Настоящее изобретение относится к способу оценки угловой скорости железнодорожного транспортного средства, движущегося по пути, содержащего инерционный блок, содержащий, по меньшей мере, один датчик угловой скорости, при этом способ содержит этап измерения моментальной угловой скорости, выдаваемой датчиком,
отличающийся тем, что содержит:
- этап определения отклонения угловой скорости, измеряемой вокруг, по меньшей мере, одной оси, при этом отклонение скорости принимают равным значению угловой скорости, измеряемой вокруг этой оси, когда указанная измеряемая угловая скорость является по существу постоянной в течение заранее определенного времени; и
- этап вычисления оценочной угловой скорости посредством вычитания ранее определенного отклонения скорости из измеренной угловой скорости.
Для определения своей скорости и пройденного по пути расстояния железнодорожные транспортные средства оборудованы колесными датчиками, позволяющими измерять вращение одного или нескольких колес транспортного средства.
Измерения, производимые при помощи колесных датчиков, часто являются трудно применимыми или неточными по причине проскальзывания колеса относительно рельса. Это проскальзывание происходит либо во время фаз ускорения транспортного средства, либо во время фаз торможения.
Было предложено производить измерения ускорения, скорости и положения при помощи инерционного блока, однако данные, выдаваемые инерционными блоками, которыми оборудованы транспортные средства, тоже имеют погрешности, вытекающие из неточностей или отклонений, связанных с применяемой технологией.
На практике, чтобы снизить расходы по изготовлению, в этих инерционных блоках часто применяют технологии МЭМС, которые по своей конструкции выдают значения с отклонениями.
Изобретение призвано предложить способ и устройство, которые позволяют получать надежную информацию о пройденном расстоянии или о скорости железнодорожного транспортного средства на основании данных, поступающих, в частности, из инерционного блока.
В связи с этим объектом изобретения является способ оценки угловой скорости вышеуказанного железнодорожного транспортного средства, движущегося по пути, отличающийся тем, что содержит:
- этап определения отклонения угловой скорости, измеряемой вокруг, по меньшей мере, одной оси, при этом отклонение скорости принимают равным значению угловой скорости, измеряемой вокруг этой оси, когда указанная измеряемая угловая скорость является по существу постоянной в течение заранее определенного времени; и
- этап вычисления оценочной угловой скорости посредством вычитания ранее определенного отклонения скорости из измеренной угловой скорости.
Согласно частным вариантам осуществления способ содержит один или несколько следующих отличительных признаков:
- угловую скорость измеряют вокруг оси, параллельной плоскости движения железнодорожного транспортного средства и перпендикулярной к направлению движения железнодорожного транспортного средства, отклонение измеряемой угловой скорости определяют, когда наклон пути, по которому движется железнодорожное транспортное средство, является постоянным, и оценочную угловую скорость вычисляют на основании ранее определенного отклонения, когда наклон пути, по которому движется железнодорожное транспортное средство, меняется;
- угловую скорость измеряют вокруг оси, перпендикулярной к плоскости движения железнодорожного транспортного средства, отклонение измеряемой угловой скорости определяют, когда путь, по которому движется железнодорожное транспортное средство, является прямолинейным или имеет постоянную кривизну, и оценочную угловую скорость вычисляют на основании ранее определенного отклонения, когда путь, по которому движется железнодорожное транспортное средство, имеет переменную кривизну;
- угловую скорость измеряют вокруг оси, параллельной направлению движения железнодорожного транспортного средства, отклонение измеряемой угловой скорости определяют, когда путь, по которому движется железнодорожное транспортное средство, имеет постоянный поперечный наклон, и оценочную угловую скорость вычисляют на основании ранее определенного отклонения, когда путь, по которому движется железнодорожное транспортное средство, имеет переменный поперечный наклон;
- способ дополнительно содержит фазу оценки ускорения, включающую в себя этап измерения моментального ускорения железнодорожного транспортного средства вдоль направления движения транспортного средства при помощи датчика ускорения, которым оборудовано железнодорожное транспортное средство, при этом способ содержит:
- этап определения отклонения измеряемого ускорения, при этом отклонение ускорения принимают равным значению измеренного моментального ускорения, когда железнодорожное транспортное средство стоит на месте; и
- этап вычисления оценочного ускорения посредством вычитания ранее определенного отклонения ускорения из измеренного моментального ускорения;
- способ дополнительно содержит фазу оценки ускорения, включающую в себя этап измерения моментального ускорения железнодорожного транспортного средства вдоль направления движения транспортного средства при помощи датчика ускорения, которым оборудовано железнодорожное транспортное средство, при этом способ содержит этап измерения ускорения железнодорожного транспортного средства при помощи колесного датчика, выполненного с возможностью определения скорости вращения колеса, и содержит:
- этап определения отклонения измеряемого ускорения, при этом отклонение ускорения принимают равным разности среднего ускорения, измеряемого колесным датчиком и датчиком ускорения за заранее определенный период времени, в течение которого колесо не проскальзывает относительно рельса, и
- этап вычисления оценочного ускорения посредством вычитания ранее определенного отклонения из измеренного моментального ускорения;
- этап определения отклонения ускорения осуществляют, только если период времени, в течение которого колесо не проскальзывает относительно рельса, имеет продолжительность более 1 секунды.
Объектом изобретения является также способ оценки ускорения, скорости или положения железнодорожного транспортного средства, отличающийся тем, что включает в себя:
- оценку угловой скорости железнодорожного транспортного средства вокруг трех взаимно перпендикулярных направлений при помощи вышеуказанного способа,
- оценку ускорения транспортного средства вдоль направления движения при помощи вышеуказанного способа,
и содержит этап расчета ускорения, скорости или положения железнодорожного транспортного средства посредством коррекции ускорения, оцененного на основании оценочных угловых скоростей, и возможного интегрирования.
Объектом изобретения является также устройство для оценки угловой скорости железнодорожного транспортного средства, движущегося по пути, при этом транспортное средство содержит, по меньшей мере, один датчик угловой скорости, выполненный с возможностью измерения моментальной угловой скорости, отличающееся тем, что содержит:
- средства определения отклонения угловой скорости, измеряемой вокруг, по меньшей мере, одной оси, при этом отклонение скорости принимают равным значению угловой скорости, измеряемой вокруг этой оси, когда указанная измеряемая угловая скорость является по существу постоянной в течение заранее определенного времени; и
- средства вычисления оценочной угловой скорости, определяемой посредством вычисления ранее определенного отклонения скорости из измеренной угловой скорости.
Объектом изобретения является также железнодорожное транспортное средство, содержащее вышеуказанное устройство.
Изобретение будет более очевидно из нижеследующего описания, представленного исключительно в качестве примера, со ссылками на прилагаемые чертежи, на которых:
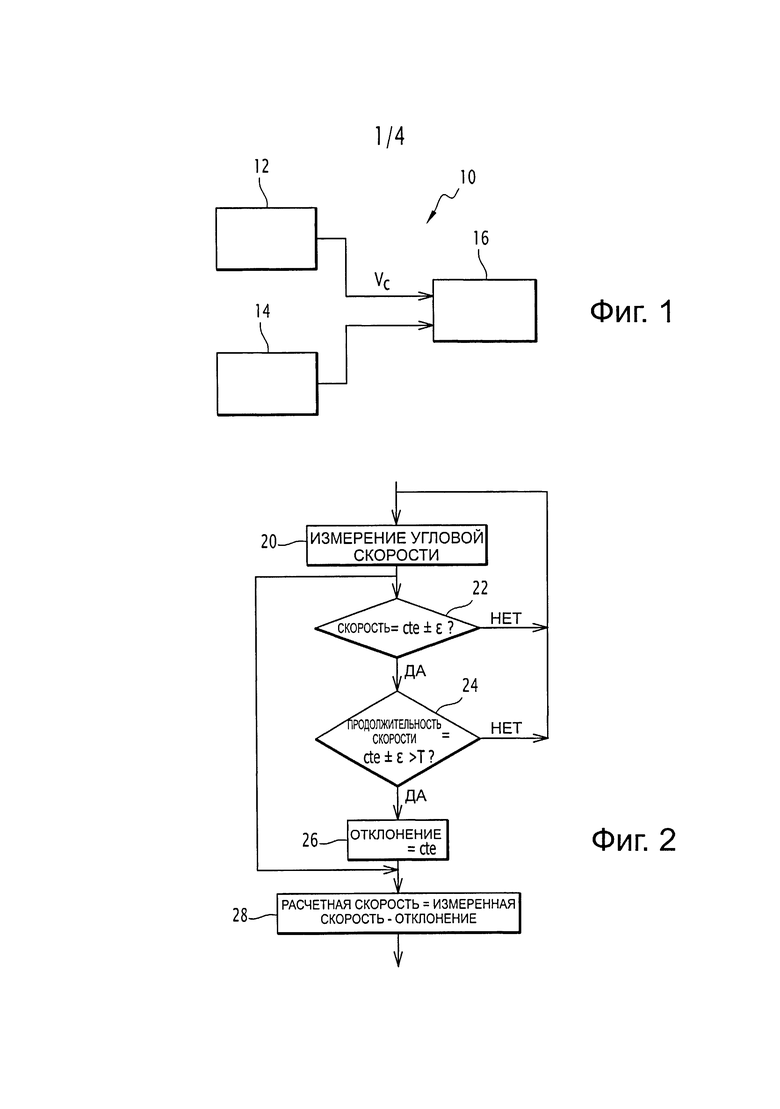
фиг.1 - схематичный вид устройства оценки скорости, применяемого в транспортном средстве в соответствии с изобретением;
фиг.2 - блок-схема алгоритма, применяемого для коррекции одной из измеряемых скоростей;
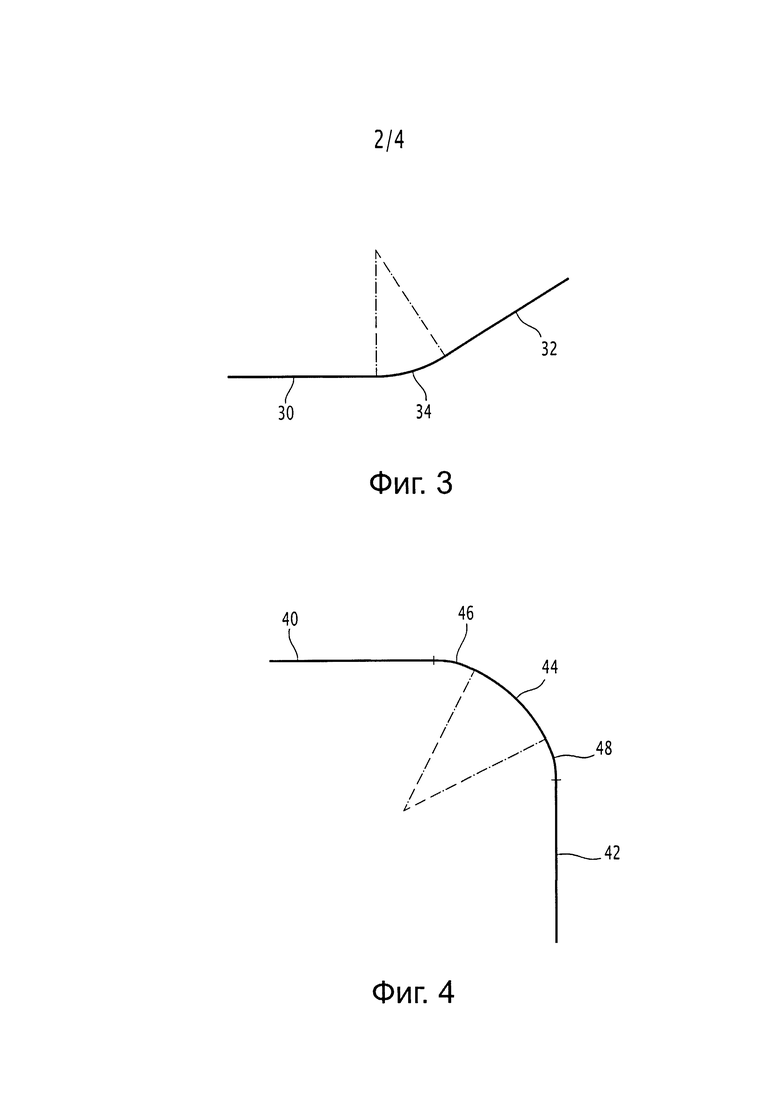
фиг.3 - схематичный вид сбоку подъема пути движения железнодорожного транспортного средства;
фиг.4 - вид сверху пути движения железнодорожного транспортного средства;
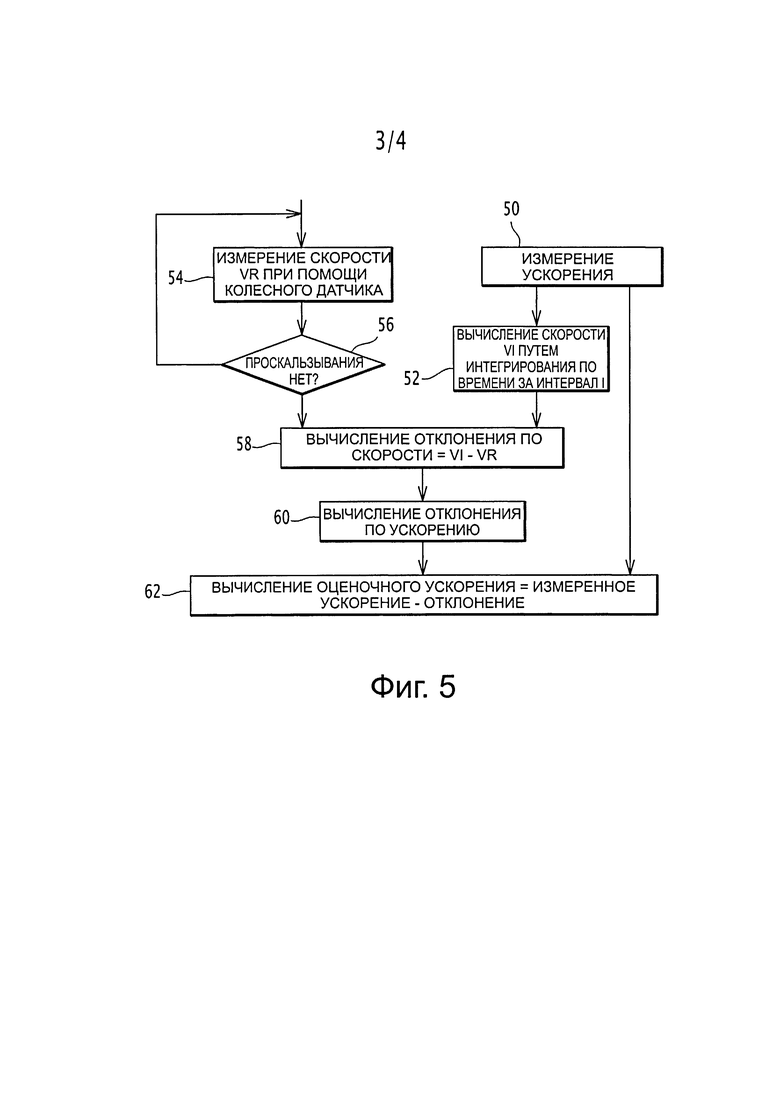
фиг.5 - блок-схема алгоритма, применяемого для коррекции измеряемого ускорения;
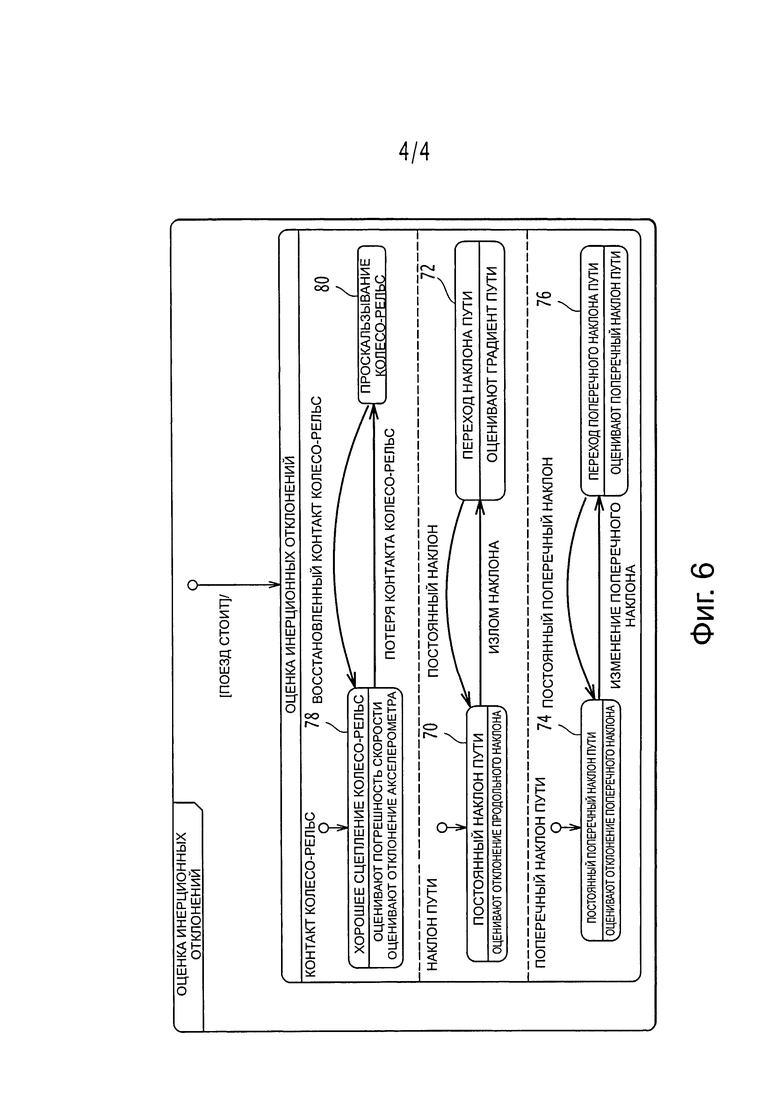
фиг.6 - схема состояний устройства в соответствии с изобретением.
Устройство, представленное на фиг.1, установлено на железнодорожном транспортном средстве, например на локомотиве пассажирского поезда или товарного поезда. Оно выполнено с возможностью вычисления скорости и расстояния, пройденного транспортным средством.
Транспортное средство, на котором установлено устройство 10, содержит, по меньшей мере, на одном колесе колесный датчик 12, включающий в себя колесико с вырезами, неподвижно соединенное с колесом, и оптический датчик, закрепленный на конструкции транспортного средства. Оптический датчик выполнен с возможностью обнаружения прохождения вырезов во время вращения колесика. Такой датчик сам по себе известен, и его описание опускается.
Колесный датчик выдает скорость вращения колеса, на основании которой вычисляют моментальную измеряемую скорость, обозначенную Vc, посредством умножения этой скорости вращения на радиус колеса. Кроме того, он выдает ускорение колеса.
Транспортное средство содержит также инерционный блок 14, включающий в себя, по меньшей мере, один акселерометр и три гироскопа. Предпочтительно этот инерционный блок основан на технологии МЭМС.
Предпочтительно инерционный блок содержит три акселерометра, каждый из которых выполнен с возможностью определения ускорения вдоль трех взаимно перпендикулярных осей. Так, первый акселерометр выполнен с возможностью определения ускорения вдоль оси X транспортного средства, соответствующей направлению движения транспортного средства по пути. Другой датчик расположен вдоль в основном горизонтальной оси Y, поперечной по отношению к транспортному средству, и третий датчик - вдоль в основном вертикальной оси Z, тоже поперечной по отношению к транспортному средству.
Кроме того, три гироскопа выполнены с возможностью определения угловых скоростей  ,
,  ,
,  транспортного средства соответственно вокруг вышеуказанных осей X, Y и Z.
транспортного средства соответственно вокруг вышеуказанных осей X, Y и Z.
Колесный датчик 12 и инерционный блок 14 связаны, каждый, с центральном блоком обработки данных 16 для одометрического вычисления скорости и расстояния, пройденного транспортным средством, на основании данных, поступающих из инерционного блока и скорректированных при помощи данных, поступающих от колесного датчика.
Данные о расстоянии, пройденном транспортным средством, а также данные скорости вычисляют только на основании измеренных данных, поступающих из инерционного блока, а измеренные данные, поступающие от колесного датчика, служат только для коррекции возможных отклонений в измерениях, поступающих из инерционного блока.
Как известно, инерционный блок 16 обеспечивает вычисление скорости транспортного средства и пройденного расстояния посредством интегрирования, - относительно соответственно простого и двойного времени, - ускорения, измеряемого вдоль оси X, с учетом наклона транспортного средства, вокруг осей X, Y и Z, и других данных, выдаваемых инерционным блоком.
Ниже более подробно представлены варианты вычисления скорости и расстояния, пройденного транспортным средством.
Используют следующую терминологию:
DT= расстояние, пройденное железнодорожным транспортным средством;
ST= продольная скорость железнодорожного транспортного средства;
AT= продольное ускорение железнодорожного транспортного средства.
Эти величины можно выразить следующим образом:
ST(t)=AT(t)*dt+ST(0)
DT(t)=ST(t)*dt+DT(0).
Если инерционное ускорение, измеренное датчиком ускорения, установленным вдоль оси X, обозначить  , при этом grade обозначает наклон или градиент пути и g обозначает силу земного притяжения,
, при этом grade обозначает наклон или градиент пути и g обозначает силу земного притяжения,
то, пока grade является небольшим, получаем:  .
.
Если  обозначает скорость вращения вокруг оси Y, измеренную инерциальным блоком, cant обозначает «возвышение» пути,
обозначает скорость вращения вокруг оси Y, измеренную инерциальным блоком, cant обозначает «возвышение» пути,  и
и  обозначают соответственно скорости вращения, измеренные вокруг осей Z и X, то получаем
обозначают соответственно скорости вращения, измеренные вокруг осей Z и X, то получаем

где
и, таким образом,

Следовательно, значения ускорения, скорости и положения железнодорожного транспортного средства можно оценить только на основании значений



и известных исходных условий, в частности, что касается скорости ST(0).
Другие данные, в частности, о наклоне железнодорожного транспортного средства, поступают от датчиков угловой скорости. Эта данные угловой скорости интегрируют относительно времени при помощи одометрического блока обработки 16 для определения положения транспортного средства.
На практике каждое значение, измеренное инерционным блоком 14, имеет отклонение.
Согласно изобретению способ, применяемый блоком обработки 16, обеспечивает коррекцию каждого из отклонений измерений, производимых датчиками угловой скорости инерционного блока, при помощи алгоритма, представленного на фиг.2, и измеренного ускорения  при помощи алгоритма, представленного на фиг.5, для получения расчетных значений угловой скорости и ускорения, которые равны соответствующему измеренному значению, из которого вычли ранее вычисленное отклонение.
при помощи алгоритма, представленного на фиг.5, для получения расчетных значений угловой скорости и ускорения, которые равны соответствующему измеренному значению, из которого вычли ранее вычисленное отклонение.
Таким образом, для конкретного измерения угловой скорости вокруг оси алгоритм, показанный на фиг.2, применяют циклично.
На этапе 20 измеряют угловую скорость.
На этапе 22 осуществляют тест, чтобы определить, является ли измеренная скорость по существу равной ранее измеренной скорости, то есть при разности, меньшей очень малого значения ε. При положительном результате на этапе 24 осуществляют второй тест, чтобы определить, является ли угловая скорость по существу постоянной в интервале времени продолжительностью, превышающей заранее определенное время T.
При положительном результате на этапе 26 отклонение принимают равным постоянному значению скорости, отмеченному в заранее определенном интервале T. Предпочтительно интервал T имеет продолжительность от 5 до 30 секунд.
На этапе 28 расчетную угловую скорость вычисляют как измеренную угловую скорость, скорректированную по последнему отклонению, вычисленному на этапе 26.
Таким образом, для каждой угловой скорости, измеренной на этапе 20, на этапе 28 определяют расчетную скорость на основании последнего отклонения, вычисленного по истечении заранее определенного периода T, в течение которого угловая скорость оставалась постоянной.
Если результаты тестов 22 и 24 являются отрицательными, повторяют этап 20 для непрерывного получения расчетной угловой скорости.
Вычисленная таким образом расчетная угловая скорость дает очень удовлетворительную информацию о реальной угловой скорости.
Действительно, если рассматривать угловую скорость вокруг оси Y, то становится понятно, что, пока транспортное средство движется по горизонтальному пути или по участку пути с постоянным наклоном, как участки 30 и 32, показанные на фиг.3, угловая скорость вокруг оси Y является нулевой. Если расчетная скорость на участках не равна нулю, то измеренная скорость соответствует отклонению, которое необходимо корректировать.
При прохождении соединительного участка 34, часто представляющего собой сегмент окружности, расчетную скорость принимают равной измеренной скорости, скорректированной по отклонению, определенному на предыдущем горизонтальном участке с постоянным наклоном, и получают правильную расчетную угловую скорость. Во время прохождения криволинейного участка 34 не производят никакой коррекции отклонения.
Точно так же, как показано на фиг.4, во время движения по прямолинейному участку, показанному сверху, такому как участки 40 и 42, поскольку путь не имеет поперечного наклона и является прямолинейным, угловые скорости вокруг осей Y и Z должны быть нулевыми. Если это не так, производят коррекцию отклонения согласно алгоритму, представленному на фиг.2, вычитая постоянное значение измеряемой скорости из измеренной скорости.
Точно так же, во время движения по участку, показанному сверху в виде участка окружности 44, поперечный наклон пути и, следовательно, транспортного средства является постоянным с учетом конструкции пути, поэтому обычно угловая скорость вокруг оси должна быть нулевой. Если это не так, производят коррекцию при помощи алгоритма, показанного на фиг.2.
Во время прохождения участка с непостоянным радиусом кривизны, показанного сверху в виде участка клотоиды 46, 48, часто применяемого для соединения кругового участка с прямолинейным участком, не производят никаких вычислений отклонения для скорости вращения вокруг осей X, Y и Z и коррекцию угловых скоростей производят с последним вычисленным отклонением.
Отклонение по ускорению вычисляют и учитывают для измерения и вычисления ускорения, рассчитываемого согласно одному из следующих методов.
Первый метод состоит в определении, когда железнодорожное транспортное средство стоит на месте, и в измерении ускорения, выдаваемого датчиком. При этом отклонение принимают равным измеренному ускорению, поскольку во время стоянки ускорение должно быть нулевым.
Затем, когда транспортное средство движется, измеряемое ускорение принимают равным измеренному ускорению за вычетом вычисленного таким образом последнего отклонения. В этом варианте выполнения колесный датчик не нужен.
Согласно другому варианту выполнения, отклонение по измеряемому ускорению определяют при помощи алгоритма, представленного на фиг.5.
На этапе 50 в непрерывном режиме измеряют ускорение. На этапе 52 вычисляют скорость посредством интегрирования в течение времени значений ускорения, измеренных на этапе 50.
Параллельно, на этапе 54 производят измерение скорости колес транспортного средства при помощи колесного датчика. На этапе 56 осуществляют тест, чтобы определить, не проскальзывает ли колесо по отношению к рельсу и является ли удовлетворительным сцепление. Одновременно определяют интервал времени t отсутствия проскальзывания, в течение которого колесо не скользит.
Определение возможного проскальзывания осуществляют при помощи любых соответствующих известных методов.
В отсутствие проскальзывания, отслеживаемого за интервал I продолжительностью, превышающей одну секунду, на этапе 58 производят вычисление отклонения по скорости путем определения разности между скоростью, вычисленной на этапе 52, и скоростью, измеренной на этапе 54.
На этапе 60 производят вычисление отклонения по ускорению путем определения разности между ускорением колеса и измеренным ускорением, усредненными за интервал I или меньший I, но превышающий одну секунду.
Наконец, на этапе 62 производят вычисление расчетного ускорения для каждого ускорения, измеренного на этапе 50, путем определения разности между измеренным ускорением и последним отклонением, вычисленным на этапе 60.
В отсутствие длинного интервала более 1 секунды без проскальзывания не вычисляют никакого нового отклонения на ускорении.
Ситуацию можно подытожить при помощи диаграммы состояний, показанной на фиг.6.
На этой диаграмме видно, что, если рассматривать наклон пути, то есть учитывать угловую скорость вокруг оси Y, на этапе 60 производят оценку отклонения угловой скорости вокруг оси Y (отклонение продольного наклона), когда наклон пути является постоянным. Во время переходов наклона пути, представленных в виде состояния 72, производят оценку градиента пути, то есть угловой скорости вокруг оси Y. Переходы между этими двумя состояниями происходят в зависимости от того, является ли наклон постоянным или есть ли прерывание наклона. Эти два переходных состояния обнаруживают, когда угловая скорость вокруг оси Y становится меньше порога, близкого к 0.
Точно так же, чтобы учитывать деформацию пути в горизонтальной плоскости или поперечный наклон пути, оценку отклонения угловой скорости вокруг оси X осуществляют на этапе 74, когда поперечный наклон пути является постоянным.
С другой стороны, на этапе 72 по время перехода поперечного наклона пути отклонение угловой скорости вокруг оси X перестают рассчитывать, но при этом производят оценку поперечного наклона пути.
Переходы между состояниями 74 и 76 происходят в зависимости от того, становится ли поперечный наклон постоянным или меняется, то есть является ли угловая скорость вокруг оси X нулевой или отличной от нуля.
Что касается отклонения по ускорению, в состоянии 78 при обнаруженном хорошем сцеплении между рельсом и колесом отклонение ускорения оценивают при помощи алгоритма, показанного на фиг.5, так же, как и отклонение скорости.
С другой стороны, во время состояния проскальзывания рельс/колесо 80 отклонение скорости и отклонение ускорения не рассчитывают и производят только оценку ускорения на основании ранее вычисленных отклонений и произведенных измерений.
Переходы между двумя состояниями происходят во время появления или исчезновения проскальзывания между колесом и рельсом.
Настоящее изобретение относится к способу оценки угловой скорости железнодорожного транспортного средства. Объектом изобретения является способ оценки угловой скорости железнодорожного транспортного средства, движущегося по пути, содержащего инерционный блок (14), содержащий, по меньшей мере, один датчик угловой скорости, при этом способ содержит этап измерения моментальной угловой скорости, выдаваемой датчиком. Способ содержит: этап определения отклонения угловой скорости, измеряемой вокруг, по меньшей мере, одной оси, при этом отклонение скорости принимают равным значению угловой скорости, измеряемой вокруг этой оси, когда указанная измеряемая угловая скорость является по существу постоянной в течение заранее определенного времени (T); и этап вычисления оценочной угловой скорости посредством вычитания ранее определенного отклонения скорости из измеренной угловой скорости. Технический результат - повышение точности сигнала угловой скорости без использования дополнительных датчиков. 4 н. и 6 з.п. ф-лы, 6 ил.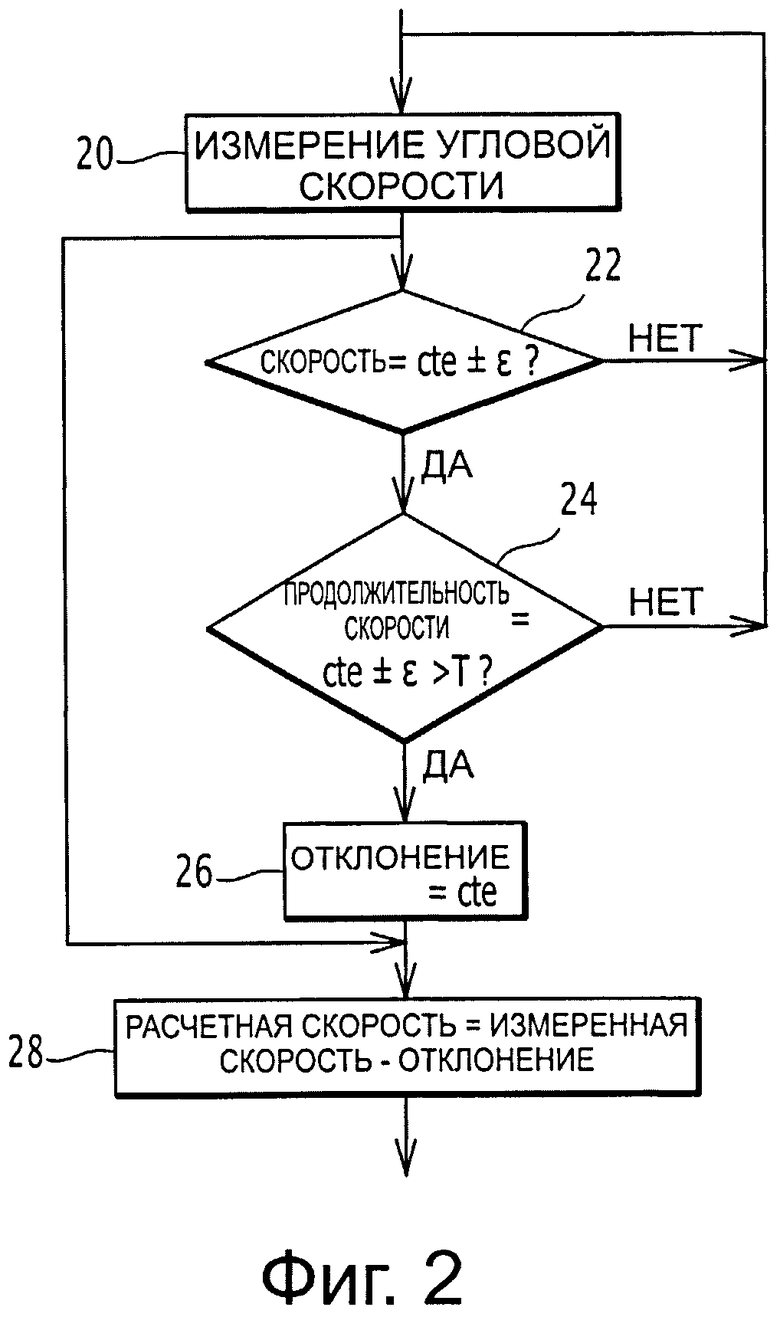
1. Способ оценки угловой скорости железнодорожного транспортного средства, движущегося по пути, содержащего инерционный блок (14), содержащий, по меньшей мере, один датчик угловой скорости, при этом способ содержит этап измерения моментальной угловой скорости (


отличающийся тем, что содержит:
- этап определения отклонения угловой скорости, измеряемой вокруг по меньшей мере одной оси, при этом отклонение скорости принимают равным значению угловой скорости, измеряемой вокруг этой оси, когда указанная измеряемая угловая скорость является по существу постоянной в течение заранее определенного времени (T); и
- этап вычисления оценочной угловой скорости посредством вычитания ранее определенного отклонения скорости из измеренной угловой скорости.
2. Способ оценки угловой скорости по п.1, отличающийся тем, что угловую скорость (
3. Способ оценки угловой скорости по п.1, отличающийся тем, что угловую скорость (
4. Способ оценки угловой скорости по п.1, отличающийся тем, что угловую скорость (
5. Способ оценки угловой скорости по любому из пп.1-4, отличающийся тем, что дополнительно содержит фазу оценки ускорения, включающую в себя этап измерения моментального ускорения (
- этап определения отклонения измеряемого ускорения, причем отклонение ускорения принимают равным значению измеряемого моментального ускорения, когда железнодорожное транспортное средство стоит на месте; и
- этап вычисления оценочного ускорения посредством вычитания ранее определенного отклонения ускорения из измеренного моментального ускорения.
6. Способ по любому из пп.1-4, отличающийся тем, что дополнительно содержит фазу оценки ускорения, включающую в себя этап измерения моментального ускорения (
- этап определения отклонения измеряемого ускорения, причем отклонение ускорения принимают равным разности среднего ускорения, измеряемого колесным датчиком (12) и датчиком ускорения за заранее определенный период времени, в течение которого колесо не проскальзывает относительно рельса, и
- этап вычисления оценочного ускорения посредством вычитания ранее определенного отклонения ускорения из измеренного моментального ускорения.
7. Способ по п.6, отличающийся тем, что этап определения отклонения ускорения осуществляют, только если период времени (I), в течение которого колесо не проскальзывает относительно рельса, имеет продолжительность более 1 секунды.
8. Способ оценки ускорения, скорости или положения железнодорожного транспортного средства, характеризующийся тем, что включает в себя:
оценку угловой скорости железнодорожного транспортного средства вокруг трех взаимно перпендикулярных направлений при помощи способа по любому из пп.1-7, и
этап расчета ускорения, скорости или положения железнодорожного транспортного средства посредством коррекции ускорения, оцененного на основании оценочных угловых скоростей, и возможного интегрирования.
9. Устройство для оценки угловой скорости железнодорожного транспортного средства, движущегося по пути, и содержащего по меньшей мере один датчик угловой скорости, выполненный с возможностью измерения моментальной угловой скорости, отличающееся тем, что содержит:
- средства (16) определения отклонения угловой скорости, измеряемой вокруг по меньшей мере одной оси, причем отклонение скорости принимается равным значению угловой скорости, измеряемой вокруг этой оси, когда указанная измеряемая угловая скорость является по существу постоянной в течение заранее определенного времени (T); и
- средства (16) вычисления оценочной угловой скорости, определяемой посредством вычитания ранее определенного отклонения скорости из измеренной угловой скорости.
10. Железнодорожное транспортное средство, содержащее устройство по п.9.
| Способ резки твердых и хрупких материалов | 1989 |
|
SU1705095A1 |
| US 2005137761 A1, 23.06.2005 | |||
| WO 2009074724 A1, 18.06.2009 | |||
| WO 2012010809 A1, 26.01.2012. | |||

