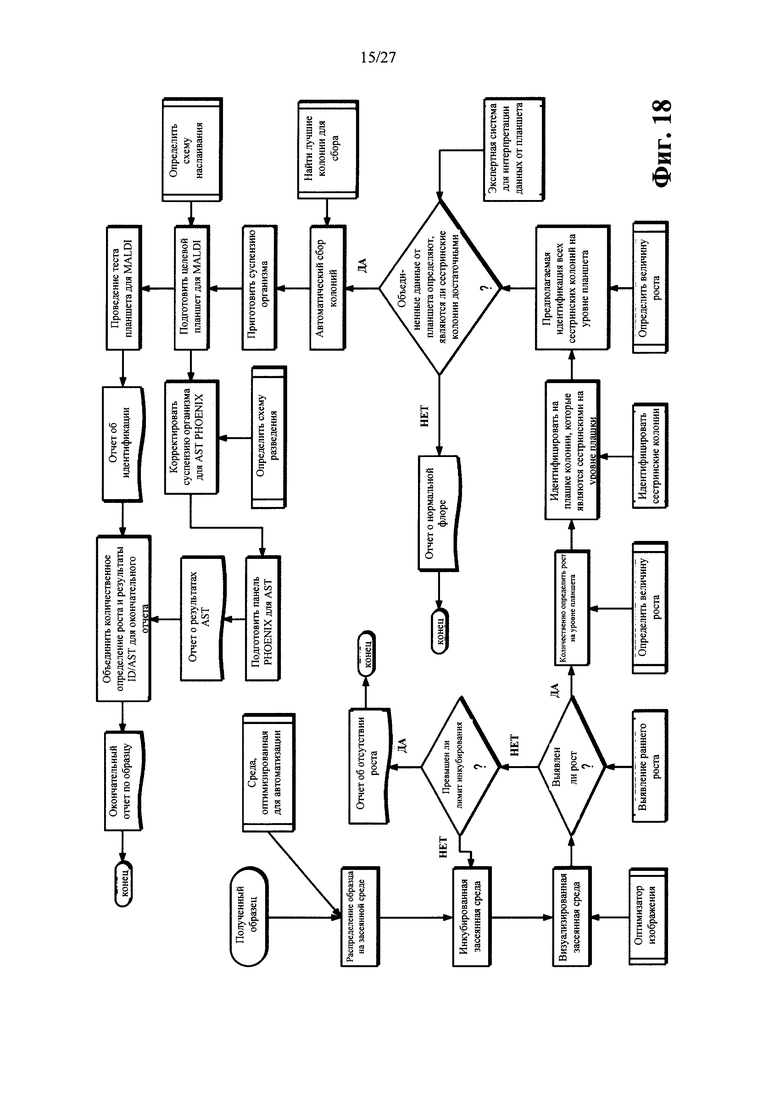
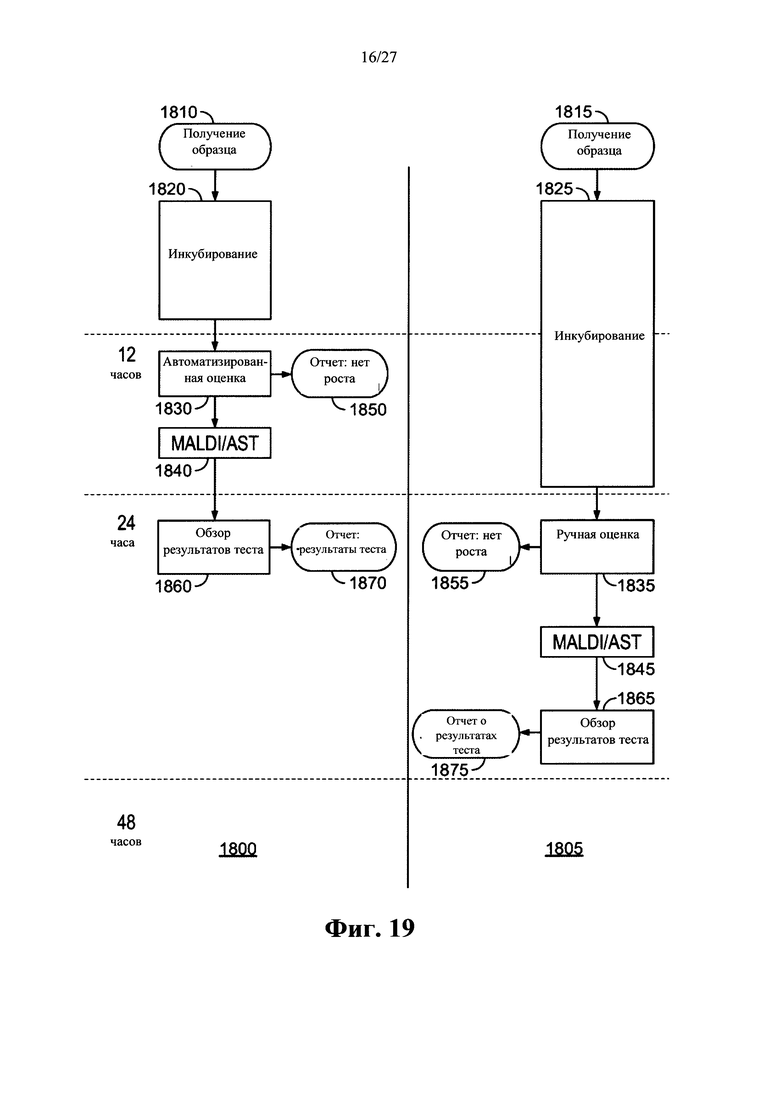

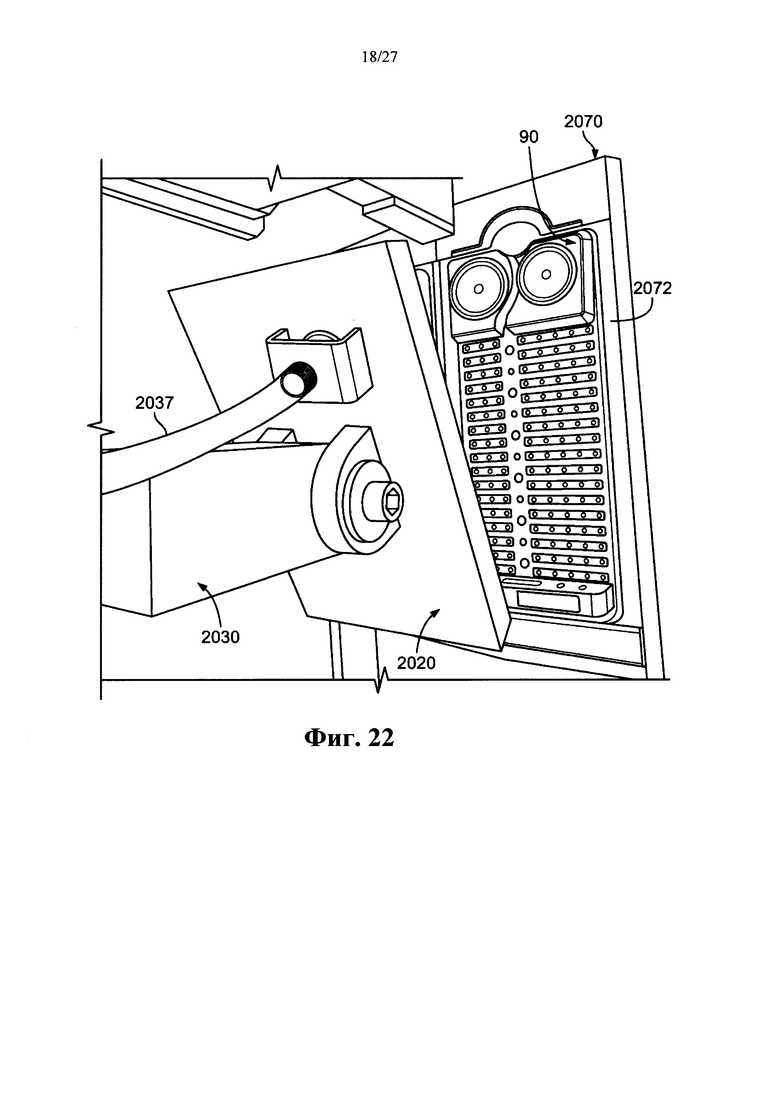

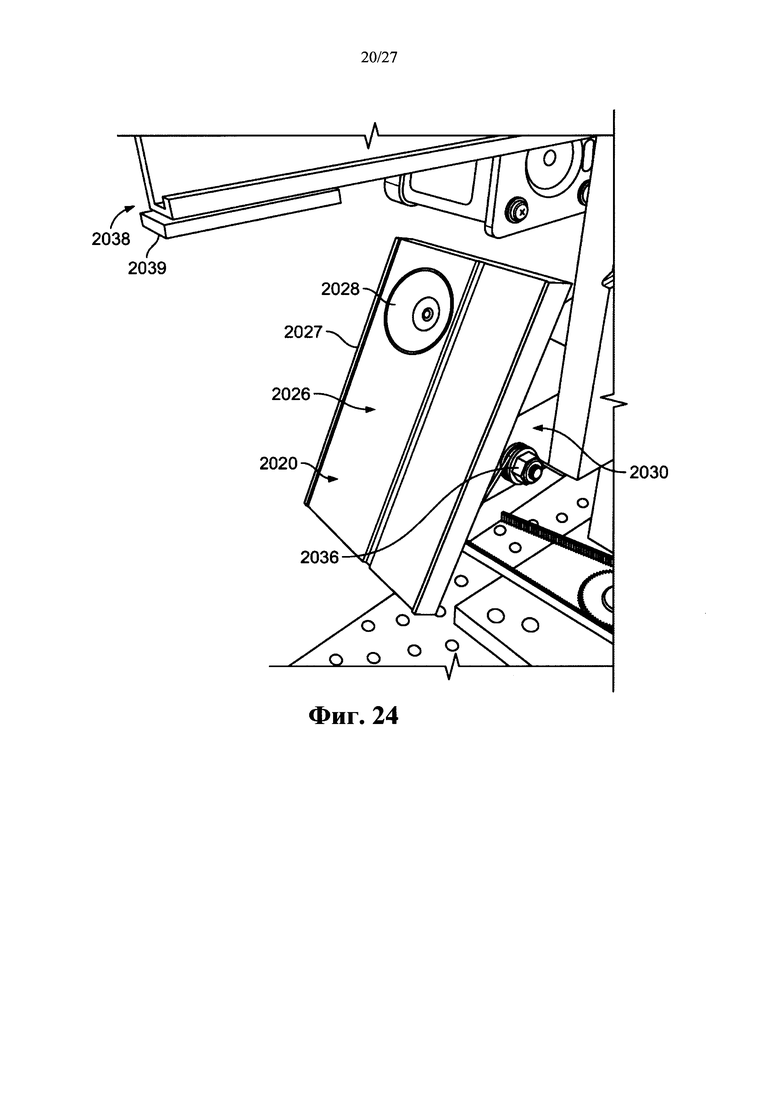

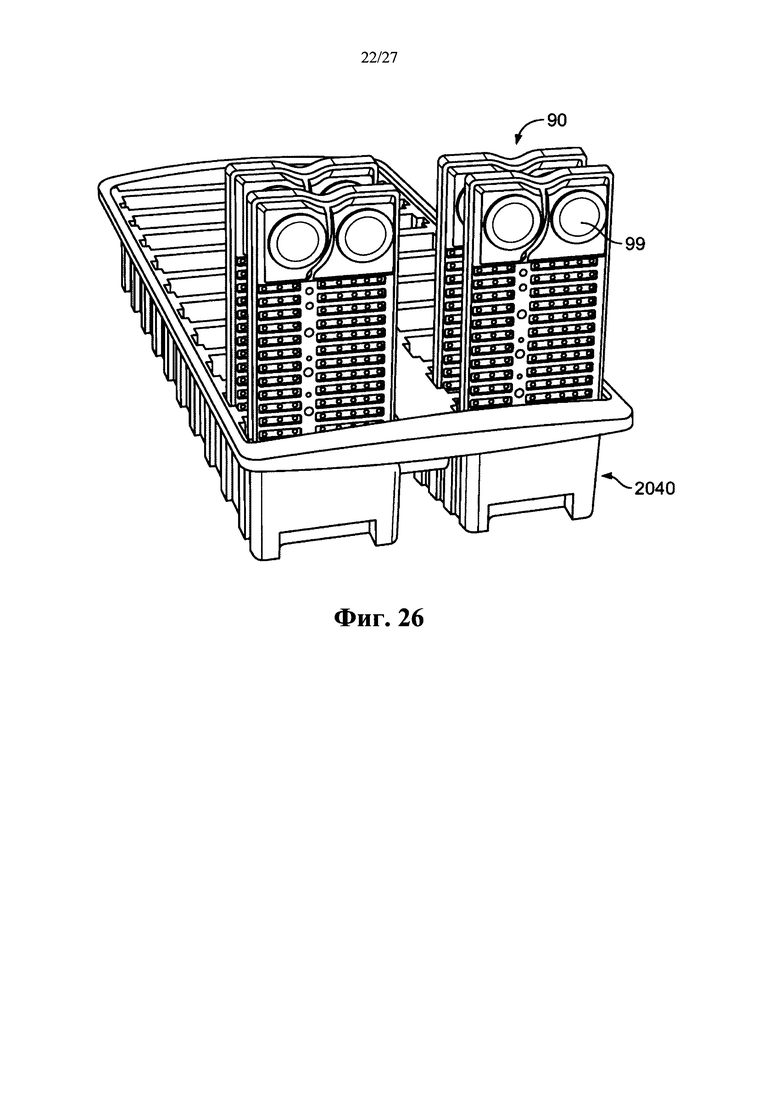
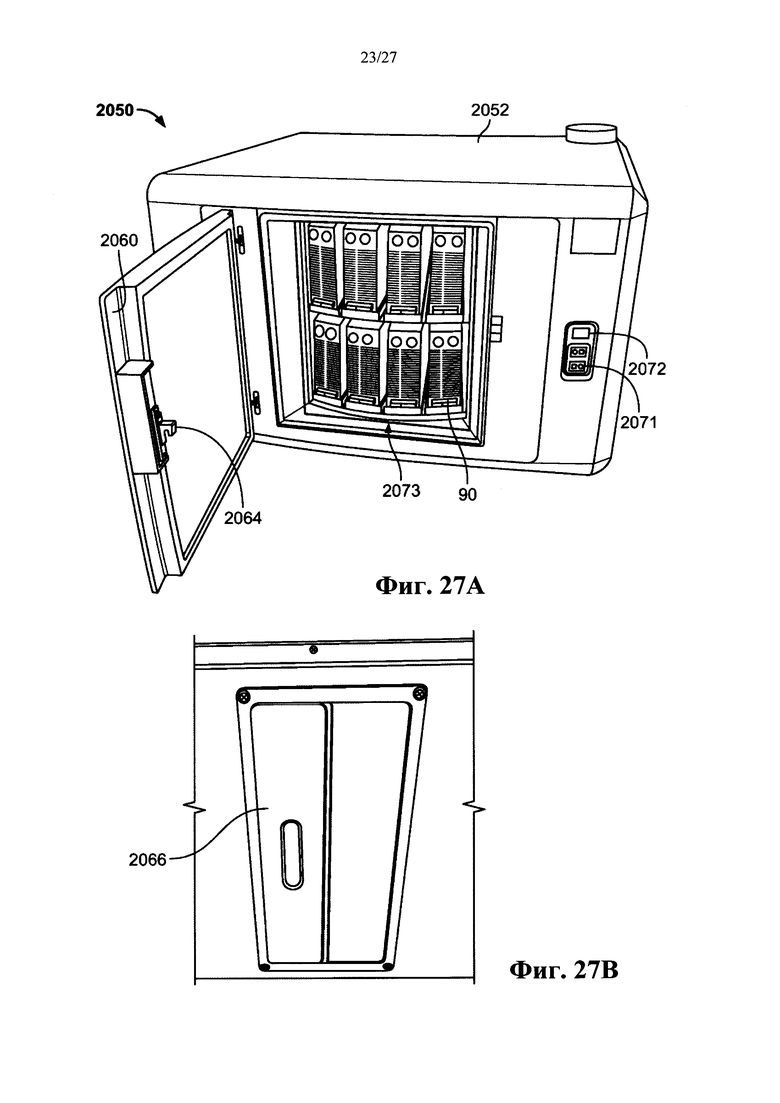

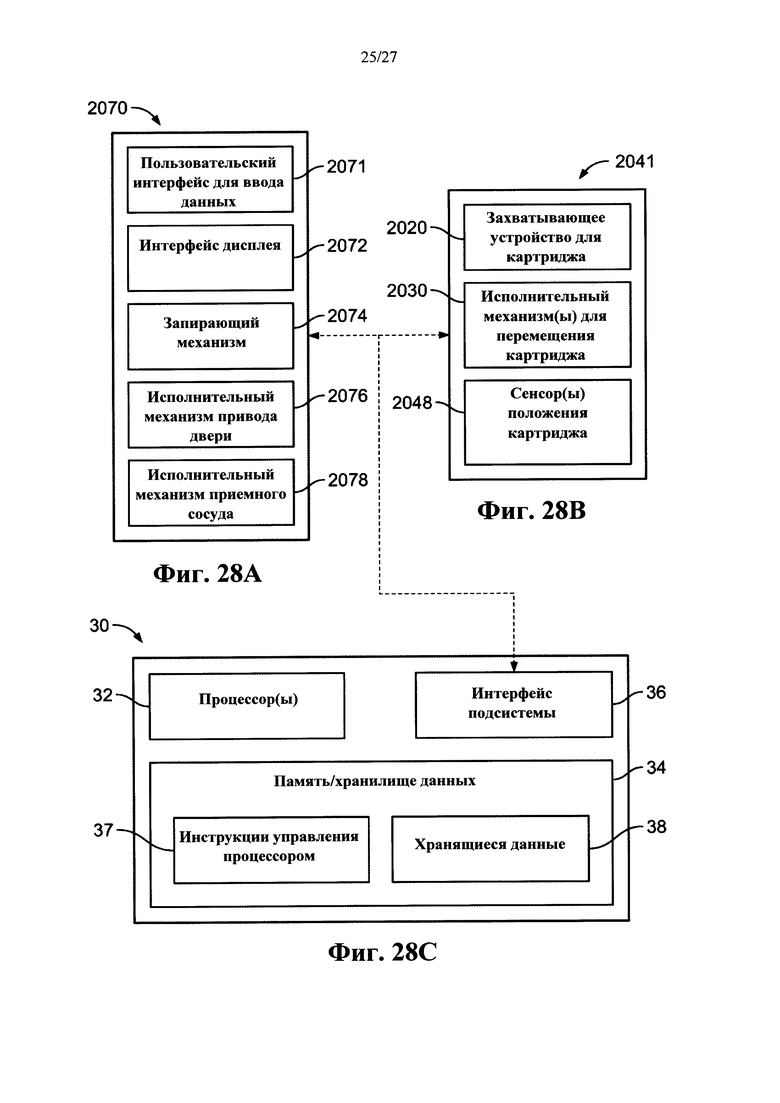
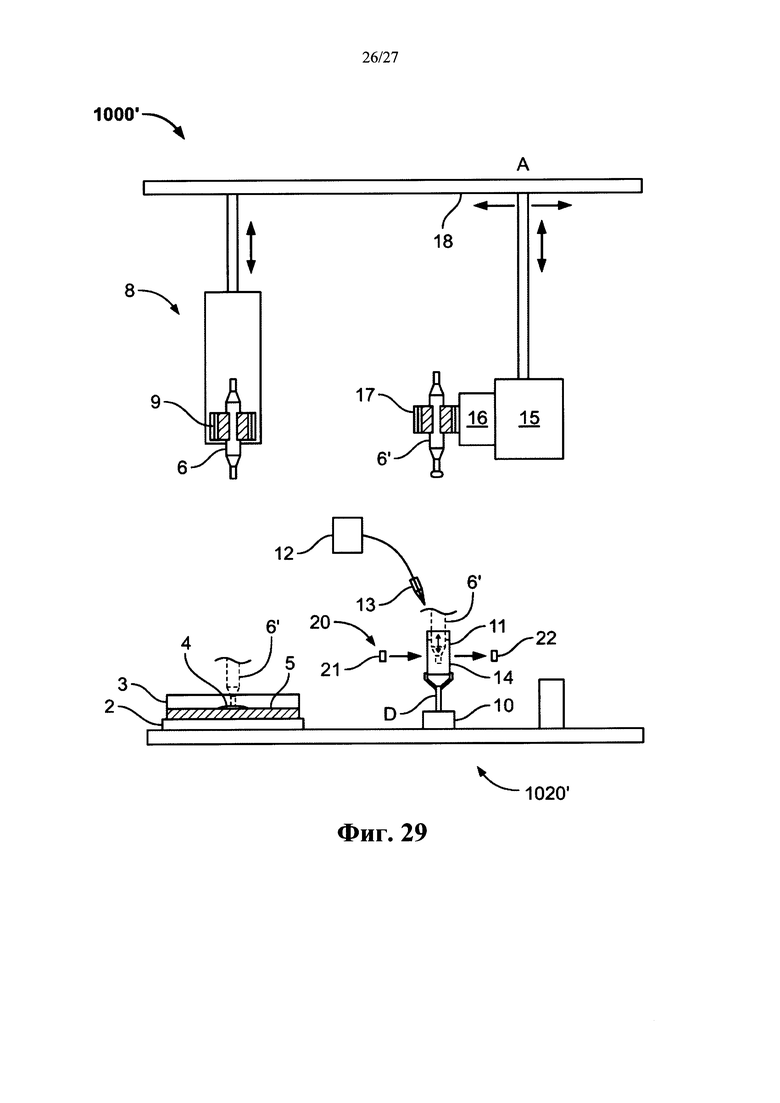

Изобретение относится к способам и системам для определения местоположения и выбора колонии микроорганизмов, а также для идентификации микроорганизмов с применением масс-спектрометрии. Способ определения местоположения и выбора колонии микроорганизмов на чашке для культивирования и приготовления суспензии одного образца с выбранной колонией для нескольких анализов включает автоматизированные стадии: определения местоположения и выбора колонии микроорганизмов на чашке для культивирования; получения образца выбранной колонии микроорганизмов; переноса полученного образца в контейнер, имеющий количество среды для суспензии, причем контейнер адаптирован для приема нефелометром; приготовления суспензии образца посредством переноса по меньшей мере части полученного образца в среду для суспензии с применением роботизированного инструмента для сбора; автоматического получения аликвоты приготовленной суспензии; дозирования порции суспензии на приемный сосуд для первого анализа; переноса приемного сосуда для первого анализа с образцом в аппарат для осуществления масс-спектрометрии для идентификации образца выбранной колонии микроорганизмов; определения того, находится ли мутность суспензии в рамках предварительно определенных технических требований для второго анализа с применением автоматизированного нефелометра, и, если она находится в рамках технических требований, определения дозируемого объема для второго анализа, исходя из измеренной мутности; и автоматической инокуляции контейнера для образца для второго анализа суспензией, если определено, что суспензия находится в рамках технических требований; причем, если определено, что суспензия не находится в рамках технических требований для применения во втором анализе без разведения, автоматической коррекции объема для обеспечения предварительного определенного количества образца, подходящей для второго анализа, перед инокуляцией контейнера для второго анализа; автоматического получения аликвоты суспензии в контейнере для второго анализа и автоматической инокуляции приемного сосуда для второго анализа адаптированной суспензией. Технический результат – повышение точности анализа при сохранении качества образца. 4 н. и 15 з.п. ф-лы, 30 ил.
1. Способ определения местоположения и выбора колонии микроорганизмов на чашке для культивирования и приготовления суспензии одного образца с выбранной колонией для нескольких анализов, причем способ включает автоматизированные стадии:
определения местоположения и выбора колонии микроорганизмов на чашке для культивирования;
получения образца выбранной колонии микроорганизмов;
переноса полученного образца в контейнер, имеющий количество среды для суспензии, причем контейнер адаптирован для приема нефелометром;
приготовления суспензии образца посредством переноса по меньшей мере части полученного образца в среду для суспензии с применением роботизированного инструмента для сбора;
автоматического получения аликвоты приготовленной суспензии;
дозирования порции суспензии на приемный сосуд для первого анализа;
переноса приемного сосуда для первого анализа с образцом в аппарат для осуществления масс-спектрометрии для идентификации образца выбранной колонии микроорганизмов;
определения того, находится ли мутность суспензии в рамках предварительно определенных технических требований для второго анализа с применением автоматизированного нефелометра, и, если она находится в рамках технических требований, определения дозируемого объема для второго анализа, исходя из измеренной мутности; и
автоматической инокуляции контейнера для образца для второго анализа суспензией, если определено, что суспензия находится в рамках технических требований;
причем, если определено, что суспензия не находится в рамках технических требований для применения во втором анализе без разведения, автоматической коррекции объема для обеспечения предварительного определенного количества образца, подходящей для второго анализа, перед инокуляцией контейнера для второго анализа;
автоматического получения аликвоты суспензии в контейнере для второго анализа и автоматической инокуляции приемного сосуда для второго анализа адаптированной суспензией.
2. Способ по п. 1, причем способ включает автоматизированную стадию выбора колоний для сбора посредством обеспечения изображений колоний, при этом на основании информации с изображений делается выбор перед автоматизированной стадией определения местоположения и выбора колонии микроорганизмов на чашке для культивирования, стадию обеспечения чашки для культивирования, содержащей ряд колоний микроорганизмов, получения первоначального изображения чашки для культивирования, включающего в себя все колонии микроорганизмов, отображения первоначального изображения чашки для культивирования, включающего в себя все колонии микроорганизмов, на дисплее и выбора в ручном режиме по меньшей мере одной колонии микроорганизмов на первоначальном изображении.
3. Способ по п. 2, причем чашка для культивирования обеспечена индивидуальными идентификационными данными, идентифицирующими чашку для культивирования, такими как штрих-код, и при этом способ включает стадию сохранения первоначального изображения чашки для культивирования, включающего в себя все колонии, сохранения информации, которая касается по меньшей мере одной выбранной вручную колонии микроорганизмов, сохранения идентификационных данных чашки для культивирования в памяти центрального управляющего компьютера.
4. Способ по п. 1, дополнительно включающий идентификацию допустимой области для сбора образца на планшете для культивирования и опускание инструмента для сбора, который переносится роботизированным инструментом для сбора, в контакт с образцом на поверхности планшета для культивирования в идентифицированной допустимой области.
5. Способ по п. 1, причем роботизированный инструмент для сбора переносит инструмент для сбора, несущий полученный образец из чашки для культивирования, в контейнер для образца для первого анализа, при этом дополнительно предусмотрен подъем инструмента для сбора от поверхности планшета для культивирования с применением роботизированного инструмента для сбора и мониторинг инструмента для сбора, когда он поднимается от поверхности чашки для культивирования для выявления образования нити образца, тянущейся от инструмента для сбора.
6. Способ по п. 5, причем инструмент для сбора подвергают мониторингу с применением одного из электрической емкости или визуализации.
7. Автоматизированная система для приготовления суспензии одного образца, аликвоты из которой отбираются как для идентификации (ID) микроорганизмов в образце, так и для определения чувствительности к антибиотикам (AST) у микроорганизмов, причем система содержит:
первую секцию для приготовления образца для ID анализа, причем первая секция содержит:
средство для получения засеянной культуры в планшете для культивирования;
при этом система находится в сообщении с визуализирующим средством для получения изображения засеянной культуры и средством для идентификации колонии на засеянной культуре и обозначения такой колонии для автоматизированного сбора образцов, исходя из информации с изображения;
первый робот для автоматического манипулирования инструментом для сбора;
средство для сообщения местоположения колонии первому роботу;
средство для управления сбором колонии первым роботом, причем первый робот дополнительно сконфигурирован для переноса собранного образца к первой станции для приготовления суспензии образца;
средство для обеспечения жидкости для суспензии в пробирку для суспензии на первой станции для приготовления образца, причем роботизированный инструмент для сбора сконфигурирован таким образом, чтобы осаждать собранный образец в жидкость для суспензии;
нефелометр на первой станции для измерения мутности суспензии, причем автоматизированная система в ответ на результат измерения мутности, который находится вне предварительно определенного значения мутности, корректирует одно из количества образца или количества суспензии в пробирке для суспензии для обеспечения суспензии с концентрацией образца в предварительно определенном диапазоне;
второй робот, причем второй робот представляет собой пипетатор, который получает первую аликвоту суспензии на первой станции и инокулирует приемный сосуд для применения в ID анализе;
средства для переноса пробирки для суспензии с остальной частью суспензии с первой станции для приготовления суспензии образца на вторую станцию для приготовления суспензии образца;
причем второй робот дополнительно сконфигурирован для коррекции концентрации образца в пробирке для суспензии до предварительно определенной концентрации для второго анализа, а также для получения второй аликвоты суспензии образца, имеющей скорректированную концентрацию, и инокуляции пробирки для образца для AST анализа второй аликвотой суспензии; и
вторую секцию для инокуляции панели для AST анализа; причем автоматизированная система имеет средство для переноса инокулированной пробирки для образца от первой секции ко второй секции; при этом вторая секция имеет третий робот, представляющий собой пипетатор, который получает аликвоту из инокулированной пробирки для образца и инокулирует панель для AST полученной аликвотой; и
загрузочный робот, который загружает инокулированную панель в аппарат, в котором осуществляется AST.
8. Система по п. 7, причем аппарат для AST сконфигурирован таким образом, что он имеет по меньшей мере две двери, причем первая дверь получает панель от загрузочного робота для переноса инокулированной панели для AST, при этом загрузочный робот представляет собой захватывающее приспособление для панели, включающее в себя захватывающий планшет, причем захватывающий планшет соединен со штангой управляемого по трем осям шаговым электродвигателем крепления таким образом, чтобы захватывающий планшет мог поворачиваться относительно оси соединительного элемента из первого положения во второе положение; и при этом захватывающий планшет включает в себя захватывающую поверхность, которая выполнена с возможностью захвата объектов.
9. Система по п. 7, дополнительно содержащая детектор для выявления того, образуется ли нить образца, когда первый робот переносит инструмент для сбора, несущий образец, от чашки для культивирования.
10. Система по п. 9, причем нить выявляется посредством оптического или электрического мониторинга инструмента для сбора, когда инструмент для сбора поднимается от чашки для культивирования.
11. Система по п. 10, дополнительно содержащая механизм для срезания нити, причем механизм выбран из группы, состоящей из режущего инструмента, ультразвуковой обработки, высушивания и заморозки.
12. Система по п. 11, причем режущий инструмент выбран из группы, состоящей из лазера, стержня, провода и лезвия.
13. Система по п. 12, причем режущий инструмент выполнен с возможностью нагрева.
14. Автоматизированная система для приготовления суспензии одного образца, аликвоты из которой отбираются как для идентификации (ID) микроорганизмов в образце, так и для определения чувствительности к антибиотикам (AST) у микроорганизмов, причем система содержит:
первую станцию, на которой готовится суспензия, причем первая станция содержит контроллер, который управляет приготовлением суспензии образца, аликвоты из которой получают для ID и AST;
первый робот, сконфигурированный для автоматического получения, переноса и удаления инструмента для сбора, в сообщении с контроллером, причем инструмент для сбора представляет собой наконечник пипетки, и первый робот управляется контроллером для получения наконечника пипетки; применения наконечника пипетки для сбора образца с чашки для культивирования, полученной первой станцией, контроллер, направляющий первый робот для переноса инструмента для сбора в местоположение на чашке для культивирования, в котором находится колония, обозначенная как подлежащая сбору, при этом первый робот приводит наконечник пипетки в контакт с обозначенной колонией и переносит собранный образец для сбора в пробирку для суспензии, в которой располагается разбавитель для суспензии, причем первый робот помещает наконечник пипетки, несущей образец, в контакт с суспензией, высвобождает образец в пробирку для суспензии;
дозатор разбавителя для суспензии в сообщении с контроллером для дозирования разбавителя для суспензии в пробирку для суспензии;
нефелометр в сообщении с контроллером, причем нефелометр измеряет мутность суспензии, а контроллер отвечает на результат нефелометрического измерения, причем контроллер, если результат нефелометрического измерения находится за передами предварительно определенного значения или диапазона значений, будет корректировать концентрацию образца в суспензии посредством одного из действия, приводящего к добавлению большего количества разбавителя дозатором разбавителя для суспензии, тем самым снижая мутность образца, действия, приводящего к сбору и осаждению большего количества образца в суспензии инструментом для сбора, тем самым повышая мутность образца, или посредством обоих этих действий, тем самым корректируя концентрацию образца в суспензии;
первую станцию, дополнительно содержащую первый роботизированный пипетатор, причем, когда контроллер, исходя из полученных измерений мутности, определяет, что мутность суспензии находится в пределах предварительно определенных значений мутности, контроллер направляет первому роботизированному пипетатору инструкции по получению первой аликвоты суспензии образца для ID анализа и по инокуляции приемного сосуда для ID анализа полученной аликвотой;
первое переносящее устройство в сообщении с контроллером, причем контроллер направляет переносящему устройству инструкции по переносу пробирки для суспензии из первого местоположения во второе местоположение в первой секции после того, как первая аликвота была отобрана из пробирки для суспензии;
при этом контроллер, в ответ на измеренную мутность суспензии, управляет первым роботизированным пипетатором для коррекции объема образца в суспензии для обеспечения предварительно определенного количества образца для AST теста, при этом контроллер дополнительно управляет первым роботизированным пипетатором для получения аликвоты суспензии, имеющей объем, который будет нести предварительно определенное количество образца, и инокуляции пробирки для анализа для AST теста;
второе переносящее устройство в сообщении с контроллером, причем контроллер направляет переносящему устройству инструкции по переносу инокулированной пробирки для AST анализа ко второй станции; контроллер находится в сообщении со вторым пипетатором на второй станции, причем контроллер направляет второму пипетатору инструкции по получению аликвоты из инокулированной пробирки для анализа и по дозированию аликвоты в панель для AST теста; и вторая станция дополнительно содержит переносящий робот для переноса инокулированной панели для AST от второй станции.
15. Система по п. 14, причем переносящий робот для переноса инокулированной панели для AST представляет собой захватывающее приспособление для панели, включающее в себя захватывающий планшет, причем захватывающий планшет соединен со штангой управляемого по трем осям шаговым электродвигателем крепления таким образом, чтобы захватывающий планшет мог поворачиваться относительно оси соединительного элемента из первого положения во второе положение; и при этом захватывающий планшет включает в себя захватывающую поверхность, которая выполнена с возможностью захвата объектов.
16. Система по п. 14, дополнительно содержащая детектор для выявления того, образуется ли нить образца, когда первый робот переносит инструмент для сбора, несущий образец, от чашки для культивирования; причем нить выявляется посредством оптического или электрического мониторинга инструмента для сбора, когда инструмент для сбора поднимается от чашки для культивирования, причем система дополнительно содержит механизм для срезания нити, выбранный из группы, состоящей из режущего инструмента, ультразвуковой обработки, высушивания и заморозки.
17. Автоматизированная система для приготовления суспензии одного образца, аликвоты из которого отбираются для идентификации (ID) микроорганизмов в образце и второго теста, причем система содержит:
по меньшей мере первую секцию для приготовления образца для ID анализа, при этом первая секция содержит:
средство для получения засеянной культуры;
причем автоматизированная система находится в сообщении с визуализирующим средством для обеспечения информации от изображения засеянной колонии, которая применяется для идентификации колонии на засеянной культуре и обозначения такой колонии для автоматизированного сбора образца;
роботизированный инструмент для сбора;
средство для сообщения местоположения колонии роботизированному инструменту для сбора;
средство для управления сбором колонии роботизированным инструментом для сбора, причем роботизированный инструмент для сбора дополнительно сконфигурирован для переноса собранного образца к первой станции для приготовления суспензии образца;
средство для обеспечения жидкости для суспензии в пробирку для суспензии на первой станции приготовления образца, причем роботизированный инструмент для сбора сконфигурирован таким образом, чтобы осаждать собранный образец в жидкость для суспензии;
нефелометр на первой станции для измерения мутности суспензии, причем автоматизированная система в ответ на измерение мутности, которое находится вне предварительно определенного значения мутности, корректирует одно из количества образца или количества суспензии в пробирке для суспензии для обеспечения суспензии с концентрацией образца в предварительно определенном диапазоне;
первый роботизированный пипетатор, причем первый роботизированный пипетатор получает первую аликвоту суспензии на первой станции и инокулирует сосуд для применения в ID анализе; и
средства для переноса пробирки для суспензии с остальной частью суспензии с первой станции для приготовления суспензии образца на вторую станцию для приготовления суспензии образца;
причем первый роботизированный пипетатор дополнительно сконфигурирован для того, чтобы получить объем образца в пробирке для суспензии для получения предварительно определенного количества образца для второго анализа.
18. Автоматизированная система по п. 17, дополнительно содержащая:
вторую секцию для инокуляции панели для AST анализа; причем автоматизированная система имеет средство для переноса инокулированной пробирки для образца из первой секции во вторую секцию; причем вторая секция имеет второй роботизированный пипетатор, который получает аликвоту из инокулированной пробирки для образца и инокулирует панель для полученной аликвотой.
19. Автоматизированная система по п. 18, дополнительно содержащая робот, который загружает инокулированную панель в аппарат, в котором осуществляют AST, аппарат для AST, сконфигурированный таким образом, чтобы он имел по меньшей мере две двери, причем первая дверь получает панель от робота, загружающего панель, причем робот для переноса инокулированной панели для AST представляет собой захватывающее приспособление для панели, включающее в себя захватывающий планшет, причем захватывающий планшет соединен со штангой управляемого по трем осям шаговым электродвигателем крепления таким образом, чтобы захватывающий планшет мог поворачиваться относительно оси соединительного элемента из первого положения во второе положение; и при этом захватывающий планшет включает в себя захватывающую поверхность, которая выполнена с возможностью захвата объектов;
детектор для выявления того, образуется ли нить образца, когда роботизированный инструмент для сбора переносит образец от чашки для культивирования, причем нить выявляется посредством оптического или электрического мониторинга инструмента для сбора, когда инструмент для сбора поднимается от чашки для культивирования;
механизм для срезания нити, выбранный из группы, состоящей из режущего инструмента, ультразвуковой обработки, высушивания и заморозки;
корпус, определяющий внутреннее пространство для приема картриджа, содержащего анализируемый материал для проведения тестов;
первую дверь, соединенную с корпусом на его первой стороне и сконфигурированную для получения множества панелей для проведения AST тестов во внутреннем пространстве корпуса, причем панели получают при функционировании в ручном режиме; вторую дверь, соединенную с корпусом на его второй стороне; и
исполнительный механизм привода двери, связанный со второй дверью и сконфигурированный для обеспечения функционирования двери при автоматической активации исполнительного механизма привода двери для получения множества панелей для проведения тестов во внутреннем пространстве корпуса, причем панели получают при функционировании в автоматическом режиме из второй секции.
| US 2015086971 A1, 26.03.2015 | |||
| US 2012009558 A1, 12.01.2012 | |||
| US 6323035 B1, 27.11.2001 | |||
| DE 112010002799 T5, 08.11.2012 | |||
| СПОСОБ ИДЕНТИФИКАЦИИ МИКРООРГАНИЗМОВ ИЗ ТЕСТИРУЕМОГО ОБРАЗЦА ГЕМОКУЛЬТУРЫ | 2009 |
|
RU2541775C2 |

